Abstract
Virtual reality (VR) offers immersive visual and auditory experiences, transporting users to alternate realities. However, existing VR systems lack realistic haptic feedback mechanisms, resulting in unsatisfactory immersive experiences. In this study, we developed and tested a haptic glove that simulates realistic tactile sensations, enhancing user interaction with virtual artifacts. Our research investigates the impact of finger-specific vibrotactile feedback (FSVF) on user experience in virtual museum environments. Using a mixed-methods approach, 30 participants engaged in object-manipulation tasks in three settings: no haptic feedback, standard controller feedback, and vibrotactile glove feedback. The findings demonstrate that the vibrotactile glove approach considerably improves user accuracy, efficiency, immersion, and satisfaction compared with other traditional interaction methods. Participants completed tasks more accurately and quickly with the glove, reporting high levels of engagement and immersion. The results highlight the potential of advanced haptic feedback in transforming virtual reality technology, particularly for educational and cultural applications. Further, they provide valuable insights for designing and applying future haptic technology in immersive environments.
1. Introduction
Virtual reality (VR) has revolutionized how we experience digital environments, offering immersive visual and auditory experiences that transport users to alternate realities. Despite these advancements, the tactile dimension remains significantly underexplored, particularly in educational and museum settings where touch is crucial in interaction and learning. Current VR systems rely heavily on visual and auditory cues while lacking realistic haptic feedback, resulting in limited immersive experiences [1]. To address this gap, introducing a vibrotactile glove represents a pioneering step toward enhancing tactile interactions in virtual environments [2]. This technology aims to enhance the users’ experience by simulating the feel and textures of different materials, thereby making virtual interactions more realistic and engaging [3]. Several studies have explored various forms of haptic feedback in VR; however, few have focused on the detailed and nuanced feedback necessary for applications such as virtual museums.
Virtual museums offer a unique platform for education and cultural engagement, allowing users to explore artifacts and exhibits worldwide. However, the inability to touch and feel these virtual objects limits the depth of interaction and the overall immersive experience. We can bridge this sensory gap by integrating FSVF, potentially transforming how users interact with and perceive virtual artifacts [4]. This study presents a novel approach to enhancing user interaction in virtual museum environments by developing and applying an FSVF glove. Unlike previous research that has primarily focused on general haptic feedback in VR, this study introduces a highly detailed and nuanced form of tactile feedback specifically tailored for virtual museums. The unique contribution of this research lies in its mixed-methods evaluation of user performance, efficiency, immersion, and satisfaction when interacting with virtual artifacts using the FSVF glove compared to traditional methods. The findings demonstrate significant improvements in task accuracy, reduction in errors, and enhanced user engagement, thereby offering new insights into the design and application of advanced haptic technologies in educational and cultural VR settings. This study not only bridges the sensory gap in VR interactions but also provides a foundational framework for future innovations in haptic feedback, paving the way for more immersive and realistic virtual experiences.
We hope to demonstrate the transformative potential of vibrotactile feedback in enhancing virtual museum visits and contribute valuable insights to the design and application of haptic technology in virtual environments. Our findings provide a foundation for future innovations in virtual reality, ultimately enriching the immersive experiences offered by interactive digital environments.
2. Related Work
The exploration of vibrotactile feedback in virtual reality (VR) spans gaming, education, and virtual museums. This study focuses on integrating frequency selective vibrotactile feedback (FSVF) in virtual museum environments to enhance precision and immersion, building on existing haptic technology and virtual reality interaction design research [5,6].
Current VR technologies primarily rely on visual and auditory stimuli, with haptic feedback remaining challenging due to the difficulty of simulating realistic tactile sensations compactly and cost-effectively [7]. Emerging research has highlighted the profound influence of haptic feedback in enhancing user experience in virtual environments. Studies have demonstrated the benefits of realistic haptic feedback in medical training, robot-assisted virtual reality, and interactive displays, underscoring the importance of advanced tactile feedback mechanisms [8,9,10,11]. Despite advancements, simulating realistic tactile sensations compactly and cost-effectively remains a challenge. This study addresses this by exploring FSVF to achieve more precise and immersive haptic feedback in virtual museum environments.
The evolution of haptic technologies has been crucial in advancing VR and augmented reality (AR). Significant advancements include the development of devices (e.g., Hapkit) and advanced material technologies, as well as the introduction of high-fidelity haptic gloves (e.g., HaptX and SenseGlove Nova 2) [12,13,14,15]. These innovations aim to overcome earlier limitations and push the boundaries of haptic feedback in virtual environments, enhancing immersion and user engagement [16]. While there have been significant advancements in haptic technologies, the need for more nuanced tactile feedback mechanisms in virtual interactions is evident. This study contributes to this by examining the effectiveness of FSVF in enhancing user experience.
Advancements in tactile interaction within virtual environments have explored the integration of multisensory feedback to enhance immersion. Studies have explored hybrid haptic systems, reality skins, and fingertip tactile devices, highlighting the role of tactile feedback in improving navigation, object manipulation, and overall user experience [17,18,19,20,21]. These developments demonstrate the importance of nuanced tactile feedback in creating realistic and engaging virtual interactions [22].
The integration of haptic feedback into educational and museum settings will transform audience engagement and learning experiences. Research shows that haptic feedback can enrich art appreciation, enhance visitor experiences, and improve interactive learning [23,24,25]. Applications in mobile AR and VR training underscore the potential of haptic feedback in making museum visits more immersive and educational, fostering more profound connections between visitors and exhibits [26,27,28]. Previous research has shown the potential benefits of haptic feedback in educational and museum contexts, yet there is a need for more empirical studies demonstrating these effects. This study aims to fill this gap by empirically testing the impact of FSVF on user engagement and learning in virtual museum environments.
Hand-tracking technologies significantly enhance VR interactions by allowing more natural and intuitive user interfaces. Advances in hand tracking accuracy, gesture sensing, and generative adversarial networks have improved the fidelity of virtual hand interactions, making VR experiences more realistic and engaging [29,30,31,32]. These technologies are crucial for achieving detailed and accurate virtual interactions, contributing to more immersive and satisfactory virtual environments [33].
Building on these foundations, this study aims to provide novel insights into the application of FSVF in virtual museums, enhancing user performance, efficiency, immersion, and satisfaction. Moreover, the results will provide valuable insights for future advancements in VR and haptic technology.
3. Methodology
This methodology section outlines the development of the vibrating glove and the detailed approach undertaken to evaluate the impact of the FSVF on user performance, effectiveness, immersion, and satisfaction in a virtual museum environment. It is organized into several key parts, starting with hardware and software enhancements to the vibrotactile glove, followed by experimental design and data collection methods.
3.1. Hardware and Software Enhancements
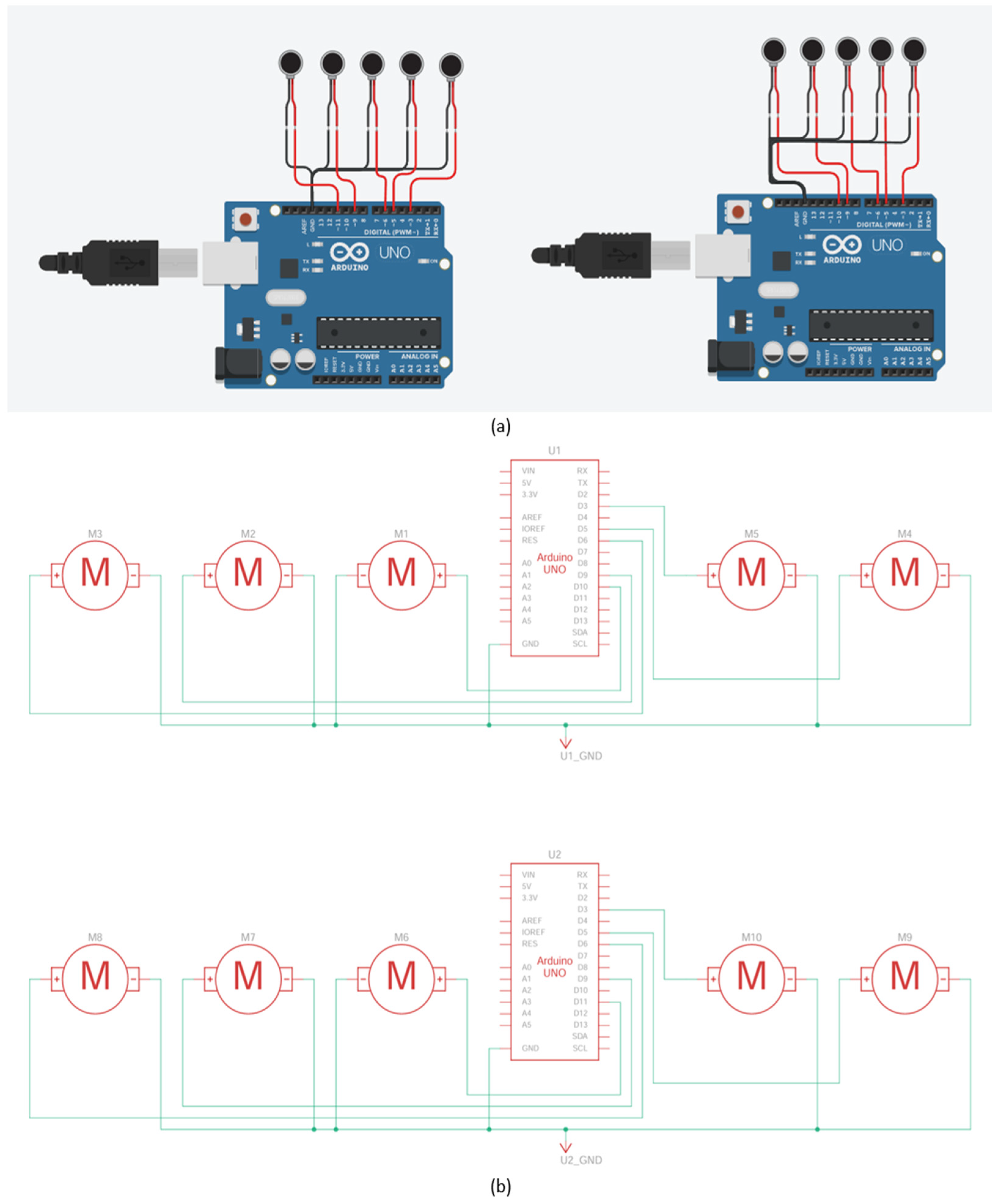
The vibrotactile glove underwent significant hardware enhancements to improve user experience in the virtual museum setting based on feedback from an initial pilot study [34]. These improvements enhanced tactile feedback fidelity, ergonomic comfort, and overall user interaction. To accommodate the number of eccentric rotating mass (ERM) motors, we employed two Arduino Uno boards, one for each hand as shown in Figure 1a. This setup allowed for sophisticated control and independent motor activation, essential for simulating various textures within the virtual museum. Each hand features five ERM motors, one for each fingertip, enabling detailed and nuanced haptic feedback that accurately mimics the tactile sensations of different materials. By assigning a motor to each finger, the glove provides specific feedback depending on the part of the hand that interacts with the virtual object, significantly enhancing realism.

Figure 1.
(a) Dual Arduino Uno setup; (b) pulse width modulation control scheme.
Pulse width modulation pins on the Arduino boards were employed to modulate the vibration intensity, which is crucial for simulating a wide range of textures, from smooth porcelain to rough stone as shown in Figure 1b. The ability to dynamically adjust the vibration intensity was key to achieving a realistic sensory experience. To address the comfort and fit issues identified in the pilot study, significant ergonomic improvements were made.
Figure 2 shows the custom 3D-printed fingertip holders, designed to fit snugly around each finger and provide a stable base for the ERM motors. The glove model was resized using the Blender software (version 3.1.2) to better match users’ ergonomic needs, improving usability and wearability. Each fingertip holder features adjustable elastic bands to accommodate different finger sizes and shapes, enhancing the glove’s usability and accessibility. The materials for the glove were chosen to balance durability and comfort. Flexible, lightweight materials were selected for the glove body to allow natural hand movements and reduce fatigue during prolonged use while ensuring durability to support the embedded hardware. Wiring and electronic components were carefully integrated to ensure user safety and comfort. The wiring layout was optimized to minimize bulkiness and prevent interference with natural hand movements, with protective measures implemented to shield users from electrical hazards.

Figure 2.
Design of custom 3D-printed fingertip holders for ERM motors.
Software enhancements were adopted to elevate the tactile feedback mechanism’s precision and realism, as well as the user interaction, within the virtual museum environment. These enhancements were essential to providing an immersive and real experience. The software modifications spanned several areas, including programming environments, integration protocols, and user interaction scripts, all tailored to improve the functionality and responsiveness of the vibrotactile glove.
A cornerstone of the software enhancement involved deepening the integration with Unity 3D software (version 2021.3.8f1) and the Oculus Integration Software Development Kit (SDK) (version IDE 2.3.2). This was achieved by developing a custom script suite to facilitate seamless communication between the vibrotactile glove hardware and the virtual environment. These scripts allowed for dynamic changes in the vibration intensities based on the user’s interaction with virtual objects, ensuring realistic simulated sensations for various textures (e.g., the roughness of stone or the smoothness of porcelain).
The glove’s haptic feedback system was driven by five ERM motors for each glove, controlled by Arduino Uno boards. Custom sketches were developed for these boards using the Arduino Integrated Development Environment. Each motor’s operation was intricately programmed to align with specific virtual interactions, allowing for nuanced feedback that varied by intensity to accurately simulate the different tactile sensations. This programming also included the establishment of unique COM port numbers for each Arduino board, ensuring precise identification and control of each glove in the Unity 3D environment.
To further refine the users’ experience, we developed a complex logic system that governed the glove’s haptic feedback mechanism. This involved the creation of a finger collision script within Unity 3D, enabling the system to detect which part of the glove was in contact with a virtual object. Each finger was assigned a unique identifier, allowing the system to deliver tailored haptic feedback that corresponded to the specific texture of the object being touched. This logic extended to varying the vibration intensity of the motors based on the virtual object’s properties, for example, a softer vibration for ceramic objects and a more intense vibration for stone objects.
3.2. Virtual Object and Interaction Design
The virtual environments were enhanced with a carefully curated assortment of 28 virtual objects, representing a broad spectrum of material textures, including wooden, ceramic, porcelain, and stone artifacts. These objects were meticulously selected for their distinct tactile characteristics—from the intricate grain patterns of wood to the sleek smoothness of porcelain—to challenge and showcase the glove’s capacity for nuanced haptic feedback. High-quality models from SketchFab were adopted to ensure detailed textures and visual realism. Each artifact was tagged with specific identifiers to facilitate accurate feedback and interaction during tasks.
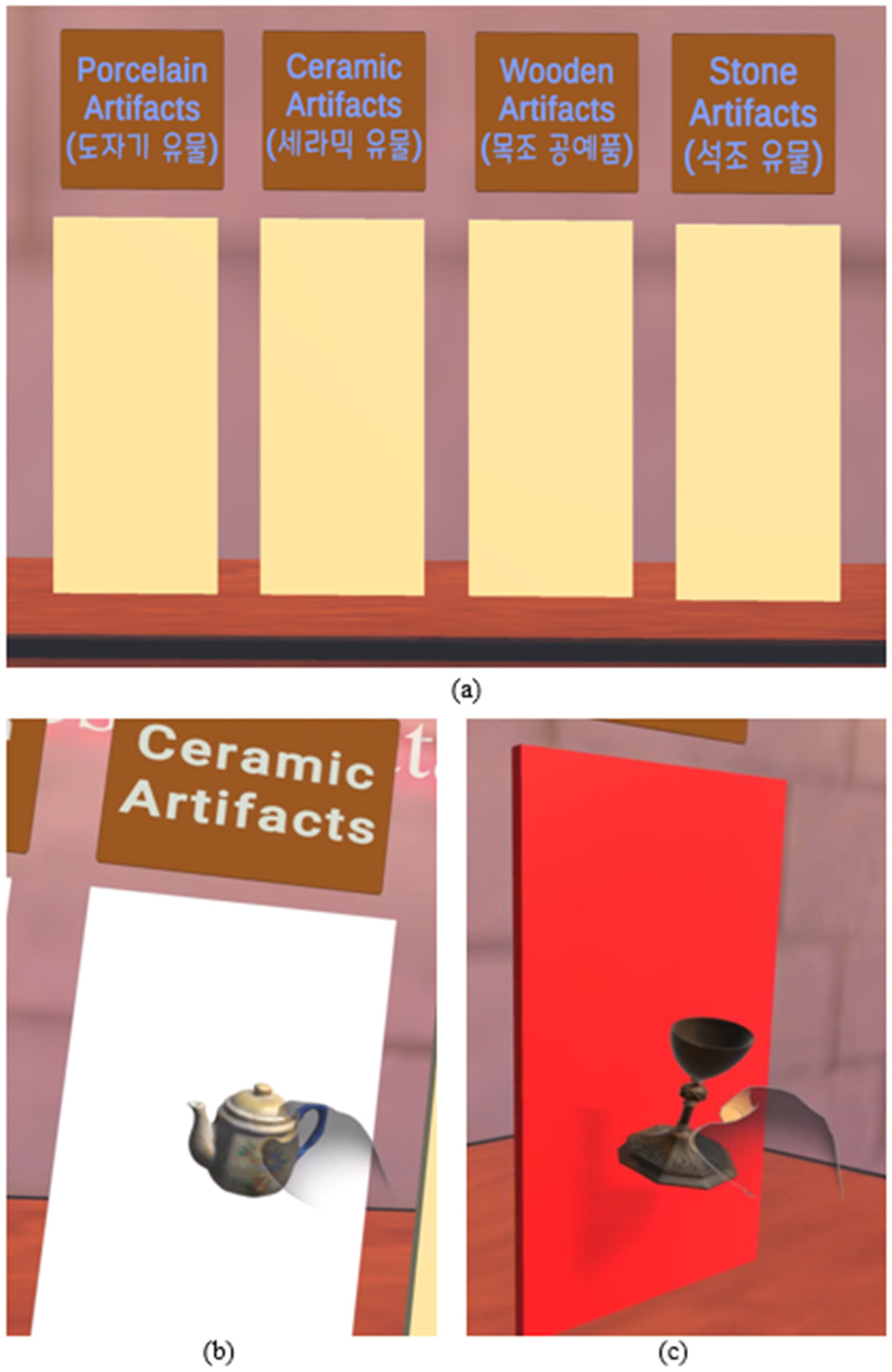
As shown in Figure 3a four virtual boards, each designated for one material type (wood, porcelain, ceramic, and stone) were developed as interactive platforms within the Unity environment. These boards served as repositories where users would match each virtual object according to its material classification. Initially, the boards displayed a neutral yellow color, which dynamically changed based on the user’s interaction: red for incorrect matches and white for correct ones as shown in Figure 3b. This color-coding system provided instant visual feedback, aiding users in learning and adapting during the task.

Figure 3.
(a) Material categorization boards; (b) correct and incorrect match indication on the material board; (c) informational board in Korean and English.
To enhance user understanding of task performance, two informational boards were created. One board featured instructions and task details in English, and it was equipped with visual aids to improve comprehension. Figure 3c shows a companion board that presented similar content, ensuring accessibility for a broader audience. Both boards included video samples demonstrating interactions with virtual objects to provide clear visual guidance.
- (1)
- A comprehensive script governed the task’s operational logic and ensured accurate detection and feedback provision. This script included several key functionalities:
- (2)
- User-interaction detection: Utilized advanced collider technology to detect when a user interacted with a virtual object or material board, fine-tuned to recognize specific gestures and touches for high interaction accuracy.
- (3)
- Logic matching: Employed a sophisticated algorithm to assess the match between the selected object and the targeted board, facilitating an automated and immediate assessment of the user’s selection accuracy.
- (4)
- Feedback mechanism: Adjusted visual cues (board colors) and triggered specific haptic feedback intensity through the glove upon each interaction. The intensities varied to correspond to the virtual object’s material properties, simulating a realistic tactile sensation.
- (5)
- Performance tracking: Embedded a detailed tracking system to log each participant’s task completion times and error rates, crucial for the quantitative analysis of the glove’s impact on user performance and interaction efficiency.
Building on the hardware and software enhancements, the experiment’s design included a set of visually similar artifacts for each setting, making them challenging to distinguish by sight alone. This modification highlighted the effectiveness of the vibrotactile glove in enhancing user interaction and performance within the virtual museum setting, demonstrating the potential of tactile feedback in compensating for visual ambiguities.
The experiment was meticulously crafted to evaluate the vibrotactile glove through a comprehensive setup, starting with a user training session, followed by three distinct testing settings shown in Figure 4. Each phase was designed to assess how tactile feedback influences user interaction and experience within a virtual museum. Key metrics, such as the accuracy of artifact placement and task completion time, were measured to evaluate the effectiveness of the vibrotactile feedback in enhancing user performance and experience.

Figure 4.
Experimental setup with Oculus Quest 2 and vibrotactile glove components.
3.3. Result Collection and Data Analysis
In this study, quantitative data were collected using structured questionnaires after participants interacted with virtual museum artifacts in three settings: no haptic feedback, standard controller feedback, and vibrotactile glove feedback. Participants performed tasks involving the identification and manipulation of virtual artifacts, with metrics such as task completion time and accuracy recorded to assess performance differences across settings.
After the participants’ interaction in each setting, they completed a presence questionnaire [35] using a Likert scale to measure subjective experiences of presence and immersion [36]. After all interactions in all settings were completed, a comparison questionnaire [35] was administered to gather participant preferences and overall satisfaction with each interaction method. Thereafter, they filled out a supplementary glove questionnaire evaluating the glove’s comfort and usability [37].
Data analysis focused on quantitative methods to evaluate the effectiveness of glove haptics. Responses from the presence questionnaire were analyzed using paired-sample t-tests to compare mean scores for task performance and user satisfaction across the three settings. Descriptive statistics, including means and standard deviations, were calculated for task metrics. Paired-sample t-tests identified significant differences among settings, and graphical representations illustrated comparative results of performance and satisfaction levels, highlighting the impact of advanced haptic feedback. The data analysis was conducted using the SPSS software (version 27) by IBM [38].
Although qualitative data collection was not a primary focus, open-ended responses in the comparison questionnaire provided insights into user experiences and preferences. These responses were categorized and summarized to identify common themes related to haptic feedback intensity, timing, and realism. This feedback contextualized quantitative findings, offering a deeper understanding of user experiences and highlighting areas for improvement in haptic technology.
This comprehensive approach ensured that both objective performance metrics and subjective user experiences were considered, providing a robust evaluation of the vibrotactile glove’s effectiveness. The final analysis validated the hypothesis that glove haptics significantly enhance user performance and satisfaction in virtual environments, supporting the development of more immersive and interactive haptic technologies for various applications.
3.4. Experiment: Evaluating Vibrotactile Glove
The study sampled a diverse group of 30 participants, categorized by age, gender, and nationality. The age distribution highlights a predominantly young demographic, with 56.7% in their 20s and 40% in their 30s, indicating a relatively youthful participant base. A single individual in their 40s represents the smallest age category at 3.3%. The gender composition of the participants is predominantly male (66.7%), with females representing the remaining 33.3%.
Participants hailed from a range of countries, with the largest representations from India (36.7%), followed by South Korea (20%). Other participant nationalities included Nepal (13.3%), China (10%), and Mongolia (6.7%), with minimal representations from Sri Lanka, Ethiopia, Vietnam, and Malaysia, each constituting 3.3% of the sample.
The analysis indicates varying exposure to VR technologies across demographic segments. The younger demographic (the 20s) shows a more balanced distribution of virtual reality experience, suggesting a greater inclination or opportunity towards engaging with emerging technologies compared to the older groups. Gender-wise, males demonstrated slightly higher exposure to virtual reality (35% with experience) than females (20% with experience), indicating potential gender disparities in access to or interest in virtual reality technologies.
Familiarity with haptic technology is significantly lower across all demographic segments than VR technology. In age-related terms, the youngest group (20s) showed slightly more familiarity, although the overall experience level remains low across all age groups. Gender disparities are pronounced in haptics technology, with no females reporting any experience, while a small proportion of males (20%) indicated some level of familiarity.
Participants first undergo a training session aimed at acquainting them with the virtual museum environment. This session includes instructions on navigating the virtual reality space and manipulating virtual objects. The training is crucial for ensuring that participants are comfortable with the virtual reality interface, allowing for a fair assessment of the vibrotactile glove’s effectiveness. The session focuses on general navigation and interaction techniques without delving into the specifics of the haptic feedback to avoid preconceived expectations about the tactile sensations.
The main experiment was structured in three experimental settings as shown in Figure 5 to evaluate the impact of different types of feedback on user performance and experience:

Figure 5.
(a) Condition 1 without haptic feedback and user interaction; (b) condition 2 controller-based interaction and user interaction with oculus hand controllers; (c) condition 3 vibrotactile glove testing and user interaction with vibrotactile glove.
Condition 1 with no haptics: In this initial phase, participants are tasked with matching visually similar artifacts to their corresponding material boards, relying solely on visual information. This setup, Figure 5a, was designed to test their ability to discern differences among artifacts without the aid of tactile feedback, establishing a baseline for performance. The challenge lies in the artifacts’ visual similarity, designed to emphasize the limitations of relying only on visual cues in the virtual museum environment. Throughout this task, task completion time and error count are meticulously recorded to establish a baseline for performance. This data will later serve as a reference point for evaluating the added value of haptic feedback in subsequent conditions. After completing this task, participants provide feedback through a questionnaire [35], detailing their experience and any difficulties faced due to the absence of haptic feedback
Condition 2 with oculus hand controller haptics feedback: This condition introduces standard haptic feedback through the oculus hand controller Figure 5b. Participants engage with a set of visually similar artifacts as in the first condition. However, this time, they receive generalized vibration feedback from the controller based on the objects’ surface textures they interact with. This setup was designed to assess whether the introduction of generic haptic feedback aids in differentiating between the artifacts compared to relying solely on visual cues. It serves as a critical step to evaluate the enhancement in user performance and experience provided by adding a tactile dimension to the interaction. Upon completion, participants fill out the same presence questionnaire to reflect on the impact of incorporating standard haptic feedback into the task. As with the first condition, task completion time and error count are recorded to assess improvements or changes in performance resulting from the introduction of generic haptic feedback. This information is critical for understanding whether standard virtual reality controller haptic can enhance the user’s ability to distinguish between visually similar objects. After completing this task, participants provide feedback through a questionnaire [35] like task 1.
Condition 3 with glove haptics: In the third and final condition, the experiment leverages the full capabilities of the vibrotactile glove, which offers detailed, FSHF corresponding to the textures of visually similar artifacts. Participants, shown in Figure 5c, engage with these artifacts, experiencing the nuanced feedback intended to assist in distinguishing between them despite visual similarities.
The nuanced feedback provided by the glove is expected to significantly aid participants in distinguishing between the artifacts, potentially overcoming the visual ambiguity presented in the previous conditions. The task completion time and error count are again recorded, with particular attention to any performance enhancements that demonstrate the glove’s effectiveness in overcoming visual ambiguities. This condition aims to highlight the potential of advanced haptic feedback to significantly improve user performance and immersion by providing a tactilely rich and nuanced interaction experience. After engaging with the task, participants will complete the same presence questionnaire [35] to reflect on the impact of incorporating the vibrotactile glove.
Upon completion of all experimental conditions, participants were requested to complete a comparison questionnaire aimed at discerning their preferences among the three conditions: no haptic feedback, controller haptic feedback, and glove haptic feedback [35]. This comprehensive questionnaire prompted participants to rank their experiences based on criteria such as immersion, satisfaction, and perceived accuracy in artifact matching. Following the completion of the comparison questionnaire, participants were further prompted to fill out a supplementary glove questionnaire [37]. This additional survey sought feedback on the comfort and usability of the glove model, aiming to gather insights into participants’ experiences with the tactile interface.
3.5. Results
The findings from the paired-sample t-tests comparing the glove haptics, no haptics, and controller haptics performances in a virtual museum environment are presented. The objective is to evaluate the impact of FSVF on user accuracy, efficiency, experience, and preference during object manipulation tasks.
To investigate user accuracy, we compared the glove haptics setting with no haptics and controller haptics. The data revealed significant differences in their performances are shown in Table 1. The mean number of correctly placed objects for the glove haptics setting (M = 17.4, SD = 5.103) was significantly higher than for the no haptics setting (M = 13.27, SD = 4.025); t (29) = 3.792, p = 0.001, indicating strong statistical significance. Similarly, the glove haptics setting values were significantly higher than those for the controller haptics setting (M = 11.27, SD = 3.129); t (29) = 6.164, p = 0.000. These findings highlight the advantage of glove haptics in facilitating more precise object placement.

Table 1.
Performance accuracy—correct and incorrect placements.
Additionally, we examined the number of incorrectly placed objects to assess error reduction. The mean number of incorrectly placed objects was significantly lower for the glove haptics setting (M = 10.5, SD = 5.185) compared to the no haptics setting (M = 20.27, SD = 7.201); t (29) = −7.520, p = 0.000. Similarly, the values for the glove haptics setting were significantly lower than those for the controller haptics setting (M = 14.77, SD = 2.763); t (29) = −4.243, p = 0.000. These results further support the superiority of glove haptics in reducing errors during object manipulation tasks.
Efficiency in object-manipulation tasks was assessed by measuring the task duration shown in Table 2. The mean task duration for the glove haptics setting (M = 76.2 s, SD = 28.95585) was significantly lower than that for the no haptic setting (M = 111.5667 s, SD = 66.24442); t (29) = 2.793, p = 0.009. Similarly, the glove haptics setting values were significantly lower than those for the controller haptics setting (M = 116.2 s, SD = 74.08588); t (29) = 2.707, p = 0.011. These results indicate that the feedback in the glove haptics setting improves efficiency in object-manipulation tasks compared to those in the no haptics and controller haptics settings.
Table 2.
Task efficiency.
User experience, encompassing immersion, presence, and satisfaction, was evaluated through mean satisfaction scores shown in Table 3. The mean satisfaction score for the glove haptics setting (M = 5.9288, SD = 0.84303) was significantly higher than that for the no haptics setting (M = 5.7412, SD = 0.84030); t (29) = 3.100, p = 0.004. Similarly, the value for the glove haptics setting was significantly higher than that for the controller haptics setting (M = 5.4833, SD = 0.97573); t (29) = 2.822, p = 0.009. These results suggest that the glove haptic feedback significantly enhances user satisfaction, immersion, and presence.
Table 3.
User experience and satisfaction.
The user preference for the glove system was assessed as shown in Table 4. The mean preference score for the glove haptics setting (M = 0.5556, SD = 0.18684) was significantly higher than that for the no haptics setting (M = 0.1852, SD = 0.14394); t (29) = 7.439, p = 0.000. Similarly, the value for the glove haptics set was significantly higher than that for the controller haptics setting (M = 0.2667, SD = 0.18592); t (29) = 4.606, p = 0.000. These results indicate that the glove haptics feedback significantly increases user preference.
Table 4.
User preferences for interaction.
The user perceptions of the haptic gloves were positive, emphasizing comfort, portability, and anticipation of haptic feedback as shown in Figure 6. The high average scores for immediate feedback 6.4 and finger-specific vibration 6.4 highlight the effectiveness and precision of the haptic feedback. The highest average score 6.43 was obtained for perceiving different vibration intensities between virtual artifacts, which enhanced the realism of and interactivity in the virtual environments. The scores for the convenience of the gloves 5.9 and the overall realistic experience 5.67 were positive but slightly relatively low, indicating general satisfaction with some room for improvement. Overall, the findings support the hypothesis that users perceive the gloves positively and anticipate haptic feedback, demonstrating their effectiveness and acceptance in enhancing user interaction and satisfaction in virtual environments.

Figure 6.
User perceptions of glove comfort and functionality.
The outcomes from the experimental assessments affirm the advantages of FSVF over conventional haptic modalities. Enhanced tactile responsiveness led to marked improvements in task accuracy, decreased error rates, and increased user engagement and satisfaction. These results validate the utility of advanced haptic feedback in enhancing virtual interactions and lay a robust groundwork for future investigations into its application across diverse virtual settings, potentially transforming user experiences in digital environments.
4. Discussion
The results of this study highlight the significant impact of FSVF on user performance, efficiency, immersion, and satisfaction in a virtual museum environment. By integrating advanced haptic technology, users were able to interact with virtual artifacts in a more precise and realistic manner, resulting in an enhanced overall experience.
The findings revealed that the vibrotactile glove significantly improved user accuracy in object-manipulation tasks compared with traditional technologies without hap-tic feedback and with standard hand-held controller feedback [38]. The glove’s ability to provide detailed, finger-specific feedback allowed users to make more accurate placements of virtual objects, demonstrating the importance of tactile feedback in enhancing task performance in virtual environments.
Efficiency in completing object-manipulation tasks was also significantly improved using the vibrotactile glove. Participants completed tasks faster when using the glove, highlighting the effectiveness of finger-specific haptic feedback in streamlining interactions within the virtual museum [39,40]. This improvement in efficiency can be attributed to the glove’s ability to provide immediate and precise tactile information, reducing the cognitive load and time required for task completion.
Moreover, the study showed that the vibrotactile glove significantly enhanced users’ sense of immersion and satisfaction. Users reported a higher level of engagement and presence when interacting with the virtual museum artifacts using the glove [41,42]. The detailed haptic feedback provided by the glove made the virtual objects feel more realistic, contributing to a more immersive experience. This increased sense of presence is crucial in educational and cultural settings where engagement and realism can significantly enhance the learning experience.
Questionnaire responses revealed that users strongly preferred the vibrotactile glove over traditional interaction methods. Participants expressed a clear preference for the glove, citing the enhanced tactile feedback as a major factor influencing their preference [43]. This positive reception suggests that users value the added dimension of touch in their virtual interactions, which traditional methods fail to provide.
The perceptions of the glove’s comfort and functionality were generally positive. Participants found the glove to be comfortable and appreciated the finger-specific feedback it provided. Although some users noted areas for improvement in terms of fit and comfort, the overall feedback was favorable, indicating that the glove is a viable tool for enhancing user interaction in virtual environments.
These findings underscore the transformative potential of FSVF in virtual museum settings. By enhancing the realism and precision of user interactions, the vibrotactile glove can significantly improve the quality of virtual experiences. This study contributes valuable insights into the design and application of haptic technology in virtual reality, suggesting that future developments in this area should continue to focus on refining tactile feedback mechanisms to further enhance user engagement and satisfaction.
Despite the significant advancements introduced by the FSVF glove, there are areas where the system could be improved to further enhance user experience and interaction. The current glove setup uses eccentric rotating mass (ERM) motors to provide tactile feedback. While effective, future improvements could explore more advanced haptic technologies, such as piezoelectric actuators or microfluidic systems, to offer finer control over vibration intensity and improve the fidelity of tactile sensations. Enhancing the software algorithms that control the glove’s feedback mechanisms could allow for more dynamic and context-specific haptic responses. While the glove has demonstrated significant benefits in virtual museum settings, future research should explore its applications in other VR environments, such as virtual classrooms, medical training, and remote collaboration. This would help to identify additional use cases and drive broader adoption of the technology. The study involved a training session to familiarize participants with the glove and virtual environment. Continued development should focus on creating more intuitive user interfaces and interaction paradigms that reduce the learning curve and make the technology more accessible to novice users. These enhancements will not only improve the current system’s performance but also pave the way for more sophisticated and widely applicable haptic feedback technologies in virtual reality.
In summary, the integration of FSVF into virtual museum environments offers a substantial improvement in user performance, efficiency, immersion, and satisfaction. The vibrotactile glove demonstrated its potential to provide a more realistic and engaging interaction experience, which is crucial for virtual reality’s educational and cultural applications.
5. Conclusions
In this study, the significant benefits of integrating FSVF into virtual museum environments were demonstrated. The vibrotactile glove, designed to provide detailed and realistic tactile sensations, markedly improved user performance, efficiency, immersion, and satisfaction during virtual interactions.
The findings showed that users could manipulate virtual objects with greater accuracy and speed when using the vibrotactile glove compared to traditional methods without haptic feedback and standard hand-held controllers. This improvement in performance and efficiency can be attributed to the glove’s ability to deliver precise, immediate tactile information, reducing cognitive load and enhancing task execution.
Moreover, the enhanced haptic feedback significantly increased the users’ sense of presence and overall satisfaction. Participants reported feeling more engaged and immersed in the virtual museum environment, with the realistic tactile sensations provided by the glove contributing to a more compelling and interactive experience. User preferences strongly favored the vibrotactile glove, highlighting the value of incorporating advanced haptic feedback in virtual reality applications.
The positive reception of the glove’s comfort and functionality further supports its viability as a tool for enhancing user interaction in virtual settings. Although some areas for improvement were noted, the overall feedback was favorable, indicating a strong potential for future refinements and broader application of this technology.
This research offers unique contributions through its mixed-methods evaluation of user performance, efficiency, immersion, and satisfaction when interacting with virtual artifacts using the FSVF glove compared to traditional methods. These insights provide a robust foundation for future developments in haptic technology, suggesting a transformative potential for various virtual applications. By meticulously assessing the detailed impacts of FSVF on user experiences, this study paves the way for innovative advancements in virtual reality and human-computer interaction, particularly in educational and cultural contexts such as virtual museums.
In summary, the integration of FSVF represents a significant advancement in VR technology, enhancing the realism and precision of virtual interactions and boosting user engagement and satisfaction. The insights gained from this study contribute valuable knowledge to the field, paving the way for more innovative and effective haptic technologies in the future.
Author Contributions
Conceptualization, R.G.; methodology, R.G. and S.N.; formal analysis, R.G.; resources, R.G.; conduct experiment, R.G.; data collection, R.G.; writing—original draft preparation, R.G.; writing—review and editing, R.G. and S.N.; supervision, S.N.; funding acquisition, S.N. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Basic Science Research Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Education (NRF2020R1I1A3051739) and was results of a study on the “Leaders in INdustry-university Cooperation 3.0” Project, supported by the Ministry of Education and National Research Foundation of Korea.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Dataset available on request from the authors.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Perret, J.; Vander Poorten, E. Touching virtual reality: A review of haptic gloves. In ACTUATOR 2018, Proceedings of the 16th International Conference on New Actuators, Bremen, Germany, 25–27 June 2018; VDE: Frankfurt am Main, Germany, 2018; pp. 1–5. [Google Scholar]
- Hagelsteen, K.; Johansson, R.; Ekelund, M.; Bergenfelz, A.; Anderberg, M. Performance and perception of haptic feedback in a laparoscopic 3D virtual reality simulator. Minim. Invasive Ther. Allied Technol. 2019, 28, 309–316. [Google Scholar] [CrossRef] [PubMed]
- Alaraj, A.; Luciano, C.J.; Bailey, D.P.; Elsenousi, A.; Roitberg, B.Z.; Bernardo, A.; Banerjee, P.P.; Charbel, F.T. Virtual reality cerebral aneurysm clipping simulation with real-time haptic feedback. Neurosurgery 2015, 11 (Suppl. S2), 52–58. [Google Scholar] [CrossRef] [PubMed]
- Sandheinrich, P.; Hutson, J. Haptic preservation of cultural ephemera: An extended reality solution using stereoscopic experience replication for Victorian parlor culture. Metaverse Bas. App. Res. 2023, 2, 202348. [Google Scholar] [CrossRef]
- Kim, M.; Jeon, C.; Kim, J. A study on immersion and presence of a portable hand haptic system for immersive virtual reality. Sensors 2017, 17, 1141. [Google Scholar] [CrossRef] [PubMed]
- Edwards, B.I.; Bielawski, K.S.; Prada, R.; Cheok, A.D. Haptic virtual reality and immersive learning for enhanced organic chemistry instruction. Virtual Real. 2019, 23, 363–373. [Google Scholar] [CrossRef]
- Wang, D.; Guo, Y.; Liu, S.; Zhang, Y.; Xu, W.; Xiao, J. Haptic display for virtual reality: Progress and challenges. Virtual Real. Intell. Hardw. 2019, 1, 136–162. [Google Scholar] [CrossRef]
- Batsaikhan, T.; Seo, Y.J. Virtual reality simulators for temporal bone dissection: Overcoming limitations of previous models. Res. Vestib. Sci. 2024, 23, 1–10. [Google Scholar] [CrossRef]
- Katranitsiotis, P.; Zaparas, P.; Stavridis, K.; Daras, P. Leveraging VR and force-haptic feedback for effective training with robots. In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), Rome, Italy, 24–26 February 2024; pp. 651–660. [Google Scholar] [CrossRef]
- Terenti, M.; Pamparău, C.; Vatavu, R.D. The user experience of distal arm-level vibrotactile feedback for interactions with virtual versus physical displays. Virtual Real. 2024, 28, 84. [Google Scholar] [CrossRef]
- Pacchierotti, C.; Chinello, F.; Koumaditis, K.; Di Luca, M.; Ofek, E.; Georgiou, O. Haptics in the Metaverse: Haptic Feedback for Virtual, Augmented, Mixed, and EXtended Realities. IEEE Trans Haptics (ToH). 2024, pp. 1–6. Available online: https://inria.hal.science/hal-04511207 (accessed on 14 April 2024).
- Orta Martinez, M.O.; Nunez, C.M.; Liao, T.; Morimoto, T.K.; Okamura, A.M. Evolution and analysis of hapkit: An open-source haptic device for educational applications. IEEE Trans. Haptics 2020, 13, 354–367. [Google Scholar] [CrossRef]
- Biswas, S.; Visell, Y. Haptic perception, mechanics, and material technologies for virtual reality. Adv. Funct. Mater. 2021, 31, 2008186. [Google Scholar] [CrossRef]
- Dickinson, K. We Tested the Most Advanced Haptic Gloves in the World. 2024. Available online: https://www.freethink.com/ar-vr/we-tested-the-most-advanced-haptic-gloves-in-the-world (accessed on 12 March 2024).
- Benko, H.; Holz, C.; Sinclair, M.; Ofek, E. Normal touch and texture touch: High-fidelity 3d haptic shape rendering on handheld virtual reality controllers. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 717–728. [Google Scholar] [CrossRef]
- Carter, R. The Best VR Gloves in 2024: Harnessing Haptic Feedback. 2024. Available online: https://www.xrtoday.com/virtual-reality/the-best-vr-gloves-in-2024-harnessing-haptic-feedback/ (accessed on 12 March 2024).
- Han, P.H.; Chen, Y.S.; Lee, K.C.; Wang, H.C.; Hsieh, C.E.; Hsiao, J.C.; Chou, C.H.; Hung, Y.P. Haptic around multiple tactile sensations for immersive environment and interaction in virtual reality. In Proceedings of the 24th ACM Symposium on Virtual Reality Software and Technology, Tokyo, Japan, 28 November–1 December 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Shapira, L.; Freedman, D. Reality skins: Creating immersive and tactile virtual environments. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Merida, Mexico, 19–23 September 2016; IEEE: New York, NY, USA, 2016; Volume 2016, pp. 115–124. [Google Scholar] [CrossRef]
- Schorr, S.B.; Okamura, A.M. Fingertip tactile devices for virtual object manipulation and exploration. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 3115–3119. [Google Scholar] [CrossRef]
- Feng, M.; Dey, A.; Lindeman, R.W. An initial exploration of a multi-sensory design space: Tactile support for walking in immersive virtual environments. In Proceedings of the IEEE Symposium on 3D User Interfaces (3DUI), Greenville, SC, USA, 19–20 March 2016; IEEE: New York, NY, USA, 2016; Volume 2016, pp. 95–104. [Google Scholar] [CrossRef]
- Ebrahimi, E.; Babu, S.V.; Pagano, C.C.; Jörg, S. An empirical evaluation of visuo-haptic feedback on physical reaching behaviors during 3D interaction in real and immersive virtual environments. ACM Trans. Appl. Percept. 2016, 13, 1–21. [Google Scholar] [CrossRef]
- Khan, R.; Azam, F.; Ahmed, S.; Anwar, W.; Chughtai, R.; Farid, A. Comparative analysis of interaction techniques in virtual reality. In Proceedings of the 23rd International Multitopic Conference (INMIC), Bahawalpur, Pakistan, 5–7 November 2020; IEEE: New York, NY, USA, 2020; Volume 2020, pp. 1–6. [Google Scholar] [CrossRef]
- Vi, C.T.; Ablart, D.; Gatti, E.; Velasco, C.; Obrist, M. Not just seeing, but also feeling art: Mid-air haptic experiences integrated in a multisensory art exhibition. Int. J. Hum. Comput. Stud. 2017, 108, 1–14. [Google Scholar] [CrossRef]
- Taylor, R.; Bowers, J.; Nissen, B.; Wood, G.; Chaudhry, Q.; Wright, P.; Bruce, L.; Glynn, S.; Mallinson, H.; Bearpark, R. Making magic: Designing for open interactions in museum settings. In Proceedings of the 2015 ACM SIGCHI Conference on Creativity and Cognition, Glasgow, UK, 22–25 June 2015; pp. 313–322. [Google Scholar] [CrossRef]
- Pallud, J. Impact of interactive technologies on stimulating learning experiences in a museum. Inf. Manag. 2017, 54, 465–478. [Google Scholar] [CrossRef]
- Bermejo, C.; Hui, P. A survey on haptic technologies for mobile augmented reality. A.C.M. Comput. Surv. 2022, 54, 1–35. [Google Scholar] [CrossRef]
- Våpenstad, C.; Hofstad, E.F.; Bø, L.E.; Kuhry, E.; Johnsen, G.; Mårvik, R.; Langø, T.; Hernes, T.N. Lack of transfer of skills after virtual reality simulator training with haptic feedback. Minim. Invasive Ther. Allied Technol. 2017, 26, 346–354. [Google Scholar] [CrossRef] [PubMed]
- Chatterjee, H. (Ed.) Touch in Museums: Policy and Practice in Object Handling; Routledge: London, UK, 2020. [Google Scholar]
- Sharp, T.; Keskin, C.; Robertson, D.; Taylor, J.; Shotton, J.; Kim, D.; Rhemann, C.; Leichter, I.; Vinnikov, A.; Wei, Y.; et al. Accurate, robust, and flexible real-time hand tracking. In Proceedings of the 33rd Annual A.C.M. Conference on Human Factors in Computing Systems, Seoul, Republic of Korea, 18–23 April 2015; pp. 3633–3642. [Google Scholar] [CrossRef]
- Lien, J.; Gillian, N.; Karagozler, M.E.; Amihood, P.; Schwesig, C.; Olson, E.; Raja, H.; Poupyrev, I. Soli: Ubiquitous gesture sensing with millimeter wave radar. A.C.M. Trans. Graph. 2016, 35, 1–19. [Google Scholar] [CrossRef]
- Mueller, F.; Bernard, F.; Sotnychenko, O.; Mehta, D.; Sridhar, S.; Casas, D.; Theobalt, C. Generated hands for real-time 3d hand tracking from monocular rgb. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 49–59. [Google Scholar]
- Simon, T.; Joo, H.; Matthews, I.; Sheikh, Y. Hand keypoint detection in single images using multiview bootstrapping. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4645–4653. [Google Scholar] [CrossRef]
- Wang, P.; Wu, P.; Wang, J.; Chi, H.L.; Wang, X. A critical review of the use of virtual reality in construction engineering education and training. Int. J. Environ. Res. Public. Health 2018, 15, 1204. [Google Scholar] [CrossRef] [PubMed]
- Ravichandran, G.; Choi, H.; Ha, C.; Nam, S. Haptic Gloves Create Realism in a VR Experience in the Virtual Museum. In Proceedings of the HCI Korea Conference, Hongcheon, Republic of Korea, 24–26 January 2024; pp. 63–67. [Google Scholar]
- Chapman, A. Haptic Feedback in Virtual Reality: An Investigation into the Next Step of First-Person Perspective Presence. Ph.D. Thesis, University of Lincoln, Lincoln, UK, 2019. [Google Scholar]
- Likert, R. A Technique for the Measurement of Attitude Scales; Archives of Psychology: New York, NY, USA, 1932. [Google Scholar]
- Yoon, Y.C.; Moon, D.; Chin, S. Fine tactile representation of materials for virtual reality. J. Sens. 2020, 2020, 1–8. [Google Scholar] [CrossRef]
- SPSS; IBM Corp. Released, Statistics for Windows, version 25.0; IBM Corp: Armonk, NY, USA, 2017.
- Moon, H.S. The Effect of Interaction Method and Vibrotactile Feedback on User Experience and Performance in the VR Games. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2022. Available online: http://hdl.handle.net/10919/110151 (accessed on 23 April 2024).
- Oakley, I.; Brewster, S.; Gray, P. Solving multi-target haptic problems in menu interaction. In CHI’01 Extended Abstracts on Human Factors in Computing Systems; Association for Computing Machiner: New York, NY, USA, 2001; pp. 357–358. [Google Scholar] [CrossRef]
- Gibbs, J.K.; Gillies, M.; Pan, X. A comparison of the effects of haptic and visual feedback on presence in virtual reality. Int. J. Hum. Comput. Stud. 2022, 157, 102717. [Google Scholar] [CrossRef]
- Moon, H.S.; Orr, G.; Jeon, M. Hand tracking with vibrotactile feedback enhanced presence, engagement, usability, and performance in a virtual reality rhythm game. Int. J. Hum. Comput. Interact. 2023, 39, 2840–2851. [Google Scholar] [CrossRef]
- Li, S.; Tong, X.; Huang, J.; Wu, X.; Yang, W.; Pan, Z. A thermal and vibrational feedback glove based on the tactile characteristics of human hand skin. IEEE Access 2020, 8, 226671–226684. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).