

Study of Urban Unmanned Aerial Vehicle Separation in Free Flight Based on Track Prediction


Abstract
1. Introduction
2. Separation Formulation Method
2.1. Track Prediction Method
2.1.1. Clustering and Classification
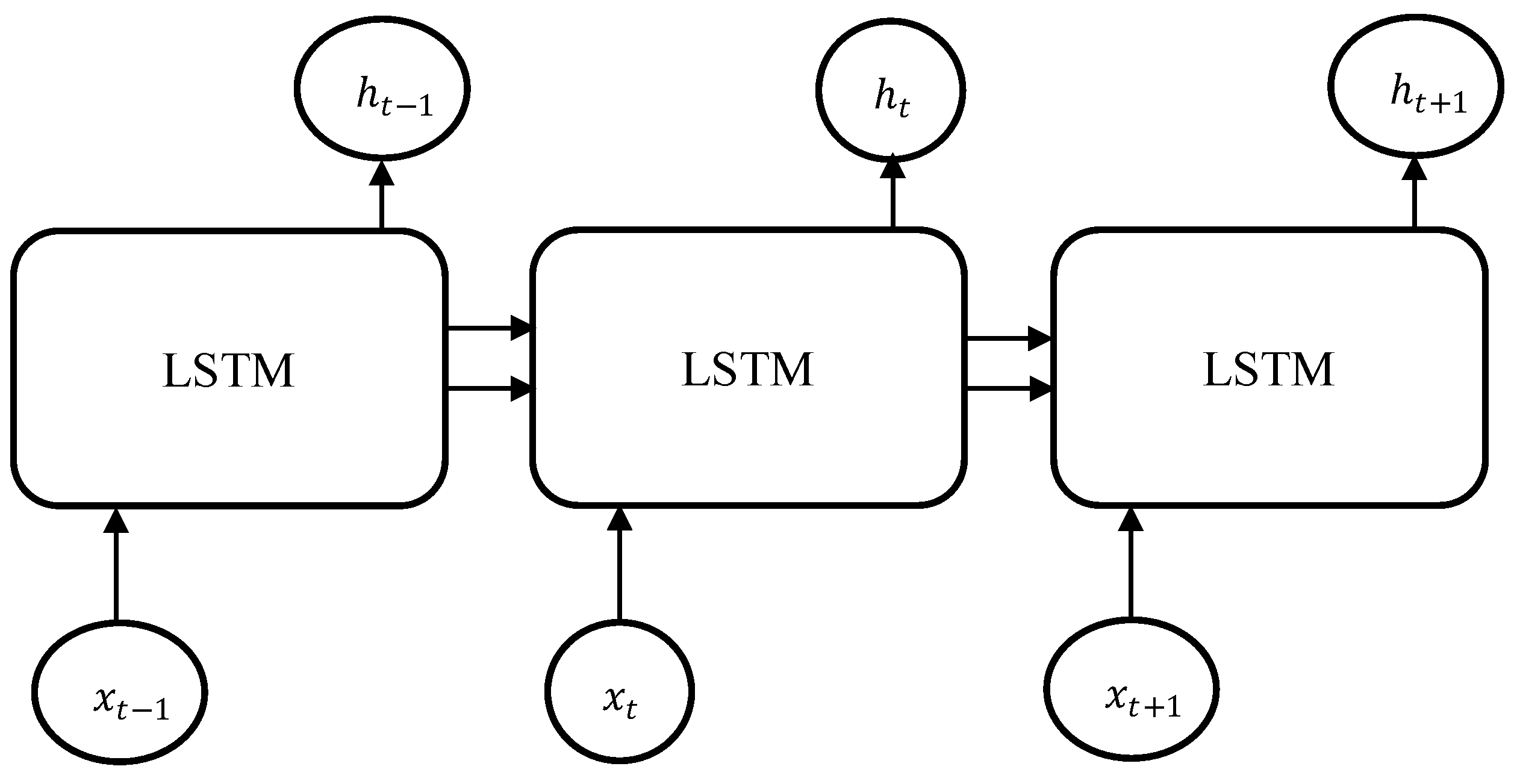
2.1.2. LSTM Prediction
2.2. Separation Formulation Based on Position Error
2.2.1. Flight Path Structure
2.2.2. Air Traffic Service Capability
2.2.3. Target Level of Safety
2.2.4. UAV Performance
3. Separation Calculation Model Based on Track Prediction
3.1. Track Prediction Model
3.1.1. K-Means Classification Model
3.1.2. Adam–LSTM Prediction Model
3.2. Separation Calculation Model
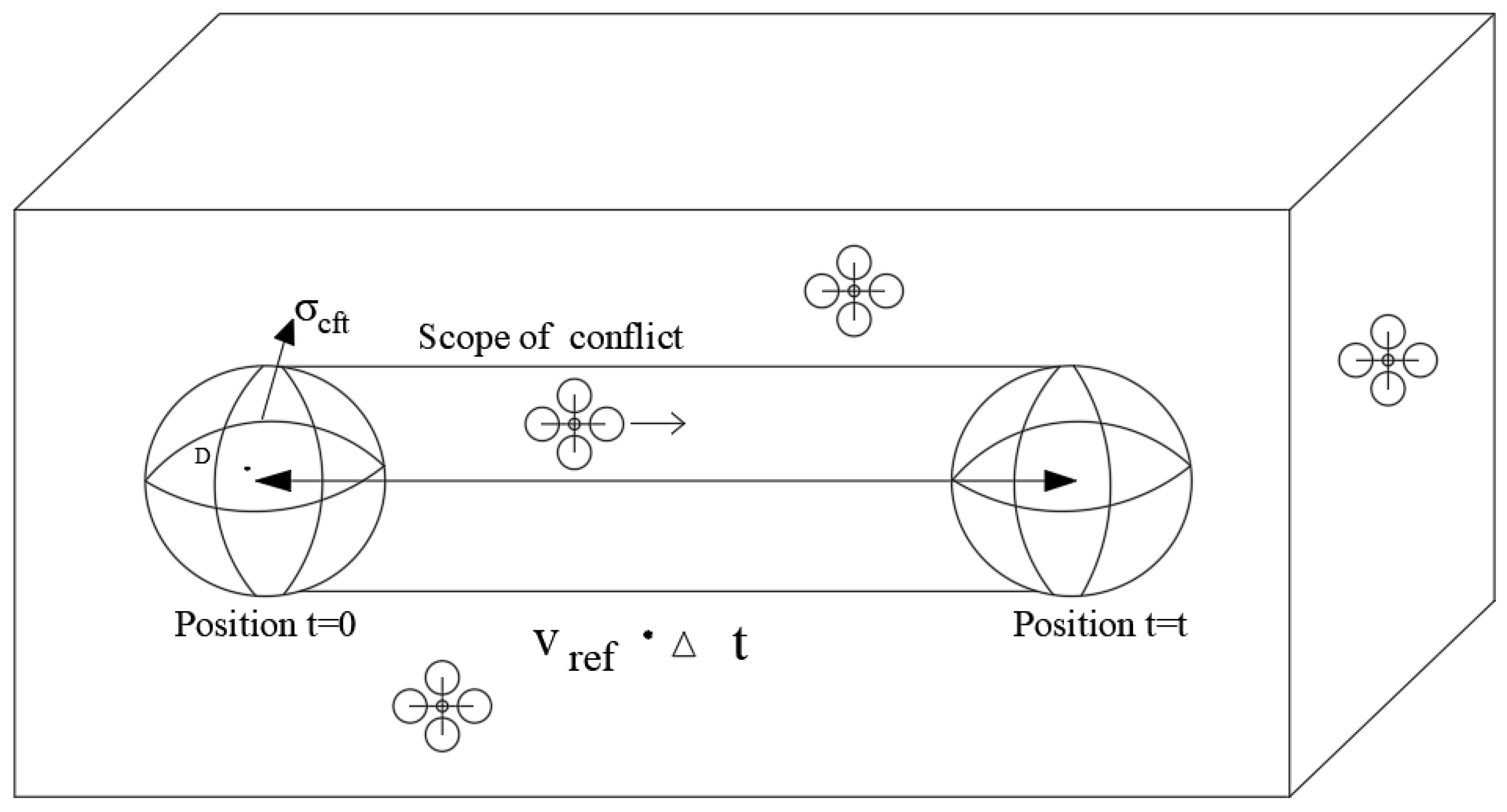
3.2.1. Conflict Frequency
3.2.2. Collision Probability in Conflict
3.2.3. Overall Collision Probability
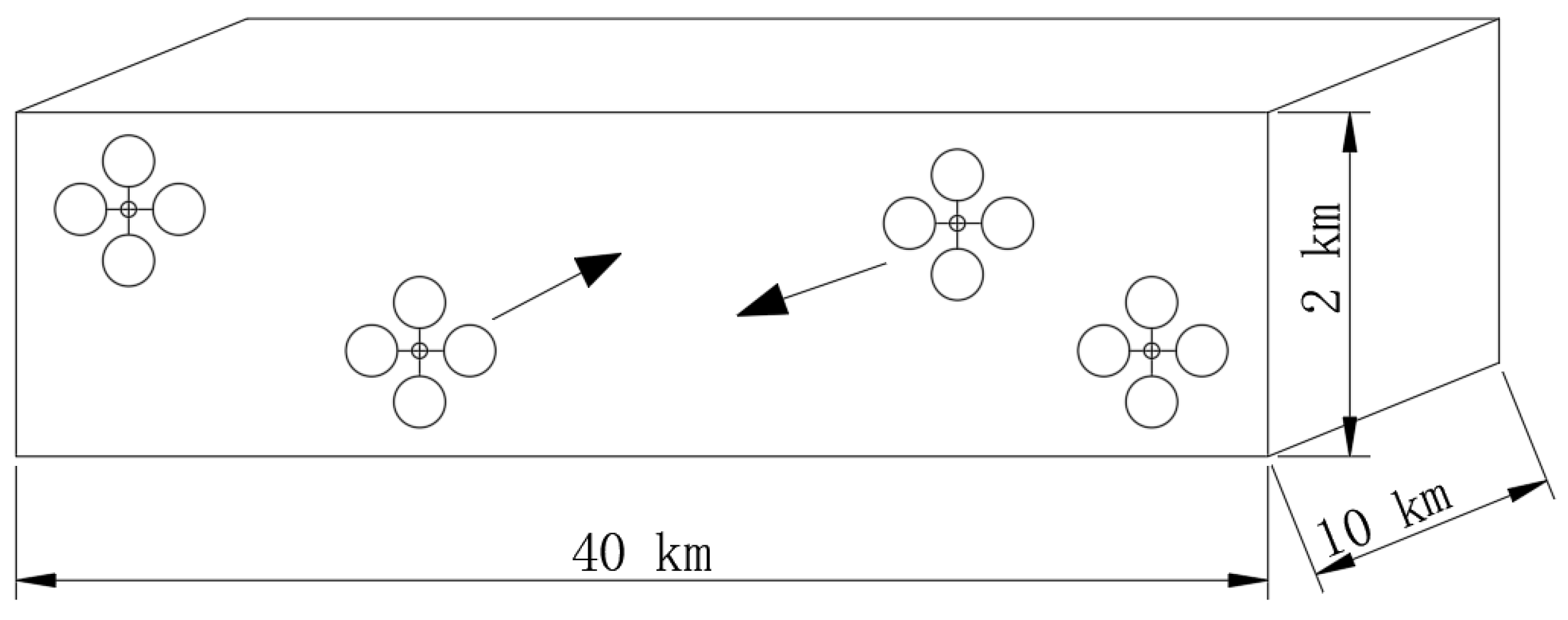
4. Case Application
4.1. Calculation of Track Prediction Error
4.1.1. Data Source
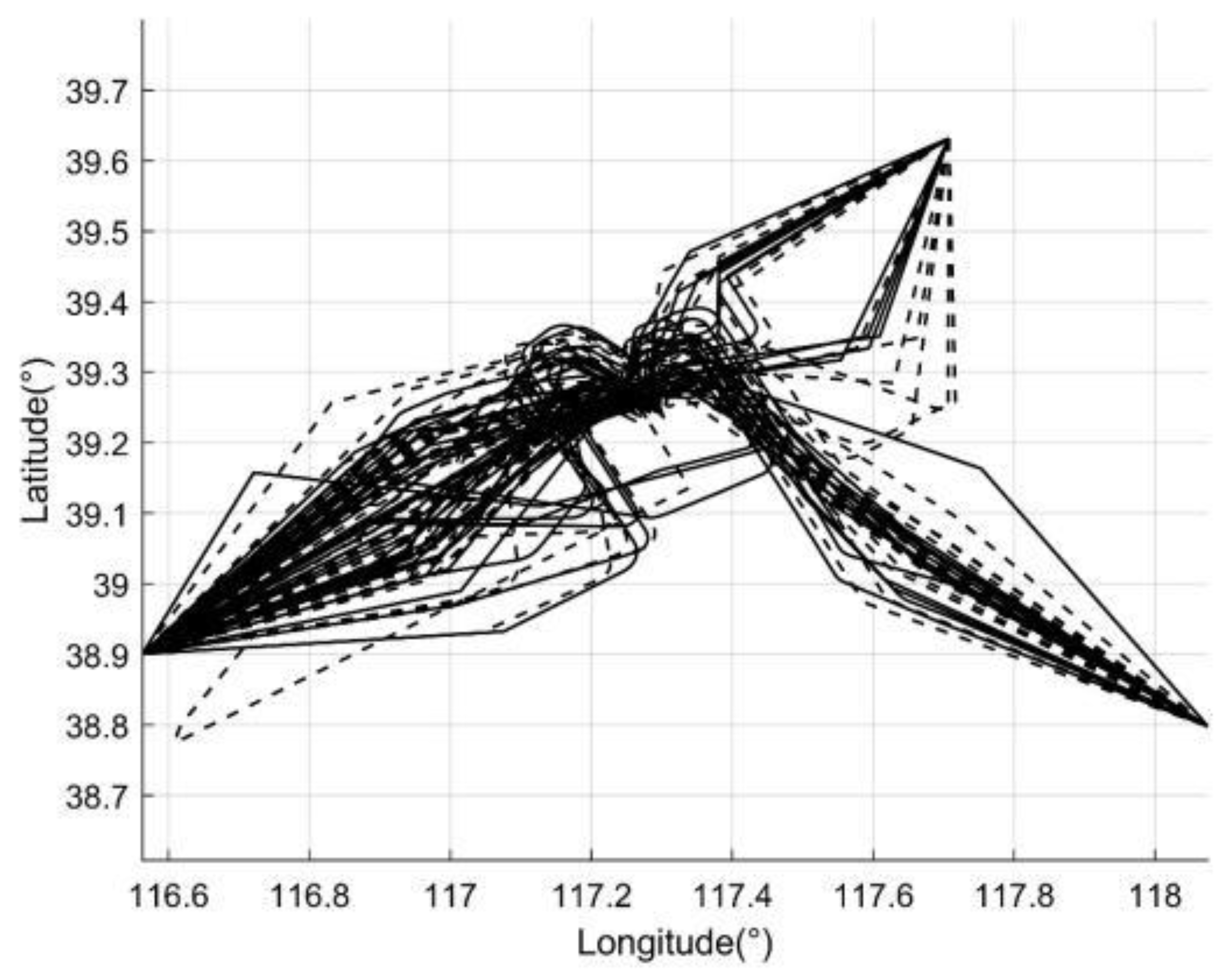
4.1.2. Clustering and Classification
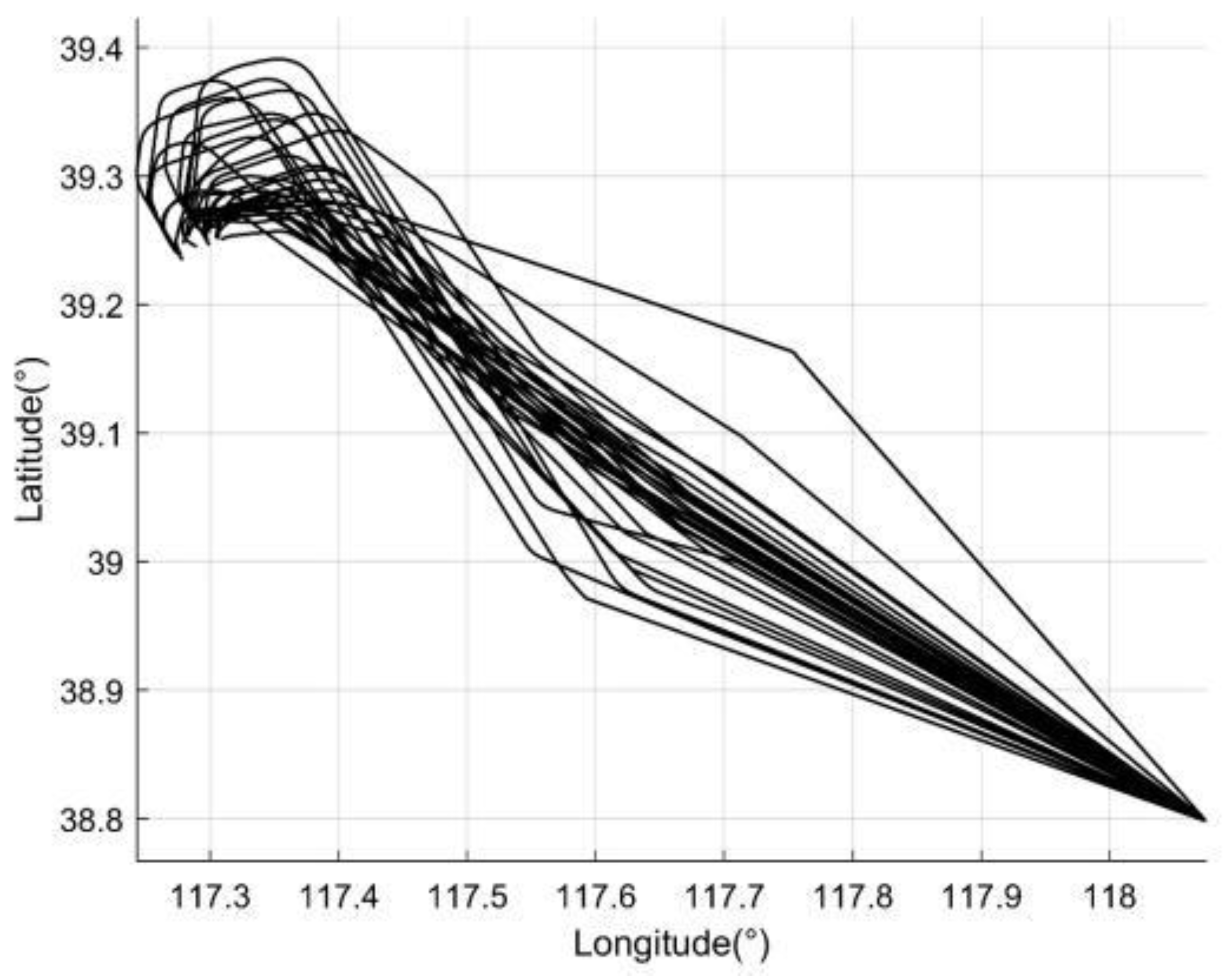
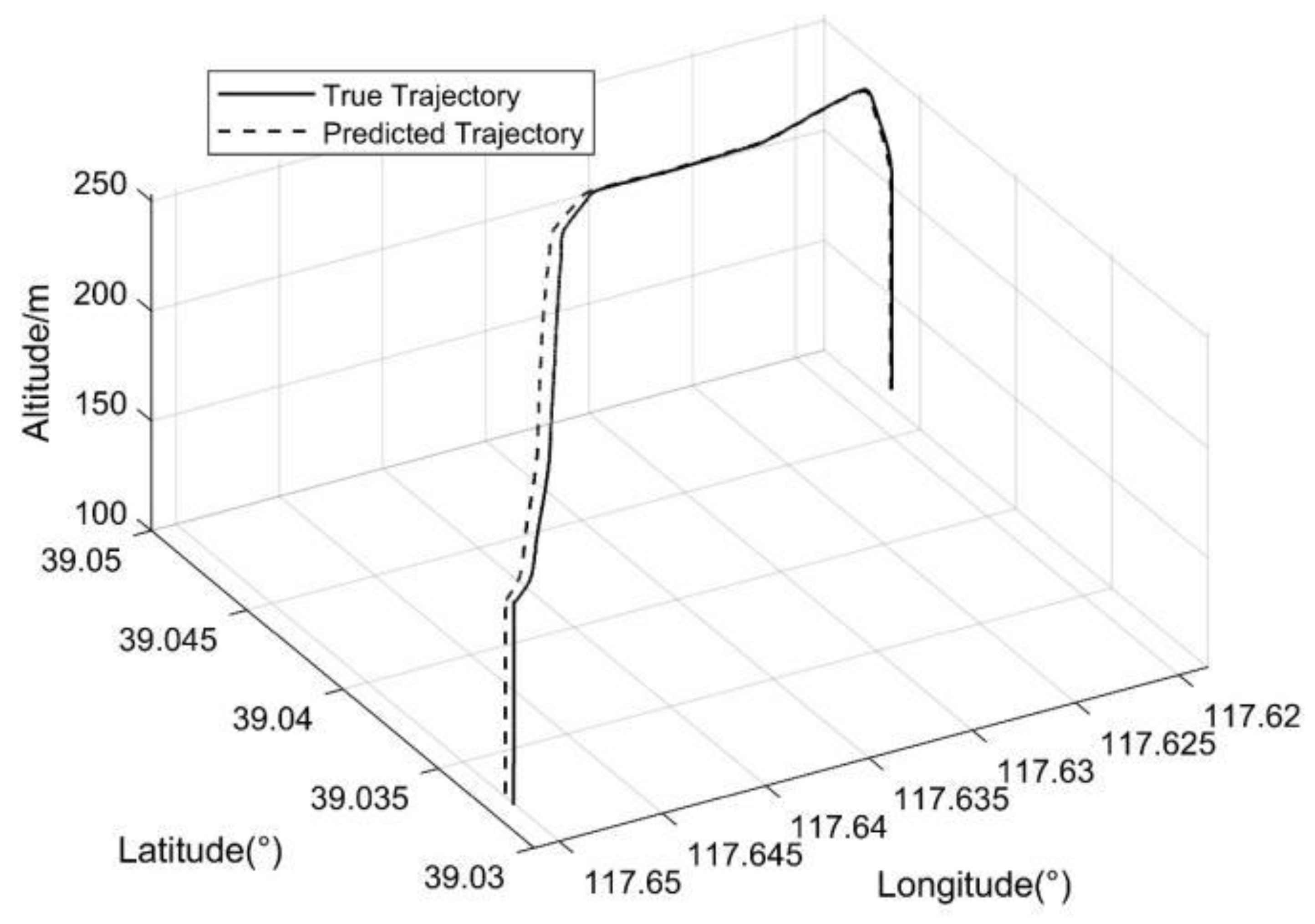
4.1.3. Track Prediction
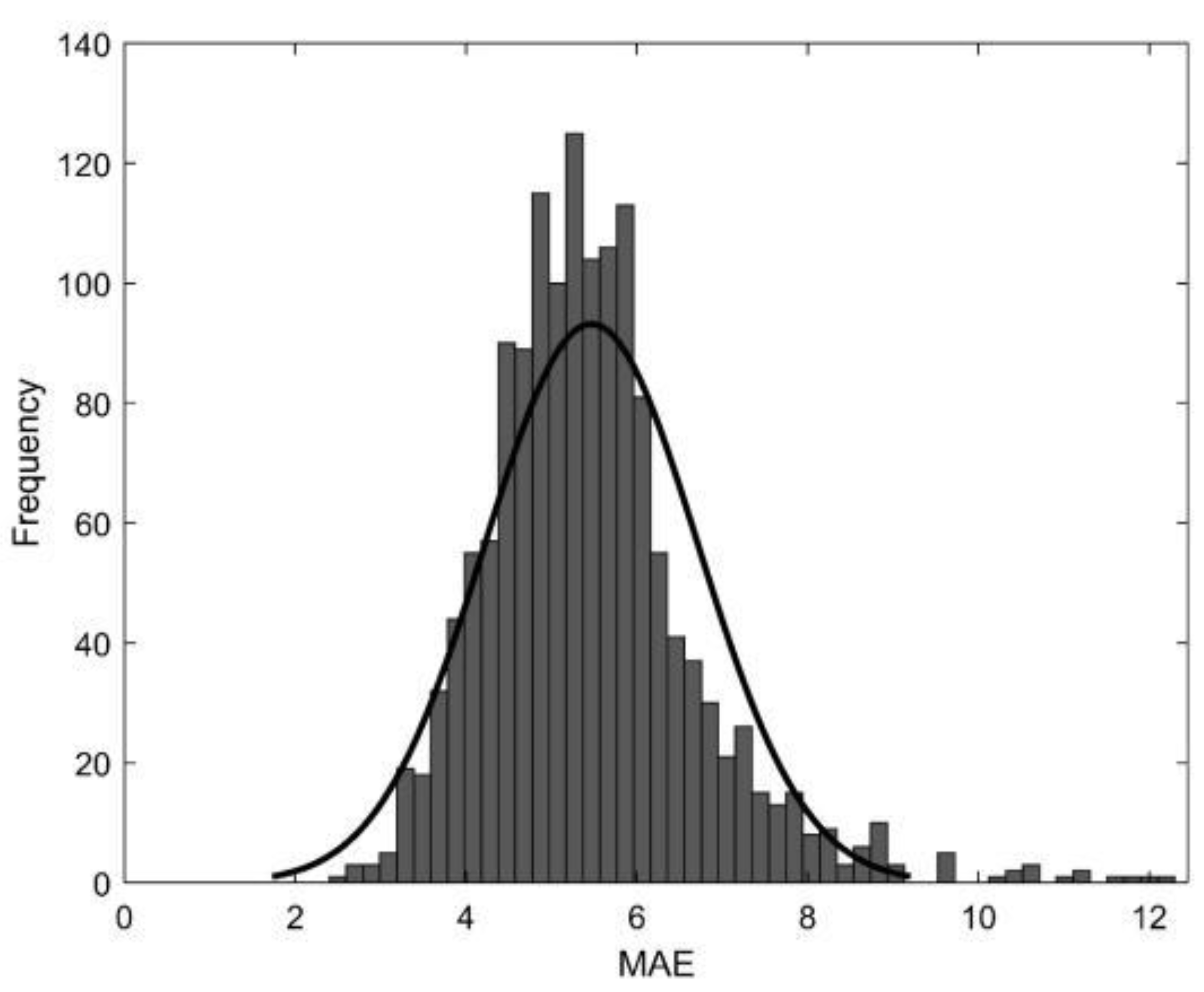
4.1.4. Prediction Error Calculation
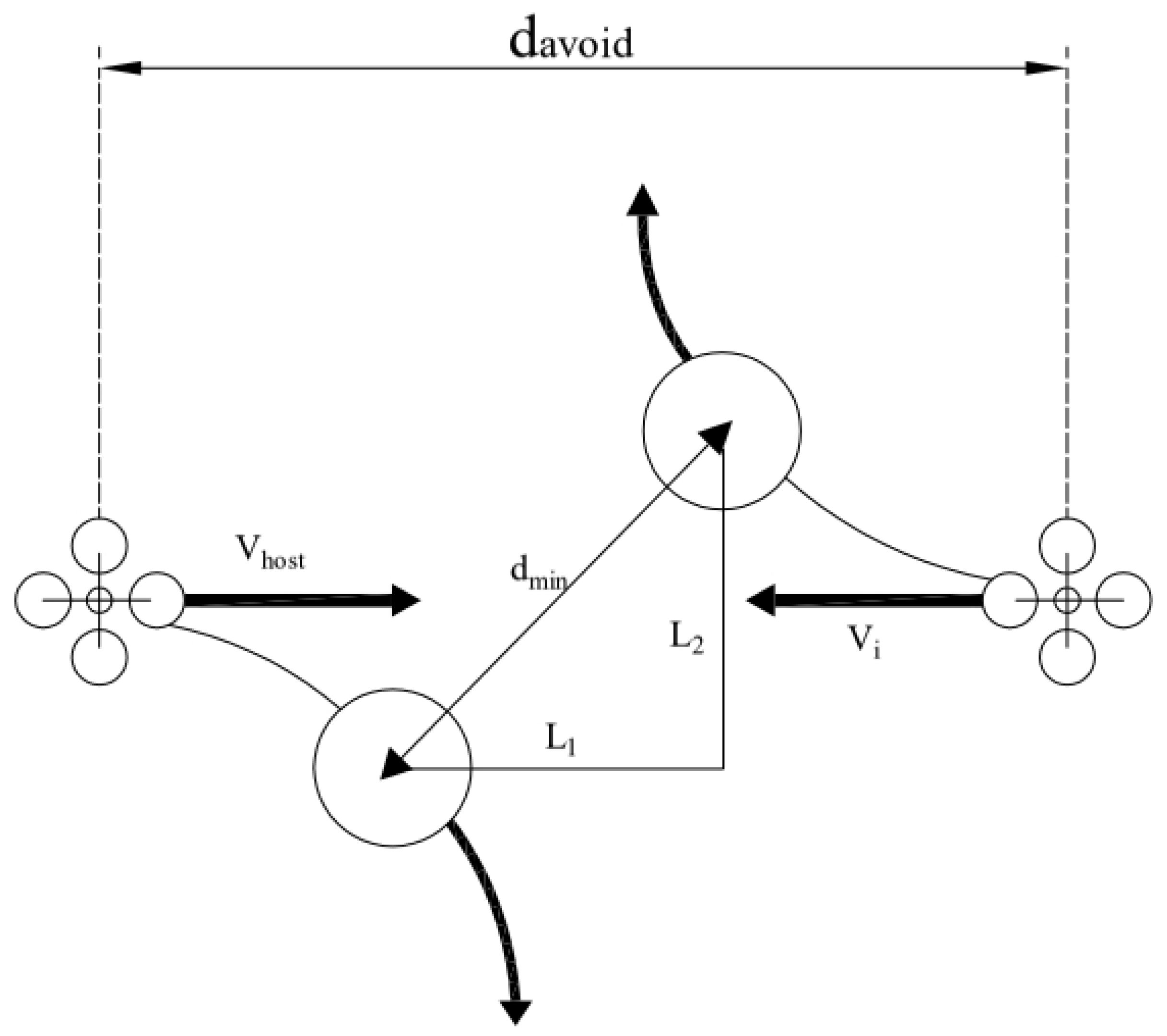
4.2. Calculation of Required Separation
4.2.1. Conflict Frequency
4.2.2. Collision Probability in Conflict
Parameters
Required Avoidance Distance
Collision Probability Calculation
Calculation of Required Separation
5. Results Analysis
5.1. Two-Stage and Traditional Prediction Comparison
5.2. Separation Calculation
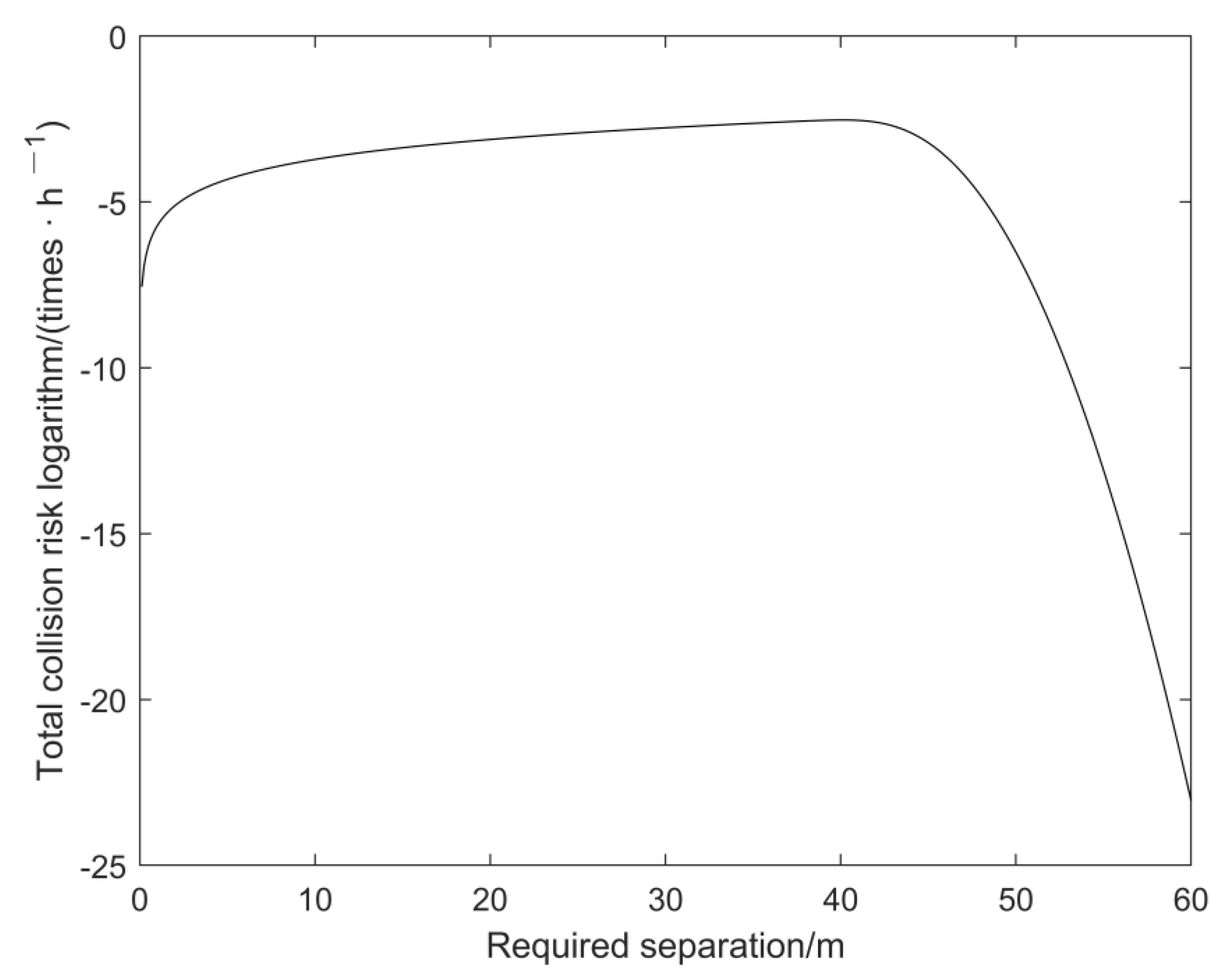
5.2.1. Overall Collision Risk Trend Analysis
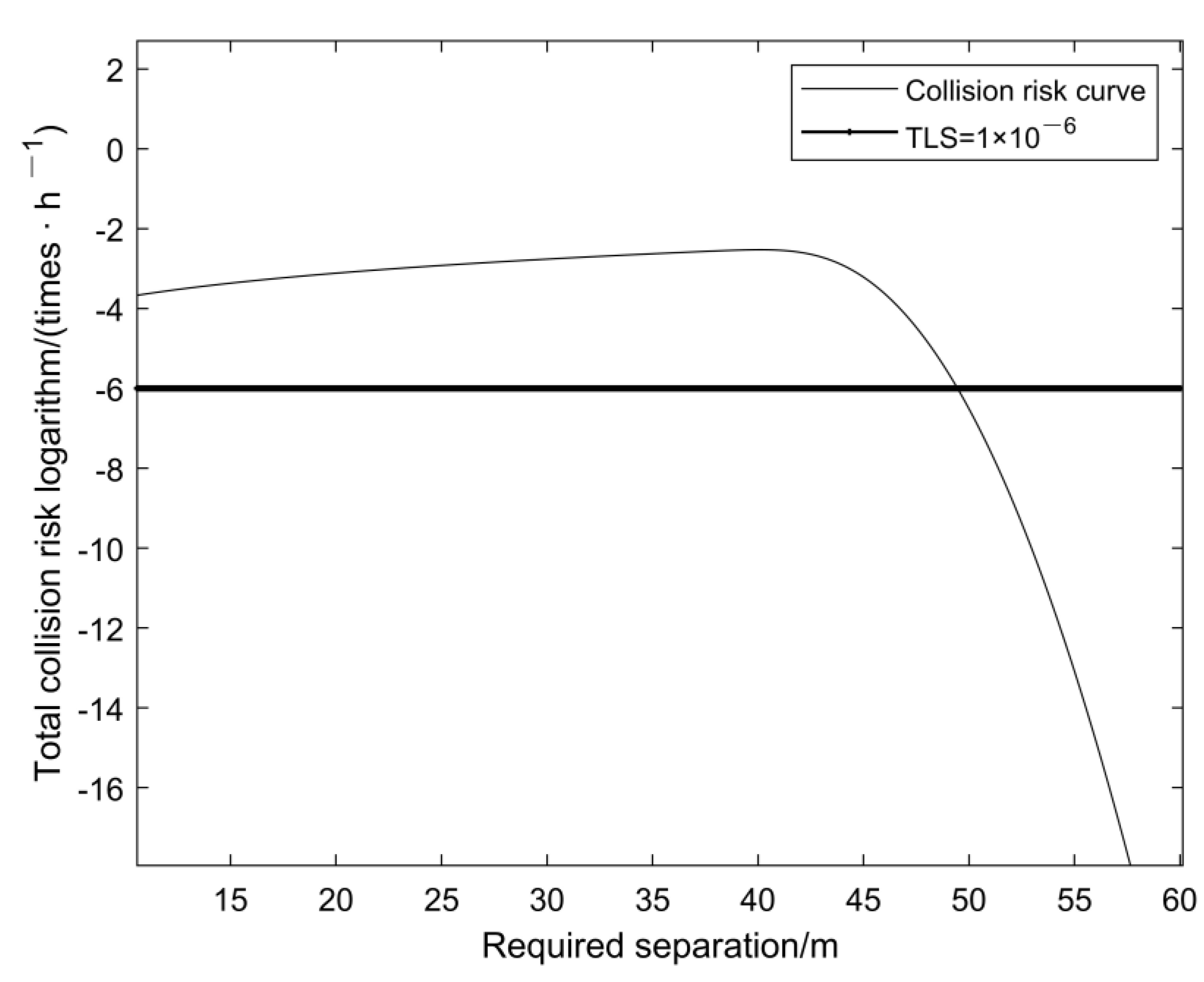
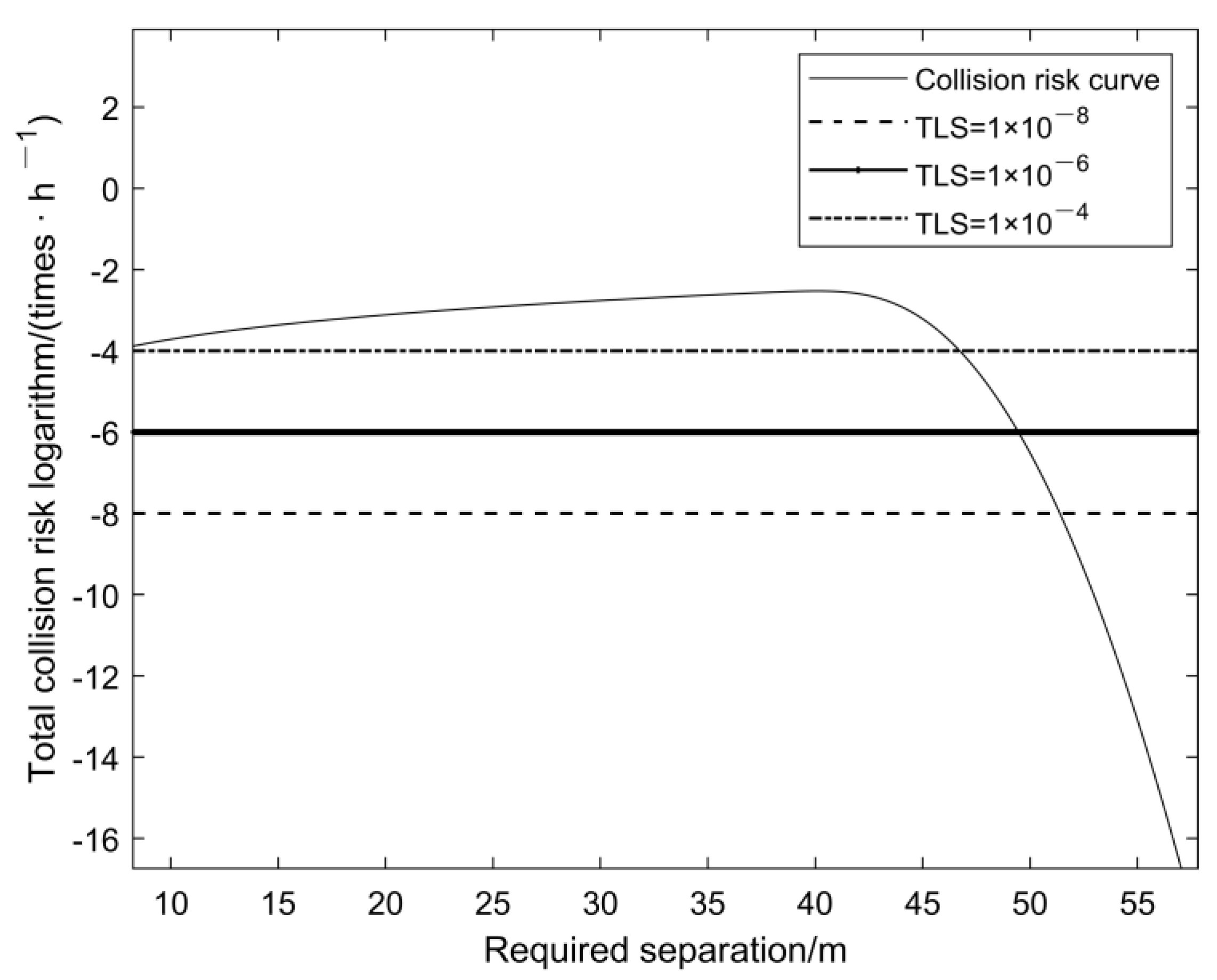
5.2.2. Analysis of Required Separation under Different TLS Values
6. Conclusions
- (1)
- The research problem in this paper is a new problem brought by new things. At present, at home and abroad, including ICAO and JARUS, the operating separation standard for urban logistics UAVs has not been formulated. Based on the JARUS requirements for UAV operation aiming at the autonomous separation maintenance ability of UAVs, a method to calculate the required separation between UAVs is proposed.
- (2)
- As the basis of autonomous separation maintenance ability of UAVs, a two-stage track prediction method is proposed, which breaks through existing track prediction methods. By using K-means, track classification and identification are realized, serving as macro-level track classification. For similar tracks, the Adam–LSTM model is employed to achieve refined track prediction, serving as micro-level track prediction. Compared to the traditional model, the method proposed in this paper can more accurately achieve track prediction.
- (3)
- There is uncertainty in the calculation of the conflict frequency. The calculation of the conflict frequency in the model is directly related to traffic density. As the flow within a unit airspace increases, the value will also increase, thereby ultimately affecting the required separation. The selection of the TLS also has a significant impact on the calculation of separation. The relatively strict TLS provided by JARUS is adopted in this paper. With the accumulation of UAVs’ operational experience and the development of the industry, the TLS will be larger; that is, the required separation value will gradually decrease.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brooker, P. Future air traffic management: Quantitative en route safety assessment part 2–new approaches. J. Navig. 2002, 55, 363–379. [Google Scholar] [CrossRef]
- Alligier, R.; Gianazza, D.; Durand, N. Machine learning and mass estimation methods for ground-based aircraft climb prediction. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3138–3149. [Google Scholar] [CrossRef]
- Zeng, W.; Quan, Z.; Zhao, Z.; Xie, C.; Lu, X. A deep learning approach for aircraft track prediction in terminal airspace. IEEE Access 2020, 8, 151250–151266. [Google Scholar] [CrossRef]
- Ma, L.; Tian, S. A hybrid CNN-LSTM model for aircraft 4D track prediction. IEEE Access 2020, 8, 134668–134680. [Google Scholar] [CrossRef]
- Zhang, X.; Mahadevan, S. Bayesian neural networks for flight track prediction and safety assessment. Decis. Support Syst. 2020, 131, 113246. [Google Scholar] [CrossRef]
- Zhang, J.; Jiang, H.; Wu, X.; Tang, X. Four-dimensional track prediction based on BADA and aircraft intention. J. Southwest Jiaotong Univ. 2014, 49, 553–558. [Google Scholar]
- Wang, T.; Huang, B. A four-dimensional flight track prediction model based on improved Kalman filter. J. Comput. Appl. 2014, 34, 1812–1815. [Google Scholar]
- Lv, B.; Wang, C. Application of improved extended Kalman filter in aircraft 4D track prediction algorithm. J. Comput. Appl. 2021, 41 (Suppl. S1), 277–282. [Google Scholar]
- Shi, Q.; Wang, W.; Han, P. Short-term 4D track prediction algorithm based on online updated LSTM network. J. Signal Process. 2021, 37, 66–74. [Google Scholar]
- Hesam, S.; Amelia, C.R. 4D flight track prediction using a hybrid Deep Learning prediction method based on ADS-B technology: A case study of Hartsfield–Jackson Atlanta International Airport (ATL). Transp. Res. Part C 2022, 144, 103878. [Google Scholar]
- Zeng, W.; Chu, X.; Xu, Z.; Liu, Y.; Quan, Z. Aircraft 4D track Prediction in Civil Aviation: A Review. Aerospace 2022, 9, 91. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, K.; Zhu, W. Aircraft 4D track Prediction during Climbing and Descending Stages. Sci. Technol. Eng. 2023, 23, 7582–7588. [Google Scholar]
- Graham, W.; Orr, R.H. Terminal air traffic flow and collision exposure. Proc. IEEE 1970, 58, 328–336. [Google Scholar] [CrossRef]
- Endoh, S. Aircraft Collision Models. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 1982. [Google Scholar]
- Weibel, R.E.; Hansman, R.J. Safety Considerations for Operation of Unmanned Aerial Vehicles in the National Airspace System: ICAT-2005-1; MIT ICAT: Cambridge, MA, USA, 2006. [Google Scholar]
- Anders LC Henrik, S. Probability of Low-Altitude Midair Collision Between General Aviation and Unmanned Aircraft. Risk Anal. 2019, 39, 2499–2513. [Google Scholar]
- Christopher, W.L.; Blake, W. A Risk Based Paradigm and Model for Unmanned Aerial Systems in the National Airspace. 29 March 2011. Available online: https://www.aa.washington.edu/sites/aa/files/research/afsl/publications/lum_risk_for_uavs_2010_2.pdf (accessed on 18 November 2023).
- JAR-DEL-WG6-D.04; Guidelines on Specific Operations Risk Assessment (SORA). JARUS: Cologne, Germany, 2019.
- Nikodem, F.; Dittrich, J.S.; Bierig, A. The New Specific Operations Risk Assessment Approach for UAS Regulation Compared to Common Civil Aviation Risk Assessment. 25 January 2019. Available online: https://www.dglr.de/publikationen/2019/480130.pdf (accessed on 18 November 2023).
- Pérez-Castán, J.A.; Comenadador, F.G.; Rodríguez-Sanz, A.; Cabrera, I.A.; Torrecilla, J. RPAS conflict-risk assessment in non-segregated airspace. Safety Sci. 2019, 111, 7–16. [Google Scholar] [CrossRef]
- Valtteri, K.; Aaron, M. Collision Risk Modeling and Analysis for Lateral Separation to Support Unmanned Traffic Management. Risk Anal. 2022, 22, 854–881. [Google Scholar]
- Li, Q.; Gan, X.; Sun, J.; Wang, M. Risk assessment of lateral collision between military UAV and civil aviation flight. J. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 724–730. [Google Scholar]
- Bubbles D4.1; Algorithms for Analysing the Collision Risk. SESAR: Brussels, Belgium, 2021.
- Yao, D.; Ma, J.; Zhao, G. On the safety assessment for the collision risk between the civilian and military airplanes. J. Saf. Environ. 2017, 17, 1637–1641. [Google Scholar]
- Wang, L.; Yang, J. Research on assessment method of safety separation for logistics UAVs based on position error probability model. J. Saf. Sci. Technol. 2022, 18, 184–192. [Google Scholar]
- DOC 9689; Manual on Airspace Planning Methodology for the Determination of Separation Minima. ICAO: Montreal, QC, Canada, 1998.
- WG-A/WP8; ICAO RGCSP (Review of the General Concept of Separation Panel). RGCSP Working Group Meeting: Summary of Discussions and Conclusions. ICAO: Montreal, QC, Canada, 1995.
- Falanga, D.; Kleber, K.; Scaramuzza, D. Dynamic obstacle avoidance for quadrotors with event cameras. Sci. Robot. 2020, 5, 9712–9720. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Prediction error | N(5.47, 1.252) | |
| Collision threshold | 5 m | |
| Load factor | LF | 1.1 g |
| Roll angle | 25° | |
| Turning radius | R | 31.42 m |
| Turn rate | 21.88°/s | |
| UAV dimensions | 2.50 m × 2.50 m × 0.60 m |
| Variables | K-Means and Adam–LSTM Two-Stage Method | ||
|---|---|---|---|
| RMSE/m | MAE/m | MAPE/% | |
| Longitude | 6.12 | 4.58 | 5.65 |
| Latitude | 37.33 | 34.49 | 10.85 |
| Altitude | 1.64 | 1.28 | 5.68 |
| Total | 15.03 | 13.45 | 7.39 |
| Variables | Single LSTM | ||
| RMSE/m | MAE/m | MAPE/% | |
| Longitude | 9.58 | 8.76 | 8.52 |
| Latitude | 44.73 | 40.39 | 13.56 |
| Altitude | 2.41 | 1.95 | 5.85 |
| Total | 18.9 | 17.0 | 9.31 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Li, Z.; Luo, X.; Zhao, Y.; Lu, F. Study of Urban Unmanned Aerial Vehicle Separation in Free Flight Based on Track Prediction. Appl. Sci. 2024, 14, 5712. https://doi.org/10.3390/app14135712
Zhang J, Li Z, Luo X, Zhao Y, Lu F. Study of Urban Unmanned Aerial Vehicle Separation in Free Flight Based on Track Prediction. Applied Sciences. 2024; 14(13):5712. https://doi.org/10.3390/app14135712
Chicago/Turabian StyleZhang, Jian, Zongxiao Li, Xinyue Luo, Yifei Zhao, and Fei Lu. 2024. "Study of Urban Unmanned Aerial Vehicle Separation in Free Flight Based on Track Prediction" Applied Sciences 14, no. 13: 5712. https://doi.org/10.3390/app14135712
APA StyleZhang, J., Li, Z., Luo, X., Zhao, Y., & Lu, F. (2024). Study of Urban Unmanned Aerial Vehicle Separation in Free Flight Based on Track Prediction. Applied Sciences, 14(13), 5712. https://doi.org/10.3390/app14135712