1. Introduction
Surface topography is defined as the interface between the part and surrounding medium, which is the concrete reflection of product precision. The form tolerance consists of flatness, cylindricity, roughness, straightness, etc. The assessment of the surface topography is essential for the performance validation of parts. The standardised method for obtaining an evaluation of surface topography is a coordinate measuring machine (CMM). However, the CMMs usually occupy enormous space and are time-consuming. Another approach is to use industrial CT to obtain complete workpiece scanning data and then coordinate measurement data with the CAD data [
1,
2], which is costly and inefficient.
The use of 3D optical measurement has been widely used in manufacturing, scene modelling and other fields because of its non-contact, fast measurement speed and high accuracy [
3,
4]. The 3D optical measurement can be divided into the passive method, such as binocular stereo vision, and active methods, such as time-of-flight and digital fringe projection [
5]. Compared with other methods, the digital fringe projection has high resolution, accuracy and speed. This study will focus on digital fringe projection-based surface topography error evaluation. Some work has been done for this method via different approaches to improve accuracy. Peng et al. [
6] proposed an adaptive grating method to calibrate the distortion error of the projector, which has the advantage of 0.0213 mm (RMS) standard plane measurement accuracy. Yang et al. [
7] studied the residual compensation method of projector distortion, this method needs two adjustments to the original raster image, and its standard plane measurement accuracy is 0.0435 mm. Recently, deep learning has been introduced into digital fringe projection. Shi et al. [
8] proposed a deep learning method based on enhanced tags and patches for phase recovery. Jeught et al. [
9] investigated a neural network with a large number of simulated data sets in the training process, extracting the height information of objects from a single fringe image. In metrological studies, multiscale methods are used to analyse surface topography. Brown et al. [
10] investigated multiscale analyses and characterization to provide correlations between topography and the performance of parts. Peta et al. [
11] introduced geometric multiscale methods into electrical discharge machining; it is possible to shape surface microgeometry. Kang et al. [
12] presented a contact model to describe normal and tangential contact behaviors of rough interface with a multiscale method; this model provides an effective way for studying the contact response of rough interface.
The 3D structured light system has the advantages of simple structure and low cost, hence quickly obtaining the measurement data of a workpiece [
13]. In practice, the result of optical measurement data is in the form of a point cloud. Take a grating structured light measurement system as an example [
14]; it processes the shot raster image to obtain the 3D point cloud of a workpiece, known as the measurement model.
The classical error analysis method of 3D optical measurement calculates the distance between point pairs after completing the registration of the measurement model and corresponding CAD model. However, obtaining the entire measurement model requires a splice point cloud from multi-view because a point cloud can only photograph the data at a particular projection direction [
15], which is high-cost and has splicing errors. To overcome the difficulty of error analysis from local data to whole CAD data, the common method in the industry is to post positioning markers [
16]. Nevertheless, it is evident that this method will increase the time and introduce manual intervention errors. Xie et al. [
17,
18] investigated multiple global descriptors to enhance the description of the point cloud formed by the key points and their neighbourhood to complete the localisation of aircraft partial skin. However, for some small parts, the data is obtained at a specific projection direction, which accounts for a large proportion of the whole digital model, such extensive local measurement data is hard to be broken into patches of the point cloud. The local descriptor method [
19] can complete small parts to complete registration, and the commonly used point cloud-based local descriptors depend on manual processes, such as Point Feature Histogram (PFH) [
20], Signature of Histogram of Orientation (Shot) [
21] and Ensemble of Shape Functions (ESF) [
22]. These descriptors are challenging to accurately describe the characteristics of particular parts and have low generalisation.
In addition to the global deformation analysis of the local point cloud, another critical issue to be addressed in implementing target surface error analysis is to split the point cloud into various functional surfaces accurately. Therefore, the research on the segmentation of measuring point clouds of some workpieces is still in the exploratory stage, one of the reasons is that the functional surface is related to the mutations, but some functional surfaces can be connected naturally and smoothly. According to these properties, Qie et al. [
23] employed conformal geometry to segment the mesh model of measured data and further studied logistic regression to smooth boundaries. However, the threshold values are difficult to generalise in this method for different parts. Yang et al. [
4] used the initial graphics exchange specification (IGES) file as a template to segment CT scan data for error analysis of interested surfaces; however, IGES files are large, and the description of some geometric entities is unstable [
24].
In summary, there are two problems to be solved in the error analysis of 3D optical measurement data:(1) how to accurately complete the local point cloud to the whole CAD model registration; (2) how to isolate the target surfaces on a local measurement model. To this end, a multivariate local descriptor registration method is introduced to solve the registration problem in this study. The aim of this method is to establish a complete part-in-whole point cloud registration process, including coarse and fine registration, and improve registration accuracy. Then, to avoid unnecessary functional surfaces and computational power, a local point cloud segmentation method to isolate target surfaces is presented. This study aims to illustrate the entire process of 3D structured light measurement and demonstrate the advantage of the method.
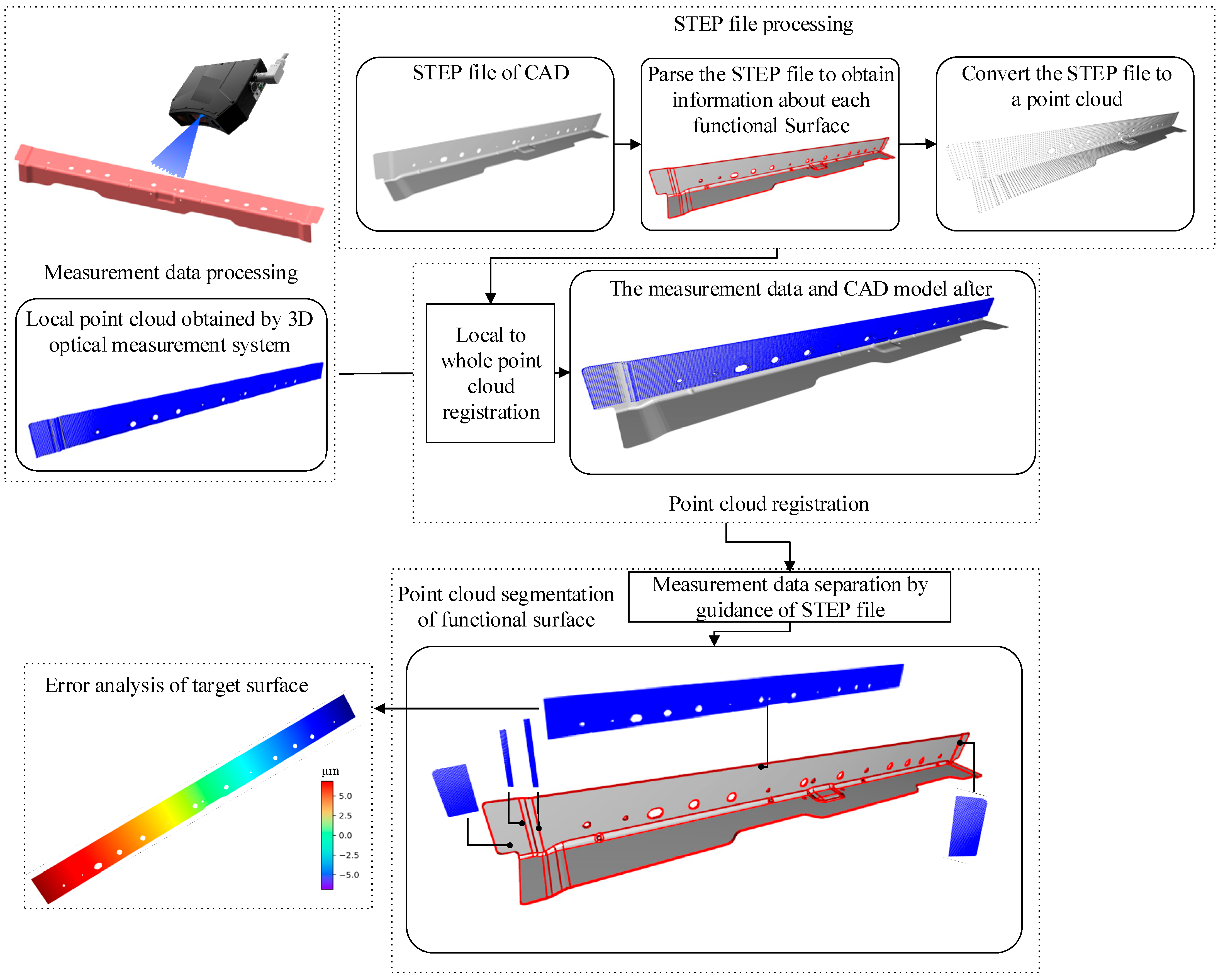
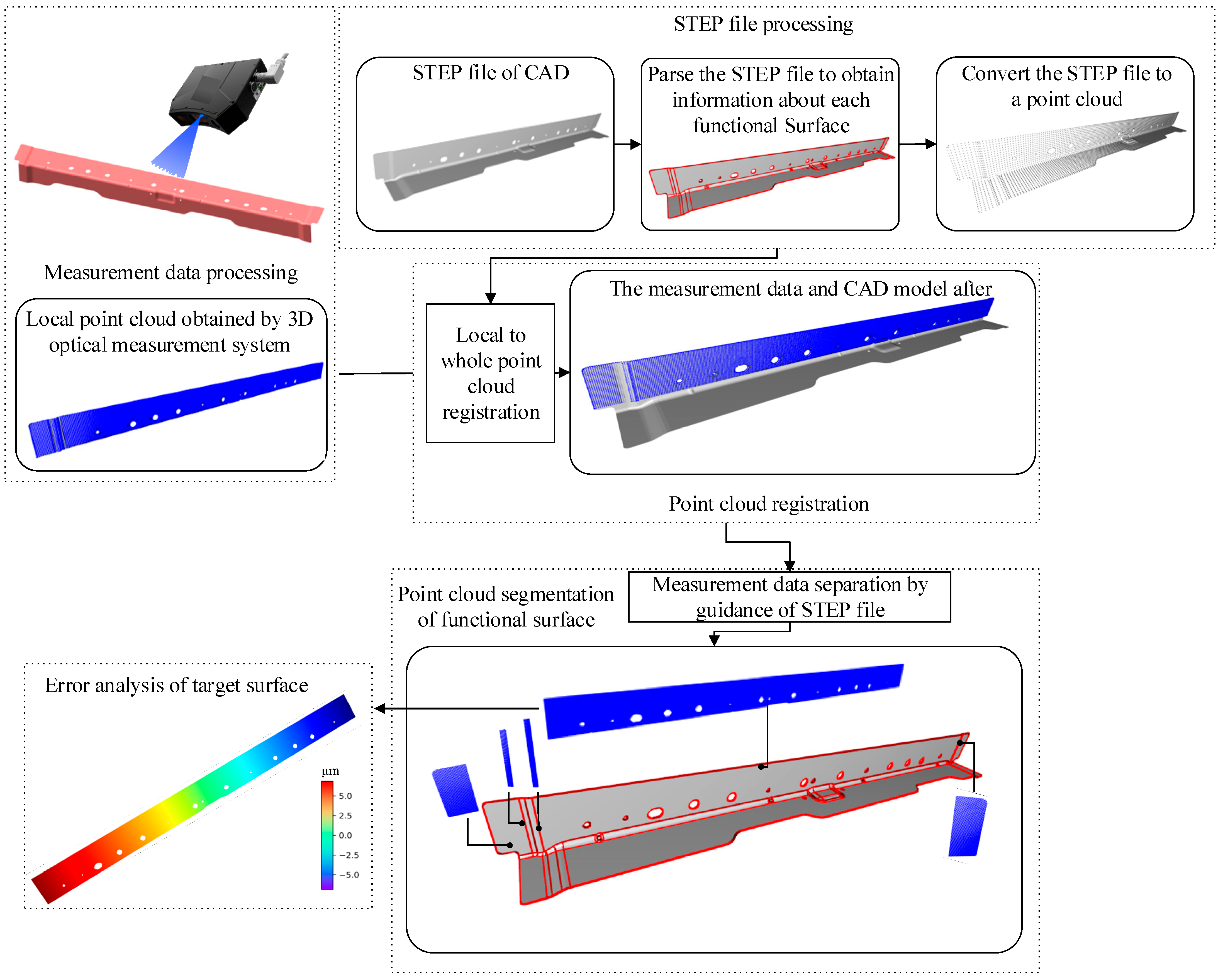
Figure 1 shows the framework of the implementation of the error analysis process. Firstly, the standard for the exchange of product (STEP) digital model is transformed into a point cloud. Then a multivariate local descriptor is used to complete the registration of the local point cloud to the STEP digital model. After registration, the STEP file is used as the reference to segment each functional surface in measurement data. Finally, the error analysis of the target surfaces is completed.
This paper is organised as follows:
Section 2 illustrates the details of generating functional surfaces and point clouds based on STEP files. The construction of local point cloud registration to the STEP model based on multivariate local descriptors is described in
Section 3.
Section 4 presents the segmentation method for the local point cloud. Experimental verification of the application and demonstration of its effectiveness and advantages are reported in
Section 5. A comparison of different evaluation methods is presented in
Section 6. Finally,
Section 7 concludes this paper and elaborates on future studies.
4. Local Point Cloud Segmentation
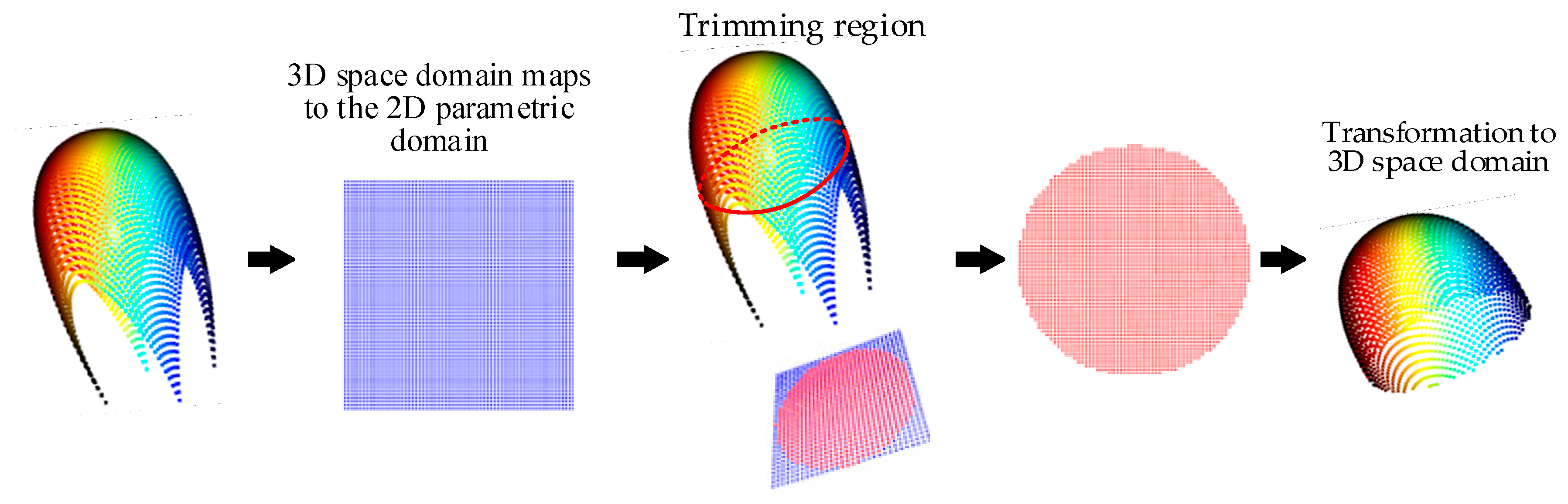
The surface topography analysis of all local measurement data can be conducted when the fine registration of LMPC and DMPC is completed. First, however, it is necessary to identify points and the functional surfaces associated with them. Let
be an LMPC, the determination of ownership between measuring points and the functional surface is through the Euclidean distance between the point and plane, then sorting the distance between the point and each surface and finding the closest surface is the corresponding functional surface. Before sorting, the point needs to be mapped to a 2D plane, and then the radial method is used to determine whether the point belongs to this plane. The distance from a point to the plane is expressed as Equation (16), where
n is the direction of the line, i.e., the normal direction of the plane,
p is a measurement point, and o is any point on the plane.
Compared with the triangular surface in stereolithography (STL) files, the curved surface can be composed of multiple quadrilateral planes.
Figure 10 illustrates the ownership judgement between a point and a curved surface, the point cloud is down-sampled to
Figure 10b, and a plane is represented by four points. Let
be a set of curved surfaces, where
is the quadrilateral plane. Similar to the ownership judgement of plane, if a point belongs to any plane in the set
P, then the point belongs to that surface (
Figure 10c). Generally, the fewer planes on the surface, the higher the judgment error and the less time.
7. Conclusions
This study presents a multi-component local descriptor method to optimize coarse registration precision. First, they obtain the measurement and digital model point cloud, further divided by the multi-scale RSCS. Then, multivariate descriptors were integrated to generate feature vectors, and the SAC-IA algorithm was applied to find the corresponding points, followed by the matching score to get the final position of the related points, and an ICP-based fine point cloud registration was carried out. Finally, the STEP file is applied to guide the measurement point cloud segmentation to complete the automatic error analysis of specific functional surfaces. In the experiment, this study selects the rear beam parts of an automobile for error analysis. One of the results is that the r-angle cylindricity is 0.881 mm, the roughness sq parameter is 0.219 mm, and the flatness of its plane is 1.037 mm. Compared with a micrometer, CMM and profilometer, the measurement results differ slightly; the results show that the proposed method can solve the challenging problem of automating error analysis based on optical measurement data.
The major contribution of this study is the development of a multivariate local descriptor registration method and segmentation method, which can be applied in a 3D structured light measurement system. The developed methods consider 3D surface topography measurement and improve registration accuracy compared to existing methods. Further, the methods are suitable for automatic error evaluation in the automobile industry when measurement for vehicle parts needs cost consideration.
The STEP file contains geometric information, which can not only serve as the guidance of point cloud segmentation but also complete some feature recognition and the mid-surface generation algorithm of CAE. However, although the proposed descriptors can improve registration precision, there are still registration failures for minimal shapes. Therefore, deep learning-based descriptors will be considered in the registration positioning stage to improve the registration robustness further in future work.


 ,
, 

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}