
Research on Underwater Wireless Optical Communication Channel Model and Its Application

Abstract
:1. Introduction
2. Modeling of the Communication Channel of UWOC
2.1. Analysis of Communication Range in UWOC
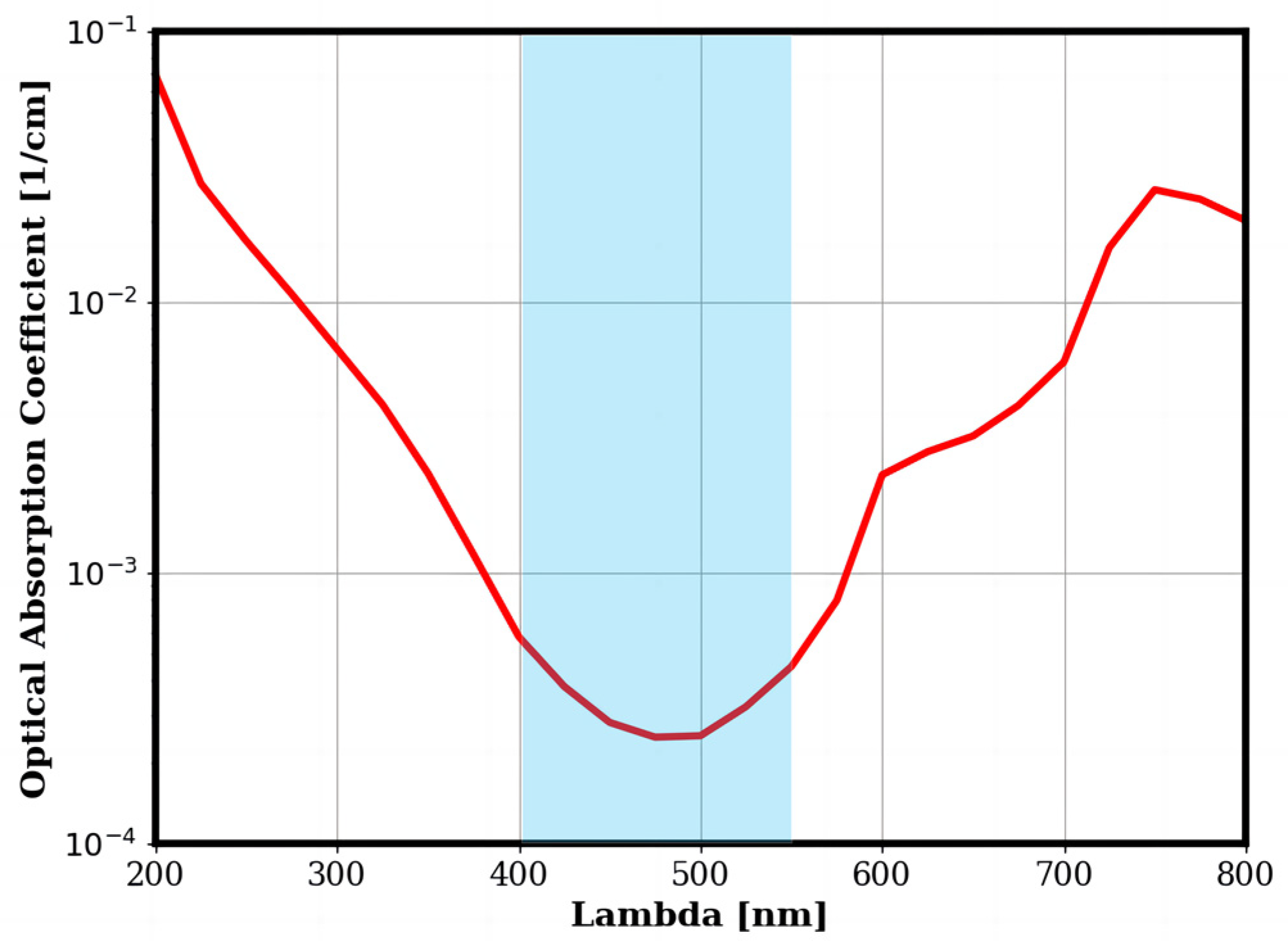
2.1.1. Absorption Model
2.1.2. Scattering Model
2.1.3. Communication Range Model of UWOC
- is the initial transmitting power at the transmitting terminal;
- is the optical power received by the light-sensitive component at the receiving terminal;
- , as explained above, is the electrical-to-optical conversion loss of the transmitter;
- reflects the efficiency of the receiver in converting incoming optical signals back into electrical signals;
- is geometry loss, which is inversely proportional to the square of the communication range [17];
- is the attenuation coefficient of the transmission channels of seawater, which can be expressed as the sum of the absorption and scattering effects, yielding the equation,where is the range between the transmitter and the receiver of optical communication. Upon analyzing the aforementioned equation, it is evident that the range between the transmitter and receiver, as well as the water quality, significantly impacts the received signal power. As the range and water quality attenuation coefficient increase, the power received at the receiving end decreases, affecting the quality of UWOC.
2.2. Analysis of “Effective Communication Space” in UWOC
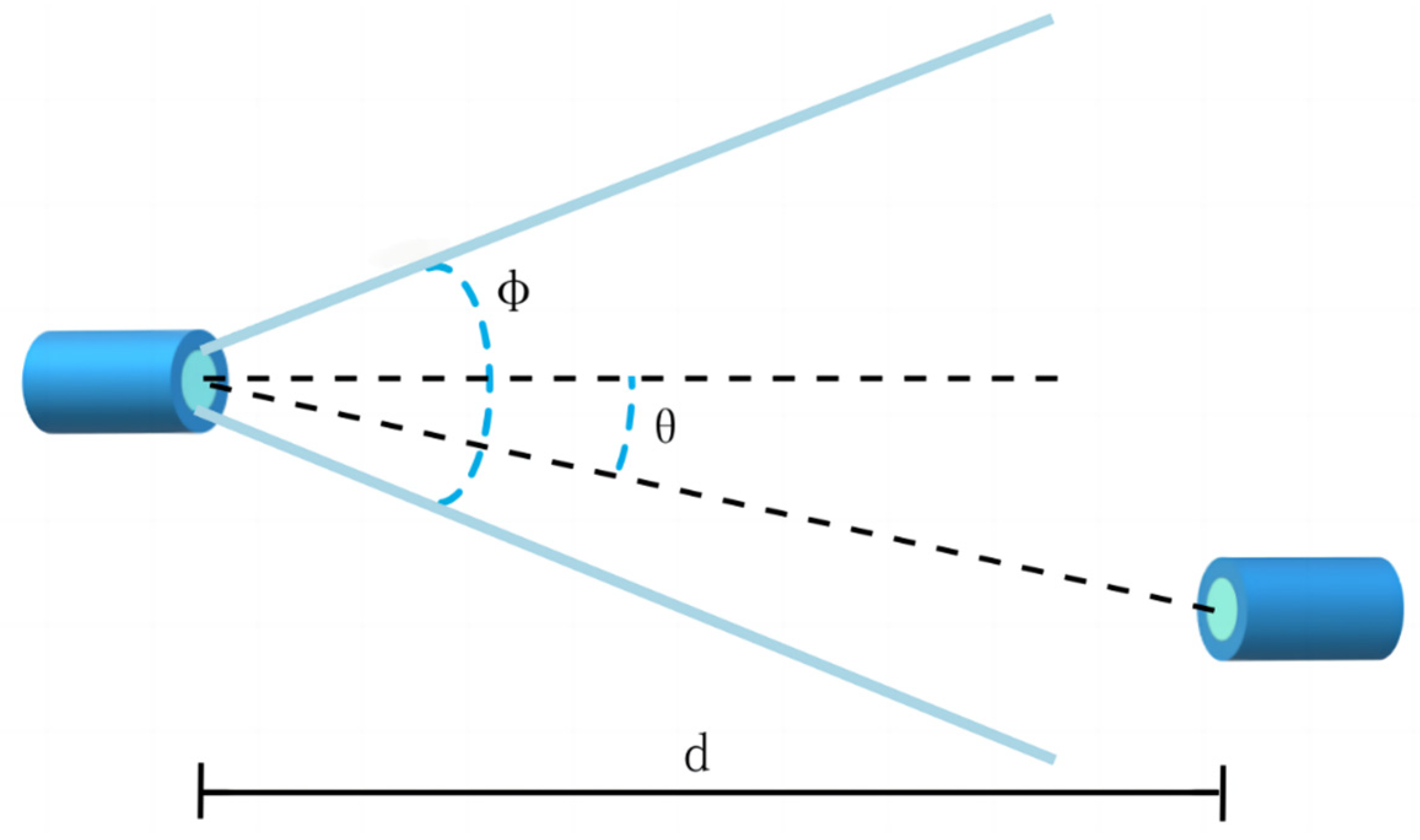
- Geometrical loss: Owing to the effects of diffraction, not all incident beams necessarily reach the receiving plane. Furthermore, even among the beams capable of reaching the receiving plane, some may fail to enter the photodetector due to the consideration of the receiving aperture’s dimensions. Thus, when exclusively accounting for beam divergence, the optical power received at the receiver’s end is the product of the optical power emitted at the transmitter’s end and the ratio of the receiving aperture area to the area of optical intensity in the receiver’s range. Consequently, this ratio represents the geometric loss caused by system geometric factors.
- Multipath Effect: When light is emitted from a transmitter and travels towards a receiver, a portion of the light follows the direct path (the minimum-distance path). However, varying amounts of energy are reflected from objects such as the water surface, seabed, and fish. These reflections cover longer ranges to reach the receiver, resulting in a delay phenomenon. Specifically, we aim to identify the most detrimental light path in terms of delay. The propagation velocity of light in a body of water is 2.25 × 108 m/s. When transmitting an optical signal in water at a frequency of 10 MHz, which corresponds to a symbol duration of 100 ns, the multipath effect of the preceding signal extends up to a range of 22.5 m before two adjacent pulses completely overlap at the receiver. Beyond this transmission range, the optical signal is significantly attenuated and does not cause significant interference. Hence, we opt to disregard the multipath effect for communication speeds below 10 Mb/s [18].
3. Underwater Optical Wireless Communication Experiment
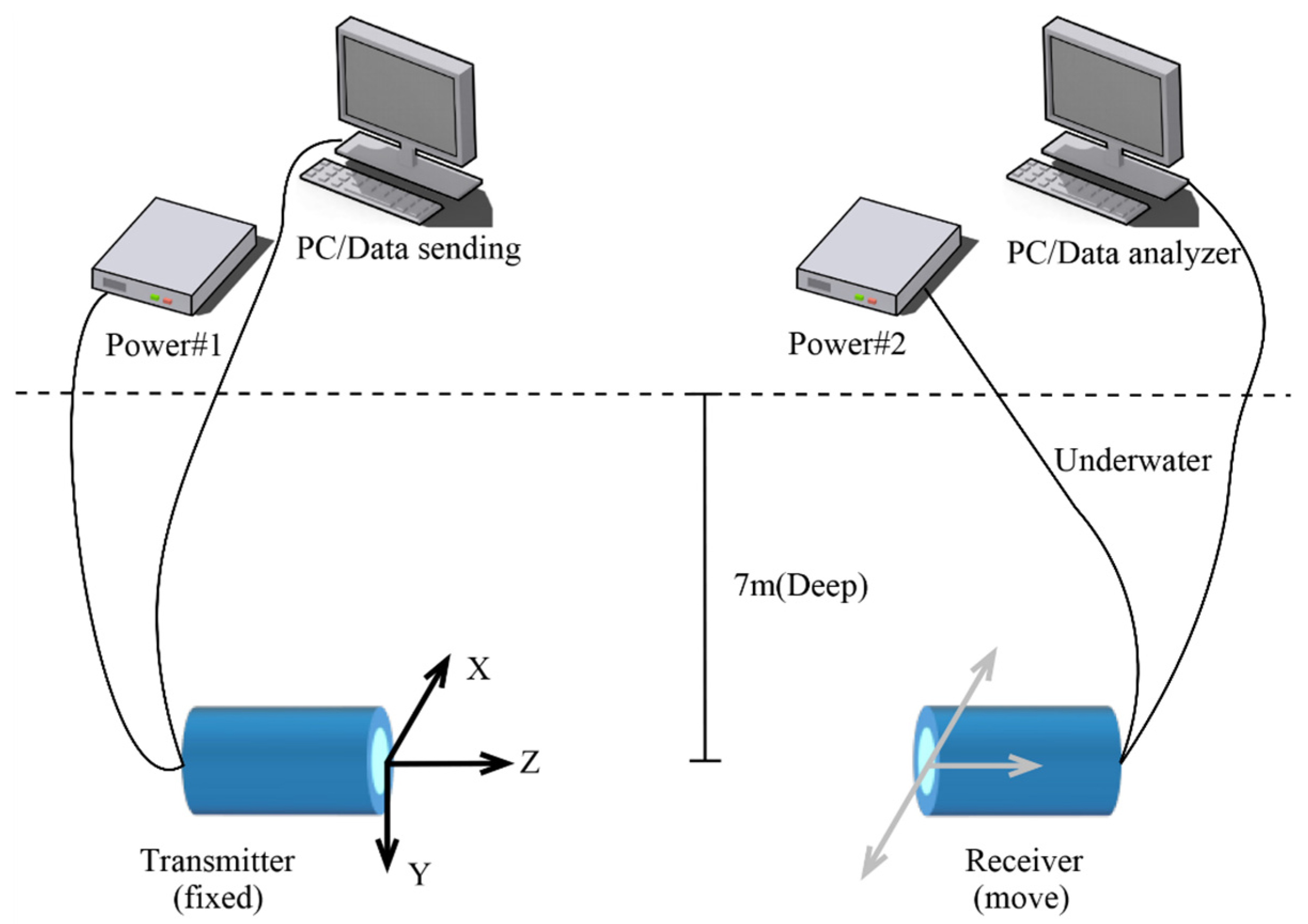
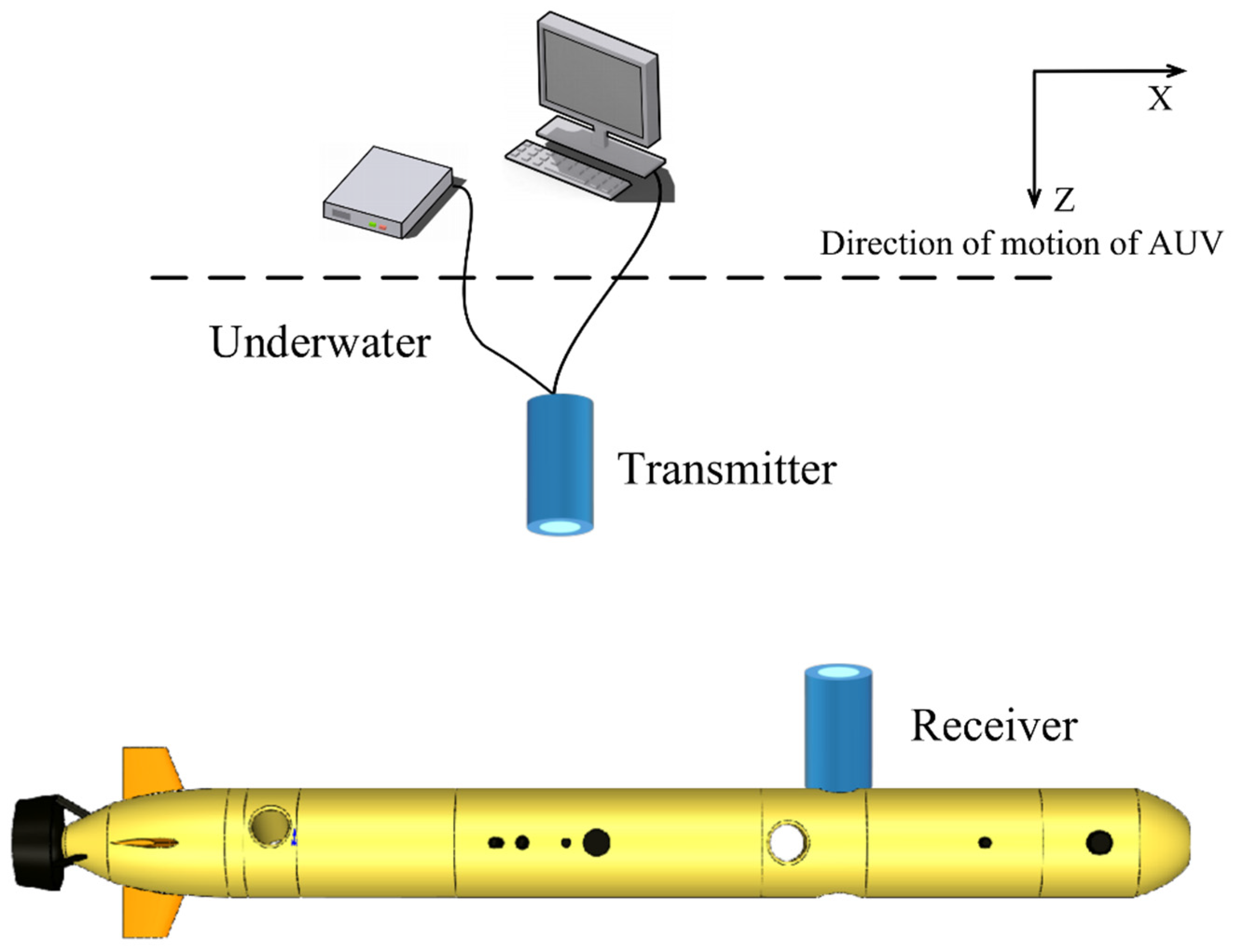
3.1. Experimental Setup
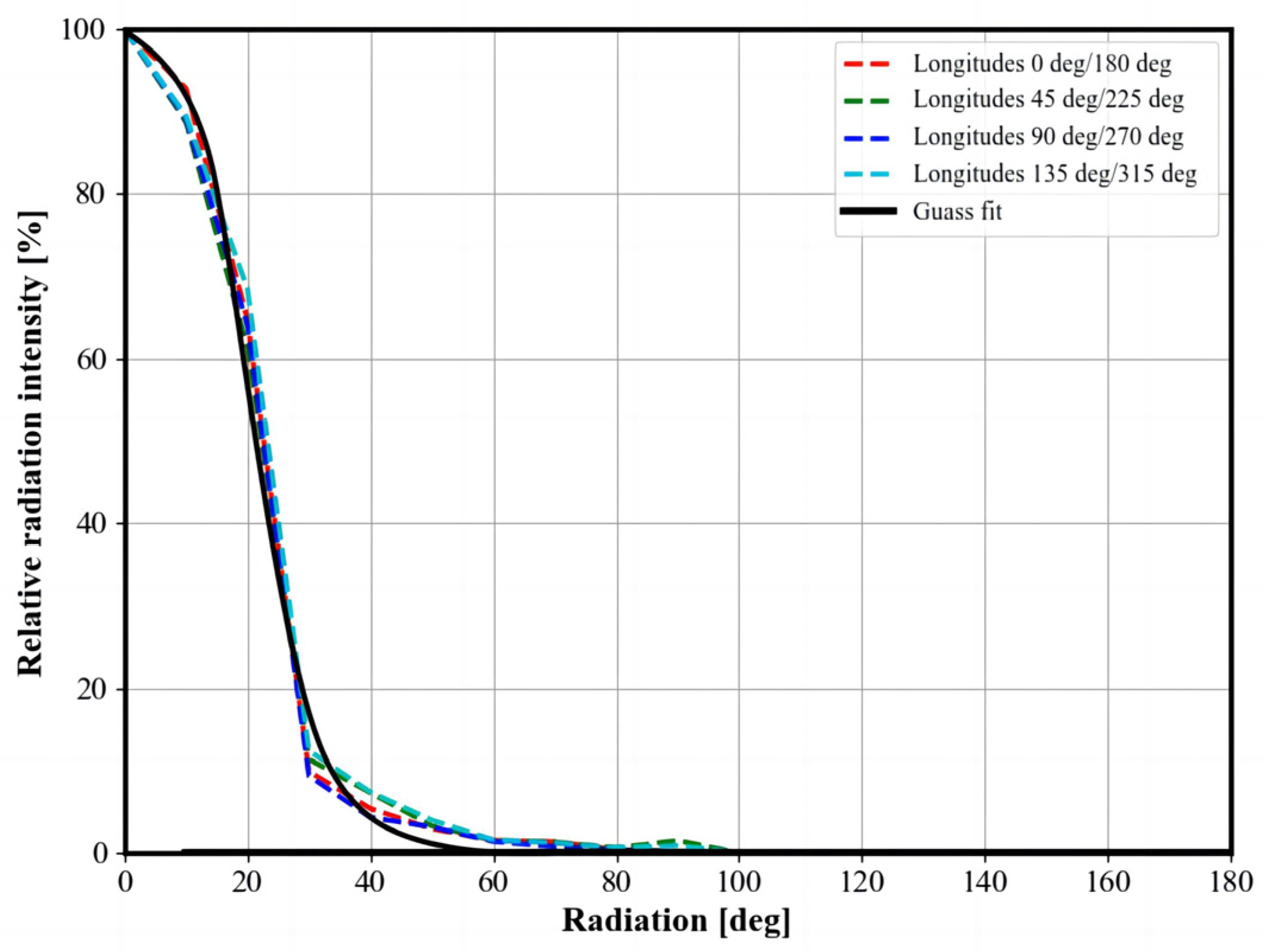
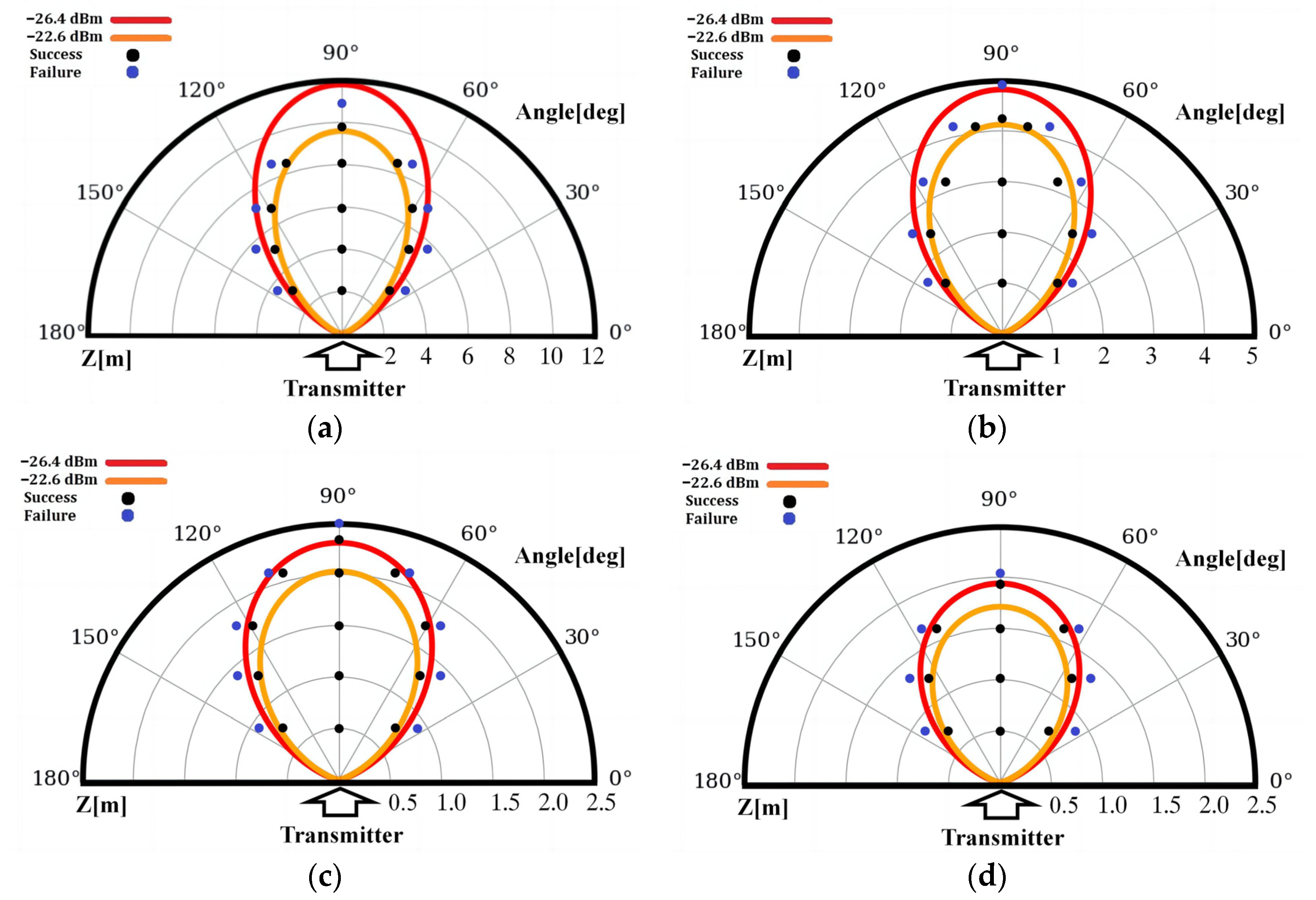
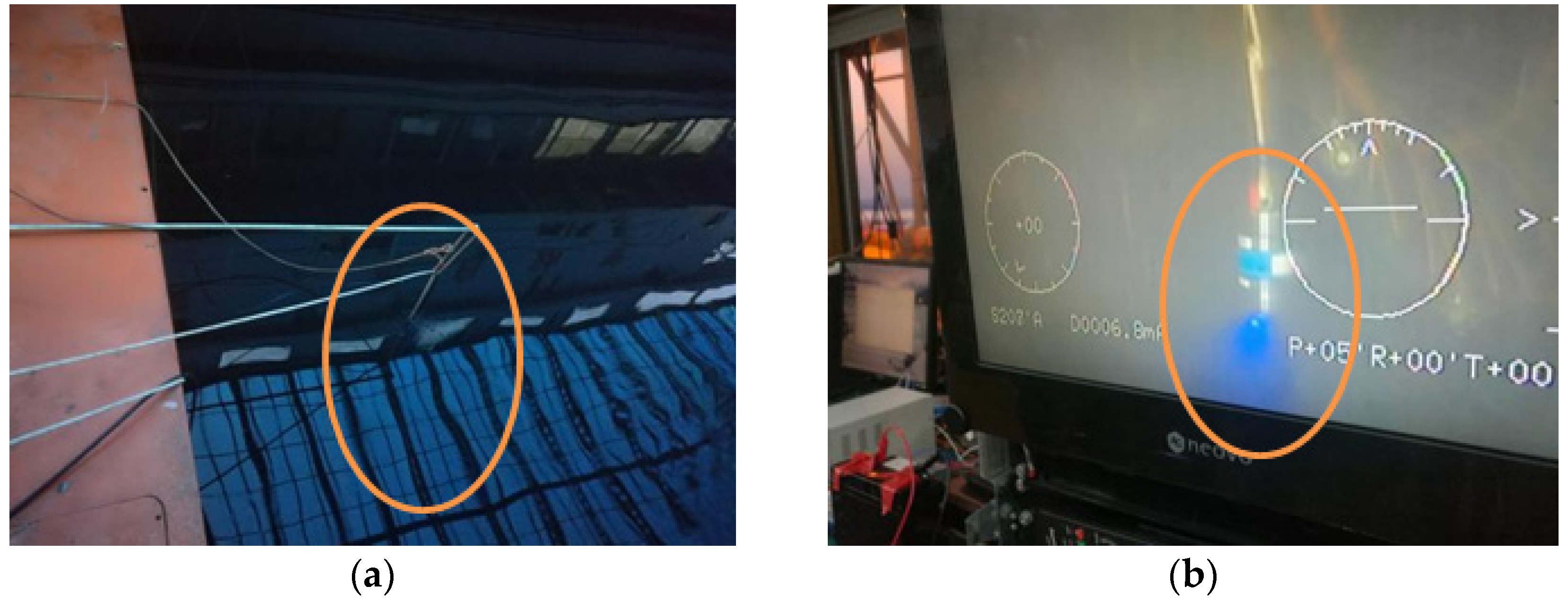
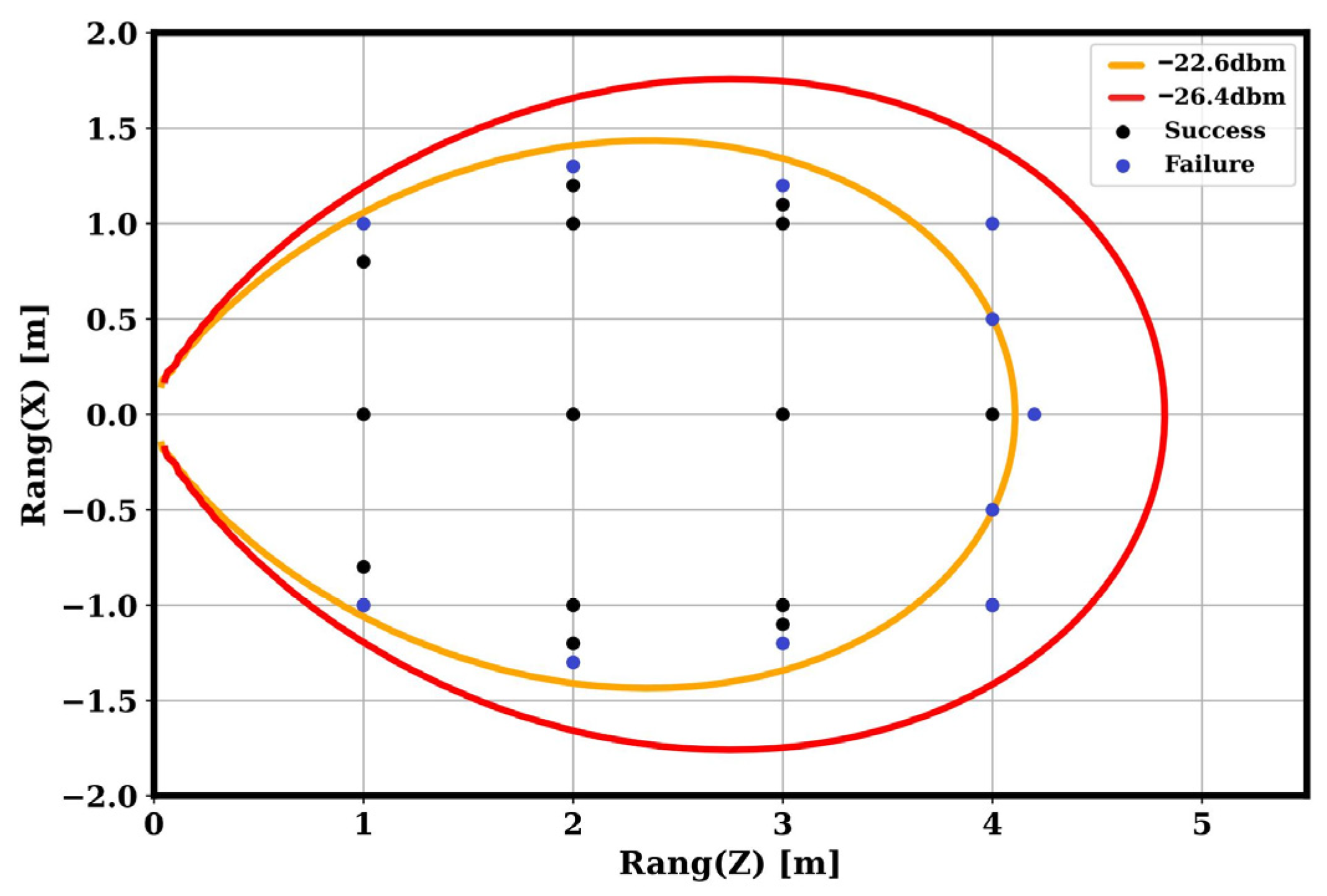
3.2. Experimental Results and Discussion
4. Application of Underwater Optical Wireless Communication
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zeng, Z.; Fu, S.; Zhang, H.; Dong, Y.; Cheng, J. A Survey of Underwater Optical Wireless Communications. IEEE Commun. Surv. Tutorials 2017, 19, 204–238. [Google Scholar] [CrossRef]
- Fei, C.; Hong, X.; Zhang, G.; Du, J.; Gong, Y.; Evans, J.; He, S. 166 Gbps data rate for underwater wireless optical transmission with single laser diode achieved with discrete multi-tone and post nonlinear equalization. Opt. Express 2018, 26, 34060–34069. [Google Scholar] [CrossRef] [PubMed]
- Zhang, L.; Wang, Z.; Wei, Z.; Chen, C.; Wei, G.; Fu, H.Y.; Dong, Y. Towards a 20 Gbps multi-user bubble turbulent NOMA UOWC system with green and blue polarization multiplexing. Opt. Express 2020, 28, 31796–31807. [Google Scholar] [CrossRef] [PubMed]
- Hao, D.; Li, B.; Yang, Y.; He, F. Research on Transmission Characteristics of Underwater Wireless Optical Communication Channels. Autom. Instrum. 2021, 9, 21–24. [Google Scholar]
- Jaruwatanadilok, S. Underwater Wireless Optical Communication Channel Modeling and Performance Evaluation using Vector Radiative Transfer Theory. IEEE J. Sel. Areas Commun. 2008, 26, 1620–1627. [Google Scholar] [CrossRef]
- Gabriel, C.; Khalighi, M.-A.; Bourennane, S.; Léon, P.; Rigaud, V. Monte-Carlo-based channel characterization for underwater optical communication systems. J. Opt. Commun. Netw. 2013, 5, 1–12. [Google Scholar] [CrossRef]
- Tang, S.; Dong, Y.; Zhang, X. Impulse Response Modeling for Underwater Wireless Optical Communication Links. IEEE Trans. Commun. 2014, 62, 226–234. [Google Scholar] [CrossRef]
- Chen, J.; Zhao, L.; Jiang, M.; Wu, Z. Sherman-Morrison Formula Aided Adaptive Channel Estimation for Underwater Visible Light Communication with Fractionally-Sampled OFDM. IEEE Trans. Signal Process. 2020, 68, 2784–2798. [Google Scholar] [CrossRef]
- N’doye, I.; Zhang, D.; Alouini, M.S.; Laleg-Kirati, T.M. Laleg-Kirati. Establishing and Maintaining a Reliable Optical Wireless Communication in Underwater Environment. IEEE Access 2021, 9, 62519–62531. [Google Scholar] [CrossRef]
- Pal, A.; Campagnaro, F.; Ashraf, K.; Rahman, M.R.; Ashok, A.; Guo, H. Communication for Underwater Sensor Networks: A Comprehensive Summary. ACM Trans. Sen. Netw. 2023, 19, 1–44. [Google Scholar] [CrossRef]
- Weng, Y.; Matsuda, T.; Sekimori, Y.; Pajarinen, J.; Peters, J.; Maki, T. Establishment of line-of-sight optical links between autonomous underwater vehicles: Field experiment and performance validation. Appl. Ocean Res. 2022, 129, 103385. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, S. Research Development Concerning Yellow Substances in Seawater. J. Oceanogr. Huang Hai Bo Hai Seas 2008, 18, 89–92. [Google Scholar]
- Hansell, D.A.; Carlson, C.A. Biogeochemistry of Marine Dissolved Organic Matter; Academic Press: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Duntley, S.Q. Light in the Sea. JOSA 1963, 53, 214–233. [Google Scholar] [CrossRef]
- Smith, R.C.; Baker, K.S. Optical Properties of the Clearest Natural Waters (200–800 nm). Appl. Opt. 1981, 20, 177–184. [Google Scholar] [CrossRef] [PubMed]
- Ma, Y.; Lin, H.; Ai, Q.; Liang, M. Marine Red Tide Monitoring based on Biological Optical Algorithm. Acta Opt. Sin. 2009, 28, 7–11. [Google Scholar] [CrossRef]
- Han, B.; Yang, J.; Sun, K.; Sun, Y. Experimental demonstration of a transmitter with a 50° divergence angle, 50 Mbps rate, and 476 mW optical power for underwater wireless optical communication based on an engineered diffuser. Appl. Opt. 2022, 61, 3598–3603. [Google Scholar] [CrossRef] [PubMed]
- Doniec, M.; Angermann, M.; Rus, D. An End-to-End Signal Strength Model for Underwater Optical Communications. IEEE J. Ocean Eng. 2013, 38, 743–757. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, R.; Lin, B.; Yin, H. Multi-Degree-of-Freedom for Underwater Optical Wireless Communication with Improved Transmission Performance. J. Mar. Sci. Eng. 2023, 11, 48. [Google Scholar] [CrossRef]
- Cox, W.C.; Simpson, J.A.; Domizioli, C.P.; Muth, J.F.; Hughes, B.L. An underwater optical communication system implementing Reed-Solomon channel coding. In Proceedings of the Oceans Conference 2008, Kobe, Japan, 8–11 April 2008. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Optical Distance (mm) | Range (1/m) @400 nm | Range (1/m) @550 nm | Range (1/m) @700 nm |
|---|---|---|---|
| 50 | 0.2–46 | 0.2–50 | 0.2–50 |
| 100 | 0.1–23 | 0.1–25 | 0.1–25 |
| 150 | 0.07–15 | 0.07–17 | 0.07–17 |
| 250 | 0.04–9.2 | 0.04–10 | 0.04–10 |
| Parameters | Values |
|---|---|
| Light source | LED |
| Optical transmit power | 6 W (radiometric) |
| Optical wavelength | 450 nm (royal blue) |
| Emitter beam shape | 45° (half angle) |
| Receive beam shape | 45° (half angle) |
| Dimensions (length × diameter) | 264 × 128 mm |
| Receiver detector | Photomultiplier tube (PMT) |
| Receiving sensitivity | −24 dBm |
| Data rate | 1–5 Mbps |
| Number | Place | Attenuation Coefficient | Measured Max Communication Range (m) | Calculated Max Communication Range (m) | BER (Max Communication Range) |
|---|---|---|---|---|---|
| 1 | Pond | 0.24~0.82 | 9.8 | >20 | 3.05 × 10−5 |
| 2 | The Guanshan Lake | 2.2–2.8 | 4.2 | 4.02~5.00 | 3.12 × 10−5 |
| 3 | Benxi | 5.1–5.7 | 2.4 | 1.82~2.43 | 3.02 × 10−5 |
| 4 | The Qipan mountain (25 m from the shore) | 6.8–7.3 | 1.9 | 1.45~1.88 | 3.11 × 10−5 |
| 5 | The Qipan mountain (near the shore) | 10.2~10.6 | 1.7 | 0.94~1.12 | 3.20 × 10−5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, K.; Li, Y.; Han, Z. Research on Underwater Wireless Optical Communication Channel Model and Its Application. Appl. Sci. 2024, 14, 206. https://doi.org/10.3390/app14010206
Sun K, Li Y, Han Z. Research on Underwater Wireless Optical Communication Channel Model and Its Application. Applied Sciences. 2024; 14(1):206. https://doi.org/10.3390/app14010206
Chicago/Turabian StyleSun, Kai, Yiyang Li, and Zekai Han. 2024. "Research on Underwater Wireless Optical Communication Channel Model and Its Application" Applied Sciences 14, no. 1: 206. https://doi.org/10.3390/app14010206