
Vector-Based Advanced Computation for Photovoltaic Devices and Arrays: Numerical Reproduction of Unusual Behaviors of Curved Photovoltaic Devices


Abstract
:Featured Application
Abstract
1. Introduction
2. Methods
2.1. Impact of the Curved Surface
2.2. Impact of the Non-Uniform Solar Irradiance
2.3. Interaction between Curved Surfaces and Non-Uniform Solar Irradiance
2.4. Expression of Curved Surfaces of PVs
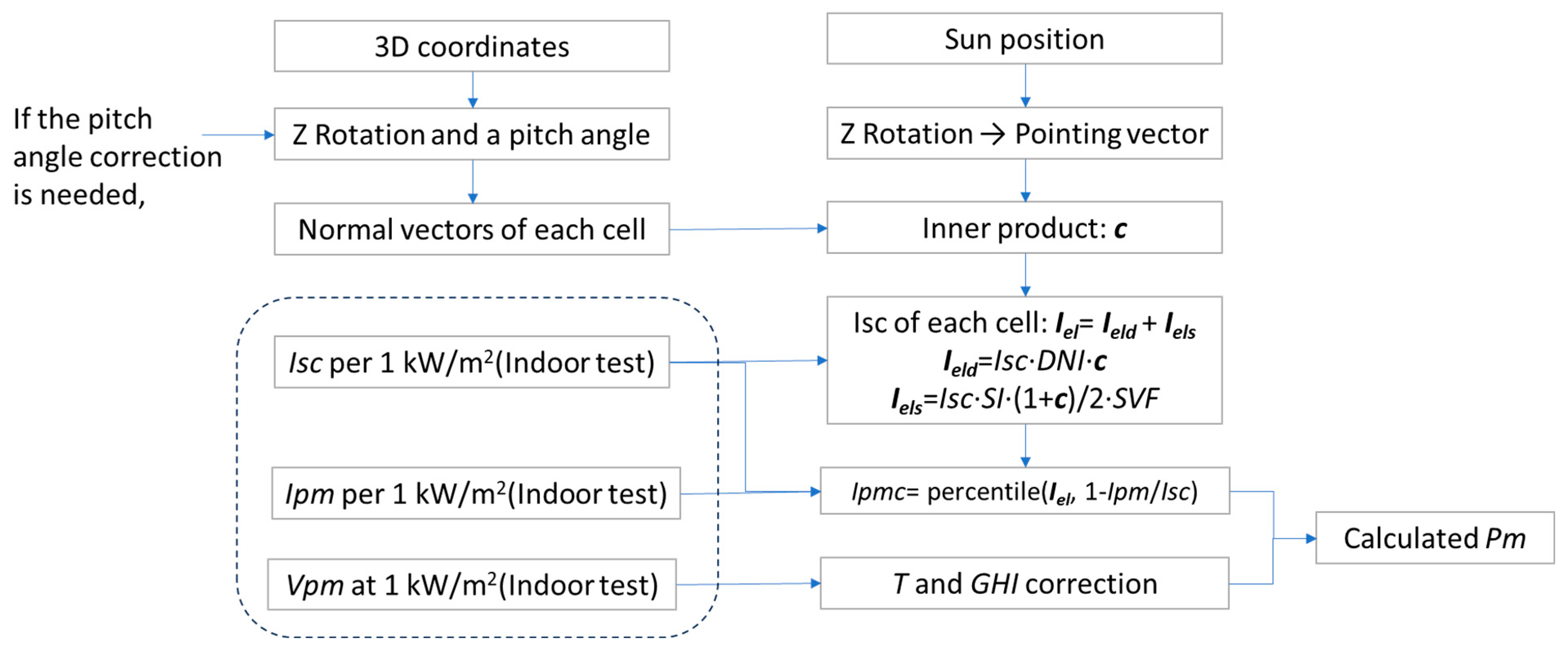
2.5. Simplified Calculation for VIPVs or Other Loosely Curved PV Devices
- The attitude and position remain constant during the timeframe of the power measurement.
- The solar irradiance angular distribution remains constant during the power measurement timeframe.
- All the solar cells are connected in series.
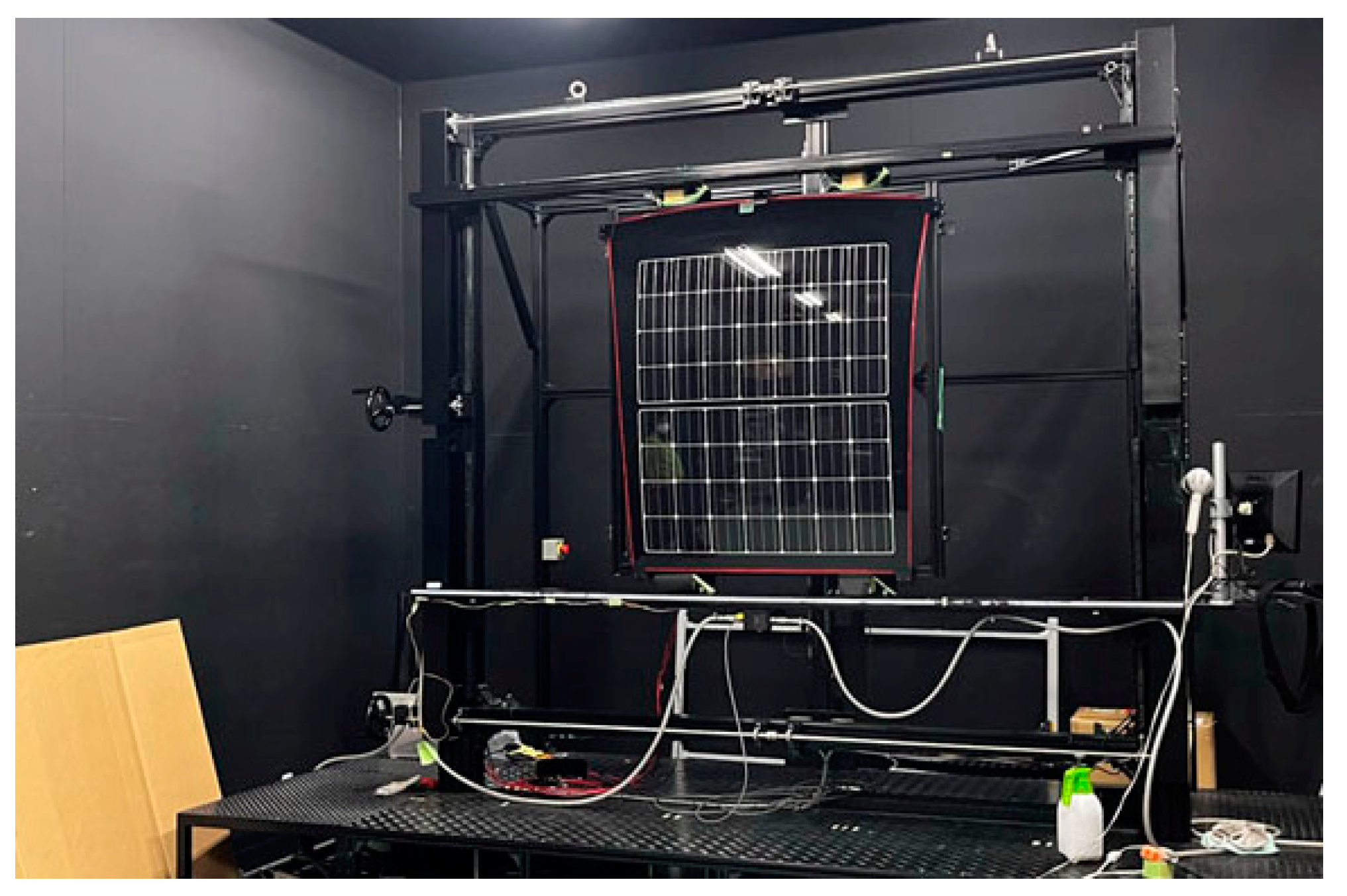
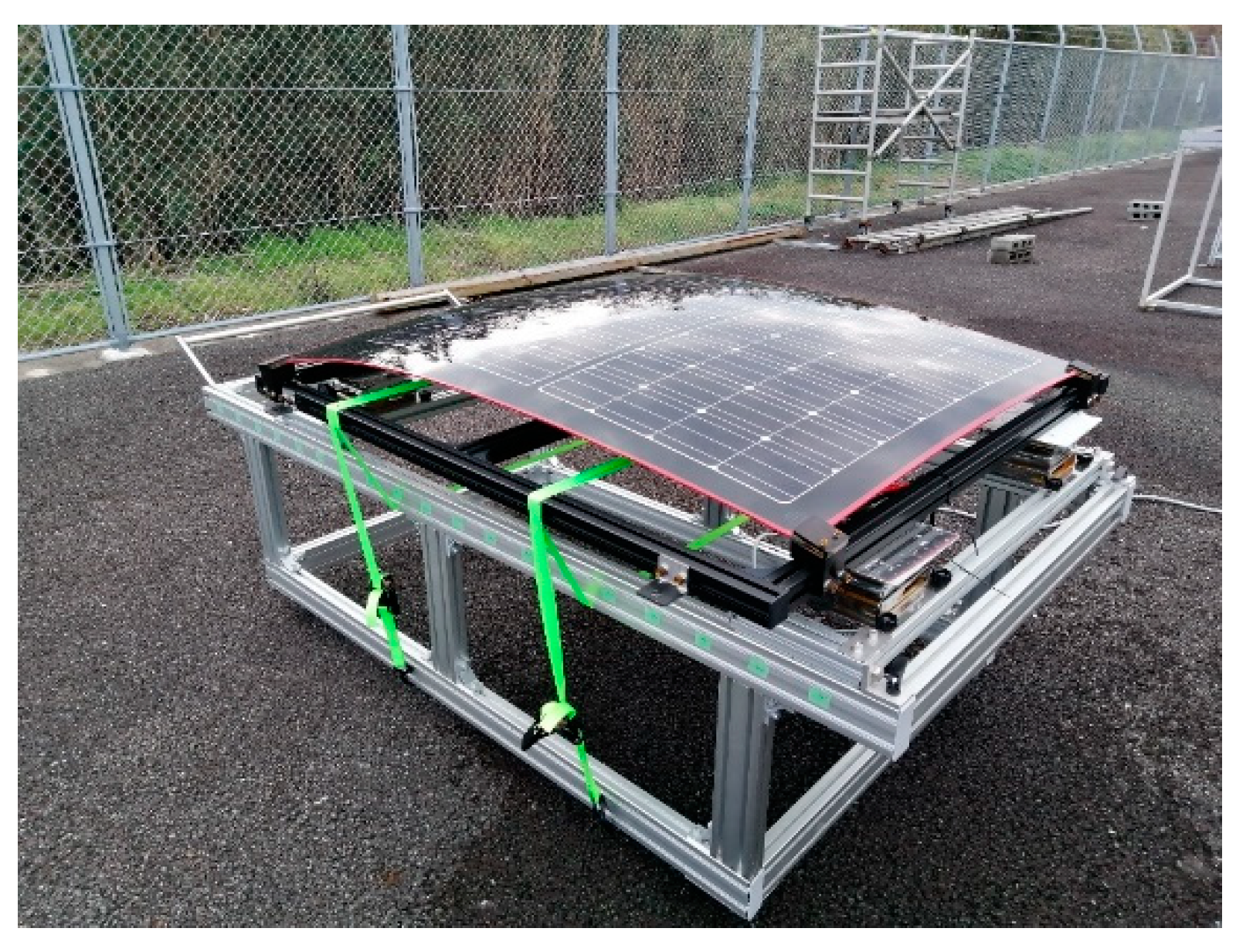
2.6. Curve-Shape Measurements and Indoor Tests
- The reference bottom surface (bracket or frame bottom surface) is flat across the bottom. As a criterion for assessment, it should be placed on a surface plate that is larger than the frame, and a force should be applied to at least three corners to ensure adequate tightness. The permissible deflection is 10 mm using a 100 N load force.
- The frame, bracket, and enveloping holder surfaces are outside the envelope surface of the module outline.
- At least three holders are provided to hold the modules.
- The holder’s height is lower than that of the neighboring cells.
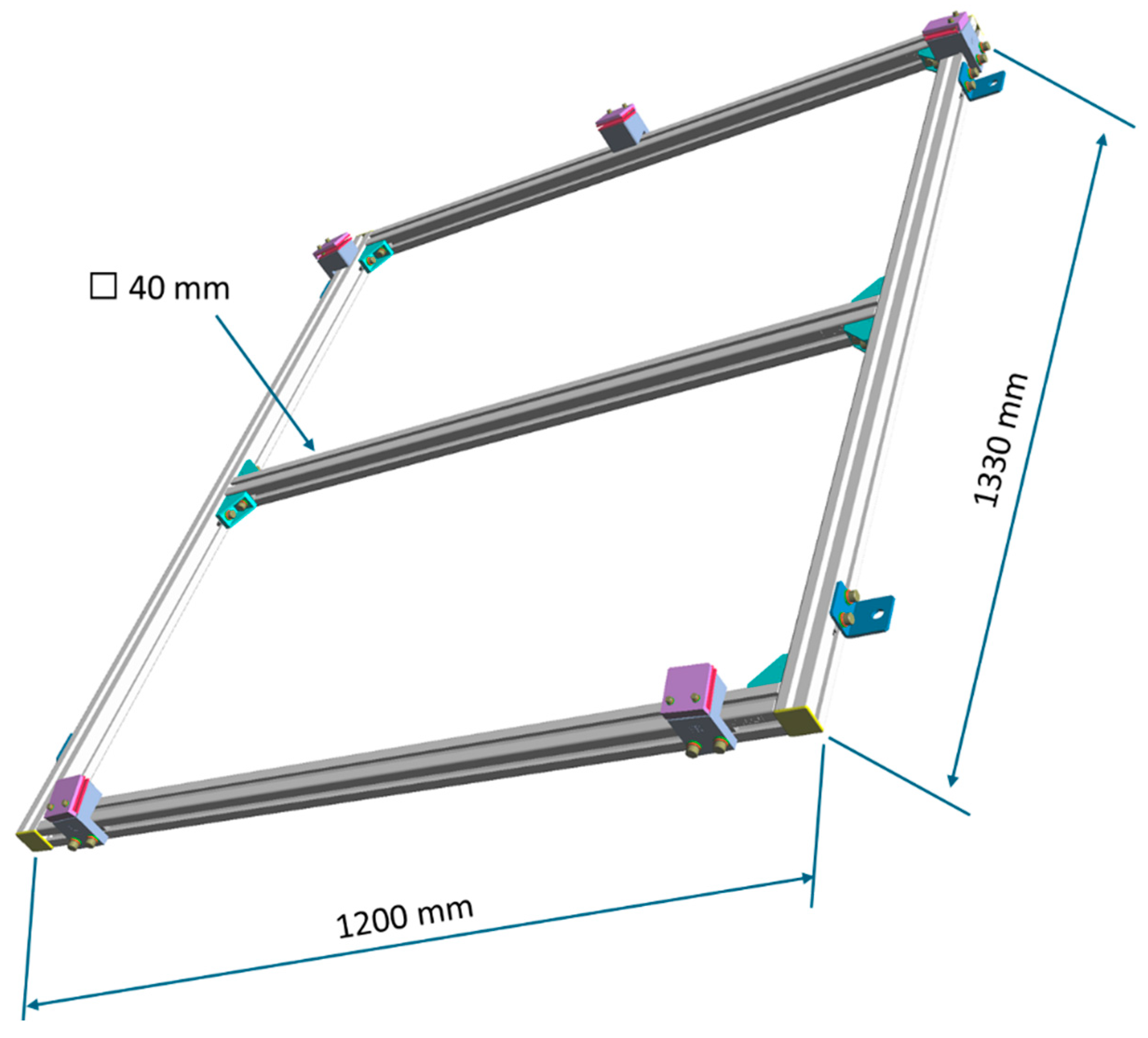
- To prevent module deformation (twisting) during fastening, all the holders have an angle-adjustment function to follow the variations in the curved surface shape (purple plates on the four corners and a center point of a side in Figure 3).
- The central tilt angle for the angle adjustment of the holder (Figure 3) is designed based on the aspects of the module. Specifically, the module is placed on a horizontal surface plate (there is no need to compensate for deflection owing to its weight). The angle of inclination of the edge of the module at the point where it is fixed with a holder is measured using a protractor or a small inclinometer. The center angle of the holder (14° in Figure 3) is determined according to the estimated value.
- To prevent the glass cover from cracking during fastening, the fastening part is sandwiched between 3 mm thick urethane plates. Furthermore, the fastening torque is controlled (e.g., 2-M4 fastening torque of 1 Nm).
- The surface viewed from the light-receiving surface is matte black in color. Any surface treatment method such as black alumite treatment, black dyeing, black chromate treatment, black nickel plating, or matte painting can be used. The surfaces concealed behind the module are not black. Non-black surfaces such as screw heads and machined surfaces may remain if these are negligible in terms of the projected area of the frame.
- The module is attached to a rail for convenience. For example, in a series of set operations such as removing the upper holding portion of the holder, placing the module, adjusting the position, and tightening the upper holding portion, the module does not slip or need to be held temporarily.
- Specifically, the frame is placed on the surface plate, the top is removed, a part of the holder is pressed, the module is enabled to stand, and the distance from the plate surface to the lower end of the module (mechanical contact plane) is set as an equal distance. The module is fine-tuned by shifting it in the x and y directions. After determining the position of the module, the angle-adjustment function of the holder is used to adjust the angle such that the supporting surfaces of the holder and module are approximately parallel. This is repeated two times to fix the module position and holder angle. Subsequently, the upper pressed portion is tightened using a specified tightening torque.
- The framed module is placed on a CMM surface plate (attached to the frame to prevent bending deformation).
- To verify the reference plane of the surface plate, a stylus is dropped on the surface plate near the four corners of the frame, and the height of the surface plate is measured (at four points; the Z value). Two points where the height of the surface plate is at the minimum and maximum are selected. The inclination of the line connecting the two points from the XY plane of the CMM coordinate system is calculated. No problems occur when the inclination is less than 0.1°.
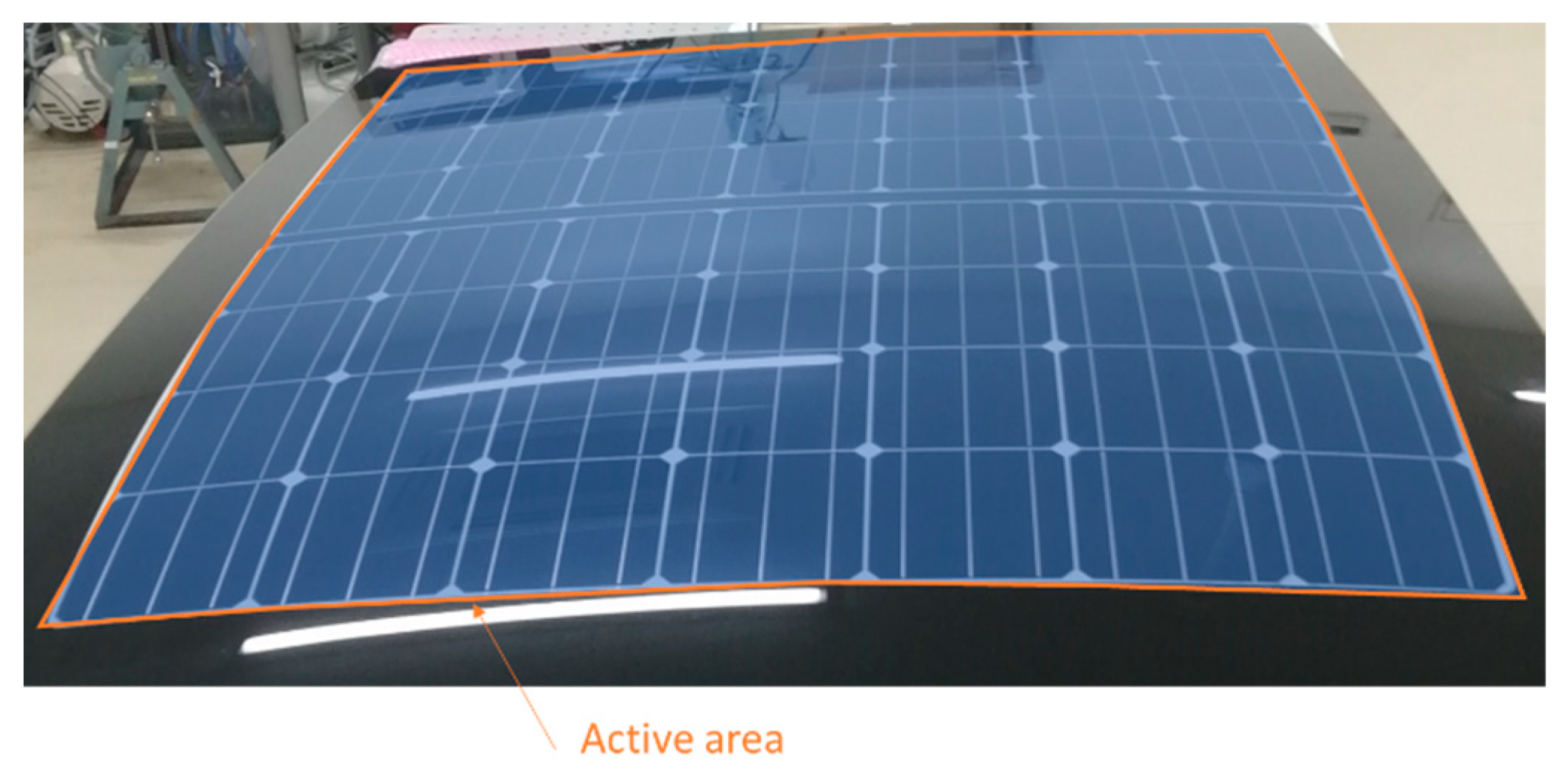
- The X- and Y-axes are defined with the vertex closest to the mechanical origin of the CMM as the origin within the envelope surface of the approximately rectangular area covered by the cell (Figure 4 and the active zone defined in Figure 5). In addition, the Z-axis in the vertical direction (upward) is considered, and the X-, Y-, and Z-axes are left-handed.
- The height is measured from the plate surface of the origin. Let this be dimension A.
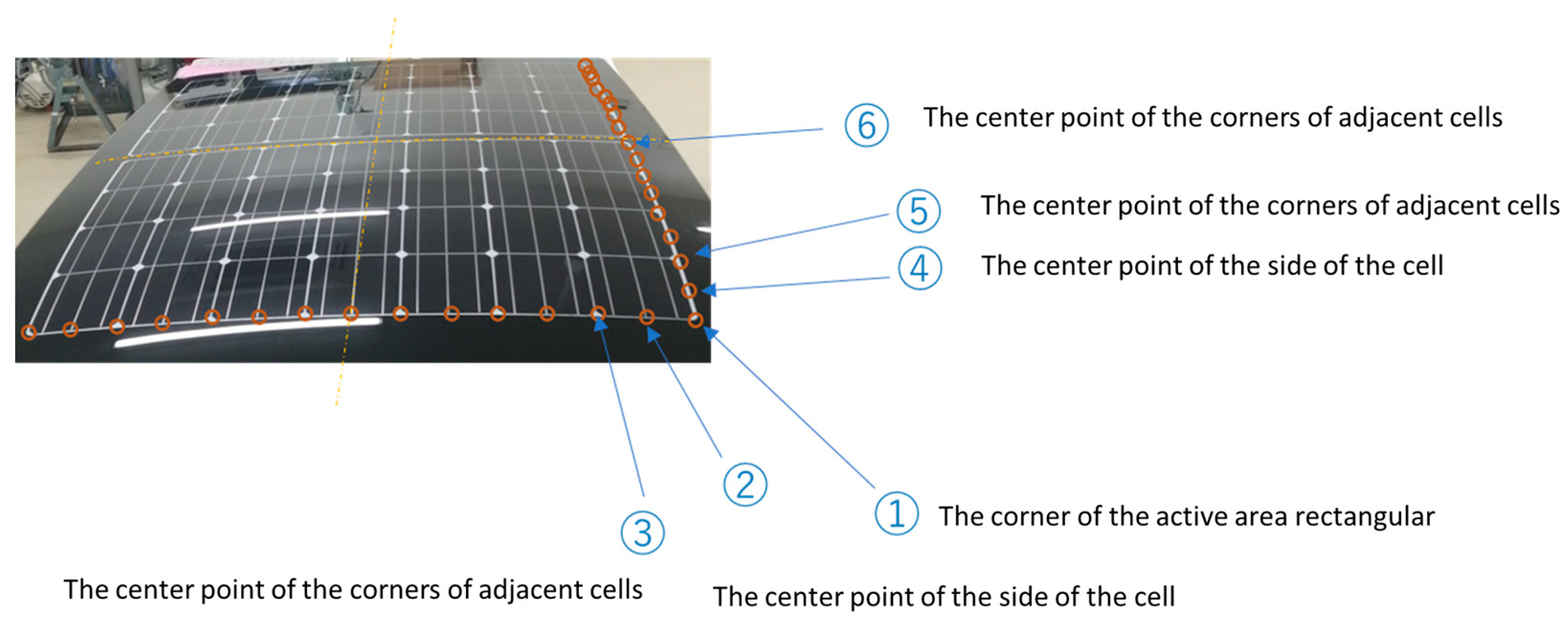
- Let N and M be the number of rows and columns, respectively, of cells in an approximately rectangular area. The (2N + 1) and (2M + 1) measurement points are divided uniformly, including the edges of the rectangular region. All the (2N + 1) × (2M + 1) Z coordinates are measured. The arithmetic mean is the B-dimension (Figure 6 and ①–⑥).
- The offset of the reference plane for the indoor test (the length indicating how close the reference surface is to the light source from the bottom of the frame) is calculated as (A + B).
3. Results
3.1. General Behaviors of the Curved PV Devices
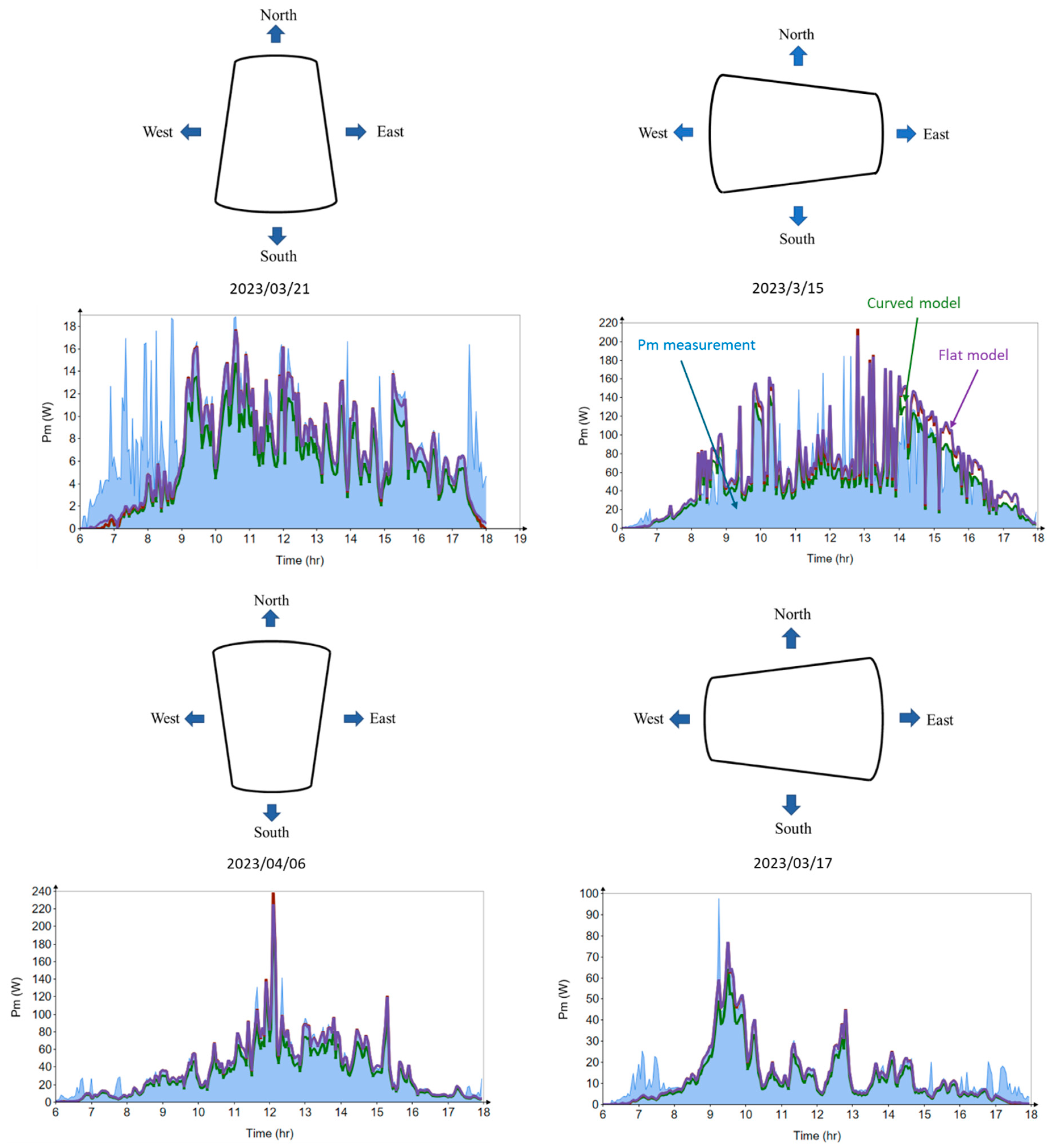
3.2. Validation of the Algorithms
4. Discussion
- The attitude and position are unaltered during the timeframe of the power measurement.
- The solar irradiance angular distribution is unaltered during the power measurement timeframe.
- All the solar cells are connected in series.
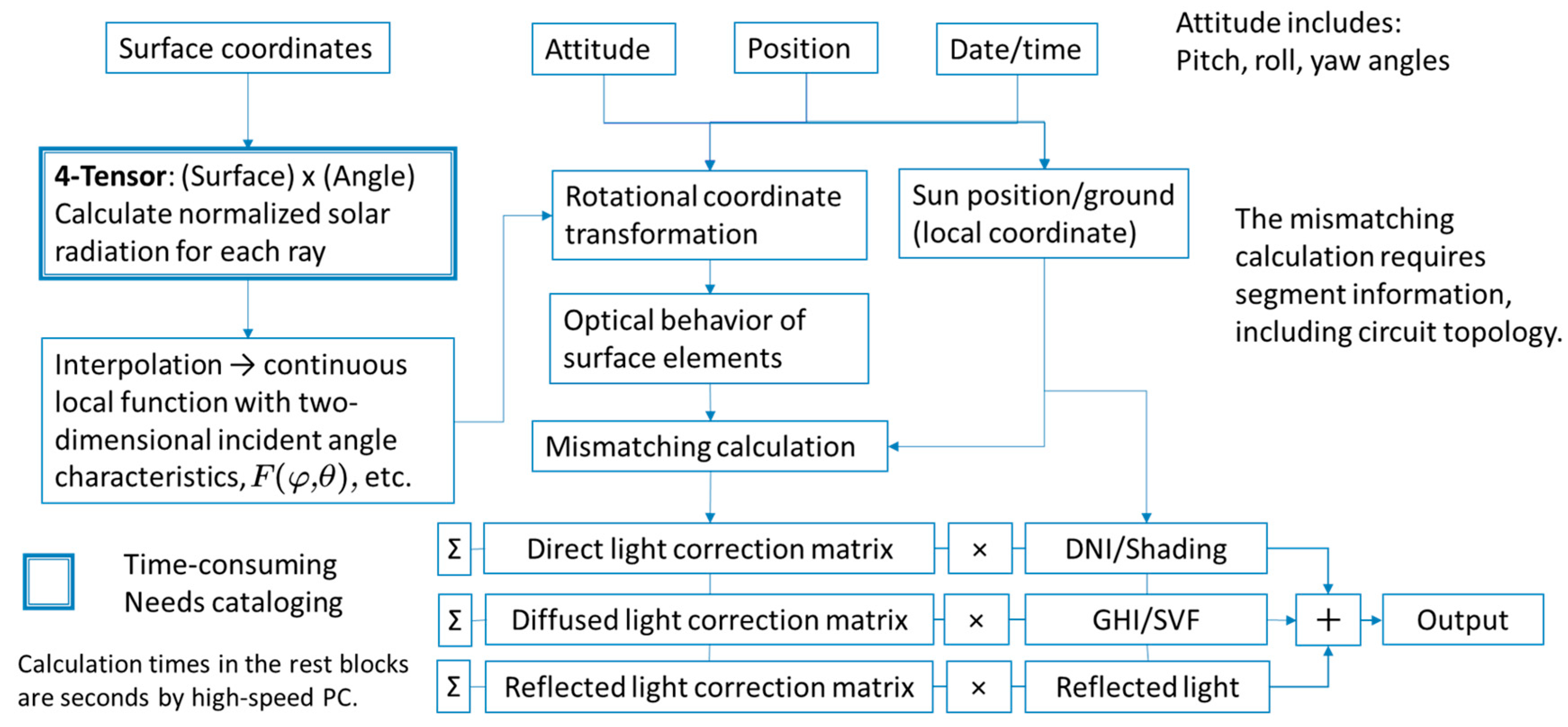
- Wavy PV arrays that are installed in hilly areas where the performance ratio decreases in winter owing to self-shading by the PV arrays and irregular skylines can use the algorithm shown in Figure 1;
- Aircraft including drones and high-altitude platform systems (HAPS) can use the algorithm shown in Figure 1;
- BIPVs with multiplexed wall shading and self-shading by irregular or nonplanar PV arrays can use the algorithm shown in Figure 1;
- In photosynthetic photon flux density (PPFD) distribution calculations for crops grown below agriphotovoltaic systems.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bogdanov, D.; Farfan, J.; Sadovskaia, K.; Aghahosseini, A.; Child, M.; Gulagi, A.; Oyewo, A.S.; de Souza Noel Simas Barbosa, L.; Breyer, C. Pathway towards sustainable electricity: Radical transformation via evolutionary transition steps. Nat. Commun. 2019, 10, 1077. [Google Scholar] [CrossRef] [PubMed]
- Brown, T.W.; Bischof-Niemz, T.; Blok, K.; Breyer, C.; Lund, H.; Mathiesen, B.V. Response to ‘burden of proof: A comprehensive review of the feasibility of 100% renewable-electricity systems’. Renew. Sustain. Energy Rev. 2018, 92, 834–847. [Google Scholar] [CrossRef]
- Ram, M.; Bogdanov, D.; Aghahosseini, A.; Solomon, O.A.; Gulagi, A.; Child, M.; Fell, H.-J.; Breyer, C. Global Energy System Based on 100% Renewable Energy-Power Sector. Study by Lappeenranta University of Technology and Energy Watch Group, Lappeenranta and Berlin. 2017. Available online: https://goo.gl/7y9sKR (accessed on 15 May 2024).
- Breyer, C.; Bogdanov, D.; Aghahosseini, A.; Gulagi, A.; Child, M.; Oyewo, A.S.; Farfan, J.; Sadovskaia, K.; Vainikka, P. Solar photovoltaics demand for the global energy transition in the power sector. Prog. Photovolt. Res. Appl. 2017, 26, 505–523. [Google Scholar] [CrossRef]
- Khalili, S.; Rantanen, E.; Bogdanov, D.; Breyer, C. Global Transportation Demand Development with Impacts on the Energy Demand and Greenhouse Gas Emissions in a Climate-Constrained World. Energies 2019, 12, 3870. [Google Scholar] [CrossRef]
- García-Olivares, A.; Solé, J.; Osychenko, O. Transportation in a 100% renewable energy system. Energ. Convers. Manag. 2018, 158, 266–285. [Google Scholar] [CrossRef]
- Breyer, C.; Khalili, S.; Bogdanov, D. Solar photovoltaic capacity demand for a sustainable transport sector to fulfil the Paris Agreement by 2050. Prog. Photovolt. Res. Appl. 2019, 27, 978–989. [Google Scholar] [CrossRef]
- Wang, D.; Sechilariu, M.; Locment, F. PV-Powered Charging Station for Electric Vehicles: Power Management with Integrated V2G. Appl. Sci. 2020, 10, 6500. [Google Scholar] [CrossRef]
- Sayed, K.; Abo-Khalil, A.G.; Alghamdi, A.S. Optimum Resilient Operation and Control DC Microgrid Based Electric Vehicles Charging Station Powered by Renewable Energy Sources. Energies 2019, 12, 4240. [Google Scholar] [CrossRef]
- Wang, D.; Locment, F.; Sechilariu, M. Modelling, Simulation, and Management Strategy of an Electric Vehicle Charging Station Based on a DC Microgrid. Appl. Sci. 2020, 10, 2053. [Google Scholar] [CrossRef]
- Yao, L.; Damiran, Z.; Lim, W.H. Optimal Charging and Discharging Scheduling for Electric Vehicles in a Parking Station with Photovoltaic System and Energy Storage System. Energies 2017, 10, 550. [Google Scholar] [CrossRef]
- Dai, Q.; Liu, J.; Wei, Q. Optimal Photovoltaic/Battery Energy Storage/Electric Vehicle Charging Station Design Based on Multi-Agent Particle Swarm Optimization Algorithm. Sustainability 2019, 11, 1973. [Google Scholar] [CrossRef]
- Araki, K.; Nagai, H.; Yamaguchi, M. September. Possibility of solar station to EV. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2016; Volume 1766, p. 080001. [Google Scholar]
- Araki, K.; Ji, L.; Kelly, G.; Yamaguchi, M. To do list for research and development and international standardization to achieve the goal of running a majority of electric vehicles on solar energy. Coatings 2018, 8, 251. [Google Scholar] [CrossRef]
- [IEA PVPS]—International Energy Agency Photovoltaic Power System Programme. PV for Transport, IEA PVPS Task 17. St. Ursen: IEA PVPS. 2018. Available online: http://www.iea-pvps.org/index.php?id=484 (accessed on 15 May 2024).
- Sono Motors. Sion—Infinite Mobility, Munich. 2018. Available online: https://sonomotors.com/sion.html/ (accessed on 15 May 2024).
- Jeon, S.; Choung, S.; Bae, S.; Choi, J.; Shin, D. Analysis on Power Generation Characteristics of a Vehicle Rooftop Photovoltaic Module with Urban Driving Conditions. Tran. Korean Inst. Power Electron. 2020, 25, 79–86. [Google Scholar]
- Schuss, C.; Fabritius, T.; Eichberger, B.; Rahkonen, T. Energy-efficient Routing of Electric Vehicles with Integrated Photovoltaic Installations. In Proceedings of the 2020 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Dubrovnik, Croatia, 25–28 May 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Letendre, S.; Perez, R.; Herig, C. Vehicle integrated PV: A clean and secure fuel for hybrid electric vehicles. In Proceedings of the Solar Conference; American Solar Energy Society: Boulder, CO, USA; American Institute of Architects: Washington, DC, USA, 2003; pp. 201–206. [Google Scholar]
- Kim, J.; Wang, Y.; Pedram, M.; Chang, N. Fast photovoltaic array reconfiguration for partial solar powered vehicles. In Proceedings of the International Symposium on Low Power Electronics and Design, La Jolla, CA, USA, 11–13 August 2014; pp. 357–362. [Google Scholar]
- Araki, K.; Sato, D.; Masuda, T.; Lee, K.H.; Yamada, N.; Yamaguchi, M. Why and how does car-roof PV create 50 GW/year of new installations? Also, why is a static CPV suitable to this application? In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2019; Volume 2149, Number 1; p. 050003. [Google Scholar]
- De Pinto, S.; Lu, Q.; Camocardi, P.; Chatzikomis, C.; Sorniotti, A.; Ragonese, D.; Iuzzolino, G.; Perlo, P.; Lekakou, C. Electric vehicle driving range extension using photovoltaic panels. In Proceedings of the IEEE Vehicle Power and Propulsion Conference (VPPC), Hangzhou, China, 17–20 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Fujinaka, M. The practically usable electric vehicle charged by photovoltaic cells. In Proceedings of the 24th Intersociety Energy Conversion Engineering Conference, Washington, DC, USA, 6–11 August 1989; IEEE: Piscataway, NJ, USA, 2002; pp. 2473–2478. [Google Scholar]
- Ezzat, M.F.; Dincer, I. Development, analysis and assessment of a fuel cell and solar photovoltaic system powered vehicle. Energy Convers. Manag. 2016, 129, 284–292. [Google Scholar] [CrossRef]
- Talluri, G.; Grasso, F.; Chiaramonti, D. Is Deployment of Charging Station the Barrier to Electric Vehicle Fleet Development in EU Urban Areas? An Analytical Assessment Model for Large-Scale Municipality-Level EV Charging Infrastructures. Appl. Sci. 2019, 9, 4704. [Google Scholar] [CrossRef]
- Alhammad, Y.A.; Al-Azzawi, W.F. Exploitation the waste energy in hybrid cars to improve the efficiency of solar cell panel as an auxiliary power supply. In Proceedings of the 10th International Symposium on Mechatronics and its Applications (ISMA), Sharjah, United Arab Emirates, 8–10 December 2015; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Naves, A.X.; Tulus, V.; Vazquez, E.G.; Esteller, L.J.; Haddad, A.N.; Boer, D. Economic Optimization of the Energy Supply for a Logistics Center Considering Variable-Rate Energy Tariffs and Integration of Photovoltaics. Appl. Sci. 2019, 9, 4711. [Google Scholar] [CrossRef]
- Pavlovic, A.; Sintoni, D.; Fragassa, C.; Minak, G. Multi-Objective Design Optimization of the Reinforced Composite Roof in a Solar Vehicle. Appl. Sci. 2020, 10, 2665. [Google Scholar] [CrossRef]
- Samadi, H.; Ala, G.; Lo Brano, V.; Romano, P.; Viola, F. Investigation of Effective Factors on Vehicles Integrated Photovoltaic (VIPV) Performance: A Review. World Electr. Veh. J. 2023, 14, 154. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Saiki, H.; Tawa, H.; Nishioka, K.; Yamaguchi, M. Super-Multi-Junction Solar Cells—Device Configuration with the Potential for More Than 50% Annual Energy Conversion Efficiency (Non-Concentration). Appl. Sci. 2019, 9, 4598. [Google Scholar] [CrossRef]
- Yamaguchi, M.; Ozaki, R.; Nakamura, K.; Lee, H.; Kojima, N.; Ohshita, Y.; Masuda, T.; Okumura, K.; Satou, A.; Nakado, T.; et al. Development of High-Efficiency Solar Cell Modules for Photovoltaic-Powered Vehicles. Sol. RRL 2022, 6, 2100429. [Google Scholar] [CrossRef]
- Vadgama, T.N.; Patel, M.A.; Thakkar, D.D. Design of Formula One Racing Car. Int. J. Eng. Res. Technol. 2015, 4, 702–712. [Google Scholar]
- Ustun, O.; Yilmaz, M.; Gokce, C.; Karakaya, U.; Tuncay, R.N. Energy management method for solar race car design and application. In Proceedings of the 2009 IEEE International Electric Machines and Drives Conference, Madison, WI, USA, 3–6 May 2009; pp. 804–811. [Google Scholar]
- Minak, G.; Fragassa, C.; de Camargo, F.V. A Brief Review on Determinant Aspects in Energy Efficient Solar Car Design and Manufacturing. In Sustainable Design and Manufacturing (SDM) 2017; Campana, G., Ed.; Smart Innovation, Systems and Technologies; Springer: Cham, Switzerland, 2017; Volume 68, pp. 847–856. [Google Scholar]
- Odabasi, V.; Maglio, S.; Martini, A.; Sorrentino, S. Static stress analysis of suspension systems for a solar-powered car. FME Trans. 2019, 47, 70–75. [Google Scholar] [CrossRef]
- Betancur, E.; Fragassa, C.; Coy, J.; Hincapie, S.; Osorio, G. Aerodynamic effects of manufacturing tolerances on a solar car. In Proceedings of the International Conference on Sustainable Design and Manufacturing, Bologna, Italy, 26–28 April 2002; pp. 868–876. [Google Scholar]
- Beardmore, P.; Johnson, C.F. The potential for composites in structural automotive applications. Compos. Sci. Technol. 1986, 26, 251–281. [Google Scholar] [CrossRef]
- Nagavally, R.R. Composite materials-history, types, fabrication techniques, advantages, and applications. Int. J. Mech. Prod. Eng. 2017, 5, 82–87. [Google Scholar]
- Yang, R.J.; Chahande, A.I. Automotive applications of topology optimization. Struct. Optim. 1995, 9, 245–249. [Google Scholar] [CrossRef]
- Cavazzuti, M.; Splendi, L.; D’Agostino, L.; Torricelli, E.; Costi, D.; Baldini, A. Structural optimization of automotive chassis: Theory, set up, design. In Problemes Inverses, Controle et Optimisation de Formes; Université Paris-Dauphine: Paris, France, 2012; Volume 6. [Google Scholar]
- Cavazzuti, M.; Baldini, A.; Bertocchi, E.; Costi, D.; Torricelli, E.; Moruzzi, P. High performance automotive chassis design: A topology optimization based approach. Struct. Multidiscip. Optim. 2011, 44, 45–56. [Google Scholar] [CrossRef]
- Zhu, P.; Zhang, Y.; Chen, G.L. Metamodel-based lightweight design of an automotive front-body structure using robust optimization. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2009, 223, 1133–1147. [Google Scholar] [CrossRef]
- Yildiz, A.R. A new hybrid particle swarm optimization approach for structural design optimization in the automotive industry. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 226, 1340–1351. [Google Scholar] [CrossRef]
- Ermolaeva, N.S.; Castro, M.B.; Kandachar, P.V. Materials selection for an automotive structure by integrating structural optimization with environmental impact assessment. Mater. Des. 2004, 25, 689–698. [Google Scholar] [CrossRef]
- Minak, G.; Brugo, T.M.; Fragassa, C.; Pavlovic, A.; Zavatta, N.; De Camargo, F. Structural Design and Manufacturing of a Cruiser Class Solar Vehicle. J. Vis. Exp. 2019, 143, e58525. [Google Scholar]
- Cross, N.; Cross, A.C. Winning by design: The methods of Gordon Murray, racing car designer. Des. Stud. 1996, 17, 91–107. [Google Scholar] [CrossRef]
- Holmberg, K.; Andersson, P.; Erdemir, A. Global energy consumption due to friction in passenger cars. Tribol. Int. 2012, 47, 221–234. [Google Scholar] [CrossRef]
- Joost, W. Reducing vehicle weight and improving U.S. energy efficiency using integrated computational materials engineering. J. Miner Met. Mater. Soc. 2012, 64, 1032–1038. [Google Scholar] [CrossRef]
- Elmarakbi, A. Advanced Composite Materials for Automotive Applications: Structural Integrity and Crashworthiness; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Parkinson, A.R.; Balling, R.; Hedengren, J.D. Optimization Methods for Engineering Design; Brigham Young University: Provo, UT, USA, 2013. [Google Scholar]
- Kim, C.H.; Mijar, A.R.; Arora, J.S. Development of simplified models for design and optimization of automotive structures for crashworthiness. Struct. Multidiscip. Optim. 2001, 22, 307–321. [Google Scholar] [CrossRef]
- Muyl, F.; Dumas, L.; Herbert, V. Hybrid method for aerodynamic shape optimization in automotive industry. Comput. Fluids 2004, 33, 849–858. [Google Scholar] [CrossRef]
- Nikbakt, S.; Kamarian, S.; Shakeri, M. A review on optimization of composite structures Part I: Laminated composites. Compos. Struct. 2018, 195, 158–185. [Google Scholar] [CrossRef]
- Dos Santos, F.L.M.; Peeters, B.; Menchicchi, M.; Lau, J.; Gielen, L.; Desmet, W.; Góes, L.C.S. Strain-based dynamic measurements and modal testing. In Topics in Modal Analysis II; Allemang, R., Ed.; Springer: Cham, Switzerland, 2014; Volume 8, pp. 233–242. [Google Scholar]
- Wloch, K.; Bentley, P.J. Optimising the performance of a formula one car using a genetic algorithm. In International Conference on Parallel Problem Solving from Nature; Springer: Berlin/Heidelberg, Germany, 2004; pp. 702–711. [Google Scholar]
- De Kock, J.P.; van Rensburg, N.J.; Kruger, S.; Laubscher, R.F. Aerodynamic optimization in a lightweight solar vehicle design. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2017; pp. 1–8. [Google Scholar]
- Kudo, Y.; Sato, A.; Kimura, K.; Iwamoto, S.; Ohba, H.; Sakabe, M.; Shirai, Y. Solar module laminated constitution for automobiles. In Proceedings of the SAE 2016 World Congress and Exhibition, Detroit, MI, USA, 12–14 April 2016. [Google Scholar]
- Alpuerto, L.; Balog, R.S. Comparing Connection Topologies of PV Integrated Curved Roof Tile for Improved Performance. In Proceedings of the 2020 IEEE Texas Power and Energy Conference (TPEC), College Station, TX, USA, 6–7 February 2020; pp. 1–5. [Google Scholar]
- Walker, G.R.; Xue, J.; Sernia, P. PV string per-module maximum power point enabling converters. In Proceedings of the Australasian Universities Power Engineering Conference (AUPEC’03), Christchurch, New Zealand, 28 September—1 October 2003. [Google Scholar]
- Benlekkam, M.; Nehari, D.; Madani, H.I. Enhancement of the thermal regulation performance of a curved PV panel. Int. J. Renew. Energy Res. 2017, 7, 707–714. [Google Scholar]
- Sato, D.; Masuda, T.; Araki, K.; Yamaguchi, M.; Okumura, K.; Sato, A.; Tomizawa, R.; Yamada, N. Stretchable micro-scale concentrator photovoltaic module with 15.4% efficiency for three-dimensional curved surfaces. Commun. Mater. 2021, 2, 7. [Google Scholar] [CrossRef]
- Commault, B.; Duigou, T.; Maneval, V.; Gaume, J.; Chabuel, F.; Voroshazi, E. Overview and Perspectives for Vehicle-Integrated Photovoltaics. Appl. Sci. 2020, 11, 11598. [Google Scholar] [CrossRef]
- Wheeler, A.J.; Leveille, M.; Kurtz, S.; Anton, I.; Limpinsel, M. Outdoor Performance of PV Technologies in Simulated Automotive Environments. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019. [Google Scholar]
- Wheeler, A.; Leveille, M.; Anton, I.; Leilaeioun, A.; Kurtz, S. Determining the Operating Temperature of Solar Panels on Vehicles. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019. [Google Scholar]
- Ota, Y.; Masuda, T.; Araki, K.; Yamaguchi, M. Curve-correction factor for characterization of the output of a three-dimensional curved photovoltaic module on a car roof. Coatings 2018, 8, 432. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Nishioka, K.; Tobita, H.; Ji, L.; Kelly, G.; Yamaguchi, M. Toward the Standardization of the Car-roof PV–The challenge to the 3-D Sunshine Modeling and Rating of the 3-D Continuously Curved PV Panel. In Proceedings of the 2018 IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC & 34th EU PVSEC), Waikoloa, HI, USA, 10–15 June 2018; pp. 0368–0373. [Google Scholar]
- Araki, K.; Ota, Y.; Lee, K.H.; Yamada, N.; Yamaguchi, M. Curve Correction of the Energy Yield by Flexible Photovoltaics for VIPV and BIPV Applications Using a Simple Correction Factor. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019; pp. 1584–1591. [Google Scholar]
- Ota, Y.; Araki, K.; Nagaoka, A.; Nishioka, K. Facilitating vehicle-integrated photovoltaics by considering the radius of curvature of the roof surface for solar cell coverage. Clean. Eng. Technol. 2022, 7, 100446. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Nishioka, K. Testing and rating of vehicle-integrated photovoltaics: Scientific background. Sol. Energy Mater. Sol. Cells, 2024; in review. [Google Scholar]
- Araki, K.; Ota, Y.; Maeda, A.; Kumano, M.; Nishioka, K. Solar Electric Vehicles as Energy Sources in Disaster Zones: Physical and Social Factors. Energies 2022, 16, 3580. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Nagaoka, A.; Nishioka, K. 3D Solar Irradiance Model for Nonuniform Shading Environments Using Shading (Aperture) Matrix Enhanced by Local Coordinate System. Energies 2022, 16, 4414. [Google Scholar] [CrossRef]
- Kurtz, S.R.; O’Neill, M.J. Estimating and controlling chromatic aberration losses for two-junction, two-terminal devices in refractive concentrator systems. In Proceedings of the Conference Record of the Twenty Fifth IEEE Photovoltaic Specialists Conference, Washington, DC, USA, 13–17 May 1996; pp. 361–364. [Google Scholar]
- James, L.W. Effects of concentrator chromatic aberration on multi-junction cells. In Proceedings of the 1994 IEEE 1st World Conference on Photovoltaic Energy Conversion-WCPEC (A Joint Conference of PVSC, PVSEC and PSEC), Waikoloa, HI, USA, 5–9 December 1994; pp. 1799–1802. [Google Scholar]
- Sato, D.; Lee, K.H.; Araki, K.; Masuda, T.; Yamaguchi, M.; Yamada, N. Design of low-concentration static III-V/Si partial CPV module with 27.3% annual efficiency for car-roof application. Prog. Photovolt. Res. Appl. 2019, 27, 501–510. [Google Scholar] [CrossRef]
- Rebeca, H.; Antón, I.; Victoria, M.; Domínguez, C.; Askins, S.; Sala, G.; De Nardis, D.; Araki, K. Experimental analysis and simulation of a production line for CPV modules: Impact of defects, misalignments, and binning of receivers. Energy Sci. Eng. 2017, 5, 257–269. [Google Scholar]
- Herrero, R.; Antón, I.; Sala, G.; De Nardis, D.; Araki, K.; Yamaguchi, M. September. Monte Carlo simulation to analyze the performance of CPV modules. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2017; Volume 1881, p. 090001. [Google Scholar]
- Araki, K.; Nagai, H.; Herrero, R.; Antón, I.; Sala, G.; Yamaguchi, M. Off-Axis Characteristics of CPV Modules Result From Lens-Cell Misalignment—Measurement and Monte Carlo Simulation. IEEE J. Photovolt. 2016, 6, 1353–1359. [Google Scholar] [CrossRef]
- Araki, K.; Nagai, H.; Herrero, R.; Antón, I.; Sala, G.; Lee, K.H.; Yamaguchi, M. 1-D and 2-D Monte Carlo simulations for analysis of CPV module characteristics including the acceptance angle impacted by assembly errors. Sol. Energy 2017, 147, 448–454. [Google Scholar] [CrossRef]
- Mangu, R.; Prayaga, K.; Nadimpally, B.; Nicaise, S. Design, Development and Optimization of Highly Efficient Solar Cars: Gato del Sol I–IV. In Proceedings of the 2010 IEEE Green Technologies Conference, Grapevine, TX, USA, 15–16 April 2010; pp. 1–6. [Google Scholar]
- Araki, K.; Carr, A.J.; Chabuel, F.; Commault, B.; Derks, R.; Ding, K.; Duigou, T.; Ekins-Daukes, N.J.; Gaume, J.; Hirota, T.; et al. State-of-the-Art and Expected Benefits of PV-Powered Vehicles, International Energy Agency. 2021. Available online: https://iea-pvps.org/key-topics/state-of-the-art-and-expected-benefits-of-pv-powered-vehicles/ (accessed on 15 May 2024).
- Heinrich, M.; Kutter, C.; Basler, F.; Mittag, M.; Alanis, L.E.; Eberlein, D.; Schmid, A.; Reise, C.; Kroyer, T.; Neuhaus, D.H.; et al. Potential and Challenges of Vehicle Integrated Photovoltaics for Passenger Cars. In Proceedings of the 37th European PV Solar Energy Conference and Exhibition, Lisbon, Portugal, 7–11 September 2020. [Google Scholar]
- How to Install Flexible Solar Panels for Car Roof, Sungold. Available online: https://www.sungoldsolar.com/how-to-install-flexible-solar-panels-for-car-roof/ (accessed on 22 December 2023).
- Bellini, E. Vehicle-Integrated Solar Kit May Reduce Frequency of Recharging by 14%. pv Magazine. Available online: https://www.pv-magazine-australia.com/2022/09/26/vehicle-integrated-solar-kit-may-reduce-frequency-of-recharging-by-14/ (accessed on 22 December 2023).
- Solar Cells in Vehicles (VIPV): Between Research and Realism. IMEC. Available online: https://www.imec-int.com/en/articles/solar-cells-vehicles-vipv-between-research-and-realism (accessed on 22 December 2023).
- Rosca, V.; Guillevin, N.; Okel, L.A.G.; Newman, B.K. Prefab Approach to Mass Customization. In Proceedings of the SiliconPV Conferenz, Konstanz, Germany, 28–30 March 2022. [Google Scholar]
- Okel, L.A.G.; Guillevin, N.; Hoek, E.; Apaydin, O.; Rosca, V.; Newman, B.K. Manufacturing high-yield, low-cost, lightweight VIPV components. In Proceedings of the PVinMotion, ‘s-Hertogenbosch, The Netherlands, 15–17 February 2023. [Google Scholar]
- Newman, B.K. Advances in conductive back sheet module technology for emerging applications. In Proceedings of the Back Contact Workshop, Munich, Germany, 12 May 2022. [Google Scholar]
- Shukla, A.K.; Sudhakar, K.; Baredar, P. A comprehensive review on design of building integrated photovoltaic system. Energy Build. 2016, 128, 99–110. [Google Scholar] [CrossRef]
- Jelle, B.P.; Breivik, C. State-of-the-art Building Integrated Photovoltaics. Energy Procedia 2012, 20, 68–77. [Google Scholar] [CrossRef]
- Jelle, B.P.; Breivik, C. The path to the building integrated photovoltaics of tomorrow. Energy Procedia 2012, 20, 78–87. [Google Scholar] [CrossRef]
- Commault, B.; Chambion, B.; Serra, L.; Karoui, F.; Nassibi, S. On-Board Photovoltaic Kit for Existing Vehicles. In Proceedings of the 8th World Conference on Photovoltaic Energy Conversion, Milano, Italy, 26–30 September 2022. [Google Scholar]
- Duigou, T.; Caplet, S.; Chambion, B.; Gaume, J. Numerical simulation and experimental characterization of c-Si cells mechanical limits in spherical curvature shape. In Proceedings of the 38th EU PVSEC, Lisbon, Portugal, 6–10 September 2021. [Google Scholar]
- Zhao, J.-H.; Tellkamp, J.; Gupta, V.; Edwards, D.R. Experimental Evaluations of the Strength of Silicon Die by 3-Point-Bend versus Ball-on-Ring Tests. IEEE Trans. Electron. Packag. Manuf. 2009, 32, 248–255. [Google Scholar] [CrossRef]
- Araki, K.; Ota, Y.; Yamaguchi, M. Measurement and Modeling of 3D Solar Irradiance for Vehicle-Integrated Photovoltaic. Appl. Sci. 2020, 10, 872. [Google Scholar] [CrossRef]
- Tayagaki, T.; Araki, K.; Yamaguchi, M.; Sugaya, T. Impact of nonplanar panels on photovoltaic power generation in the case of vehicles. IEEE J. Photovolt. 2019, 9, 1721–1726. [Google Scholar] [CrossRef]
- Ota, Y.; Masuda, T.; Araki, K.; Yamaguchi, M. A mobile multipyranometer array for the assessment of solar irradiance incident on a photovoltaic-powered vehicle. Sol. Energy 2019, 184, 84–90. [Google Scholar] [CrossRef]
- Araki, K.; Lee, K.H.; Masuda, T.; Hayakawa, Y.; Yamada, N.; Ota, Y.; Yamaguchi, M. Rough and Straightforward Estimation of the Mismatching Loss by Partial Shading of the PV Modules Installed on an Urban Area or Car-Roof. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019; pp. 1218–1225. [Google Scholar]
- Zhang, X.; Jin, C.; Hu, P.; Zhu, X.; Hou, W.; Xu, J.; Wang, C.; Zhang, Y.; Ma, Z.-D.; Smith, H. NURBS modeling and isogeometric shell analysis for complex tubular engineering structures. Comput. Appl. Math. 2017, 36, 1659–1679. [Google Scholar] [CrossRef]
- Sußner, G.; Meyer, Q.; Greiner, G. High Quality Realtime Tessellation of Trimmed NURBS Surfaces for Interactive Examination of Surface Quality on Car Bodies. In Proceedings of the 17th International Meshing Roundtable; Garimella, R.V., Ed.; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Sansoni, G.; Docchio, F. Three-dimensional optical measurements and reverse engineering for automotive applications. Robot. Comput. Integr. Manuf. 2004, 20, 359–367. [Google Scholar] [CrossRef]
- Matsushita, S.; Araki, K.; Ota, Y.; Nishioka, K. Is a dpuble-bulbe curved-surface with excellent aerodynamics suitable for vhielce-integrated photovoltaic (VIPV) installations? In Proceedings of the EU PVSEC 2023, Lisbon, Portugal, 18–22 September 2023. [Google Scholar] [CrossRef]
- Nishioka, K.; Okada, K.; Araki, K.; Kiyama, S.; Ota, Y.; Nishiyama, K. PV on HAPS (high altitude platform station): PV modeling. In Proceedings of the PVinMotion conference, Neuchatel, Switzerland, 6–8 March 2024. [Google Scholar]
- Araki, K.; Yamaguchi, M.; Takamoto, T.; Ikeda, E.; Agui, T.; Kurita, H.; Takahashi, K.; Unno, T. Characteristics of GaAs-based concentrator cells. Sol. Energy Mater. Sol. Cells 2001, 66, 559–565. [Google Scholar] [CrossRef]
- Araki, K.; Yamaguchi, M. Novel equivalent circuit model and statistical analysis in parameters identification. Sol. Energy Mater. Sol. Cells 2003, 75, 457–4661. [Google Scholar] [CrossRef]
- Araki, K.; Yamaguchi, M.; Kondo, M.; Uozumi, H. Which is the best number of junctions for solar cells under ever-changing terrestrial spectrum? In Proceedings of the 3rd World Conference on Photovoltaic Energy Conversion, Osaka, Japan, 11–18 May 2003; Code 63772. pp. 307–312. [Google Scholar]
- Tawa, H.; Saiki, H.; Ota, Y.; Araki, K.; Takamoto, T.; Nishioka, K. Accurate output forecasting method for various photovoltaic modules considering incident angle and spectral change owing to atmospheric parameters and cloud conditions. Appl. Sci. 2020, 10, 703. [Google Scholar] [CrossRef]
- Araki, K.; Tawa, H.; Saiki, H.; Ota, Y.; Nishioka, K.; Yamaguchi, M. The outdoor field test and energy yield model of the four-terminal on Si tandem PV module. Appl. Sci. 2020, 10, 2529. [Google Scholar] [CrossRef]
- Newman, B.K.; Burgers, A.R.; Dekker, N.J.J.; Manshanden, P.; Jansen, M.J.; Kester, J.C.P. Impact of Dynamic Shading in cSi PV Modules and Systems for Novel Applications. In Proceedings of the 2019 IEEE 46th Photovoltaic Specialists Conference (PVSC), Chicago, IL, USA, 16–21 June 2019. [Google Scholar]
- Schuss, C.; Kotikumpu, T.; Eichberger, B.; Rahkonen, T. Impact of dynamic environmental conditions on the output behaviour of photovoltaics. In Proceedings of the 20th IMEKO TC-4 International Symposium, Benevento, Italy, 15–17 September 2014; pp. 993–998. [Google Scholar]
- Schuss, C.; Gall, H.; Eberhart, K.; Illko, H.; Eichberger, B. Alignment and interconnection of photovoltaics on electric and hybrid electric vehicles. In Proceedings of the IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Montevideo, Uruguay, 12–15 May 2014; pp. 153–158. [Google Scholar]
- Itagaki, A.; Okumura, H.; Yamada, A. Preparation of meteorological data set throughout Japan for suitable design of PV systems Photovoltaic Energy Conversion. In Proceedings of the 3rd World Conference on Photovoltaic Energy Conversion, Osaka, Japan, 11–18 May 2003; Volume 2. [Google Scholar]
- Shirakawa, K.; Itagaki, A.; Utsunomiya, T. Preparation of hourly solar radiation data on inclined surface (METPV-11) throughout Japan. In Proceedings of the JSES/JWEA Joint Conference, Wakkanai, Japan, 21–22 September 2011; pp. 193–196. [Google Scholar]
- Araki, K.; Ji, L.; Kelly, G.; Ham, A.V.D.; Agudo, E.; Antón, I.; Baudrit, M.; Carr, A.; Herrero, R.; Kurtz, S.; et al. How did the knowledge of CPV contribute to the standardization activity of VIPV? In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2020; Volume 2298, p. 060001. [Google Scholar]
- Pravettoni, M.; Toto Brocchi, A. Towards a definition of standard test conditions for vehicle integrated photovoltaics. In Proceedings of the SNEC 2019 Scientific Conference, Shanghai, China, 5 June 2019. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Typical PV Devices | Vehicle Applications | |
|---|---|---|
| Shape of PV devices (cells and modules) | Flat surface | Curved surface (undevelopable curved surface) based on differential geometry |
| Basic math | Arithmetic with trigonometric functions | Vector computations |
| Ray orientation | Cosine | The inner product between the normal vector of the surface element and rays |
| Angular response | Lambertian | 4-tensor |
| Coordinate system | Absolute ground coordinates | Local coordinates with 3D rotation |
| Sky model | Uniform hemisphere sky (Shading ratio: scalar) | Non-uniform shading on hemisphere sky (Shading matrix: matrix) |
| Partial and dynamic shading 1 | Time integration with weighting | Statistical model on probabilities and expected values |
| Stress calculation1 | Bending load to a thin plate | Buckling by 3D bending owing to coverage of an undevelopable curved surface (differential geometry and continuum dynamics) |
| Layer | Category | Goal |
|---|---|---|
| Layer 1 | Product testing | Reproducibility among testing laboratories |
| Layer 2 | Operating modeling | Accuracy (affected by shadows and curved surface) |
| Layer 3 | Energy rating | Transparency (everyone can perform calculations) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Araki, K.; Ota, Y.; Nishioka, K. Vector-Based Advanced Computation for Photovoltaic Devices and Arrays: Numerical Reproduction of Unusual Behaviors of Curved Photovoltaic Devices. Appl. Sci. 2024, 14, 4855. https://doi.org/10.3390/app14114855
Araki K, Ota Y, Nishioka K. Vector-Based Advanced Computation for Photovoltaic Devices and Arrays: Numerical Reproduction of Unusual Behaviors of Curved Photovoltaic Devices. Applied Sciences. 2024; 14(11):4855. https://doi.org/10.3390/app14114855
Chicago/Turabian StyleAraki, Kenji, Yasuyuki Ota, and Kensuke Nishioka. 2024. "Vector-Based Advanced Computation for Photovoltaic Devices and Arrays: Numerical Reproduction of Unusual Behaviors of Curved Photovoltaic Devices" Applied Sciences 14, no. 11: 4855. https://doi.org/10.3390/app14114855