Abstract
In this work, we present a study on seat suspension technology that integrates pneumatic muscles, marking a significant advancement in active vibration control. This innovative approach addresses the limitations of traditional suspension systems, providing enhanced comfort and adaptability. A key achievement is the development of a mathematical model for controlling horizontal seat vibration, which serves as a valuable design tool for evaluating seat suspension under various conditions and control strategies. The creation of a custom microcontroller, benchmarked against a standard from National Instruments, highlights the practical applications of this research. Positive results suggest a promising future for this technology in industrial settings, where vibration reduction is critical. The system’s scalability and user-adjustable signal levels further enhance its potential for widespread industrial adoption.
1. Introduction
Artificial pneumatic muscles (PAMs), which mimic the behavior of biological muscles using compressed air or other gases, have a wide range of potential applications across various industries. In robotics, PAMs are frequently used due to their lightweight nature, high force-to-weight ratio, and inherent compliance and flexibility [1]. They are employed in robotic arms, legs, grippers, and other manipulators to perform tasks ranging from industrial assembly to surgical procedures [2]. PAMs are integral components in soft robotic systems, used in applications such as soft grippers, wearable devices, and bio-inspired robots where delicate handling or interaction with the environment is required [3,4,5,6,7]. They are also utilized in industrial automation for tasks such as material handling, gripping, and positioning, thanks to their robustness and ability to exert high forces.
The field of artificial pneumatic muscles has seen significant scientific and technological innovation, with research focusing on materials, processes, and performance improvement. However, despite their advantages, control challenges arise due to the inherent characteristics of PAMs, such as hysteresis, creep, and high nonlinearities [8,9]. These issues can pose significant challenges for accurate modeling and motion control, making the development of robust control strategies essential. For example, Lee et al. propose a patella-inspired linkage joint (PatLink) to address the trade-off problem between torque and speed in conventional mechanisms with PAMs [10]. Additionally, Cao et al. describe a link-type design driven by PAMs, with the driving torques transmitted to the leg orthoses via multiple linkages [11].
Recent studies indicate that PAMs remain a focal point in research. Šitum et al. [12] describe the design, construction, and testing of a manipulator driven by pneumatic artificial muscles. Experiments were conducted on a manipulator actuated by muscle actuators. One innovative approach is the folded Pneumatic Artificial Muscle (PAM), which allows control of the actuator’s motion through variations in its end geometry. Wang et al. [13] present a new concept for designing and controlling pneumatic actuators via end geometry. Their experiments demonstrate that closed-loop geometry control can achieve errors within 0.5% of the actuation range. The development of smart actuators that integrate bending sensors is also being explored, enabling self-monitoring and posture control in robots. Saga et al. [14] developed a smart PAM system with a bend sensor and reinforced PAM, verifying its effectiveness by comparing estimated and actual measured contraction. However, control problems arise due to the inherent characteristics of PAMs, such as hysteresis, creep, and high nonlinearities, which pose challenges for accurate modeling and motion control. Al-Ma’aita et al. [15] focus on characterizing hysteresis nonlinearities in pneumatic artificial muscles and their impact on performance in various systems. Zhong et al. [16] propose a simple and independent soft radial sensor for measuring the contraction length of the PAM. They developed a model to demonstrate the relationship between sensor resistance and contraction length.
Yan et al. propose a variable stiffness axial expansion pneumatic artificial muscle based on hexagonal origami [17]. They also present a kinematic analysis model detailing the changes in crease angles, air cavity volume, and geometric configurations of the pneumatic artificial muscles during the actuation process. To address the challenges posed by the complex nonlinearities and uncertainties of PAMs, a robust control strategy with disturbance compensation is proposed, ensuring accurate modeling and trajectory tracking. Qin et al. present a controller that effectively compensates for PAM’s hysteresis and attenuates external disturbances, improving the motion accuracy and robustness of PAM systems [18]. The field of artificial muscles is seeing significant scientific and technological innovation, with research focusing on materials, processes, and performance improvement. De Pascali et al. present a class of pneumatic artificial muscles called GRACE, which can be fabricated through low-cost additive manufacturing and enable lifelike movements [19].
Researchers are developing various types of pneumatic artificial muscles (PAMs) with different manufacturing processes and operating principles. Liang et al. propose a new energy-based nonlinear control method for 2-link PAM-actuated robots to achieve accurate positioning control [20]. This method imposes reasonable constraints on overshoots and terms coupled with control inputs, thereby reducing unnecessary energy loss and enhancing system safety. It provides high-performance positioning control with constrained overshoots and eliminated residual oscillations. PAMs are used in the design and construction of different robotic systems, including manipulator arms, to perform tasks such as transportation, sorting, and precise control. Kalita et al. present the development of various kinds of PAMs and extensively review force models and applications of PAMs in robotics, medicine, and industry [21]. Takashima et al. developed a pneumatic artificial rubber muscle using shape-memory polymer sheets (SMP), which could be utilized in seat suspension systems [22]. The SMP sheets are attached to a linear pneumatic artificial rubber muscle and evaluated for bending and tensile motion. Bending tests show reduced bending stiffness, and tensile tests reveal that the artificial muscle with the attached SMP sheet withstood high elongation loads without failure. Isotonic and isometric tests demonstrate that the prototype actuator can bend in two directions.
Additionally, pneumatic muscles have a wide range of applications in prosthetics and exoskeletons [1]. They can be integrated into prosthetic limbs and exoskeletons to provide natural movement and enhance strength and mobility for individuals with disabilities or those engaged in physically demanding activities. PAMs are also utilized in rehabilitation devices for physical therapy and recovery from injuries, assisting patients in regaining strength and mobility by providing adjustable resistance and assistance during exercises [23]. They are incorporated into various assistive devices such as lifting aids, mobility devices, and orthoses to aid individuals with mobility impairments. PAMs can also be integrated into wearable devices, such as smart clothing, for rehabilitation garments or for those performing physically demanding tasks. For example, Carvalho et al. developed and tested twelve pneumatic muscles to find the best combination for an elbow exoskeleton [24]. In their study, a pneumatic muscle actuator is used to actuate an exoskeleton for the elbow joint, designed with a novel hinge to compensate for the antagonistic nature of the pneumatic actuator. Another study proposes a novel pneumatic exoskeleton joint mechanism that uses a pneumatic artificial muscle (PAM) as an air tank and a pneumatic cylinder to generate torque, providing variable stiffness without the need for an external air supply [25]. Mišković et al. present the main innovation of the PAM being independent of an external air supply, using compressed air from a cylinder to inflate them. Variable stiffness is achieved by changing the pressure in the pneumatic cylinder and by contracting the PAM’s length. An improved multi-connector PAM (MPAM) is developed, mimicking the structure of human muscles and offering an increased contraction ratio and adaptability for soft robotic actuation [26]. Zhang et al. discuss the design of an improved MPAM that can be applied to a wide range of fields, including prosthetics, rehabilitation, and exoskeletons. The proposed 7 mm diameter MPAM produces an 8% greater contraction ratio than traditional muscles. The number of muscle fibers can be adjusted depending on the application, making this a versatile solution. The authors claim that this MPAM provides a simple new option for soft robotic actuation and has the potential to advance the development of soft robotic assistant suits. In another application, Zhou et al. propose a novel flat pneumatic artificial muscle made of silicone rubber and embedded fibers [27]. The fibers in the silicone substrate convert radial expansion into axial contraction. The flat PAM with the best structure and performance is fabricated, and a simple wrist exoskeleton is verified under real working conditions. Recent research introduces artificial intelligence (AI) methods in PAM design and modeling, which is crucial for building a PAM controller that meets the required performance and accuracy specifications. Mallouh et al. created various models for a PAM and evaluated them based on their accuracy in reflecting behavior [28]. Four modeling techniques were utilized: curve or surface fitting, Multi-Layer Perceptron Neural Network, Nonlinear Auto-Regressive, and Adaptive Neuro-Fuzzy Inference System (ANFIS). The results show that the Neural Network model achieves the smallest error among all the models.
In the aerospace and automotive industries, PAMs are used for functions such as actuating control surfaces, adjusting wing flaps, or providing assistive forces in vehicle suspensions [29]. Artificial pneumatic muscles, also known as McKibben artificial muscles, are used in various applications, including seat suspension systems. There are three basic types of commonly used seat suspension systems: passive, semi-active, and active. Typically, passive systems include spring and damper elements that protect drivers from harmful vibrations caused by road unevenness. These systems are effective in vibration reduction but only for over-resonant frequencies. However, low-frequency vibrations are amplified by passive systems due to the resonance effect. Semi-active suspensions can partially limit resonant vibrations through ongoing modifications of system stiffness or damping, but active systems are the most efficient for vibration attenuation in the low-frequency range. Although active systems have significant energy demands, they are increasingly used in automotive applications such as seat suspensions. Various actuators (e.g., electromagnetic, pneumatic, hydraulic) can generate the force necessary for active vibration control. PAMs, a type of soft actuator, are progressively used in mechanical engineering. Despite requiring an external air source, their dynamic properties are attractive due to low friction force. Unlike traditional pneumatic cylinders, PAMs have no sliding elements (no piston movement in a cylinder) and operate by creating a tension force during the contraction of retractile tubing (made of rubber material with spirally arranged fibers). Moreover, PAMs are flexible actuators that do not require complex kinematics for the transmission system in a suspension mechanism of limited space.
Maciejewski et al. discuss the dynamic modeling of a horizontal seat suspension using pneumatic muscles for active vibration control [30]. The control system presented is based on inverse models of the pneumatic muscles and a controller that calculates the desired active force. Using the dedicated control algorithm, significant vibration reduction transmitted to the human body is achieved. The active seat shows improved performance over the passive system in the 1–10 Hz frequency range.
Work machine vibrations significantly impact the health of operators, causing occupational diseases and decreasing work safety. These vibrations lead to fatigue and reduce the ability to efficiently perform specific tasks. Prolonged exposure to a vibrating environment adversely affects brain cortex processes such as perception, thinking, and memory. Even vibrations matching the natural frequencies of various human internal organs and body parts at small amplitudes negatively affect worker health and productivity. Numerous studies have determined statistical natural vibration frequencies, such as the head at 4 and 25 Hz, upper limbs at 3 Hz, and lower limbs at 5 Hz [31]. These frequencies can vary among individuals, depending on physical parameters.
Maciejewski et al. present a methodology for developing a model of a human sitting in a vehicle seat [32]. The work shows how the parameters of the model for a single person are selected experimentally using optimization methods. The vibrations affecting the operator’s body result from the interaction of subassemblies characterized by vibrations due to their operating principles, such as the operation of an internal combustion engine or the vehicle moving over uneven terrain. Due to the diverse construction of machines, their work characteristics, and the use of many mechanical subassemblies with different dynamic properties, workers are exposed to long-term vibrations of various acceleration values.
In this work, we develop an original controlled vibroisolation system where the active force is generated by two pneumatic muscles. This research focuses on reducing horizontal vibrations along the direction of the working machine’s movement, which are transmitted to the human body. To achieve this, we develop a proprietary microcontroller, which is compared with a commercially available device from National Instruments (NI) used in previous studies [30]. Our approach involves using inverse models of the pneumatic muscles to calculate the desired active force and suspension travel, implementing a new hardware solution, and developing a novel signal flow control algorithm. However, the assessment of the propagation of harmful vibrations in the entire body or individual organs of the driver is not the subject of this work. This requires the use of biomechanical (biodynamic) models of the driver’s body in simulation studies, such as those presented in [33,34].
The novelty of this paper includes the following points:
- The first proposal for the control design of a horizontal seat suspension based on the desired force in an active vibration reduction system and the inverse model of pneumatic muscles as force actuators;
- An original architecture of the microcontroller that controls proportional pressure valves to obtain the desired active force in real-time;
- An experimental investigation of the proposed control policy for random vibrations affecting human operators in typical heavy machinery during their work.
The significance of this work lies in its potential to improve the comfort and safety of machinery operators by effectively reducing harmful vibrations through advanced control strategies and innovative microcontroller design. Compared to the system presented in [30], the optimization of the seat suspension design in this work, particularly by replacing the hydraulic shock absorber with pneumatic muscles, simplifies the design and reduces costs without compromising effectiveness. This approach successfully meets the cost-effectiveness criterion by lowering production costs while maintaining system performance. Thus, this paper demonstrates a significant advancement in the application of PAMs for active seat suspension systems, offering a promising solution to a critical problem in industrial and automotive settings.
2. Physical and Mathematical Model of the Suspension System
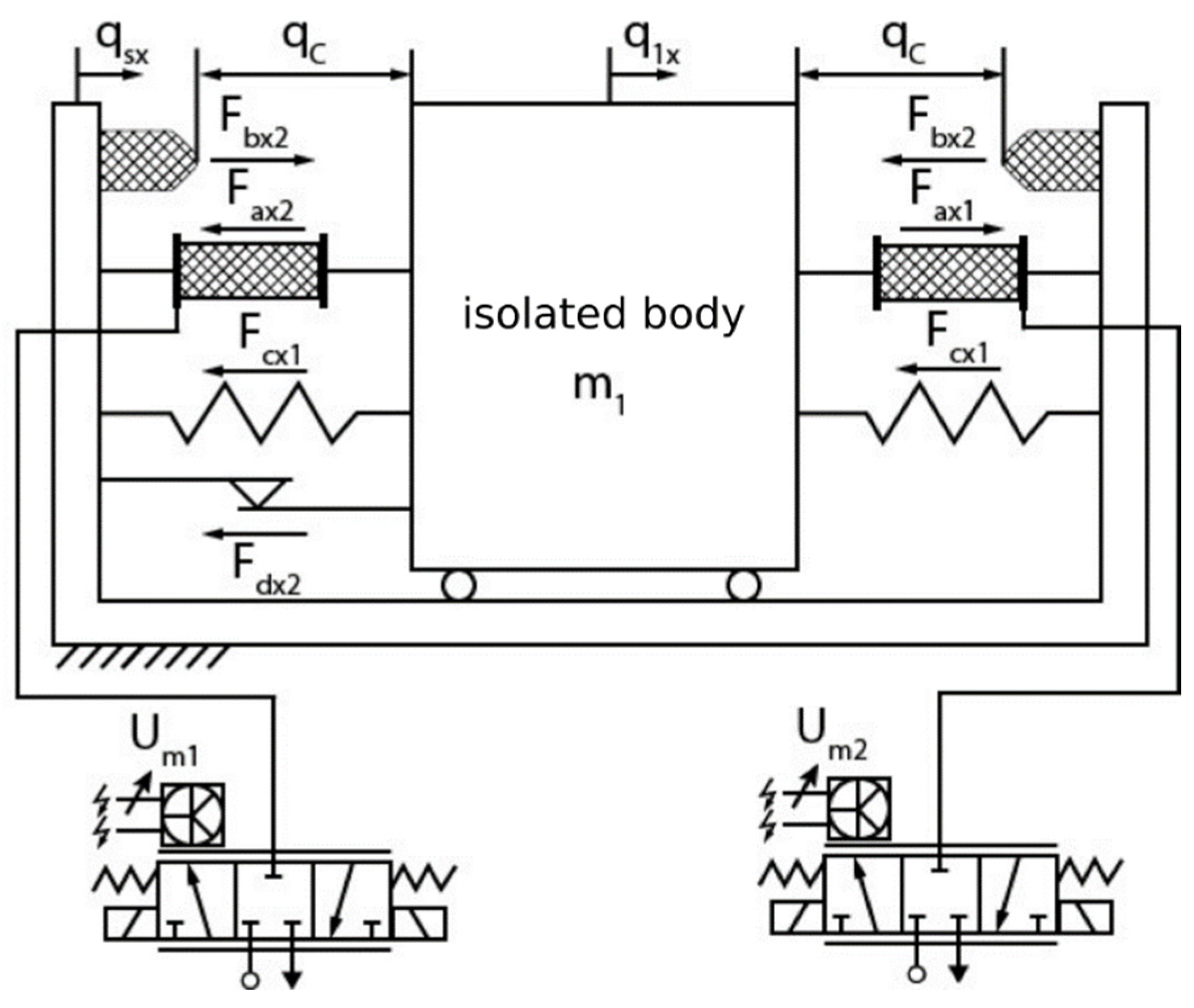
The subject of this study is a conventional seat suspension system that has been transformed into an active vibroisolation system through the integration of pneumatic muscle actuators. This enhancement aims to reduce vibrations generated when the working machine moves over uneven terrain, thereby improving operator safety. The research focuses on assessing the effectiveness of this specific seat suspension system without requiring a complex model of the human body seated. Instead, the evaluation uses a simplified representation, modeling the seat and the human body as a concentrated mass system (isolated body m1). This approach provides sufficient information to assess the quality and effectiveness of the suspension system in mitigating vibrations.
The system (Figure 1) is a hybrid combination of passive elements, such as tension coil springs and end bumpers, with active elements in the form of pneumatic muscles.
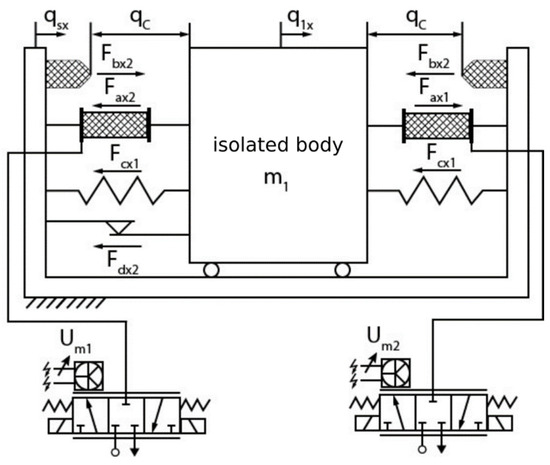
Figure 1.
Active Seat Suspension System.
A pneumatic muscle can be described as a variant of a single-acting pneumatic actuator. It consists of a flexible hose located in a braid. When filled with compressed air, its diameter increases while its length decreases. Thanks to this phenomenon, it generates the pulling force Fax1 and Fax2. The motion equation of the system (Figure 1) can be described as an ordinary differential equation:
where:
- m1—mass of the isolated body,
- q1x—displacement of the isolated body,
- Fcx1—reaction force of tension coil springs,
- Fbx2—reaction forces of end bumpers, limiting the maximum displacement of the suspension system,
- Fdx2—total friction force of the suspension system,
- Fax1, Fax2—forces generated by pneumatic muscles.
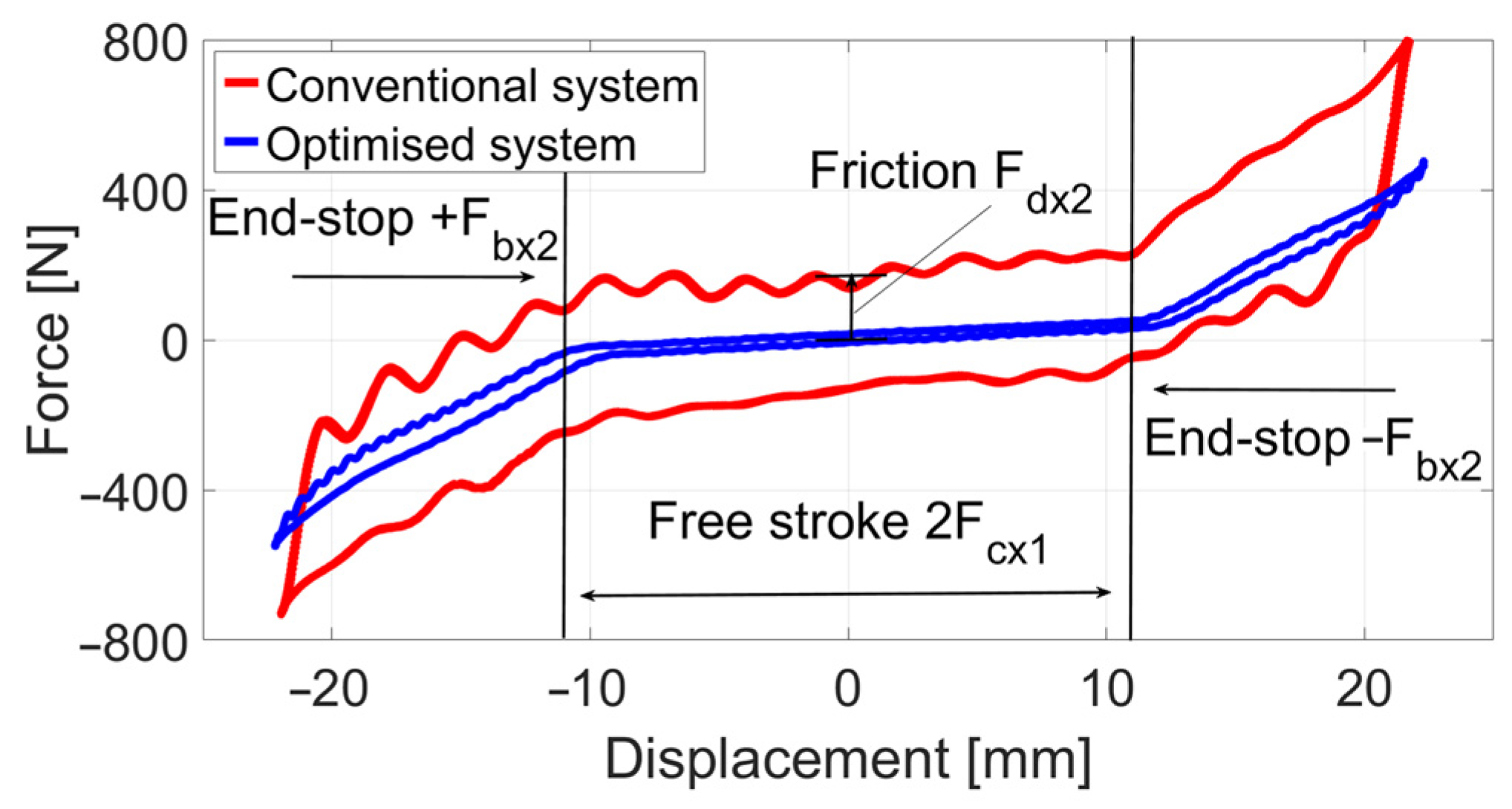
Force characteristics of the passive sub-system are presented in Figure 2. The optimized system uses tension springs of the lower forces 2Fcx1 and the reduced friction force Fdx2 of a suspension mechanism due to the application of the needle bearings instead of conventional plastic rollers. Such modifications allow for an increase in the intensity of the active vibration control by using the artificial pneumatic muscles. The forces ±Fbx2 of end-stop buffers are the same as conventional systems that are mounted to limit the maximum displacement of a suspension mechanism.
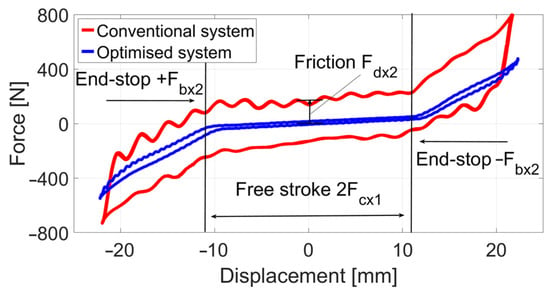
Figure 2.
Measured force characteristics of the passive sub-system.
The required active force values, which should be generated by the pneumatic muscles to compensate for the vibrations of the isolated body, are described as [19]:
where:
- qsx—is the displacement describing the forced motion of the suspension system,
- ka1—is the gain of the feedback loop from the absolute velocity of the isolated body,
- ka2—is the gain of the feedback loop from the relative displacement of the suspension system.
The gains ka1 and ka2 are the essential control parameters shaping the desired active force that have a significant influence on the suspension dynamics. The value of ka1 is responsible for vibration reduction of the isolated body, and the higher ka1 improves the ride comfort of the driver. On the contrary, the value of ka2 has the main influence on limiting the suspension travel and the higher ka2 ensures the controllability of a vehicle by the driver. Both values of these control parameters should be selected, taking into account the preferences and satisfaction levels of diverse drivers. Activities carried out as part of this paper assumed constant values of these parameters, and their first estimation is chosen as following ka1 = 600 Ns/m and ka2 = 900 N/m.
Using the relationships presented in work [30], the current values of air pressure required in individual pneumatic muscles to limit the vibrations of the isolated body were determined:
where:
- pm1, pm2—air pressure in individual pneumatic muscles,
- p0—atmospheric pressure,
- dm—diameter of individual pneumatic muscles,
- βm, μm, ηm,νm—constant parameters defining the shape of the nonlinear characteristics of pneumatic muscles,
- lm0—initial length of pneumatic muscles.
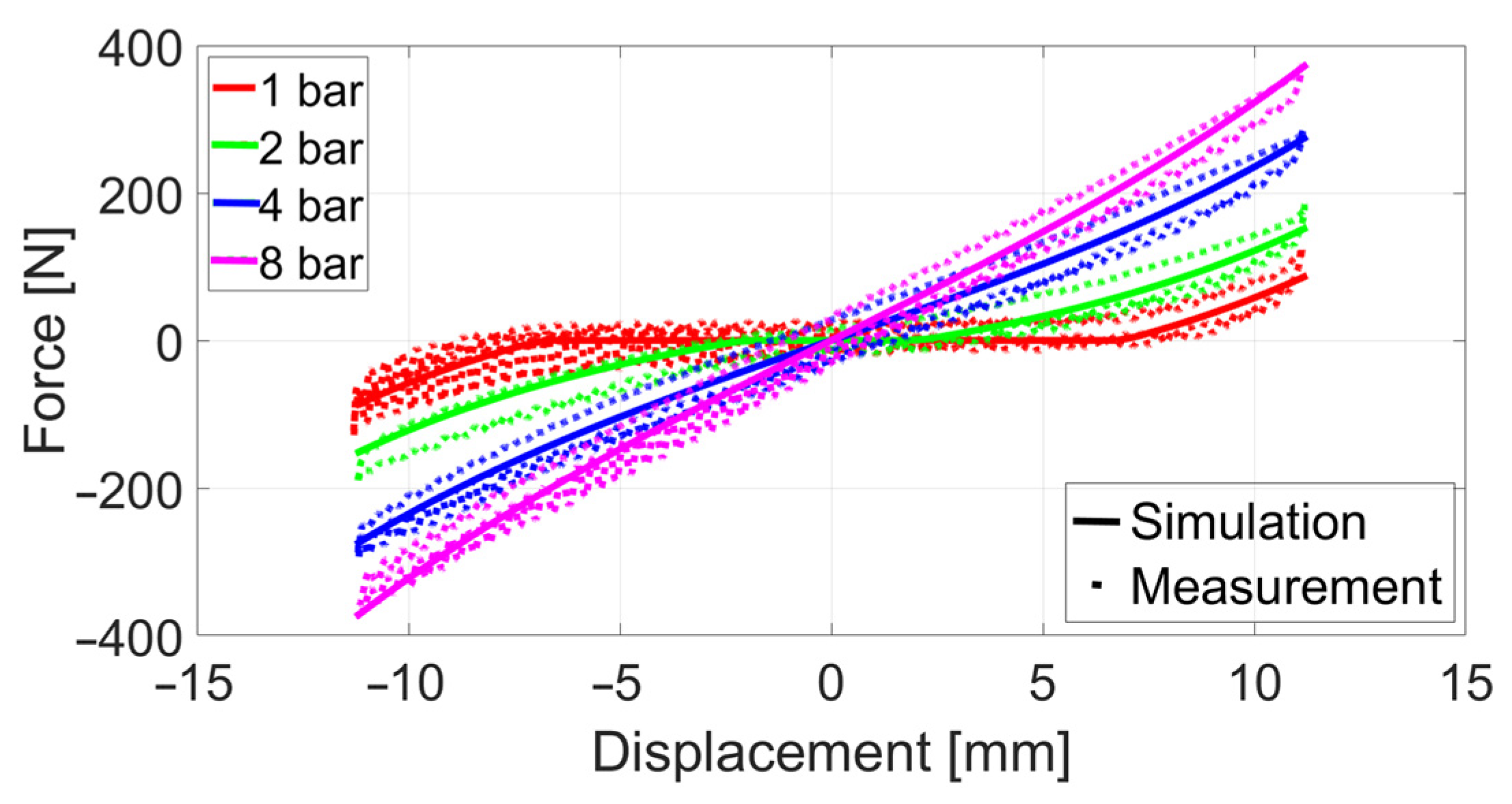
Model parameter identification of the PAMs is elaborated by performing force measurements of the horizontal seat suspension over its free-stoke (no contact with the bumpers). In order to evaluate the nonlinear characteristics of the PAMs, the tests are carried out at constant and the same pressures in both muscles, i.e., starting from a low pressure of 1 bar up to a maximum operating pressure of 8 bar. The selected force-displacement characteristics of the active sub-system are illustrated in Figure 3. The unknown model parameters βm, μm, ηm, and νm are determined by minimizing the relative error between simulated and measured forces in the displacement domain. The obtained discrepancies between these forces do not exceed 10%.
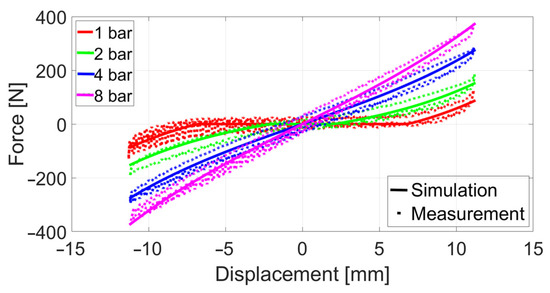
Figure 3.
Simulated and measured force characteristics of the active sub-system.
Summarizing Equation (1) is the general equation of motion in which there are active forces from both pneumatic muscles in the system. Equations (2) and (3) determine the desired forces controlling the system vibrations in the positive (forward) and negative (back) sides. This is because the pneumatic artificial muscles (PAMs) present in the system are single-sided actuators. In Equations (2) and (3), there is force, while in pneumatic artificial muscles, we regulate pressure, where the transition from force to pressure is implemented through Equations (4) and (5), describing the nonlinear inverse model of pneumatic artificial muscles. In this inverse model, pressures are calculated (not set by the control valve but are set by voltage), which is converted according to Formula (6). If the control voltage is 0 V, the PAM supply pressure is 0 bar; if the voltage is 10 V, the pressure is 10 bar.
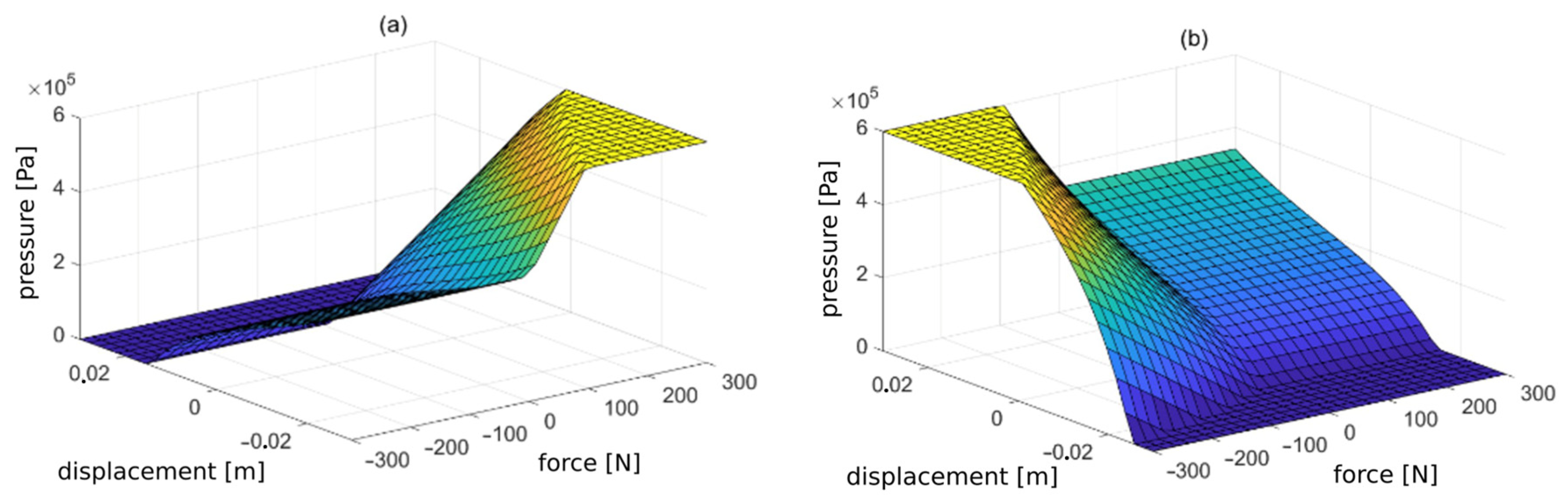
In Figure 4, the calculated air pressure values (pm1, pm2) in individual pneumatic muscles are presented as functions of active forces (Fax1, Fax2) generated by these elements and the relative displacement (q1x − qsx) of the suspension system. The charts presented the graphic representation of Equations (4) and (5), i.e., a nonlinear inverse model of the first and second pneumatic artificial muscles as a function of the desired control force and system displacements. From the graphs below, it can be seen that when the system displacement is zero, the pressure in individual muscles is maintained at a set level. This state is associated with the need to maintain the static equilibrium position of the system. Thanks to this solution, the seat is in a central position relative to the base on which it was mounted.
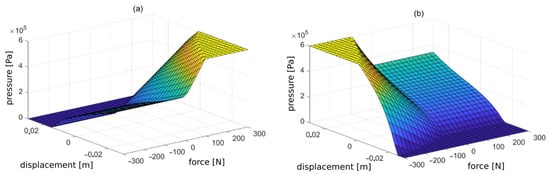
Figure 4.
The calculated air pressure values pm1 (a) and pm2 (b) in individual pneumatic muscles as functions of active forces and relative displacement of the suspension system.
Proportional pressure valves were used to control the pneumatic muscles. Therefore, it was assumed that the current air pressure values (pm1, pm2) in individual muscles are directly proportional to the control signals regulating the operation of the respective valves (um1, um2), which is expressed by the following relationships:
where:
- km1, km2—static gains of proportional pressure valves.
3. Hardware Implementation of the Microcontroller
3.1. Block Diagram of Information Flow
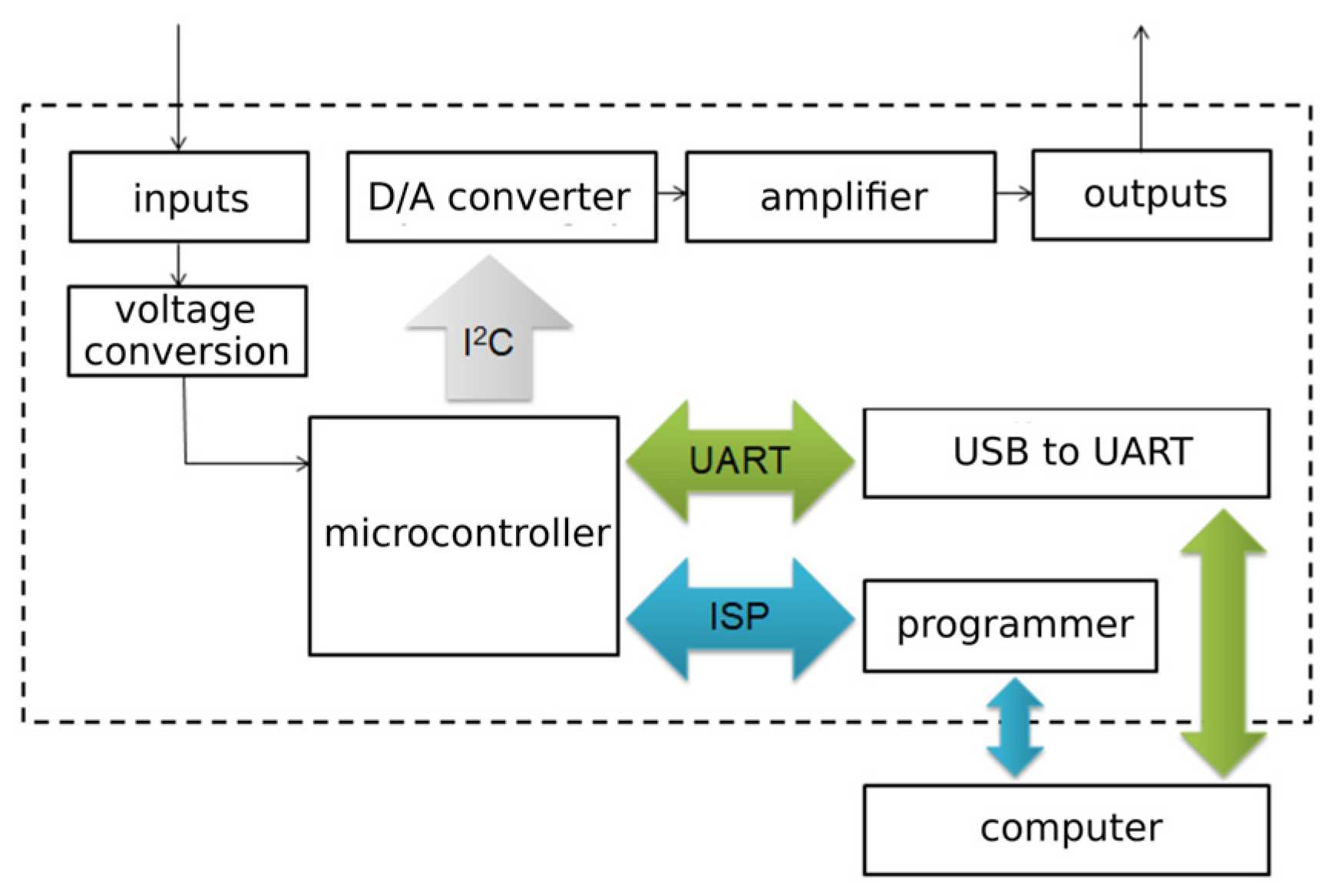
A block diagram illustrates the flow of information in the developed control system (Figure 5). Analog voltage signals (0–10 V) from position and speed sensors are scaled using a resistive divider to the voltage range supported by the microcontroller (0–5 V). These signals are then converted to digital form by a 10-bit analog-to-digital converter. The prepared data are processed by the microcontroller according to the programmed control algorithm to establish a control signal for the executive systems. For this purpose, the signals are transferred from the two microcontroller outputs to 12-bit digital-to-analog converters, which convert the digital signals into corresponding analog voltage signals in the range of 0–5 V. The executive devices are two proportional valves with a nominal input signal value of 0–10 V. Therefore, the processed signals determined by the microcontroller are amplified twice using an operational amplifier.
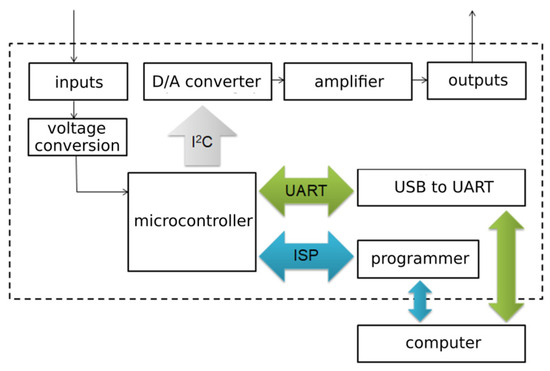
Figure 5.
Block Diagram of Information Flow in the Microcontroller.
Thanks to the USB-UART converter (Future Technology Devices International Limited, Unit 1, 2 Seaward Place, Centurion Business Park, Glasgow, G41 1HH, UK), the microcontroller allows for the transmission of selected measurement data or messages to a desktop computer. However, due to high resource consumption, it is only used during testing or device calibration. In the electronic unit, an input was introduced that enables the programming of the microcontroller in an environment adapted for programming the Atmega328p (Microchip Technology Inc., 2355 West Chandler Blvd. Chandler, AZ, USA) system [35].
3.2. Hardware
3.2.1. Power Supply
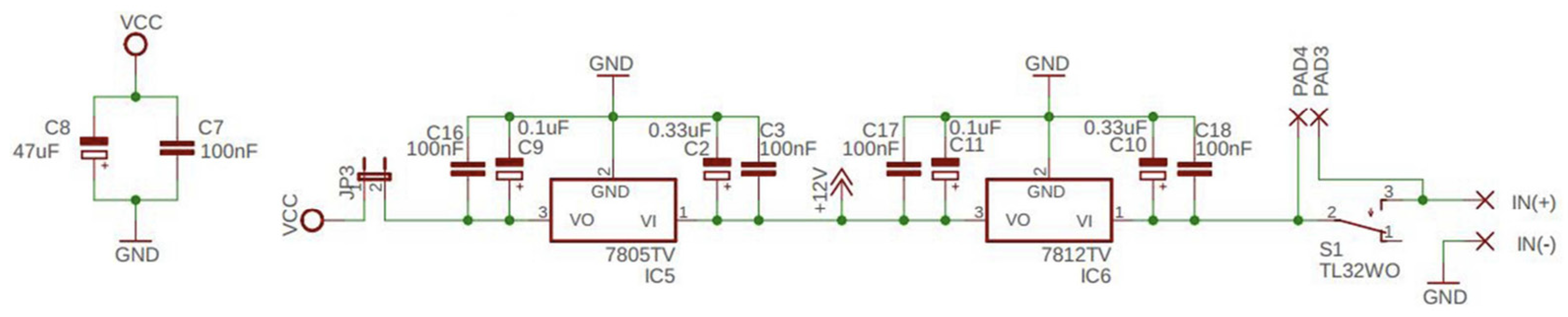
Two voltage stabilizers are used in the power supply system. The capacitors, connected to the ground, filter interference at the input and output of the regulators. The noise protection is provided by an analog filter (Figure 6).
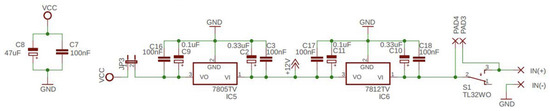
Figure 6.
Power supply diagram with filtration.
3.2.2. Inputs Signals
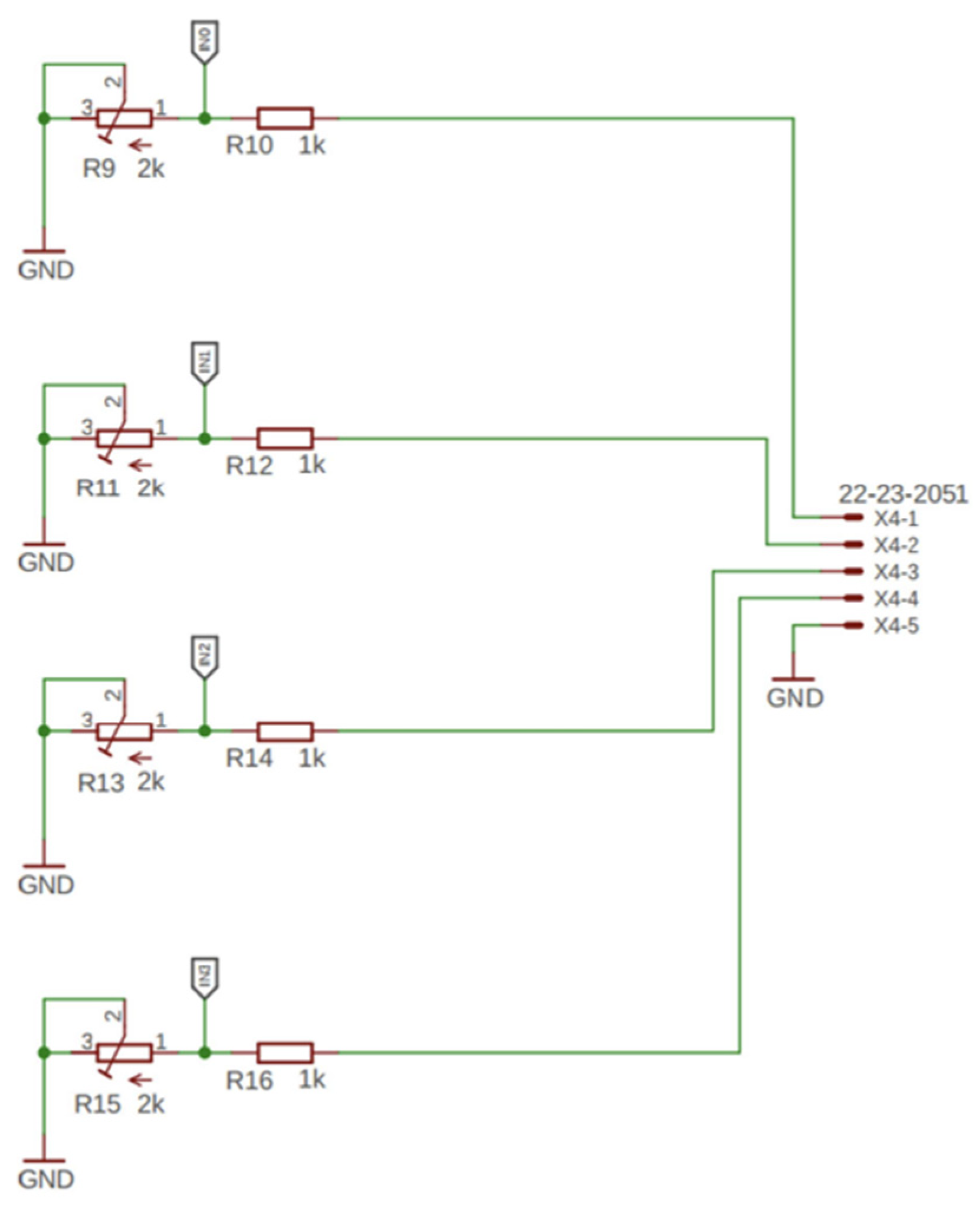
Considering the tolerance of the resistors used, and the required measurement accuracy, one resistor in each resistive divider was replaced with a precise potentiometer (Figure 7). This adjustment ensures that the measured value does not have a systematic error.
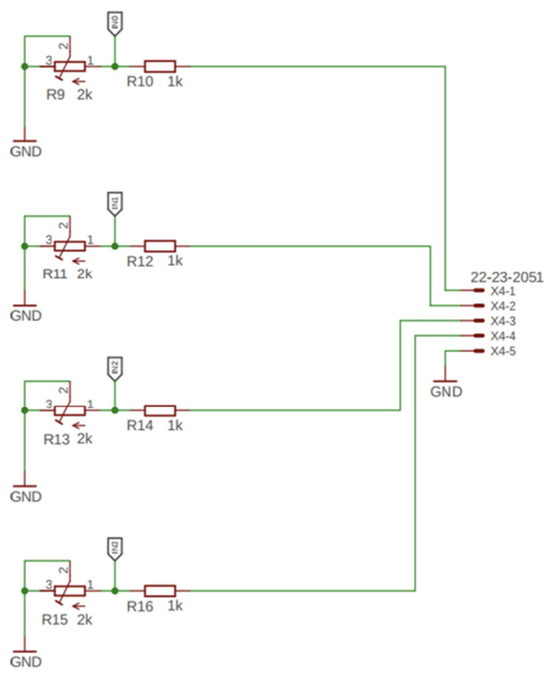
Figure 7.
Input signals diagram.
3.2.3. Output Signals
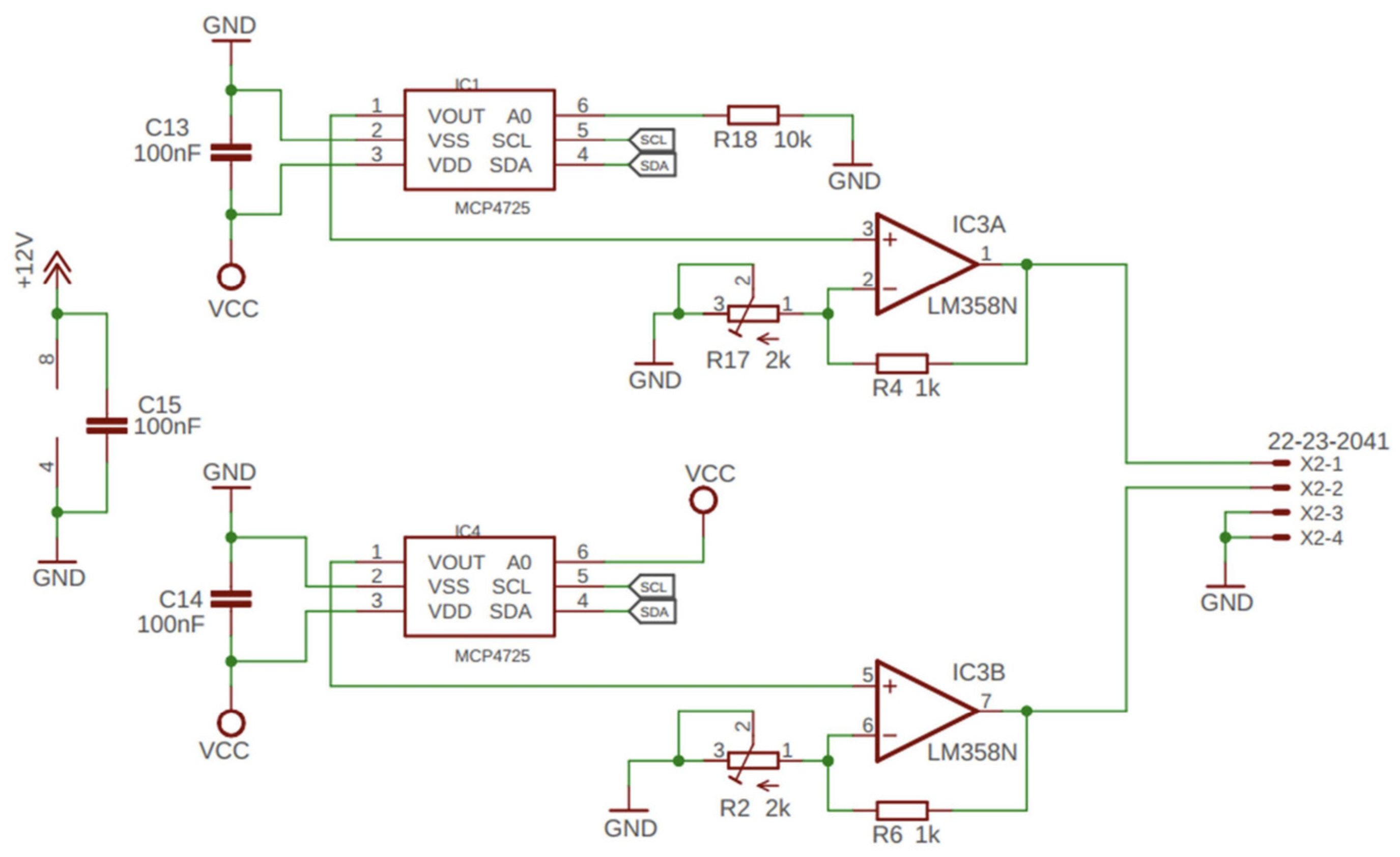
The microcontroller outputs signals via the I2C bus to digital-to-analog converters (DACs). These signals are subsequently amplified using non-inverting amplifiers. To mitigate the sensitivity of amplifiers to resistor tolerance, one of the adjustable resistors in each amplifier pair was substituted with a precision potentiometer. This adjustment enables precise calibration of the amplification process. The connection diagram illustrating the controller outputs is depicted in Figure 8.
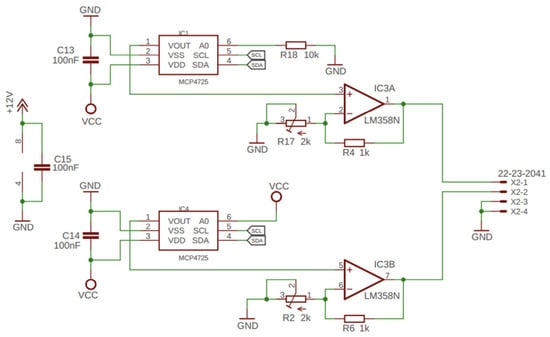
Figure 8.
Wiring diagram of output signals.
3.2.4. Microcontroller
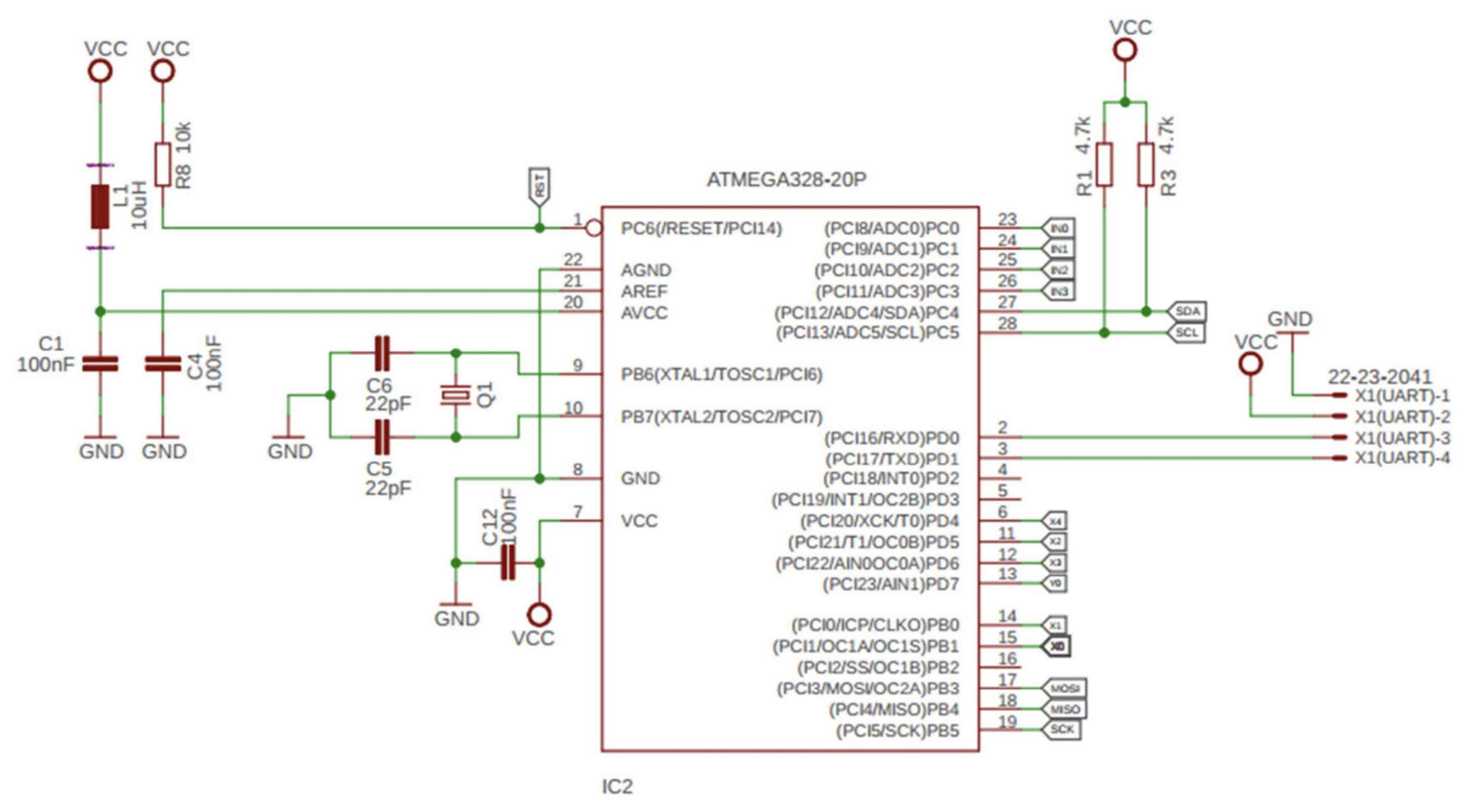
The project employs the Atmega328p microcontroller (Microchip Technology Inc. 2355 West Chandler Blvd. Chandler, AZ, USA). Capacitors C1, C4, and C12 are connected to the AREF and AVCC power inputs (Figure 9) to filter disturbances originating from the microcontroller. Additionally, the L1 choke contributes to further filtering of disturbances.
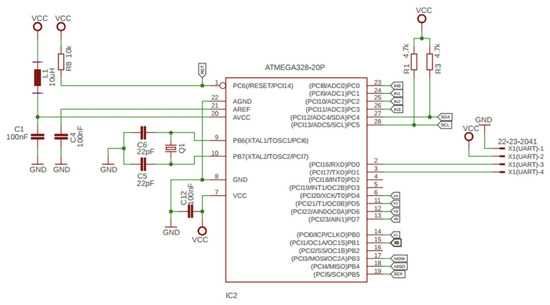
Figure 9.
Microcontroller wiring diagram.
3.2.5. Top Panel
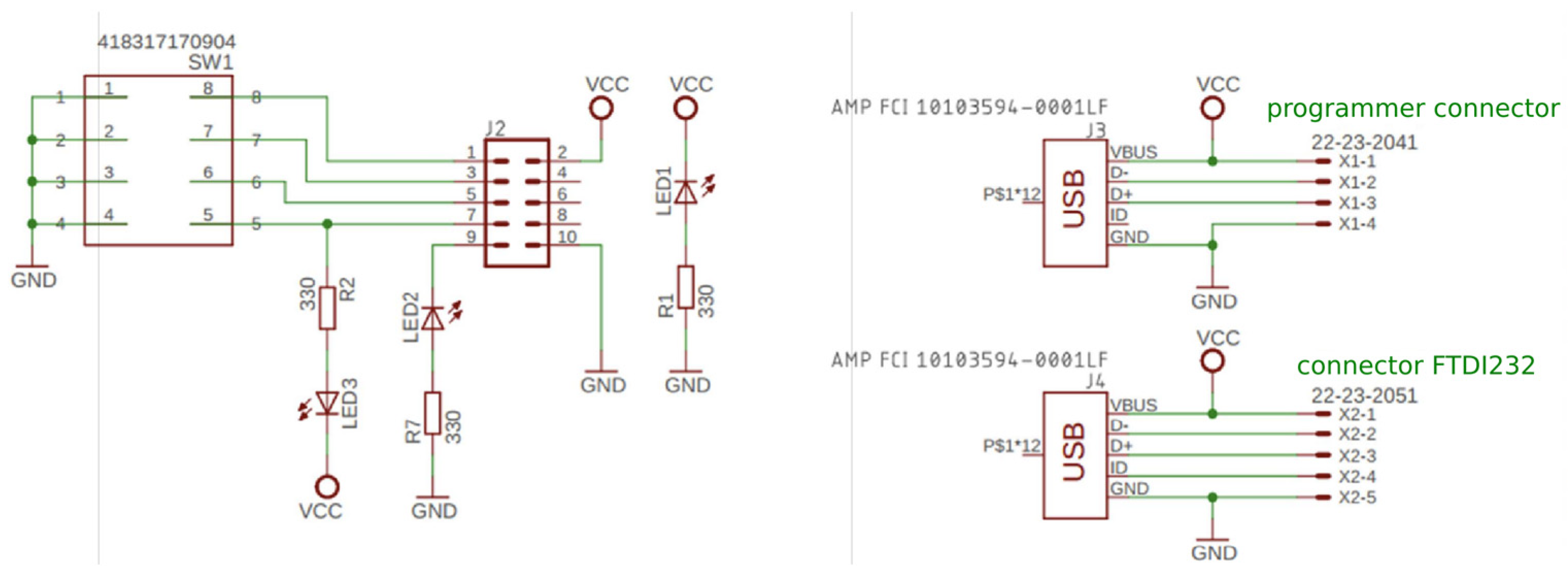
The top panel serves primarily as a mounting platform for LEDs and buttons intended for user interaction. All buttons within the SW1 subassembly are programmable. To indicate the current operational status of the controller to the operator, three LEDs are employed. Additionally, the panel features two USB Micro-B sockets, facilitating communication with the programmer inside the controller and the FTDI232 system. The finalized diagram of the upper panel board is depicted in Figure 10.
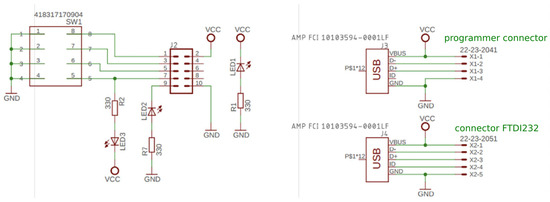
Figure 10.
Top panel connection diagram.
3.2.6. PCB Board
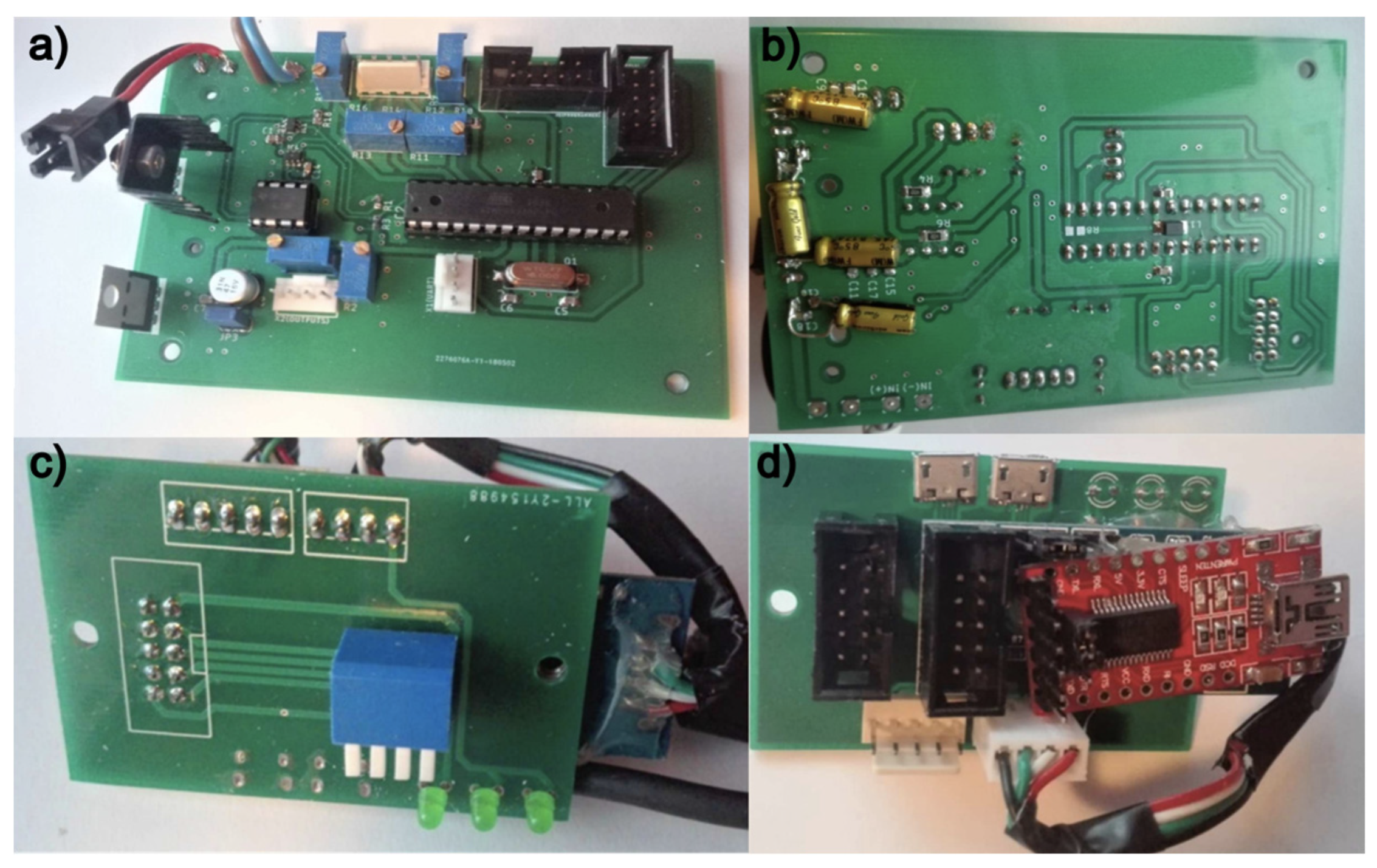
Figure 11 depicts the completed controller PCBs alongside electronic components and the programmer.
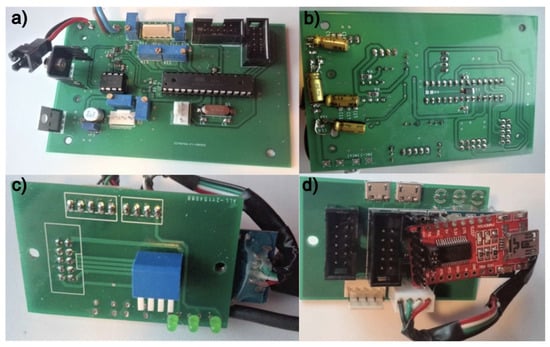
Figure 11.
Driver PCB board with components: view from the top (a), from the bottom (b), top panel PCB board with components (c), programmer and FTDI232 (d).
4. Results
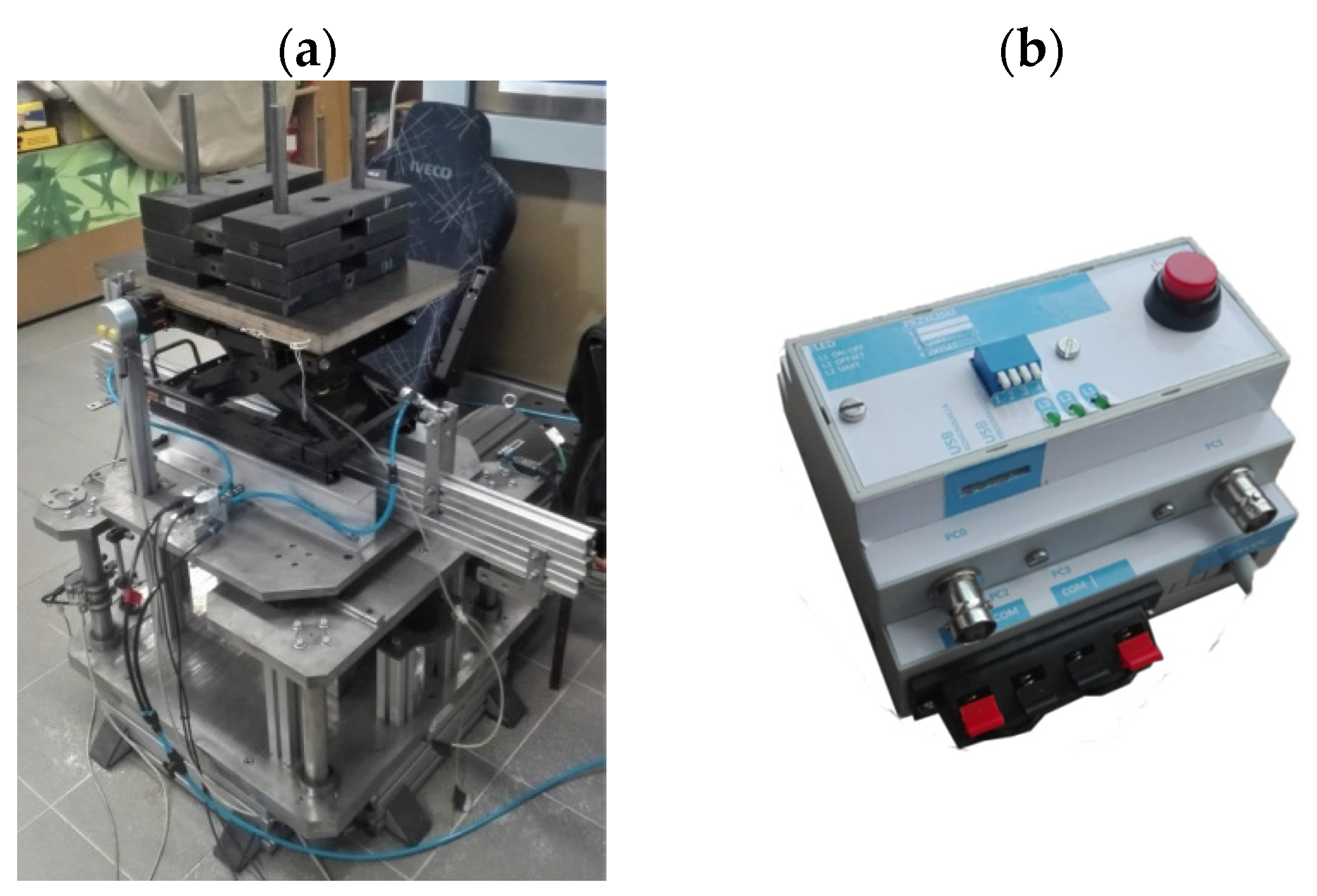
During the experimental studies conducted, an electromagnetic exciter was utilized, upon which the seat suspension system, along with the load, was mounted (Figure 12a).
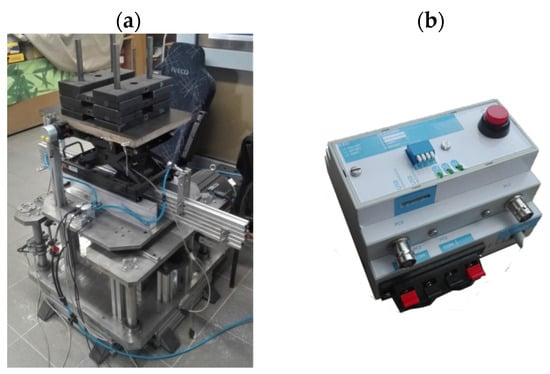
Figure 12.
A laboratory station for determining the vibration isolation properties of an active suspension system (a) and a custom microcontroller developed for the purpose of controlling seat vibrations in real-time (b).
The system is subjected to mechanical vibrations, which are generated in one of the horizontal directions, i.e., consistent with the direction of movement of the working machine on uneven terrain. Using the developed microcontroller (Figure 12b), the seat vibrations are controlled in real-time. The task of the microcontroller is to calculate the control signals for the proportional air pressure valves inside both pneumatic muscles for the currently read measurement signals (according to the control algorithm described by relationships (2)–(6). In the case of the presented system, information from the absolute velocity sensors of the isolated body and the relative displacement of the suspension system is used.
For the purpose of determining the effectiveness of the suspension system, acceleration values of the isolated body, relative displacement of the suspension system, and acceleration of the vibration platform are measured.
Although drivers of the earth-moving machinery are not exposed to vibrations in a single direction during their work, only such signals are defined by the International Organization for Standardization [31]. The ISO 7096:2020 (Earth-moving machinery—Laboratory evaluation of operator seat vibration) standard specifies a laboratory method for measuring and evaluating the effectiveness of seat suspension in reducing vertical whole-body vibration transmitted to operators of earth-moving machines at frequencies between 1 Hz and 20 Hz [36]. Standard also sets acceptance criteria for seats used on various machines, indicating which machines have sufficiently low vertical vibration transmission that seat suspension is not required in this direction. The standard highlights that the laboratory method focuses on measuring vibration in one direction, which is why examining the reduction of horizontal vibrations is important to minimize the overall vibrations affecting the operator. This standard provides the laboratory evaluation of operator seat vibration along one axis of the vibration transmission, i.e., the axis for which the suspension system was designed.
Measurements are carried out in the case of three signals forcing vibrating motion, whose spectral characteristics represent vibrations occurring in popular working machines, such as:
- EM3—wheel loaders with a net weight above 4500 kg;
- EM5—wheel dozers;
- EM6—crawler dozers and loaders.
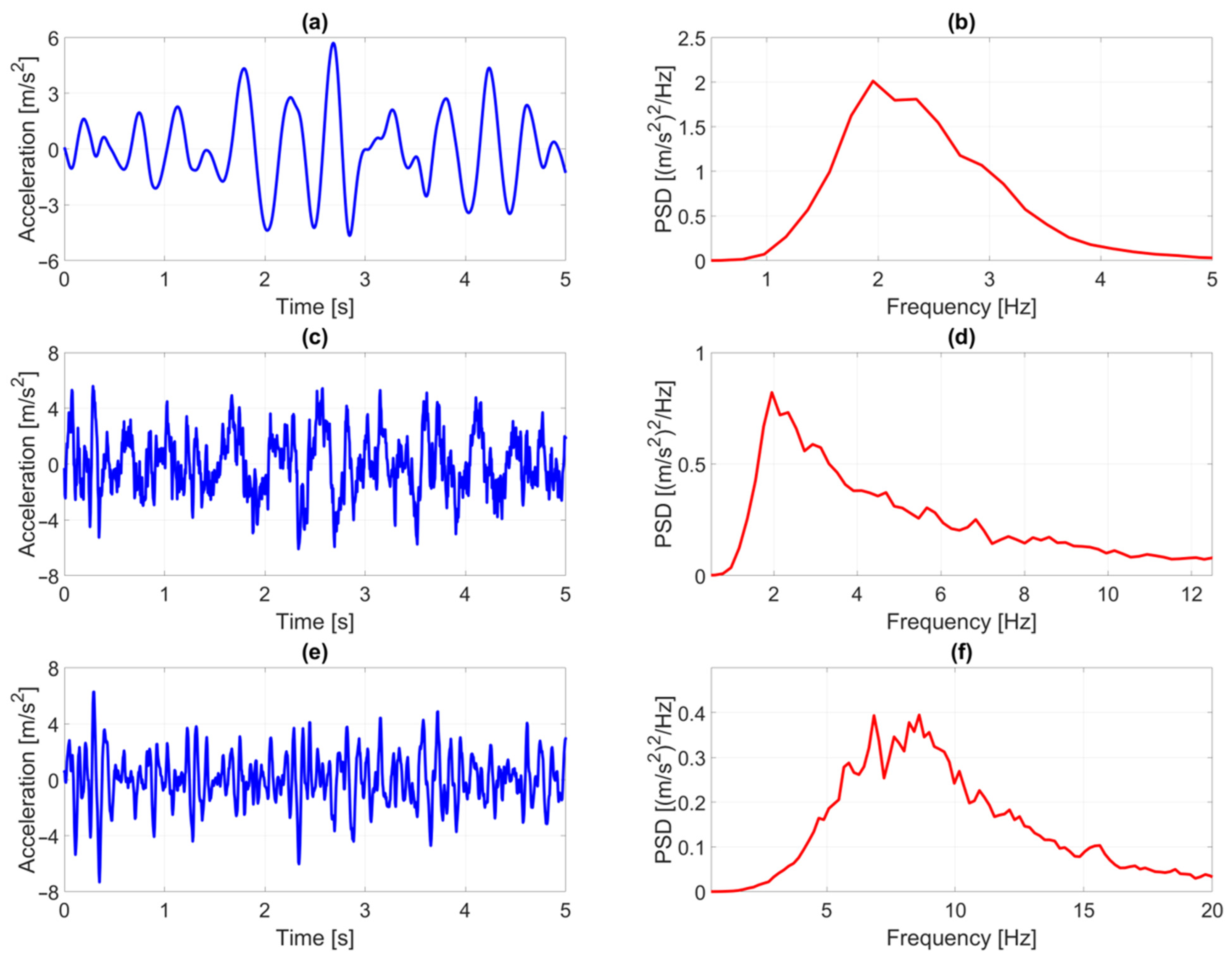
Time histories of the acceleration signals mentioned above and the corresponding Power Spectral Densities (PSD) are illustrated in Figure 13. The EM3 signal exhibits the lowest frequency range (Figure 13b) but the highest power. Conversely, the EM6 signal displays the highest frequency range (Figure 13f) but the lowest power among the signals considered. The frequency content of the EM5 signal (Figure 13d) lies between the aforementioned signals, with a moderate power level in the input acceleration.
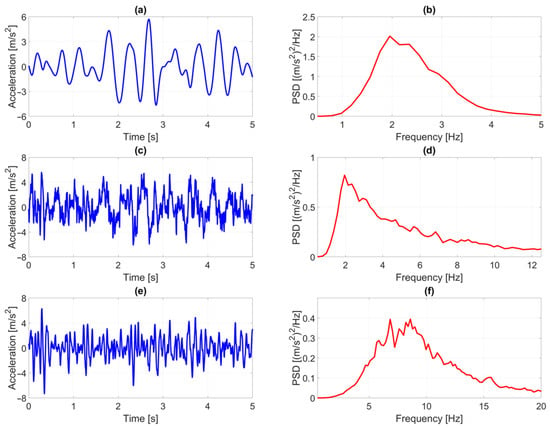
Figure 13.
Time histories of the acceleration signals: EM3 (a), EM5 (c), EM6 (e) and corresponding Power Spectral Densities of the excitation signals: EM3 (b), EM5 (d), EM6 (f).
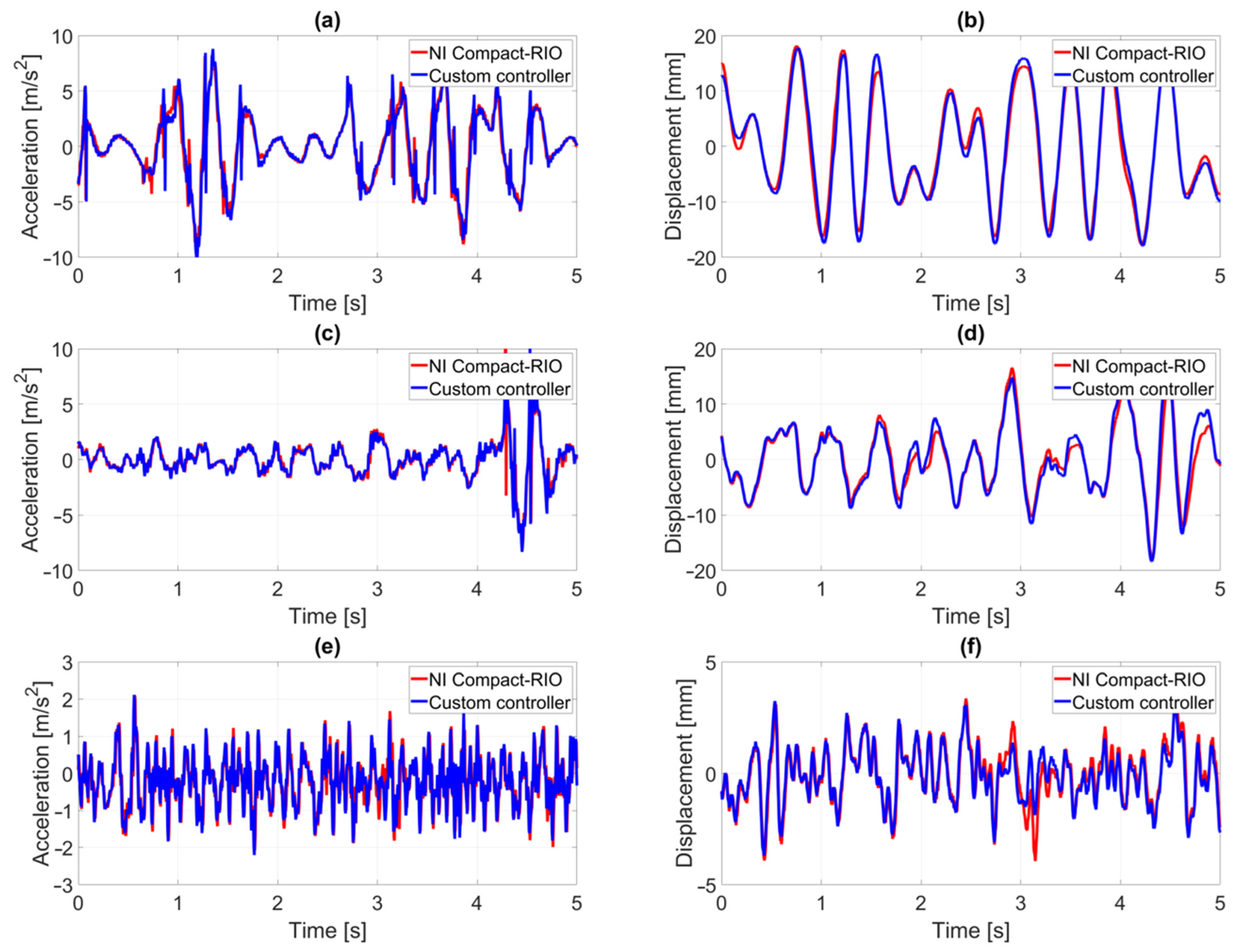
To acquire measurement data, a National Instruments device, model SC-2345 (Apex Waves, Cary, NC, USA), is employed in conjunction with a control and measurement application developed in the LabVIEW environment. Figure 14 illustrates the acceleration and vibration displacement waveforms of the system obtained using the custom microcontroller (blue line) and the commercially available real-time controller NI CompactRIO-9074 (Apex Waves, NC, USA) (red line).
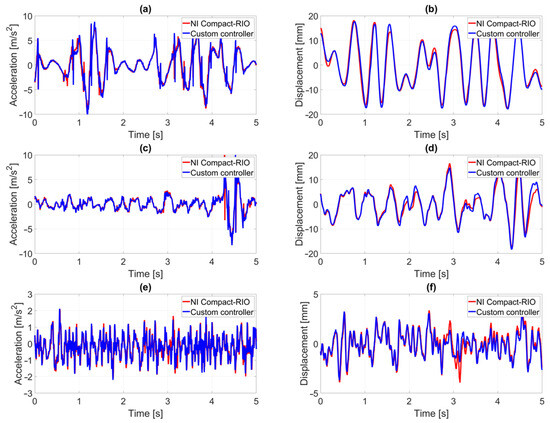
Figure 14.
Acceleration waveforms of the isolated body’s vibrations and relative displacement of the suspension system obtained using the NI CompactRIO-9074 controller and the custom microcontroller with the signals EM3 (a,b), EM5 (c,d), EM6 (e,f).
In analyzing the dynamics of the motion of the studied object (Figure 13), minor discrepancies can be observed in the operation of the seat suspension system, where active force is generated through two distinct control systems: the widely adopted NI CompactRIO-9074 controller and the microcontroller developed as part of this study. These slight variations in the performance of the control systems stem from notable disturbances induced by the electromagnetic vibration exciter. This exciter was utilized to simulate vibrations typically encountered on the floor of an operator’s cabin in a working machine under laboratory conditions.
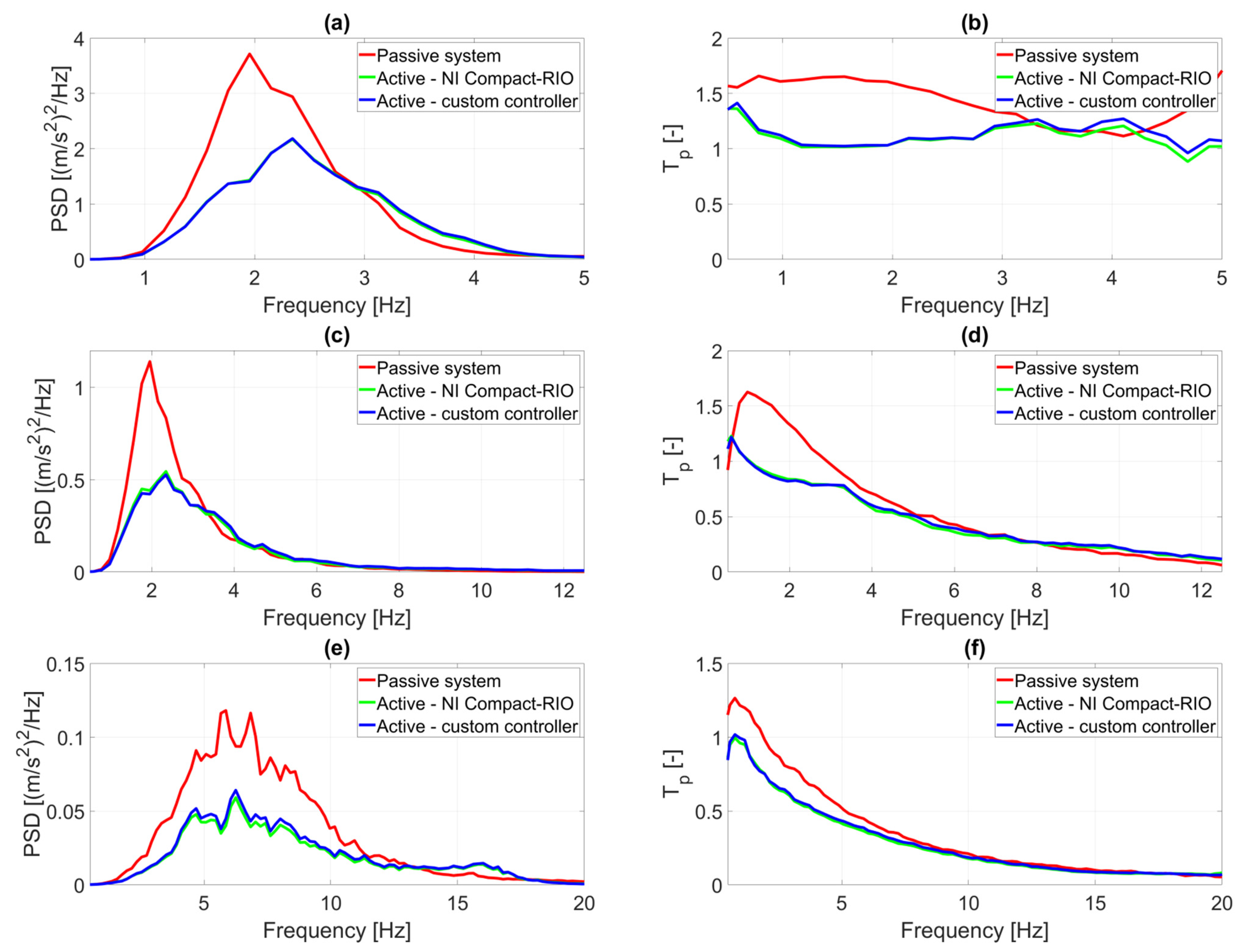
To qualitatively assess the vibration isolation process, the aforementioned measurement data were processed into their spectral representations using a Matlab (Matlab_2023b) application. Utilizing the discrete Fourier transform [17], a frequency analysis of the measured signals was conducted to determine the spectral power densities of the isolated body’s acceleration vibrations and the transfer functions of the suspension system. Graphical representations of these analyses for three distinct signals inducing vibrating motion (EM3, EM5, and EM6) are presented in Figure 15.
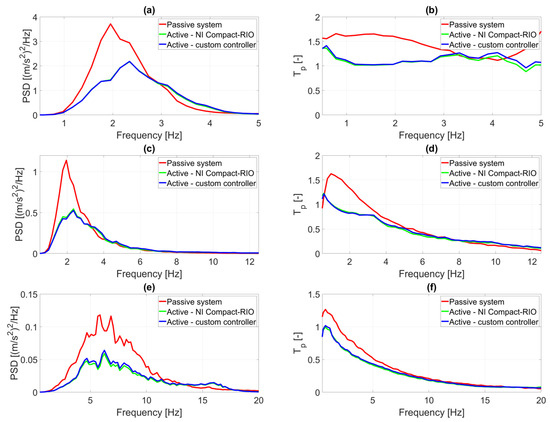
Figure 15.
Power Spectral Densities (PSD) of the acceleration of the isolated body vibration and transfer functions (Tp) of the suspension system obtained using the NI CompactRIO-9074 controller and the custom microcontroller in comparison with a passive system for the excitation signals: EM3 (a,b), EM5 (c,d), EM6 (e,f).
From the spectral representations of the measured signals (Figure 15), it is evident that the power spectral densities of the isolated body’s vibrations and the transfer functions of the active suspension system are comparable for both applied controllers. Observable differences in the performance of these control systems indicate slightly faster information processing by the NI CompactRIO-9074 controller and its greater resilience to external disturbances. However, the cost of constructing the microcontroller proposed in this study is significantly lower than that of the commercially available real-time controller from National Instruments.
Different frequency ranges: 0.5–5.0 Hz (Figure 15a,b), 0.5–12.5 Hz (Figure 15c,d), and 0.5–20 Hz (Figure 15e,f) are connected to various frequencies of the excitation signals (Figure 13). Beyond these frequency ranges, no input vibrations are applied to the suspension system; therefore, the transmissibility functions tend to infinity as the ratio of output-to-input. However, the transmissibility behavior of both active systems (NI Compact-RIO and custom controller) is much better compared to the passive seat. For the excitation signal EM3 (Figure 15b), the transmissibility function slightly fluctuates around 1 due to the high amplitudes of suspension displacement (almost ±20 mm—Figure 14b) that create numerous contacts with the end-stop buffers. For the lower vibration amplitudes (Figure 14d,f), the end-stop impacts occur only occasionally; therefore, the transmissibility functions of the active system begin with the value 1 and tend towards 0 (typical behavior for active seat suspensions). The clear peaks of PSD in Figure 15a and Figure 14c at around 2 Hz indicate the resonance frequency of the horizontal suspension system, and the several peaks in the range of 4 to 10 Hz in Figure 15e come from the nonlinear system behavior (e.g., friction) for over-resonant frequencies.
In contrast to a passive suspension, the active system proposed here consumes energy during operation. The energy consumption depends on the input vibrations applied to the system, specifically related to the amplitude and frequency of the excitation signal. The maximum power measured for the signals discussed in this paper is as follows: 98.1 W for excitation EM3, 63.5 W for excitation EM5, and 31.9 W for excitation EM6.
5. Conclusions
The objective of this research was to compare the performance of a custom microcontroller solution for active vibration reduction in seat suspensions with a high-end commercially available controller. The controller was developed with low implementation costs in mind, which is an extremely important criterion in automotive systems, as described by Glowinski et al. in [35].
Utilizing the Atmega328p microcontroller enabled a significant reduction in the overall control system cost, achieving more than a tenfold reduction compared to the commercially available NI CompactRIO-9074 controller. This cost-effectiveness was achieved without compromising system performance, as evidenced by comparable results in performance graphs. Moreover, the affordability did not compromise the reliability and effectiveness of the system, validated through extensive testing and analysis.
The CompactRIO-9074 offers significantly greater computing power and memory compared to the module designed around the Atmega328p microcontroller (Table 1). It is specifically tailored for advanced industrial applications. While the Atmega328p microcontroller is more suitable for simple embedded systems, it proved entirely sufficient for the developed pneumatic artificial muscle control system, as evidenced by the achieved results. However, when considering the implementation costs of a professional controller like the CompactRIO-9074 and comparing it to the solution based on the Atmega microcontroller, a cost reduction of over 10 times is evident.

Table 1.
Comparison of the most important parameters of the designed module based on Atmega 328p with the parameters of the commercial National Instruments CompactRIO-9074.
Analysis of the dynamics of the tested object’s movement reveals slight differences in the operation of the seat suspension system. These variances arise when comparing the generation of active force between two control systems: a widely used commercial controller and a proprietary controller. The discrepancies largely stem from significant interference caused by the electromagnetic vibration exciter used to replicate floor vibrations in the operator’s cabin of the operating machine under laboratory conditions. Power spectral densities for body acceleration and suspension system transfer functions indicate that both controllers yield comparable results in terms of isolated body vibration and suspension system performance. The commercial NI CompactRIO-9074 controller was observed to process information faster and exhibit greater resilience to external interference. However, the proprietary controller developed proves significantly more cost-effective than its commercial counterpart from National Instruments. By implementing the control system on a microcontroller using a C++ program, the dynamics of control signal development were enhanced, and the noise level of control signals was reduced compared to the CompactRIO controller. Consequently, the costs associated with the control system were markedly decreased. As demonstrated by the results in Figure 14, these new solutions, which minimize controller and suspension structure costs, do not compromise system efficiency—thus adding value. In essence, the production costs of the controller were reduced, and the design simplified, yet the effectiveness of the suspension system remained uncompromised.
In automotive applications, the decision between commercial and proprietary controllers can significantly influence both the performance and cost-effectiveness of vehicle systems. Commercial controllers are renowned for their speed, durability, and ability to withstand the demanding conditions typical of automotive environments, including extreme temperatures, vibrations, reliability, and extended operational lifespans. These attributes make them well-suited for critical system applications such as autonomous driving systems or advanced driver-assistance systems, where failure is not an option. Conversely, proprietary controllers, which are more cost-effective, may find use in less critical vehicle functions where top-tier performance is not essential, such as seat suspension systems. The solutions proposed in this study enable manufacturers to reduce costs while meeting the fundamental requirements of seat suspension systems. Ultimately, the choice between commercial and proprietary controllers hinges on the specific needs of the vehicle system, balancing factors such as performance, robustness, and cost. Manufacturers carefully consider these aspects to optimize the overall functionality and economic viability of their automotive products.
The proposed solutions can be tailored to the needs of manufacturers, offering a balance between costs and performance without sacrificing the necessary requirements for durability and reliability. In practical applications, this approach may achieve the required operating parameters while reducing production costs, which is attractive to manufacturers. It is also worth emphasizing that this work presents test and analysis results confirming that the proposed systems can effectively fulfill their functions in real operating conditions. Therefore, the proposed solutions are viable options in practical applications, provided they have been properly tested and adapted to the specific requirements of a given application.
Finally, it should be noted that the prototype and laboratory tests presented in this work are crucial for initial validation, but durability tests require far more extensive conditions and time frames. Scheduling these tests during the implementation phase will help accurately evaluate the long-term performance of the solution in this system.
Author Contributions
Conceptualization, I.M., S.P. and T.K.; methodology, I.M. and T.K.; software, S.P.; validation, I.M., S.P. and A.B.; formal analysis, S.P. and A.B.; investigation, S.P.; resources, I.M.; data curation, I.M. and S.P.; writing—original draft preparation, S.P., A.B., I.M., S.G. and T.K.; writing—review and editing, S.G.; visualization, S.P. and A.B.; supervision, S.G. and T.K.; project administration, I.M.; funding acquisition, S.G., A.B. and I.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The participants of this study did not give written consent for their data to be shared publicly.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Glowinski, S.; Ptak, M. A Kinematic Model of a Humanoid Lower Limb Exoskeleton with Pneumatic Actuators. Acta Bioeng. Biomech. 2022, 24, 145–157. [Google Scholar] [CrossRef]
- Xie, D.; Su, Y.; Shi, X.; Tong, S.F.; Li, Z.; Tong, R.K.Y. A Compact Elbow Exosuit Driven by Pneumatic Artificial Muscles. IEEE Robot. Autom. Lett. 2024, 9, 3331–3338. [Google Scholar] [CrossRef]
- Di Natali, C.; Sadeghi, A.; Mondini, A.; Bottenberg, E.; Hartigan, B.; De Eyto, A.; O’Sullivan, L.; Rocon, E.; Stadler, K.; Mazzolai, B.; et al. Pneumatic Quasi-Passive Actuation for Soft Assistive Lower Limbs Exoskeleton. Front. Neurorobot. 2020, 14, 31. [Google Scholar] [CrossRef] [PubMed] [PubMed Central]
- Daerden, F.; Lefeber, D. Pneumatic artificial muscles: Actuators for robotics and automation. Eur. J. Mech. Environ. Eng. 2002, 47, 11–21. [Google Scholar]
- Tondu, B. Modelling of the McKibben artificial muscle: A review. J. Intell. Mater. Syst. Struct. 2012, 23, 225–253. [Google Scholar] [CrossRef]
- Suzumori, K. Biologically Inspired Robotics Using Soft Materials; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Davis, S.; Caldwell, D.G.; Tsagarakis, N. The initial development of a pneumatic muscle actuator. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2003, 217, 251–261. [Google Scholar]
- Zhang, X.; Sun, N.; Liu, G.; Yang, T.; Fang, Y. Hysteresis Compensation-Based Intelligent Control for Pneumatic Artificial Muscle-Driven Humanoid Robot Manipulators with Experiments Verification. IEEE Trans. Autom. Sci. Eng. 2023, 1–14. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, N.; Liu, G.; Yang, T.; Yang, J. Disturbance Preview-Based Output Feedback Predictive Control for Pneumatic Artificial Muscle Robot Systems with Hysteresis Compensation. IEEE/ASME Trans. Mech. 2024, 1–13. [Google Scholar] [CrossRef]
- Lee, S.; Lee, D.; Shin, D. Patella-Inspired Linkage Joint: Power Amplifier for Pneumatic Artificial Muscles. IEEE/ASME Trans. Mechatron. 2024, 1–11. [Google Scholar] [CrossRef]
- Cao, Y.; Zhang, M.; Huang, J.; Mohammed, S. Prescribed performance control of a link-type exoskeleton powered by pneumatic muscles with virtual elasticity. Nonlinear Dyn. 2024, 112, 10043–10060. [Google Scholar] [CrossRef]
- Šitum, Ž.; Herceg, S.; Bolf, N.; Ujević Andrijić, Ž. Design, Construction and Control of a Manipulator Driven by Pneumatic Artificial Muscles. Sensors 2023, 23, 776. [Google Scholar] [CrossRef]
- Wang, S.; Frias Miranda, E.; Blumenschein, L.H. The Folded Pneumatic Artificial Muscle (foldPAM): Towards Programmability and Control via End Geometry. IEEE Robot. Autom. Lett. 2023, 8, 1383–1390. [Google Scholar] [CrossRef]
- Saga, N.; Shimada, K.; Inamori, D.; Saito, N.; Satoh, T.; Nagase, J. Smart Pneumatic Artificial Muscle Using a Bend Sensor like a Human Muscle with a Muscle Spindle. Sensors 2022, 22, 8975. [Google Scholar] [CrossRef] [PubMed]
- Al-Ma’aita, M.; Zgoul, M.; Janaideh, M.A. Experimental Hysteresis Characterization in Pneumatic Artificial Muscles. In Proceedings of the 2019 IEEE Jordan International Joint Conference on Electrical Engineering and Information Technology (JEEIT), Amman, Jordan, 9–11 April 2019; pp. 113–117. [Google Scholar] [CrossRef]
- Zhong, S.; Gai, Z.; Yang, Y.; Zhao, Y.; Qi, Y.; Yang, Y.; Peng, Y. A contraction length feedback method for the McKibben pneumatic artificial muscle. Sens. Actuators A Phys. 2022, 334, 113321. [Google Scholar] [CrossRef]
- Xu, Y.; Fang, Q.; Li, H. Kinematic and quasi-static analysis model of a novel variable stiffness pneumatic artificial muscle. Sens. Actuators A Phys. 2021, 329, 112815. [Google Scholar] [CrossRef]
- Qin, Y.; Zhang, H.; Wang, X.; Sun, N.; Han, J. Adaptive Set-Membership Filter Based Discrete Sliding Mode Control for Pneumatic Artificial Muscle Systems with Hardware Experiments. IEEE Trans. Autom. Sci. Eng. 2023, 21, 1682–1694. [Google Scholar] [CrossRef]
- De Pascali, C.; Giovanna, A.; Palagi, S.; Scharff, R.B.; Mazzolai, B. 3D-printed biomimetic artificial muscles using soft actuators that contract and elongate. Sci. Robot. 2022, 7, eabn4155. [Google Scholar] [CrossRef] [PubMed]
- Liang, D.; Sun, N.; Wu, Y.; Chen, Y.; Fang, Y.; Liu, L. Energy-Based Motion Control for Pneumatic Artificial Muscle Actuated Robots with Experiments. IEEE Trans. Ind. Electron. 2022, 69, 7295–7306. [Google Scholar] [CrossRef]
- Kalita, B.; Leonessa, A.; Dwivedy, S.K. A Review on the Development of Pneumatic Artificial Muscle Actuators: Force Model and Application. Actuators 2022, 11, 288. [Google Scholar] [CrossRef]
- Takashima, K.; Okamura, Y.; Iwamoto, D.; Noritsugu, T.; Mukai, T. Development of Pneumatic Artificial Rubber Muscle Using Segmented Shape-Memory Polymer Sheets. J. Robot. Mechatron. 2023, 35, 113–124. [Google Scholar] [CrossRef]
- Cao, Y.; Chen, X.; Zhang, M.; Huang, J. Adaptive Position Constrained Assist-as-Needed Control for Rehabilitation Robots. IEEE Trans. Ind. Electron. 2024, 71, 4059–4068. [Google Scholar] [CrossRef]
- Carvalho, A.D.D.R.; Karanth, N.; Vijay Desai, P. Characterization of pneumatic muscle actuators and their implementation on an elbow exoskeleton with a novel hinge design. Sens. Actuators Rep. 2022, 4, 100109. [Google Scholar] [CrossRef]
- Mišković, L.; Dežman, M.; Petrič, T. Pneumatic Exoskeleton Joint with a Self-Supporting Air Tank and Stiffness Modulation: Design, Modeling, and Experimental Evaluation. IEEE/ASME Trans. Mech. 2024, 1–12. [Google Scholar] [CrossRef]
- Zhang, S.; Gong, D.; Yu, J. Design of a Multi-connection Pneumatic Artificial Muscle. In Proceedings of the 2022 12th International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Baishan, China, 27–31 July 2022; pp. 301–306. [Google Scholar] [CrossRef]
- Zhou, Z.; Ai, Q.; Meng, W.; Liu, Q.; Xie, S.Q.; Zhou, W. Design and Finite Element Modeling of Novel Flat Pneumatic Artificial Muscles. In Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Sapporo, Japan, 11–15 July 2022; pp. 1341–1346. [Google Scholar] [CrossRef]
- Mallouh, M.A.; Sameer Araydah, W.; Jouda, B.; Al-Khawaldeh, M.A. Comparative Modeling Study of Pneumatic Artificial Muscle Using Neural Networks, ANFIS and Curve Fitting. In Proceedings of the 2023 9th International Conference on Automation, Robotics and Applications (ICARA), Abu Dhabi, United Arab Emirates, 10–12 February 2023; pp. 134–138. [Google Scholar] [CrossRef]
- Glowinski, S.; Krzyżyński, T. Modelling of the ejection process in a symmetrical flight. J. Theor. Appl. Mech. 2023, 51, 775–785. [Google Scholar]
- Maciejewski, I.; Krzyzynski, T.; Meyer, H. Modeling and vibration control of an active horizontal seat suspension with pneumatic muscles. J. Vib. Control 2018, 24, 5938–5950. [Google Scholar] [CrossRef]
- ISO 2631; Mechanical Vibration and Shock—Evaluation of Human Exposure to Whole Body Vibration. International Organization for Standardization: Geneva, Switzerland, 1997.
- Maciejewski, I.; Błażejewski, A.; Pecolt, S.; Królikowski, T. Multi-body Model Simulating Biodynamic Response of the Seated Human under Whole-Body Vibration. Procedia Comput. Sci. 2022, 207, 227–234. [Google Scholar] [CrossRef]
- Alabi, A.O.; Song, B.-G.; Bae, J.J.; Kang, N. Development of a 7-DOF Biodynamic Model for a Seated Human and a Hybrid Optimization Method for Estimating Human-Seat Interaction Parameters. Appl. Sci. 2023, 13, 10065. [Google Scholar] [CrossRef]
- Qiu, Y.; Griffin, M.J. Modelling the fore-and-aft apparent mass of the human body and the transmissibility of seat backrests. Veh. Syst. Dyn. 2011, 49, 703–722. [Google Scholar] [CrossRef]
- Glowinski, S.; Pecolt, S.; Błażejewski, A.; Sobieraj, M. Design of a Low-Cost Measurement Module for the Acquisition of Analogue Voltage Signals. Electronics 2023, 12, 610. [Google Scholar] [CrossRef]
- ISO 7096; Earth-Moving Machinery—Laboratory Evaluation of Operator Seat Vibration, Edition 4. ISO: Geneva, Switzerland, 2020.
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).