
Shielding Grounding Optimization Method for Spaceborne Multi-Cable
 ,
,
Abstract
:1. Introduction
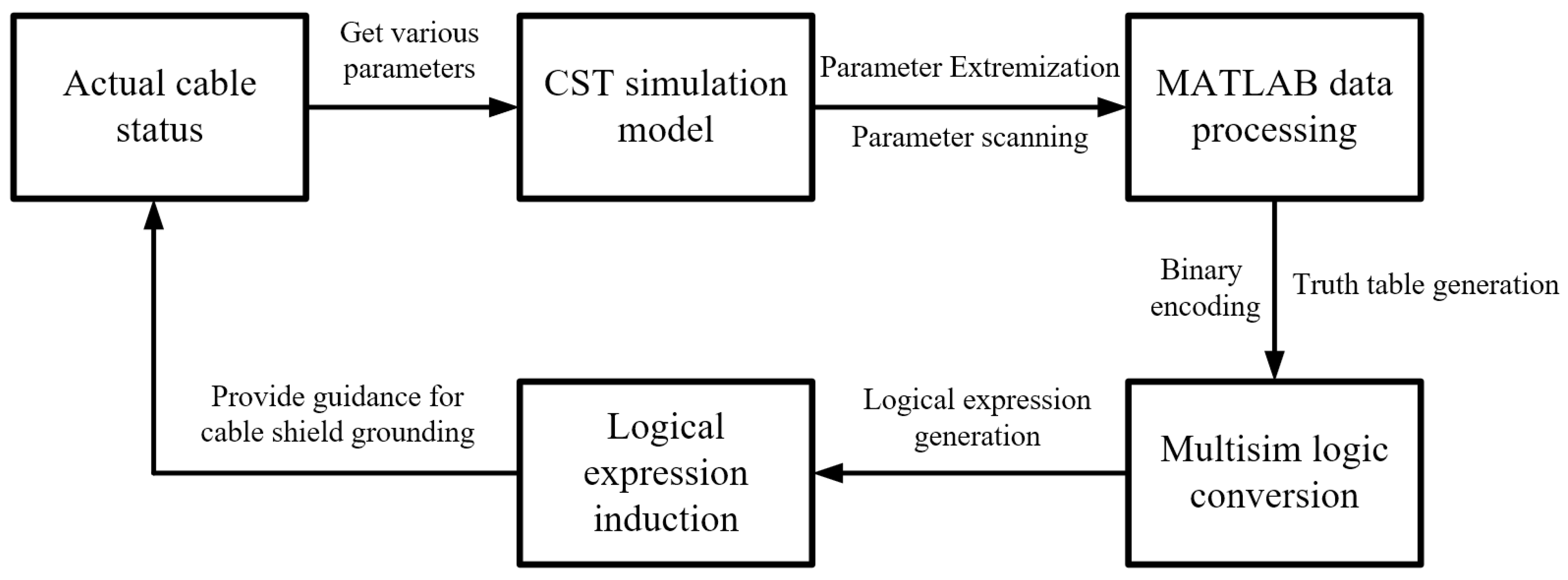
2. Shielding Grounding Optimization Method
2.1. CST Modeling and Simulation
2.2. MATLAB Transformation Truth Table
2.3. Multisim Conversion of Logical Expressions
2.4. Related Work
3. Experiments
- This system has multiple cables, and the electrical signals flowing through the cables vary in amplitude and frequency. Motor drive cable: internal three-twisted cable, transmitting 30 V, 12 kHz three-phase electricity, and a large source of interference. Field excitation cable: internal twisted cable, transmitting 4 V, and 5 kHz sinusoidal signal. Angle measurement cable: internal transmission of the induction synchronizer returns an angle signal, and in this target analysis cable, the signal is weak and vulnerable to interference.
- After the upper computer issues the scanning mirror fixed-point pointing command, the scanning mirror will point to a fixed angle, but due to the presence of external interference from the PWM signal to the motor drive and excitation signal to the induction synchronizer, the scanning mirror fluctuates around this fixed angle, affecting the angle accuracy. The magnitude of the external interference is directly reflected in the change in the angle accuracy, which can be used as an indicator to measure the shielding effect of different shield grounding states, and is more intuitive and convenient.
- This system functions under different conditions and at different sites, the scanning mirror angle accuracy varies greatly, and the shielding effects of different shield grounding states also differ; therefore, it is necessary to analyze and optimize this system.
4. Results and Analysis
4.1. Analysis of Logical Expressions
4.2. Analysis of Experimental Test Results
4.3. Interference Path Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Q. Research framework of remote sensing monitoring and real-time diagnosis of earth surface anomalies. Acta Geod. Cartogr. Sin. 2022, 51, 1141–1152. [Google Scholar]
- Wang, W.; Qu, J.J.; Hao, X.; Liu, Y.; Sommers, W.T. An improved algorithm for small and cool fire detection using MODIS data: A preliminary study in the southeastern United States. Remote Sens. Environ. 2007, 108, 163–170. [Google Scholar] [CrossRef]
- Junge, A.; Wolf, J.; Mora, N.; Rachidi, F.; Pelissou, P. Electromagnetic Interference Control Techniques for Spacecraft Harness. In Proceedings of the 2014 International Symposium on Electromagnetic Compatibility, Tokyo, Japan, 12–16 May 2014; pp. 840–843. [Google Scholar]
- IEEE Std 1143-2012; Insulated Conductors Committee of the IEEE Power Engineering Socie. IEEE Guide on Shielding Practice for Low Voltage Cables. IEEE: New York, NY, USA, March 2013; pp. 43–46.
- Morrison, R. Grounding and Shielding: Circuits and Interference, 6th ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2016; pp. 166–168. [Google Scholar]
- Zhou, M.; Guo, Y.; Zhao, W.; Cai, L.; Wang, J.; Yang, T. Comparison of Shielding Effectiveness of Different Shielding Methods for Multi-Core Cable on Lightning Surge Current. IEEE Trans. Electromagn. Compat. 2022, 64, 1742–1749. [Google Scholar] [CrossRef]
- Yaglidere, I. Analysis of low-frequency magnetic coupling in cables grounded at both ends. In Proceedings of the IEEE 2017 IV International Electromagnetic Compatibility Conference (EMC Turkiye), Ankara, Turkey, 24–27 September 2017; pp. 1–6. [Google Scholar]
- Watanabe, Y.; Uchida, T.; Sasaki, Y.; Oka, N.; Ohashi, H. Study on Grounding Condition of Shield Sheath in Shielded Twisted Pair Cable. In Proceedings of the 2014 International Symposium on Electromagnetic Compatibility, Tokyo, Japan, 12–16 May 2014; pp. 753–756. [Google Scholar]
- Ping, B.; Song, W.; Wang, C.; Zhang, W. Research on electromagnetic interference between power cables and shielded twisted-pair bundles. In Proceedings of the IEEE 6th International Symposium on Microwave, Antenna, Propagation, and EMC Technologies (MAPE), Shanghai, China, 28–30 October 2015; pp. 409–414. [Google Scholar]
- Wang, B.; Zhang, Y.; Su, G. An integrated approach for electromagnetic compatible commercial aircraft engine cable harnessing. J. Ind. Inf. Integr. 2022, 27, 100344. [Google Scholar] [CrossRef]
- D’Amore, M.; Sarto, M.S.; Scarlatti, A. Modeling of magnetic-field coupling with cable bundle harnesses. IEEE Trans. Electromagn. Compat. 2003, 45, 520–530. [Google Scholar] [CrossRef]
- Jin, Q.; Sheng, W.; Gao, C.; Han, Y. Internal and External Transmission Line Transfer Matrix and Near-Field Radiation of Braided Coaxial Cables. IEEE Trans. Electromagn. Compat. 2021, 63, 206–214. [Google Scholar] [CrossRef]
- Xiao, P.; Du, P.; Zhang, B. An Analytical Method for Radiated Electromagnetic and Shielding Effectiveness of Braided Coaxial Cable. IEEE Trans. Electromagn. Compat. 2019, 61, 121–127. [Google Scholar] [CrossRef]
- Jane, L.; Pralhad, R. Electromagnetic Interference and Noise Suppression. In Foundations of Pulsed Power Technology; Wiley-IEEE Press: Hoboken, NJ, USA, 2018; pp. 547–584. [Google Scholar]
- International Electrotechnical Commission (IEC). Metallic Communication Cable Test Methods-Part 4-6: Electromagnetic Compatibility (EMC)-Surface Transfer Impedance, 2nd ed.; IEC 62153-4-6; IEC: Geneva, Switzerland, 2017. [Google Scholar]
- International Electrotechnical Commission (IEC). Metallic Communication Cable Test Methods-Part 4-3: Electromagnetic Compatibility (EMC)-Surface Transfer Impedance, 2nd ed.; IEC 62153-4-3; IEC: Geneva, Switzerland, 2013. [Google Scholar]
- Santos, K.; de Andrade, C.; Silva, V.; Novo, M.; Fontgalland, G.; Bender, M.; Faria, D. Evaluation of Surface Transfer Impedance of Coaxial Cables. IEEE Lat. Am. Trans. 2020, 18, 598–603. [Google Scholar] [CrossRef]
- Verpoorte, J.; Schippers, H.; Rotgerink, J. Advanced models for the transfer impedance of metal braids in cable harnesses. In Proceedings of the 2018 IEEE International Symposium on Electromagnetic Compatibility and 2018 IEEE Asia-Pacific Symposium on Electromagnetic Compatibility (EMC/APEMC), Suntec City, Singapore, 14–18 May 2018; pp. 187–192. [Google Scholar]
- Gassab, O.; Bouguerra, S.; Zhou, L.; Yin, W.Y. Efficient Analytical Model for the Transfer Impedance and Admittance of Noncoaxial/Twinax Braided–Shielded Cables. IEEE Trans. Electromagn. Compat. 2020, 62, 2725–2736. [Google Scholar] [CrossRef]
- Mora, N.; Rachidi, F.; Pelissou, P.; Junge, A. An Improved Formula for the Transfer Impedance of Two-Layer Braided Cable Shields. IEEE Trans. Electromagn. Compat. 2015, 57, 607–610. [Google Scholar] [CrossRef]
- Elloumi, S.; Boulifa, B.; Jaoua, A.; Saleh, M.; Al Otaibi, J.; Frias, M.F. Inference engine based on closure and join operators over Truth Table Binary Relations. J. Log. Algebraic Methods Program. 2014, 83, 180–193. [Google Scholar] [CrossRef]
- Ciric, J.; Sechen, C. Efficient canonical form for Boolean matching of complex functions in large libraries. IEEE Trans. Comput.-Aided Des. Integr. Circuits Syst. 2003, 22, 535–544. [Google Scholar] [CrossRef]
- Rahmat, M.K.; Jovanovic, S.; Lo, K.L. Reliability Estimation of Uninterruptible Power Supply Systems: Boolean Truth Table Method. In Proceedings of the INTELEC 06-Twenty-Eighth International Telecommunications Energy Conference, Providence, RI, USA, 10–14 September 2006; pp. 1–6. [Google Scholar]
- Ke, H.; Morishita, K.; Hubing, T. Modeling Radiated Emissions Due to Power Bus Noise From Circuit Boards With Attached Cables. IEEE Trans. Electromagn. Compat. 2009, 51, 412–416. [Google Scholar]
- Shim, H.; Hubing, T.H. Model for estimating radiated emissions from a printed circuit board with attached cables due to Voltage-driven sources. IEEE Trans. Electromagn. Compat. 2005, 47, 899–907. [Google Scholar] [CrossRef]
- Deng, S.; Hubing, T.; Beetner, D. Estimating Maximum Radiated Emissions From Printed Circuit Boards With an Attached Cable. IEEE Trans. Electromagn. Compat. 2008, 50, 215–218. [Google Scholar] [CrossRef]
- Ji, R.; Gao, J.; Flowers, G.T.; Xie, G.; Cheng, Z.; Jin, Q. The Effect of Electrical Connector Degradation on High-Frequency Signal Transmission. IEEE Trans. Compon. Packag. Manuf. Technol. 2017, 7, 1163–1172. [Google Scholar] [CrossRef]
- Wang, Z.; Gao, J.; Flowers, G.T.; Wu, Y.; Xie, G.; Lv, Y. Modeling and Analysis of Signal Integrity of High-Speed Interconnected Channel With Degraded Contact Surface. IEEE Trans. Compon. Packag. Manuf. Technol. 2019, 9, 2227–2236. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Sweep | Results | ||||||
|---|---|---|---|---|---|---|---|
| No. | … | Other Parameters (If Required) | |||||
| 0 | … | ||||||
| 1 | 0 | … | |||||
| 2 | 0 | … | |||||
| 3 | 0 | 0 | … | … | |||
| … | … | … | … | … | … | … | … |
| 0 | 0 | 0 | 0 | … | |||
| 0 | 0 | 0 | 0 | 0 | … | ||
| … | … | … | … | … | … | … | … |
| No. | |||
|---|---|---|---|
| 0 | 3.183 | ||
| 1 | 0 | 3.097 | |
| 2 | 0 | 3.090 | |
| 3 | 1.682 |
| Input | Output | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| No. | … | Other Parameters (If Required) | Voltage Grade | |||||||
| … | ||||||||||
| 0 | 0 | 0 | 0 | 0 | 0 | … | x | x | … | x |
| 1 | 0 | 0 | 0 | 0 | 1 | … | x | x | … | x |
| 2 | 0 | 0 | 0 | 1 | 0 | … | x | x | … | x |
| 3 | 0 | 0 | 0 | 1 | 1 | … | x | x | … | x |
| … | … | … | … | … | … | … | x | x | … | x |
| 1 | 1 | 1 | 1 | 0 | … | x | x | … | x | |
| 1 | 1 | 1 | 1 | 1 | … | x | x | … | x | |
| … | … | … | … | … | … | … | … | … | … | … |
| No. | (V) | MATLAB Transform | No. | |||||||
| 0 | 3.183 | 0 | 0 | 0 | 0 | 0 | 1 | |||
| 1 | 0 | 3.097 | 1 | 0 | 1 | 0 | 1 | 0 | ||
| 2 | 0 | 3.090 | 2 | 1 | 0 | 0 | 1 | 0 | ||
| 3 | 1.682 | 3 | 1 | 1 | 1 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, Z.; Du, H.; Wu, W.; Chen, K.; Tian, J.; Ji, C.; Sun, D.; Liu, Y. Shielding Grounding Optimization Method for Spaceborne Multi-Cable. Appl. Sci. 2023, 13, 3389. https://doi.org/10.3390/app13063389
Gong Z, Du H, Wu W, Chen K, Tian J, Ji C, Sun D, Liu Y. Shielding Grounding Optimization Method for Spaceborne Multi-Cable. Applied Sciences. 2023; 13(6):3389. https://doi.org/10.3390/app13063389
Chicago/Turabian StyleGong, Zhentao, Haoting Du, Wenming Wu, Kehan Chen, Jiang Tian, Chengsheng Ji, Dexin Sun, and Yinnian Liu. 2023. "Shielding Grounding Optimization Method for Spaceborne Multi-Cable" Applied Sciences 13, no. 6: 3389. https://doi.org/10.3390/app13063389