
Modeling and Experimental Validation of an Off-Road Truck’s (4 × 4) Lateral Dynamics Using a Multi-Body Simulation
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Experimental Measurement of Truck Characteristics
2.1. Determination of Truck Mass and Center of Gravity Coordinates
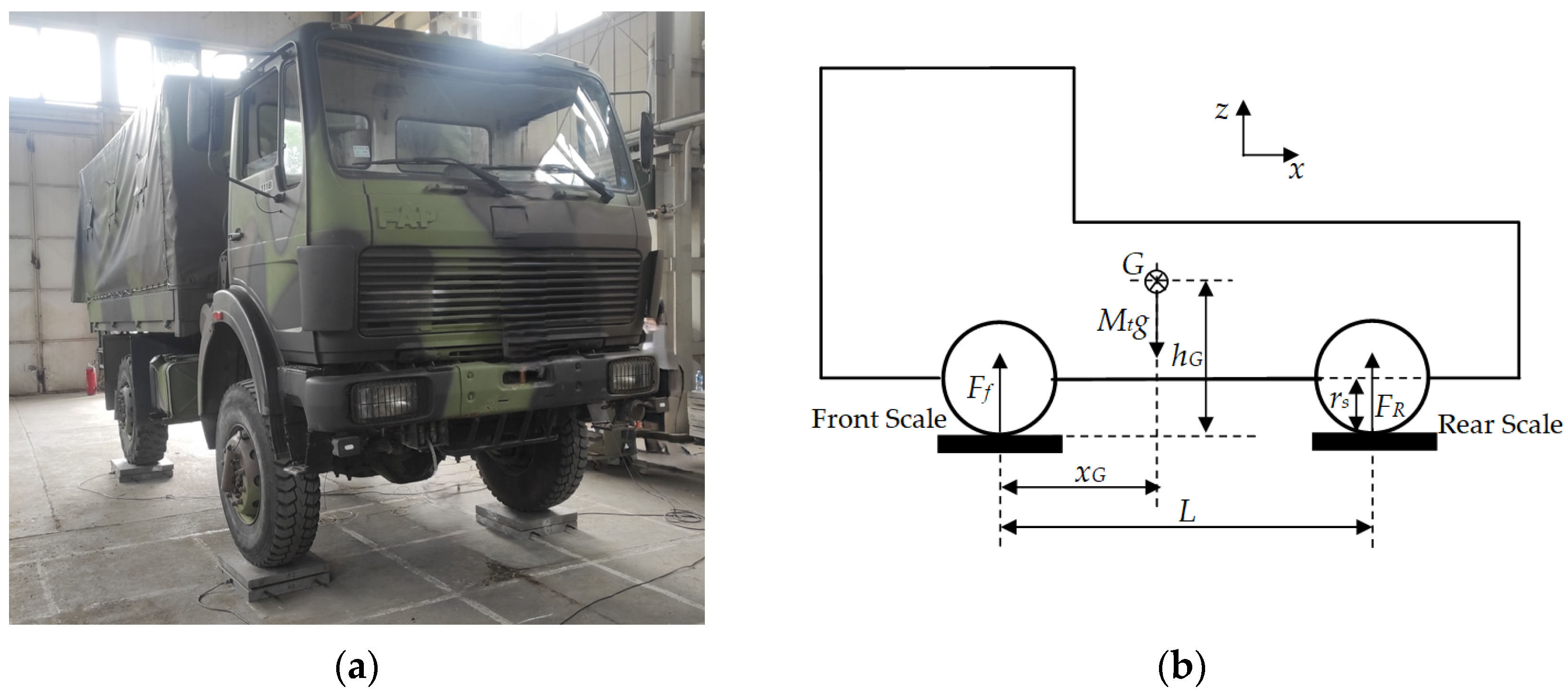
2.1.1. Determination of Vehicle Mass and the Coordinates of the Center of Gravity in the Horizontal Plane (xG, yG)
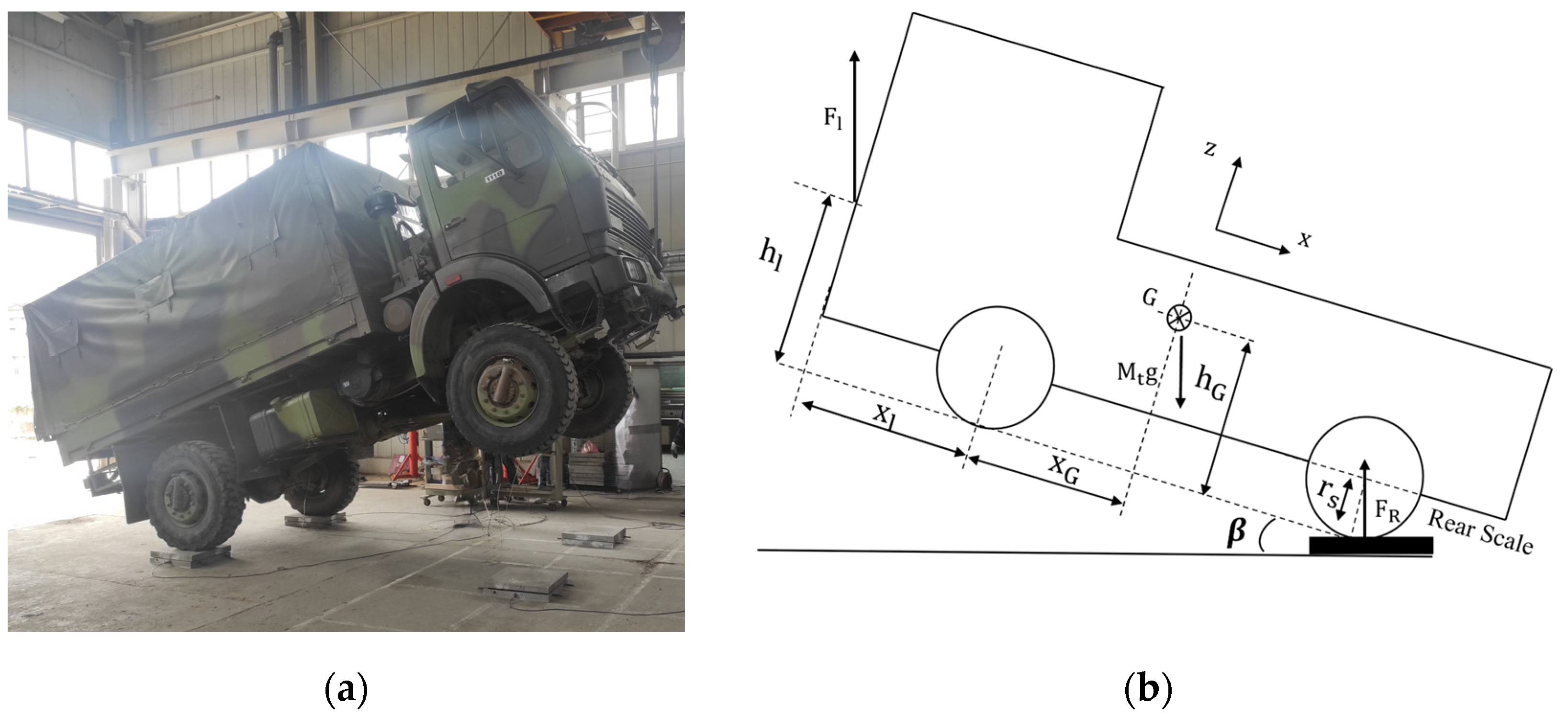
2.1.2. Determination of Vertical Coordinate of the Center of Gravity (zG)
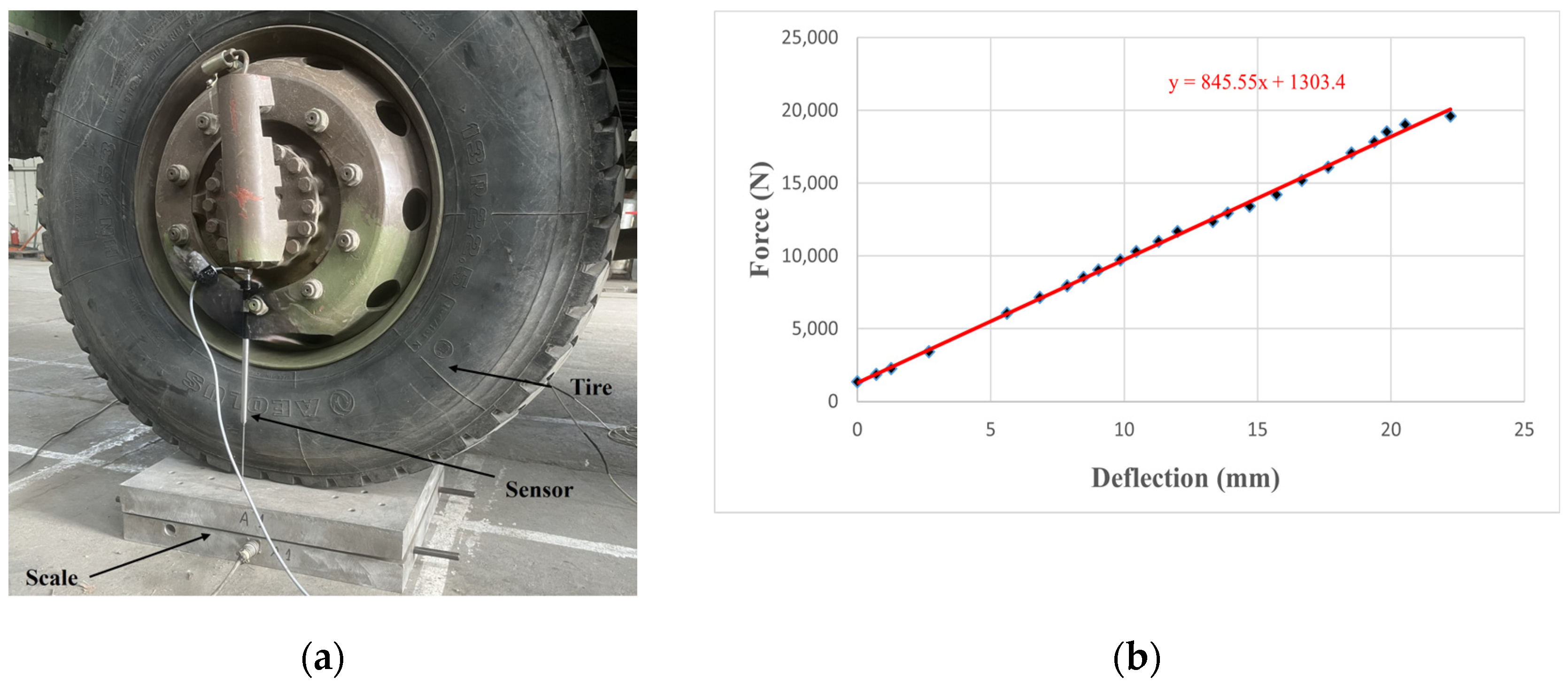
2.2. Measurement of Tire’s Vertical Stiffness
3. Modeling and Experimental Validation of Truck Suspension Systems
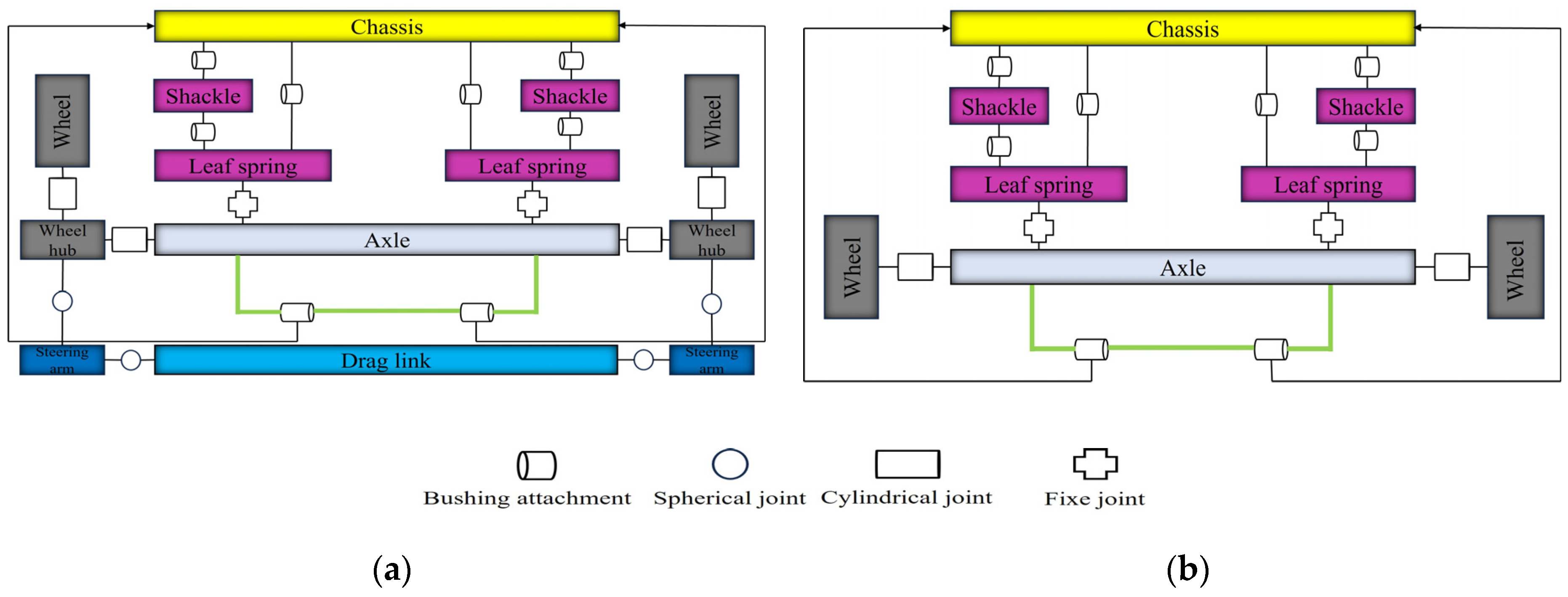
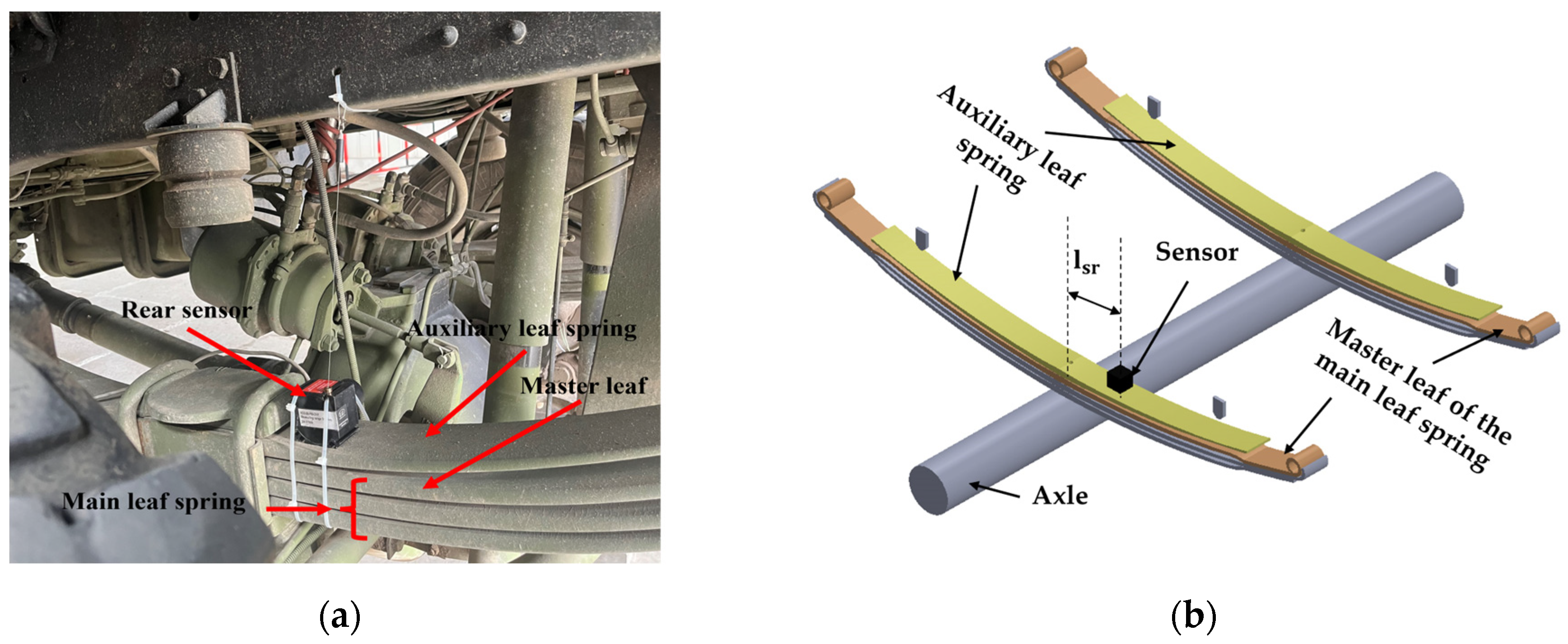
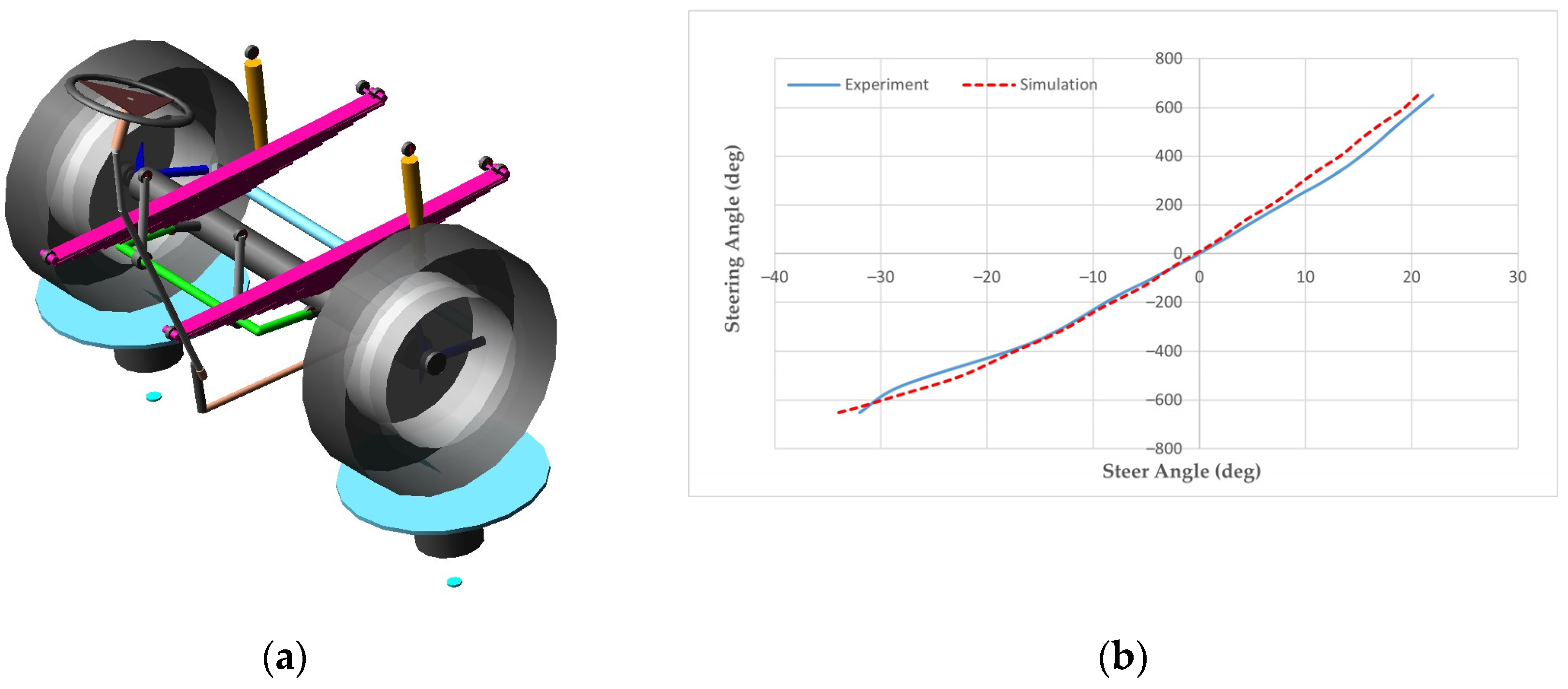
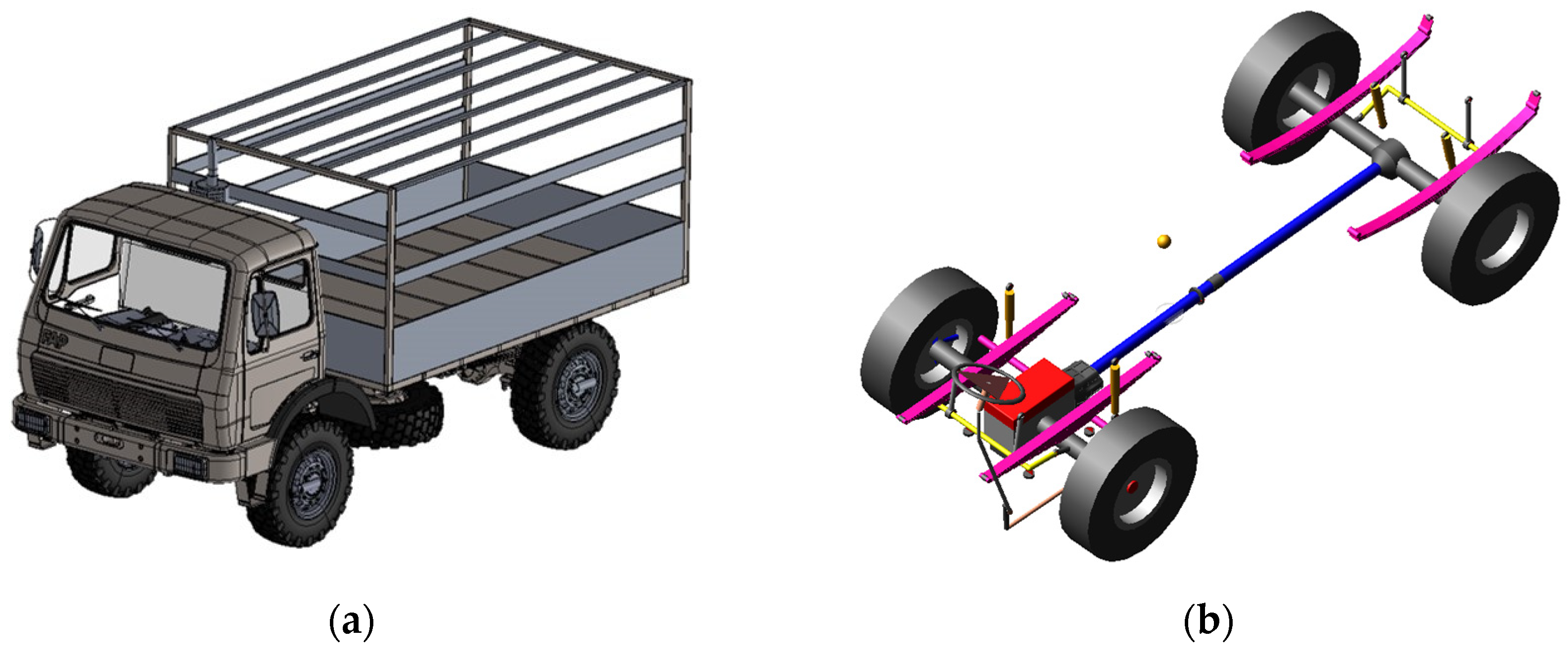
3.1. Description of Vehicle Suspension System
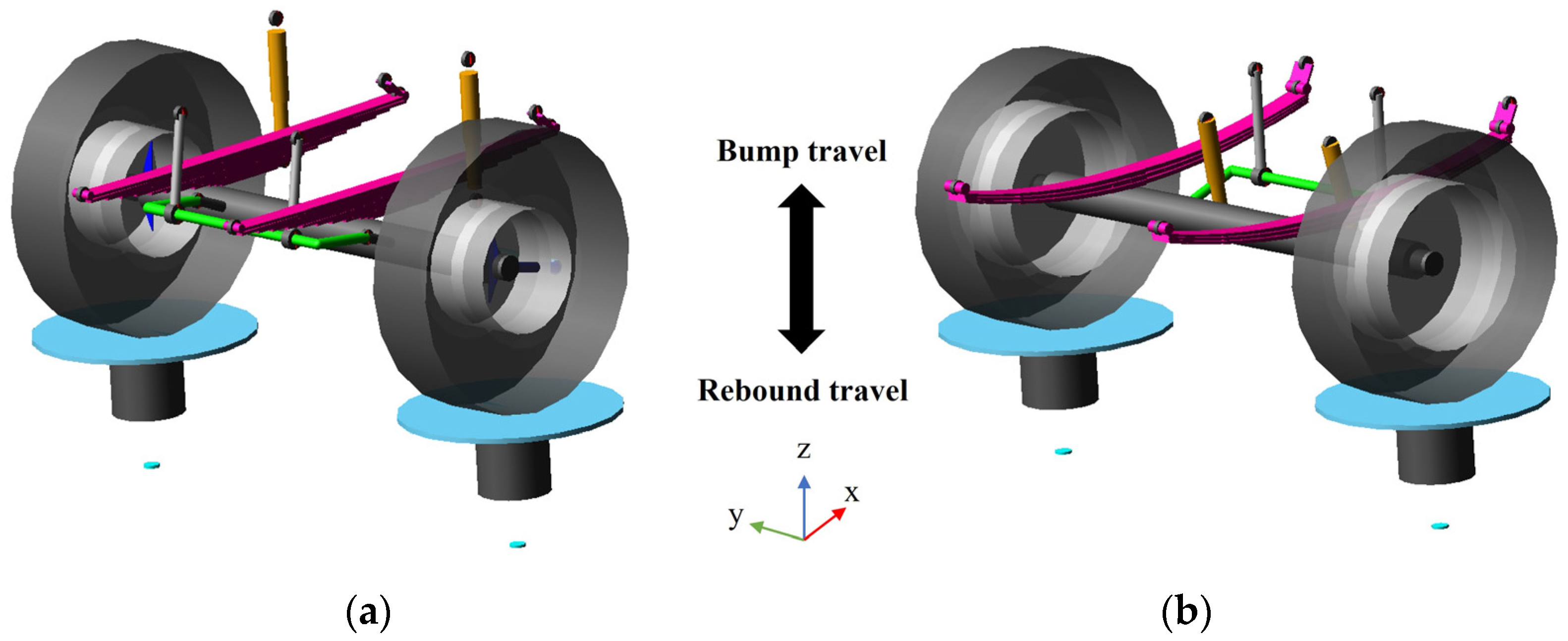
3.2. Modeling of the Truck Suspension System
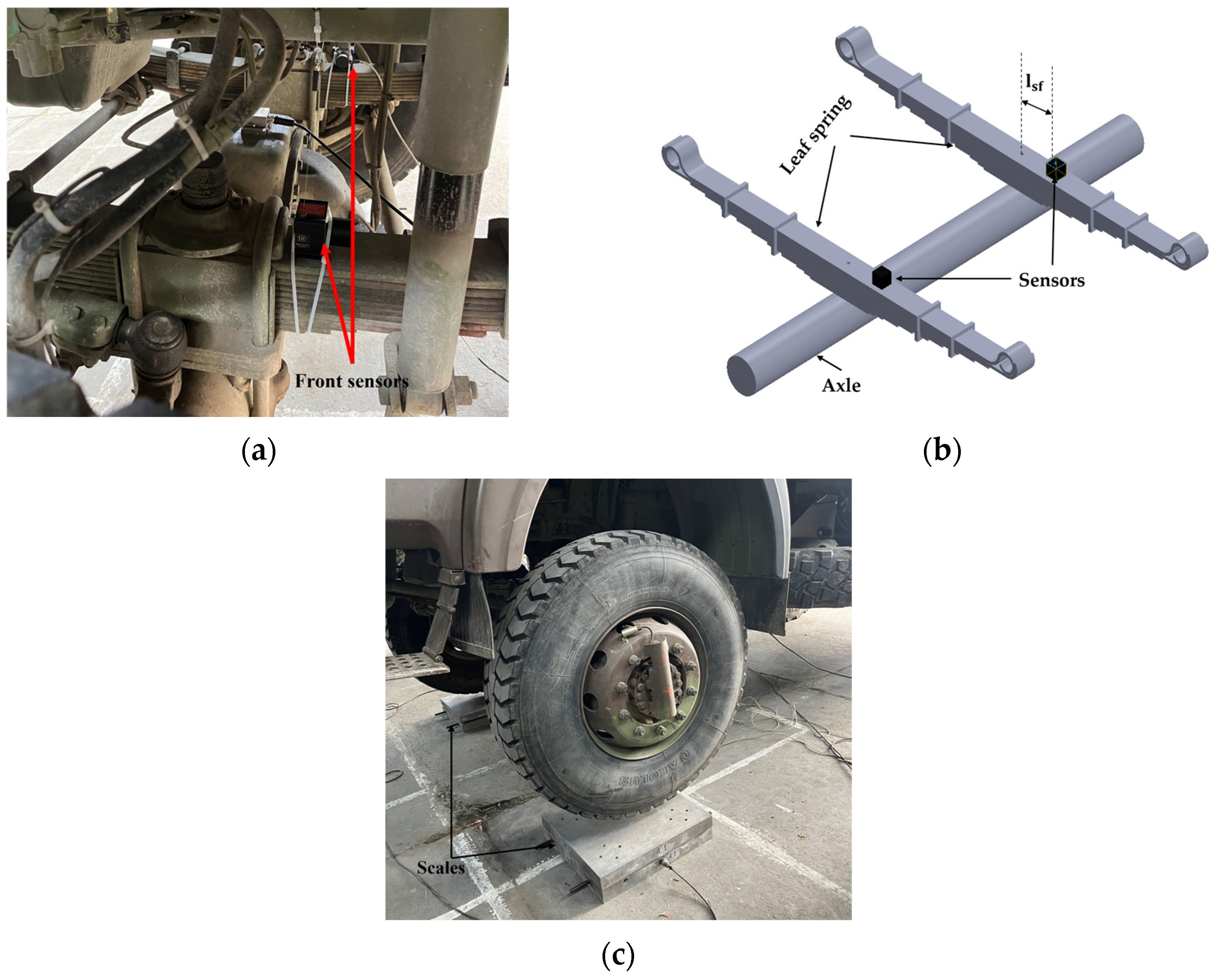
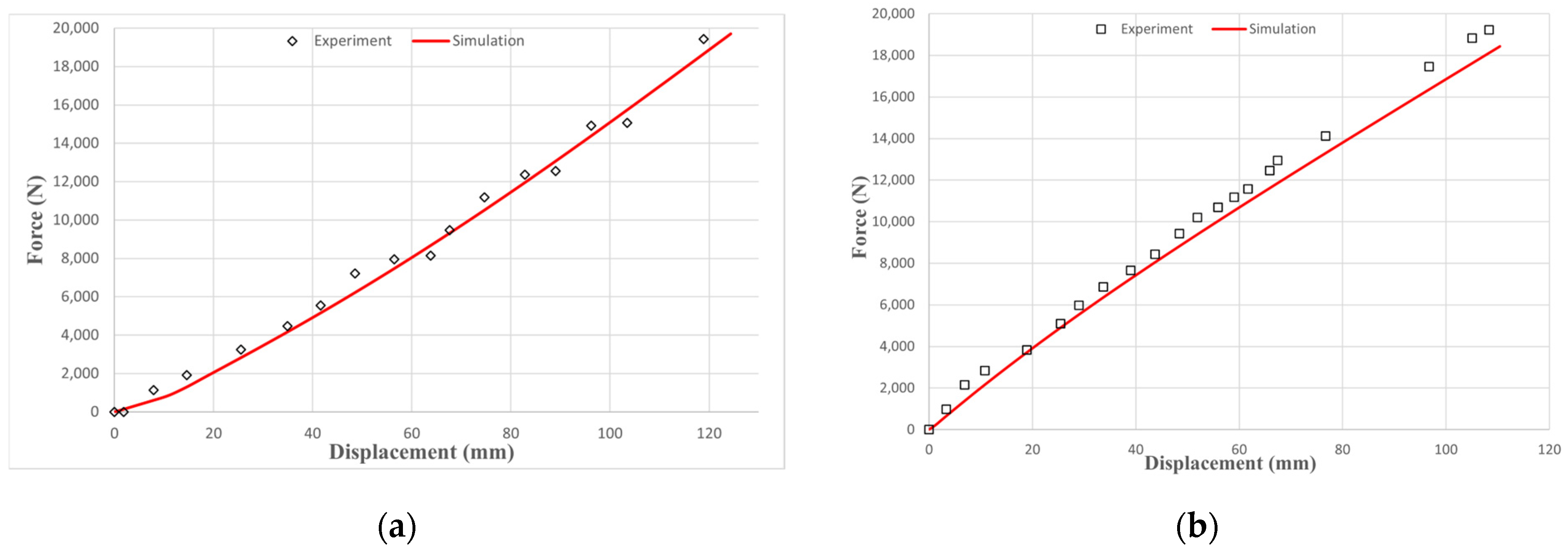
3.3. Experimental Testing of Truck Suspensions
4. Modeling and Experimental Validation Dynamics Characteristics of the Truck
4.1. Truck Modeling
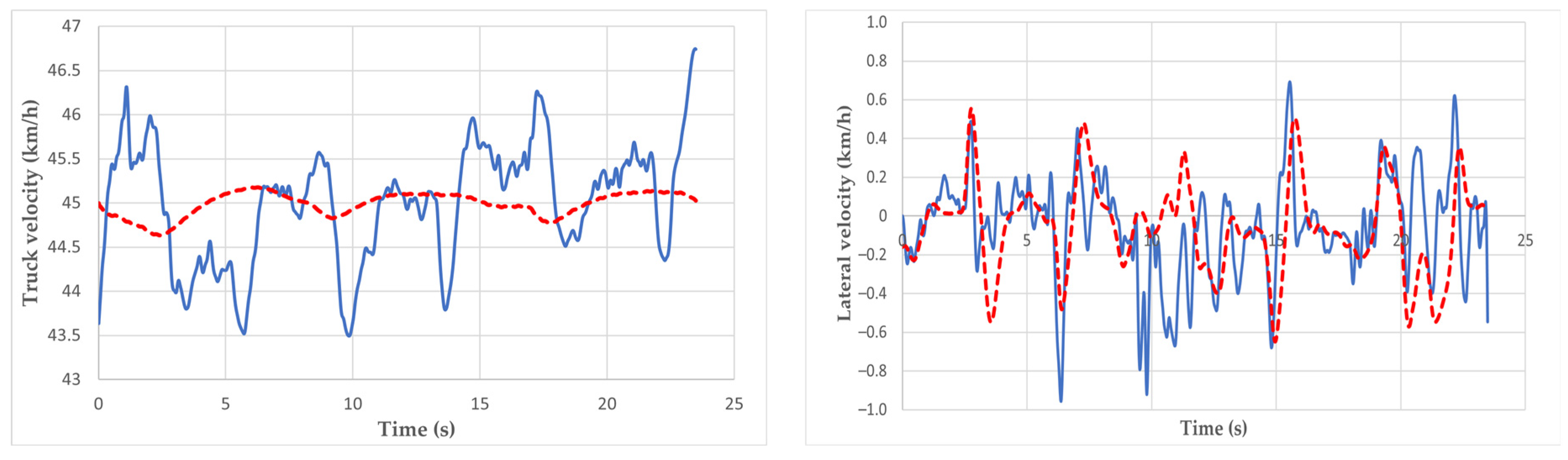
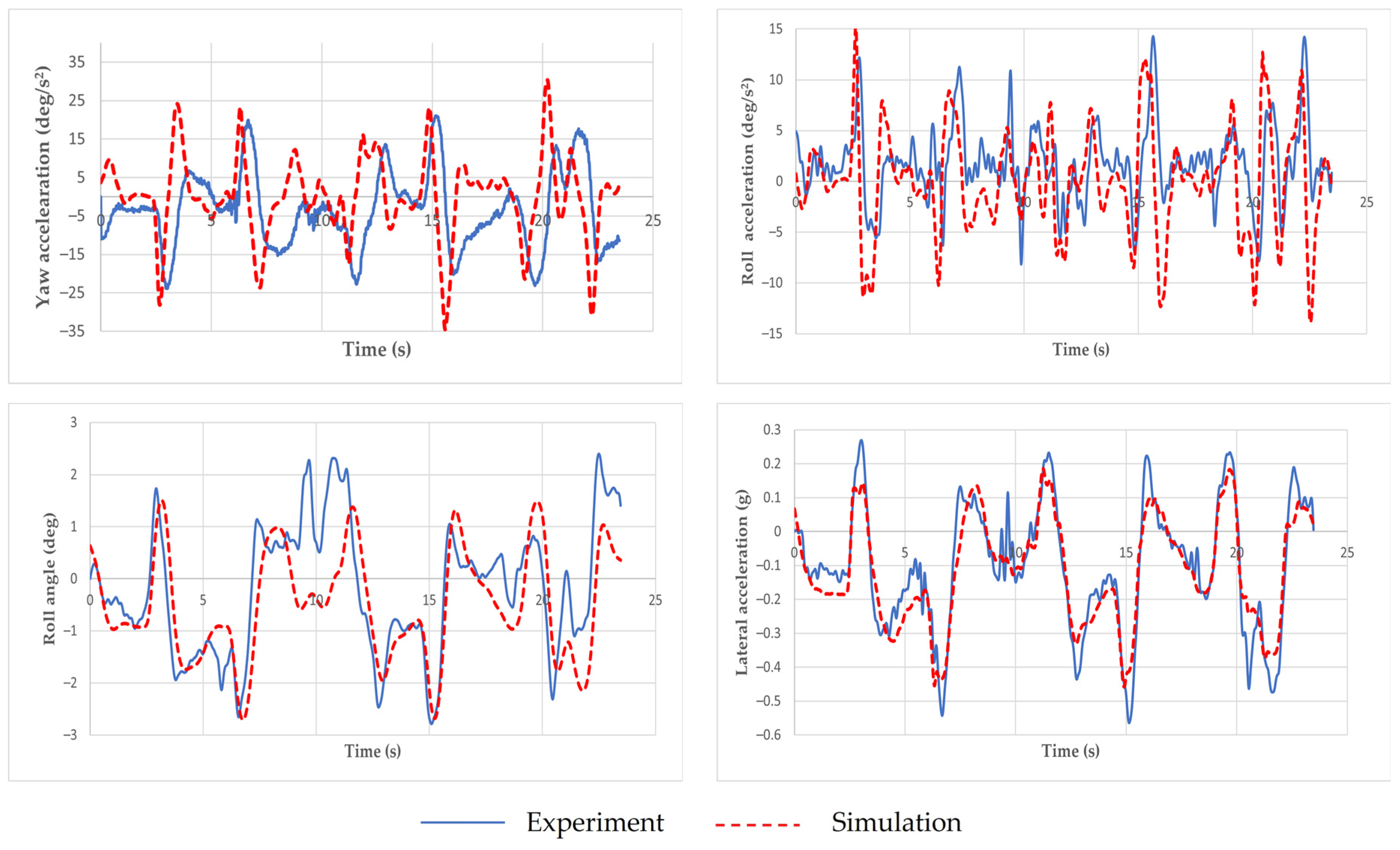
4.2. Dynamic Validation of the Truck Model
- A Potentiometer sensor is placed on the truck’s steering wheel to record the steering wheel rotation angle applied by the driver as a function of time during the maneuver.
- SST 810 dynamic inclinometer (Vigor Technology, Shanghai, China) is placed in the truck’s center of gravity and is used to measure the angle and acceleration.
- Kistler Correvit S-350 sensors (Winterthur, Switzerland) are used for the direct, slip-free measurement of a vehicle’s longitudinal and transverse dynamics, placed on the left side of the truck to measure the truck’s longitudinal and lateral velocities.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mitic, S.; Popovic, V.; Blagovic, I.; Grbovic, A. Verification of the Numerical Model of Optimized Bus Body Structure According to UN Regulation No. 66. Teh. Vjesn. 2023, 30, 87–92. [Google Scholar] [CrossRef]
- Korunović, N.; Fragassa, C.; Marinković, D.; Vitković, N.; Trajanović, M. Performance Evaluation of Cord Material Models Applied to Structural Analysis of Tires. Compos. Struct. 2019, 224, 111006. [Google Scholar] [CrossRef]
- Wang, H.; Nagayama, T. Response Spectrum Model of Vehicle Dynamic Load for the Prediction of Bridge Vibration Level Due to Single Vehicle-Passage. Eng. Struct. 2022, 260, 114180. [Google Scholar] [CrossRef]
- Damjanović, M.; Stević, Ž.; Stanimirović, D.; Tanackov, I.; Marinković, D. Impact of the number of vehicles on traffic safety: Multiphase modeling. FU Mech. Eng. 2022, 20, 177–197. [Google Scholar] [CrossRef]
- Khettou, N.; Trifkovic, D.; Muzdeka, S. Using Modelling and Simulation to Predict Dynamics of Converted Ground Vehicle. Def. Sci. J. 2016, 66, 509. [Google Scholar] [CrossRef]
- Hasagasioglu, S.; Kilicaslan, K.; Atabay, O.; Güney, A. Vehicle Dynamics Analysis of a Heavy-Duty Commercial Vehicle by Using Multibody Simulation Methods. Int. J. Adv. Manuf. Technol. 2012, 60, 825–839. [Google Scholar] [CrossRef]
- Jia, X.; Yin, Y.; Wang, W. Dynamic Modeling, Dynamic Characteristics, and Slight Self-Guidance Ability at High Speeds of Independently Rotating Wheelset for Railway Vehicles. Appl. Sci. 2024, 14, 1548. [Google Scholar] [CrossRef]
- Rajamani, R. Vehicle Dynamics and Control; Mechanical Engineering Series; Springer: Boston, MA, USA, 2012; ISBN 978-1-4614-1432-2. [Google Scholar]
- Precup, R.-E.; Preitl, S.; Bojan-Dragos, C.-A.; Hedrea, E.-L.; Roman, R.-C.; Petriu, E.M. A low-cost approach to data-driven fuzzy control of servo systems. FU Mech. Eng. 2022, 20, 021. [Google Scholar] [CrossRef]
- Lai, F.; Wang, X. Enhancing Autonomous Vehicle Stability through Pre-Emptive Braking Control for Emergency Collision Avoidance. Appl. Sci. 2023, 13, 13219. [Google Scholar] [CrossRef]
- Longoni, F.; Hägglund, A.; Ripamonti, F.; Pennacchi, P.L.M. Powertrain Modal Analysis for Defining the Requirements for a Vehicle Drivability Study. Machines 2022, 10, 1120. [Google Scholar] [CrossRef]
- Moon, C. Design and Implementation of Hardware-in-the-Loop Simulation Environment Using System Identification Method for Independent Rear Wheel Steering System. Machines 2023, 11, 996. [Google Scholar] [CrossRef]
- Llopis-Albert, C.; Rubio, F.; Zeng, S. Multiobjective Optimization Framework for Designing a Vehicle Suspension System. A Comparison of Optimization Algorithms. Adv. Eng. Softw. 2023, 176, 103375. [Google Scholar] [CrossRef]
- Nguyen, D.N.; Nguyen, T.A. The Dynamic Model and Control Algorithm for the Active Suspension System. Math. Probl. Eng. 2023, 2023, 2889435. [Google Scholar] [CrossRef]
- Dridi, I.; Hamza, A.; Ben Yahia, N. Control of an Active Suspension System Based on Long Short-Term Memory (LSTM) Learning. Adv. Mech. Eng. 2023, 15, 168781322311567. [Google Scholar] [CrossRef]
- Gudarzi, M. Reliable robust controller for half-car active suspension systems based on human-body dynamics. FU Mech. Eng. 2016, 14, 121. [Google Scholar] [CrossRef]
- Bhatt, C.D.; Nadarajan, M.; Balaji, R.; Rohith, I.; Selokar, A. Leaf Spring Model for Heavy Load Vehicle Using Solid Works and ANSYS Analysis. Mater. Today Proc. 2020, 33, 4764–4770. [Google Scholar] [CrossRef]
- Zhang, J.; Long, F.; Lin, J.; Zhu, X.; Dai, H. Modeling and Simulation of the Equivalent Vertical Stiffness of Leaf Spring Suspensions. Adv. Mech. Eng. 2023, 15, 16878132231200307. [Google Scholar] [CrossRef]
- Tinsley, B. Integration of Geometry and Analysis for the Study of Leaf Springs in Multibody Applications. Ph.D. Thesis, University of Illinois, Chicago, IL, USA, 2019. [Google Scholar]
- Fancher, P.S.; Ervin, R.D.; Macadam, C.C.; Winkler, C.B. Measurement and Representation of the Mechanical Properties of Truck Leaf Springs; SAE International: Warrendale, PA, USA, 1980; p. 800905. [Google Scholar]
- Timošenko, S.P. Strength of Materials. 1: Elementary Theory and Problems, 3rd ed.; Van Nostrand: New York, NY, USA, 1955; ISBN 978-0-442-08539-1. [Google Scholar]
- Ghosal, S.; Prasanta, K.S.; Kash, N.S. Nonlinear Dynamics of Thick Leaf Spring Using Timoshenko Beam Functions; American Society of Mechanical Engineers (ASME): Lisbon, Portugal, 2013. [Google Scholar]
- Castigliano, A. Interno Ai Sistem Elastici; Polytechnic of Turin: Turin, Italy, 1873. [Google Scholar]
- Zhao, L.; Zhang, Y.; Yu, Y.; Zhou, C.; Li, X.; Li, H. Truck Handling Stability Simulation and Comparison of Taper-Leaf and Multi-Leaf Spring Suspensions with the Same Vertical Stiffness. Appl. Sci. 2020, 10, 1293. [Google Scholar] [CrossRef]
- Marinkovic, D.; Zehn, M. Survey of finite element method-based real-time simulations. Appl. Sci. 2019, 9, 2775. [Google Scholar] [CrossRef]
- Bt, D.M.; Sp, H.K. Design and Analysis of Steel Leaf Spring and Composite Leaf Spring Using Finite Element Method Approach. IJRASET 2023, 11, 791–798. [Google Scholar] [CrossRef]
- Kat, C.-J. Validated Leaf Spring Suspension Models. Ph.D. Thesis, University of Pretoria, Pretoria, South Africa, 2012. [Google Scholar]
- Kadziela, B.; Manka, M.; Uhl, T.; Toso, A. Validation and Optimization of the Leaf Spring Multibody Numerical Model. Arch. Appl. Mech. 2015, 85, 1899–1914. [Google Scholar] [CrossRef]
- Jayakumar, P.; Alanoly, J.; Johnson, R. Three-Link Leaf-Spring Model for Road Loads; SAE International: Warrendale, PA, USA, 2005. [Google Scholar]
- Liu, X.; Chen, W.; Chen, Y.; Zhao, J. Simulation Modeling on Dynamic Stiffness of Leaf Spring Based on Three-Link Model. SAE Int. J. Commer. Veh. 2017, 10, 519–523. [Google Scholar] [CrossRef]
- Rill, G.; Bauer, F.; Topcagic, E. Performance of Leaf Spring Suspended Axles in Model Approaches of Different Complexities. Veh. Syst. Dyn. 2022, 60, 2871–2889. [Google Scholar] [CrossRef]
- Shi, W.; Liu, C.; Chen, Z.; He, W.; Zu, Q. Efficient Method for Calculating the Composite Stiffness of Parabolic Leaf Springs with Variable Stiffness for Vehicle Rear Suspension. Math. Probl. Eng. 2016, 2016, 5169018. [Google Scholar] [CrossRef]
- Gomes, V.M.G.; De Jesus, A.M.P.; Figueiredo, M.; Correia, J.A.F.O.; Calcada, R. Full-Scale Experiment for Assessing Static Structural and Damping Response of UIC Parabolic Leaf Springs; Civil-Comp Press: Montpellier, France; pp. 1–8.
- Prado, M.; Cunha, R.H.; Neto, Á.C.; Costa, A.; Mancosu, F.; Savi, C.; D’Elboux, J.E. Bus Handling Analysis and Experimental Validation Using the Multibody System Technique; SAE International: Warrendale, PA, USA, 2001. [Google Scholar]
- Nurzaki, I.; Saifizul, A.; Ramli, R. Experimental Validation of Vehicle Dynamic Characteristics of a Virtual Heavy Vehicle Model. JMechE 2017, 4, 131–143. [Google Scholar]
- Salaani, K.; Rao, S.J.; Howe, J.G.; Elsasser, D.; Schnelle, S.C. An Applied Review of Simulation Validation Approaches on a Vehicle Dynamics Model.; Department of Transportation, National Highway Traffic Safety Administration: Washington, DC, USA, 2021. [Google Scholar]
- Alan Neville, G.; Joseph, D.W. Pneumatic Tire; Mechanical Engineering Faculty Research: Akron, OH, USA, 2006. [Google Scholar]
- Pacejka, H.B. Tyre and Vehicle Dynamics; Butterworth-Heinemann: Oxford, UK, 2002; ISBN 978-0-7506-5141-7. [Google Scholar]
- Yang, S.; Lu, Y.; Li, S. An Overview on Vehicle Dynamics. Int. J. Dynam. Control 2013, 1, 385–395. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scales Position | Front Left | Front Right | Rear Left | Rear Right | Vehicle Mass | Mass Average | |
|---|---|---|---|---|---|---|---|
| Mass value (kg) | T1 | 2120 | 2160 | 1360 | 1530 | 7170 | 7205 |
| T2 | 2170 | 2210 | 1340 | 1520 | 7240 | ||
| β | 6°10′ | 7°20′ | 9° | 11°30′ | 14°10′ | 16°30′ | 18°30′ | |
|---|---|---|---|---|---|---|---|---|
| Mass Value (kg) | Left | 1970 | 1980 | 1980 | 1990 | 2010 | 2010 | 2020 |
| Right | 2130 | 2130 | 2140 | 2150 | 2160 | 2160 | 2170 |
| Truck Mass Mt (kg) | Wheelbase L (mm) | Width l (mm) | The Center of Mass Coordinates (xG, yG, zG) (mm) |
|---|---|---|---|
| 7205 | 3600 | 2051.5 | (1436.57, 1056.35, 1089) |
| Parameters | The Correspondent Value |
|---|---|
| Tire inflation pressure P (kPa) | 6.7 × 102 |
| Nominal section Width SN (mm) | 13 × 25.4 = 330.2 |
| Section height H (mm) | 290 |
| Aspect ratio AR (%) | 87 |
| Rim diameter DR (mm) | 22.5 × 25.4 = 571.5 |
| Measured Value | Analytical Value | Error % | |
|---|---|---|---|
| Tire Stiffness (N/mm) | 845.55 | 934.89 | 9.56 |
| Sensor Name | Measured Entity | Position on Truck |
|---|---|---|
| Potentiometer | Steering wheel angle | Steering wheel |
| SST 810 dynamic inclinometer | Roll angle, lateral acceleration roll acceleration, and yaw acceleration | Truck center of gravity |
| Kistler S-350 non-contact optical sensor | Truck velocity, lateral velocity | The left side of the truck |
| Parameter | ay (g) | vy (km/h) | θx (deg) | αz (deg/s2) | αx (deg/s2) |
|---|---|---|---|---|---|
| Experiment | 0.18 | 0.22 | 1.15 | 9.21 | 3.87 |
| Simulation | 0.17 | 0.21 | 1.08 | 8.91 | 4.23 |
| Deviation (%) | 7.74 | 5.40 | 6.51 | 3.33 | 6.86 |
| Parameter | ay (g) | vy (km/h) | θx (deg) | αz (deg/s2) | αx (deg/s2) |
|---|---|---|---|---|---|
| Experiment | 0.21 | 0.26 | 1.26 | 10.43 | 4.90 |
| Simulation | 0.20 | 0.24 | 1.15 | 10.55 | 5.18 |
| Deviation (%) | 7.59 | 8.65 | 8.37 | 1.09 | 5.44 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Benmeddah, A.; Jovanović, V.; Perić, S.; Drakulić, M.; Đurić, A.; Marinković, D. Modeling and Experimental Validation of an Off-Road Truck’s (4 × 4) Lateral Dynamics Using a Multi-Body Simulation. Appl. Sci. 2024, 14, 6479. https://doi.org/10.3390/app14156479
Benmeddah A, Jovanović V, Perić S, Drakulić M, Đurić A, Marinković D. Modeling and Experimental Validation of an Off-Road Truck’s (4 × 4) Lateral Dynamics Using a Multi-Body Simulation. Applied Sciences. 2024; 14(15):6479. https://doi.org/10.3390/app14156479
Chicago/Turabian StyleBenmeddah, Abdeselem, Vesna Jovanović, Sreten Perić, Momir Drakulić, Aleksandar Đurić, and Dragan Marinković. 2024. "Modeling and Experimental Validation of an Off-Road Truck’s (4 × 4) Lateral Dynamics Using a Multi-Body Simulation" Applied Sciences 14, no. 15: 6479. https://doi.org/10.3390/app14156479