
Analysis of the Impact Resistance Characteristics of a Power Propulsion Shaft System Containing a High-Elasticity Coupling


Abstract
1. Introduction
2. Electric Propulsion Shaft System Model and Static Characteristic Analysis
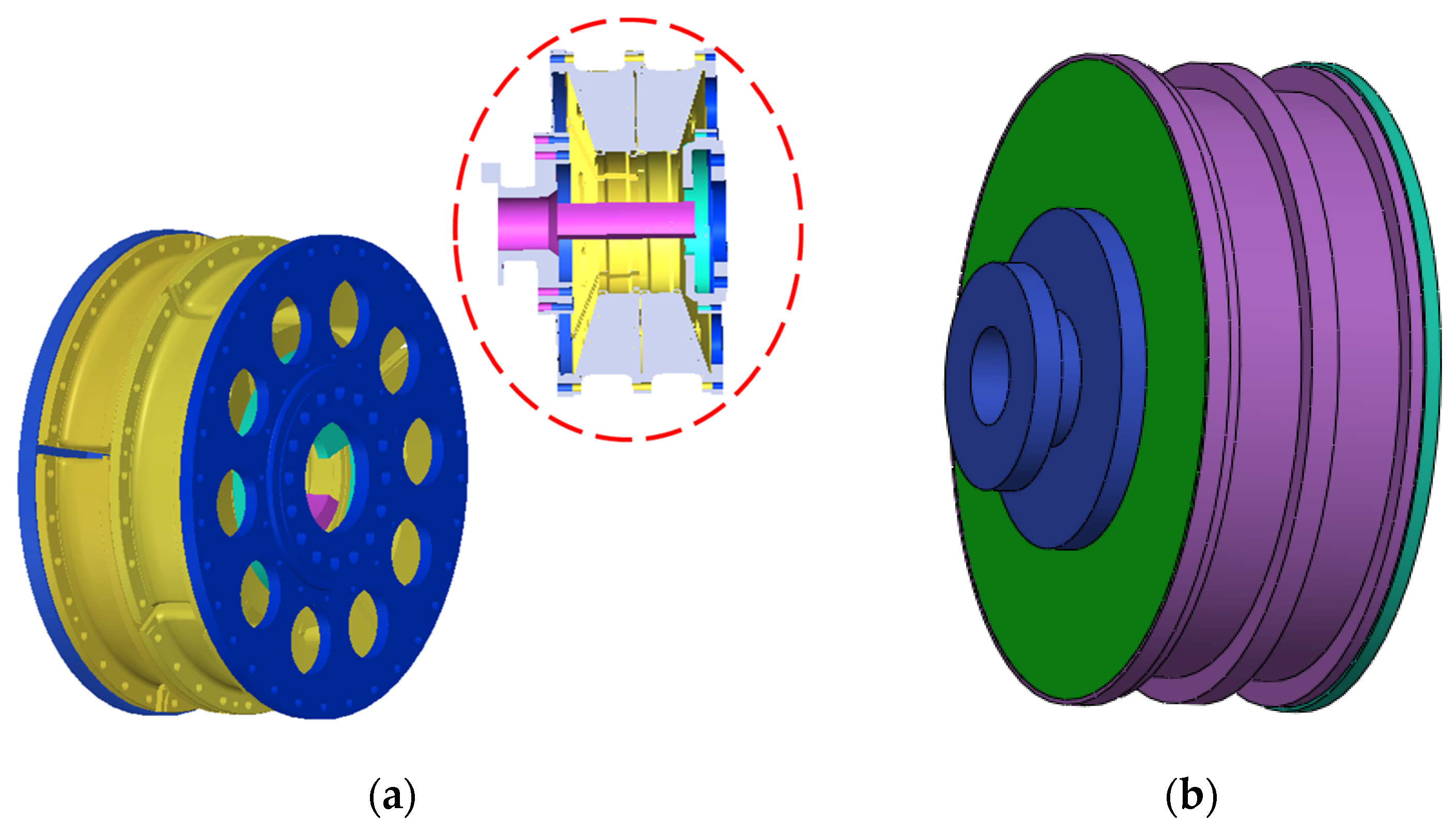
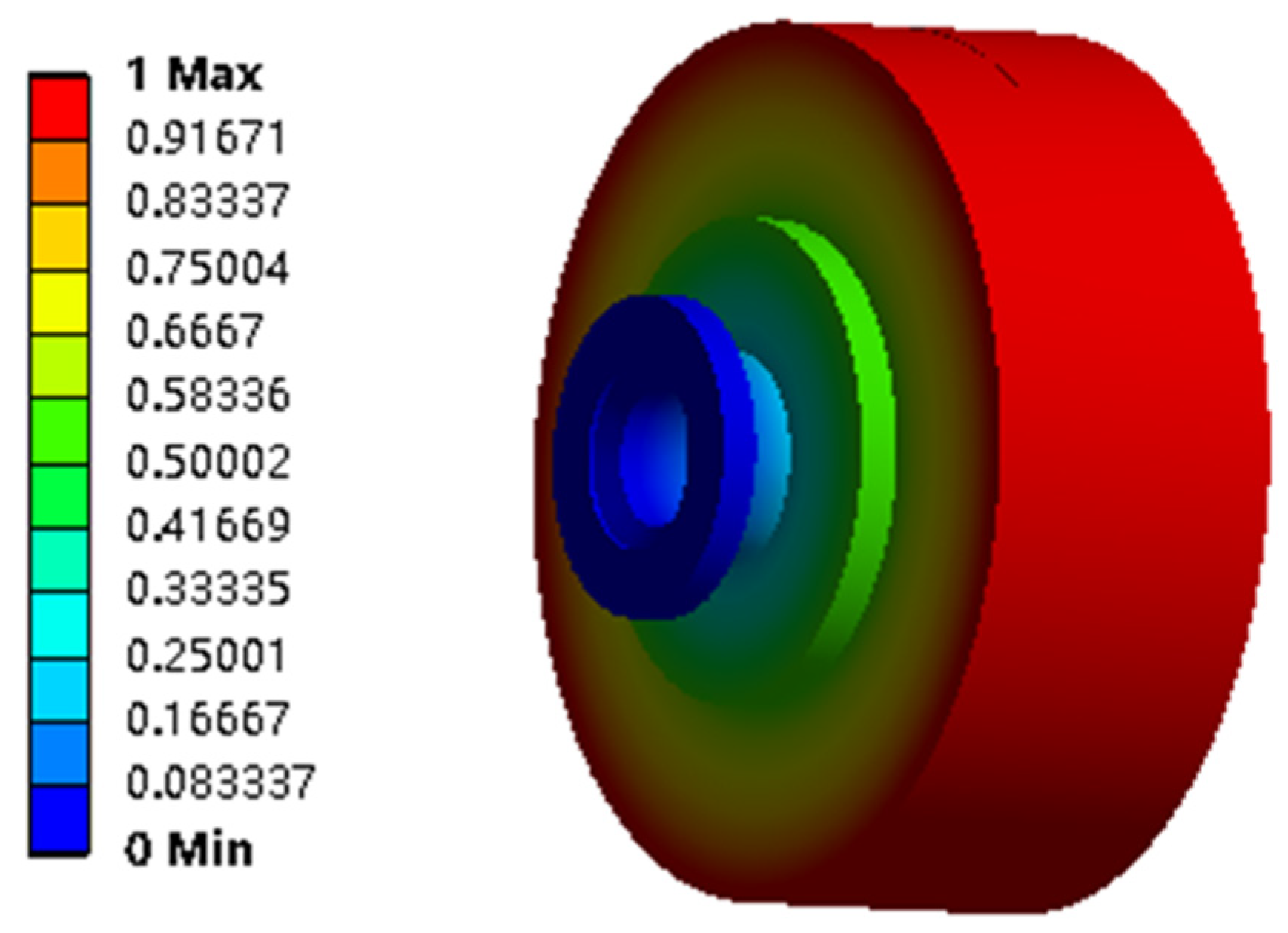
2.1. High Elasticity Coupling Model and Characteristic Analysis
2.1.1. Elastic Coupling Rubber Material Stress–Strain Relationship
2.1.2. High-Elasticity Coupling Model
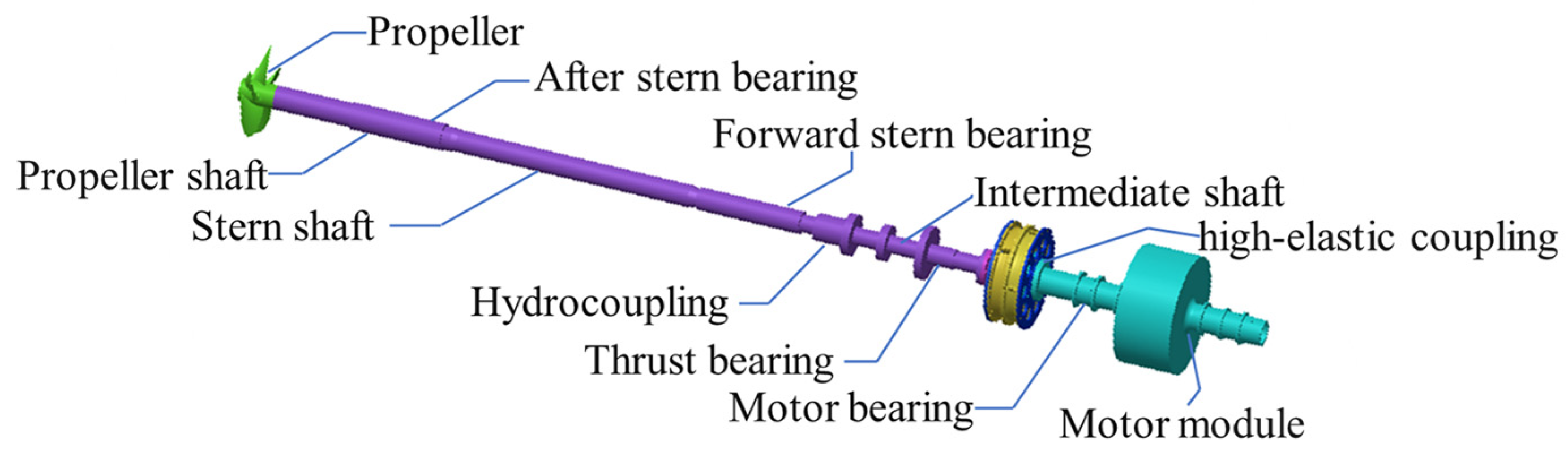
2.2. Propulsion Shafting System Model
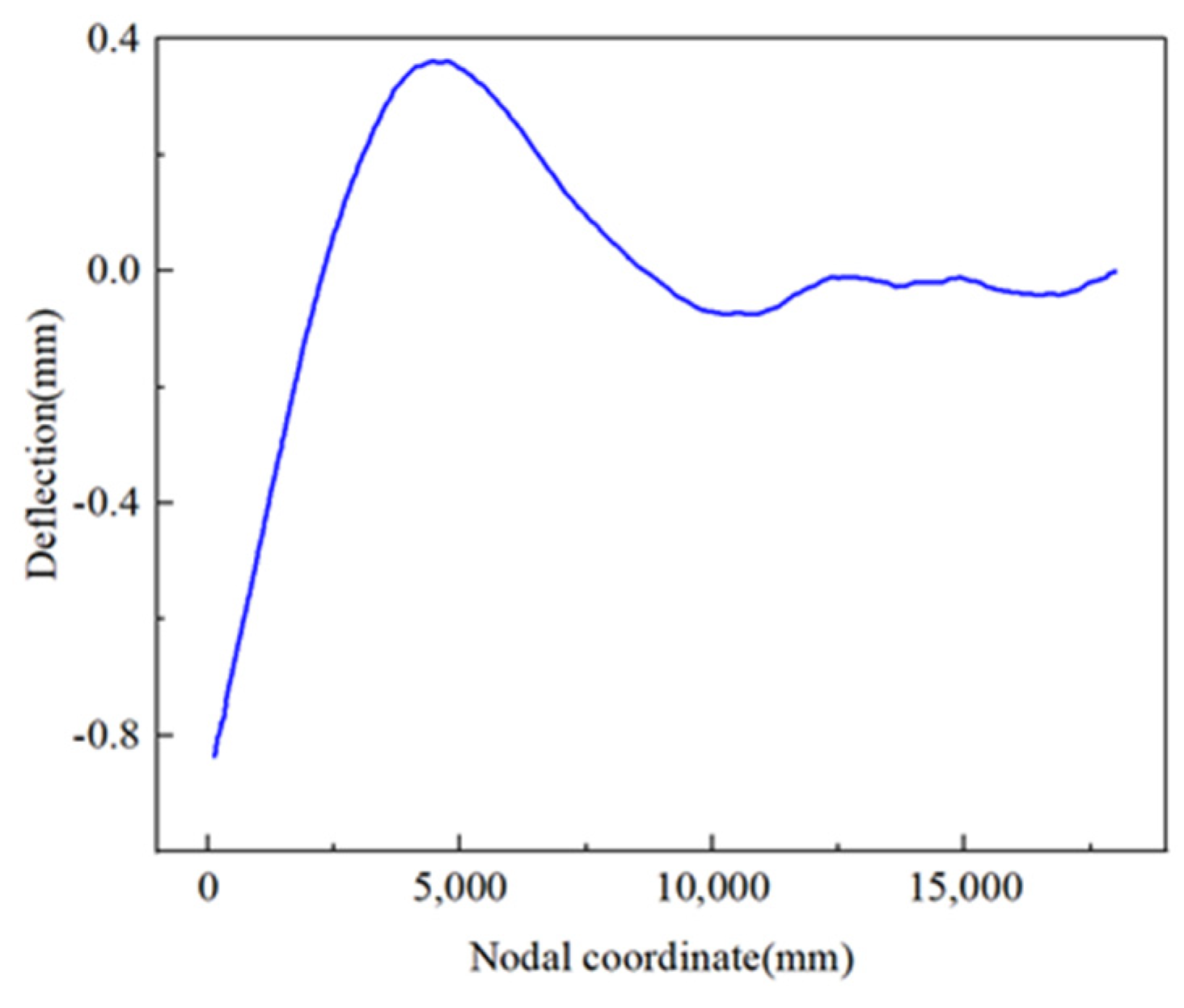
2.3. Static Analysis of Propulsion Shafting System
2.3.1. Static Mechanical Analysis
2.3.2. Modal Analysis
3. DDAM for Impact Resistance Calculation
3.1. Impact Acceleration Calculation
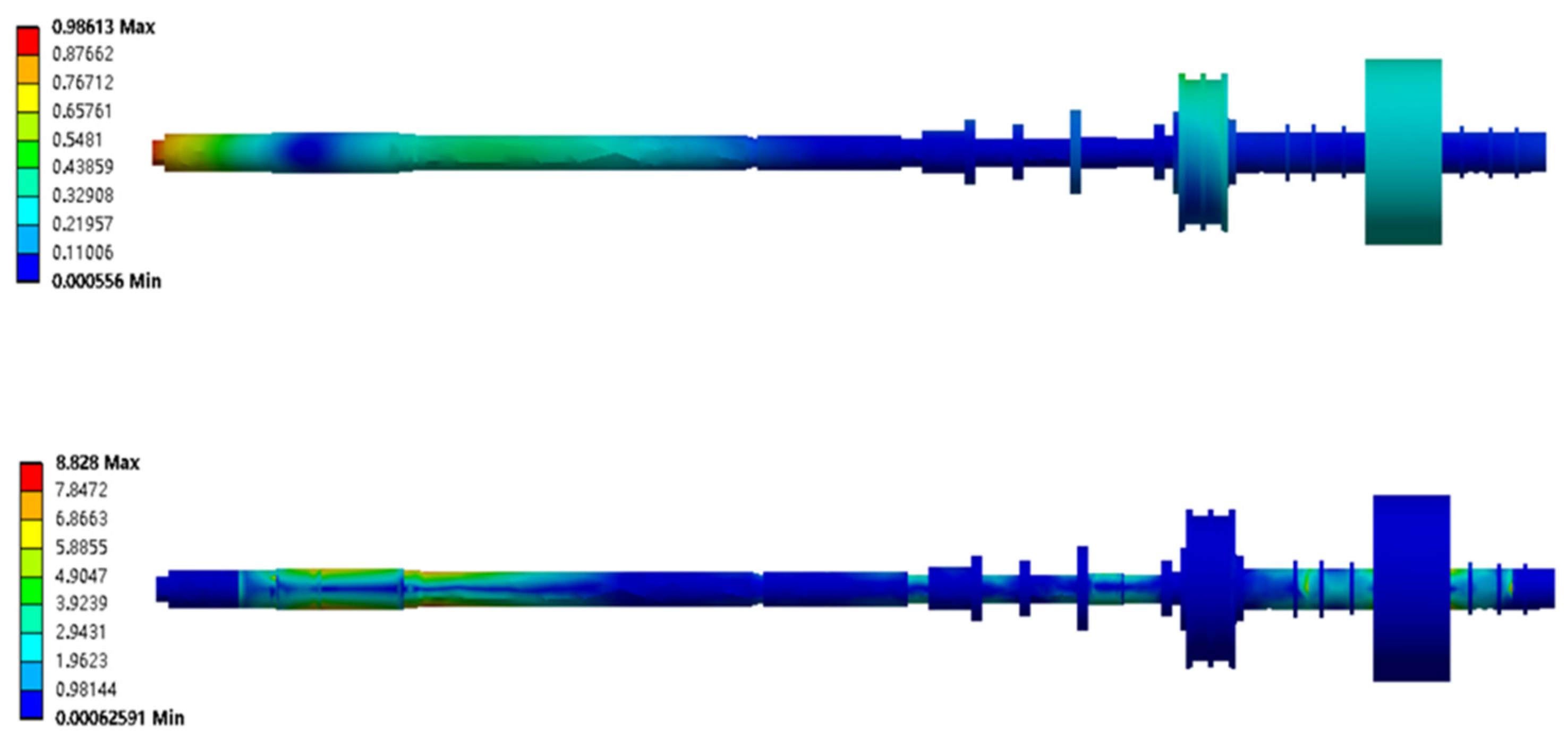
3.2. Analysis of Impact Response Results
4. Time-History Method for Impact Resistance Calculation
4.1. Shock Spectrum Calculation
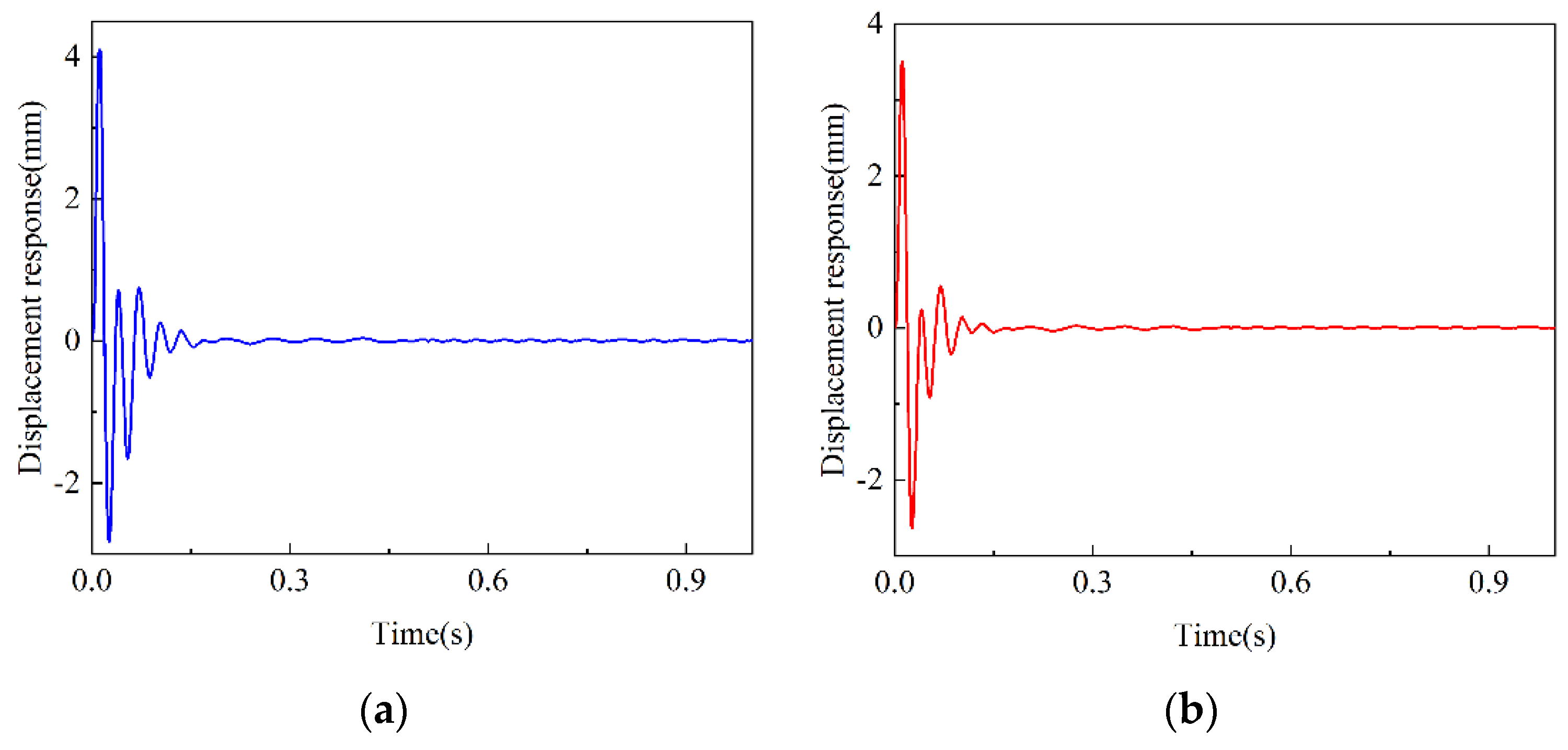
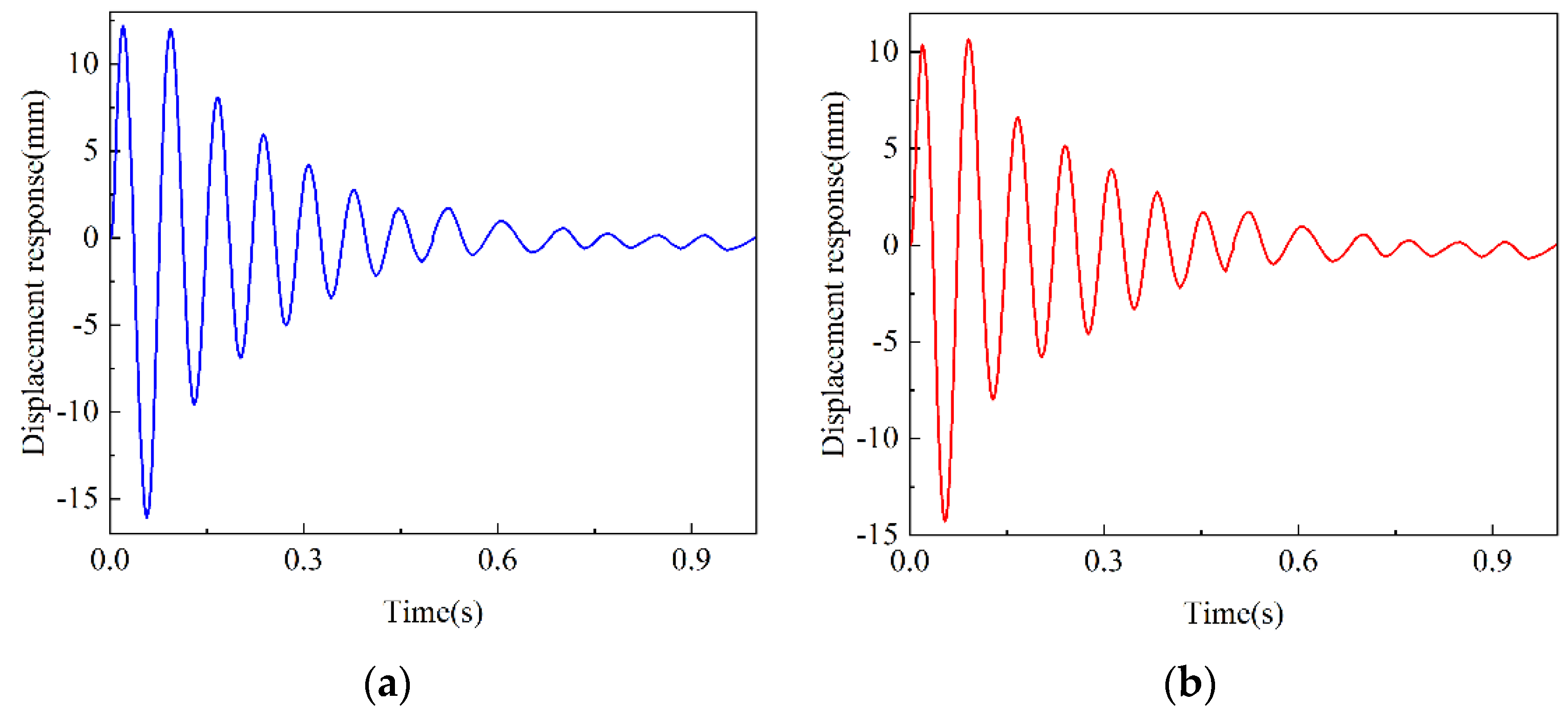
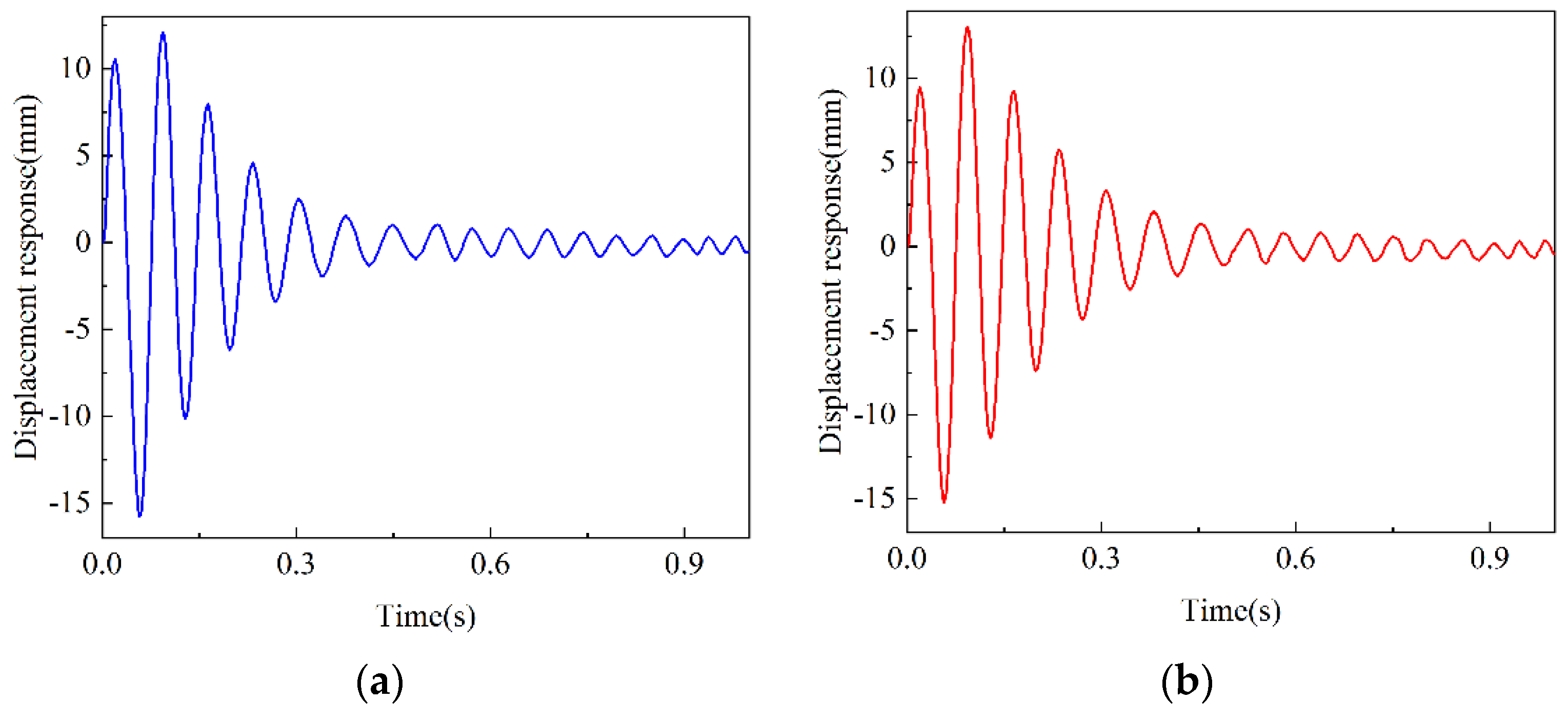
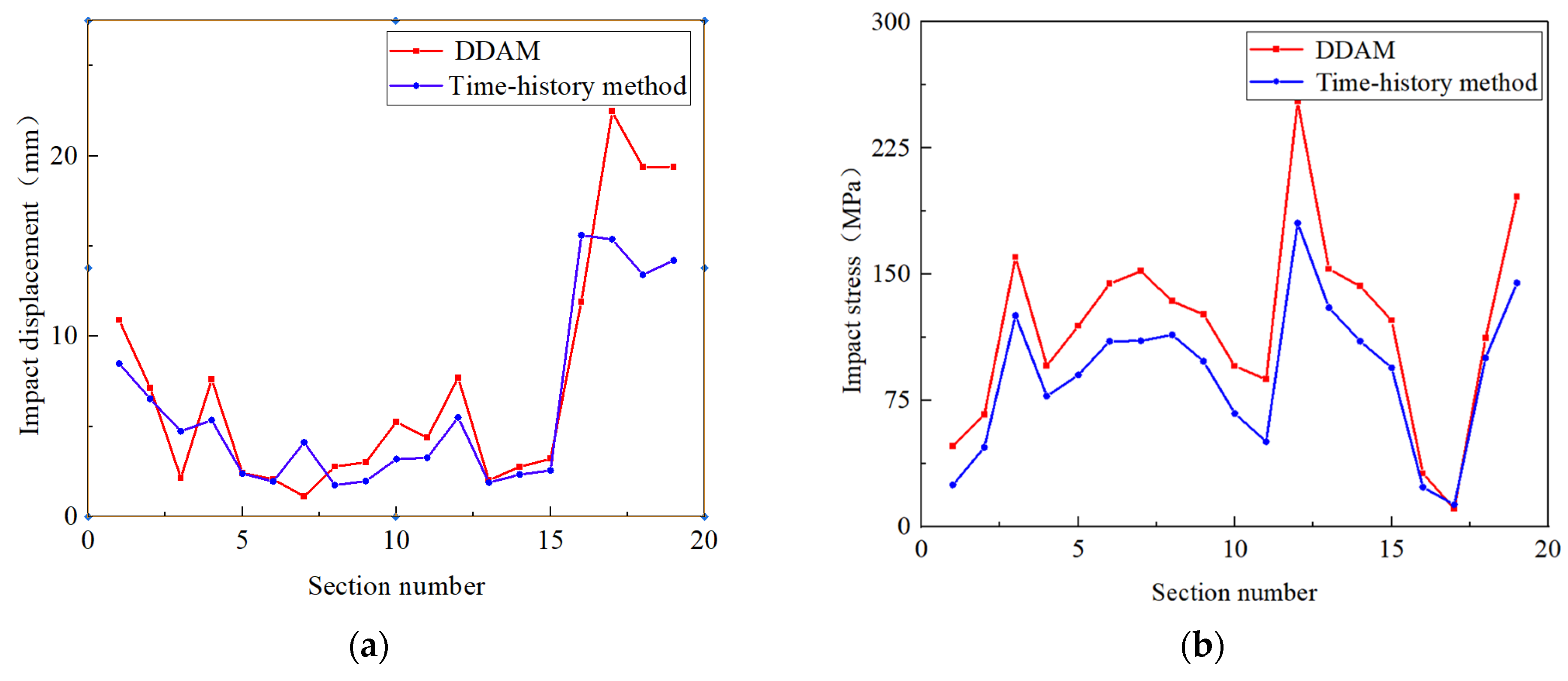
4.2. Impact Response Result Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cheng, S.; Wang, S.; Chen, G. Evaluation Study on Shock Damage of Ship Subjected to Blasting Warhead Far-Field Underwater Explosion. Chin. J. Ship Res. 2014, 9, 19–25. [Google Scholar] [CrossRef]
- Liu, W.; Lin, T.; He, Z. Analysis of Shock Resistance on GWC6066 Marine Gearbox. Appl. Mech. Mater. 2014, 602, 135–138. [Google Scholar] [CrossRef]
- Hao, E.; Liu, Y.Z.; Liu, C.G. Numerical simulation of monopile foundation of an offshore wind turbine subjected to ship impact. J. Vib. Shock 2015, 34, 7–13. [Google Scholar] [CrossRef]
- Zhang, W.; Yao, X.; Wang, Z.; Wang, Y. Research on shock resistance of shipborne equipment based on multibody system discrete-time transfer matrix method. Ships Offshore Struct. 2022, 17, 1522–1531. [Google Scholar] [CrossRef]
- Wang, X.; Li, X.; Ma, X.; Du, G. Numerical analysis on spectrum dip characteristics of shock response spectrum of submarine equipment. Chin. J. Ship Res. 2019, 14, 31–37. [Google Scholar] [CrossRef]
- Hu, H.; Zhou, R.; Zhou, Z.; Liu, Y. Analysis and optimization of resistance characteristics of submarine snorkel air-intake valve. Chin. J. Ship. Res. 2019, 14, 85–89. [Google Scholar] [CrossRef]
- Hong, S.; Wang, W. Research on impact resistance of ship launching device. Ship. Elect. Eng. 2010, 30, 169–171. [Google Scholar] [CrossRef]
- He, X.; Li, G.; Xing, P.; Lu, L.; Gao, H.; Zhang, H.; Wang, G. Experimental and numerical investigation on dynamic characteristics of ship propulsion shafting under uncertainty based on displacement response. Ocean Eng. 2021, 237, 109637. [Google Scholar] [CrossRef]
- Liang, C.; Yang, M.; Tai, Y. Prediction of shock response for a quadrupod-mast using response spectrum analysis method. Ocean Eng. 2002, 29, 887–914. [Google Scholar] [CrossRef]
- Camargo, F. Survey on Experimental and Numerical Approaches to Model Underwater Explosions. J. Mar. Sci. Eng. 2019, 7, 15. [Google Scholar] [CrossRef]
- Pang, F.; Qin, Y.; Tang, Y.; Gao, C.; Li, H. Experimental study on impact response of seaborne rocket launch platform. Ocean Eng. 2023, 280, 114623. [Google Scholar] [CrossRef]
- Zhu, J.; Wei, G.; Peng, Z.; Xia, Z.; Zheng, L.; Zhu, H. Analysis of underwater explosion shock on ship shaft stern bearing lubrication characteristics under different bearing working conditions. Int. J. Nav. Archit. Ocean Eng. 2022, 14, 100444. [Google Scholar] [CrossRef]
- Liang, P.; Li, X.; Guo, F.; Cao, Y.; Zhang, X.; Jiang, F. Influence of sea wave shock on transient start-up performance of water-lubricated bearing. Tribol. Int. 2022, 167, 107332. [Google Scholar] [CrossRef]
- Long, X.; Liu, L.; Ji, S. Discrete Element Analysis of Ice-Induced Vibrations of Offshore Wind Turbines in Level Ice. J. Mar. Sci. Eng. 2023, 11, 2153. [Google Scholar] [CrossRef]
- Huang, X.; Mao, J.; Luo, X.; Du, P.; Ouahsine, A. Dynamic Response of a Warship’s Metal-Jet-Damaged Double-Layer Plates Subjected to the Subsequent Underwater Explosion. J. Mar. Sci. Eng. 2024, 12, 854. [Google Scholar] [CrossRef]
- Ley, J.; Moctar, O. A Comparative Study of Computational Methods for Wave-Induced Motions and Loads. J. Mar. Sci. Eng. 2021, 9, 83. [Google Scholar] [CrossRef]
- Mannacio, F.; Barbato, A.; Marzo, F.; Gaiotti, M.; Rizzo, C.; Venturini, M. Shock effects of underwater explosion on naval ship foundations: Validation of numerical models by dedicated tests. Ocean Eng. 2022, 253, 111290. [Google Scholar] [CrossRef]
- Liu, Z.; Zhou, X.; Xiao, L.; Li, X.; Lin, F. Dynamic response and damage characteristics of special blast-resistant door structure subjected to underwater explosion. Struct 2023, 57, 105262. [Google Scholar] [CrossRef]
- Ni, B.; Chen, Z.; Zhong, K.; Li, X.; Xue, Y.Z. Numerical Simulation of a Polar Ship Moving in Level Ice Based on a One-Way Coupling Method. J. Mar. Sci. Eng. 2020, 8, 692. [Google Scholar] [CrossRef]
- Cao, J.; Sun, F.; Shen, S.; Sun, W.; Ye, X. Analysis of impact resistance and influencing factors of sleeve-type hydraulic coupling based on DDAM. Ship Sci. Technol. 2023, 45, 51–57. [Google Scholar] [CrossRef]
- Paul, G.; Steven, L. Auxiliary turbine generator set isolation system design for us naval vessel. In Turbo Expo: Power for Land, Sea, and Air; American Society of Mechanical Engineers: New York, NY, USA, 2012. [Google Scholar] [CrossRef]
- Hu, H.; Li, X.; Wang, C.; Rheem, C.; Chen, W. Study on the flooding characteristics of damaged barges with dynamic explosive deformation. Int. J. Nav. Archit. Ocean Eng. 2024, 16, 100589. [Google Scholar] [CrossRef]
- Kwak, M.; Yoon, J.; Park, S.; Kwon, S.; Shin, Y.; Noh, Y. Extent of damage analysis of naval ships subject to internal explosions. Int. J. Nav. Archit. Ocean Eng. 2023, 15, 100514. [Google Scholar] [CrossRef]
- Xie, Z.; He, S.; Wu, X. Anti-shock optimization of a certain gas turbine foundation by DDAM. Adv. Mat. Res. 2010, 129, 376–380. [Google Scholar] [CrossRef]
- Rakotomalala, Q.; Khoun, L.; Leblond, C.; Sigrist, J. An advanced semi-analytical model for the study of naval shock problems. J. Sound Vibr. 2021, 511, 116317. [Google Scholar] [CrossRef]
- Cui, L.; Zhou, R.; Wang, S.; Chen, Y. Research on Shock Resistance of Ship Propulsion Shafting with Flexible Coupling. Ship Build. China 2023, 64, 61–72. [Google Scholar] [CrossRef]
- Kim, J.; Park, Y.; Park, M.; Lee, J.; An, S. Evaluation of the Shock Resistance of a Gas Turbine Package. Trans. Korean Soc. Mech. Eng. A 2017, 41, 1005–1009. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, X.; Wang, M.; Wu, Y.; Dai, Y. Torsional-longitudinal impact response of ship propulsion shafting system. J. Vib. Shock 2017, 36, 96–102. [Google Scholar] [CrossRef]
- Wang, Y.; Yu, R.; Chen, R. Shock Response Analysis for a Propulsion Shaft System in Time Domain. Appl. Mech. Mater. 2011, 58, 2534–2539. [Google Scholar] [CrossRef]
- Küçükarslan, S. Time domain dynamic analysis of piles under impact loading. Soil Dyn. Earthq. Eng. 2002, 22, 97–104. [Google Scholar] [CrossRef]
- Liu, T.; Wang, J.; Liu, K.; Zhao, X. Experimental and Numerical Prediction of Slamming Impact Loads Considering Fluid–Structure Interactions. J. Mar. Sci. Eng. 2024, 12, 733. [Google Scholar] [CrossRef]
- Zhao, N.; Zhang, J.; Ma, W.; Jiang, Z.; Mao, Z. Variational time-domain decomposition of reciprocating machine multi-impact vibration signals. Mech. Syst. Signal Proc. 2022, 172, 108977. [Google Scholar] [CrossRef]
- Zhu, L.; Duan, L.; Chen, M.; Yu, T.; Pedersen, P. Equivalent design pressure for ship plates subjected to moving slamming impact loads. Mar. Struct. 2020, 71, 102741. [Google Scholar] [CrossRef]
- Piscopo, V.; Scamardella, A.; Rossi, G.; Crenna, F.; Berardengo, M. Fatigue Assessment of Moorings for Floating Offshore Wind Turbines by Advanced Spectral Analysis Methods. J. Mar. Sci. Eng. 2022, 10, 37. [Google Scholar] [CrossRef]
- Wang, Q.; Yu, P.; Chang, X.; Fan, G.; He, G. Research on the bow-flared slamming load identification method of a large container ship. Ocean Eng. 2022, 266, 113142. [Google Scholar] [CrossRef]
- Zhang, B.; Dong, R.; Li, W.; Zhao, Y.; Wang, G.; Zhang, D. Numerical Simulation of Extreme Ice Loads on Complex Pile Legs of Offshore Substation Structures. J. Mar. Sci. Eng. 2024, 12, 838. [Google Scholar] [CrossRef]
- Zhao, W.; Leira, B.; Høyland, K.; Kim, E.; Feng, G.; Ren, H. A Framework for Structural Analysis of Icebreakers during Ramming of First-Year Ice Ridges. J. Mar. Sci. Eng. 2024, 12, 611. [Google Scholar] [CrossRef]
- Wang, C.; Gong, J.; Zhang, Y.; Liu, L.; Lou, M. Investigating Load Calculation for Broken Ice and Cylindrical Structures Using the Discrete Element Method. J. Mar. Sci. Eng. 2024, 12, 395. [Google Scholar] [CrossRef]
- Chung, J.; Shin, Y. Simulation of dynamic behaviour of high-speed catamaran craft subjected to underwater explosion. Ships Offshore Struct. 2014, 9, 387–403. [Google Scholar] [CrossRef]
- Sigrist, J.; Broc, D. A versatile method to calculate the response of equipment mounted on ship hulls subjected to underwater shock waves. Finite Elem. Anal. Des. 2023, 218, 103917. [Google Scholar] [CrossRef]
- Iakovlev, S.; Gaudet, J.; Dooley, G.; MacDonald, B. Hydrodynamic fields induced by the shock response of a fluid-filled submerged cylindrical shell containing a rigid co-axial core. J. Sound Vibr. 2010, 329, 3359–3381. [Google Scholar] [CrossRef]
- Iakovlev, S. Submerged fluid-filled cylindrical shell subjected to a shock wave: Fluid–structure interaction effects. J. Fluids Struct. 2001, 23, 117–142. [Google Scholar] [CrossRef]
- Tonder, J.; Venter, M.; Venter, G. A novel method for resolving non-unique solutions observed in fitting parameters to the Mooney Rivlin material model. Finite Elem. Anal. Des. 2023, 225, 104006. [Google Scholar] [CrossRef]
- Yao, Q.; Dong, P.; Zhao, Z.; Li, Z.; Wei, T.; Wu, J.; Li, W. Temperature dependent tensile fracture strength model of rubber materials based on Mooney-Rivlin model. Eng. Fract. Mech. 2023, 292, 109646. [Google Scholar] [CrossRef]
- Gao, X.; Wang, Y. A new method for selecting and evaluating the hyperelastic model of tread rubber material under rolling contact condition. Int. J. Polym. Anal. Charact. 2024, 29, 15–41. [Google Scholar] [CrossRef]
- Gajewski, M.; Szczerba, R.; Jemioło, S. Modelling of elastomeric bearings with application of Yeoh hyperelastic material model. Procedia Eng. 2015, 111, 220–227. [Google Scholar] [CrossRef]
- GJB1060.1-91; General Requirement for Environmental Conditions of Naval Ships Mechanical Environments. National Defense Science and Technology Commission: Beijing, China, 1991.
- BV043-85; Naval Vessel Construction Specifications. Federal German Armed Forces: Berlin, Germany, 1985.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Part | Density/kg·m−3 | Young’s Modulus/Pa | Poisson’s Ratio |
|---|---|---|---|
| active and passive flanges | 7850 | 2.0 × 1011 | 0.3 |
| diaphragm assembly | 7850 | 2.0 × 1011 | 0.3 |
| rubber material components | 1749 | 2.4 × 107 | 0.45 |
| No. | Name | Position (mm) | Load (kN) |
|---|---|---|---|
| 1 | after stern bearing | 2048 | 86.02 |
| 2 | before stern bearing | 8299 | 13.95 |
| 3 | thrust bearing | 11,727 | 43.72 |
| 4 | the rear end of the motor bearing | 14,242 | 111.62 |
| 5 | the front end of the motor bearing | 16,758 | 63.91 |
| No. | Impact Direction | Elastic Design | Elasto-Plastic Design | ||
|---|---|---|---|---|---|
| hull area | vertical | 1.0 | 0.5 | ||
| transverse | 1.0 | 0.5 | |||
| longitudinal | 0.4 | 0.2 | |||
| deck area | vertical | 0.5 | 0.25 | ||
| transverse | 1.0 | 0.5 | |||
| longitudinal | 0.4 | 0.2 | |||
| external plate | vertical | 5.0 | not allowed | ||
| transverse | 1.0 | ||||
| longitudinal | 0.4 | ||||
| No. | Longitudinal | Vertical | Transverse | |||
|---|---|---|---|---|---|---|
| Frequency (Hz) | Design Acceleration (m/s2) | Frequency (Hz) | Design Acceleration (m/s2) | Frequency (Hz) | Design Acceleration (m/s2) | |
| 1 | 6.327 | 38.926 | 6.564 | 100.957 | 17.319 | 261.886 |
| 2 | 21.349 | 131.350 | 17.387 | 257.981 | 22.759 | 350.058 |
| 3 | 25.146 | 154.705 | 21.349 | 322.577 | 38.871 | 593.228 |
| 4 | 48.199 | 296.546 | 39.121 | 601.436 | 46.731 | 718.776 |
| 5 | 51.030 | 309.160 | 51.709 | 791.078 | 60.354 | 927.460 |
| 6 | 55.612 | 295.624 | 60.520 | 930.138 | 74.221 | 1141.618 |
| 7 | 60.029 | 369.333 | 78.374 | 1205.458 | 81.133 | 1247.905 |
| 8 | 81.133 | 499.172 | 87.509 | 1346.000 | 88.004 | 1353.592 |
| 9 | 90.950 | 559.571 | 94.772 | 1457.701 | 91.035 | 1400.228 |
| 10 | 97.222 | 598.105 | 107.616 | 1655.231 | 101.643 | 1562.395 |
| Location | Maximum Transient Displacement (mm) | Maximum Instantaneous Stress (MPa) | ||||
|---|---|---|---|---|---|---|
| Longitudinal | Vertical | Transverse | Longitudinal | Vertical | Transverse | |
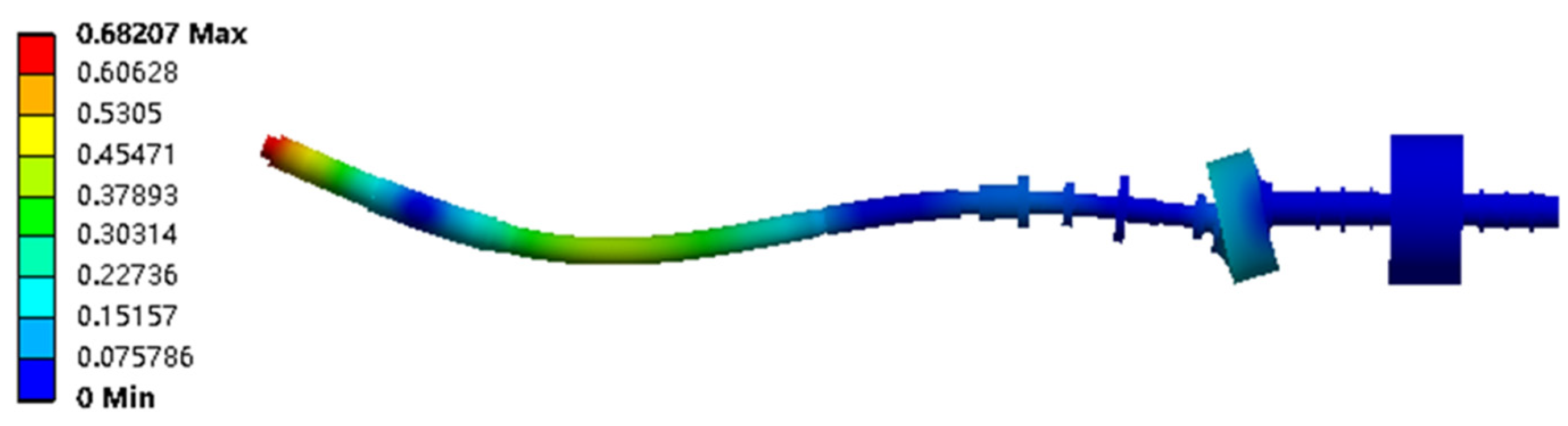
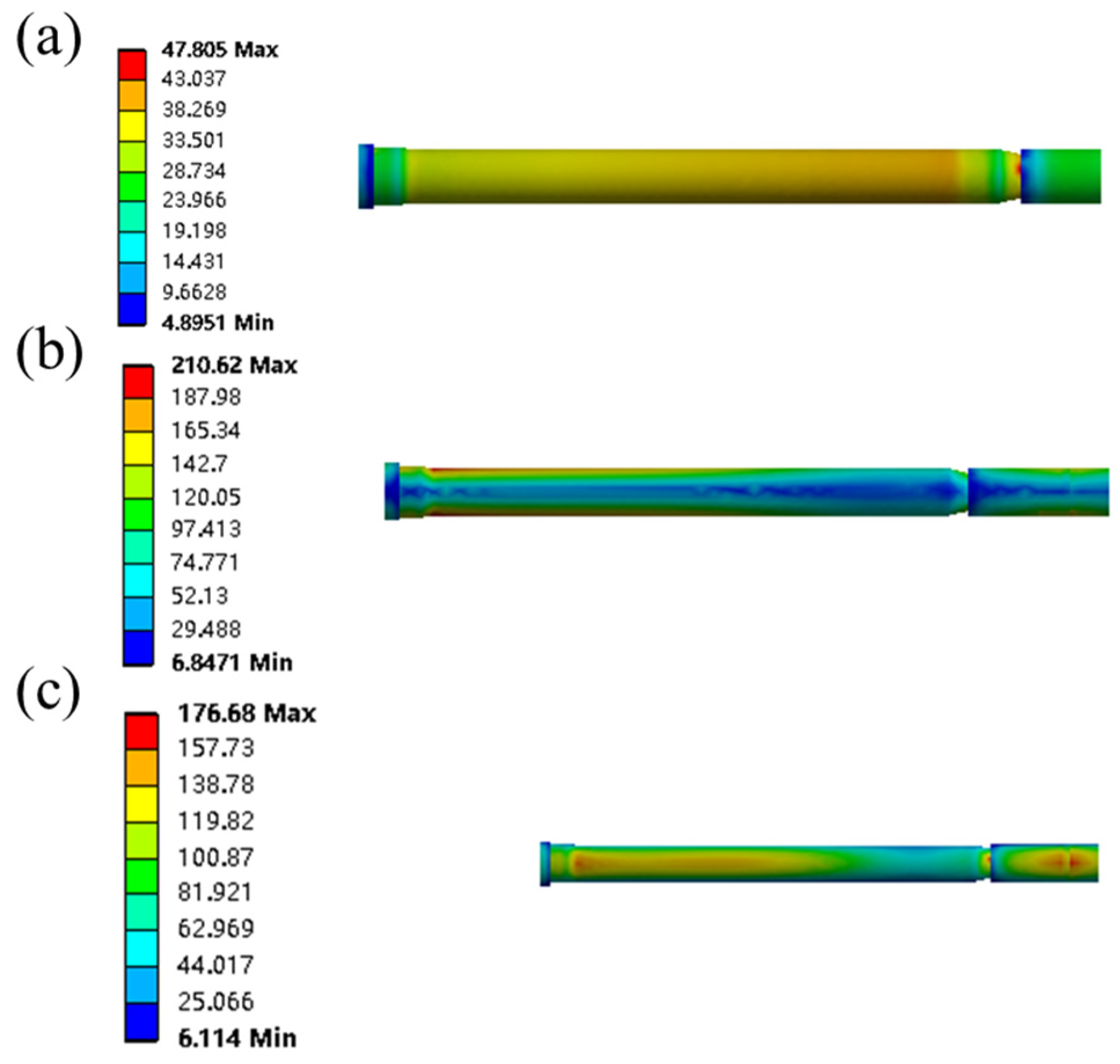
| center of gravity of the propeller | 2.38 | 10.90 | 7.99 | 44.71 | 47.82 | 43.07 |
| after stern bearing support point | 2.89 | 2.16 | 1.57 | 14.55 | 160.21 | 123.08 |
| before the stern bearing support point | 1.34 | 1.12 | 0.79 | 23.38 | 151.95 | 137.52 |
| thrust bearing support point | 1.10 | 7.70 | 5.77 | 7.92 | 252.67 | 174.22 |
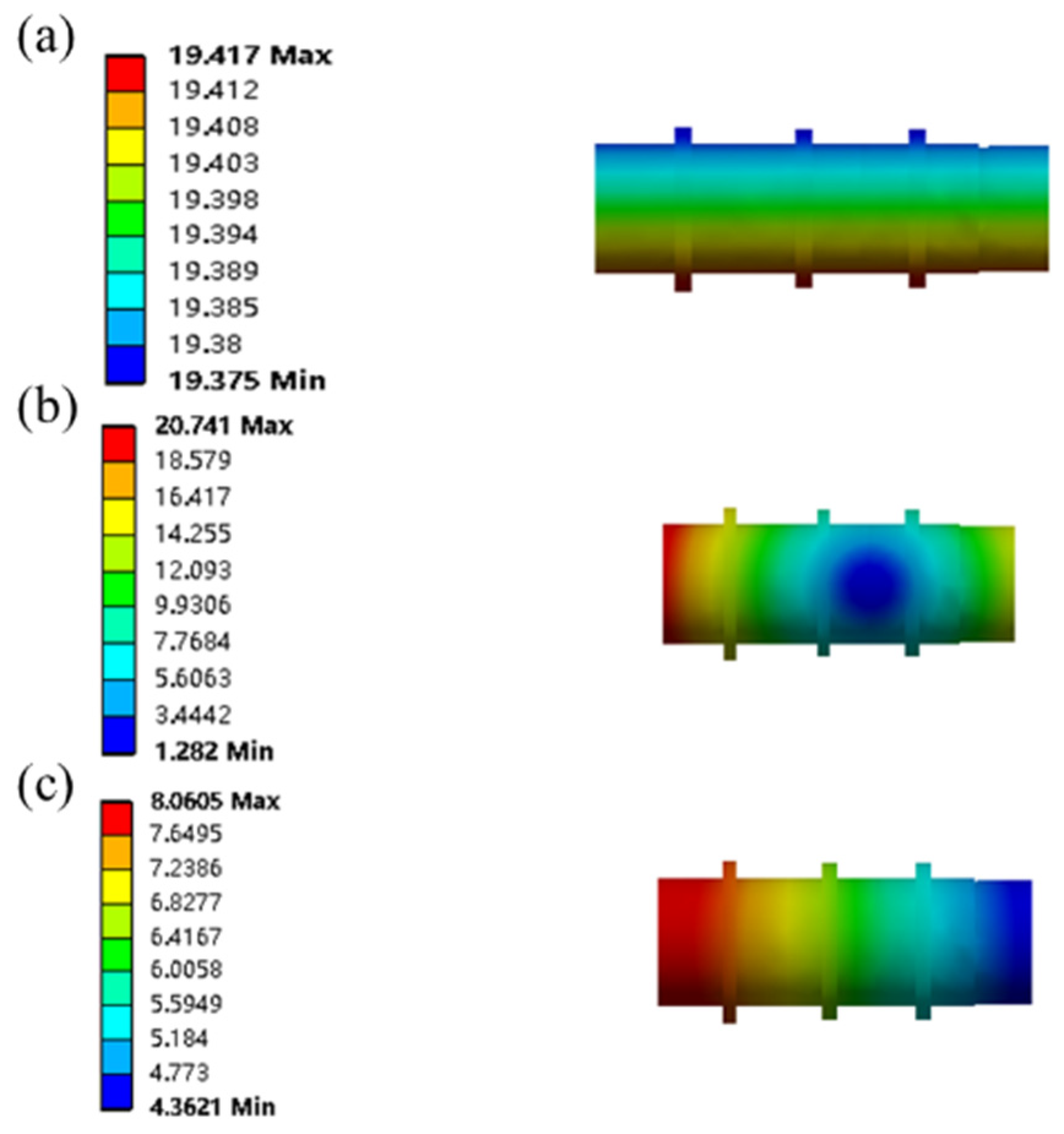
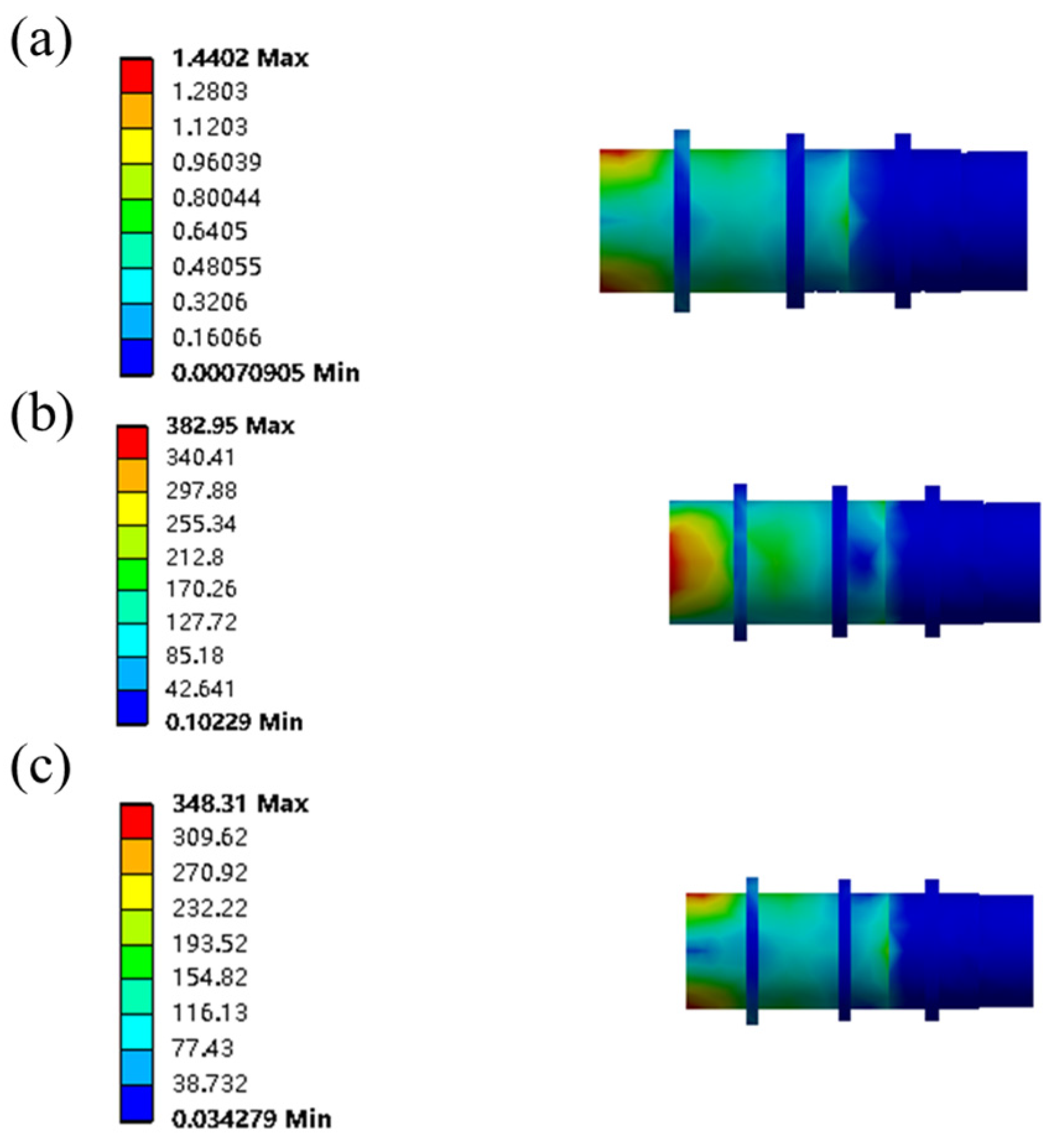
| high-elasticity coupling rear end | 0.97 | 11.91 | 7.70 | 7.55 | 31.7 | 19.14 |
| high-elasticity coupling front end | 4.23 | 22.47 | 11.72 | 5.86 | 10.8 | 9.19 |
| motor 1# bearing support point | 4.04 | 19.39 | 6.41 | 4.29 | 111.98 | 78.22 |
| motor 2# bearing support point | 5.95 | 19.41 | 6.16 | 0.77 | 196.28 | 205.64 |
| Time-History Curve Parameter | Vertical | Transverse |
|---|---|---|
| a2 (mm/s2) | 695,028.4 | 608,149.9 |
| t2 (s) | 0.0029 | 0.0028 |
| t3 (s) | 0.0072 | 0.0070 |
| a4 (mm/s2) | −187,531.4 | −208,955.3 |
| t4 (s) | 0.0232 | 0.0194 |
| t5 (s) | 0.0339 | 0.0276 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Y.; Zhou, R.; Ma, Z.; Wang, J.; Yan, Z. Analysis of the Impact Resistance Characteristics of a Power Propulsion Shaft System Containing a High-Elasticity Coupling. Appl. Sci. 2024, 14, 4995. https://doi.org/10.3390/app14124995
Guo Y, Zhou R, Ma Z, Wang J, Yan Z. Analysis of the Impact Resistance Characteristics of a Power Propulsion Shaft System Containing a High-Elasticity Coupling. Applied Sciences. 2024; 14(12):4995. https://doi.org/10.3390/app14124995
Chicago/Turabian StyleGuo, Yukuo, Ruiping Zhou, Zhaozhao Ma, Jianzheng Wang, and Ziteng Yan. 2024. "Analysis of the Impact Resistance Characteristics of a Power Propulsion Shaft System Containing a High-Elasticity Coupling" Applied Sciences 14, no. 12: 4995. https://doi.org/10.3390/app14124995
APA StyleGuo, Y., Zhou, R., Ma, Z., Wang, J., & Yan, Z. (2024). Analysis of the Impact Resistance Characteristics of a Power Propulsion Shaft System Containing a High-Elasticity Coupling. Applied Sciences, 14(12), 4995. https://doi.org/10.3390/app14124995