

Seismic Performance of Frame Structure with Hysteretic Intermediate Discontinuity

Abstract
:1. Introduction
2. The Mechanical Model
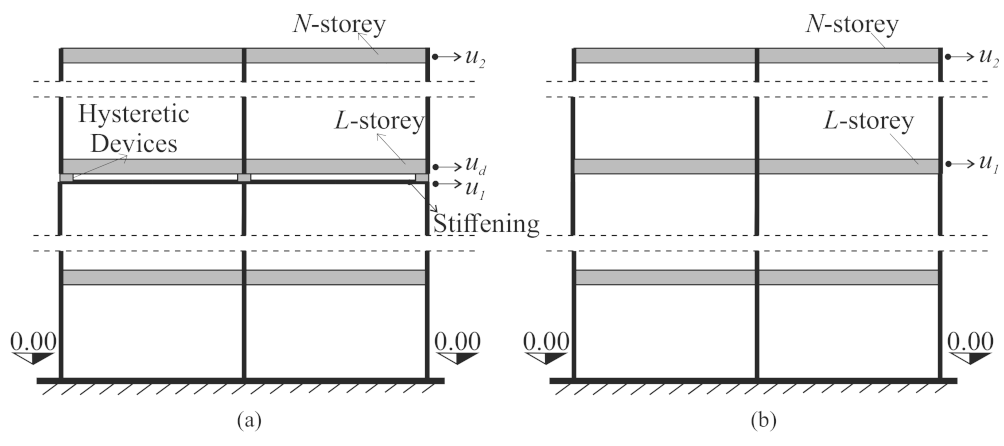
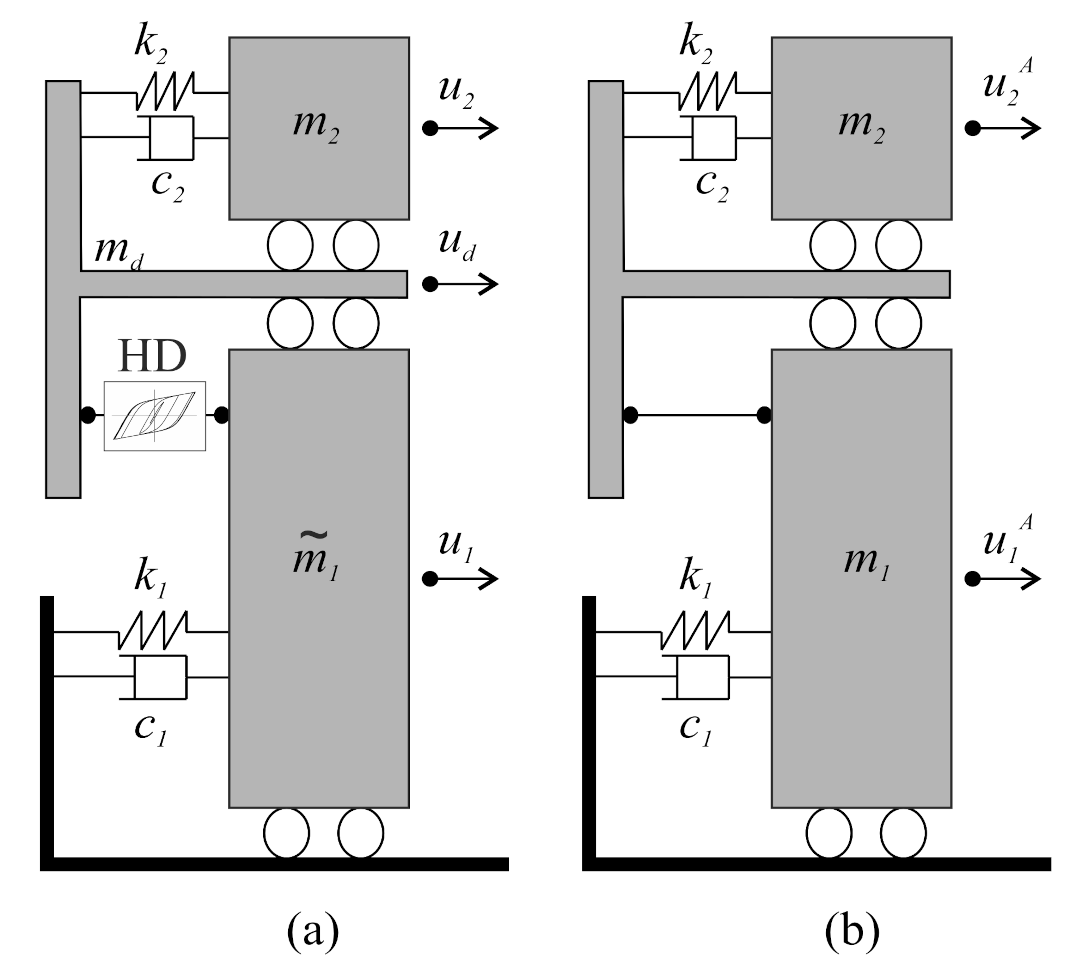
2.1. Archetype Model
2.2. Dynamic Equivalence between Multiple-DOF Systems and Archetype Models
- The frequency of the main mode of the M-DOF system without discontinuity and of the first mode of the AS (Figure 2b) are the same;
- The modal displacements of the storey of the discontinuity and top storey (i.e., L-th and N-th storeys in Figure 1a of the M-DOF system without discontinuity are equal to the modal displacements and of the AS.
2.3. Characteristics of the Frame
2.4. Gain Coefficients
2.5. Variable Parameters
- Post-yielding to pre-yielding stiffness ratio .
- Yield displacement ratio .
- Pre-yielding to storey stiffness ratio .
- Discontinuity level of the frame structure L.
3. Harmonic Analysis
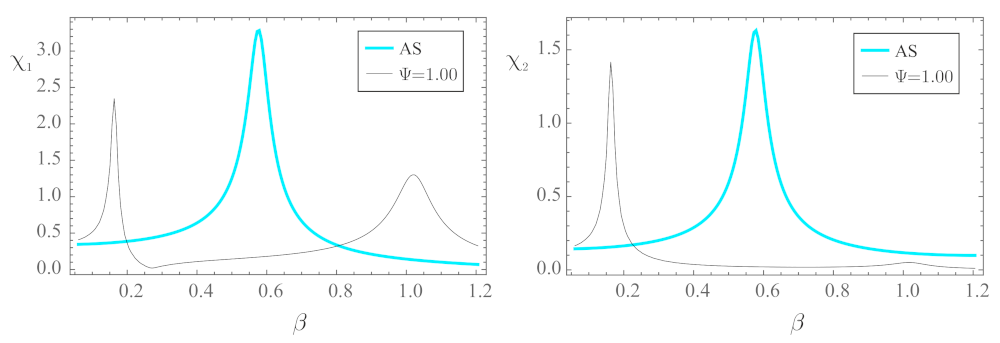
3.1. Frequency-Response Curves
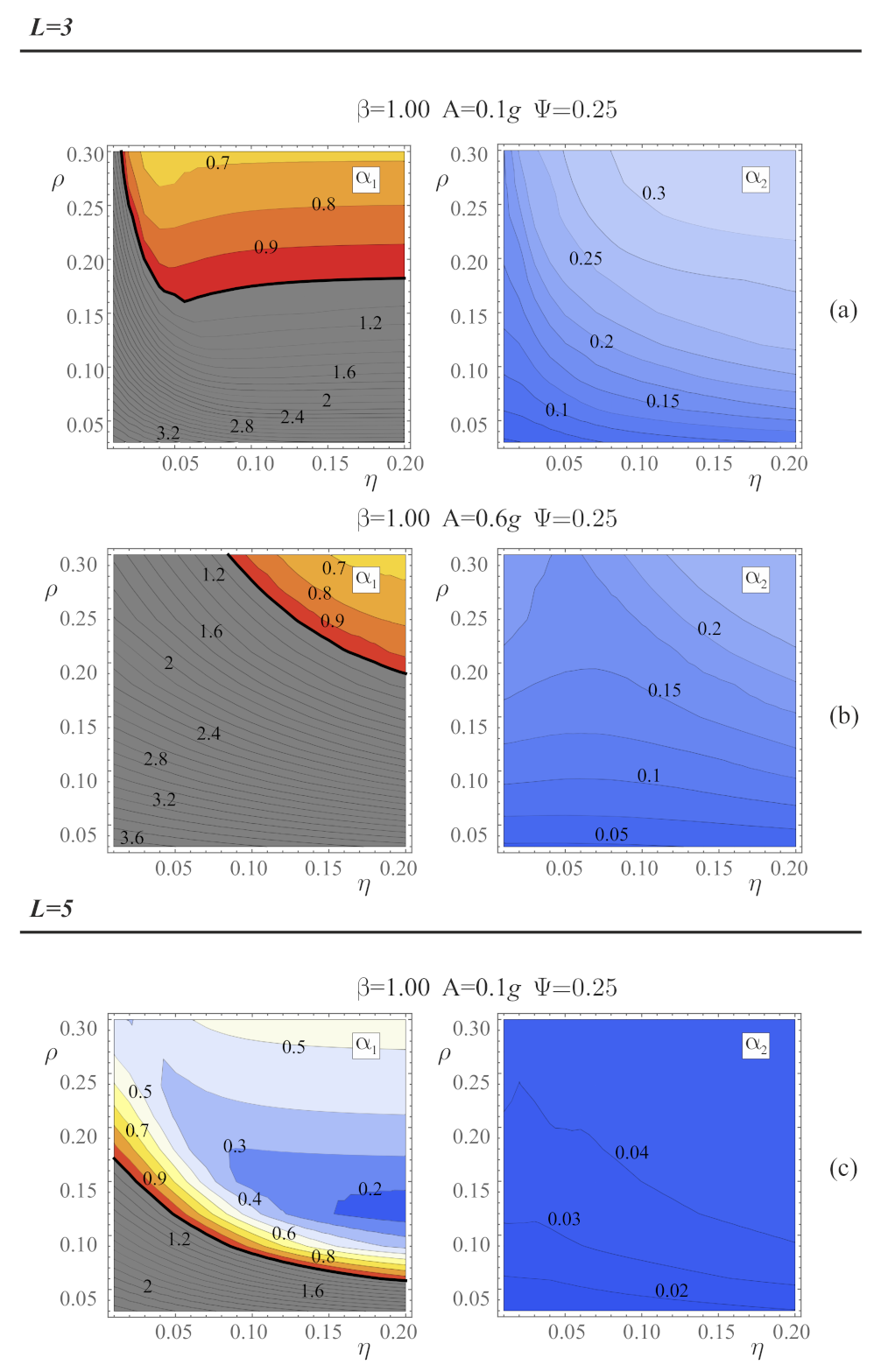
3.2. Gain Maps
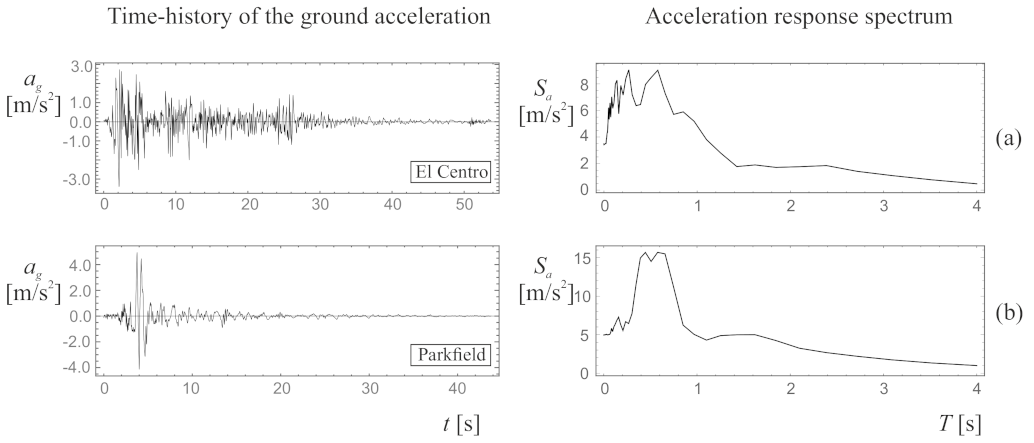
4. Seismic Analysis
- (a)
- El Centro, CA, Array Station 9, Imperial Valley Irrigation District, component 180;
- (b)
- Parkfield, CO2-065 ground motion recorded during the California earthquake 1966.
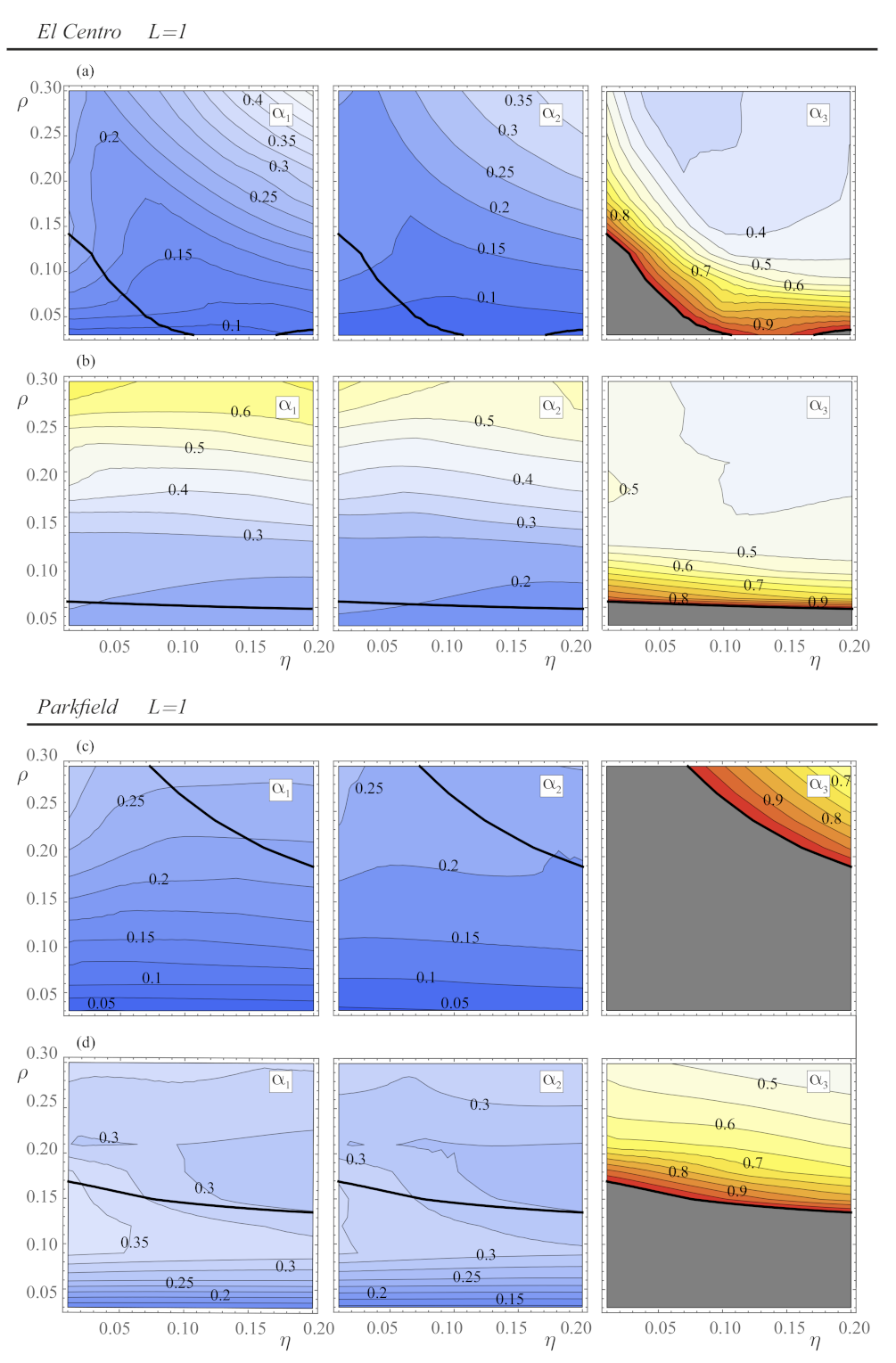
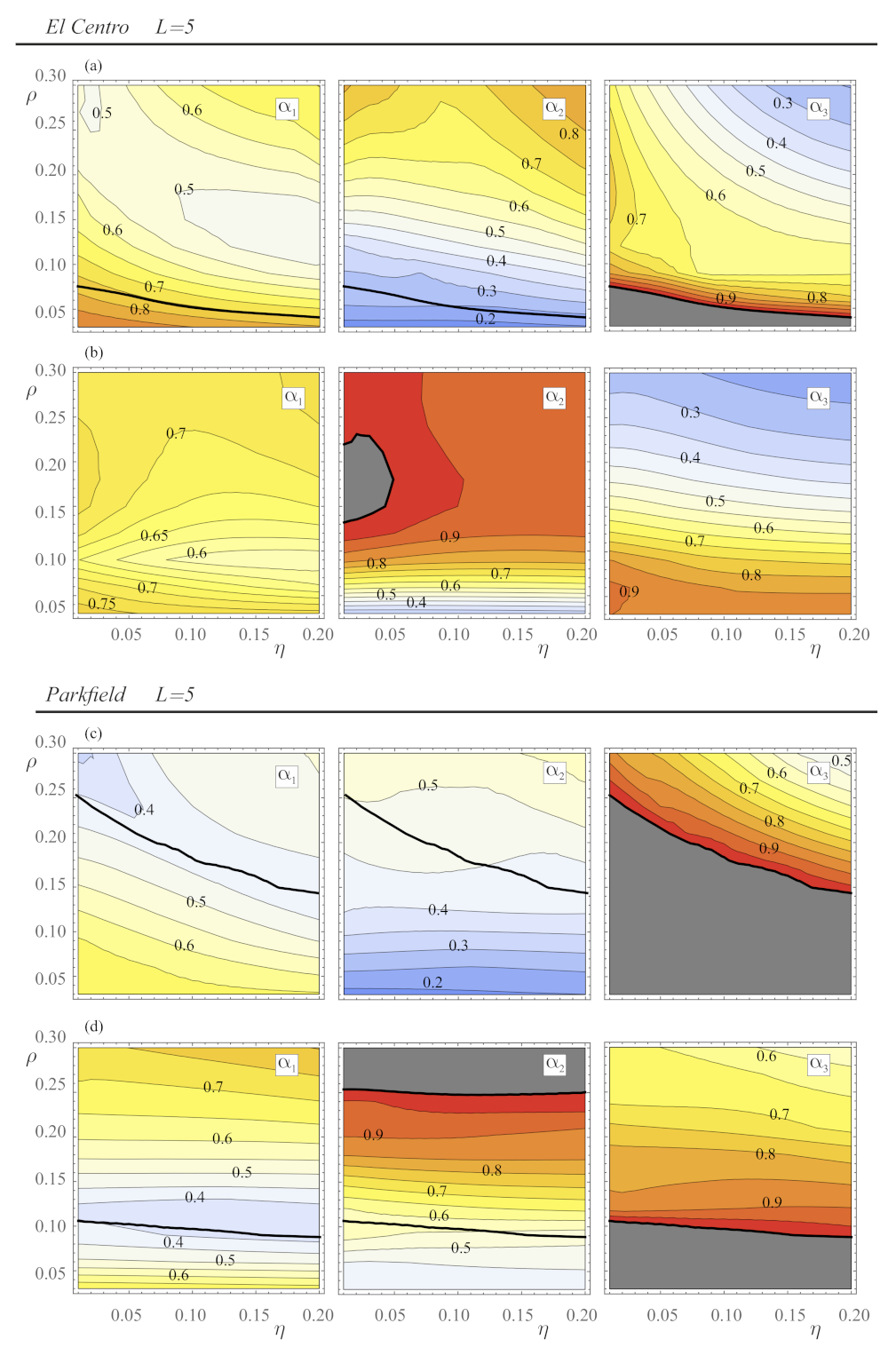
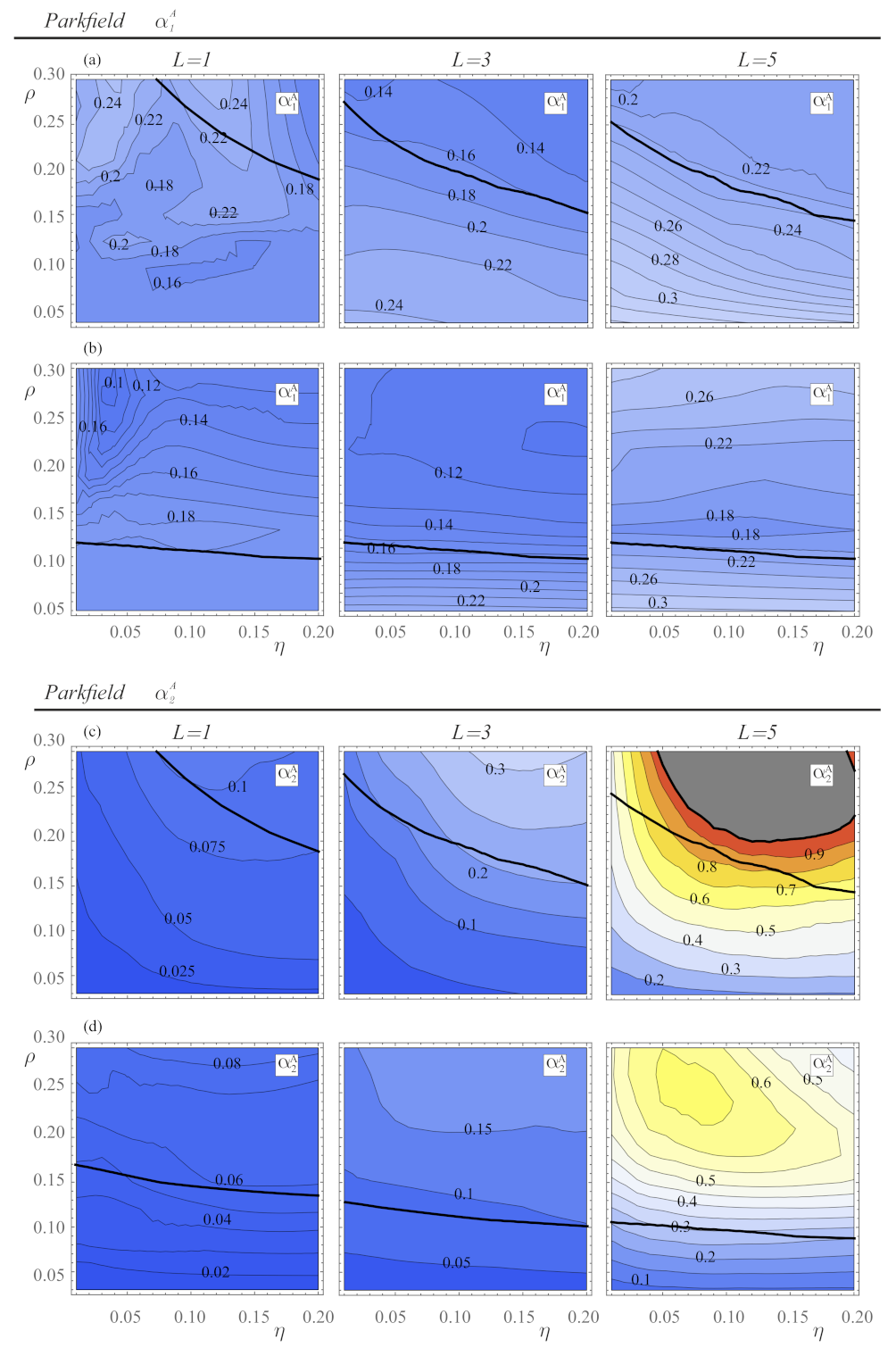
4.1. Gain Maps from a Single Seismic Record
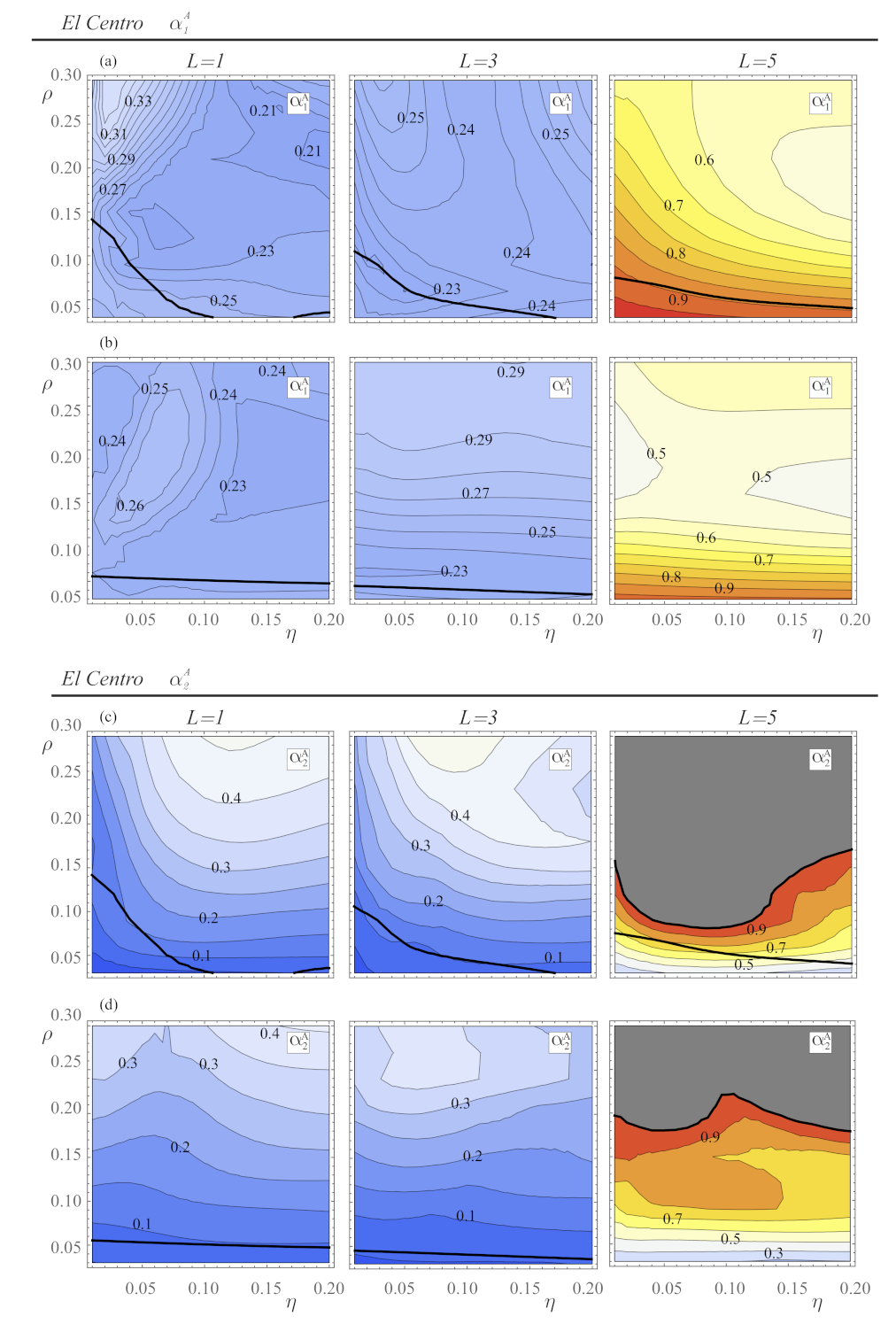
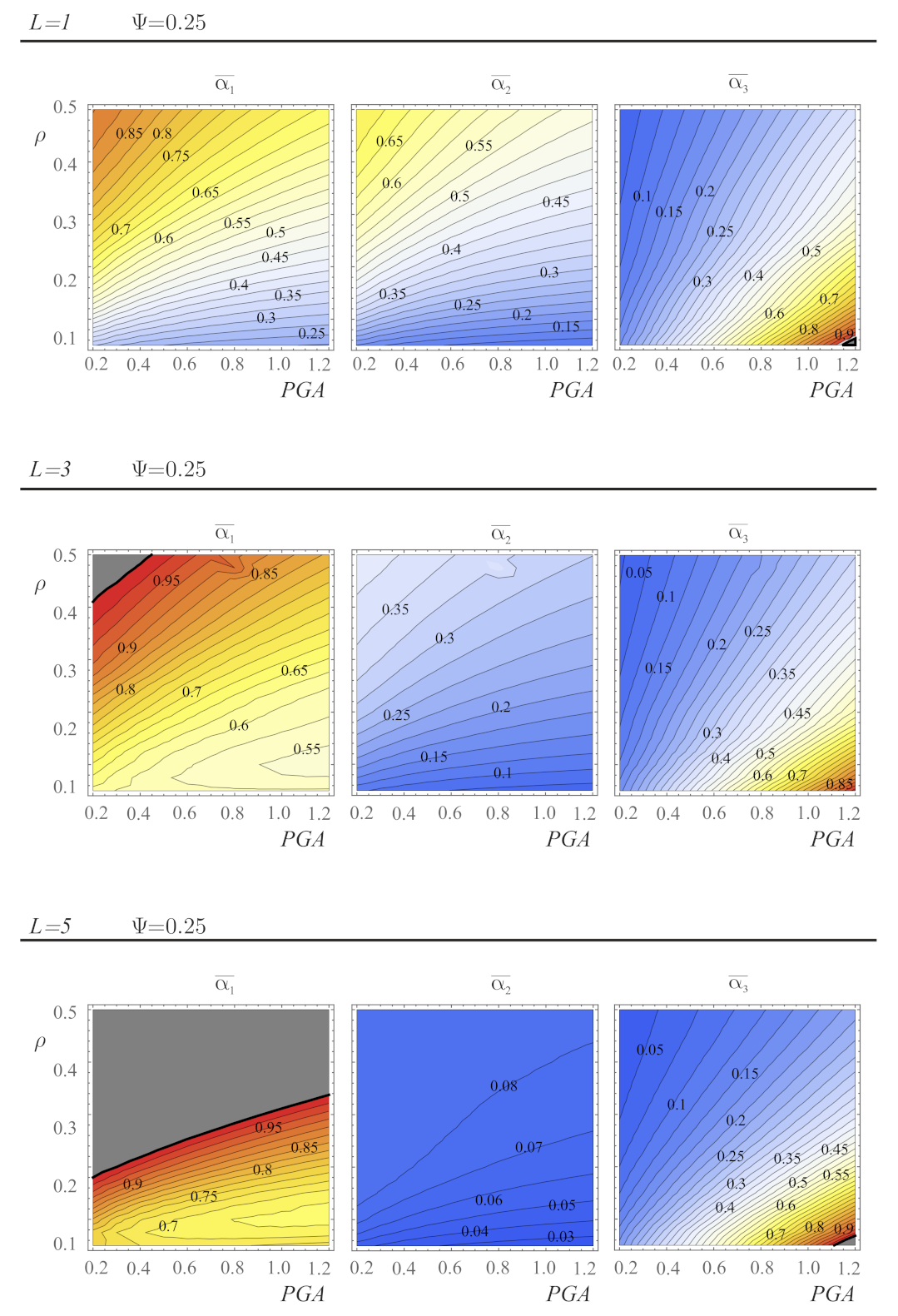
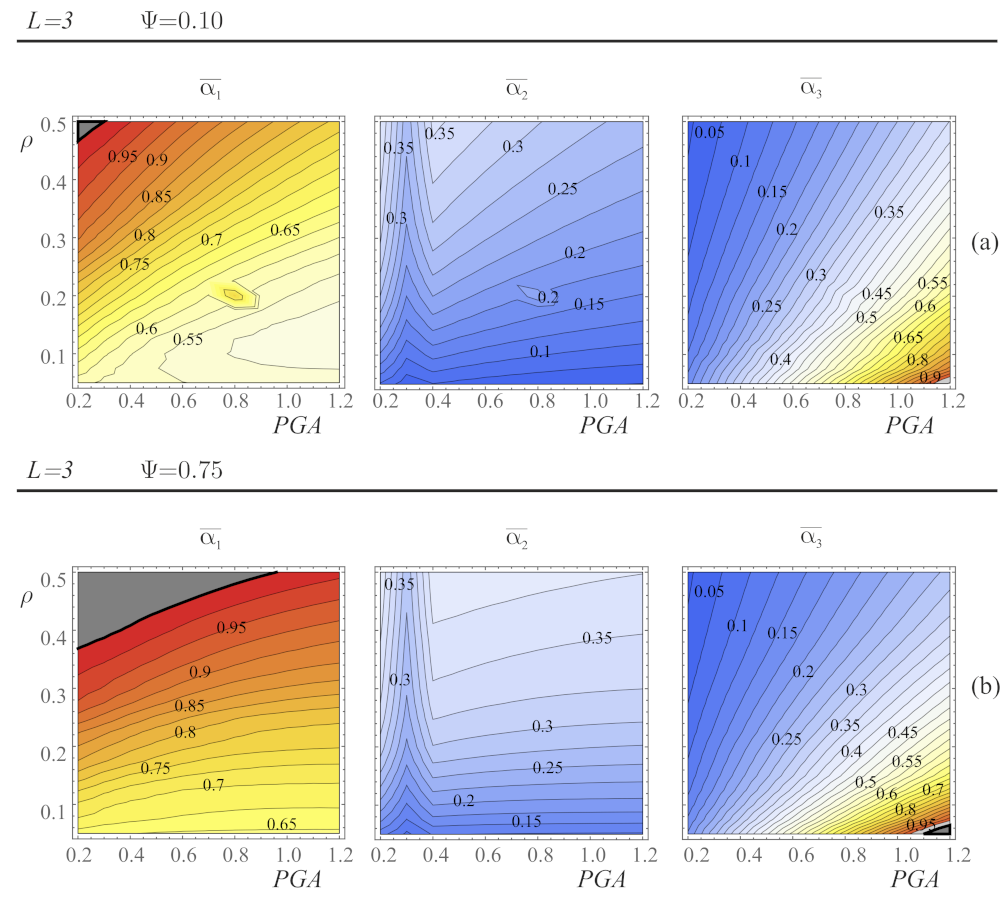
4.2. Gain Maps Obtained from Multiple Seismic Records
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kelly, J. Base isolation: Linear theory and design. Earthq. Spectra 1995, 6, 223–244. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Mechanical Vibrations, 4th ed.; McGraw-Hill: New York, NY, USA, 1956. [Google Scholar]
- Tsai, H.H. The effect of tuned-mass dampers on the seismic response of base-isolated structures. Int. J. Solids Struct. 1995, 32, 1195–1210. [Google Scholar] [CrossRef]
- Taniguchi, T.; Kiureghian, A.D.; Melkumyan, M. Effect of tuned mass damper on displacement demand of base-isolated structures. Eng. Struct. 2008, 30, 3478–3488. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. An enhanced base isolation system equipped with optimal Tuned Mass Damper Inerter (TMDI). Earthq. Eng. Struct. Dyn. 2018, 47, 1169–1192. [Google Scholar] [CrossRef]
- Giaralis, A.; Taflanidis, A. Optimal tuned mass-damper-inerter (TMDI) design for seismically excited MDOF structures with model uncertainties based on reliability criteria. Struct. Control Health Monit. 2018, 25, e2082. [Google Scholar] [CrossRef]
- De Angelis, M.; Perno, S.; Reggio, A. Dynamic response and optimal design of structures with large mass ratio TMD. Earthq. Eng. Struct. Dyn. 2012, 41, 41–60. [Google Scholar] [CrossRef]
- Chey, M.; Chase, J.; Mander, J.B.; Carr, A. Innovative seismic retrofitting strategy of added stories isolation system. Front. Struct. Civ. Eng. 2013, 7, 13–23. [Google Scholar] [CrossRef]
- Wang, S.J.; Chang, K.C.; Hwang, J.S.; Lee, B.H. Simplified analysis of mid-story seismically isolated buildings. Earthq. Eng. Struct. Dyn. 2011, 40, 119–133. [Google Scholar] [CrossRef]
- Wang, S.J.; Chang, K.C.; Hwang, J.S.; Hsiao, J.Y.; Lee, B.H.; Hung, Y.C. Dynamic behavior of a building structure tested with base and mid-story isolation systems. Eng. Struct. 2012, 42, 420–433. [Google Scholar] [CrossRef]
- Wang, S.J.; Hwang, J.S.; Chang, K.C.; Lin, M.H.; Lee, B.H. Analytical and experimental studies on midstory isolated buildings with modal coupling effect. Earthq. Eng. Struct. Dyn. 2013, 42, 201–219. [Google Scholar] [CrossRef]
- Villaverde, R.; Mosqueda, G. Aseismic roof isolation system: Analytic and shake table studies. Earthq. Eng. Struct. Dyn. 1999, 28, 217–234. [Google Scholar] [CrossRef]
- Villaverde, R.; Aguirre, M.; Hamilton, C. Aseismic Roof Isolation System Built with Steel Oval Elements. Earthq. Spectra 2005, 21, 225–241. [Google Scholar] [CrossRef]
- Matta, E.; De Stefano, A. Robust design of mass-uncertain rolling-pendulum TMDs for the seismic protection of buildings. Mech. Syst. Signal Process. 2009, 23, 127–147. [Google Scholar] [CrossRef]
- Feng, M.; Mita, A. Vibration Control of Tall Buildings Using Mega SubConfiguration. J. Eng. Mech. 1995, 121, 1082–1088. [Google Scholar] [CrossRef]
- Sadek, F.; Mohraz, B.; Taylor, A.W.; Chung, R.M. A method of estimating the parameters of tuned mass dampers for seismic applications. Earthq. Eng. Struct. Dyn. 1997, 26, 617–635. [Google Scholar] [CrossRef]
- Anajafi, H.; Medina, R. Comparison of the seismic performance of a partial mass isolation technique with conventional TMD and base-isolation systems under broad-band and narrow-band excitations. Eng. Struct. 2018, 158, 110–123. [Google Scholar] [CrossRef]
- Rana, R.; Soong, T. Parametric analysis and simplified design of tuned mass damper. Eng. Struct. 1998, 20, 193–204. [Google Scholar] [CrossRef]
- Miranda, J.C. On tuned mass dampers for reducing the seismic response of structures. Earthq. Eng. Struct. Dyn. 2005, 34, 847–865. [Google Scholar] [CrossRef]
- Fabrizio, C.; Di Egidio, A.; de Leo, A. Top disconnection versus base disconnection in structures subjected to harmonic base excitation. Eng. Struct. 2017, 152, 660–670. [Google Scholar] [CrossRef]
- Fabrizio, C.; de Leo, A.; Di Egidio, A. Tuned mass damper and base isolation: A unitary approach for the seismic protection of conventional frame structures. J. Eng. Mech. 2019, 145, 04019011. [Google Scholar] [CrossRef]
- Reggio, A.; De Angelis, M. Optimal energy-based seismic design of non-conventional Tuned Mass Damper (TMD) implemented via inter-story isolation. Earthq. Eng. Struct. Dyn. 2015, 44, 1623–1642. [Google Scholar] [CrossRef]
- Pagliaro, S.; Di Egidio, A. Archetype Dynamically Equivalent 3-DOF Model to Evaluate Seismic Performances of Intermediate Discontinuity in Frame Structures. J. Eng. Mech. 2022, 148, 04022004. [Google Scholar] [CrossRef]
- De Domenico, D.; Ricciardi, G. Optimal design and seismic performance of tuned mass damper inerter (TMDI) for structures with nonlinear base isolation systems. Earthq. Eng. Struct. Dyn. 2018, 47, 2539–2560. [Google Scholar]
- Wang, S.J.; Lin, M.H.; Chiang, Y.S.; Hwang, J.S. Mechanical behavior of lead rubber bearings under and after nonproportional plane loading. Earthq. Eng. Struct. Dyn. 2019, 48, 1508–1531. [Google Scholar] [CrossRef]
- Song, J.; Der Kiureghian, A. Generalized Bouc-Wen model for highly asymmetric hysteresis. J. Eng. Mech. 2006, 132, 610–618. [Google Scholar] [CrossRef]
- Aloisio, A.; Alaggio, R.; Kohler, J.; Fragiacomo, M. Extension of Generalized Bouc-Wen Hysteresis Modeling of Wood Joints and Structural Systems. J. Eng. Mech. 2020, 146, 04020001. [Google Scholar] [CrossRef]
- Wen, Y.K. Method for random vibration of hysteretic systems. J. Eng. Mech. 1976, 102, 249–263. [Google Scholar] [CrossRef]
- Charalampakis, A. Parameters of Bouc-Wen hysteretic model revisited. In Proceedings of the 9th HSTAM International Congress on Mechanics, Limassol, Cyprus, 12–14 July 2010. [Google Scholar]
- Ma, F.; Zhang, H.; Bockstedte, A.; Foliente, G.; Paevere, P. Parameter Analysis of the Differential Model of Hysteresis. J. Eng. Mech. 2004, 71, 342–349. [Google Scholar] [CrossRef]
- Constantinou, M.; Adnane, M. Dynamics of Soil-Base-Isolated Structure Systems: Evaluation of Two Models for Yielding Systems; Report to NSAF; Department of Civil Engineering, Drexel University: Philadelphia, PA, USA, 1987. [Google Scholar]
- Pacific Earthquake Engineering Research Center (PEER). Strong Ground Motion Database. Available online: https://peer.berkeley.edu. (accessed on 6 November 2021).
- Ziyaeifar, M.; Noguchi, H. Partial Mass Isolation in Tall Buildings. Earthq. Eng. Struct. Dyn. 1998, 27, 49–65. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| L | [kg ] | [kg ] | [kg ] | [kN/m] | [kN/m] |
|---|---|---|---|---|---|
| 1 | 301.5 | 150.75 | 1507.50 | 602,403 | 182,552 |
| 2 | 603.0 | 425.25 | 1206.00 | 292,175 | 208,839 |
| 3 | 904.5 | 735.75 | 904.50 | 207,567 | 250,374 |
| 4 | 1206 | 1055.25 | 603.00 | 177,681 | 324,132 |
| 5 | 1507.5 | 1356.75 | 301.50 | 167,962 | 476,779 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Di Egidio, A.; Pagliaro, S.; Contento, A. Seismic Performance of Frame Structure with Hysteretic Intermediate Discontinuity. Appl. Sci. 2023, 13, 5373. https://doi.org/10.3390/app13095373
Di Egidio A, Pagliaro S, Contento A. Seismic Performance of Frame Structure with Hysteretic Intermediate Discontinuity. Applied Sciences. 2023; 13(9):5373. https://doi.org/10.3390/app13095373
Chicago/Turabian StyleDi Egidio, Angelo, Stefano Pagliaro, and Alessandro Contento. 2023. "Seismic Performance of Frame Structure with Hysteretic Intermediate Discontinuity" Applied Sciences 13, no. 9: 5373. https://doi.org/10.3390/app13095373