
A Novel Hybrid Maximum Power Point Tracking Technique for PV System under Complex Partial Shading Conditions in Campus Microgrid

Abstract
:1. Introduction
- In this paper, the author introduces a novel multi-strategy method to improve the TSO algorithm for MPPT tracking.
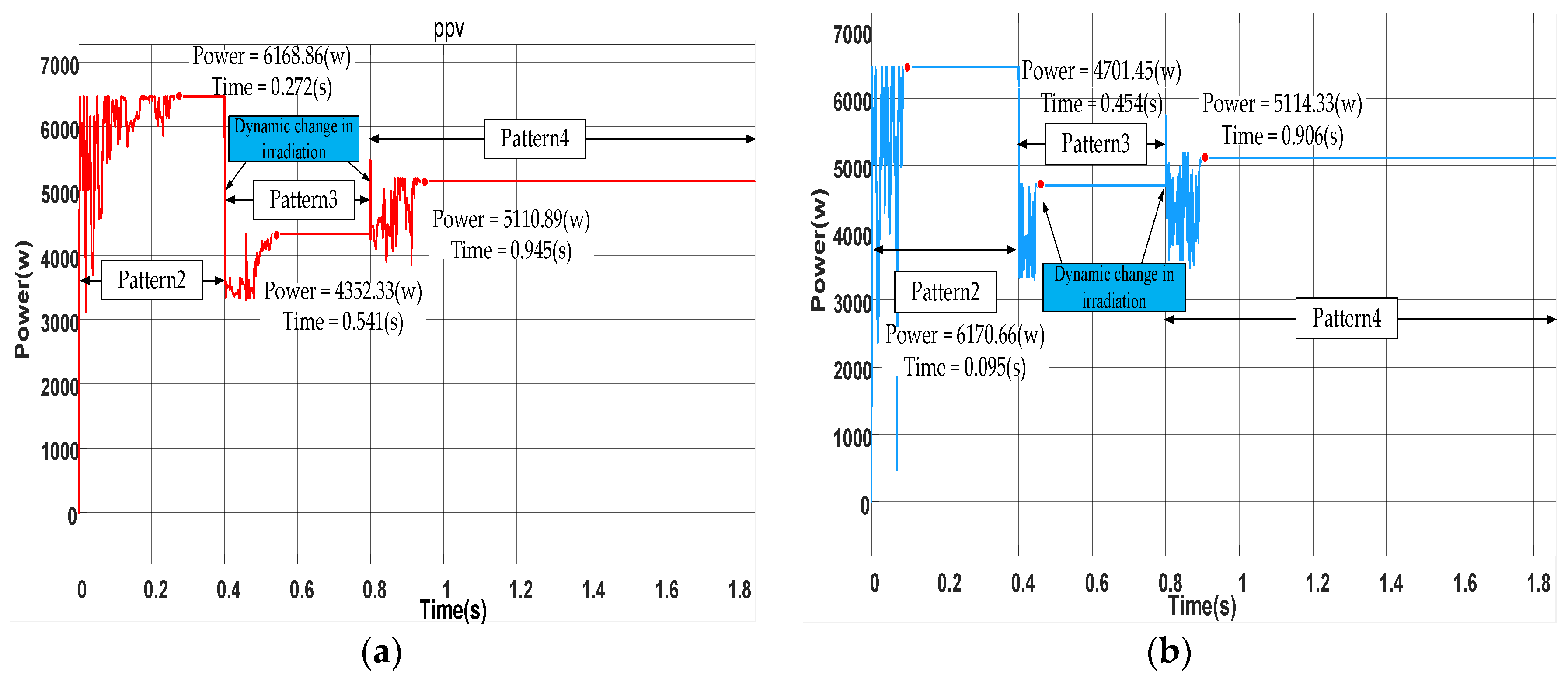
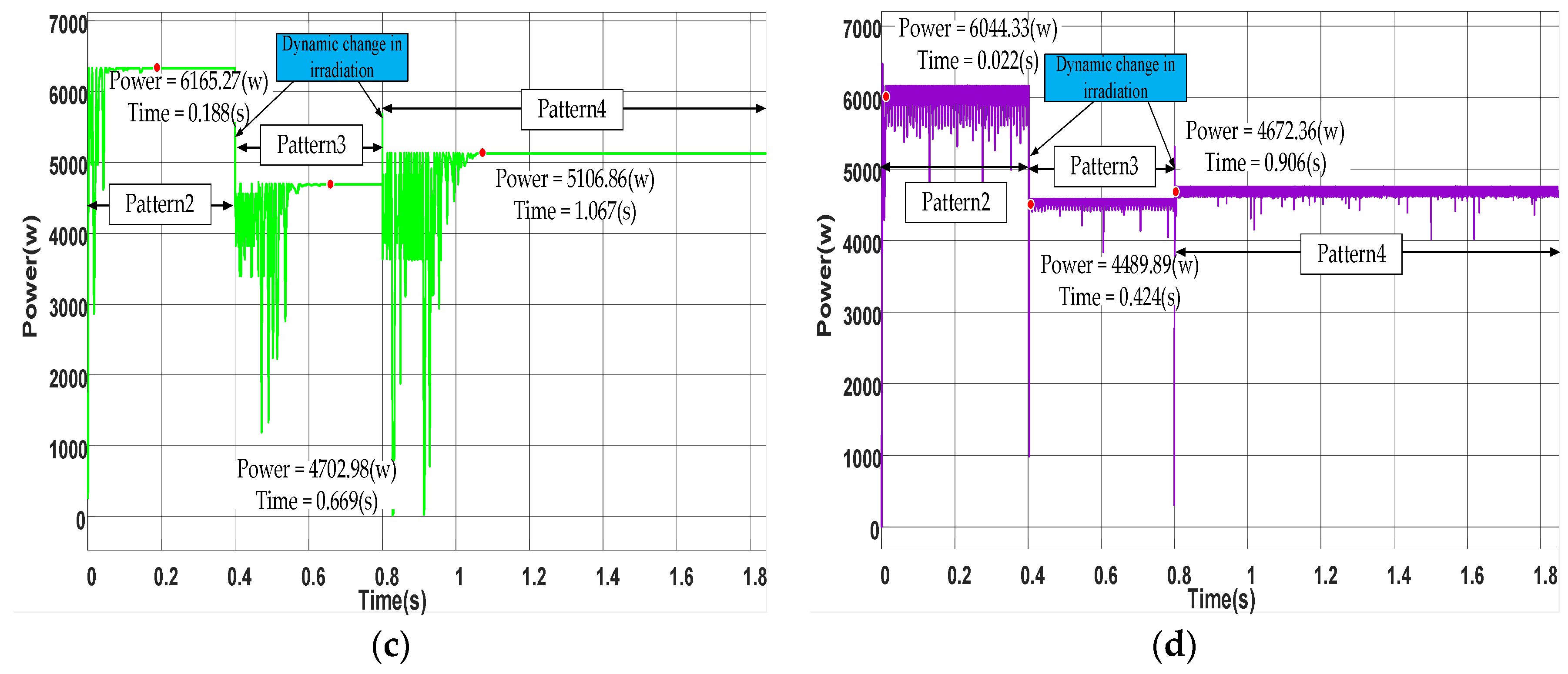
- A simulated battery model was established, and the effectiveness of the proposed method was verified using three different shadow conditions. To verify the effectiveness of the algorithm under changing shadow conditions, the photovoltaic array irradiance was set to suddenly change from pattern2, pattern3 to pattern4.
- During the sudden change of radiation conditions, the robustness of the algorithm in tracking GMPP was evaluated.
- By comparing the new algorithm with the basic TSO algorithm and CS algorithm, the superiority of the new algorithm in fitness convergence performance was verified.
- The simulation experiment of MPPT was carried out using a photovoltaic cell model. Compared with the basic TSO, CS, and INC, the results show that the new algorithm has more advantages in MPPT’s fast response and anti-interference.
2. Distributed PV System and Proposed MPPT Algorithm
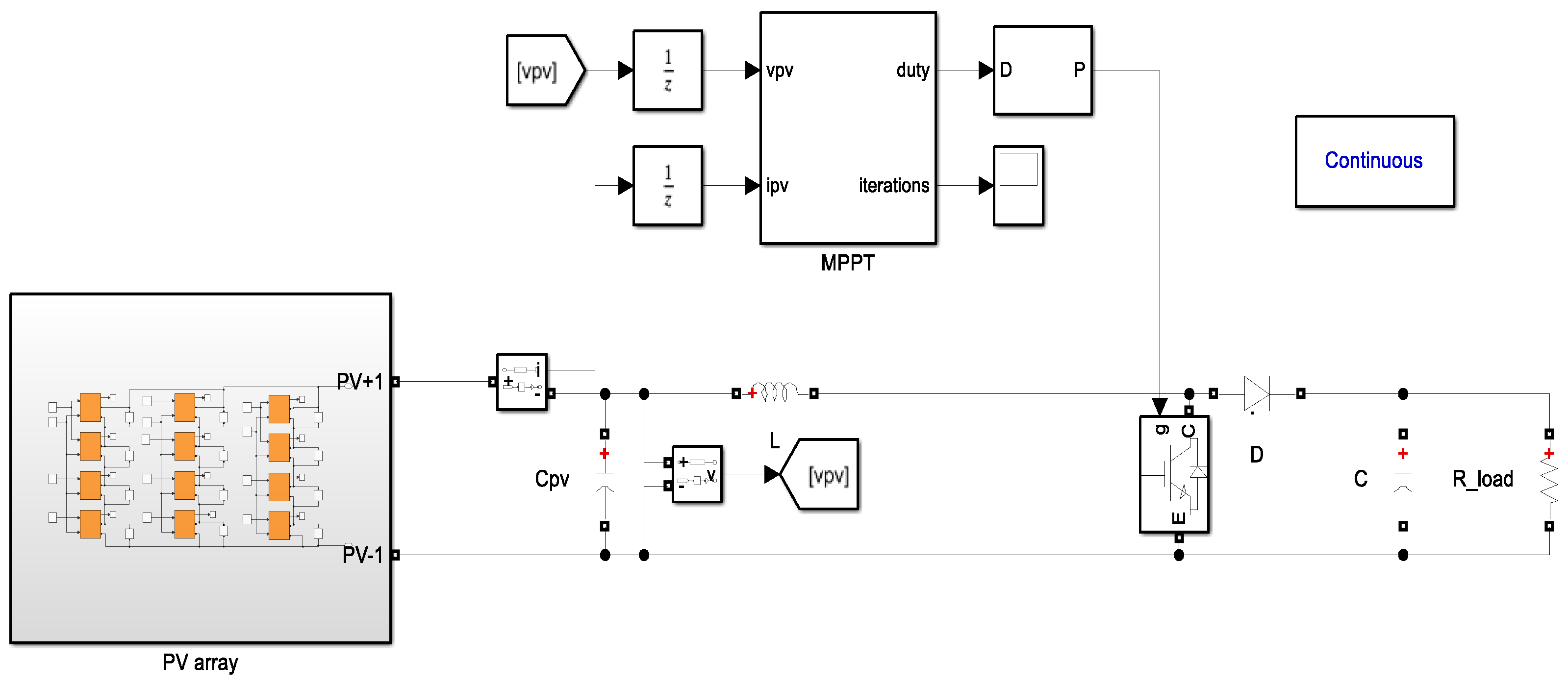
2.1. Distributed PV System
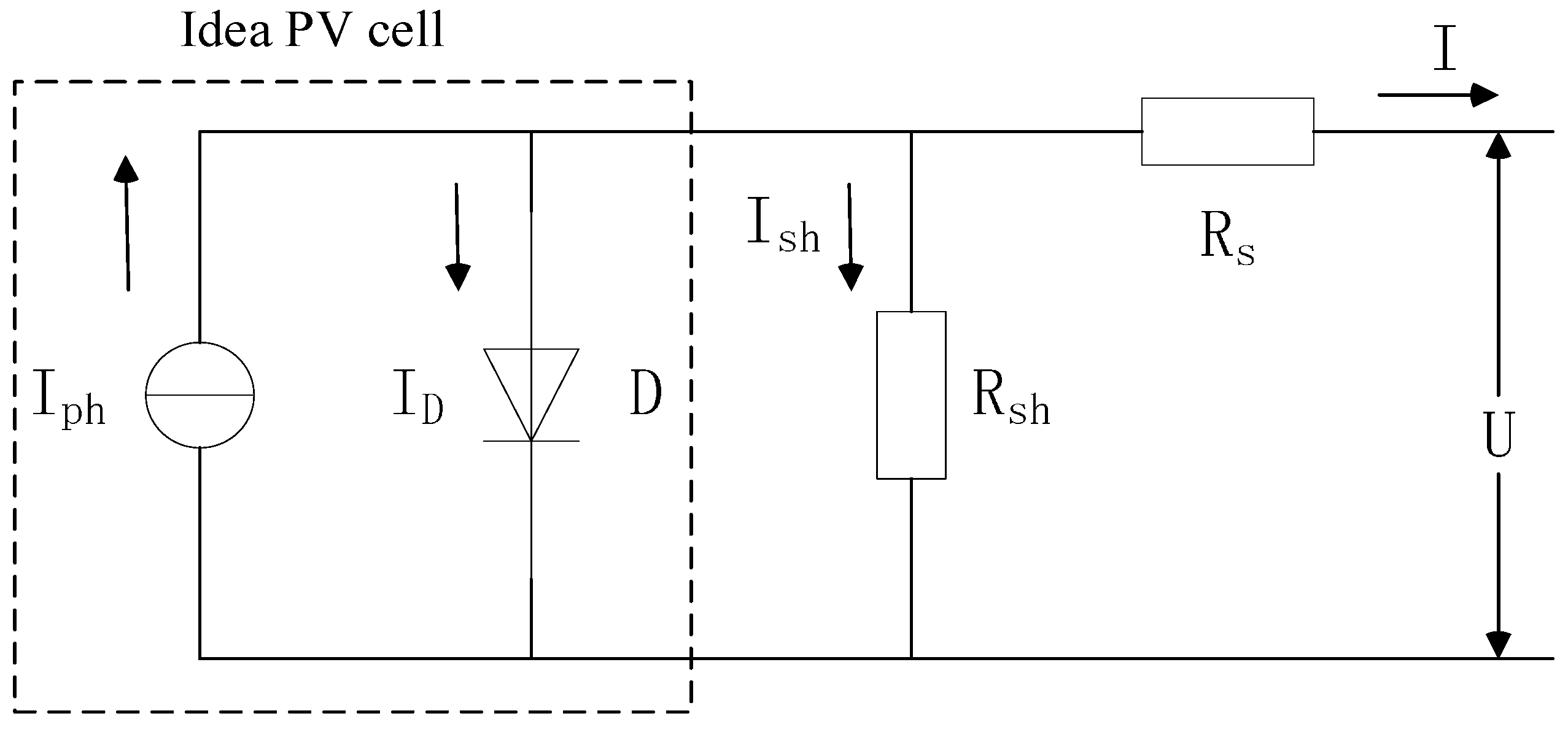
2.1.1. PV Module
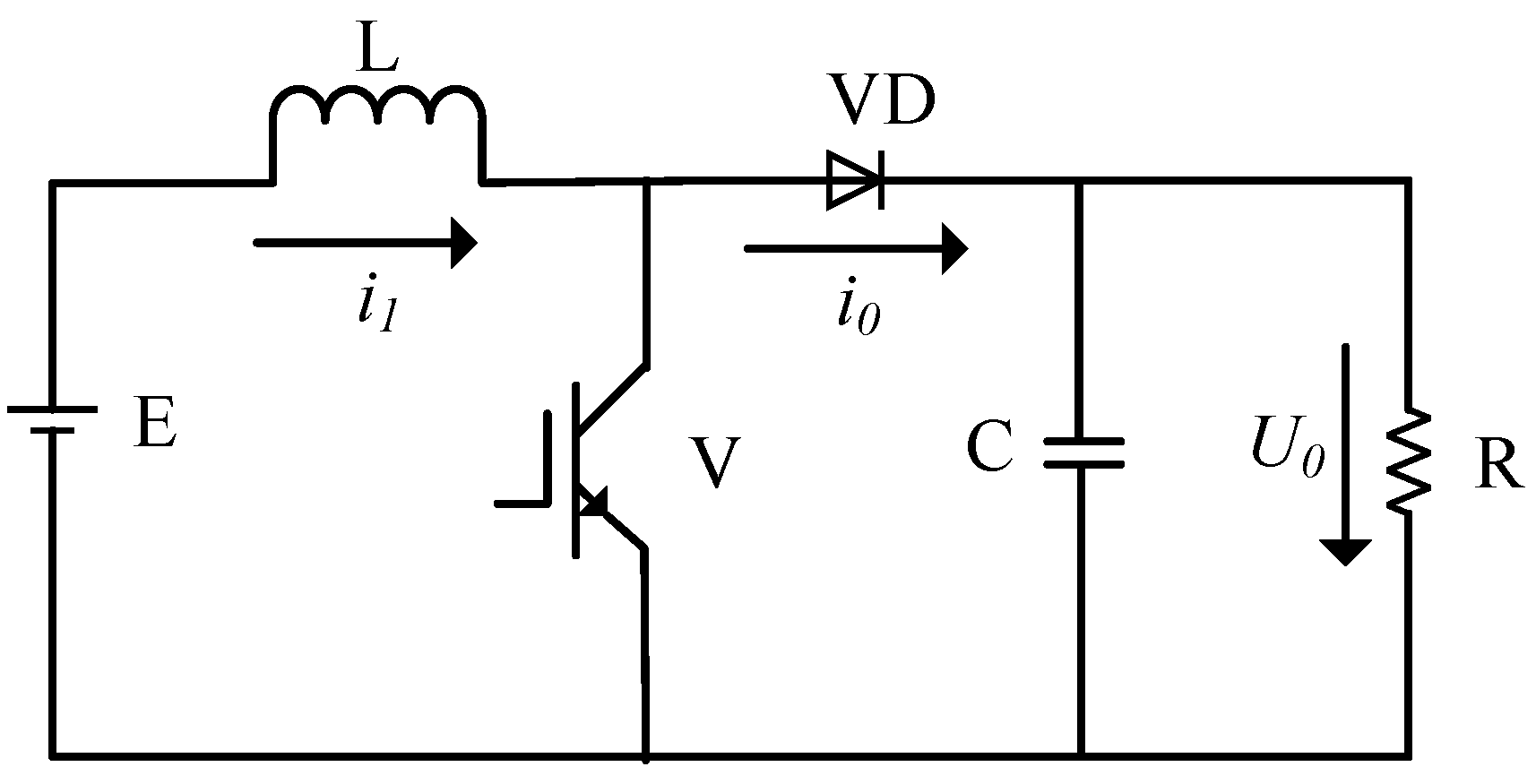
2.1.2. Description of DC–DC Boost Converter
2.1.3. Partial Shading and Its Effects
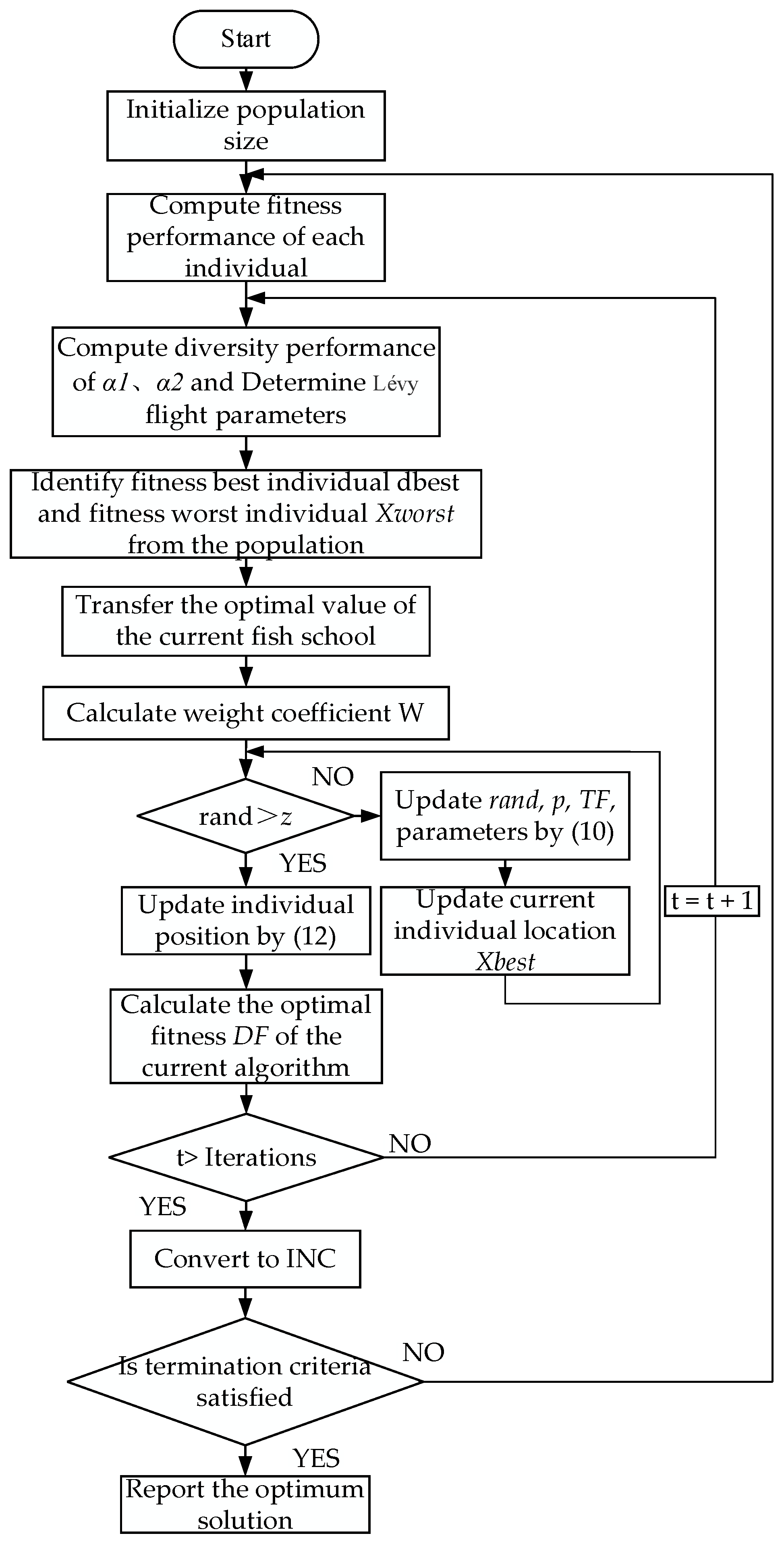
2.2. Multi-Strategy Improved Tuna Swarm Optimization (ITSO)
2.2.1. Initializing
2.2.2. Spiral Foraging
2.2.3. Parabolic Foraging
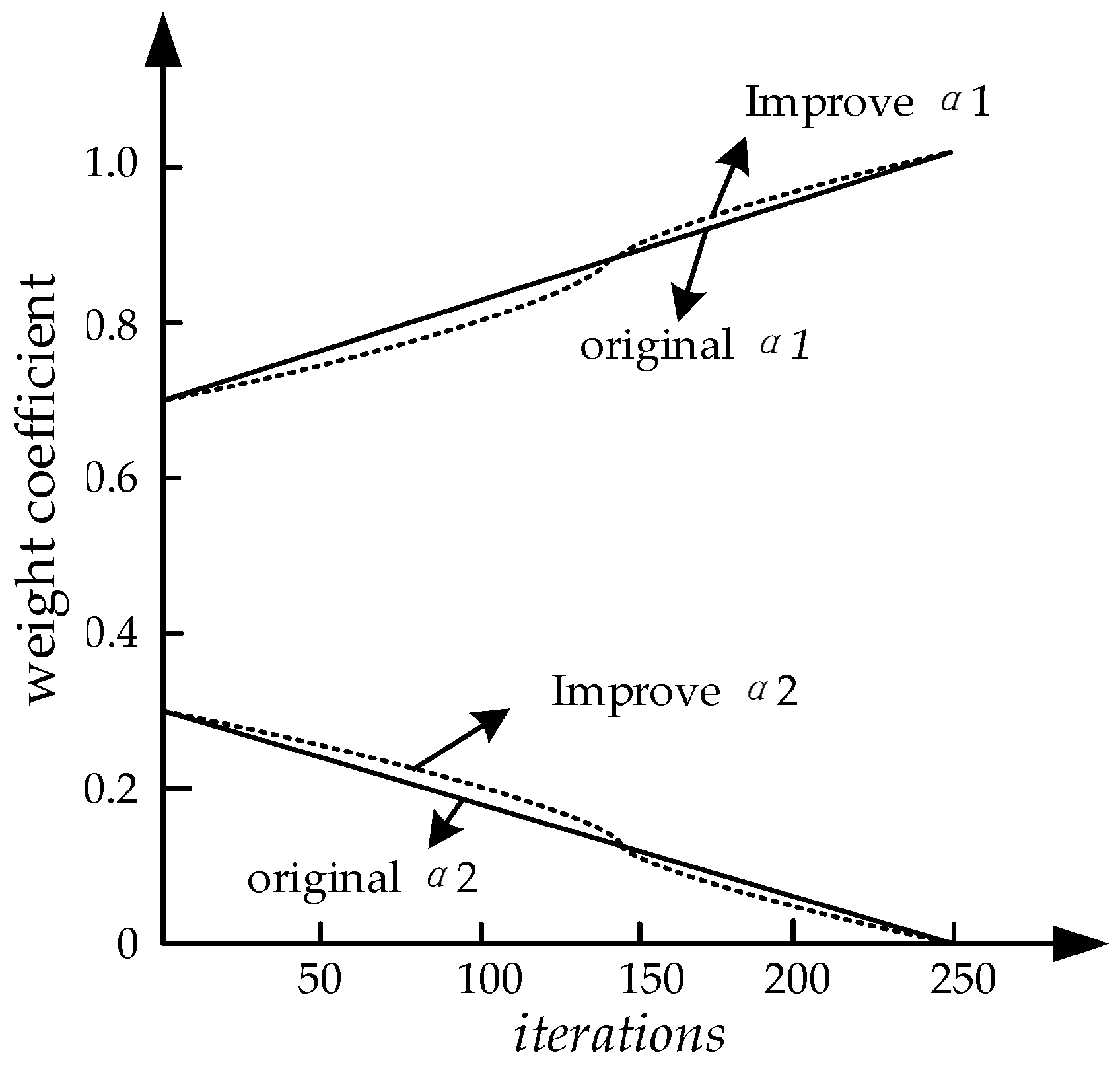
2.2.4. Step Length and Restart
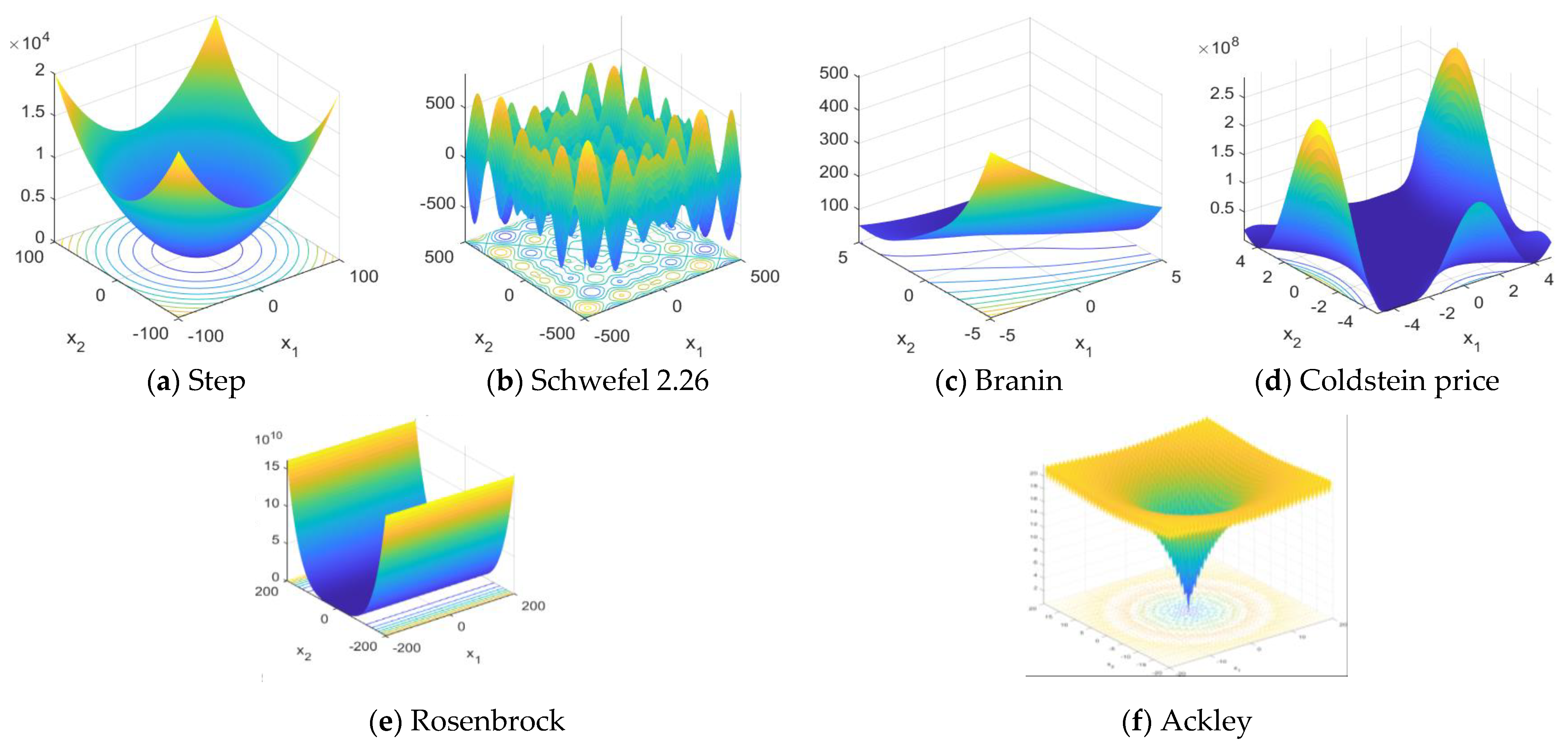
2.2.5. Algorithm Test
3. Simulation Results
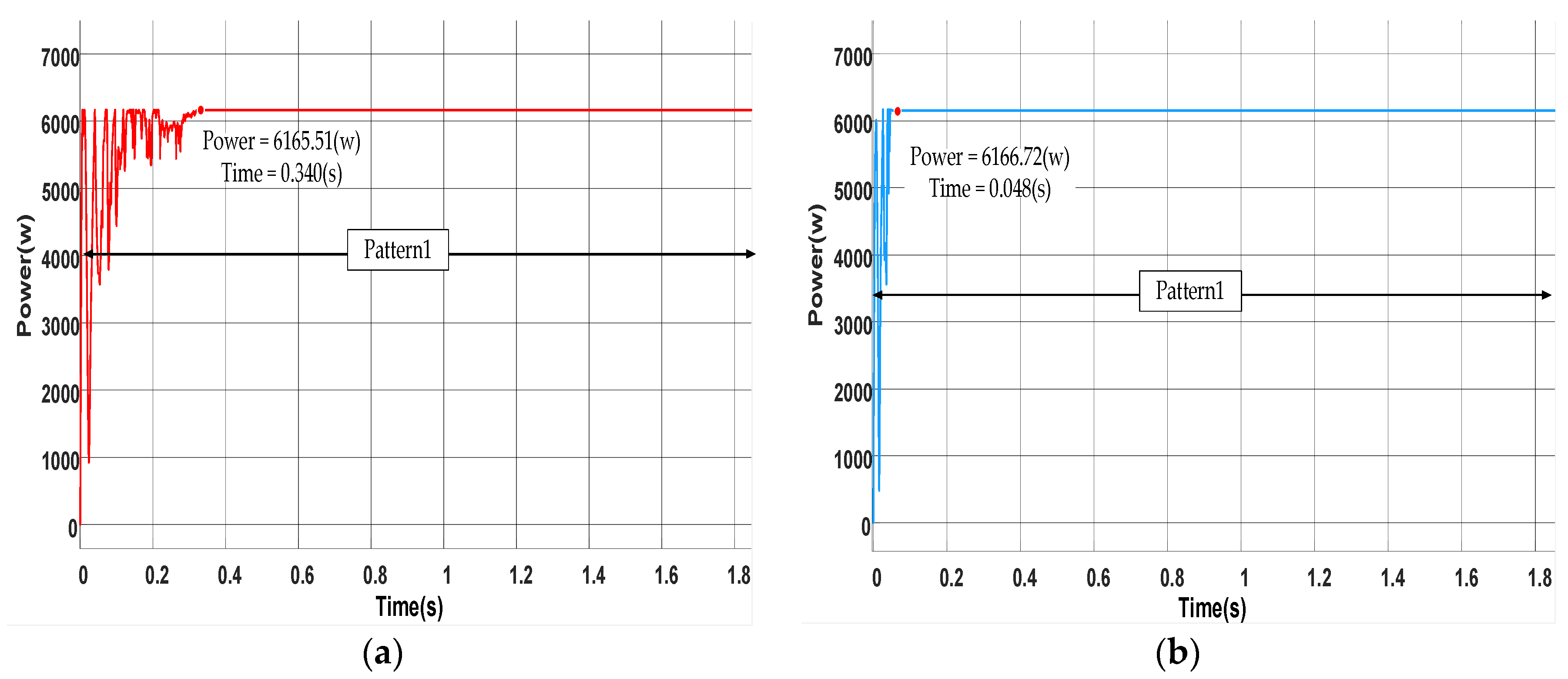
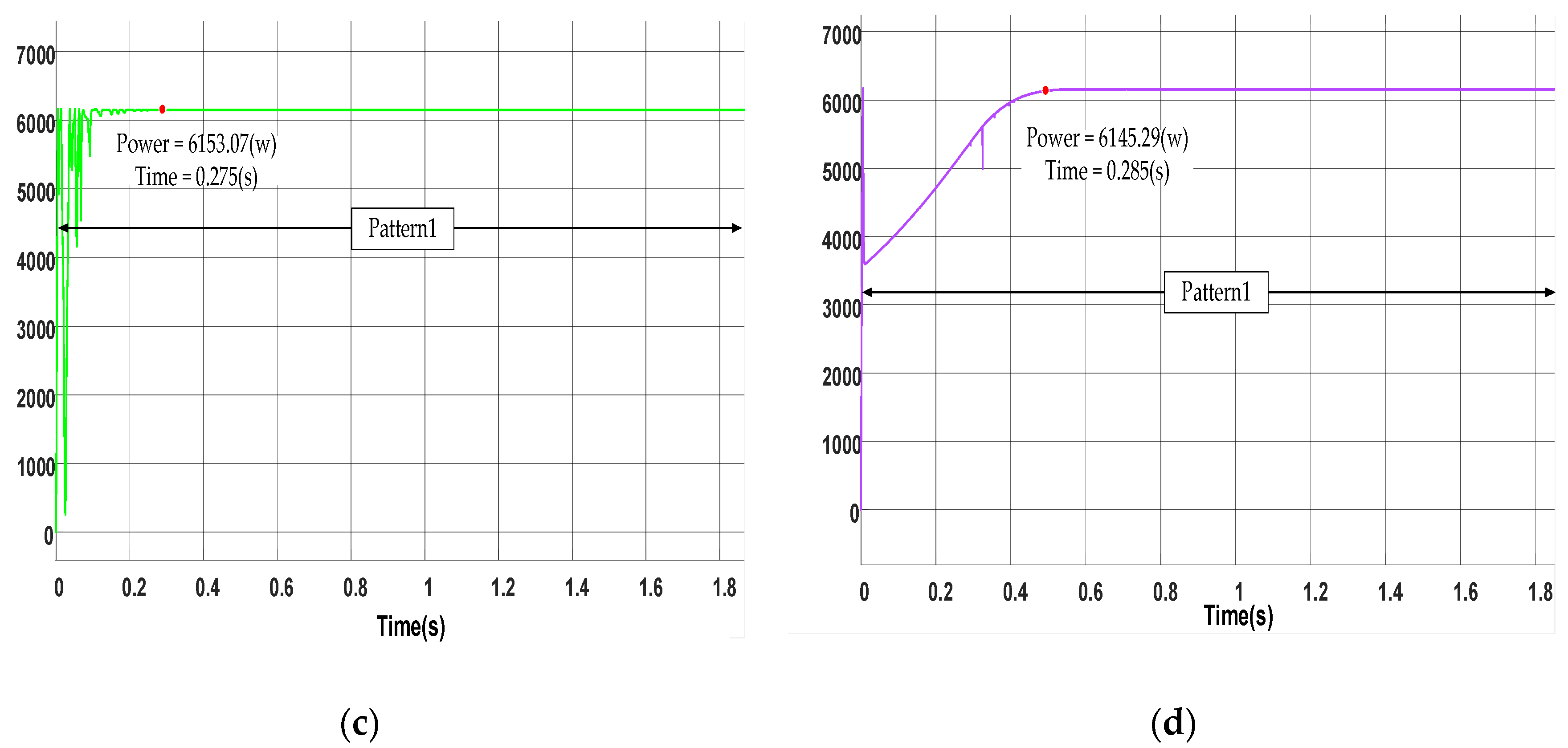
3.1. Result of Pattern 1
3.2. Result of Pattern 2, Pattern 3 and Pattern 4
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| PV | Photovoltaic |
| PSCs | Partial Shadow Conditions |
| MPPT | Maximum Power Point Tracking |
| P&O | Perturb & Observe |
| INC | Incremental Conductance |
| LMPP | Local Maximum Power Point |
| TSO | Tuna Swarm Optimization |
| ITSO-INC | Multi-strategy Improved Tuna Swarm Optimization hybrid INC |
| GMPP | Global Maximum Power Point |
| MPP | Maximum Power Point |
| CS | Cuckoo Search |
| FPA | Flower Pollination Algorithm |
| BA | Bat Algorithm |
| HS | Harmony Search |
| SSA | Squirrel Search Algorithm |
| DRL | Deep Reinforcement Learning |
| MCA | Musical Chairs Algorithm |
| PSO | Particle Swarm Optimization |
| ABC | Artificial Bee Colony |
| TSA | Tunicate Swarm Algorithm |
| TSA-PSO | Artificial Bee Colony Artificial Hybrid Particle Swarm Optimization |
| CS-GWO | Cuckoo Search Hybrid Gray Wolf Optimization |
| ABC-P&O | Artificial Bee Colony Hybrid Perturb & Observe |
| MPSO-MP&O | Modified Particle Swarm Optimization and Modified Perturb & Observe |
| IABC-SHTS | Improved artificial bee colony and simultaneous heat transfer search algorithm |
| MLPE | Module-level power electronics |
References
- Kusch-Brandt, S. Urban Renewable Energy on the Upswing: A Spotlight on Renewable Energy in Cities in REN21’s “Renewables 2019 Global Status Report. Resources 2019, 8, 139. [Google Scholar] [CrossRef]
- Fraunhofer. Photovoltaics Report 2021; Fraunhofer Institute for Solar Energy Systems: Freiburg, Germany, 2021. [Google Scholar]
- Huixiu, L.; Lina, Z.; Shuo, T. Research on photovoltaic MPPT control Strategy based on improved sliding mode control. J. Phys. Conf. Ser. 2022, 2310, 012039. [Google Scholar]
- Saba, J.; Kashif, I. A comprehensive analyses with new findings of different PSO variants for MPPT problem under partial shading. Ain Shams Eng. J. 2022, 13, 101680. [Google Scholar]
- Subramanian, A.; Jayaparvathy, R. Performance comparison of modified elephant herding optimization tuned MPPT for PV based solar energy systems. Circuit World 2022, 48, 309–321. [Google Scholar] [CrossRef]
- Harrison, A.; Nfah, E.M.; de Dieu Nguimfack Ndongmo, J.; Alombah, N.H. An Enhanced P&O MPPT Algorithm for PV Systems with Fast Dynamic and Steady-State Response under Real Irradiance and Temperature Conditions. Int. J. Photoenergy 2022, 2022, 6009632. [Google Scholar]
- Wentao, W.; Jun, T. An Improved Nonlinear Tuna Swarm Optimization Algorithm Based on Circle Chaos Map and Levy Flight Operator. Electronics 2022, 11, 3678. [Google Scholar]
- Diab, A.A.Z.; Rezk, H. Global MPPT based on flower pollination and differential evolution algorithms to mitigate partial shading in building integrated PV system. Sol. Energy 2017, 157, 171–186. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Kok Soon, T.; Jamei, E.; Thirunavukkarasu, G.S.; Horan, B.; Mekhilef, S.; Stojcevski, A. Maximum Power Point Tracking for Photovoltaic Systems under Partial Shading Conditions Using Bat Algorithm. Sustainability 2018, 10, 1347. [Google Scholar] [CrossRef]
- Geem, Z.W. A New Heuristic Optimization Algorithm: Harmony Search. Simulation 2001, 76, 60–68. [Google Scholar] [CrossRef]
- Jain, M.; Singh, V.; Rani, A. A novel nature-inspired algorithm for optimization: Squirrel search algorithm. Swarm Evol. Comput. 2018, 44, 148–175. [Google Scholar]
- Yousri, D.; Babu, T.S.; Allam, D.; Ramachandaramurthy, V.K.; Beshr, E.; Eteiba, M.B. Fractional Chaos Maps with Flower Pollination Algorithm for Partial Shading Mitigation of Photovoltaic Systems. Energies 2019, 12, 3548. [Google Scholar] [CrossRef]
- Ali, E.M.; Abdelsalam, A.K.; Youssef, K.H.; Hossam-Eldin, A.A. An Enhanced Cuckoo Search Algorithm Fitting for Photovoltaic Systems’ Global Maximum Power Point Tracking under Partial Shading Conditions. Energies 2021, 14, 7210. [Google Scholar] [CrossRef]
- Ram, J.P.; Rajasekar, N. A novel flower pollination based global maximum power point method for solar maximum power point tracking. IEEE Trans. Power Electron. 2017, 32, 8486–8499. [Google Scholar]
- Su, W.; Wencheng, C.; Liang, Z. Research on MPPT Based on Gray Wolf Algorithm improved by Levy Flight. J. Phys. Conf. Ser. 2021, 1865, 042089. [Google Scholar]
- Majad, M.; Feroz, M.A.; Fei, L.; Qiang, L. An Intelligent Tunicate Swarm Algorithm Based MPPT Control Strategy for Multiple Configurations of PV Systems under Partial Shading Conditions. Adv. Theory Simul. 2021, 4, 2100246. [Google Scholar]
- Eltamaly, A.M. A novel musical chairs algorithm applied for MPPT of PV systems. Renew. Sustain. Energy Rev. 2021, 146, 111135. [Google Scholar] [CrossRef]
- Eltamaly, A.M. An Improved Cuckoo Search Algorithm for Maximum Power Point Tracking of Photovoltaic Systems under Partial Shading Conditions. Energies 2021, 14, 953. [Google Scholar] [CrossRef]
- Sharma, A.; Sharma, A.; Jately, V.; Averbukh, M.; Rajput, S.; Azzopardi, B. A Novel TSA-PSO Based Hybrid Algorithm for GMPP Tracking under Partial Shading Conditions. Energies 2022, 15, 3164. [Google Scholar] [CrossRef]
- Salim, J.A.; Albaker, B.M.; Alwan, M.S.; Hasanuzzaman, M. Hybrid MPPT approach using Cuckoo Search and Grey Wolf Optimizer for PV systems under variant operating conditions. Glob. Energy Interconnect. 2022, 5, 627–644. [Google Scholar] [CrossRef]
- Restrepo, C.; Yanẽz-Monsalvez, N.; González-Castaño, C.; Kouro, S.; Rodriguez, J. A Fast Converging Hybrid MPPT Algorithm Based on ABC and P&O Techniques for a Partially Shaded PV System. Mathematics 2021, 9, 2228. [Google Scholar]
- Rajamand, S. A novel sliding mode control and modified PSO-modified P&O algorithms for peak power control of PV. ISA Trans. 2022, 130, 533–552. [Google Scholar]
- Gong, L.; Hou, G.; Huang, C. A two-stage MPPT controller for PV system based on the improved artificial bee colony and simultaneous heat transfer search algorithm. ISA Trans. 2022, 132, 428–443. [Google Scholar] [CrossRef] [PubMed]
- Aly, M.; Mohamed, E.A.; Rezk, H.; Nassef, A.M.; Elhosseini, M.A.; Shawky, A. An Improved Optimally Designed Fuzzy Logic-Based MPPT Method for Maximizing Energy Extraction of PEMFC in Green Buildings. Energies 2023, 16, 1197. [Google Scholar] [CrossRef]
- Başoğlu, M.E. Comprehensive review on distributed maximum power point tracking: Submodule level and module level MPPT strategies. Sol. Energy 2022, 241, 85–108. [Google Scholar]
- Xie, L.; Han, T.; Zhou, H.; Zhang, Z.R.; Han, B.; Tang, A. Tuna Swarm Optimization: A Novel Swarm-Based Metaheuristic Algorithm for Global Optimization. Comput. Intell. Neurosci. 2021, 2021, 9210050. [Google Scholar] [PubMed]
- Shishavan, S.T.; Gharehchopogh, F.S. An improved cuckoo search optimization algorithm with genetic algorithm for community detection in complex networks. Multimed. Tools Appl. 2022, 81, 25205–25231. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Years | Algorithms | Control Parameter | Remark |
|---|---|---|---|---|
| [12] | 2019 | Improve FPA | Duty cycle | The proposed technique merged fractional chaos maps with the Flower Pollination Algorithm (FPA) and compared the accuracy between different chaotic variants. |
| [13] | 2021 | CS | Duty cycle | The proposed algorithm avoids spreading the initial particles among the whole curve to predict shading patterns. |
| [14] | 2017 | FPA | Duty cycle | FPA was added to the MPPT application and the efficiency of FPA was compared with P&O and INC. |
| [15] | 2021 | Improve GWO | Duty cycle | Levy flight strategy was added to GWO to improve MPPT tracking accuracy. |
| [16] | 2021 | TSA | Voltage | The TSA algorithm was used to solve the partial shadow problem in MPPT, and a search and skip scheme (SAS) was added to minimize the search range. |
| [17] | 2021 | MCA | Duty cycle | Compared to most basic metaheuristic algorithms, the MCA algorithm has significant advantages in tracking speed and reducing vibration amplitude. |
| [18] | 2021 | ICS | Duty cycle | By improving the CS algorithm, the problems of high oscillation, high failure rate, and long convergence time in the basic CS algorithm were solved. |
| [19] | 2022 | Hybrid TSA-PSO | Duty cycle | The effectiveness of TSA-PSO was proved by simulation experiments, and the tracking accuracy reached 97.64%. Two nonparametric tests were used to prove the reliability of the algorithm. |
| [20] | 2022 | Hybrid CS-GWO | Duty cycle | By combining GWO and CS in MPPT, the efficiency of the hybrid GWO-CS algorithm was higher than that of the separate GWO and CS. |
| [21] | 2021 | Hybrid ABC-P&O | Duty cycle | The ABC-P&O algorithm has a reasonable computational cost. The experiment proved that ABC-P&O has a good performance under different PSCs. |
| [22] | 2022 | MPSO-MP&O | Duty cycle | This paper combined the improved PSO algorithm with an improved P&O method by analyzing two sliding mode control structures. The stability of MPP was achieved under changes in physical parameters of different photovoltaic systems. |
| [23] | 2022 | Hybrid IABC-SHTS | Duty cycle | The combination of an improved Artificial Bee Colony algorithm and multiple heat transfer search algorithms effectively reduced the subjectivity of manually setting parameters in the algorithm, ensuring the universality and accuracy of the search process. |
| Item | Value |
|---|---|
| Frequency of switching | 50 Hz |
| C | 202.55 × 10−6 F |
| L | 8.578 × 10−3 H |
| R | 20 Ohm |
| Parameters | PV Modules |
|---|---|
| Maximum Power | 213.15 W |
| Peak power voltage (Vmpp) | 29 V |
| Peak power current (Impp) | 7.35 A |
| Open circuit voltage (Voc) | 36.3 V |
| Short circuit current (Isc) | 7.84 A |
| Current temperature coefficient (ki) | −0.36099 %/°C |
| Voltage temperature coefficient (kv) | 0.102 %/°C |
| No. of cells | 48 |
| Type of Pattern | Irradiance | Maximum Peak Power Point (MPP)/W | ||
|---|---|---|---|---|
| W/m2 | ||||
| Pattern 1 | G11 = 600 | G12 = 600 | G13 = 600 | GMPP = 6166.58 |
| G21 = 600 | G22 = 600 | G23 = 600 | ||
| G31 = 600 | G32 = 600 | G33 = 600 | ||
| G41 = 600 | G42 = 600 | G43 = 600 | ||
| Pattern 2 | G11 = 1000 | G12 = 1000 | G13 = 1000 | GMPP = 6470.72 |
| G21 = 1000 | G22 = 800 | G23 = 1000 | LMPP1 = 6159.16 | |
| G31 = 800 | G32 = 800 | G33 = 800 | LMPP2 = 4750.62 | |
| G41 = 600 | G42 = 600 | G43 = 400 | LMPP3 = 2641.03 | |
| Pattern 3 | G11 = 1000 | G11 = 1000 | G13 = 1000 | GMPP = 4725.83 |
| G21 = 1000 | G22 = 800 | G23 = 1000 | LMPP1 = 4578.65 | |
| G31 = 400 | G32 = 400 | G33 = 400 | LMPP2 = 4577.86 | |
| G41 = 600 | G42 = 600 | G43 = 400 | LMPP3 = 2641.03 | |
| Pattern 4 | G11 = 1100 | G11 = 1300 | G13 = 1200 | GMPP = 5188.57 |
| G21 = 1100 | G22 = 400 | G23 = 1200 | LMPP1 = 4867.55 | |
| G31 = 400 | G32 = 800 | G33 = 400 | LMPP2 = 4609.46 | |
| G41 = 700 | G42 = 600 | G43 = 400 | LMPP3 = 3115.19 | |
| Name | Function | Dim | Range | Fmin |
|---|---|---|---|---|
| Step | 30 | [−100, 100] | 0 | |
| Schwefel 2.26 | 30 | [−500, 500] | −418.98 × D | |
| Branin | 30 | [−5, 10] | 0.398 | |
| Goldstein price | 30 | [−5, 5] | 3 | |
| Rosenbrock | 30 | [−30, 30] | 0 | |
| Ackley | 30 | [−32, 32] | 0 |
| Function | Performance | ITSO | TSO | CS |
|---|---|---|---|---|
| F1 | Mean | 2.13 × 10−10 | 1.21 × 10−9 | 5.45 × 10−7 |
| Std | 2.29 × 10−10 | 8.74 × 10−6 | 6.25 × 10−8 | |
| F2 | Mean | −1.195 × 104 | −9.925 × 103 | −6.128 × 103 |
| Std | 7.583 × 102 | 3.153 × 103 | 8.997 × 102 | |
| F3 | Mean | 3.98 × 10−1 | 3.99 × 10−1 | 3.96 × 10−1 |
| Std | 0.00 × 100 | 6.82 × 10−6 | 4.78 × 10−7 | |
| F4 | Mean | 3.01 × 100 | 3.00 × 100 | 4.20 × 100 |
| Std | 2.81 × 10−15 | 7.75 × 10−16 | 2.09 × 101 | |
| F5 | Mean | 2.759 × 101 | 2.896 × 101 | 2.226 × 105 |
| Std | 1.058 × 100 | 1.163 × 100 | 9.868 × 103 | |
| F6 | Mean | 9.203 × 10−7 | 4.392 × 10−6 | 1.895 × 101 |
| Std | 5.295 × 10−6 | 5.961 × 10−5 | 3.459 × 100 |
| Technique | Parameters |
|---|---|
| ITSO-INC | z = 0.5, β = 1.5 |
| CS | β = 1.5, α = 0.8, pa = 0.25 |
| TSO | z = 0.05, a = 0.8 |
| Parameter/Method | TSO | ITSO-INC | CS | INC |
|---|---|---|---|---|
| Extracted power (w) | 6165.51 | 6166.72 | 6153.07 | 6145.29 |
| Tracking efficiency (%) | 99.97 | 99.99 | 99.77 | 99.62 |
| Tracking time (s) | 0.340 | 0.048 | 0.275 | 0.41 |
| Parameter/Method | TSO | ITSO-INC | CS | INC | |
|---|---|---|---|---|---|
| Pattern 3 | Extracted power (w) | 6468.86 | 6470.66 | 6265.27 | 6044.33 |
| Tracking efficiency (%) | 99.97 | 99.99 | 99.94 | 96.82 | |
| Tracking time (s) | 0.272 | 0.095 | 0.188 | 0.022 | |
| Pattern 4 | Extracted power (w) | 4352.33 | 4701.45 | 4702.98 | 4489.89 |
| Tracking efficiency (%) | 92.09 | 99.48 | 99.51 | 95.00 | |
| Tracking time (s) | 0.141 | 0.054 | 0.269 | 0.024 | |
| Pattern 5 | Extracted power (w) Tracking efficiency (%) Tracking time (s) | 5110.89 98.50 0.145 | 5114.33 98.56 0.106 | 5106.86 98.41 0.267 | 4672.36 91.08 0.006 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, L.; Jiang, Y.; Gan, Y.; Zhang, J.; Yuan, S. A Novel Hybrid Maximum Power Point Tracking Technique for PV System under Complex Partial Shading Conditions in Campus Microgrid. Appl. Sci. 2023, 13, 4998. https://doi.org/10.3390/app13084998
Li Y, Li L, Jiang Y, Gan Y, Zhang J, Yuan S. A Novel Hybrid Maximum Power Point Tracking Technique for PV System under Complex Partial Shading Conditions in Campus Microgrid. Applied Sciences. 2023; 13(8):4998. https://doi.org/10.3390/app13084998
Chicago/Turabian StyleLi, Yanbo, Linyi Li, Yechao Jiang, Yinghao Gan, Jianfeng Zhang, and Shibo Yuan. 2023. "A Novel Hybrid Maximum Power Point Tracking Technique for PV System under Complex Partial Shading Conditions in Campus Microgrid" Applied Sciences 13, no. 8: 4998. https://doi.org/10.3390/app13084998