
Research on the Positioning Method of Steel Belt Anchor Holes Applied in Coal Mine Underground
Abstract
:1. Introduction
2. Overall System Design
2.1. Hardware Platform Construction
2.2. System Control Core
2.3. System Software Design
2.4. FreeRTOS Introduction and Porting
- (1)
- System Initialization
- (2)
- Host Computer Communication Task
- (3)
- Data Collection Task
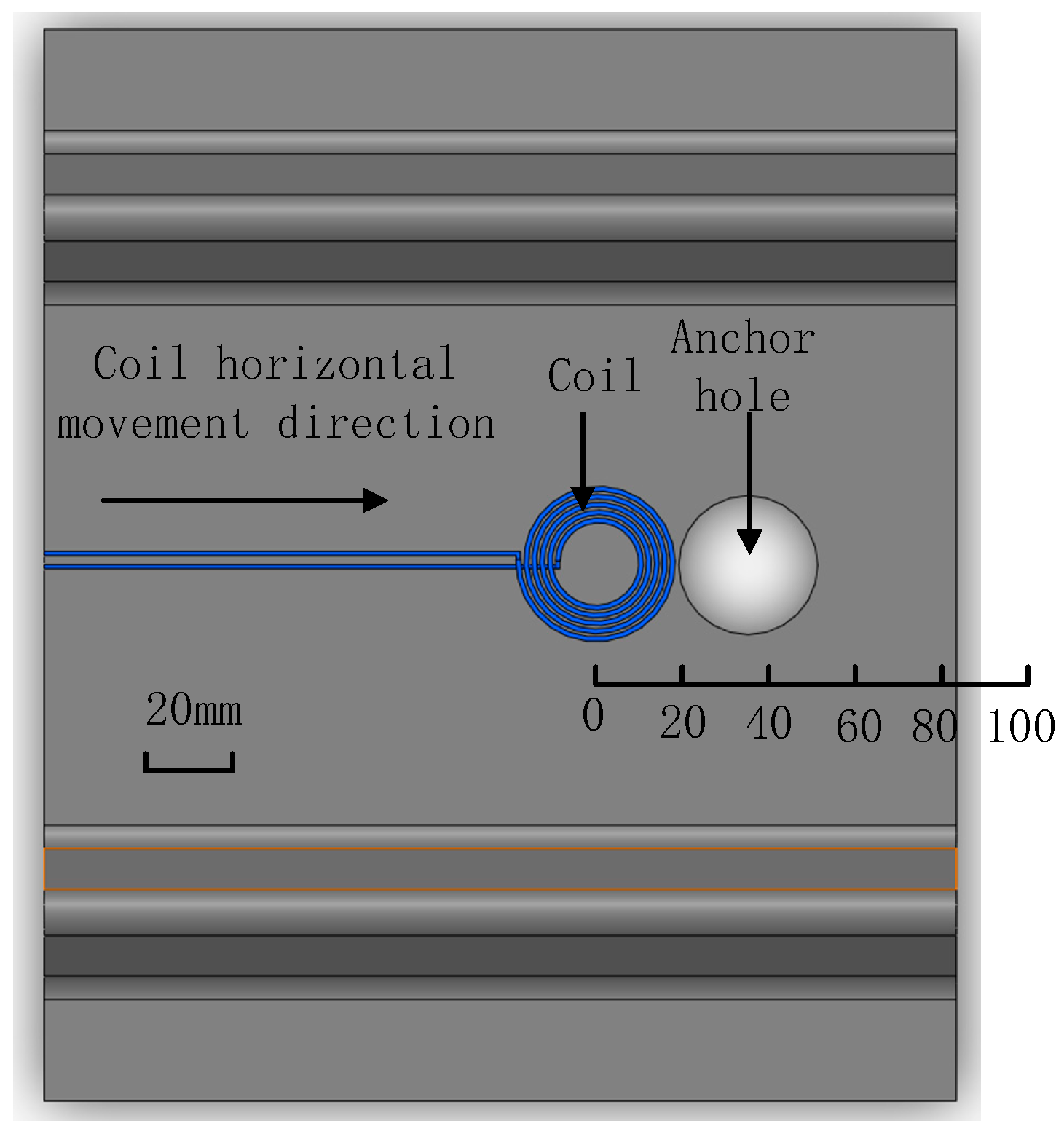
2.5. Platform Movement Detection
3. Coil Self-Inductance Simulation Analysis
4. Realization of Steel Belt Anchor Hole Positioning
4.1. Data Collection
4.2. Target Data Extraction
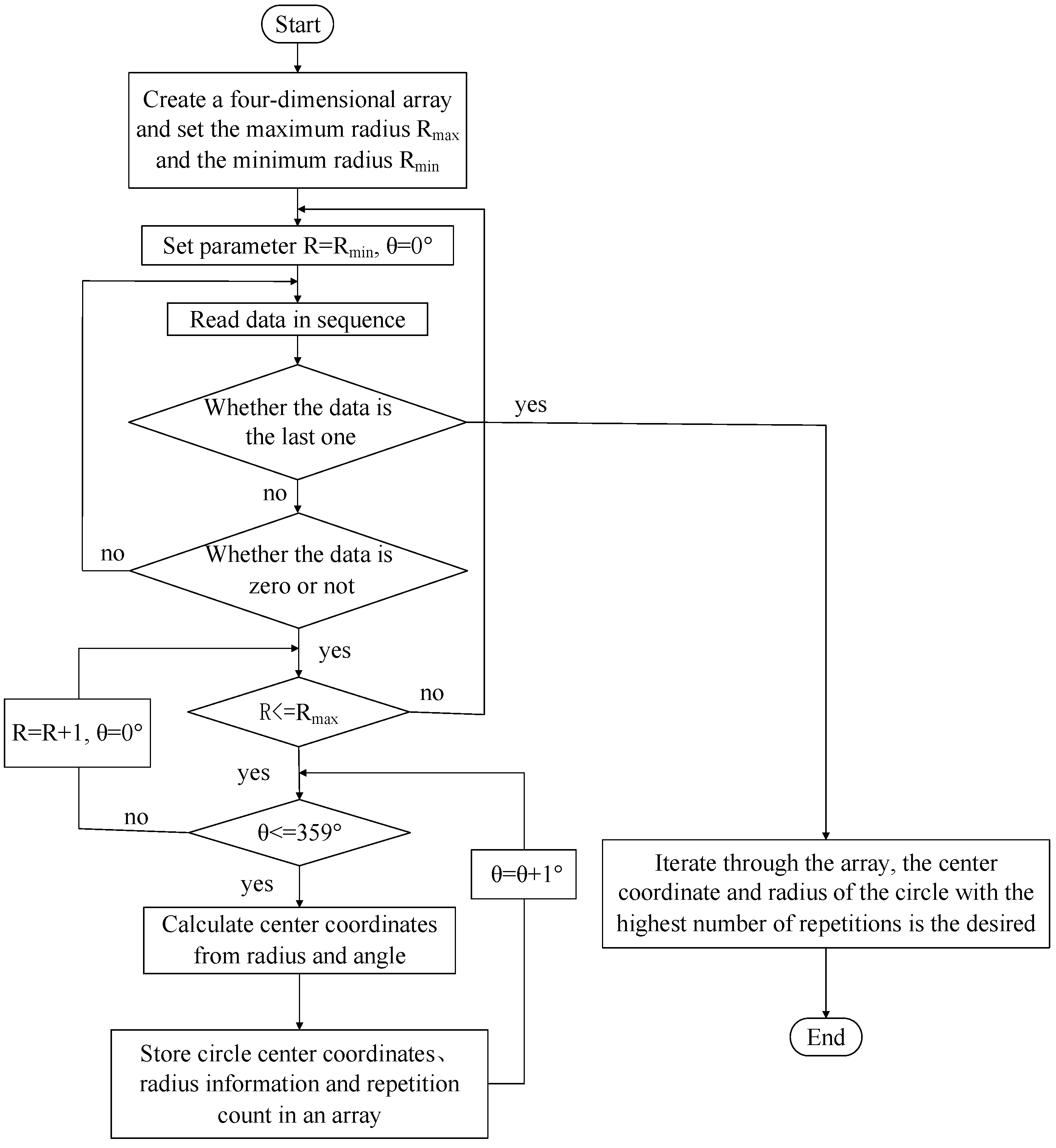
4.3. Positioning of the Anchor Holes
5. Experimental Section
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wang, B. Current situation and trend analysis of coal mine tunnel excavation technology and equipment. J. Coal Sci. Technol. 2020, 48, 1–11. [Google Scholar]
- Kang, H.; Wang, J.; Lin, J. Analysis of application cases of bolt support in coal mine tunnels. J. Rock Mech. Eng. 2010, 29, 649–664. [Google Scholar]
- Xue, G.; Cheng, J.; Guan, J.; Li, X.; Wu, M. Robotized advance support scheme and optimum support opportunity for deep fully mechanized roadway. J. Min. Sci. 2019, 4, 349–356. [Google Scholar]
- Zhang, F.; Wang, H.; Wang, H.; Li, Z.; Wang, Y. Intelligent identification and positioning of steel strip anchor holes for coal mine roadway support. J. Ind. Min. Autom. 2022, 48, 76–81. [Google Scholar]
- Wang, H.; Wang, B.; Zhang, X.; Li, F.; Du, C. Key technology and engineering practice of intelligent rapid heading in coal mine. J. China Coal Soc. 2021, 46, 2068–2083. [Google Scholar]
- Wang, G.; Pang, Y.; Ren, H. Intelligent mining mode and technical path for coal mines. J. Min. Rock Control. Eng. 2020, 2, 5–19. [Google Scholar]
- Wang, G.; Liu, F.; Pang, Y.; Ren, H.; Ma, Y. Coal mine intellectualization: The core technology of high quality development. J. China Coal Soc. 2019, 44, 349–357. [Google Scholar] [CrossRef]
- He, A.; Wu, L.; Du, S.; Han, F.; Liu, F. Development of a fully automatic two arm roof bolt drilling vehicle for coal mines. J. Coal Sci. Technol. 2019, 47, 165–169. [Google Scholar]
- Wu, H.; Liu, F.; Wang, S.; Xu, J.; Qiu, Z. Design of a four arm anchor rod drilling vehicle. J. Coal Min. Mach. 2011, 32, 23–25. [Google Scholar]
- Zhang, G. Research on the application of PLC based intelligent visualization control system for anchor drill. J. Mach. Tools Hydraul. 2018, 46, 129–132. [Google Scholar]
- Kang, H.; Jiang, P.; Liu, C.; Wang, Z.; Luo, C.; Guo, J.; Chen, Z.; Cao, X. Current situation and development trend of rock bolting construction equipment in coal roadway. J. Mine Autom. 2023, 49, 1–18. [Google Scholar]
- Gao, Z.; Guo, Z. Type characteristics and research direction of automatic bolting frame. J. Coal Sci. Technol. 2023, 51, 212–224. [Google Scholar]
- Qiao, J. Research on the identification of steel belt holes for underground anchoring operations in coal mines based on machine vision. Master’s Thesis, Coal Science Research Institute, Beijing, China, 2022. [Google Scholar]
- Ge, S.; Zhang, Y.; Qin, J.; Li, X.; Wang, X. A detection method for underground anchor holes in coal mines based on optimized SSD-MobileNetV2. J. Min. Rock Control. Eng. 2023, 5, 66–74. [Google Scholar]
- Lei, M.; Zhang, X.; Dong, Z.; Wan, J.; Zhang, C.; Zhang, G. Locating anchor drilling holes based on binocular vision in coal mine roadways. J. Math. 2023, 11, 4365. [Google Scholar] [CrossRef]
- Guo, Z.; Sasayama, T. Detection of Surface and Back-Surface Defects on Metal Plate via Rectangular Wave Eddy Current Testing Using Magnetoresistive Sensor. J. IEEE Trans. Magn. 2023, 59, 6200505. [Google Scholar] [CrossRef]
- Yuan, F.; Yu, Y.; Li, L.; Tian, G. Investigation of DC electromagnetic-based motion induced eddy current on NDT for crack detection. J. IEEE Sens. J. 2021, 21, 7449–7457. [Google Scholar] [CrossRef]
- Duan, Z.; Xie, S.; Li, L.; Li, J.; Chen, H.; Chen, Z. Detection of defects in pipeline structures based on magnetic transmission eddy current array probe. J. Trans. China Electrotech. Soc. 2020, 35, 4627–4635. [Google Scholar]
- Xiong, L.; Liu, X.; Zhang, Y.; Shi, Y.; Zhang, Y.; Chen, Z. Identification of High-Speed railway rail abrasions based on eddy current detection. J. Railw. Eng. 2022, 62, 8–12. [Google Scholar]
- Zhou, Y.; Ye, W.; Zhang, C.; Fu, J.; Liang, R. Study on influence factors of inductive sensor to identify scrap metal. J. Transducer Microsyst. Technol. 2023, 42, 17–20, 24. [Google Scholar]
- Xu, J.; Zhang, Y.; Yang, J.; Wang, Y. Vehicle Condition Monitoring System Based on FreeRTOS. J. Electron Devices 2021, 44, 439–443. [Google Scholar]
- Chen, R.; Zeng, Q.; Yang, J.; Xiong, D.; Li, S.; Su, L. AGV development based on FreeRTOS embedded system. J. Mach. Des. Res. 2022, 38, 35–41. [Google Scholar]
- Wang, D.; Mo, X. Design and Implementation Smart Home of Intelligent Lighting System Based on STM32 and HC-SR501. J. Chongqing Univ. Technol. (Nat. Sci.) 2016, 30, 135–142. [Google Scholar]
- Chen, D.; Wang, Y.; Jin, X. Design of experiment on DAC signal output based on STM32. J. Exp. Technol. Manag. 2019, 36, 72–75. [Google Scholar]
- Jiang, J.; Zeng, Z.; Fu, Y.; Zhan, E.; Long, D. MCR-WPT system simulation based on ANSYS Electronics Desktop/Maxwell3D. J. Chem. Autom. Instrum. 2021, 48, 634–639. [Google Scholar]
- Yu, L.; Kang, J.; Wang, N.; Shao, L. A new threshold segmentation method for cotton root images. J. Hebei Univ. (Nat. Sci. Ed.) 2022, 42, 124–130. [Google Scholar]
- Wang, Y.; Guo, Z.; Fang, C.; Yang, G.; Wang, Q.; Guo, X. Adaptive threshold-based recurrent pruning algorithm. J. Appl. Res. Comput. 2022, 39, 1467–1471, 1477. [Google Scholar]
- Hollitt, C. A convolution approach to the circle Hough transform for arbitrary radius. J. Mach. Vis. Appl. 2013, 24, 683–694. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Actual Coordinates/mm | Detecting Coordinates/mm | Error/mm |
|---|---|---|---|
| 1 | (670, 350) | (672, 351) | (2, 1) |
| 2 | (566, 395) | (568, 393) | (2, 2) |
| 3 | (645, 380) | (644, 382) | (1, 2) |
| 4 | (505, 355) | (507, 356) | (2, 1) |
| 5 | (510, 350) | (512, 348) | (2, 2) |
| 6 | (525, 360) | (523, 362) | (2, 2) |
| 7 | (508, 365) | (510, 367) | (2, 2) |
| 8 | (530, 370) | (528, 371) | (2, 1) |
| No. | Actual Coordinates/mm | Detecting Coordinates/mm | Error/mm |
|---|---|---|---|
| 1 | (680, 380) | (683, 382) | (3, 2) |
| 2 | (566, 400) | (565, 403) | (1, 3) |
| 3 | (615, 395) | (617, 393) | (2, 2) |
| 4 | (525, 370) | (528, 368) | (3, 2) |
| 5 | (572, 360) | (570, 362) | (2, 2) |
| 6 | (545, 375) | (548, 377) | (3, 2) |
| 7 | (570, 365) | (567, 367) | (3, 2) |
| 8 | (557, 374) | (559, 377) | (2, 3) |
| No. | Actual Coordinates/mm | Detecting Coordinates/mm | Error/mm |
|---|---|---|---|
| 1 | (690, 370) | (687, 372) | (3, 2) |
| 2 | (576, 405) | (579, 408) | (3, 3) |
| 3 | (654, 390) | (650, 392) | (4, 2) |
| 4 | (510, 330) | (512, 328) | (2, 2) |
| 5 | (530, 365) | (532, 368) | (2, 3) |
| 6 | (570, 375) | (567, 378) | (3, 3) |
| 7 | (610, 382) | (613, 380) | (3, 2) |
| 8 | (605, 395) | (602, 392) | (3, 3) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, J.; Wang, Y.; Wu, H.; Liu, G. Research on the Positioning Method of Steel Belt Anchor Holes Applied in Coal Mine Underground. Appl. Sci. 2024, 14, 4360. https://doi.org/10.3390/app14114360
Zeng J, Wang Y, Wu H, Liu G. Research on the Positioning Method of Steel Belt Anchor Holes Applied in Coal Mine Underground. Applied Sciences. 2024; 14(11):4360. https://doi.org/10.3390/app14114360
Chicago/Turabian StyleZeng, Jinsong, Yan Wang, Haotian Wu, and Guoning Liu. 2024. "Research on the Positioning Method of Steel Belt Anchor Holes Applied in Coal Mine Underground" Applied Sciences 14, no. 11: 4360. https://doi.org/10.3390/app14114360