
High-Precision Pointing and Tracking System Design for Near-Space Balloon-Based Optical Observation


Abstract
:1. Introduction
2. Methods and Analysis
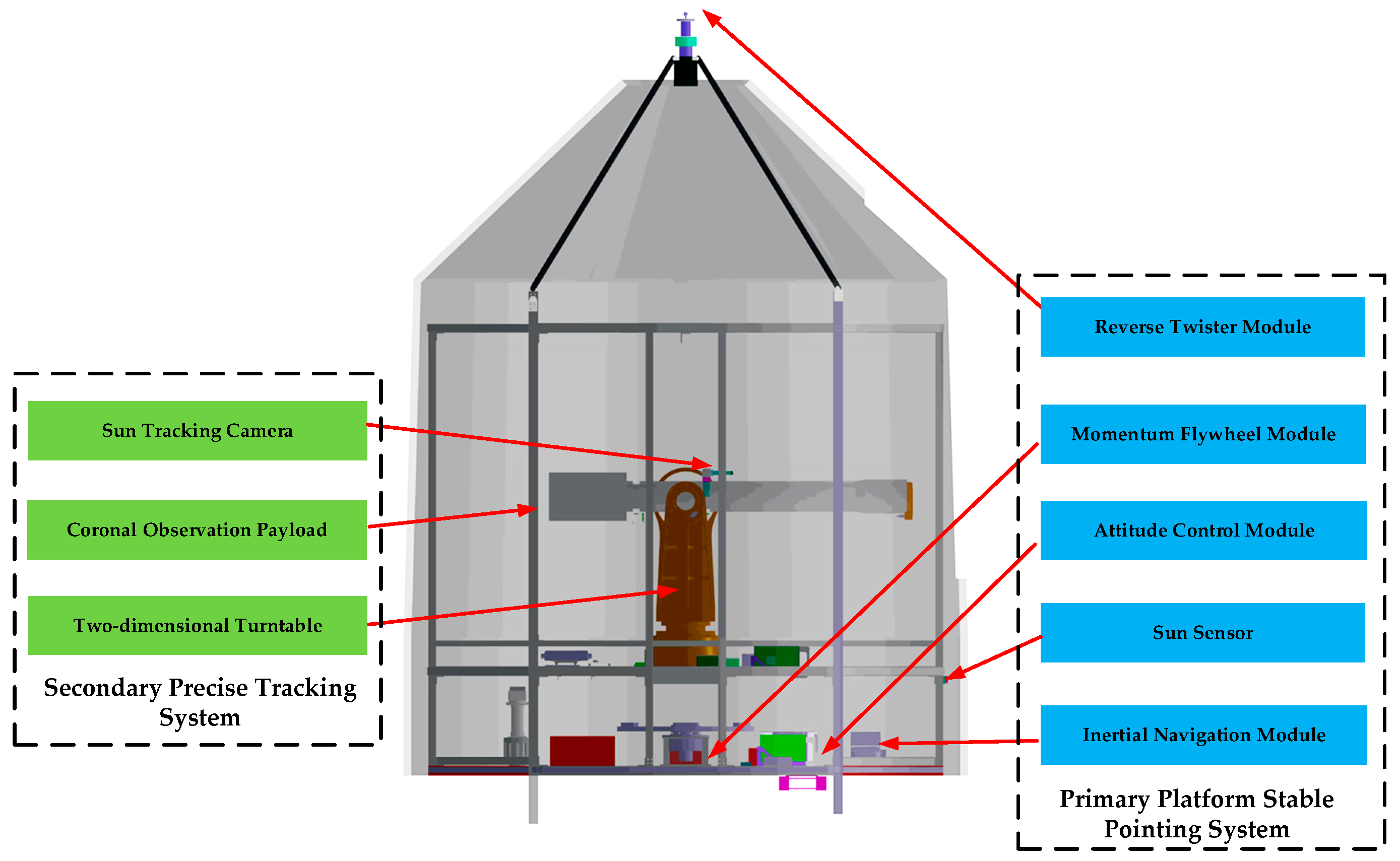
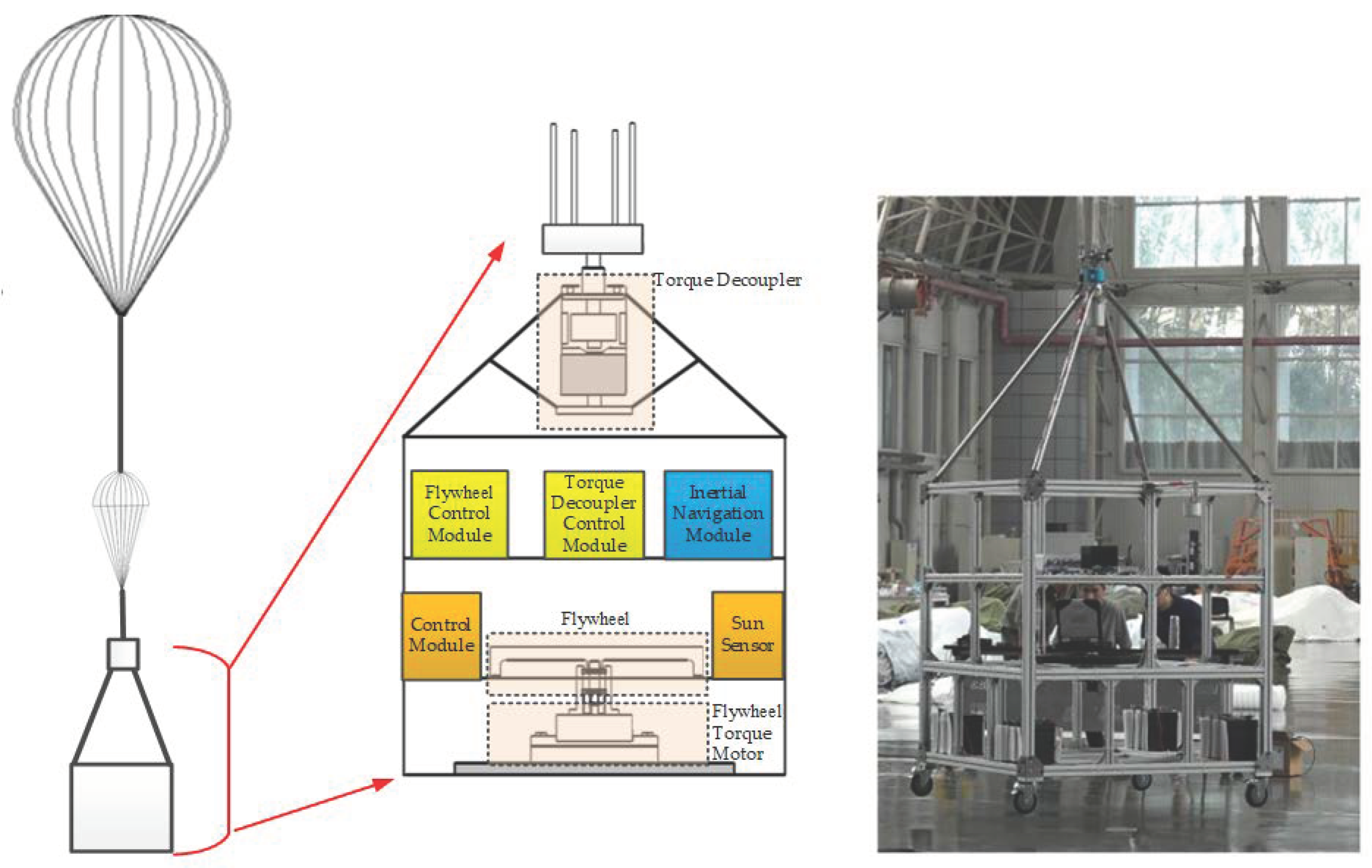
2.1. System Overview
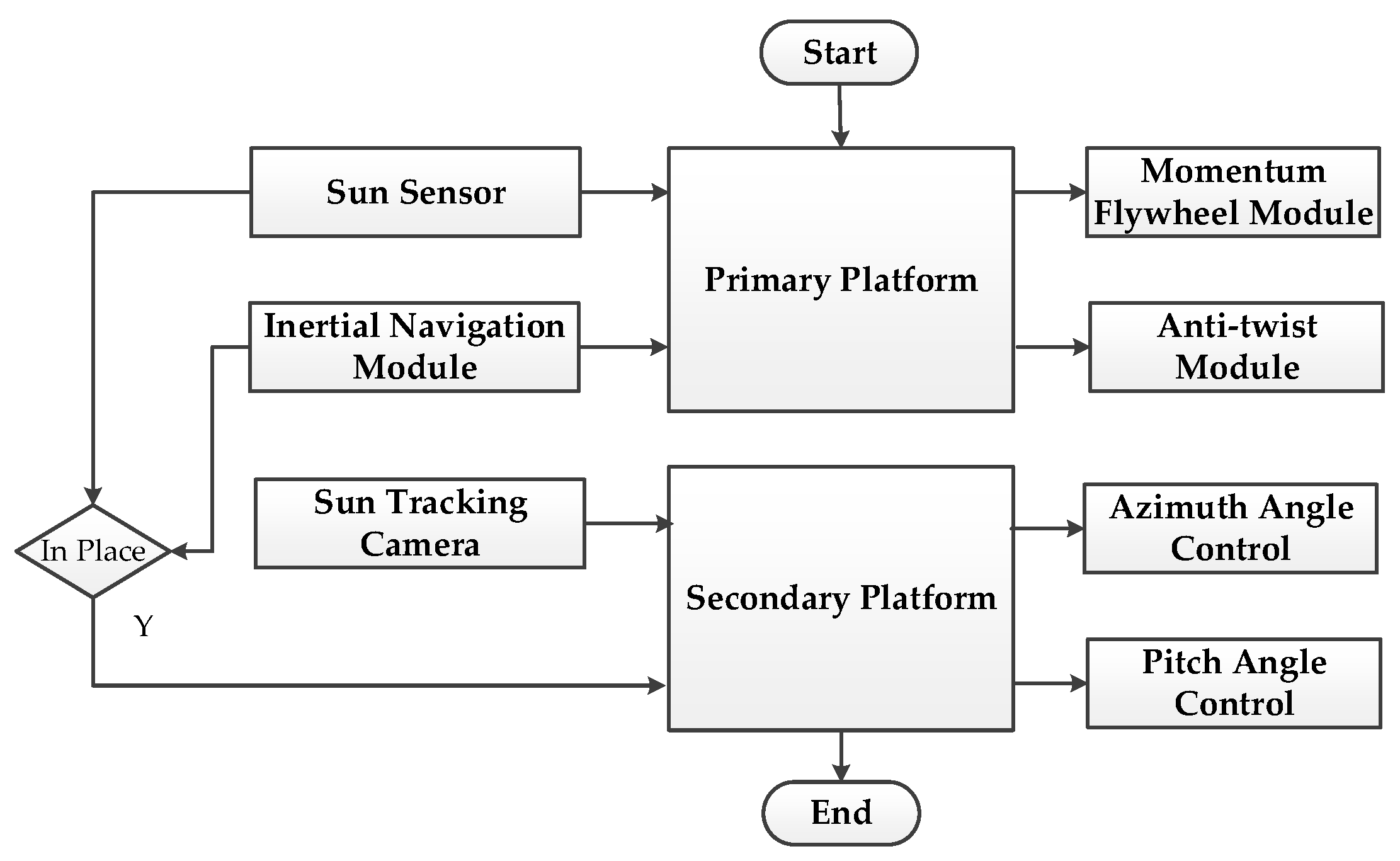
2.2. Primary Platform Stable Pointing System Design
2.3. Secondary Precise Tracking System
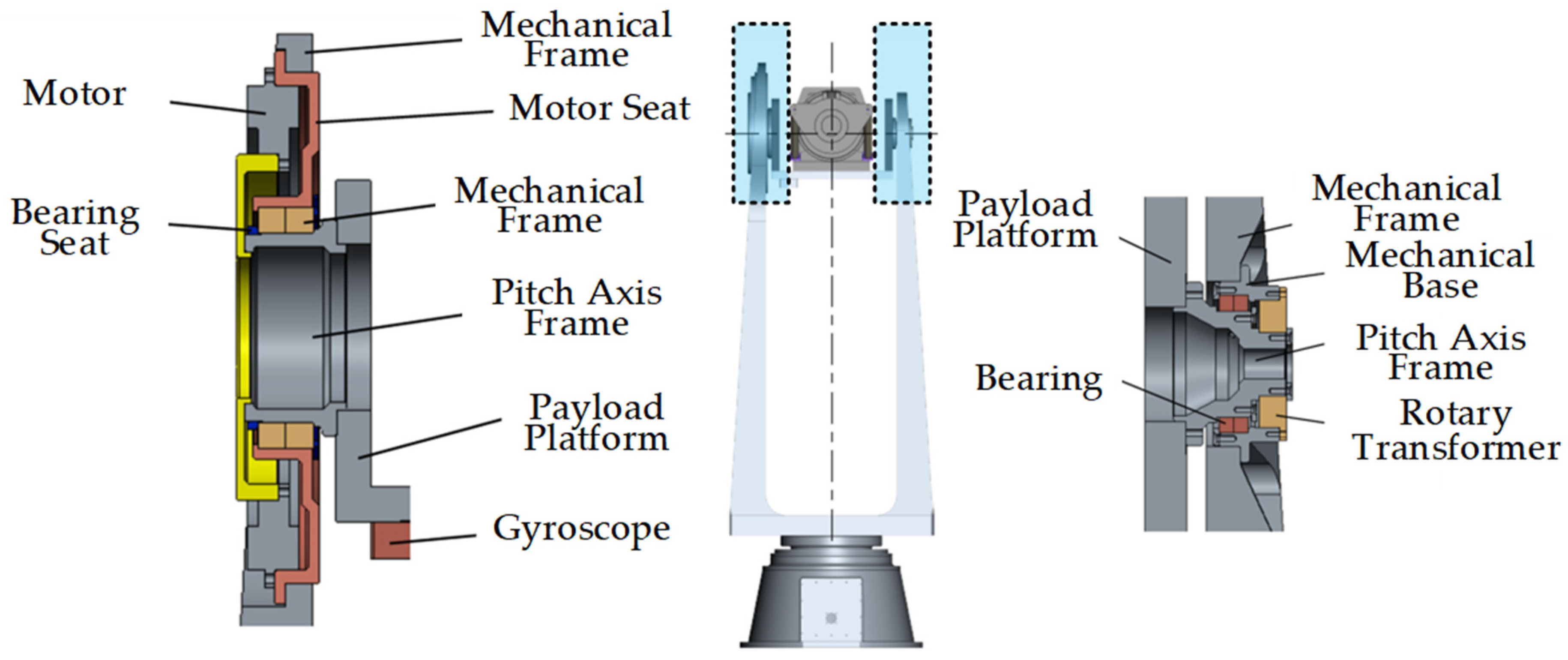
2.3.1. Mechanical Design
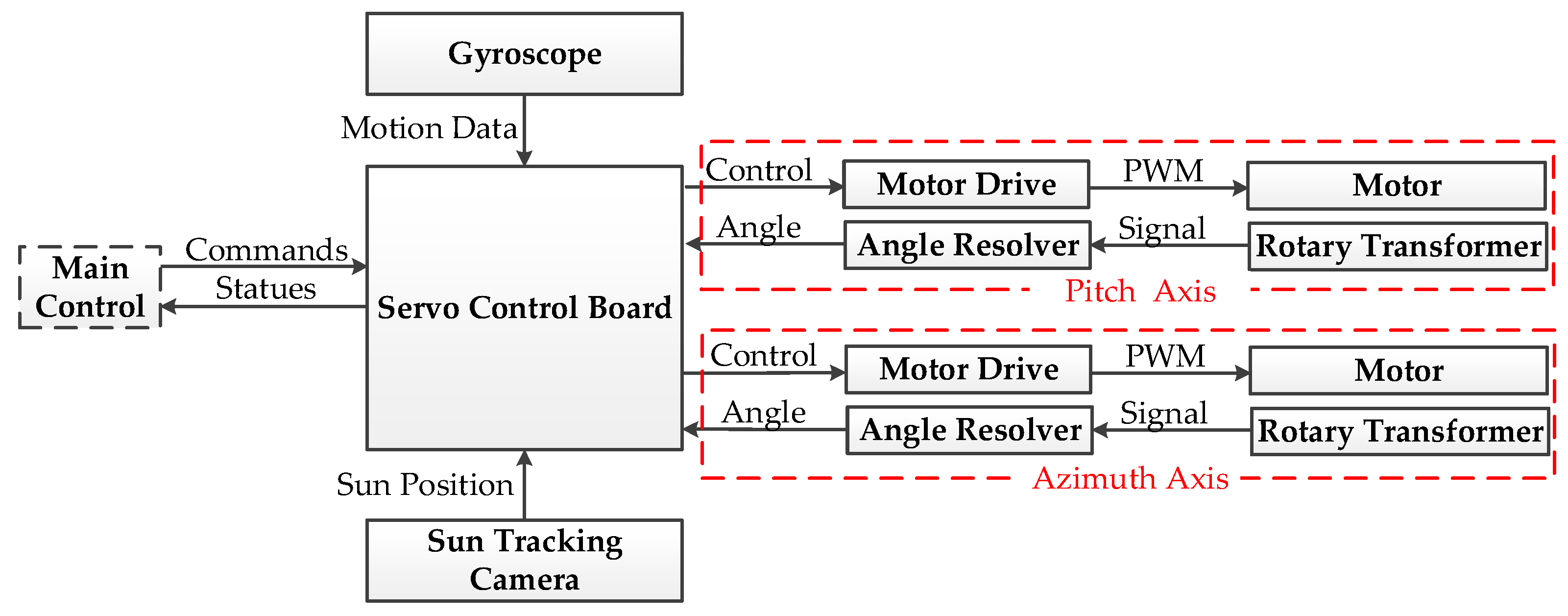
2.3.2. Stable Pointing and Tracking Design
2.3.3. Accuracy Analysis
3. Results
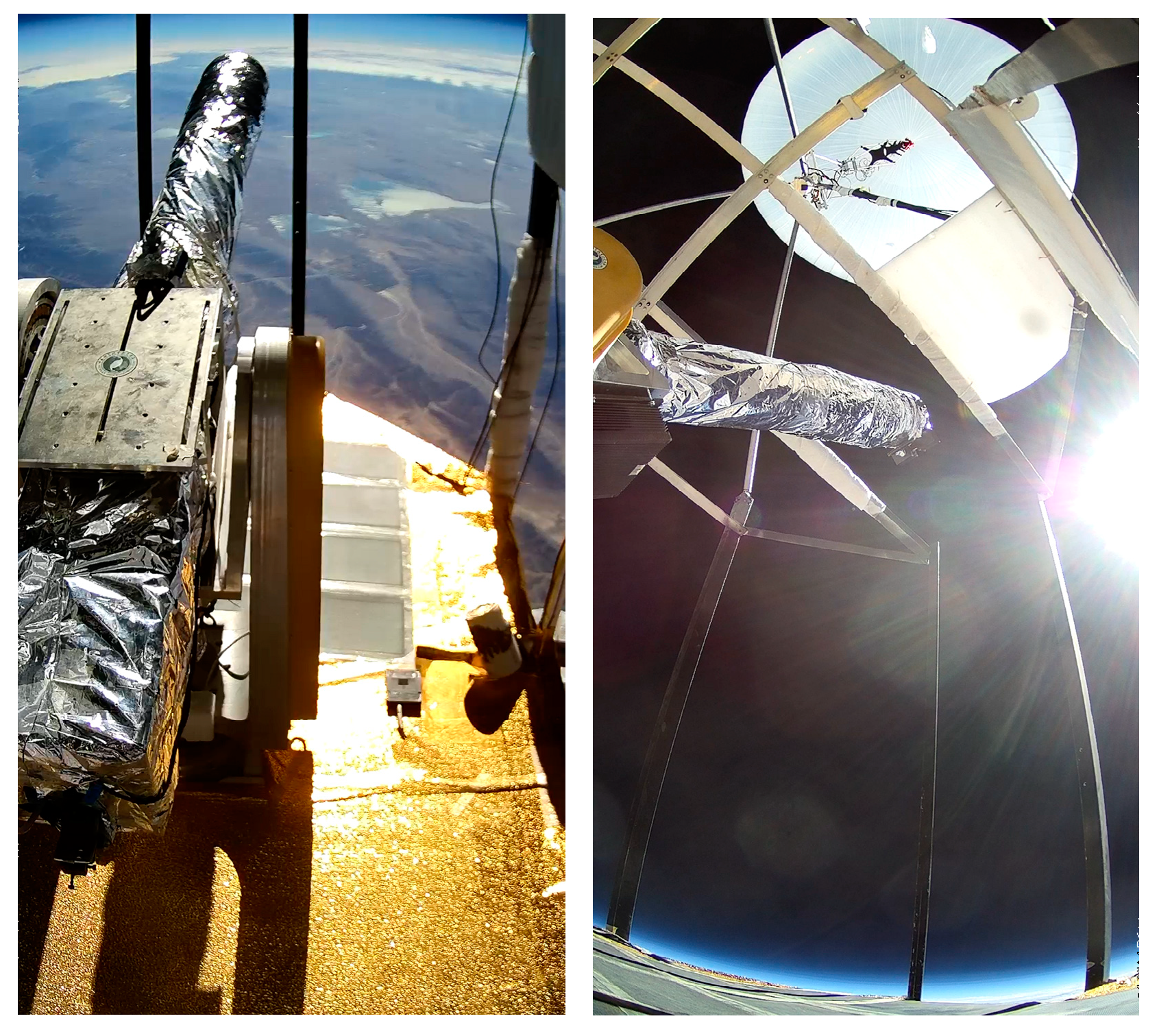
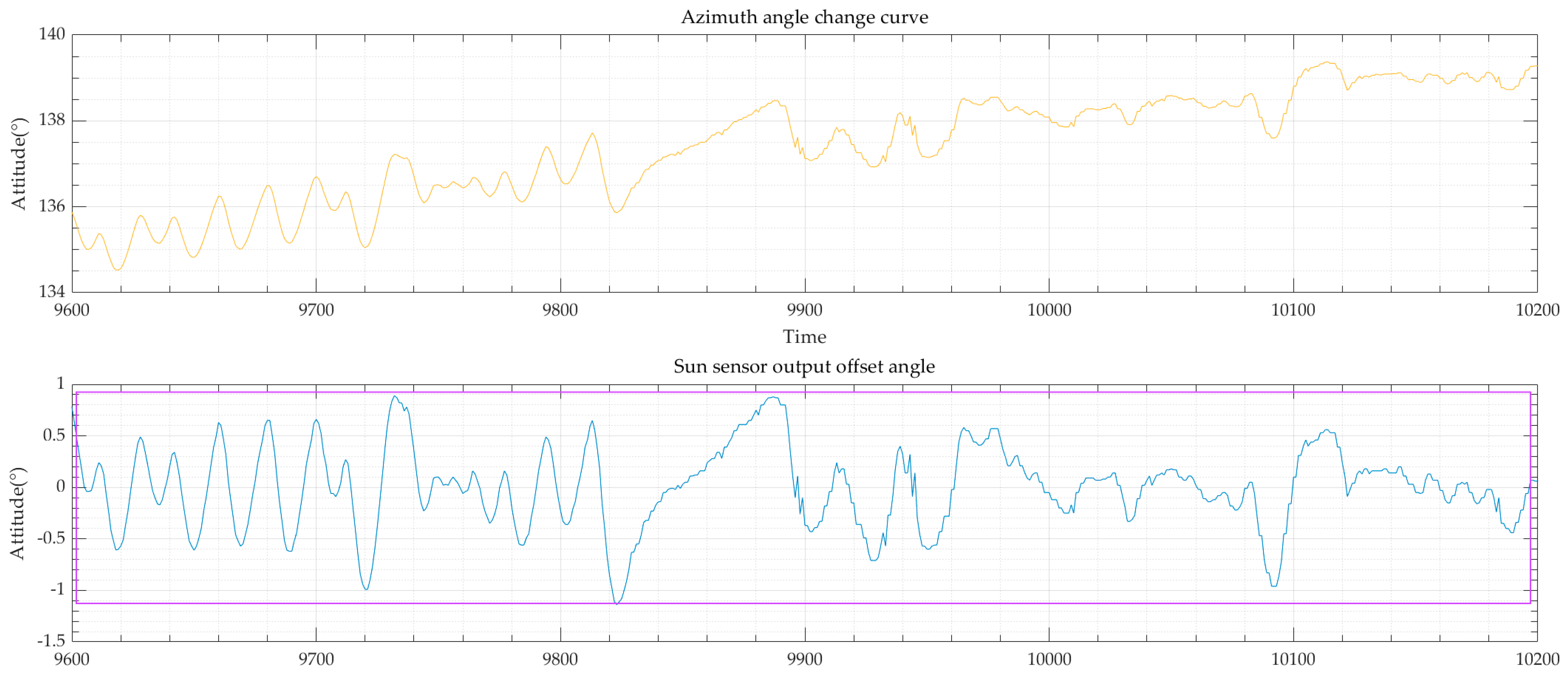
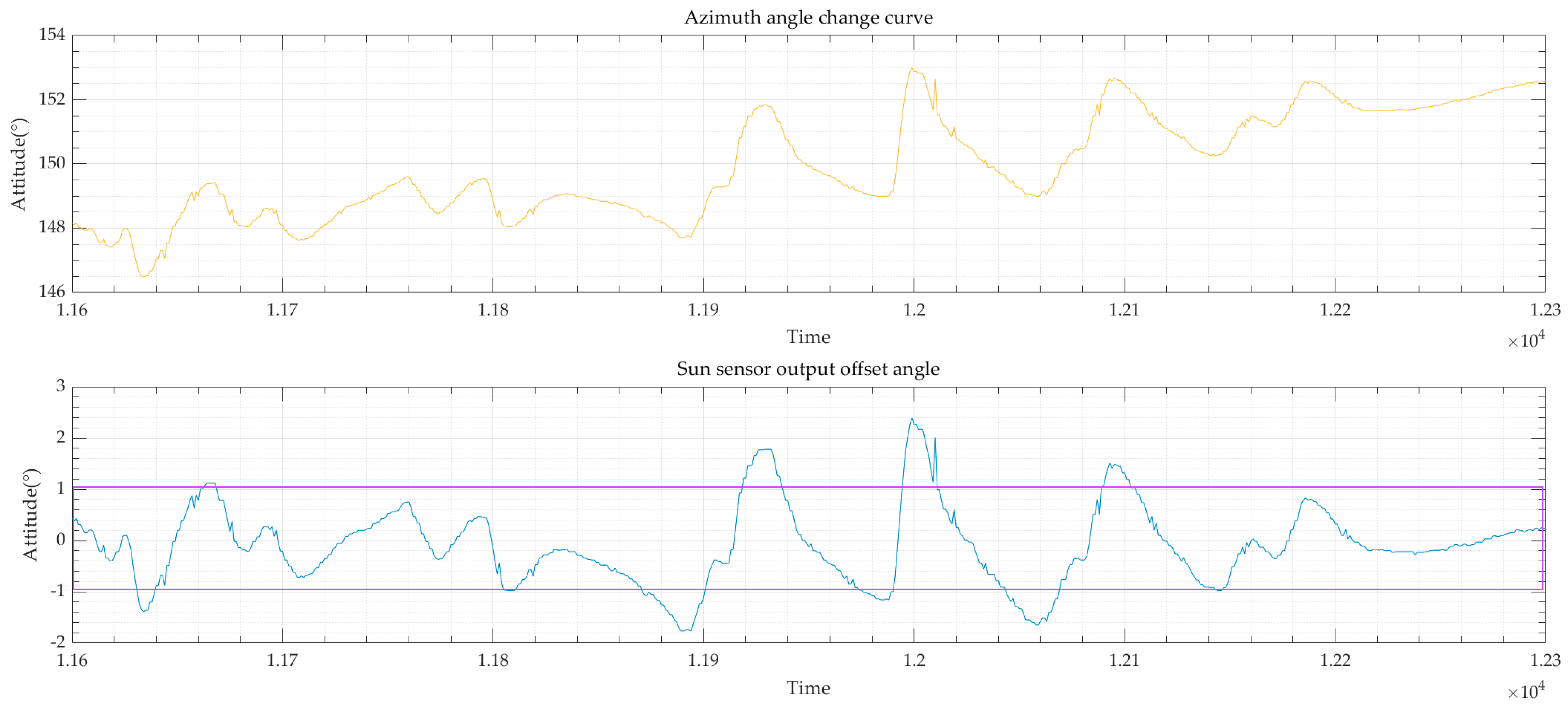
3.1. Flight Experiment Result
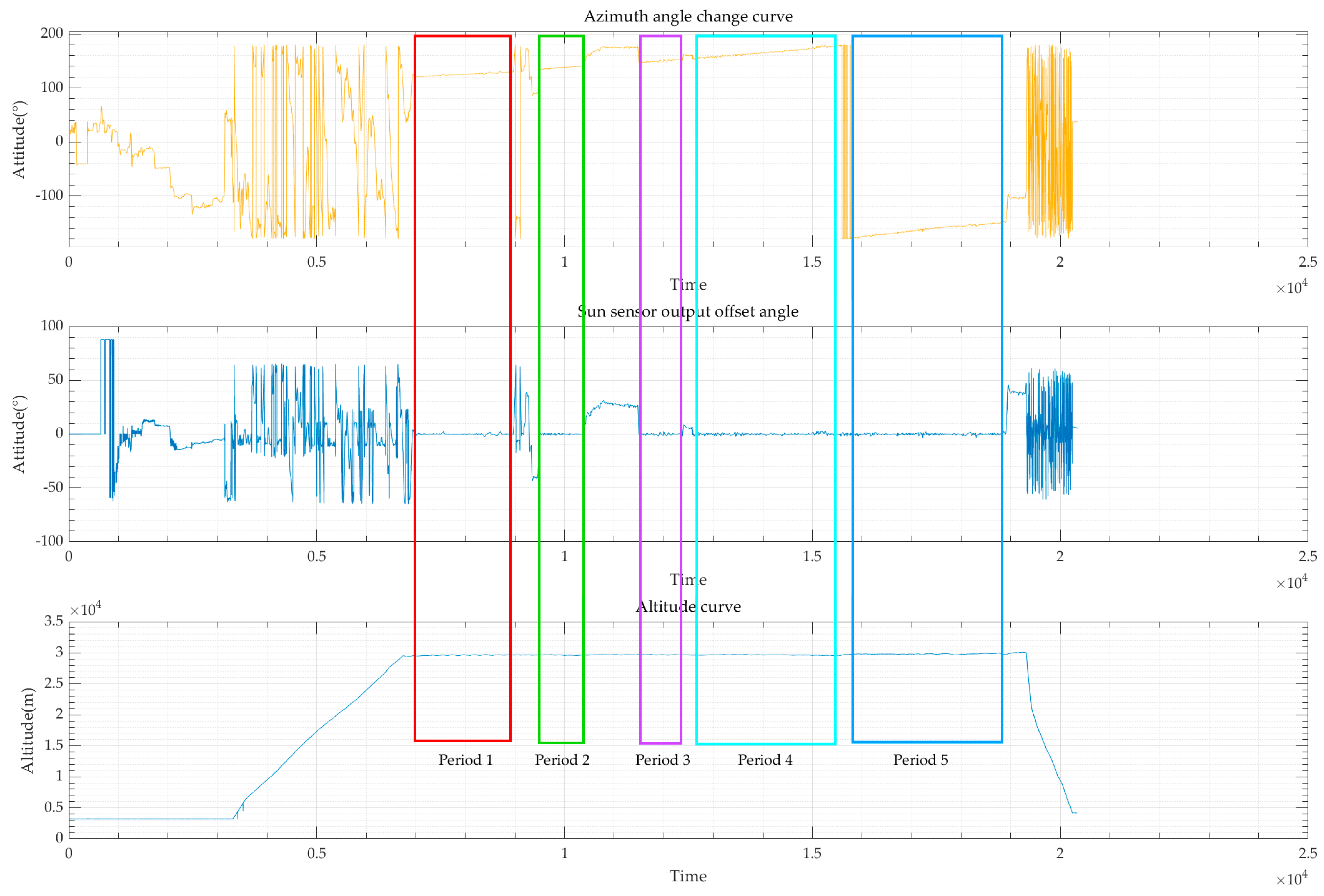
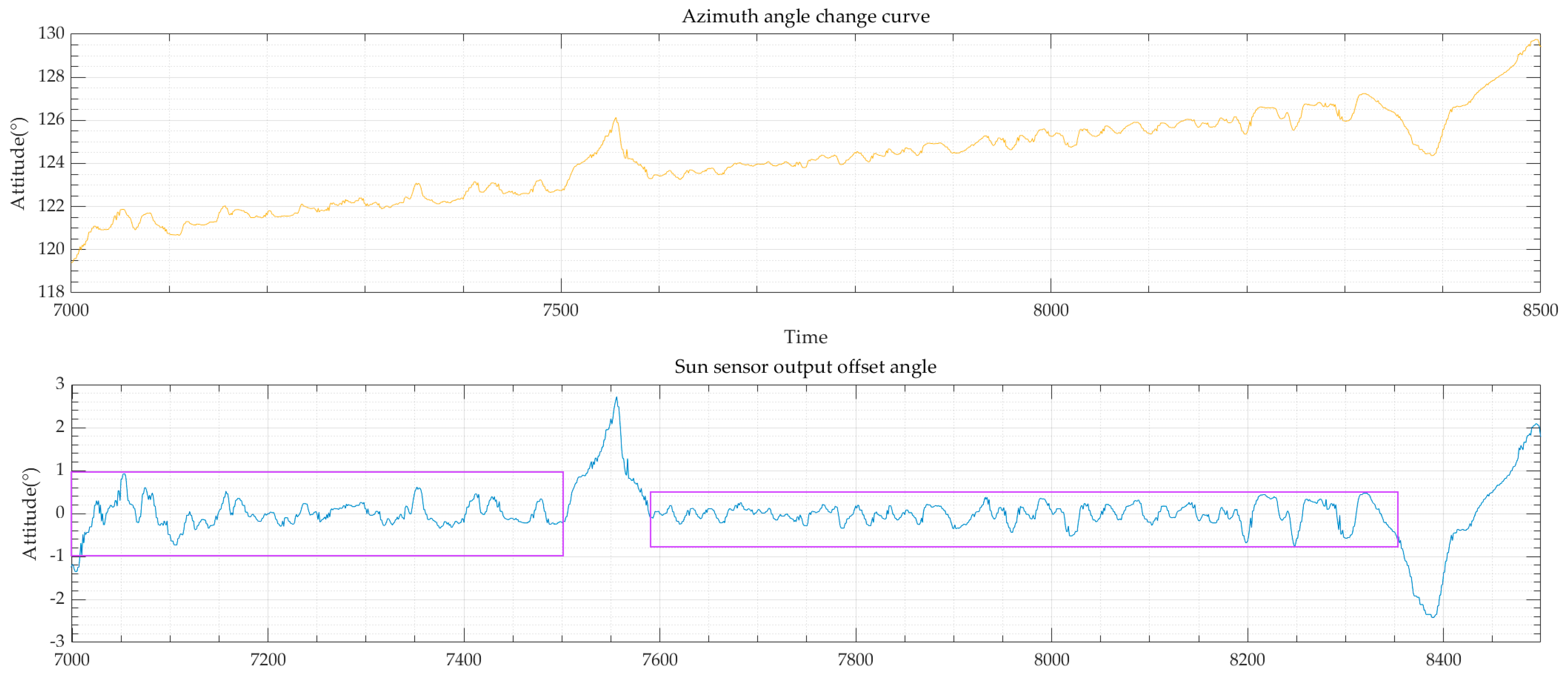
3.2. Flight Result Analysis
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, W.-Q. Near-space vehicles: Supply a gap between satellites and airplanes for remote sensing. IEEE Aerosp. Electron. Syst. Mag. 2011, 26, 4–9. [Google Scholar] [CrossRef]
- Azadi, M.; Popov, G.A.; Lu, Z.; Eskenazi, A.G.; Bang, A.J.W.; Campbell, M.F.; Hu, H.; Bargatin, I. Controlled levitation of nanostructured thin films for sun-powered near-space flight. Sci. Adv. 2021, 7, eabe1127. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Huang, M.; Qian, L.; Zhao, B.; Wang, G. High-Altitude Balloon-Based Sensor System Design and Implementation. Sensors 2020, 20, 2080. [Google Scholar] [CrossRef] [PubMed]
- Sun, G.; Li, M.; Wang, Y.; Zhou, K.; Hu, X.; Guo, Z.; Zhu, L. Temperature-compensated fiber-optic online monitoring methodology for 3D shape and strain of near-space airship envelope. Appl. Opt. 2022, 61, 9279–9295. [Google Scholar] [CrossRef] [PubMed]
- Rhodes, J.; Dobke, B.; Booth, J.; Massey, R.; Liewer, K.; Smith, R.; Amara, A.; Aldrich, J.; Berge, J.; Bezawada, N.; et al. Space-quality data from balloon-borne telescopes: The High Altitude Lensing Observatory (HALO). Astropart. Phys. 2012, 38, 31–40. [Google Scholar] [CrossRef]
- Tucker, G.S.; Ade, P.A.; Bock, J.J.; Devlin, M.; Griffin, M.; Gundersen, J.; Gundersen, J.; Halpern, M.; Hargrave, P.; Hughes, D.; et al. The balloon-borne large aperture sub-millimeter telescope. Adv. Space Res. 2004, 33, 1793–1796. [Google Scholar] [CrossRef]
- Cathey, H.M. Development overview of the revised NASA Ultra Long Duration Balloon. Adv. Space Res. 2008, 42, 1624–1632. [Google Scholar] [CrossRef]
- Gunderson, K.S.; Chen, C.H.; Christensen, F.E.; Craig, W.W.; Decker, T.A.; Hailey, C.J.; Harrison, F.A.; McLean, R.; Wurtz, R.E.; Ziock, K. Ground performance of the High-Energy Focusing Telescope (HEFT) attitude control system. Proc. Spie Int. Soc. Opt. Eng. 2004, 5165, 158–168. [Google Scholar]
- Kremic, T.; Cheng, A.F.; Hibbitts, K.; Young, E.F.; Ansari, R.R.; Dolloff, M.D.; Landis, R.R. Stratospheric balloons for planetary science and the Balloon Observation Platform for Planetary Science (BOPPS) mission summary. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar]
- Stambaugh, K.; Bernasconi, P.; Bauer, B. Using the BOPPS balloon mission as a tool to provide engineers with end-to-end mission development experience. In Proceedings of the AIAA SPACE 2015 Conference and Exposition, Pasadena, CA, USA, 31 August–2 September 2015. [Google Scholar]
- Diller, J.; Dinkel, K.; Dischner, Z.; Young, E. Design and performance of the BOPPS UVVis fine pointing system. In Proceedings of the 2015 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2015. [Google Scholar]
- Lewis, M.; Juergens, J.; Aretskin-Hariton, E.; Woodruff, R. Image guider subsystem analysis for the GHAPS project. In Proceedings of the Ground-Based and Airborne Instrumentation for Astronomy VII, Austin, TX, USA, 10–14 June 2018. [Google Scholar]
- Catanzaro, B.E.; Pham, T.; Olmi, L.; Martinson, K.E.; Devlin, M. Design and fabrication of a lightweight 2-m telescope for the balloon-borne large-aperture submillimeter telescope: BLAST. Proc. SPIE Int. Soc. Opt. Eng. 2002, 4818, 71–78. [Google Scholar]
- Wiebe, D.V. BLAST: A Balloon-Borne, Large-Aperture, Submillimetre Telescope; University of Toronto: Toronto, ON, Canada, 2008. [Google Scholar]
- Pascale, E. The Balloon-borne Large Aperture Submillimetre Telescope (BLAST) and BLASTPol. Proc. Int. Astron. Union 2012, 8, 154–160. [Google Scholar] [CrossRef]
- Lorenzo, M. BLAST: Studying Cosmic and Galactic Star Formation from a Stratospheric Balloon. Ph.D. Thesis, Cardiff University, Cardiff, UK, 2011. [Google Scholar]
- Pascale, E.; Ade, P.A.R.; Angilè, F.E.; Benton, S.J.; Devlin, M.J.; Dober, B.; Fissel, L.M.; Fukui, Y.; Gandilo, N.N.; Gundersen, J.O.; et al. The balloon-borne large-aperture submillimeter telescope for polarimetry-BLASTPol: Performance and results from the 2010 Antarctic flight: Proc. SPIE. In Proceedings of the Ground-Based and Airborne Telescopes IV, Amsterdam, The Netherlands, 27 September 2012. [Google Scholar]
- Soler, P.J.; Ade, P.A.; Angile, F.E.; Benton, S.J.; Devlin, M.J.; Dober, B.; Fissel, L.M.; Fukui, Y.; Galitzki, N.; Klein, J.; et al. Thermal design and performance of the balloon-borne large aperture submillimeter telescope for polarimetry BLASTPol: Proc. SPIE. In Proceedings of the Ground-based and Airborne Telescopes V, Montréal, QC, Canada, 22 July 2014. [Google Scholar]
- Lourie, N.P.; Ade, P.A.R.; Angile, F.E.; Ashton, P.C.; Austermann, J.E.; Devlin, M.J.; Dober, B.; Galitzki, N.; Gao, J.; Gordon, S.; et al. Preflight characterization of the BLAST-TNG receiver and detector arrays. In Proceedings of the SPIE 10708, Millimeter, Submillimeter, and Far-Infrared Detectors and Instrumentation for Astronomy IX, Austin, TX, USA, 10–15 June 2018. [Google Scholar]
- Galitzki, N. Magnetic Fields in Molecular Clouds: The BLASTPol and BLAST-TNG Experiment; University of Pennsylvania: Pennsylvania, PA, USA, 2016. [Google Scholar]
- Cocco, G.D.; Basili, A.; Franceschini, T.; Landini, G.; Malaguti, G.; Palladino, G.; Silvestri, S.; Gizzi, L.A.; Barbini, A.; Galimberti, M. HiPeG: A high performance balloon gondola for fine angular resolution X-ray telescopes. Adv. Space Res. 2006, 37, 2103–2107. [Google Scholar] [CrossRef]
- Barthol, P.; Gandorfer, A.; Solanki, S.K.; Schüssler, M.; Chares, B.; Curdt, W.; Deutsch, W.; Feller, A.; Germerott, D.; Grauf, B.; et al. The Sunrise Mission. Sol. Phys. 2011, 268, 1–34. [Google Scholar] [CrossRef]
- Walker, C.K.; Kulesa, C.A.; Groppi, C.E. The Stratospheric Terahertz Observatory (STO): An LDB Experiment to Investigate the Life Cycle of the Interstellar Medium. In Proceedings of the 19th International Symposium on Space Terahertz Technology, Groningen, The Netherlands, 28–30 April 2008; Volume 28, p. 32. [Google Scholar]
- Chauvin, M.; Friis, M.; Jackson, M.; Kawano, T.; Kiss, M.; Mikhalev, V.; Ohashi, N.; Stana, T.; Takahashi, H.; Pearce, M. Calibration and performance studies of the balloon-borne hard X-ray polarimeter PoGO+. Nucl. Instrum. Methods Phys. Res. 2017, 859, 125–133. [Google Scholar] [CrossRef]
- Christian, L. The Stratospheric Balloon Mission PoGO+ from Esrange to Victoria Island. In Proceedings of the AIAA Balloon Systems Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar]
- He, F. Remote Sensing of planetary space environment. Chin. Sci. Bull. 2020, 65, 1305–1319. (In Chinese) [Google Scholar] [CrossRef]
- Wang, Z.; Huang, M.; Sun, Y.; Tao, T.; Qian, L.; Zhang, G.; Zhao, B.; Han, W.; Wang, G.; Zhao, Y. Near-Earth space balloon-based multi-band airglow imager optic design. Appl. Opt. 2021, 60, 8057–8068. [Google Scholar] [CrossRef] [PubMed]
- Jun, L.; TengFei, S.; MingZhe, S.; Tao, Z.; FangYu, X.; JingXing, W.; Yu, F.; Yan, L.; KaiFeng, K.; Min, H.; et al. A 50-mm balloon-borne white-light coronagraph: I.Basic structure and experiments on the ground. Sci. Sin. Phys. Mech. Astron. 2023, 53, 259611. [Google Scholar] [CrossRef]
- Wei, F.; Zhang, X.; Peng, S.; Li, W.; Li, C.; Leng, S.; Feng, P. Solar FUV/UV Spectrometer Onboard High Altitude Balloon Flight in the Near Space. Acta Photonica Sin. 2021, 50, 1222002. [Google Scholar]
- Chen, Z.; Li, R.; Sun, X.; Yang, K.; Wang, B.; Bai, Y.; Wang, L. Control system of intensified ultraviolet spectrometer in near space, Proc. SPIE 12254. In Proceedings of the International Conference on Electronic Information Technology (EIT 2022), 122542M, Chengdu, China, 23 May 2022. [Google Scholar] [CrossRef]
- Yajima, N.; Kokaji, S.; Hashino, S. Report of Mechanical Engineering Laboratory No.135; ISAS: Sagamihara, Japan, 1986. [Google Scholar]
- Gruner, T.D.; Olney, D.J.; Russo, A.M. Measurements of Load Train Motion on a Stratospheric Balloon Flight; NASA Goddard Space Flight Center: Greenbelt, MD, USA, 2005. [Google Scholar]
- Zlotnik, D.; Forbes, J. Dynamic modelling, estimation, and control for precision pointing of an atmospheric balloon platform. Trans. Can. Soc. Mech. Eng. 2014, 38, 263–274. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time | Country | Name | Index |
|---|---|---|---|
| 2005 | The United States | BLAST | 40 km |
| 2005 | Italy | HiPeG | 10″ |
| 2009 | Germany and the United States | Sunrise | 35 km to 37 km, 7.5″ |
| 2010 | The United States | STO | 35 km, 1″ |
| 2016 | Sweden | POGO | 0.01° |
| Parameter | Index |
|---|---|
| Horizon pointing range | Azimuth: −160° to +160° |
| Pitch: +5° to +78° | |
| Search angular velocity | ≥3°/s |
| Search angular acceleration | ≥3°/s2 |
| Tracking accuracy | ≤10″ |
| Precision tracking camera | Image size: 1600 × 1200 Maximum frame rate: 80 fps Measurement accuracy: 1″ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, L.; Huang, M.; Zhao, W.; Sun, Y.; Lu, X.; Zhang, Z.; Wang, G.; Zhao, Y.; Wang, Z. High-Precision Pointing and Tracking System Design for Near-Space Balloon-Based Optical Observation. Appl. Sci. 2024, 14, 6531. https://doi.org/10.3390/app14156531
Qian L, Huang M, Zhao W, Sun Y, Lu X, Zhang Z, Wang G, Zhao Y, Wang Z. High-Precision Pointing and Tracking System Design for Near-Space Balloon-Based Optical Observation. Applied Sciences. 2024; 14(15):6531. https://doi.org/10.3390/app14156531
Chicago/Turabian StyleQian, Lulu, Min Huang, Wenhao Zhao, Yan Sun, Xiangning Lu, Zixuan Zhang, Guangming Wang, Yixin Zhao, and Zhanchao Wang. 2024. "High-Precision Pointing and Tracking System Design for Near-Space Balloon-Based Optical Observation" Applied Sciences 14, no. 15: 6531. https://doi.org/10.3390/app14156531