
Research on Hybrid Vibration Sensor for Measuring Downhole Drilling Tool Vibrational Frequencies

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Structure and Principle
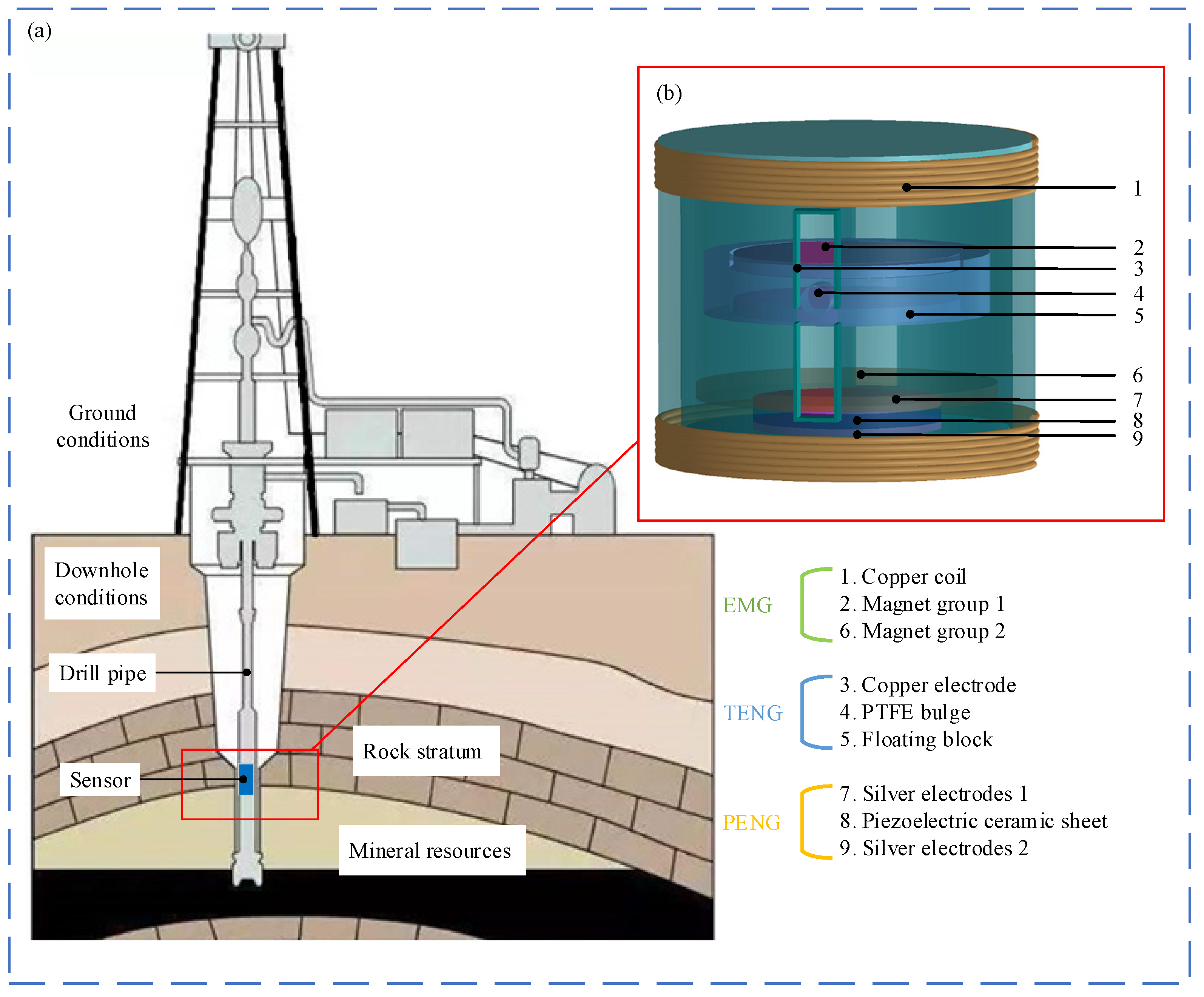
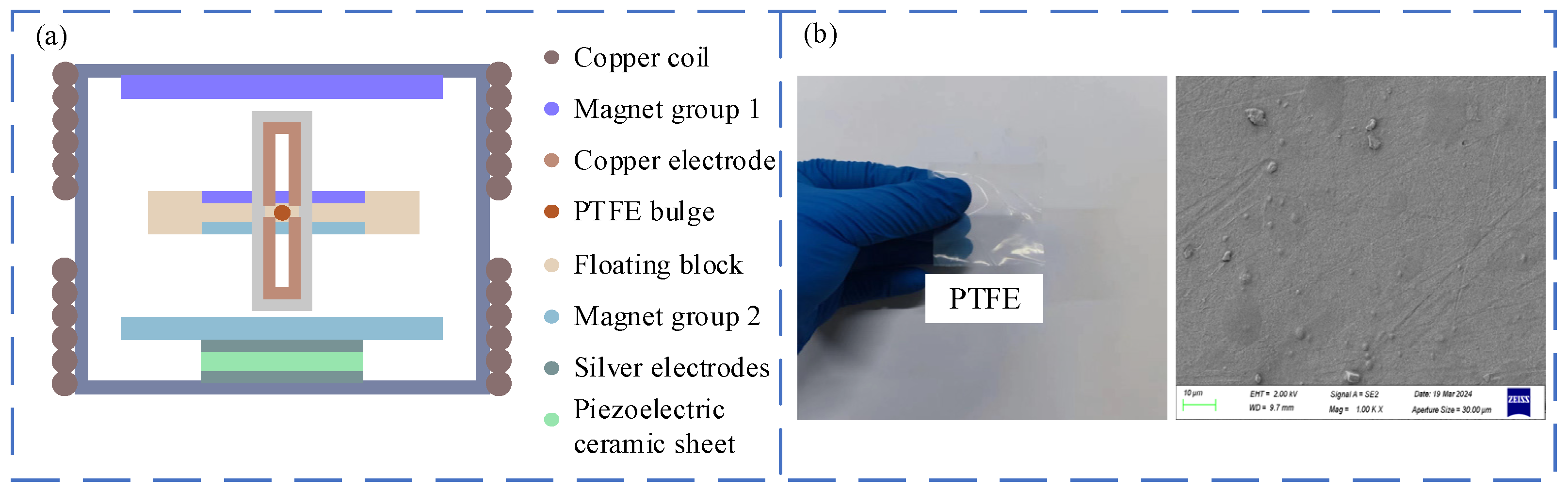
2.1. Structure Composition of HDV-TENG
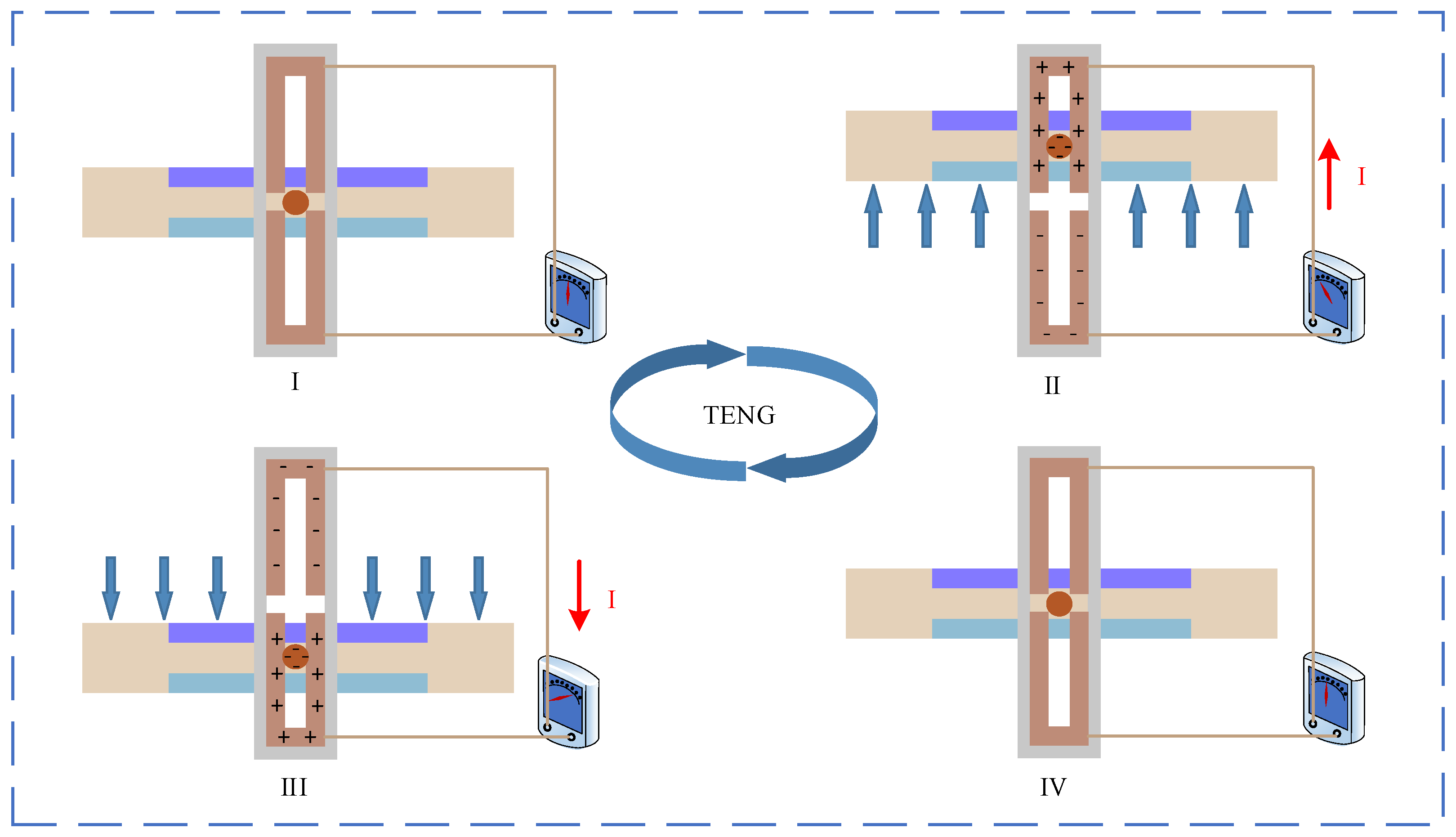
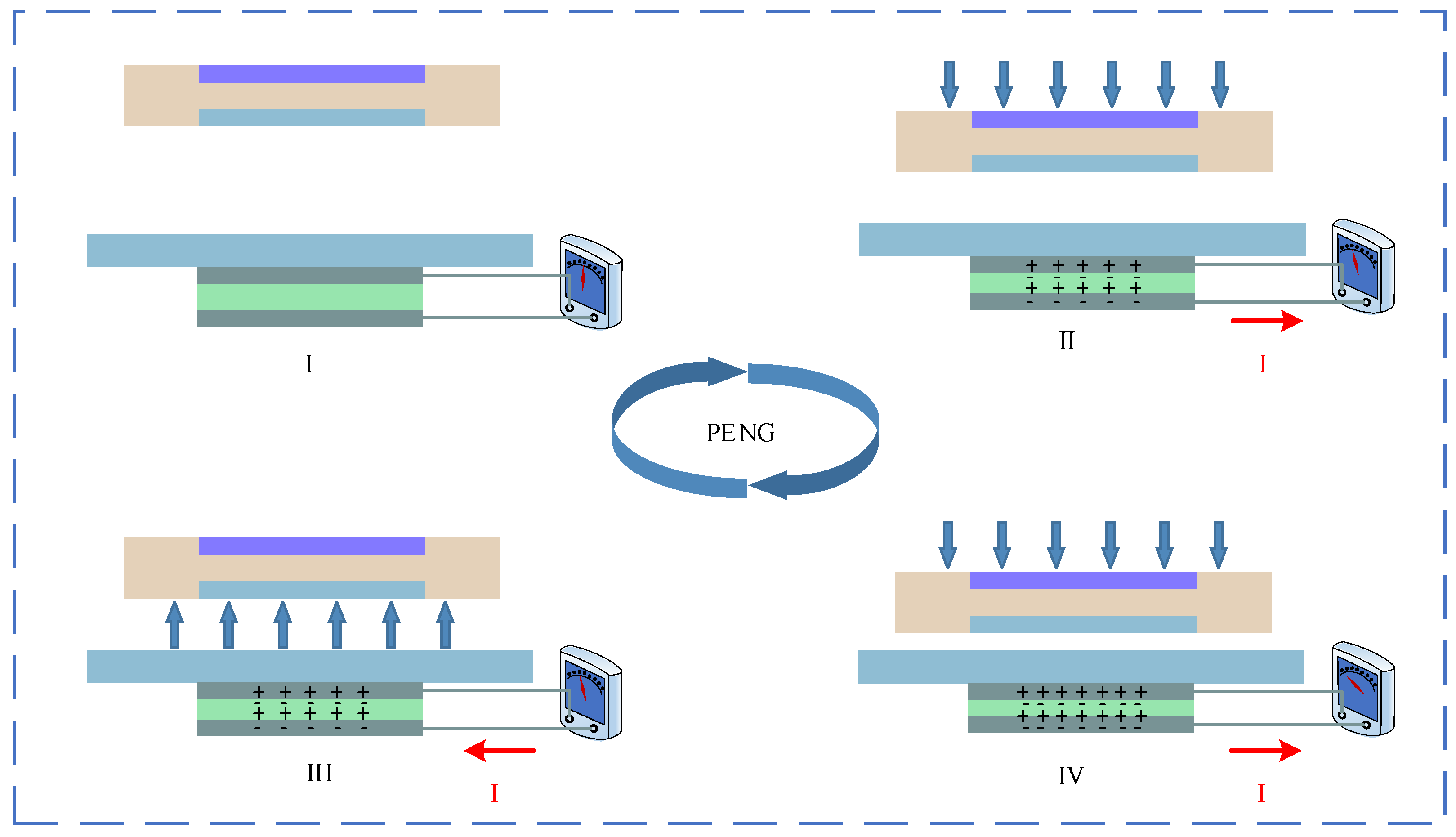
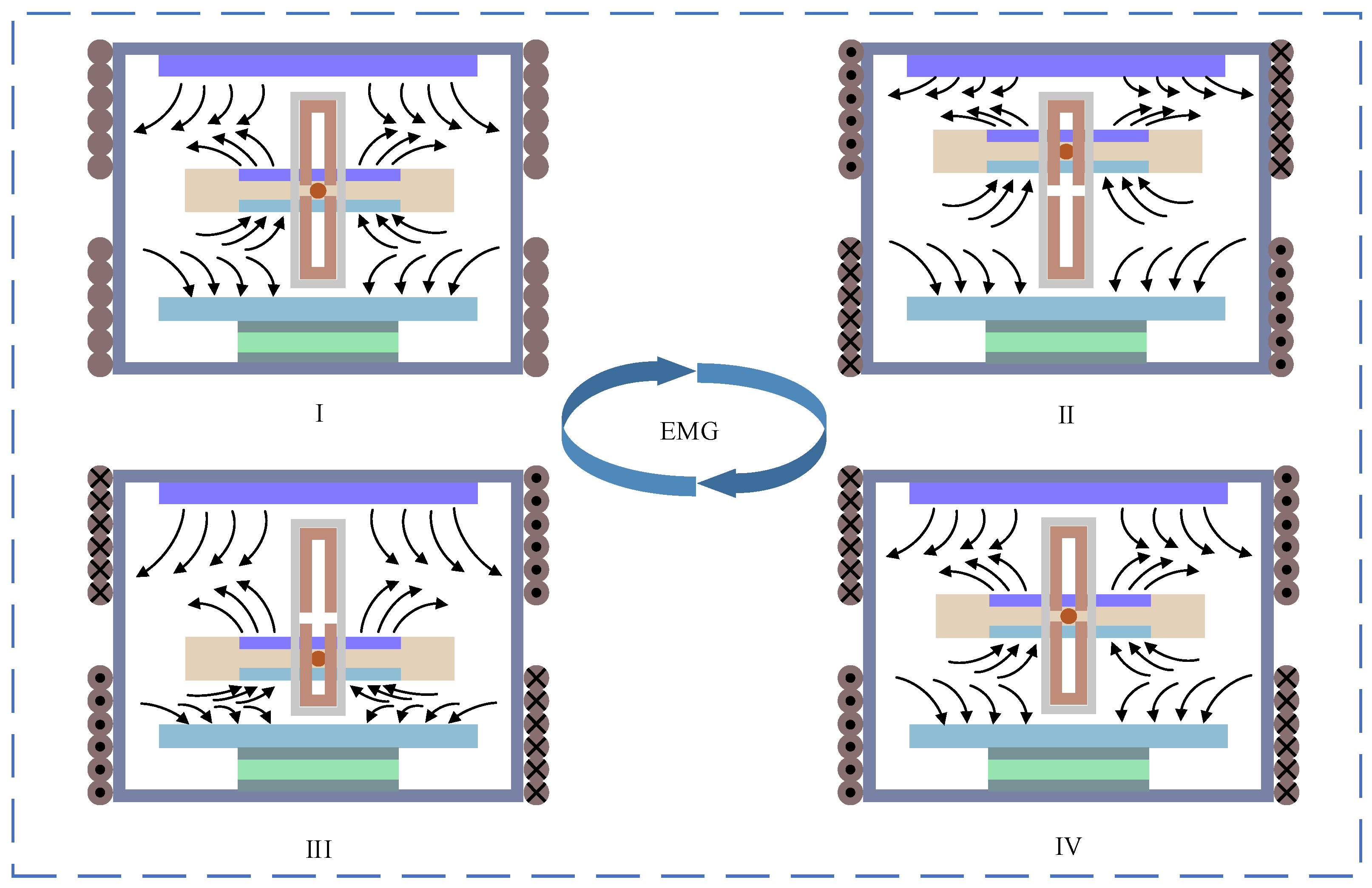
2.2. Working Principle of HDV-TENG
3. Experiments
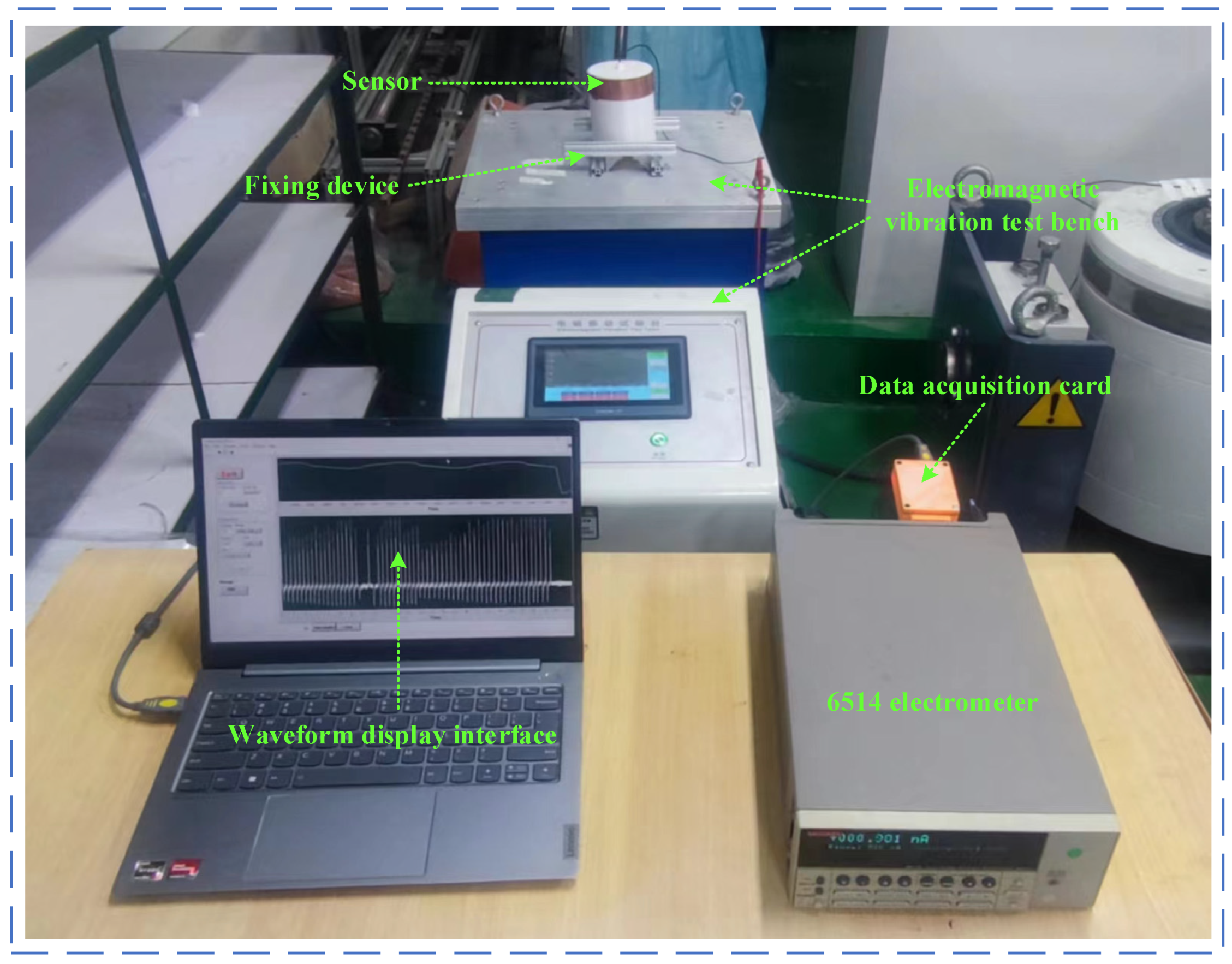
3.1. Experiment Platform
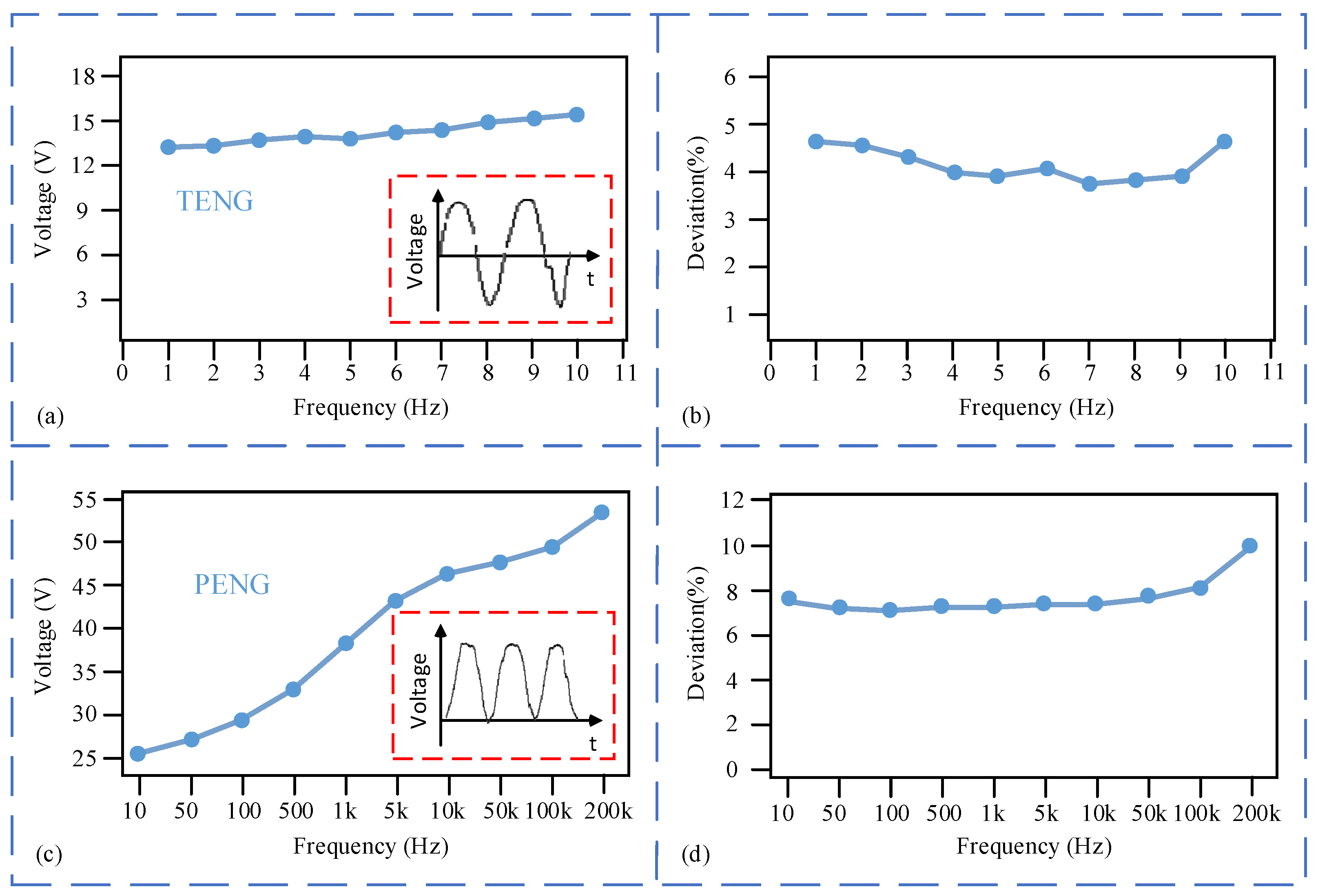
3.2. Sensing Performance Experiments
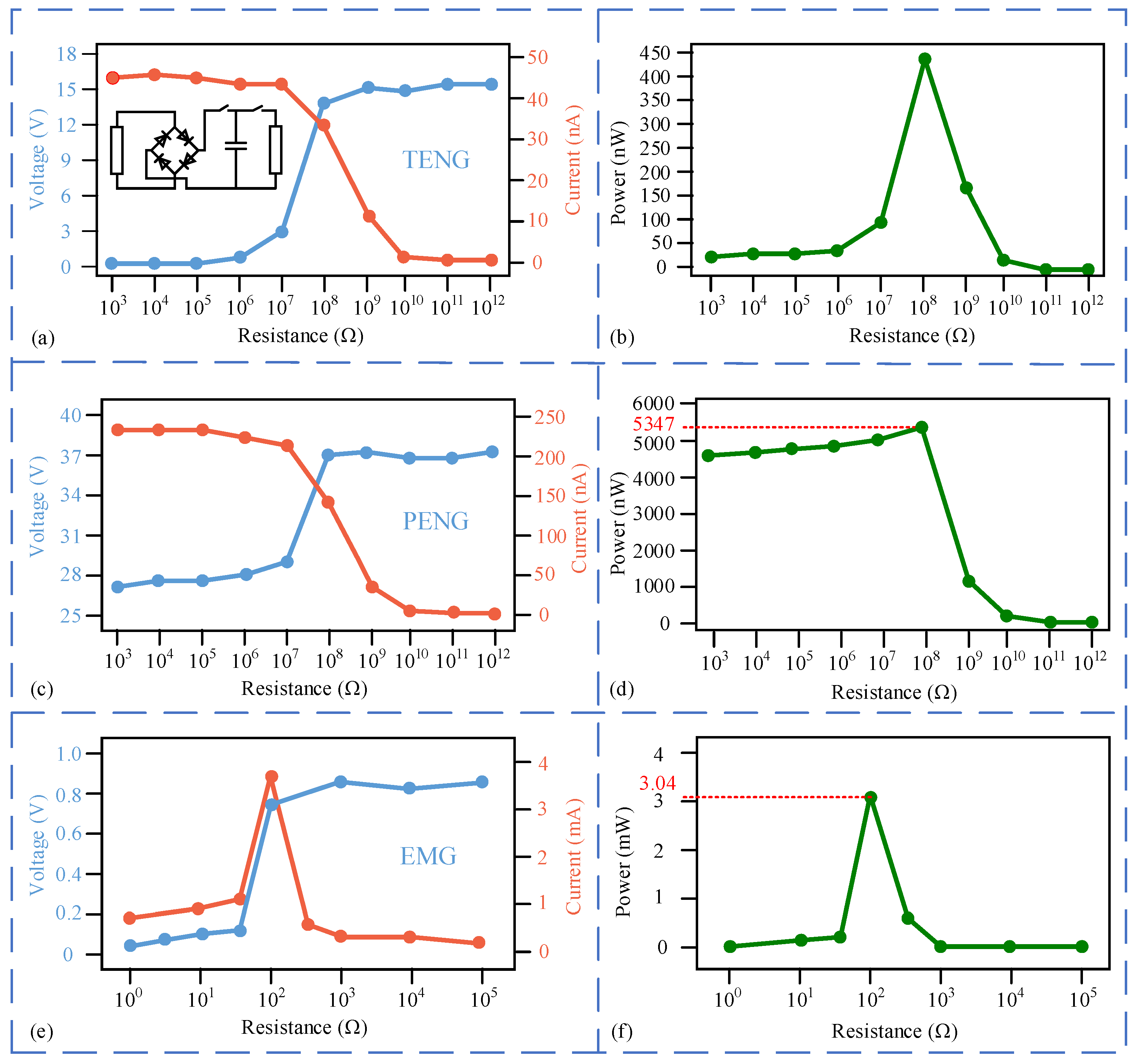
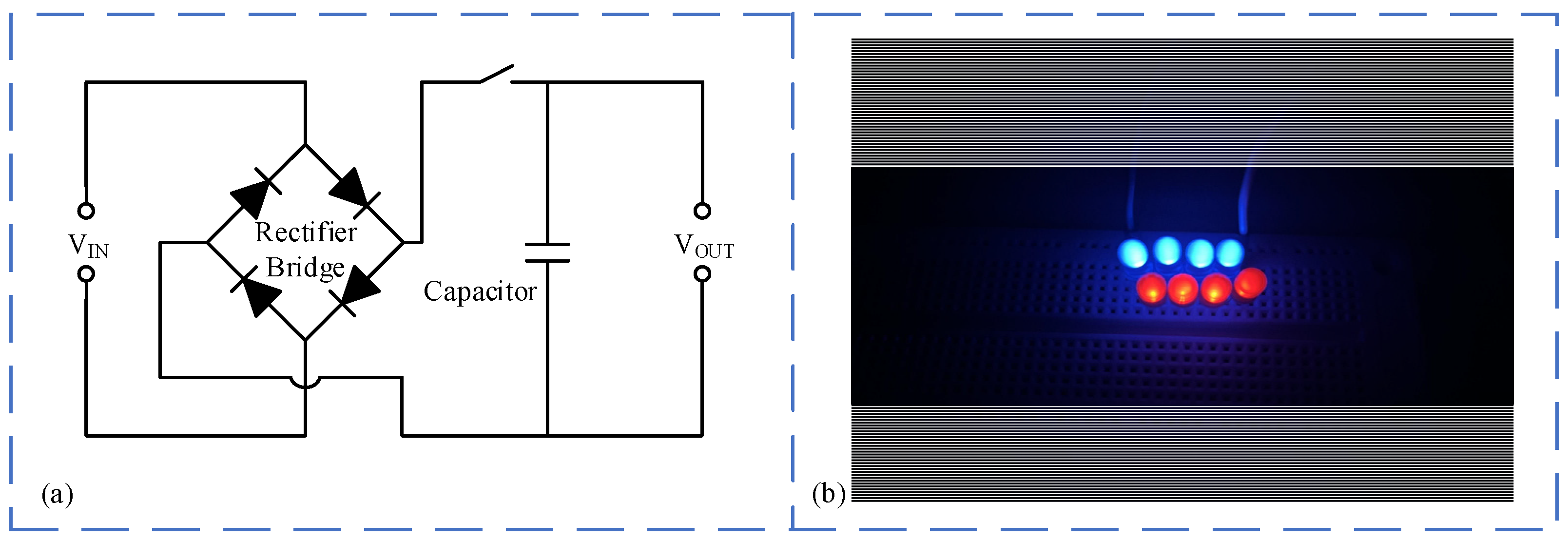
3.3. Power Generation Performance Experiments
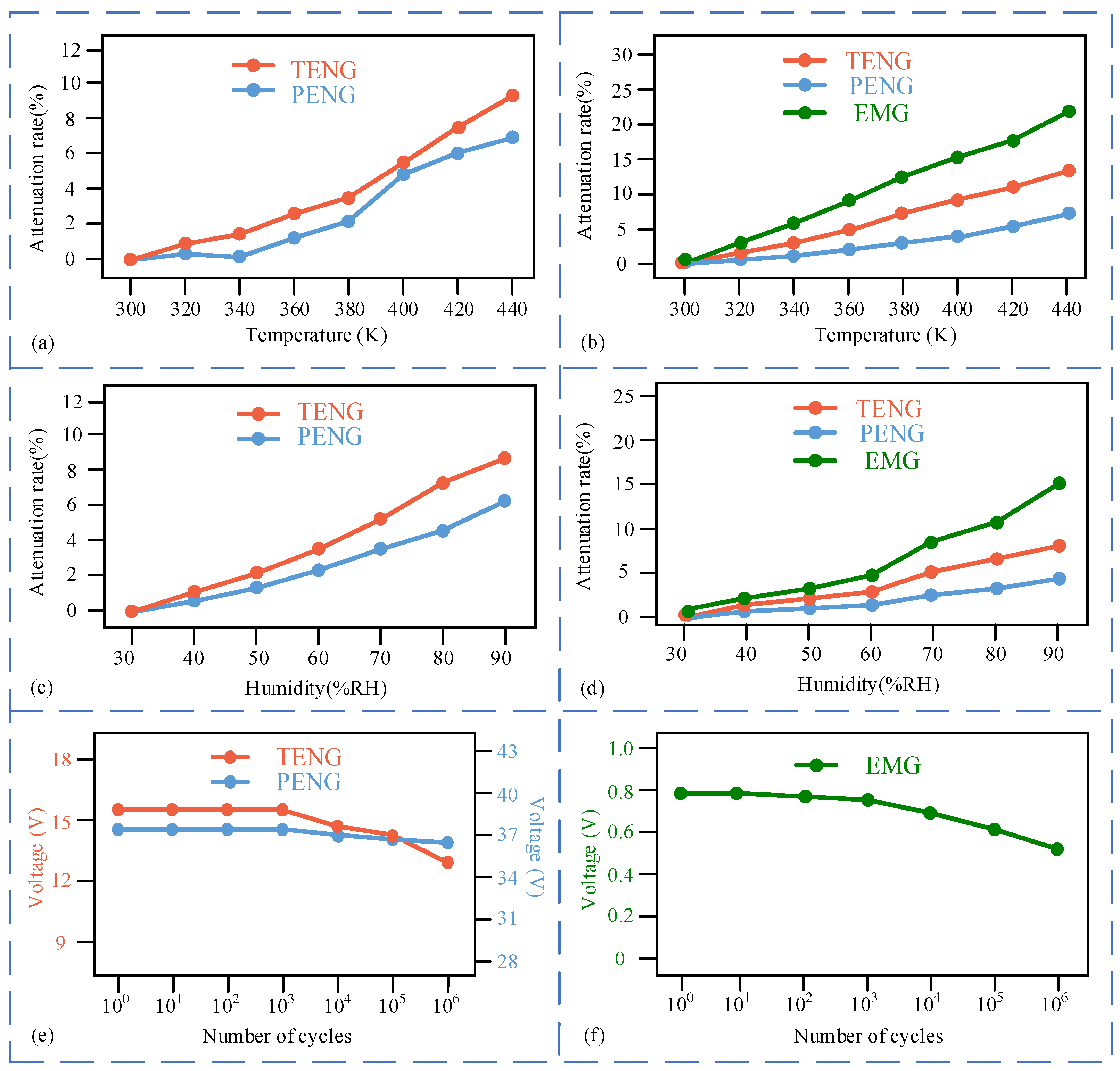
3.4. Stability Experiments
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Oseh, J.O.; Mohd, N.M.N.A.; Gbadamosi, A.O.; Agi, A.; Blkoor, S.O.; Ismail, I.; Igwilo, K.C.; Igbafe, A.I. Polymer nanocomposites application in drilling fluids: A review. Geoenergy Sci. Eng. 2023, 222, 211416. [Google Scholar] [CrossRef]
- Guo, J.; Wan, J.L.; Yang, Y.; Dai, L.; Tang, A.; Huang, B.; Zhang, F.; Li, H. A deep feature learning method for remaining useful life prediction of drilling pumps. Energy 2023, 282, 128442. [Google Scholar] [CrossRef]
- Li, Y.; Wang, J.; Shan, Y.; Wang, C.; Hu, Y. Measurement and analysis of downhole drill string vibration signal. Appl. Sci. 2021, 11, 11484. [Google Scholar] [CrossRef]
- Hohl, A.; Herbig, C.; Arevalo, P.; Reckmann, H.; Macpherson, J. Measurement of dynamics phenomena in downhole tools-requirements, theory and interpretation. In Proceedings of the IADC/SPE Drilling Conference and Exhibition, Fort Worth, TX, USA, 6–8 March 2018; OnePetro: Richardson, TX, USA, 2018. [Google Scholar]
- Mahjoub, M.; Nguyen, K.L.; Menand, S.; Tran, Q.T.; Andrianoely, M.A.; Manin, L.; Dufour, R.; Isbell, M. Dynamics Vibration Prediction and Comparison with Downhole Data Measurements in Unconventional Wells. In Proceedings of the IADC/SPE International Drilling Conference and Exhibition, Galveston, TX, USA, 3–5 March 2020; OnePetro: Richardson, TX, USA, 2020. [Google Scholar]
- Gou, Y.; Fu, X. Vibration and horizontal directivity analysis of transmitting transducer for acoustic logging while drilling. J. Geophys. Eng. 2021, 18, 379–391. [Google Scholar] [CrossRef]
- Klaic, M.; Murat, Z.; Staroveski, T.; Brezak, D. Tool wear monitoring in rock drilling applications using vibration signals. Wear 2018, 408, 222–227. [Google Scholar] [CrossRef]
- Baumgartner, T.; Ashok, P.; van Oort, E. Automated preprocessing techniques for high frequency downhole sensor data. In Proceedings of the SPE/IADC International Drilling Conference and Exhibition, The Hague, The Netherlands, 5–7 March 2019; OnePetro: Richardson, TX, USA, 2019. [Google Scholar]
- Wiktorski, E.; Geekiyanage, S.; Løken, E.; Sui, D. Comparative Study of Surface and Downhole Drillstring Vibrations Measurements on a Laboratory-Scale Drilling Rig. In Proceedings of the SPE Norway One Day Seminar, Bergen, Norway, 14 May 2019; OnePetro: Richardson, TX, USA, 2019. [Google Scholar]
- Millan, E.; Ringer, M.; Boualleg, R.; Li, D. Real-Time drillstring vibration characterization using machine learning. In Proceedings of the SPE/IADC International Drilling Conference and Exhibition, The Hague, The Netherlands, 5–7 March 2019; OnePetro: Richardson, TX, USA, 2019. [Google Scholar]
- Zha, Y.; Pham, S. Monitoring downhole drilling vibrations using surface data through deep learning. In SEG Technical Program Expanded Abstracts 2018; Society of Exploration Geophysicists: Houston, TX, USA, 2018; pp. 2101–2105. [Google Scholar]
- Wang, C.; Liu, G.; Yang, Z.; Li, J.; Zhang, T.; Jiang, H.; Cao, C. Downhole working conditions analysis and drilling complications detection method based on deep learning. J. Nat. Gas Sci. Eng. 2020, 81, 103485. [Google Scholar] [CrossRef]
- Zhang, H.; Di, Q.; Li, N.; Wang, W.; Chen, F. Measurement and simulation of nonlinear drillstring stick–slip and whirling vibrations. Int. J. Non-Linear Mech. 2020, 125, 103528. [Google Scholar] [CrossRef]
- Ren, F.; Fang, T.; Cheng, X. Theoretical modeling and experimental study of rock-breaking depth in particle jet impact drilling process. J. Pet. Sci. Eng. 2019, 183, 106419. [Google Scholar] [CrossRef]
- Fan, F.R.; Tian, Z.Q.; Wang, Z.L. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wu, C.; Wang, A.C.; Ding, W.; Guo, H.; Wang, Z.L. Triboelectric nanogenerator: A foundation of the energy for the new era. Adv. Energy Mater. 2019, 9, 1802906. [Google Scholar] [CrossRef]
- Rana, S.M.S.; Salauddin, M.; Sharifuzzaman, M.; Lee, S.H.; Shin, Y.D.; Song, H.; Jeong, S.H.; Bhatta, T.; Shrestha, K.; Park, J.Y. Ultrahigh-output triboelectric and electromagnetic hybrid generator for self-powered smart electronics and biomedical applications. Adv. Energy Mater. 2022, 12, 2202238. [Google Scholar] [CrossRef]
- Chen, H.; Xing, C.; Li, Y.; Wang, J.; Xu, Y. Triboelectric nanogenerators for a macro-scale blue energy harvesting and self-powered marine environmental monitoring system. Sustain. Energy Fuels 2020, 4, 1063–1077. [Google Scholar] [CrossRef]
- Jiang, T.; Pang, H.; An, J.; Lu, P.; Feng, Y.; Liang, X.; Zhong, W.; Wang, Z.L. Robust swing-structured triboelectric nanogenerator for efficient blue energy harvesting. Adv. Energy Mater. 2020, 10, 2000064. [Google Scholar] [CrossRef]
- Liu, G.; Guo, H.; Xu, S.; Hu, C.; Wang, Z.L. Oblate spheroidal triboelectric nanogenerator for all-weather blue energy harvesting. Adv. Energy Mater. 2019, 9, 1900801. [Google Scholar] [CrossRef]
- Jie, Y.; Jia, X.; Zou, J.; Chen, Y.; Wang, N.; Wang, Z.L.; Cao, X. Natural leaf made triboelectric nanogenerator for harvesting environmental mechanical energy. Adv. Energy Mater. 2018, 8, 1703133. [Google Scholar] [CrossRef]
- Wu, Y.; Qu, J.; Chu, P.K.; Shin, D.M.; Luo, Y.; Feng, S.P. Hybrid photovoltaic-triboelectric nanogenerators for simultaneously harvesting solar and mechanical energies. Nano Energy 2021, 89, 106376. [Google Scholar] [CrossRef]
- Song, Y.; Wang, N.; Hu, C.; Wang, Z.L.; Yang, Y. Soft triboelectric nanogenerators for mechanical energy scavenging and self-powered sensors. Nano Energy 2021, 84, 105919. [Google Scholar] [CrossRef]
- Bai, Z.; Xu, Y.; Li, J.; Zhu, J.; Gao, C.; Zhang, Y.; Wang, J.; Guo, J. An eco-friendly porous nanocomposite fabric-based triboelectric nanogenerator for efficient energy harvesting and motion sensing. ACS Appl. Mater. Interfaces 2020, 12, 42880–42890. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.; Ding, W.; Dai, Y.; Dong, K.; Wu, C.; Zhang, L.; Lin, Z.; Cheng, J.; Wang, Z.L. Self-powered multifunctional motion sensor enabled by magnetic-regulated triboelectric nanogenerator. ACS Nano 2018, 12, 5726–5733. [Google Scholar] [CrossRef]
- Rana, S.M.S.; Rahman, M.T.; Salauddin, M.; Maharjan, P.; Bhatta, T.; Cho, H.; Park, J.Y. A human-machine interactive hybridized biomechanical nanogenerator as a self-sustainable power source for multifunctional smart electronics applications. Nano Energy 2020, 76, 105025. [Google Scholar] [CrossRef]
- Zou, H.X.; Zhao, L.C.; Wang, Q.; Gao, Q.H.; Yan, G.; Wei, K.X.; Zhang, W.M. A self-regulation strategy for triboelectric nanogenerator and self-powered wind-speed sensor. Nano Energy 2022, 95, 106990. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, E.; Chen, T.; Wang, J.; Hu, Z.; Mi, J.; Pan, X.; Xu, M. A novel humidity resisting and wind direction adapting flag-type triboelectric nanogenerator for wind energy harvesting and speed sensing. Nano Energy 2020, 78, 105279. [Google Scholar] [CrossRef]
- He, F.; You, X.; Gong, H.; Yang, Y.; Bai, T.; Wang, W.; Guo, W.; Liu, X.; Ye, M. Stretchable, biocompatible, and multifunctional silk fibroin-based hydrogels toward wearable strain/pressure sensors and triboelectric nanogenerators. ACS Appl. Mater. Interfaces 2020, 12, 6442–6450. [Google Scholar] [CrossRef] [PubMed]
- Long, S.; Feng, Y.; He, F.; Zhao, J.; Bai, T.; Lin, H.; Cai, W.; Mao, C.; Chen, Y.; Gan, L.; et al. Biomass-derived, multifunctional and wave-layered carbon aerogels toward wearable pressure sensors, supercapacitors and triboelectric nanogenerators. Nano Energy 2021, 85, 105973. [Google Scholar] [CrossRef]
- He, W.; Sohn, M.; Ma, R.; Kang, D.J. Flexible single-electrode triboelectric nanogenerators with MXene/PDMS composite film for biomechanical motion sensors. Nano Energy 2020, 78, 105383. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, P.; Zhang, W. A high-output performance mortise and tenon structure triboelectric nanogenerator for human motion sensing. Nano Energy 2021, 84, 105933. [Google Scholar] [CrossRef]
- Chen, G.; Au, C.; Chen, J. Textile triboelectric nanogenerators for wearable pulse wave monitoring. Trends Biotechnol. 2021, 39, 1078–1092. [Google Scholar] [CrossRef] [PubMed]
- Xiao, X.; Chen, G.; Libanori, A.; Chen, J. Wearable triboelectric nanogenerators for therapeutics. Trends Chem. 2021, 3, 279–290. [Google Scholar] [CrossRef]
- Dong, K.; Peng, X.; Wang, Z.L. Fiber/fabric-based piezoelectric and triboelectric nanogenerators for flexible/stretchable and wearable electronics and artificial intelligence. Adv. Mater. 2020, 32, 1902549. [Google Scholar] [CrossRef]
- Chuan, W.; He, H.; Shuo, Y.; Chenxing, F. Research on the self-powered downhole vibration sensor based on triboelectric nanogenerator. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 6427–6434. [Google Scholar] [CrossRef]
- Bai, Y.; Xu, L.; Lin, S.; Luo, J.; Qin, H.; Han, K.; Wang, Z.L. Charge pumping strategy for rotation and sliding type triboelectric nanogenerators. Adv. Energy Mater. 2020, 10, 2000605. [Google Scholar] [CrossRef]
- Lee, J.W.; Jeong, J.; Yoo, D.; Lee, K.; Lee, S.; Kim, D.S.; Sim, J.Y.; Hwang, W. Pump drill-integrated triboelectric nanogenerator as a practical substitute for batteries of intermittently used devices. Nano Energy 2019, 56, 612–618. [Google Scholar] [CrossRef]
- Mehamud, I.; Marklund, P.; Björling, M.; Shi, Y. Machine condition monitoring enabled by broad range vibration frequency detecting triboelectric nano-generator (TENG)-based vibration sensors. Nano Energy 2022, 98, 107292. [Google Scholar] [CrossRef]
- Shi, G.; Zeng, W.; Xia, Y.; Xu, J.; Jia, S.; Li, Q.; Wang, X.; Xia, H.; Ye, Y. A floating piezoelectric electromagnetic hybrid wave vibration energy harvester actuated by a rotating wobble ball. Energy 2023, 270, 126808. [Google Scholar] [CrossRef]
- Niu, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef]
- Hu, D.; Yao, M.; Fan, Y.; Ma, C.; Fan, M.; Liu, M. Strategies to achieve high performance piezoelectric nanogenerators. Nano Energy 2019, 55, 288–304. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Pan, G.; Wu, C.; Feng, Y. Research on Hybrid Vibration Sensor for Measuring Downhole Drilling Tool Vibrational Frequencies. Appl. Sci. 2024, 14, 5014. https://doi.org/10.3390/app14125014
Liu J, Pan G, Wu C, Feng Y. Research on Hybrid Vibration Sensor for Measuring Downhole Drilling Tool Vibrational Frequencies. Applied Sciences. 2024; 14(12):5014. https://doi.org/10.3390/app14125014
Chicago/Turabian StyleLiu, Jiangbin, Guangzhi Pan, Chuan Wu, and Yanjun Feng. 2024. "Research on Hybrid Vibration Sensor for Measuring Downhole Drilling Tool Vibrational Frequencies" Applied Sciences 14, no. 12: 5014. https://doi.org/10.3390/app14125014