Abstract
To satisfy the continuously high energy consumption and high computational capacity requirements for IoT applications, such as video monitoring, we integrate solar harvesting and multi-access edge computing (MEC) technologies to develop a solar-powered MEC system. Considering the stochastic nature of solar arrivals and channel conditions, we formulate a stochastic optimization problem to maximize network energy efficiency under the constraints of energy queue stability, task queue stability, peak transmission power, and maximum CPU frequency of each sensor. To solve the long-term stochastic optimization problem, we propose a Lyapunov-based online joint computational offloading and resource scheduling optimization algorithm, transforming the long-term stochastic problem into a series of deterministic subproblems in each time slot. Simulation results show that the proposed algorithm can find the optimal solution to tradeoff long-term energy efficiency and queueing backlog without requiring a priori knowledge of the channel state and energy arrival, which is a more realistic solution for practical solar-powered MEC systems.
1. Introduction
With the booming development of computation-intensive applications, such as high-definition video monitoring and face recognition, in the ubiquitous power IoT and vehicular network, intelligent terminal devices need to frequently perform communication and computation operations to provide real-time data support for system intelligence decisions, which makes the network energy consumption, communication traffic, and computation data volume explode [1,2]. This is especially the case for remote video monitoring networks of isolated microgrids and high-voltage transmission and transformation systems, where sensors are tiny, computationally weak, energy-limited, and supplied inconveniently, making it difficult to realize online remote intelligent inspection based on video image analysis, as it can neither accurately identify defects in video images nor meet a large number of real-time computing, communication, and energy requirements [3,4]. Cloud computing requires devices to upload data to the remote cloud server with strong computing capacity, increasing more load pressure, delay, and energy consumption [5]. Multi-access edge computing (MEC) transfers task processing to nearby servers at the edge of the network near the terminal side, which can offload heavy load tasks, such as image recognition, to the edge server for computing, effectively relieving the load on the cloud, shortening terminal transmission latency, reducing terminal energy consumption, ensuring the security for stored data, and meeting high computing capacity requirements for equipment fault identification and diagnosis in the remote video inspection scenario [6,7,8].
Traditional MEC research has focused on offloading decisions and resource allocation under fixed energy or constant power provision [9]. Xu et al. [10] studied task offloading strategies and resource allocation to minimize network energy consumption under the constraints of terminal energy and network QoS requirements. Heidari et al. [11] performed edge offloading based on Markov decision and deployed lightweight reinforcement learning techniques at the terminal to reduce computational complexity and energy consumption. In a wireless-powered MEC system, Feng et al. [12] committed to maximizing computational utility and minimizing grid energy consumption under the offloading delay constraint, by jointly controlling the wireless power allocation at the base station, the offloading data quantity, and power allocation at the terminals. Han et al. [13] minimized the transmit power of HAP by jointly optimizing the time allocation ratio and computational mode selection under energy causality and computation rate constraints. Considering the energy-signal duality of RF signals, the SWIPT technique can significantly improve network energy efficiency by transmitting wireless information and energy simultaneously. Chen et al. [14] achieved the minimization of total system energy consumption under data transmission rate and transmit power constraints by jointly optimizing power allocation, local computation frequency, offloading factor, and energy harvesting factor in a SWIPT-based MEC network. Alhelaly et al. [15] introduced UAV-assisted mobile edge computing to reduce the network energy consumption and extend the network lifetime while improving stability and scalability for the network coverage. Zhou et al. [16] investigated partial offloading and resource allocation in a UAV-enabled wireless-powered MEC system to maximize the computation rate under the energy and mobility constraints of the edge server. Li et al. [17] jointly optimized the offloading strategy, computational resources, and transmit power to minimize the total weighted energy consumption for the multi-UAV-assisted MEC system with NOMA. Elgendy et al. [18] further proposed an efficient task-offloading algorithm based on deep reinforcement learning to minimize the system cost by jointly optimizing task offloading, load balancing, and resource allocation. Since the energy efficiency of wireless transmission is highly dependent on the channel condition, the channel state changes dynamically in different time slots, allowing the task shunt unloading needs to accommodate the randomness of energy arrivals and data arrivals. Wang et al. [19] proposed an offline optimization-inspired sliding-window-based online partial offloading strategy to minimize the system energy consumption under the practical scenarios with random task state information (TSI) and channel state information (CSI) by jointly optimizing energy beamforming and remote task execution at the access side, and local computation and task offloading at the transmit side. Li et al. [20] proposed an online algorithm based on perturbed Lyapunov optimization by joint optimizing online partial offloading and resource allocation under time-varying fading channels, random energy arrivals, and random ON-OFF states of the main link. Acheampong et al. [21] proposed a deep neural network-based parallel computing architecture for an online task offloading and resource allocation system under the time-varying channels constraint to reduce computational latency. Mao et al. [22] propose a Lyapunov-based online optimized method to tradeoff energy efficiency and delay under random channel conditions and task arrivals. Bi et al. [23] proposed an online computational offloading algorithm based on Lyapunov optimization and deep reinforcement learning (DRL) to maximize the network data processing capacity under long-term data queue stability and average power constraints with time-varying channels and random tasks arriving in consecutive time frames. All of the above studies rely on stable energy provision from large grids and have poor network flexibility, which is not suitable for IoT applications with a large number of sensors and wide distribution in remote areas, especially remote video monitoring networks in isolated microgrids and high-voltage transmission and transformation systems.
With high density, easy deployment, and being clean and sustainable, renewable energy sources, such as solar energy can provide permanent energy to the network. Nevertheless, the research of renewable energy-powered MEC systems is challenging given the stochastic nature of environmental energy. How to efficiently utilize renewable energy and improve energy efficiency in MEC systems is the key to green communication. Yao et al. [24] established an energy transmission optimization model for solar-powered WSN. KU et al. [25] predicted the energy state for renewable energy-driven MEC systems and developed a corresponding platform. Tan et al. [26] jointly optimize the offloading strategy and power allocation to maximize the network computation for renewable energy-powered MEC systems. In hybrid renewable energy-grid-powered MEC systems, Zhao et al. [27] studied minimized multi-node energy consumption and computation under the constraint of QoS. Li et al. [28] further proposed a joint optimization algorithm for base station transmit power, terminal offload, and transmit power to minimize the total energy consumption considering both ideal and non-ideal channel state information. The above research mainly focuses on optimizing the offloading scheme at the current moment, ignoring the energy coupling between different time slots, without considering both the task delay and energy coupling constraints to obtain the optimal offloading ratio. Heidari et al. [29] used the Markov decision process (MDP) and deep learning (DL) to implement dynamic online/offline IoT edge offloading for renewable energy-powered MEC networks under the quality of service (QoS) expectation constraints. However, the computational complexity of MDP-based methods is high due to the large size of the state and action space. As Lyapunov optimization does not depend on state transfer, its computational complexity is usually much smaller than that of MDP-based methods. Guo et al. [30] considered the battery queue stability and quality of service (QoS) constraints of renewable energy-powered MEC systems and proposed a joint optimization strategy for partial offloading decision and resource allocation based on Lyapunov optimization to minimize the long-term average energy consumption and discard rate of computational tasks in the network. The study, however, fully deploys renewable energy harvesting devices in sensing terminals, which are not friendly to HD video monitoring terminals with small scale in remote and harsh environments, such as substations and transmission lines.
Based on the above analysis, we investigate the solar-powered MEC system with the partial offloading scenario, where the hybrid access point (HAP) with a built-in MEC server wirelessly charges and handles the offloading task for its sensor by using the “harvest-store-use” protocol. Each sensor uses the harvested energy from RF signals to complete local computing and remote offloading. Considering the stochastic nature of solar arrival and channel state, we construct a model for maximizing network long-term energy efficiency under energy/task queue stability, transmit power, and local computation frequency constraints, and propose a joint optimization algorithm for online computation offloading and resource allocation based on Lyapunov optimization, which balancing the long-term energy efficiency and queue backlog for the network by optimizing the terminal calculation frequency, solar energy broadcast power, and time allocation. In this paper, the innovation points and specific work are as follows:
- (1)
- We integrate solar power provision and multi-access edge computing to formulate a multi-terminal MEC framework for partial offloading with solar energy to provide a continuous energy provision to the terminal nodes, adapting to the high energy consumption and high computation requirements for remote video monitoring networks in remote areas, such as isolated microgrids and high-voltage transmission and distribution systems.
- (2)
- We define a long-term offloading energy efficiency function to measure the benefits of solar-powered offloading by considering the long-term offloading computations and long-term energy provision. Considering the stochastic nature of the solar energy arrival and channel state, we developed a long-term stochastic optimization problem to maximize network energy efficiency under the constraints of energy queue stability, task queue stability, peak transmission power, and maximum CPU cycle frequency for each user.
- (3)
- We propose a Lyapunov-based online computational offloading and resource allocation algorithm to find the optimal solution to the long-term energy efficiency and queueing backlog problems, which does not require a priori knowledge of the channel state and energy arrival and therefore is a more realistic solution for practical solar-powered MEC systems.
The rest of the paper is organized as follows. Section 2 introduces the system model and assumption. Section 3 formulates a long-term stochastic optimization problem to maximize network energy efficiency for multi-terminal solar-powered MEC wireless sensing networks. Section 4 presents the details of Lyapunov theory-based online computational offloading and resource allocation joint optimization algorithm for the non-convex problem mentioned above. Section 5 evaluates the simulation results and Section 6 concludes the paper.
2. System Model and Assumption
We consider a multiple terminal partial offload MEC network with solar power, as shown in Figure 1, where the hybrid access point HAP is equipped with a high computational power MEC server and a solar energy harvesting device with battery capacity to perform wireless charging and offloading computations for the sensor node set covered by it. Assuming that the solar energy arrivals follow M-Markov Model [31], we investigate the independent task model where the task arrivals at a single sensor node and between different sensor nodes are independent of each other, and define the data arrivals at sensor node k in the time slot t to satisfy a Bernoulli distribution as . The member nodes use RF energy harvesting techniques to harvest energy and offload part of the computationally intensive tasks, with some of the tasks performed locally and the remaining tasks offloaded to a remote MEC server. Due to the small amount of data in the calculation results, we ignore the calculation result return latency and energy consumption in this paper. To avoid data link interference between multiple nodes, the system uses the TDMA protocol to offload tasks to the HAP, defining the offload time of each node as , and considering that the system needs to complete the computation task within a given time period T, the node offload time needs to satisfy . Assume that the data transmission link follows quasi-static fading and that the up and down transmission links are reciprocal and simultaneous through the orthogonal spectrum with the channel gain following a Rayleigh distribution [32].
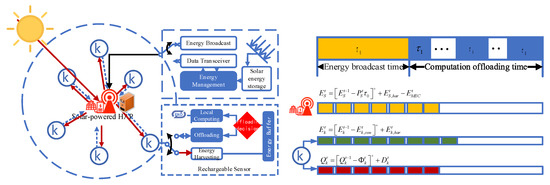
Figure 1.
The overview of solar-powered WSN based on hybrid multi-access. The SC consistently harvests and stores solar energy for charging a set of battery-free sensor nodes. The node does local computing and remote offloading based on the harvested energy.
In a solar powered MEC system, the initial available energy of the HAP at time slot is assumed. The HAP harvests then stores solar energy throughout the time and broadcasts energy to the member nodes by wireless power transmission (WPT). The MEC server is used at the end of the time slot to compute and process the offloading data. Defining as the available energy at the end of time slot t, the energy buffer queue of the HAP can be expressed by
where . denotes the MEC server energy consumption, which can be calculated by . denotes the power consumption parameter, which depends on the chip architecture [33]. The frequency of the MEC server is fixed and characterizes the CPU service capability. To avoid energy leakages, HAP energy available at the end of the battery needs to satisfy . For simplicity, we consider a linear energy harvesting model where the energy harvested by the node in the time slot can be expressed as
where denotes the energy harvesting efficiency. Each sensor node performs data processing using the harvested energy, part of which is used for local computation and part of which is offloaded to the MEC server in the HAP. The CPU frequency of a node k in the network in the time slot t is defined as , which characterizes the computational capacity of the node and can be dynamically tuned by adjusting the chip voltage and frequency scaling techniques [34]. denotes the number of CPU cycles required to complete a task per unit of data size. The total computation of a node k in time frame T and its total energy consumption can be expressed by Equations (3) and (4) respectively.
where denotes the power consumption parameter of node k. Assume that the initially available energy of the node k in the time slot t is , and the energy buffer queue of the sensor node can be represented by
Therefore, the sensor node data buffer queue can be represented as
The HAP receives the offload data from all member nodes for computing and processing and back to the MEC server. The total computation and computation energy consumption of the MEC server during the time period T can be calculated by Equations (7) and (8).
Consequently, the total computation and total energy consumption of the network can be expressed by Equations (9) and (10), respectively.
3. Problem Formulation
Considering the constraints of long-term power consumption, instantaneous power consumption, and time constraints of the network under renewable energy access, we optimize the long-term energy efficiency of the network. The long-term network energy efficiency EE is defined as the ratio of the total long-term network computation to the total long-term energy consumption, i.e.,
where and denote the limits on the time-averaged expectation of the total network computation and total energy, respectively. From Equations (1), (5) and (6), we know that the HAP and each sensor node have a strong energy/data causal constraint, i.e., the offloading result for the current time frame of the node will affect the available energy of the HAP/node in the next time frame through the computational energy consumption, which affects its offloading decision. For example, assuming that current time frame t has an initial available energy and computational offload energy consumption , the initial available energy of the next time slot approaches 0, making the next time frame unable to complete the computational offload task. It can be seen that the offloading decision becomes more complicated due to the existence of energy causal constraints and strong coupling between different time frames. To obtain the optimal long-term network offloading energy efficiency, we convert the energy causal constraints in Equations (1), (5) and (6) into the following C7–C9 queue stability constraints. We consider the maximization of network energy efficiency under solar energy constraints to optimize sensor node partial task offloading strategies and network resource allocation. The problem is described as shown in P1.
where , in which denotes the time slot allocation policy; denotes the energy broadcast transmission policy. Constraints C1 and C2 are time constraints. Constraints C3 and C4 limit the maximum transmit power of the node and HAP, respectively. Constraint C5 denotes the CPU computation frequency constraints of the node. Constraint C7 denotes the long-term energy consumption constraints of the HAP, which is the key to guaranteeing the stability of the HAP energy buffer queue and also constrains the available energy of the HAP at any moment not to exceed the maximum storage limit of the battery. Constraints C8–C9 are prerequisites for ensuring the stability of the node energy buffer queue and the data buffer queue. Clearly, problem P1 is a non-convex fractional programming problem with a strong coupling between the optimization variables and the objective function, making it hard to solve directly.
4. Lyapunov-Based Joint Online Optimization Algorithm for Partial Task Offloading Decisions and Resource Allocation
Since problem P1 is a non-convex fractional programming problem, it is hard to tackle directly. We first transform problem P1 into an integer form using Dinkelbach’s theorem [35], as shown in problem P2.
As problem P2 has long-term average optimization included in both the objective function and constraints, it is difficult to solve by traditional optimization methods. In this paper, we use Lyapunov optimization theory [36] to solve the problem. Compared with the MDP method, Lyapunov optimization does not depend on state transfer, has lower computational complexity, which can achieve an optimized system performance objective while stabilizing the network queue, and is an effective framework for designing online control algorithms highly adaptive to problem P2. Meanwhile, since the Lyapunov function is a non-negative scalar measure for the multidimensional state of the system, the Lyapunov optimization ensures the stability of the system in different forms mainly by controlling the drift of this function to the non-zero direction. The Lyapunov drift is crucial to the study of optimal control in queuing networks, which can be widely used in network optimization involving scheduling, allocation, and other fairness problems.
4.1. Problem Reformulation Based on Lyapunov Optimization Theory
Considering the energy queue stability constraint of the solar-powered HAP, the energy and data queue stability constraint of each node, we define to be the cascade vector, where and . It is known from Equations (1), (5) and (6) that the queue backlog length can be stabilized by optimizing the queue input and output quantities to satisfy constraints C7–C9 in problem P1. We use a quadratic Lyapunov function to characterize the scalar of the queue backlog and define it as Equation (14).
Next, Lyapunov drift is used to characterize the variation of the queue backlog for different time slots, which can be expressed by Equation (15).
where can be expressed by Equation (16).
Since the out and in of energy and data volumes in each queue are bounded, there exists a finite constant C so that the following property holds for all time and for all queues:
Then, the conditional expectation of Lyapunov drift satisfies Equation (18).
To achieve system long-term average energy efficiency while stabilizing the network queue, we introduce adjustable weights V to balance queue stability and network energy efficiency, and construct the drift-minus-utility (DMU) function as shown in Equation (19)
The upper bound is derived from Theorem 1 when considering the relevance of power control, computational capacity management, and time scheduling.
Theorem 1.
The upper bound on the drift minus utility DMU function is bounded by the following equation.
Proof.
For any non-negative real number, the scaling rules of sum can be applied to find the energy of all nodes and HAPs as in Equations (21)–(23), respectively.
Combining Equations (21)–(23) and applying the law of scaling sums and the law of iterated expectations yields
where C is an upper bound of which satisfies
Further, the drift minus utility DMU function is obtained to satisfy
□
Based on Equation (20) and in accordance with the principle of opportunistic minimization of expectations [35], we convert the long-term optimization problem P1 in this section into an online single time slot optimization problem by using the Lyapunov optimization method. If the single time slot optimization problem is solved optimally on each time slot, the optimal solution to the original problem can be achieved successively, and the original problem P1 can be converted into
4.2. Local Computing Resource Optimisation
For a fixed transmission energy and time allocation, the optimal local CPU frequency for node k can be derived by solving the subproblem P(2.1), as shown in Equation (28). P(2.1).
Since the objective of problem P(2.1) is convex and its constraints are linear, its optimal solution can be obtained at the boundary or stationary points of the objective function, and the optimal local CPU frequency can be calculated from Equations (5)–(26).
4.3. Joint Optimisation of Power Control and Time Allocation
Based on the optimal local CPU frequency, we solve problem P(2.2) to obtain the optimal transmission power and time allocation.
Since the transmit power is strongly coupled to time, problem P(2.2) is non-convex and hard to solve. We introduce an auxiliary set of variables in this section, which converts problem P(2.2) into problem P(2.3).
By calculating second-order derivatives, the problem can be shown to be a convex optimization problem, which can be solved by the interior-point method or the Lagrange method. The local CPU frequency scheduling subproblem P(2.1) and the transmission power control and time allocation subproblem P(2.3) are alternatively iteratively optimized to converge to a globally optimal solution at a sublinear convergence rate.
In summary, the algorithm for the joint optimization of computational offloading and resource allocation in this paper is shown in Algorithm 1.
| Algorithm 1: Lyapunov-based Joint Online Optimization Algorithm for Partial Task Offloading Decisions and Resource Allocation(LyOTR) | ||
| Input: | K,N,T,G, | |
| Output: | Optimal network energy efficiency and optimal resource allocation schemes | |
| 1 | Initialize g = 0, ,,,, T = 200 | |
| 2 | while and do | |
| 3 | Calculate the optimal CPU frequency by Equation (29); | |
| 4 | Solving the subproblem P(2.3) by the interior point method yields the optimal transmitting energy and time allocation variables for the sensor nodes. | |
| 5 | Verification of energy efficiency convergence according to Equation (12). | |
| 6 | Update the initial energy queue & initial task queue & energy efficiency of the current time slot according to Equations (1), (5) and (6), respectively. | |
| 7 | g = g + 1. | |
| Calculate ; | ||
| 8 | End while | |
5. Performance Analysis of Algorithms
In this paper, we use Lyapunov optimization to convert a long-term optimization problem into an online single-time slot optimization problem and subsequently obtain a near-optimal solution to the original problem by solving the single-time slot optimization problem optimally at each time slot. This section analyses the gap between the optimal energy efficiency obtained by the proposed online algorithm and the optimal value of the original problem, together with revealing that the queueing backlog and network utility follow the trade-off of as shown in Theorem 2.
Theorem 2.
The optimal network utility and the average queue backlog satisfy the following equation.
Equation (32) indicates that the time-averaged network energy efficiency increases at the rate of , and Equation (33) indicates that the time-averaged energy queue backlog increases at the rate of . When V is large enough, the algorithm energy efficiency approaches the optimal energy efficiency, and the queue backlog is at its worst thereafter. Thus, the network energy queue backlog and network utility follow a trade-off of .
Proof.
where represents the network maximum energy consumption. At time period B, we use iterative expectation and scaling summation to obtain
First, we assume that the mathematical expectation of the new energy provision MEC system satisfies the following constraint before proving Theorem 2
After a certain number of iterations of Algorithm 1, the system will stabilize and there will exist arbitrarily small positive real numbers such that the following equation holds
where , , , , , , and indicate the optimal solutions derived under arbitrary decisions, respectively. Substituting Equation (35) into Equation (20), we obtain Equation (36).
We divide by both sides of Equation (37) simultaneously to obtain
When , , we appropriately ignore the non-negative terms and the formula can be transformed as
Then, the network energy efficiency can be expressed as
Similarly, dividing both sides of the equation by A simultaneously, the network queue stability can be expressed as
□
6. Results and Discussion
6.1. Simulation Setup
In this section, we evaluate the system performance via numerical simulations based on the Monte Carlo method. All nodes are randomly distributed in the sensing area for 100 times and the corresponding maximum long-term energy efficiency is calculated, which are probabilistically distributed by interval, and the number with the highest EE value from the highest probability interval is selected as the optimal network EE, and the corresponding offloading calculation decision and resource scheduling scheme is the best. We consider a coverage area of for a solar-powered MEC system, which includes a solar-powered access point with MEC server (HAP) and [4,8,12,16,20] sensor nodes with random distribution. The HAP was equipped with a 1 m × 1 m solar panel with 10 kJ energy storage batteries, where energy harvesting efficiency is 20%. Solar energy arrivals follow the hidden Markov model [31] with three states, which represent different weather states and satisfy different Gaussian distributions, such as sunny (94.6, 0.31), cloudy (76.0, 1.55), rainy (45.6, 1.48). The maximum transmit power is set to 5 W. All nodes recharge themselves with energy efficiency 0.51. The computational efficiency parameter is set to 109, the local CPU frequency of each node is set to [0.2 GHz, 2 GHz], and the CPU frequency of the MEC server is set to 4 GHz. The channel gain follows the Rayleigh fading model, where the path loss factor is 3 Hz. The system bandwidth is set to [200–600 kHz] and noise spectral density is set as –174 dB/Hz. We initialize the energy and data queue length to 0, i.e., , , .
To verify the performance of the proposed Lyapunov-based joint online optimization algorithm for partial task offloading decisions and resource allocation (“Proposed”), we consider four representative methods as the benchmarks in terms of queue stability, system energy efficiency, and related parameters, all of which use the same energy availability constraints as “Proposed”. is computed similarly to “Proposed” by using Equation (29), while determining and via following strategies:
- “All local” represent sensor perform all computational tasks locally based on the whole harvested solar energy. In this case, the optimal energy broadcast power is obtained by solving (12) with ,.
- “All MEC” represent sensor offloads all tasks to HAP for edge processing. In this case, the optimal transmit power is obtained by solving (12) with .
- “Fixed broadcast power” is referenced from the literature [22], which has a similar energy harvesting and offloading mechanism as this paper, where sensing nodes perform local computing or remote offloading for maximizing the long-term energy efficiency based on the harvested RF energy. The difference is that the HAP has a constant and stable energy provision and the energy broadcast power is constant and takes a maximum value .
- “Fixed energy allocation”: indicates that the node uses the collected energy proportionally for local computing and remote offloading. For simplicity, we set the scaling factor is 0.5.
6.2. Performance for Network
Figure 2 shows the stability of the energy queue and data queue of node k, and the solar powered HAP energy queue and network average energy efficiency queue EE, respectively. The HAP energy queue fluctuates steadily around the harvested green energy over time within a controlled range, which effectively ensures the robustness of the energy queue backlog, because if the broadcast and computational energy consumption of HAP in a time slot is much smaller than the harvested green energy, the excess energy is stored in the next time slot, resulting in a queue backlog. The stability of the energy queue , data queue , and average energy efficiency queue EE is mainly controlled by the HAP energy queue , which remains stable within a controlled range and can make the rest of the queues gradually stabilize.
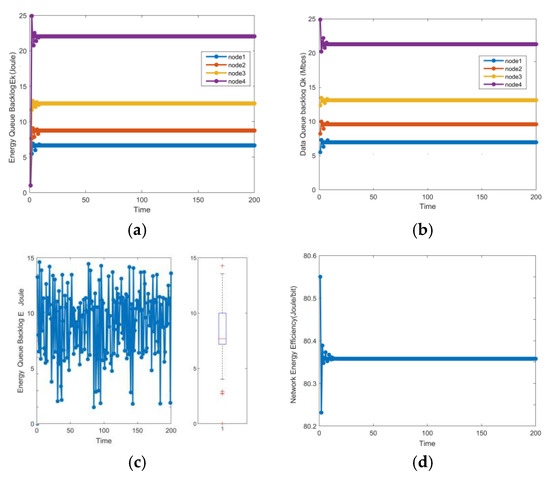
Figure 2.
Analysis of queue stability (a) energy queue of node k (b) data queue of node k (c) energy queue of HAP (d) network average energy efficiency queue.
Figure 3 compares the network energy efficiency of “Proposed” with All MEC, All local, Fixed broadcast power, and Fixed energy allocation. As the number of sensors increases, the energy efficiency of all algorithms except All local shows a trend of increasing then decreasing, while the proposed has significantly better energy efficiency than others. This is because as more sensors are accessed, the energy broadcasted by HAP is received and utilized on a larger scale, which reduces the environmental loss. However, as the number of sensors continues to increase, the network computation increases, and the time slot resources required for multi-node offloading increases, which seriously compresses the HAP energy broadcast time. Here, due to the high independence of each node in the local computing mode, All local has no offloading time slot resource occupation, and its energy efficiency shows a continuous slowly increasing trend with the increase of the network scale. In contrast, All MEC offloads all tasks to the MEC server, resulting in a sudden drop in computation volume in the offload mode as the number of terminal nodes increases and exceeds a threshold value. Fixed broadcast power with constant transmit power, when the energy broadcast time decreases, results in lower total energy broadcast in the HAP period, a large amount of solar energy backlog, and less energy harvesting by nodes, which reduces a large amount of computational data backlog and reduces network computation, seriously affecting network energy efficiency. Fixed energy allocation is a fixed-ratio energy allocation algorithm that is not flexible enough to cope with the changes in solar energy and data arrival and its energy efficiency is low. The proposed algorithm can adjust the transmit power in time according to the solar-harvested and the computation to tradeoff the network energy efficiency and reduce the network average queue backlog.
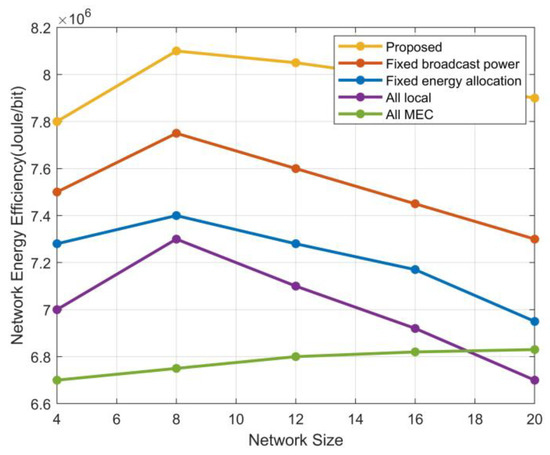
Figure 3.
The performance of energy efficiency under different algorithms with network size.
Figure 4 analyses the effect of the total network bandwidth on the network energy efficiency for different algorithms. Clearly, the network energy efficiency increases as the total bandwidth increases. This is because a larger bandwidth means lower energy consumption required for offloading tasks, which enhances the network energy efficiency. The comparative analysis in Figure 4 shows that the larger the part of the network that is used for remote offloading decisions, the more the average network energy efficiency increases with bandwidth, but as the bandwidth continues to increase, the network energy efficiency tends to stabilize, which is because network energy becomes critical to limiting network performance in the latter stages.
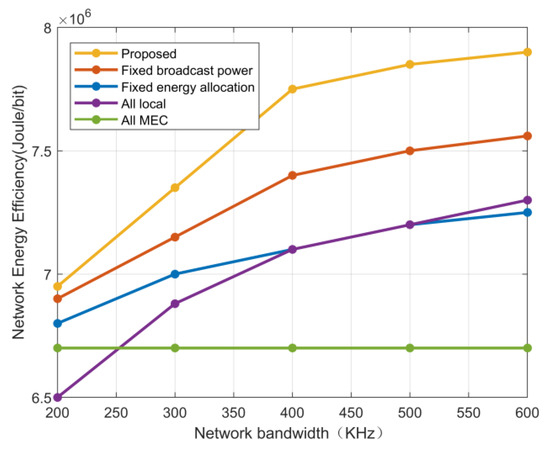
Figure 4.
The performance of energy efficiency under different algorithms with network bandwidth.
Figure 5 analyses the effect of the control parameter V on the network average energy efficiency. As the parameter V increases, the network average energy efficiency first increases rapidly and then gradually converges to the optimal value. This trend confirms Theorem 2 that network energy efficiency increases at the rate of . This is because the network needs to consume more energy to keep the queue stable. Meanwhile, when the computation tasks are fixed, the network energy efficiency is highest on sunny days and lowest on cloudy days, because the HAP harvests more energy on sunny days and the network can process more data to improve the network computation. This is because HAP harvests more energy on sunny days and can process more data to increase network computation, while cloudy weather is less conducive to energy harvesting, and the volatility of solar energy harvesting in different time slots of the HAP is greater due to cloud cover, so the network needs to consume more energy to keep the queue stable, and therefore its network energy efficiency is lower than that of cloudy weather.
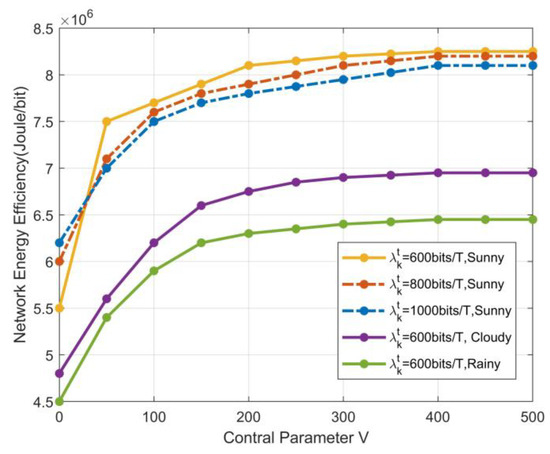
Figure 5.
System energy efficiency vs. control parameter V.
Figure 6 illustrates the effect of the control parameter V on the network queue backlog. The average queue length increases with the value of the control parameter V, verifying that the time-averaged energy queue backlog increases at the rate of as stated in Theorem 2. It is clear from Figure 6 that under certain conditions of available energy, as the computing task increases, the energy required for local computing or remote offloading at terminals is insufficient, and tasks that cannot be processed in time will be buffered in the data queue, increasing the network queue backlog. When the network computing task is certain, the queue backlog is the largest in cloudy weather, which is because the volatility of solar harvesting by HAP in different time slots is larger in cloudy weather, which requires HAP to consume more energy to guarantee the queue stability, and it is difficult to compute and process the terminal data in time, causing the network queue backlog to increase.
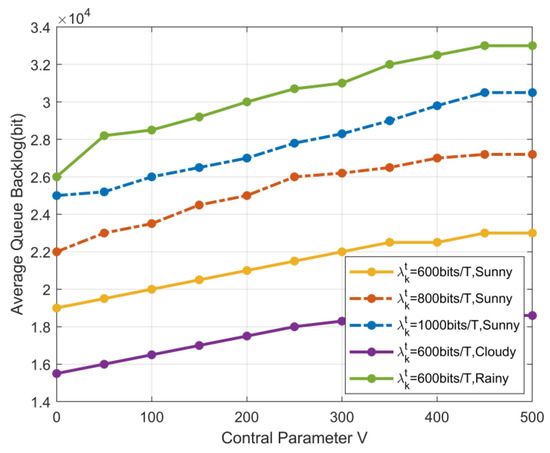
Figure 6.
Queue backlog vs. control parameters V.
7. Conclusions
This paper investigates the optimal partial offloading decision and resource allocation problem for solar-powered MEC networks. Considering the randomness of solar arrival, channel state information, and task data arrival, we construct a stochastic optimization model for partial task offloading decisions and resource allocation with respect to maximizing network long-term energy efficiency. We then propose a joint computational offloading and resource allocation algorithm based on Lyapunov optimization to achieve long-term energy efficiency maximized under unknown prior knowledge of energy arrival, channel conditions, and task arrival. Simulations verify that the network energy efficiency and average queue backlog in the proposed algorithm follow the tradeoff of . Further, the impact of network size and bandwidth on system energy efficiency is demonstrated. In practice, given the nonlinear characteristics of renewable energy harvest and the obvious distribution characteristics of different types of energy, it is more practical to study the hybrid energy provision MEC system under nonlinear conversion. Meanwhile, HAP broadcasts power can be extended by using MIMO technology to reduce interference and improve energy utilization. Moreover, together with the improvement of network intelligence, the deployment of IoT terminals gradually becomes intensive, and the massive terminal access not only puts forward higher requirements on network energy and computation offload, but also results in serious spectrum resource shortages, which makes it valuable to study the renewable energy provision MEC system based on NOMA protocols instead of TDMA.
Author Contributions
Conceptualization, J.G. and R.W.; methodology, J.G. and J.H.; validation, J.G.; formal analysis, R.W.; writing—original draft preparation, J.G. and R.W.; writing—review and editing, J.G., R.W. and J.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by National Key Research and Development Program (No. 2022YFB2402900).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Liu, F.; Cao, Y.J.; Zhang, G.A. Collaborative Resource Allocation Strategies for Mobile Edge Computing in vehicular networks. Telecommun. Eng. 2021, 61, 858–864. [Google Scholar]
- Jiang, X.; Yu, F.R.; Song, T.; Leung, V.C. A survey on multi-access edge computing applied to video streaming: Some research issues and challenges. IEEE Commun. Surv. Tutor. 2021, 23, 871–903. [Google Scholar] [CrossRef]
- Grasso, C.; Schembra, G. A fleet of MEC UAVs to extend a 5G network slice for video monitoring with low-latency constraints. J. Sens. Actuator Netw. 2019, 8, 3. [Google Scholar] [CrossRef]
- Amutha, J.; Sharma, S.; Nagar, J. WSN strategies based on sensors, deployment, sensing models, coverage and energy efficiency: Review, approaches and open issues. Wirel. Pers. Commun. 2020, 111, 1089–1115. [Google Scholar] [CrossRef]
- Luo, J.; Yin, L.; Hu, J.; Wang, C.; Liu, X.; Fan, X.; Luo, H. Container-based fog computing architecture and energy-balancing scheduling algorithm for energy IoT. Future Gener. Comput. Syst. 2019, 97, 50–60. [Google Scholar] [CrossRef]
- Cecchinato, D.; Berno, M.; Esposito, F.; Rossi, M. Allocation of computing tasks in distributed MEC servers co-powered by renewable sources and the power grid. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 8971–8975. [Google Scholar]
- Li, Y.; Li, C.; Wu, G.; Zhang, C. Research on high-precision time distribution mechanism of multi-source power grid based on MEC. In Proceedings of the 2019 IEEE International Conference on Communications, Control, and Computing Technologies for Smart Grids (SmartGridComm), Beijing, China, 21–23 October 2019; pp. 1–5. [Google Scholar]
- Jia, S.; Hao, W.; Gao, Z.; Yang, S. Resource Allocation and Task Offloading Strategies in Mobile Edge Computing Systems for Task Migration. Telecommun. Eng. 2022, 62, 1037–1043. [Google Scholar]
- Jiang, C.; Fan, T.; Gao, H.; Shi, W.; Liu, L.; Cérin, C.; Wan, J. Energy aware edge computing: A survey. Comput. Commun. 2020, 151, 556–580. [Google Scholar] [CrossRef]
- Xu, C.; Zheng, G.; Zhao, X. Energy-minimization task offloading and resource allocation for mobile edge computing in NOMA heterogeneous networks. IEEE Trans. Veh. Technol. 2020, 69, 16001–16016. [Google Scholar] [CrossRef]
- Heidari, A.; Jamali, M.A.J.; Navimipour, N.J.; Akbarpour, S. A QoS-Aware Technique for Computation Offloading in IoT-Edge Platforms Using a Convolutional Neural Network and Markov Decision Process. IT Prof. 2023, 25, 24–39. [Google Scholar] [CrossRef]
- Feng, J.; Pei, Q.; Yu, F.R.; Chu, X.; Shang, B. Computation Offloading and Resource Allocation for Wireless Powered Mobile Edge Computing With Latency Constraint. IEEE Wirel. Commun. Lett. 2019, 8, 1320–1323. [Google Scholar] [CrossRef]
- Li, H.; Xiong, K.; Lu, Y.; Gao, B.; Fan, P.; Letaief, K.B. Distributed Design of Wireless Powered Fog Computing Networks With Binary Computation Offloading. IEEE Trans. Mob. Comput. 2023, 22, 2084–2099. [Google Scholar] [CrossRef]
- Chen, F.; Wang, A.; Zhang, Y.; Ni, Z.; Hua, J. Energy Efficient SWIPT Based Mobile Edge Computing Framework for WSN-Assisted IoT. Sensors 2021, 21, 4798. [Google Scholar] [CrossRef]
- Alhelaly, S.; Muthanna, A.; Elgendy, I.A. Optimizing Task Offloading Energy in Multi-User Multi-UAV-Enabled Mobile Edge-Cloud Computing Systems. Appl. Sci. 2022, 12, 6566. [Google Scholar] [CrossRef]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation Rate Maximization in UAV-Enabled Wireless-Powered Mobile-Edge Computing Systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef]
- Li, H.; Diao, X.; Zhang, Z.; Shang, Z.; Yang, L. Resource Allocation in Multi-UAV-Enabled MEC System for NOMA-IoT. Telecommun. Eng. 2022, 62, 553–561. [Google Scholar]
- Elgendy, I.A.; Meshoul, S.; Hammad, M. Joint Task Offloading, Resource Allocation, and Load-Balancing Optimization in Multi-UAV-Aided MEC Systems. Appl. Sci. 2023, 13, 2625. [Google Scholar] [CrossRef]
- Wang, F.; Xing, H.; Xu, J. Real-Time Resource Allocation for Wireless Powered Multiuser Mobile Edge Computing With Energy and Task Causality. IEEE Trans. Commun. 2020, 68, 7140–7155. [Google Scholar] [CrossRef]
- Li, X.; Bi, S.; Quan, Z.; Wang, H. Online Cognitive Data Sensing and Processing Optimization in Energy-Harvesting Edge Computing Systems. IEEE Trans. Wirel. Commun. 2022, 21, 6611–6626. [Google Scholar] [CrossRef]
- Acheampong, A.; Zhang, Y.; Xu, X. A parallel computing based model for online binary computation offloading in mobile edge computing. Comput. Commun. 2023, 203, 248–261. [Google Scholar] [CrossRef]
- Mao, S.; Leng, S.; Maharjan, S.; Zhang, Y. Energy Efficiency and Delay Tradeoff for Wireless Powered Mobile-Edge Computing Systems with Multi-Access Schemes. IEEE Trans. Wirel. Commun. 2020, 19, 1855–1867. [Google Scholar] [CrossRef]
- Bi, S.; Huang, L.; Wang, H.; Zhang, Y.A. Lyapunov-Guided Deep Reinforcement Learning for Stable Online Computation Offloading in Mobile-Edge Computing Networks. IEEE Trans. Wirel. Commun. 2021, 20, 7519–7537. [Google Scholar] [CrossRef]
- Yao, H.; Yao, Y. Transmission Power Strategy Optimization of Solar Wireless Sensor Network Node. Telecommun. Eng. 2018, 58, 997–1004. [Google Scholar]
- Ku, Y.; Sapra, S.; Baidya, S.; Dey, S. State of energy prediction in renewable energy-driven mobile edge computing using CNN-LSTM networks. In Proceedings of the 2020 IEEE Green Energy and Smart Systems Conference (IGESSC), Long Beach, CA, USA, 2–3 November 2020; pp. 1–7. [Google Scholar]
- Tan, J.R.; Xu, D.M.; Guan, W.B. Resource Allocation in Fog Radio Access networks Based on Renewable Energy Cooperation. Telecommun. Eng. 2021, 61, 1331–1338. [Google Scholar]
- Zhao, F.; Chen, Y.; Zhang, Y.; Liu, Z.; Chen, X. Dynamic offloading and resource scheduling for mobile-edge computing with energy harvesting devices. IEEE Trans. Netw. Serv. Manag. 2021, 18, 2154–2165. [Google Scholar] [CrossRef]
- Li, N.; Hao, W.; Zhou, F.; Zeng, M.; Yang, S. Smart Grid Enabled Computation Offloading and Resource Allocation for SWIPT-Based MEC System. IEEE Trans. Circuits Syst. II Express Briefs 2022, 69, 3610–3614. [Google Scholar] [CrossRef]
- Heidari, A.; Navimipour, N.J.; Jamali, M.A.J.; Akbarpour, S. A green, secure, and deep intelligent method for dynamic IoT-edge-cloud offloading scenarios. Sustain. Comput. Inform. Syst. 2023, 38, 100859. [Google Scholar] [CrossRef]
- Guo, M.; Wang, W.; Huang, X.; Chen, Y.; Zhang, L.; Chen, L. Lyapunov-Based Partial Computation Offloading for Multiple Mobile Devices Enabled by Harvested Energy in MEC. IEEE Internet Things J. 2022, 9, 9025–9035. [Google Scholar] [CrossRef]
- He, T.; Chin, K.; Soh, S.; Yang, C.; Wen, J. On Maximizing Min Source Rate in Power Beacon Assisted IoTs Networks. IEEE Trans. Veh. Technol. 2020, 69, 11880–11892. [Google Scholar] [CrossRef]
- Ku, M.; Chen, Y.; Liu, K.R. Data-driven stochastic models and policies for energy harvesting sensor communications. IEEE J. Sel. Areas Comm. 2015, 33, 1505–1520. [Google Scholar] [CrossRef]
- Zhang, W.; Wen, Y.; Guan, K.; Kilper, D.; Luo, H.; Wu, D.O. Energy-optimal mobile cloud computing under stochastic wireless channel. IEEE Trans. Wirel. Commun. 2013, 12, 4569–4581. [Google Scholar] [CrossRef]
- Wang, Y.; Sheng, M.; Wang, X.; Wang, L.; Li, J. Mobile-edge computing: Partial computation offloading using dynamic voltage scaling. IEEE Trans. Commun. 2016, 64, 4268–4282. [Google Scholar] [CrossRef]
- Li, Y.; Sheng, M.; Shi, Y.; Ma, X.; Jiao, W. Energy Efficiency and Delay Tradeoff for Time-Varying and Interference-Free Wireless Networks. Wirel. Commun. IEEE Trans. 2014, 13, 5921–5931. [Google Scholar] [CrossRef]
- Li, Y.; Xia, S.; Zheng, M.; Cao, B.; Liu, Q. Lyapunov optimization-based trade-off policy for mobile cloud offloading in heterogeneous wireless networks. IEEE Trans. Cloud Comput. 2019, 10, 491–505. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).