Prototype Network for Few-Shot Hazard Assessment of Vehicle Lane Changes in Risk Field

Abstract
1. Introduction
- Utilizing features extracted from both the self-vehicle content and the surrounding vehicle-related content, we aimed to refine the representation and discriminability of risk discrimination features by sharing the vehicle risk threshold space with the vehicle risk field. This enhancement was achieved through univariate or multivariate combinations, enhancing the clarity of the risk assessment index.
- We propose a risk classification mechanism that integrates the vehicle risk field and prototype network. This mechanism aims to match attributes from various risk fields to identify more crucial attribute features as input data for the prototype network. Extensive experiments conducted with few-shot data demonstrate that our proposed algorithm effectively enhances the accuracy of vehicle risk identification.
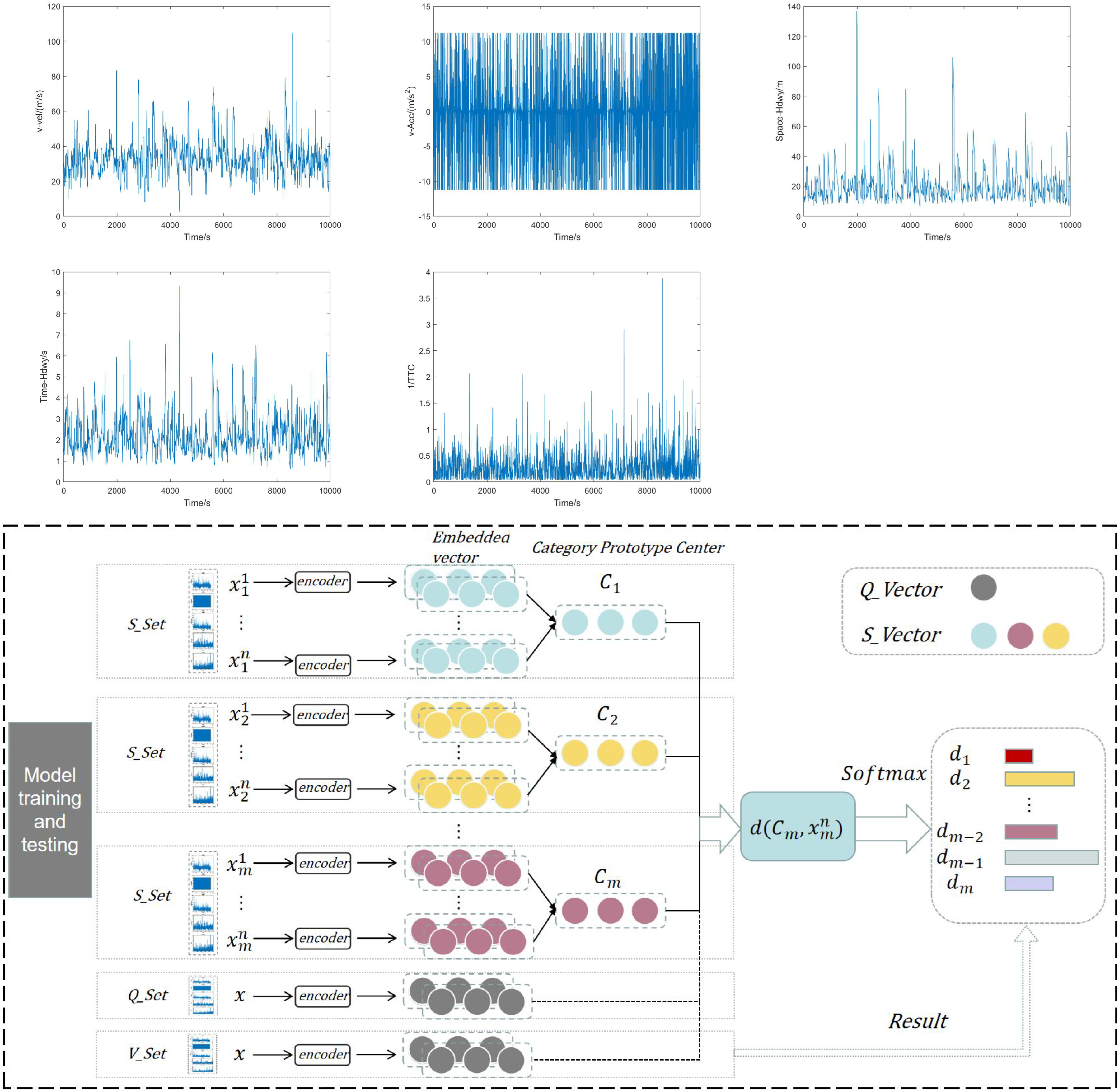
- We employed a prototype network to predict vehicle risks and introduce a novel vehicle risk assessment method with few-shot capabilities.
2. Analysis of Lane-Change Behavior and Data Extraction
2.1. Analysis of Lane-Change Behavior
2.1.1. The Start Point of the Lane Change
2.1.2. The Variables that Affect Lane-Changing Behavior
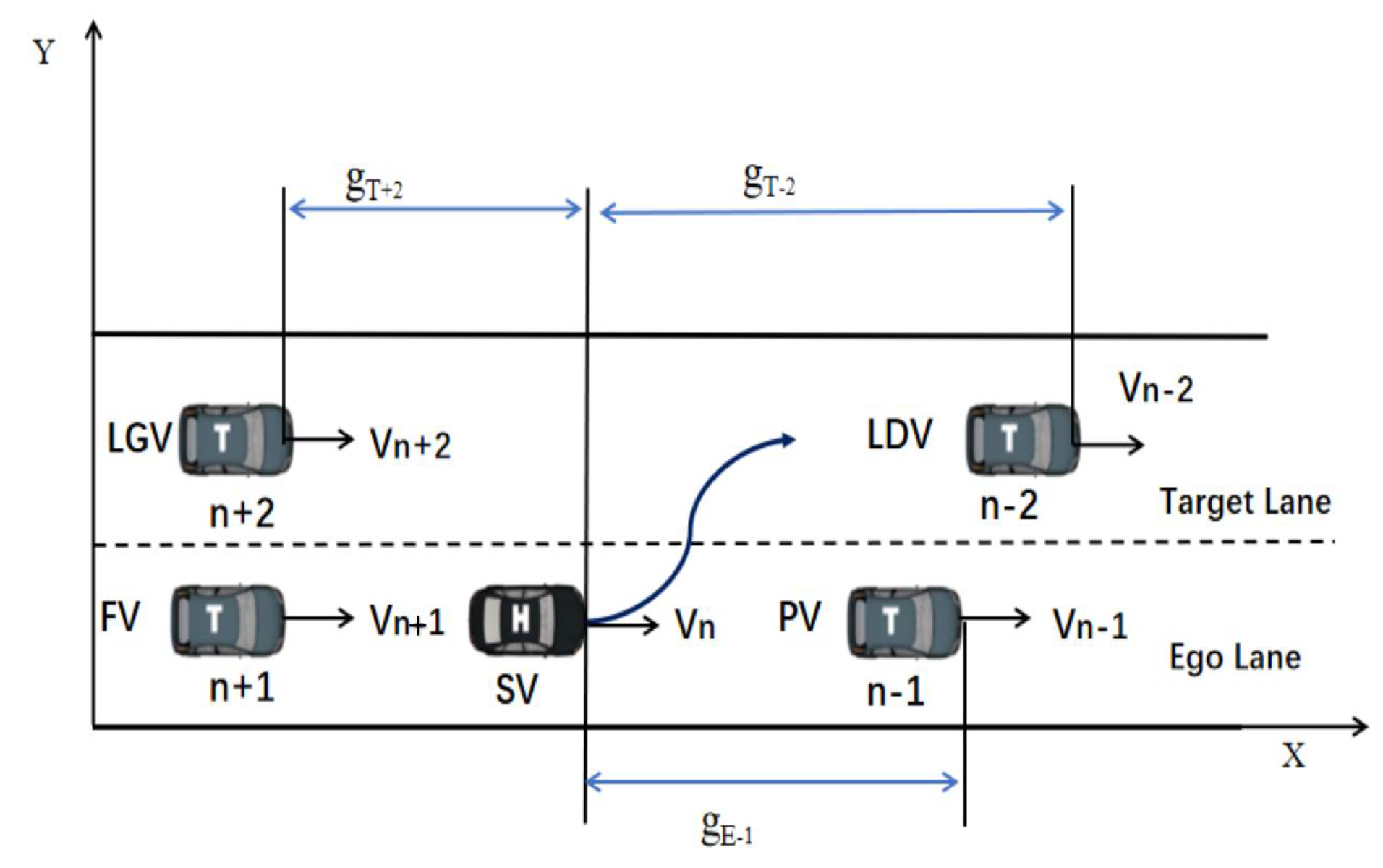
- The subject vehicle, SV, is faster than vehicle PV in front of the current lane. There is enough space in front of the target lane for a lane change (), meeting the lane change requirement. The distance between the main vehicle, LGV, and the vehicle behind the target lane () is greater than the minimum safe following distance.
- Vehicle LDV in front of the target lane is faster than vehicle SV in the current lane. The distance () between vehicle LGV and the vehicle behind the target lane is greater than the minimum safe following distance.
- The FV behind the current lane is mostly to blame for safety problems between the SV and the FV behind it, such as tailgating. Studies on lane-shifting behavior do not consider the relationship between speed and distance from vehicle FV.
2.2. Extracting Data on Lane Changes
2.3. Influencing Factors and Quantification of Indicators
3. Risk Level Assessment of Vehicle Lane Change Based on Field Strength Theory
3.1. Collision Risk Factor Assignment Based on the Entropy Method
3.2. Risk Field Theory-Based Assessment of the Risk Associated with a Lane Change
4. A Prototype Network-Based Risk Level Identification Model for Lane Change
4.1. Theory
4.2. Experimental and Results
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Polychronopoulos, A.; Amditis, A.; Scheunert, U.; Scheunert, U.; Tatschke, T. Revisiting JDL model for automotive safety applications: The PF2 functional model. In Proceedings of the 2006 9th International Conference on Information Fusion, Florence, Italy, 10–13 July 2006; pp. 1–7. [Google Scholar]
- Rendon-Velez, E.; Horváth, I.; Opiyo, E.Z. Progress with situation assessment and risk prediction in advanced driver assistance systems: A survey. In Proceedings of the 16th ITS World Congress, Stockholm, Sweeden, 21–25 September 2009; pp. 21–25. [Google Scholar]
- Huang, J.; Tan, H.S. Error analysis and performance evaluation of a future-trajectory-based cooperative collision warning system. IEEE Trans. Intell. Transp. Syst. 2008, 10, 175–180. [Google Scholar] [CrossRef]
- Katrakazas, C.; Quddus, M.; Chen, W.H. A New Methodology for Collision Risk Assessment of Autonomous Vehicles. Ph.D. Thesis, Longhborough University, Longhborough, UK, 2017. [Google Scholar]
- Kim, J.; Kum, D. Collision risk assessment algorithm via lane-based probabilistic motion prediction of surrounding vehicles. IEEE Trans. Intell. Transp. Syst. 2007, 19, 2965–2976. [Google Scholar] [CrossRef]
- Yu, M.Y.; Vasudevan, R.; Johnson-Roberson, M. Occlusion-aware risk assessment for autonomous driving in urban environments. IEEE Robot. Autom. Lett. 2019, 4, 2235–2241. [Google Scholar] [CrossRef]
- Katrakazas, C.; Quddus, M.; Chen, W.H. A new integrated collision risk assessment methodology for autonomous vehicles. Accid. Anal. Prev. 2019, 127, 61–79. [Google Scholar] [CrossRef]
- Chen, T.; Shi, X.; Wong, Y.D. Key feature selection and risk prediction for lane-changing behaviors based on vehicles’ trajectory data. Accid. Anal. Prev. 2019, 129, 156–169. [Google Scholar] [CrossRef] [PubMed]
- Shi, X.; Wong, Y.D.; Li, Z.F. A functional style learning approach based on XGBoost for driving assessment and risk prediction. Accid. Anal. Prev. 2019, 129, 170–179. [Google Scholar] [CrossRef]
- Shi, X. Accident Risk Assessment and Prediction Using Surrogate Indicators and Machine Learning; Nanyang Technological University: Singapore, 2019; pp. 1–200. [Google Scholar]
- Gidaris, S.; Komodakis, N. Dynamic few-shot visual learning without forgetting. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4367–4375. [Google Scholar]
- Ren, M.; Liao, R.; Fetaya, E.; Zemel, R. Incremental few-shot learning with attention attractor networks. Adv. Neural Inf. Process. Syst. 2019, 32, 5275–5285. [Google Scholar]
- Kang, B.; Liu, Z.; Wang, X.; Yu, F.; Feng, J.; Darrell, T. Few-shot object detection via feature reweighting. In Proceedings of the IEEE International Conference on Computer Visions, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8419–8428. [Google Scholar]
- Perez-Rua, J.M.; Zhu, X.; Hospedales, T.M.; Xiang, T. Incremental few-shot object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 14–19 June 2020; pp. 13846–13855. [Google Scholar]
- Guo, J.; Zhu, X.; Zhao, C.; Cao, D.; Lei, Z.; Li, S.Z. Learning meta face recognition in unseen domains. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 14–19 June 2020; pp. 6163–6172. [Google Scholar]
- Nguyen, B.D.; Do, T.T.; Nguyen, B.X.; Do, T.; Tjiputra, E.; Tran, Q.D. Overcoming data limitation in medical visual question answering. In Medical Image Computing and Computer Assisted Intervention—MICCAI 2019: Proceedings of the 22nd International Conference, Shenzhen, China, 13–17 October 2019; Proceedings, Part IV 22; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 522–530. [Google Scholar]
- Wang, T.C.; Liu, M.Y.; Tao, A.; Liu, G.; Kautz, J.; Catanzaro, B. Few-shot video-to-video synthesis. In Proceedings of the Annual Conference on Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019; pp. 5014–5025. [Google Scholar]
- Li, Q.; Zhang, W.; Jin, Q.; Yao, X. Multi-Function Radar Working Mode Recognition with Few Samples Based on Knowledge Embedded Prototype Network. Acta Electron. Sin. 2022, 50, 1344–1350. [Google Scholar]
- Wang, D.; Zhang, M.; Xu, Y. Metric-based meta-learning model for few-shot fault diagnosis under multiple limited data conditions. Mech. Syst. Signal Process. 2021, 155, 107510. [Google Scholar] [CrossRef]
- Hou, H.; Jin, L.; Niu, Q.; Sun, Y.; Lu, M. Driver Intention Recognition Method Using Continuous Hidden Markov Model. Int. J. Comput. Intell. Syst. 2011, 4, 386–393. [Google Scholar]
- Ji, X.; Fei, C.; He, X.; Liu, Y.; Liu, Y. Intention recognition and trajectory prediction for vehicles using LSTM network. China J. Highw. Transp. 2019, 32, 34–42. [Google Scholar]
- Guo, Y.; Zhang, H.; Wang, C.; Sun, Q.; Li, W. Driver Lane Change Intention Recognition Based on Visual Characteristics. J. China Highw. Eng. 2013, 26, 7. [Google Scholar]
- Jalal, A.; Kim, S. Global security using human face understanding under vision ubiquitous architecture system. World Acad. Sci. Eng. Technol 2006, 13, 7. [Google Scholar]
- Farooq, A.; Jalal, A.; Kamal, S. Dense RGB-D map-based human tracking and activity recognition using skin joints features and self-organizing map. KSII Trans. Internet Inf. Syst. 2015, 9, 1856–1869. [Google Scholar]
- Yang, D.; Zhu, L.; Yang, F.; Pu, Y. Modeling and analysis of lateral driver behavior in lane-changing execution. Transp. Res. Rec. 2015, 2490, 127–137. [Google Scholar] [CrossRef]
- Choudhury, C.F.; Ramanujam, V.; Ben-Akiva, M.E. Modeling acceleration decisions for freeway merges. Transp. Res. Rec. 2009, 2124, 45–57. [Google Scholar] [CrossRef]
- Han, Z. A Microscopic Lane-Changing Model for Driver-Vehicle Agent. Master’s Thesis, University of Science and Technology of China, Hefei, China, 2011. [Google Scholar]
- Liu, Y.; Wang, X.; Li, L.; Cheng, S.; Chen, Z. A novel lane change decision-making model of autonomous vehicle based on support vector machine. IEEE Access 2019, 7, 26543–26550. [Google Scholar] [CrossRef]
- Zhang, Y.; Shao, C.; Li, H.; Ma, X. Microscopic Characteristics Analysis of Lane Changing Behavior Based on NGSIM Trajectory Data. J. Traffic Inf. Saf. 2015, 33, 19–24+32. [Google Scholar]
- Hayward, J.C. Near Miss Determination through Use of a Scale of Danger; The Pennsylvania State University: University Park, PA, USA, 1972. [Google Scholar]
- Olsen, E.C.B. Modeling Slow Lead Vehicle Lane Changing. Ph.D. Thesis, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA, 2003. [Google Scholar]
- Minderhoud, M.M.; Bovy, P.H.L. Extended time-to-collision measures for road traffic safety assessment. Accid. Anal. Prev. 2001, 33, 89–97. [Google Scholar] [CrossRef]
- Ma, Y.; Qi, S.; Zhang, Y.; Lian, G.; Lu, W.; Chan, C.Y. Drivers’ Visual Attention Characteristics under Different Cognitive Workloads: An On-Road Driving Behavior Study. Int. J. Environ. Res. Public Health 2020, 17, 5366. [Google Scholar] [CrossRef]
- Niu, C.; Wu, K.; Zhou, X.; Su, Z.; Hu, X. Test and evaluation of AEB system based on different overlap-rate collision and different light scenario. J. Automot. Saf. Energy 2022, 13, 269. [Google Scholar]
- Zheng, X.L.; Li, M.D.; Zheng, H.R.; Chen, D.F. Optimization and Simulation of Portable Crane’s Arm System Based on MATLAB. Adv. Mater. Res. 2012, 479, 1955–1958. [Google Scholar] [CrossRef]
- Maurya, A.K.; Dey, S.; Das, S. Speed and time headway distribution under mixed traffic condition. J. East. Asia Soc. Transp. Stud. 2015, 11, 1774–1792. [Google Scholar]
- Neale, V.; Klauer, S.G.; Guo, F.; Ramsey, D.J. Naturalistic Driving Study: Phase 2; Final Report of ITS Center Project; Virginia Tech Transportation Institute (VTTI): Blacksburg, VA, USA, 2008. [Google Scholar]
- Khatib, O. Real-time obstacle avoidance system for manipulators and mobile robots. In Proceedings of the 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, 25–28 March 1985; pp. 25–28. [Google Scholar]
- Orozco-Rosas, U.; Montiel, O.; Sepúlveda, R. Mobile robot path planning using membrane evolutionary artificial potential field. Appl. Soft Comput. 2019, 77, 236–251. [Google Scholar] [CrossRef]
- Kumar, P.B.; Rawat, H.; Parhi, D.R. Path planning of humanoids based on artificial potential field method in unknown environments. Expert Syst. 2019, 36, e12360. [Google Scholar] [CrossRef]
- Azzabi, A.; Nouri, K. An advanced potential field method proposed for mobile robot path planning. Trans. Inst. Meas. Control. 2019, 41, 3132–3144. [Google Scholar] [CrossRef]
- Wang, J.; Wu, J.; Li, Y. The driving safety field based on driver–vehicle–road interactions. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2203–2214. [Google Scholar] [CrossRef]
- Wang, J. Driving safety field theory modeling and its application in pre-collision warning system. Transp. Res. Part C Emerg. Technol. 2016, 72, 306324. [Google Scholar] [CrossRef]
- Snell, J.; Swersky, K.; Zemel, R. Prototypical networks for few-shot learning. Adv. Neural Inf. Process. Syst. 2017, 30, 4077–4087. [Google Scholar]
- Vinyals, O.; Blundell, C.; Lillicrap, T.; Kavukcuoglu, K.; Wierstra, D. Matching networks for one shot learning. Adv. Neural Inf. Process. Syst. 2016, 36, 3630–3638. [Google Scholar]
- Sung, F.; Yang, Y.; Zhang, L.; Xiang, T.; Torr, P.H.S.; Hospedales, T.M. Learning to comapare: Relation network for few-shot learning. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 1199–1208. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variable | Meaning | Correlation Coefficient | p Value |
|---|---|---|---|
| v_vel | Vehicle speed | 0.235171 | 8.8057353 × 10−29 |
| v_Acc | Vehicle acceleration | 0.0 | |
| Space_Hdwy | Headway spacing | 8.928308 × 10−136 | |
| Time_Hdwy | Headway time distance | 1.5712488 × 10−61 | |
| Relative position to the center of the intersection on the yaxis | |||
| Relative speed | |||
| Relative acceleration | 0.0 | ||
| TTC | Time to collision | ||
| 1/TTC | Inverse of time to collision | 0.0 |
| Lane Change Hazard {d} | Quantification | |||||||
|---|---|---|---|---|---|---|---|---|
| Potential risk | 1 | <22.22 | >55.55 | >5 | <0.333 | 1 | 2 | |
| Medium risk | 2 | 1 | 2 | |||||
| High risk | 3 | >33.33 | <33.34 | ≤2 | ≥0.2273 | 1 | 2 |
| Loss Type | Test Accuracy | ||
|---|---|---|---|
| 6-Way 5-Shot | 6-Way 10-Shot | 6-Way 20-Shot | |
| 0.6879 | 0.8539 | 0.7876 | |
| 0.6292 | 0.5903 | 0.7268 | |
| 0.7354 | 0.9173 | 0.7031 | |
| 0.6899 | 0.7011 | 0.8398 | |
| 0.7913 | 0.9149 | 0.8488 | |
| 0.9068 | 0.7441 | 0.8520 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, D.; Zhang, C.; Lin, Y. Prototype Network for Few-Shot Hazard Assessment of Vehicle Lane Changes in Risk Field. Appl. Sci. 2024, 14, 5590. https://doi.org/10.3390/app14135590
Wang D, Zhang C, Lin Y. Prototype Network for Few-Shot Hazard Assessment of Vehicle Lane Changes in Risk Field. Applied Sciences. 2024; 14(13):5590. https://doi.org/10.3390/app14135590
Chicago/Turabian StyleWang, Dan, Ce Zhang, and Yier Lin. 2024. "Prototype Network for Few-Shot Hazard Assessment of Vehicle Lane Changes in Risk Field" Applied Sciences 14, no. 13: 5590. https://doi.org/10.3390/app14135590
APA StyleWang, D., Zhang, C., & Lin, Y. (2024). Prototype Network for Few-Shot Hazard Assessment of Vehicle Lane Changes in Risk Field. Applied Sciences, 14(13), 5590. https://doi.org/10.3390/app14135590