1. Introduction
In various practical fields, such as biology, chemistry, economics and engineering, it is often the case that certain quantities are potentially constrained to be non-negative. The population of a species in an ecosystem [
1], the transmission speed that a signal travels in network communication [
2], and the distribution of light energy radiated by a light source, to mention a few. This property arises from physical or biological constraints that preclude negative values; the systems that exhibit the positivity are commonly referred to as positive systems whose state variables and output trajectories take non-negative values, provided that the excitation inputs and initial states are non-negative [
3,
4,
5]. The study of positive systems can be traced back to the early 1990s when Berman [
6] introduced the concept of positive matrices and their applications to linear systems. Later, the theory of linear systems was further developed. It has become a vibrant research area in control theory and systems engineering, including modeling and analysis [
7], control and optimization [
8,
9,
10,
11], and its applications [
12]. In many cases, high-order models are frequently encountered to provide exact characterizations of dynamical behaviors, which poses a significant challenge for the analysis and synthesis of the concerned systems [
13]. Therefore, it is crucial to simplify models of dynamical systems by exploring lower-order models that approximate the original high-order ones according to certain criteria [
14,
15]. Various model reduction methods, such as balanced truncation [
16], Hankel-norm reduction [
17], and moment matching [
18] have been developed.
For a specific positive system, it is reasonably required to preserve the positivity when employing model-reduction methods. Moreover, it suffices to satisfy given approximation specifications within limited frequency ranges [
19]; it is especially relevant in engineering applications where practical constraints limit the operating frequency range. There are several model reduction approaches available to improve approximation performance over a limited frequency range, including methods such as frequency weighting [
20] and frequency-specific balanced truncation [
21]. Nevertheless, these methods cannot be directly applied to positive systems as they do not take the essential positivity of the reduced-order model into account. The generalized Kalman–Yakubovich–Popov (KYP) lemma is a powerful tool for characterizing the finite-frequency property, providing an equivalent condition for the solvability of frequency-limited specifications [
22]. In the context of model reduction, this condition is expressed in a unified manner as a bilinear matrix inequality (BMI) involving coupled terms between two dependent decision variables [
23]. To address this issue, some researchers have conservatively transformed the intractable BMI into a linear matrix inequality (LMI) by performing congruent transformation [
24]. However, a potential drawback of this method is that the obtained LMI condition may always be infeasible. By alternately fixing one of the two coupled terms, D-K synthesis has been proposed to solve the BMI problems iteratively [
25]; a major challenge of this approach lies in obtaining a feasible initial condition. Note that the introduction of additional positivity constraints and finite-frequency characterizations exacerbates the non-convexity, thereby making it difficult to explore a desired reduced-order model. Motivated by this, the paper aims to overcome this obstacle by developing a novel iterative procedure that can effectively solve the non-convex optimization problem.
In this paper, we aim to obtain a model with a lower order that preserves the positivity and captures the most significant behaviors within limited frequency intervals, which requires that the obtained model is positive and the resulting error system is stable with a given finite-frequency performance level. For this purpose, we establish conditions for the existence of such a reduced-order system in the form of BMIs. To address this problem, we propose a successive convex optimization (SCO) algorithm that iteratively solves a series of convex optimization sub-problems, each of which is an inner convex approximation of the original non-convex constraint. At each iteration, the solution to the previous step is used as a starting point for the next iteration until the convergence is reached. To summarize, this paper presents three contributions:
A finite-frequency specification is employed to characterize the approximation error, improving the model reduction capability within limited frequency intervals.
It is guaranteed that the reduced-order model maintains positivity, which retains the positive nature of the original system.
An inner convexity strategy and associated SCO algorithm are proposed to obtain a desired reduced-order model without any parametrization techniques.
This paper is organized as follows:
Section 2 introduces the problem statement and preliminary lemmas.
Section 3 provides the conditions for the existence of a reduced-order model and a sequential algorithm for optimizing it.
Section 4 gives an academic example to show the efficacy of the proposed method. Finally,
Section 5 summarizes the contributions and discusses the limitations of the study and future work.
Notations: The symbols , , and represent the set of real numbers, n-dimensional column vectors, and -dimensional matrices, respectively. The notation refers to a set of column vectors with element-wise positive entries. The symbols and denote the identical and zero matrices, respectively. For , () means that M is positive-definite (negative-definite). , where is the transpose of M. Given a matrix , we use to signify that all the elements are non-negative (positive).
2. Problem Statement and Fundamental Results
Consider a stable system (
) with a relatively high order:
where
are the state, input and output vectors, respectively, and
are the given constant matrices. The model
provides a unified description for linear systems, that is,
for the continuous-time (CT) case and
for the discrete-time (DT) case. Suppose that
is a positive system whose definition is provided as follows:
Lemma 1 ([
26]).
The system Σ
is positive if all the state and output trajectories are non-negative, that is, and , provided that and . Lemma 2 ([
19]).
For the CT case, the system Σ
is positive if, and only if, A is Metzler and , whereas, for the DT case, the system Σ
is positive if, and only if, . We intend to investigate an available model
with a smaller order
for approximating
with a sufficiently small error, where
are reduced states and approximated outputs, respectively, and
are unknown matrices. By defining
and
, the approximation error system can be expressed as
where
The transfer function of (3) is presented as:
where
denote the Laplace operator for the CT case and the
z operator for the DT case, respectively. For brevity, we give the following set to denote a positive system.
Definition 1. The reduced-order system is positive if, and only if, , where There are two concerns when developing a reduced-order model
: First, it is expected that
to preserve the positivity of
. Second, in practical applications, it suffices to evaluate the approximation performance within a finite-frequency range. To provide an exact characterization for the property, we employ a frequency-limited
specification
throughout the paper, where
gives the frequency interval of interest,
denotes the maximum singular value, and
is an index to be minimized. Therefore, we summarize the overall problem formulation as follows:
Frequency-Limited Model Reduction: Given a specific frequency range , explore a reduced-order model such that
The system is stable, and .
The approximation error system satisfies the finite-frequency criterion in (6).
Next, we introduce the generalized KYP lemma, which is essential to the analysis of finite-frequency specifications.
Lemma 3 ([
22]).
Given the state-space Equation (3) and a specific frequency range Ω,
the system has a guaranteed criterion if, and only if, there exist symmetric matrices such that and where , and Ξ
concerning different frequency ranges are listed in Table 1. Remark 1. Lemma 3 provides an exact characterization for (6), which differs from the bounded real lemma and has the potential to improve the approximation capability with less conservatism. Notice that the condition for the solvability of limited-frequency performance is expressed as a BMI condition, which is difficult to solve due to the non-convexity, and it becomes even more arduous when an extra constraint is imposed.
3. Main Results
This section presents a method to design an appropriate reduced-order model. Firstly, an equivalent characterization for the system (3) is developed to parameterize the unknown matrices . Then, the design conditions in the form of BMIs are established, ensuring that the reduced-order model maintains positivity and the error system has a given finite-frequency performance level. On this basis, we propose an iterative procedure to obtain a reduced-order model.
To simplify the problem, we denote
and
and, thus, (3) can be reformulated as
. According to Remark 1, the condition (7) cannot be directly solved for which the constrained
is coupled with
P and
Q. Therefore, we will provide feasible conditions in the following theorem.
Theorem 1. Given a specified finite frequency range Ω
and matrices , , a desired reduced-order model can be obtained if there exist matrices , such that and where Proof of Theorem 1. By Lyapunov stability theory, the asymptotic stability of the reduced-order system (2) can be ensured if, and only if, there exists a Lyapunov matrix
satisfying
and (7) can be further expressed as
Let
, and its null space denoted as
. Thus, (14) is equivalent to
By Finsler’s lemma, we have
where
. It follows that (11) and (14) can be presented in a unified form of
where
It is observed that
is coupled with
. For given feasible matrices
, we can reformulate (15) as
We notice that
is linear, whereas
is bilinear. According to [
23], the bilinear term can be further decomposed into
where
U serves as an auxiliary variable and
, without loss of generality. Defining
, and applying the above approximation strategy, results in
Similarly, we decompose
U as
, and thus
According to
, one obtains that
which is equivalent to
We observe that is convex, implying for a given . Replacing with and performing the congruent transformation on (21), we can obtain (9) and (10). □
In Theorem 1, we first establish sufficient and necessary conditions (11) and (14) for the existence of a desired model
in the form of BMIs. Given feasible solutions
satisfying
, the BMI conditions can be rewritten as the sum of linear and residual terms. By virtue of the convex-approximation strategy, we propose an SCO algorithm that iteratively solves a series of convex optimization sub-problems,
each of which is an inner convex approximation of the original non-convex constraint. At each iteration, the solution to the previous step is used as a starting point for the next iteration until the convergence is reached. To be concise, the above procedures can be summarized in the following algorithm.
Remark 2. As pointed out in Algorithm 1, it is crucial to have an admissible for optimizing the subsequent solutions. However, one can see that obtaining such an initial condition is equally as intricate as solving the original problem. It can be shown that the objective function decreases with each iteration of the SCO algorithm, and according to the convergence property, we can obtain an initial solution by simply choosing a stable model . This significantly eases the challenge of implementing the proposed algorithm.
| Algorithm 1 SCO algorithm for calculating reduced-order models |
| Require: : tolerable bound; : maximal iteration limit |
|
1: Given a feasible solution , solve the convex optimization problem |
|
|
to obtain the initial condition . Fix |
|
2: whiledo |
|
3: Solve (22) to the solution and optimum at -iteration. |
|
4: if then |
|
5: |
|
6: break; |
|
7: end if |
|
8: |
|
9: end while |
|
10: Result : the desired ; : optimal finite-frequency performance index. |
4. Simulation
In the simulation part, a system
describing the compartmental network with two sub-systems is considered, and its state-space realization is given as follows:
The example is drawn from [
19]. The restricted frequency is taken as
rad/s. To develop a reduced-order model for approximating (24), we first adopt the initial condition as
Using the initial model and applying Algorithm 1, we optimize the reduced-order model as
with the optimal
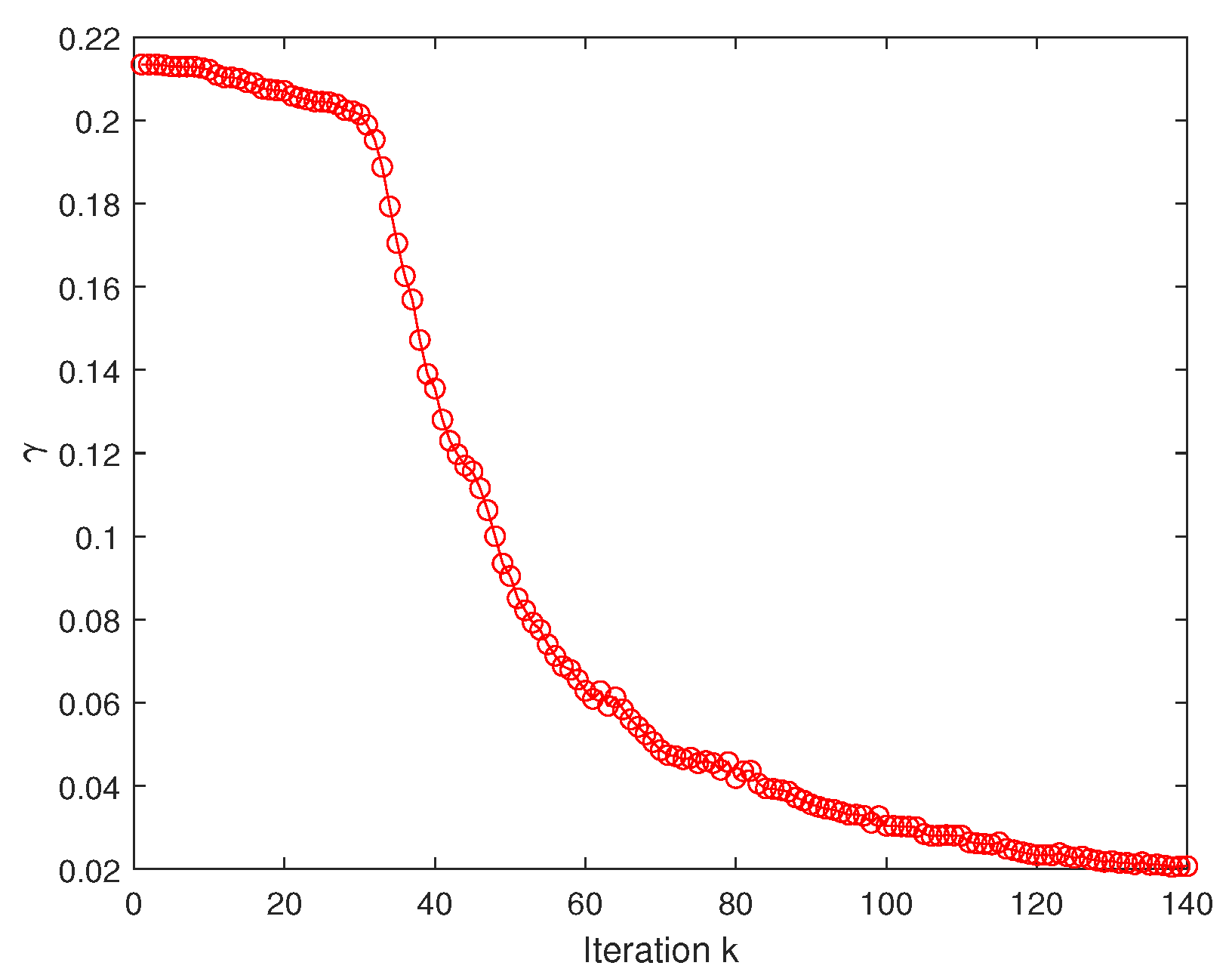
. By virtue of Lemma 2, it can be verified that the obtained reduced-order model (26) is positive. To validate the convergence property of the proposed algorithm,
Figure 1 depicts the evolution of
by configuring the maximum number of iterations
and ignoring the tolerable bound
. As shown in
Figure 1, the proposed algorithm exhibits a monotonically decreasing trend in
and converges to a fixed point eventually. Moreover, the result presents a significant improvement and provides a more exact approximation over the initial reduced-order model.
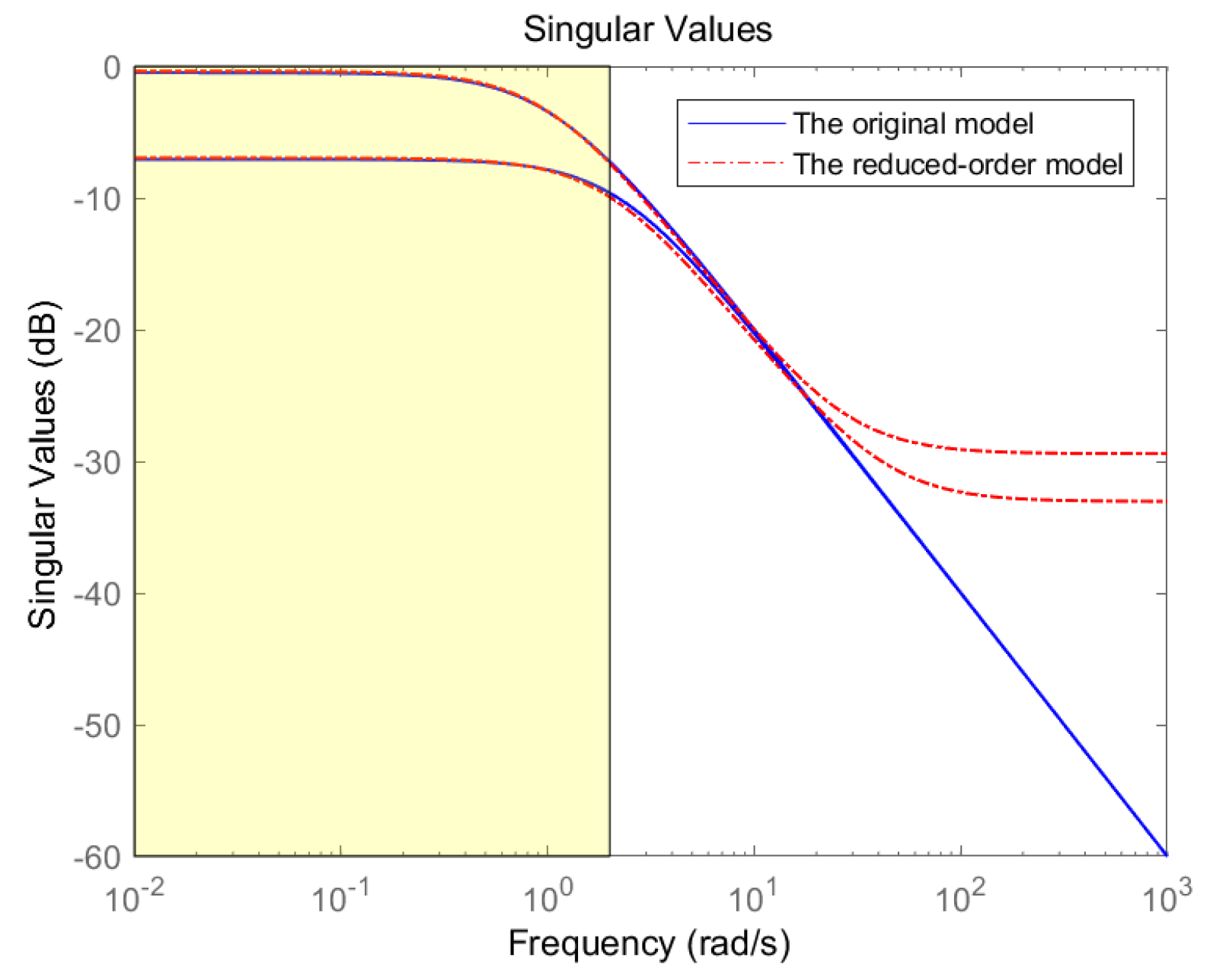
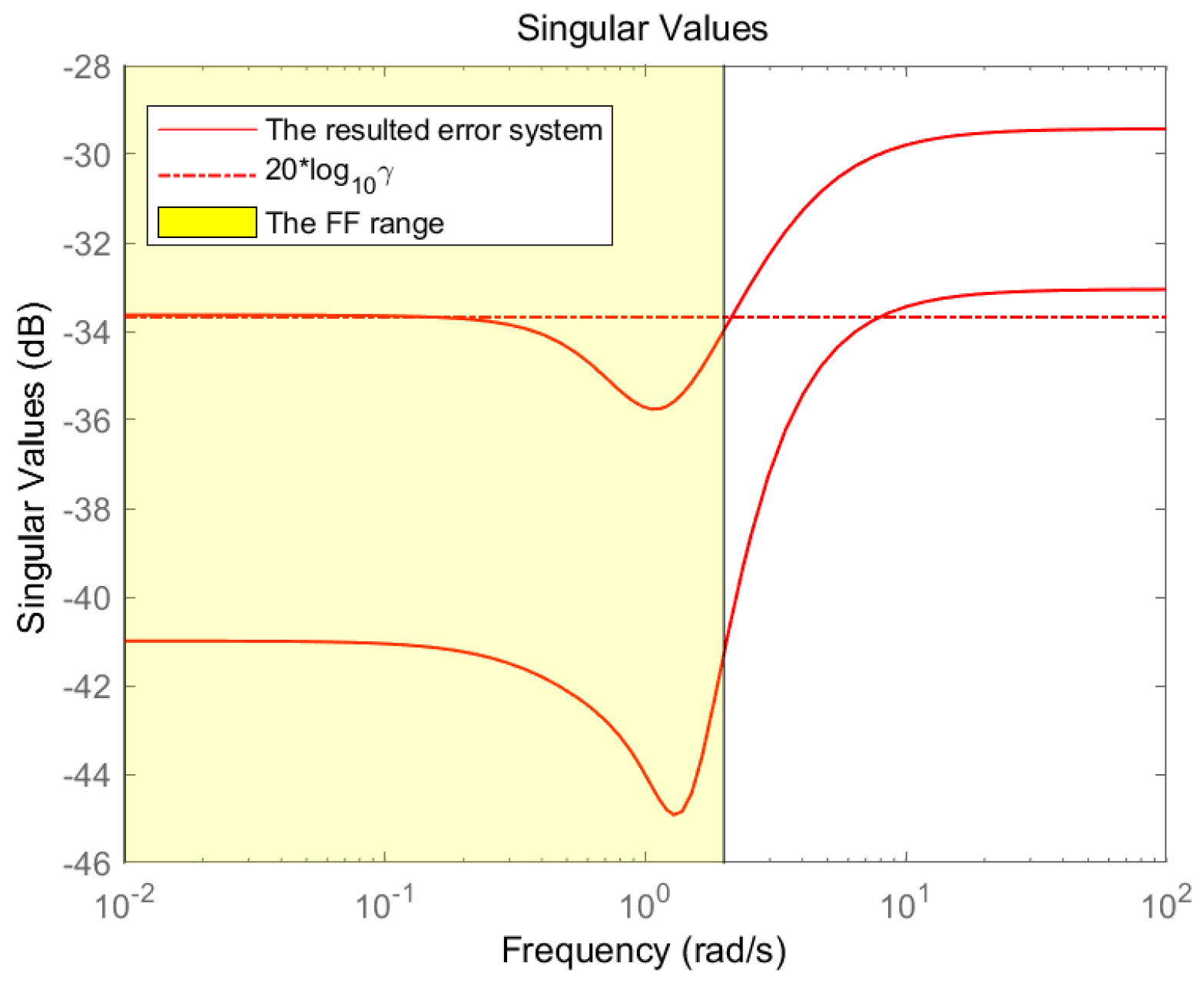
To illustrate the accuracy of (26) approximating (24), we provide
Figure 2 and
Figure 3 that demonstrate the singular value curves of
with
and
, respectively. It can be observed that, in the given frequency range (
rad/s shaded region), the singular value curves of the reduced-order system
closely match those of the original system
, while the actual maximum singular values of the error system
are strictly upper-bounded by
. Based on the above analysis, one can conclude that the proposed reduced-order model is effective in approximating a high-order system with significant small errors.






{kind=link}
{kind=link}
{kind=link}