
An Adaptive Multi-Objective Genetic Algorithm for Solving Heterogeneous Green City Vehicle Routing Problem



Abstract
1. Introduction
- (1)
- Introducing the novel concept of the heterogeneous green city VRPTW (HGCVRPTW), which incorporates multiple stakeholder interests and environmental considerations into the VRP framework;
- (2)
- Proposing an adaptive multi-objective genetic algorithm based on a greedy initialization strategy to solve the HGCVRPTW problem. This algorithm ensures efficient route planning while maintaining population diversity and accelerating convergence through adaptive multiple mutation operators;
- (3)
- Conducting experiments to demonstrate that our proposed algorithm can effectively solve the HGCVRPTW problem.
2. Related Works
2.1. Related Works of VRP
2.2. VRPTW
3. AMoGA-GIS
3.1. The Proposed HGCVRPTW Model
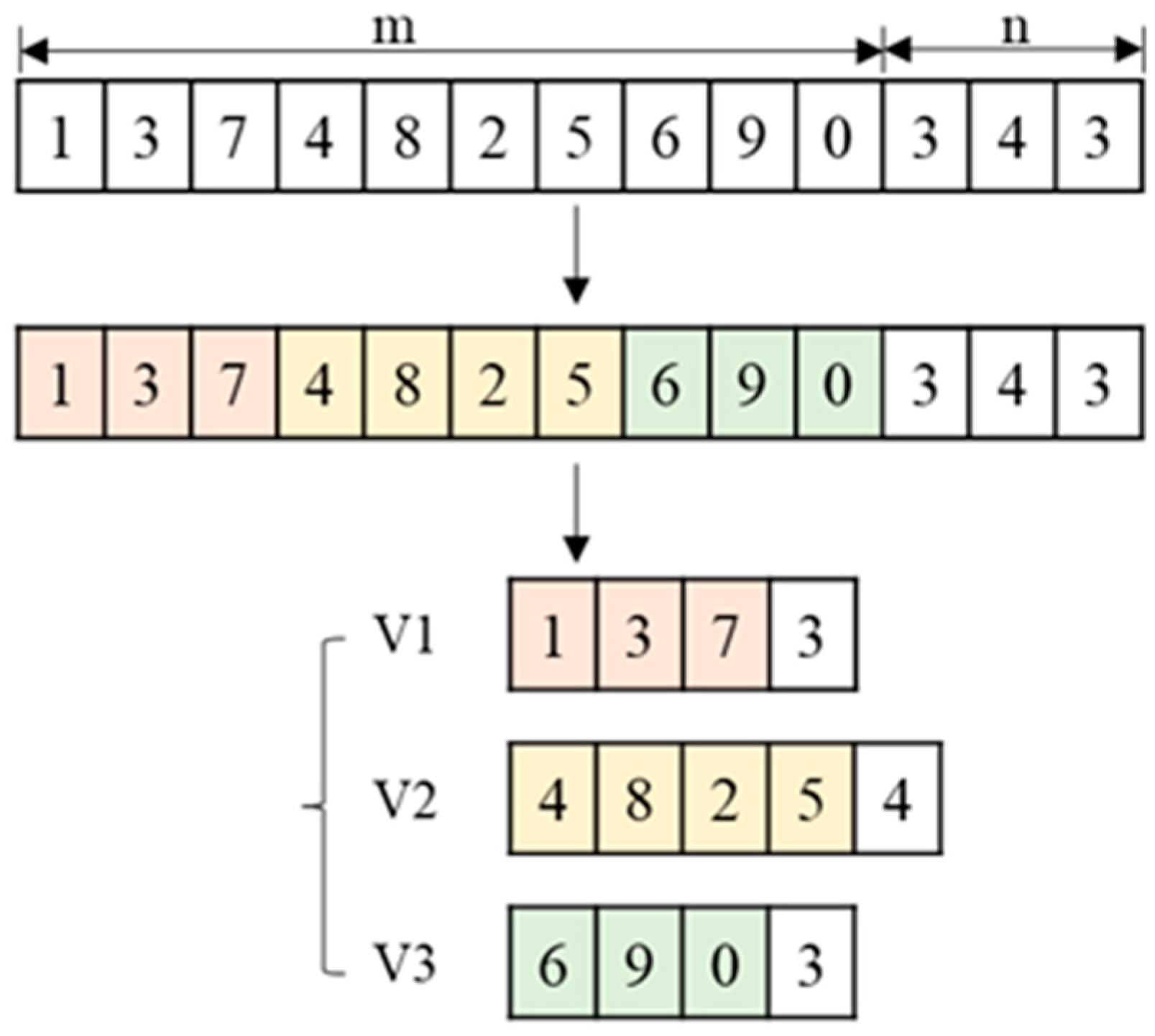
3.2. Solution Encoding
3.3. GIS
| Algorithm 1 GIS-Distance |
| Input: The position of spot pos, the positions of tasks tpos, the number of tasks m, the number of vehicles n, the capacities of vehicles capacity, the demands of tasks demand. Output: The individual generated by GIS-Distance allocation A |
| 1: A ← Φ 2: now_position ← pos 3: sequence ← [1, 2, …, m] 4: shuffle(sequence) 4: For index in sequence do 5: tmp_tasks←tpos[index] 6: list_index←Sort_distance(now_position, tmp_tasks) 7: For v in list_index do 8: If capacity[v] >= demand[index] then 9: capacity[v] ← capacity[v] − demand[index] 10: A[v] ← A[v]∪index 11: now_position[v] ← tpos[tmp_tasks] 12: End if 13: End for |
| 14: End for |
| Algorithm 2 GIS-Time |
| Input: The number of tasks m, the number of vehicles n, the capacities of vehicles capacity, the ready time of tasks Rtime, the due time of tasks Dtime, the demands of tasks demand. Output: The individual generated by GIS-Time allocation A |
| 1: A ← Φ 2: now_due_time ← 0 3: sequence ← [1, 2, …, m] 4: sequence←Sort_ready_time(sequence, Rtime) 5: For index in sequence do 6: p ←min_index(now_due_time) 7: A[p] ← A[p]∪index 8: now_due_time[p] ← Dtime[index] |
| 9: End for |
3.4. Crossover Operation
3.5. AMMO
3.6. The Complete AMoGA-GIS
| Algorithm 3 AMoGA-GIS |
| Input: The number of generation Gen, the size of population n. Output: The solutions set P |
| 1: P ← GIS(); 2: For i = 1 to Gen do 3: For j = 1 to n do 4: ind ← randint(n); 5: While ind == j 6: ind ← randint(n); // Randomly selecting individuals from the population 7: End while 8: v ← crossover(j, ind); // according to Section 3.4 9: u ← AMMO(v); // according to Section 3.5 10: P ←P∪u; 11: End for 12: Reallocate_probability(); // Reallocate the selection probabilities of mutation operators 13: Elimination of individuals with low Pareto grade; |
| 14: End for |
4. Experiments
4.1. Parameter Settings
4.2. Effectiveness of AMoGA-GIS
4.3. The Component Analysis
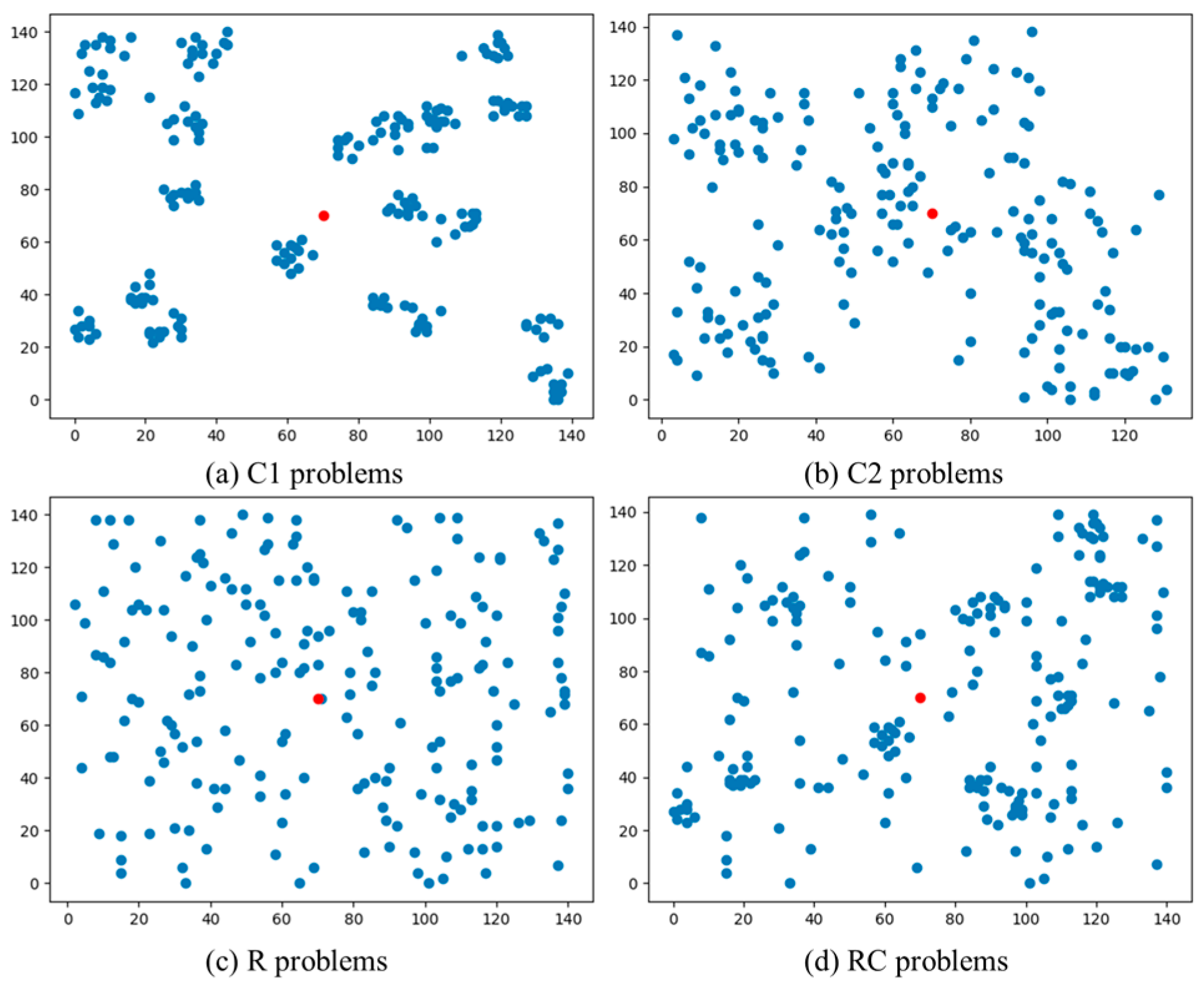
4.4. The Distribution of Solutions
5. Conclusions
6. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Crainic, T.G.; Ricciardi, N.; Storchi, G. Models for evaluating and planning city logistics systems. Transp. Sci. 2009, 43, 432–454. [Google Scholar] [CrossRef]
- Dantzig, G.B.; Ramser, J.H. The truck dispatching problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Cao, E.; Lai, M. The open vehicle routing problem with fuzzy demands. Expert Syst. Appl. 2010, 37, 2405–2411. [Google Scholar] [CrossRef]
- Lei, H.; Laporte, G.; Guo, B. The capacitated vehicle routing problem with stochastic demands and time windows. Comput. Oper. Res. 2011, 38, 1775–1783. [Google Scholar] [CrossRef]
- Balseiro, S.R.; Loiseau, I.; Ramonet, J. An ant colony algorithm hybridized with insertion heuristics for the time dependent vehicle routing problem with time windows. Comput. Oper. Res. 2011, 38, 954–966. [Google Scholar] [CrossRef]
- Solomon, M.M. Algorithms for the vehicle routing and scheduling problems with time window constraints. Oper. Res. 1987, 35, 254–265. [Google Scholar] [CrossRef]
- Prodhon, C.; Prins, C. Metaheuristics for vehicle routing problems. In Metaheuristics; Springer: Berlin/Heidelberg, Germany, 2016; pp. 407–437. [Google Scholar]
- Kaboudani, Y.; Ghodsypour, S.H.; Kia, H.; Shahmardan, A. Vehicle routing and scheduling in cross docks with forward and reverse logistics. Oper. Res. 2020, 20, 1589–1622. [Google Scholar] [CrossRef]
- Rajabi-Bahaabadi, M.; Shariat-Mohaymany, A.; Babaei, M.; Vigo, D. Reliable vehicle routing problem in stochastic networks with correlated travel times. Oper. Res. 2021, 21, 299–330. [Google Scholar] [CrossRef]
- Dablanc, L. Goods transport in large European cities: Difficult to organize, difficult to modernize. Transp. Res. Part A Policy Pract. 2007, 41, 280–285. [Google Scholar] [CrossRef]
- Konstantakopoulos, G.D.; Gayialis, S.P.; Kechagias, E.P. Vehicle routing problem and related algorithms for logistics distribution: A literature review and classification. Oper. Res. 2022, 22, 2033–2062. [Google Scholar] [CrossRef]
- Kim, G.; Ong, Y.S.; Heng, C.K.; Tan, P.S.; Zhang, N.A. City vehicle routing problem (City VRP): A review. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1654–1666. [Google Scholar] [CrossRef]
- Altabeeb, A.M.; Mohsen, A.M.; Ghallab, A. An improved hybrid firefly algorithm for capacitated vehicle routing problem. Appl. Soft Comput. 2019, 84, 105728. [Google Scholar] [CrossRef]
- Goksal, F.P.; Karaoglan, I.; Altiparmak, F. A hybrid discrete particle swarm optimization for vehicle routing problem with simultaneous pickup and delivery. Comput. Ind. Eng. 2013, 65, 39–53. [Google Scholar] [CrossRef]
- Wang, C.; Mu, D.; Zhao, F.; Sutherland, J.W. A parallel simulated annealing method for the vehicle routing problem with simultaneous pickup–delivery and time windows. Comput. Ind. Eng. 2015, 83, 111–122. [Google Scholar] [CrossRef]
- Schneider, M.; Stenger, A.; Goeke, D. The electric vehicle-routing problem with time windows and recharging stations. Transp. Sci. 2014, 48, 500–520. [Google Scholar] [CrossRef]
- Dedović, U.; Gušavac, B.A. Optimal vehicle routing in consumer goods distribution: A gnu linear programming kit-based analysis. Acadlore Trans. Appl. Math. Stat. 2023, 1, 87–95. [Google Scholar] [CrossRef]
- Wang, J.; Weng, T.; Zhang, Q. A two-stage multiobjective evolutionary algorithm for multiobjective multidepot vehicle routing problem with time windows. IEEE Trans. Cybern. 2019, 49, 2467–2478. [Google Scholar] [CrossRef] [PubMed]
- Srivastava, G.; Singh, A.; Mallipeddi, R. NSGA-II with objective-specific variation operators for multiobjective vehicle routing problem with time windows. Expert Syst. Appl. 2021, 176, 114779. [Google Scholar] [CrossRef]
- Kuo, R.J.; Luthfiansyah, M.F.; Masruroh, N.A.; Zulvia, F.E. Application of improved multi-objective particle swarm optimization algorithm to solve disruption for the two-stage vehicle routing problem with time windows. Expert Syst. Appl. 2023, 225, 120009. [Google Scholar] [CrossRef]
- Mukherjee, P.; Ramanathan, A.; Dey, S. Efficient vehicle routing problem: A machine learning and evolutionary computation approach. In Proceedings of the Companion Conference on Genetic and Evolutionary Computation (GECCO ‘23 Companion), Lisbon, Portugal, 15–19 July 2023; ACM: New York, NY, USA, 2023; pp. 3–4. [Google Scholar]
- Azadi, A.H.S.; Khalilzadeh, M.; Antucheviciene, J.; Heidari, A.; Soon, A. A sustainable multi-objective model for capacitated-electric-vehicle-routing-problem considering hard and soft time windows as well as partial recharging. Biomimetics 2024, 9, 242. [Google Scholar] [CrossRef]
- Gülmez, B.; Emmerich, M.; Fan, Y. Multi-objective optimization for green delivery routing problems with flexible time windows. Appl. Artif. Intell. 2024, 38, 2325302. [Google Scholar] [CrossRef]
- Huang, G.; Qi, Y.; Cai, Y.; Luo, Y.; Huang, H. A grey wolf optimizer algorithm for multi-objective cumulative capacitated vehicle routing problem considering operation time. Biomimetics 2024, 9, 331. [Google Scholar] [CrossRef] [PubMed]
- Khoo, T.S.; Mohammad, B.B. The parallelization of a two-phase distributed hybrid ruin-and-recreate genetic algorithm for solving multi-objective vehicle routing problem with time windows. Expert Syst. Appl. 2021, 168, 114408. [Google Scholar] [CrossRef]
- Costa, J.G.C.; Mei, Y.; Zhang, M.J. Learning to select initialisation heuristic for vehicle routing problems. In Proceedings of the Genetic and Evolutionary Computation Conference (GECCO ‘23), Lisbon, Portugal, 15–19 July 2023; ACM: New York, NY, USA, 2023; pp. 266–274. [Google Scholar]
- Deb, K.; Jain, H. An evolutionary many-objective optimization algorithm using reference-point-based nondominated sorting approach, part I: Solving problems with box constraints. IEEE Trans. Evol. Comput. 2013, 18, 577–601. [Google Scholar] [CrossRef]
- Gehring and Homberger. Extended SOLOMON’s VRPTW Instances. 1999. Available online: https://www.sintef.no/projectweb/top/vrptw/homberger-benchmark/ (accessed on 22 July 2024).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Func | IGD | HV | Func | IGD | HV | ||||
|---|---|---|---|---|---|---|---|---|---|
| NSGAIII | AMoGA-GIS | NSGAIII | AMoGA-GIS | NSGAIII | AMoGA-GIS | NSGAIII | AMoGA-GIS | ||
| C1_1 | 6.05 × 105 | 5.03 × 105 | 1.08 × 1012 | 3.76 × 1012 | R_1 | 7.28 × 105 | 5.44 × 105 | 2.51 × 1011 | 1.48 × 1012 |
| C1_2 | 7.90 × 105 | 4.32 × 105 | 4.72 × 1011 | 6.29 × 1012 | R_2 | 6.36 × 105 | 4.58 × 105 | 4.74 × 1011 | 2.41 × 1012 |
| C1_3 | 7.14 × 105 | 5.46 × 105 | 3.44 × 1011 | 2.65 × 1012 | R_3 | 4.68 × 105 | 3.76 × 105 | 1.11 × 1012 | 1.63 × 1012 |
| C1_4 | 7.64 × 105 | 4.92 × 105 | 2.92 × 1011 | 2.38 × 1012 | R_4 | 6.59 × 105 | 5.23 × 105 | 1.80 × 1011 | 1.37 × 1012 |
| C1_5 | 8.10 × 105 | 6.00 × 105 | 1.10 × 1012 | 6.14 × 1012 | R_5 | 6.78 × 105 | 4.73 × 105 | 3.51 × 1011 | 2.46 × 1012 |
| C1_6 | 9.25 × 105 | 6.56 × 105 | 4.11 × 1011 | 5.72 × 1012 | R_6 | 5.74 × 105 | 4.13 × 105 | 1.13 × 1012 | 3.67 × 1012 |
| C1_7 | 4.90 × 105 | 3.59 × 105 | 5.46 × 1011 | 1.91 × 1012 | R_7 | 8.20 × 105 | 5.41 × 105 | 1.76 × 1011 | 2.05 × 1012 |
| C1_8 | 7.33 × 105 | 6.37 × 105 | 6.55 × 1011 | 1.81 × 1012 | R_8 | 5.54 × 105 | 4.90 × 105 | 7.11 × 1011 | 1.47 × 1012 |
| C1_9 | 6.21 × 105 | 5.43 × 105 | 2.13 × 1012 | 3.00 × 1012 | R_9 | 5.29 × 105 | 4.22 × 105 | 2.13 × 1011 | 6.48 × 1011 |
| C1_10 | 8.07 × 105 | 5.00 × 105 | 5.94 × 1011 | 6.75 × 1012 | R_10 | 6.01 × 105 | 3.86 × 105 | 4.14 × 1011 | 3.27 × 1012 |
| C2_1 | 2.40 × 105 | 1.46 × 105 | 1.73 × 1012 | 5.48 × 1012 | RC_1 | 4.15 × 105 | 2.69 × 105 | 1.45 × 1012 | 3.02 × 1012 |
| C2_2 | 2.43 × 105 | 5.38 × 104 | 1.70 × 1012 | 4.70 × 1012 | RC_2 | 6.16 × 105 | 2.61 × 105 | 1.08 × 1012 | 9.35 × 1012 |
| C2_3 | 5.64 × 105 | 3.98 × 105 | 1.31 × 1012 | 6.70 × 1012 | RC_3 | 6.27 × 105 | 6.72 × 105 | 2.34 × 1012 | 2.56 × 1012 |
| C2_4 | 1.21 × 105 | 1.80 × 105 | 3.00 × 1012 | 5.18 × 1012 | RC_4 | 4.02 × 105 | 2.71 × 105 | 2.88 × 1011 | 1.42 × 1012 |
| C2_5 | 4.34 × 105 | 1.97 × 105 | 1.76 × 1012 | 7.91 × 1012 | RC_5 | 4.71 × 105 | 2.33 × 105 | 1.50 × 1012 | 7.27 × 1012 |
| C2_6 | 8.53 × 105 | 6.43 × 105 | 1.17 × 1012 | 4.72 × 1012 | RC_6 | 5.98 × 105 | 4.10 × 105 | 4.24 × 1011 | 3.88 × 1012 |
| C2_7 | 8.99 × 105 | 8.19 × 105 | 1.80 × 1012 | 7.67 × 1012 | RC_7 | 5.52 × 105 | 4.03 × 105 | 1.31 × 1012 | 2.79 × 1012 |
| C2_8 | 3.24 × 105 | 1.30 × 105 | 2.12 × 1012 | 7.55 × 1012 | RC_8 | 6.51 × 105 | 3.74 × 105 | 1.04 × 1012 | 7.23 × 1012 |
| C2_9 | 6.40 × 105 | 3.59 × 105 | 1.97 × 1012 | 9.86 × 1012 | RC_9 | 5.39 × 105 | 3.30 × 105 | 6.79 × 1011 | 3.30 × 1012 |
| C2_10 | 7.52 × 105 | 5.75 × 105 | 2.80 × 1011 | 3.92 × 1012 | RC_10 | 6.01 × 105 | 5.22 × 104 | 8.48 × 1011 | 2.93 × 1012 |
| results | (19/0/1) | (20/0/0) | results | (19/1/0) | (20/0/0) | ||||
| avg | 6.16 × 105 | 4.38 × 105 | 1.22 × 1012 | 5.21 × 1012 | avg | 5.86 × 105 | 3.95 × 105 | 7.98 × 1011 | 3.21 × 1012 |
| better | 28.88% | 325.52% | better | 32.58% | 302.08% | ||||
| Func | IGD | HV | ||||||
|---|---|---|---|---|---|---|---|---|
| NSGAIII | NSGAIII-GIS | MoGA-GIS | AMoGA-GIS | NSGAIII | NSGAIII-GIS | MoGA-GIS | AMoGA-GIS | |
| C1_1 | * 6.05 × 105 | 7.48 × 105 | 4.91 × 105 | 5.03 × 105 | * 1.08 × 1012 | 3.49 × 1011 | 3.40 × 1012 | 3.76 × 1012 |
| C1_2 | 7.90 × 105 | * 6.08 × 105 | 4.63 × 105 | 4.32 × 105 | * 4.72 × 1011 | 2.38 × 1012 | 5.77 × 1012 | 6.29 × 1012 |
| C1_3 | 7.14 × 105 | * 6.57 × 105 | 5.56 × 105 | 5.46 × 105 | 3.44 × 1011 | * 1.13 × 1012 | 1.52 × 1012 | 2.65 × 1012 |
| C1_4 | 7.64 × 105 | * 6.50 × 105 | 5.46 × 105 | 4.92 × 105 | 2.92 × 1011 | * 1.00 × 1012 | 1.84 × 1012 | 2.38 × 1012 |
| C1_5 | * 8.10 × 105 | 8.81 × 105 | 6.00 × 105 | 5.07 × 105 | * 1.10 × 1012 | 6.78 × 1011 | 5.60 × 1012 | 6.14 × 1012 |
| C1_6 | 9.25 × 105 | * 7.32 × 105 | 6.78 × 105 | 6.56 × 105 | 4.11 × 1011 | * 3.62 × 1012 | 3.91 × 1012 | 5.72 × 1012 |
| C1_7 | * 4.90 × 105 | 4.98 × 105 | 3.43 × 105 | 3.59 × 105 | * 5.46 × 1011 | 2.37 × 1011 | 1.15 × 1012 | 1.91 × 1012 |
| C1_8 | * 7.33 × 105 | 7.63 × 105 | 5.62 × 105 | 6.37 × 105 | 6.55 × 1011 | * 7.89 × 1011 | 2.16 × 1012 | 1.81 × 1012 |
| C1_9 | * 6.21 × 105 | 7.77 × 105 | 5.58 × 105 | 5.43 × 105 | * 2.13 × 1012 | 6.55 × 1011 | 4.15 × 1012 | 3.00 × 1012 |
| C1_10 | 8.07 × 105 | * 7.23 × 105 | 5.56 × 105 | 5.00 × 105 | 5.94 × 1011 | * 1.13 × 1012 | 5.33 × 1012 | 6.75 × 1012 |
| C2_1 | * 2.40 × 105 | 3.62 × 105 | 2.15 × 105 | 1.46 × 105 | * 1.73 × 1012 | 1.29 × 1012 | 5.39 × 1012 | 5.48 × 1012 |
| C2_2 | 2.43 × 105 | * 8.42 × 105 | 1.73 × 104 | 5.38 × 104 | 1.70 × 1012 | * 5.32 × 1012 | 5.79 × 1012 | 4.70 × 1012 |
| C2_3 | * 5.64 × 105 | 6.94 × 105 | 4.85 × 105 | 3.98 × 105 | 1.31 × 1012 | * 1.33 × 1012 | 6.35 × 1012 | 6.70 × 1012 |
| C2_4 | 1.21 × 105 | * 6.85 × 104 | 1.45 × 105 | 1.80 × 105 | * 3.00 × 1012 | 8.61 × 1011 | 4.00 × 1012 | 5.18 × 1012 |
| C2_5 | 4.34 × 105 | * 3.02 × 105 | 1.83 × 105 | 1.97 × 105 | 1.76 × 1012 | * 6.66 × 1012 | 8.92 × 1012 | 7.91 × 1012 |
| C2_6 | 8.53 × 105 | * 7.49 × 105 | 5.49 × 105 | 6.43 × 105 | 1.17 × 1012 | * 3.63 × 1012 | 6.20 × 1012 | 4.72 × 1012 |
| C2_7 | 8.99 × 105 | * 8.58 × 105 | 7.99 × 105 | 8.19 × 105 | 1.80 × 1012 | * 3.35 × 1012 | 6.41 × 1012 | 7.67 × 1012 |
| C2_8 | 3.24 × 105 | * 2.52 × 105 | 1.98 × 105 | 1.30 × 105 | 2.12 × 1012 | * 4.88 × 1012 | 7.22 × 1012 | 7.55 × 1012 |
| C2_9 | 6.40 × 105 | * 5.63 × 105 | 2.79 × 105 | 3.59 × 105 | 1.97 × 1012 | * 2.62 × 1012 | 1.25 × 1013 | 9.86 × 1012 |
| C2_10 | 7.52 × 105 | * 6.73 × 105 | 6.40 × 105 | 5.75 × 105 | 2.80 × 1011 | * 2.34 × 1012 | 2.84 × 1012 | 3.92 × 1012 |
| R_1 | * 7.28 × 105 | 7.36 × 105 | 5.17 × 105 | 5.44 × 105 | * 2.51 × 1011 | 1.87 × 1011 | 1.87 × 1012 | 1.48 × 1012 |
| R_2 | * 6.36 × 105 | 7.08 × 105 | 4.85 × 105 | 4.58 × 105 | * 4.74 × 1011 | 2.88 × 1011 | 2.01 × 1012 | 2.41 × 1012 |
| R_3 | * 4.68 × 105 | 5.52 × 105 | 3.93 × 105 | 3.76 × 105 | * 1.11 × 1012 | 2.62 × 1011 | 1.54 × 1012 | 1.63 × 1012 |
| R_4 | 6.59 × 105 | * 6.30 × 105 | 5.48 × 105 | 5.23 × 105 | 1.80 × 1011 | * 5.65 × 1011 | 1.03 × 1012 | 1.37 × 1012 |
| R_5 | 6.78 × 105 | * 6.46 × 105 | 4.36 × 105 | 4.73 × 105 | 3.51 × 1011 | * 4.18 × 1011 | 2.15 × 1012 | 2.46 × 1012 |
| R_6 | * 5.74 × 105 | 6.70 × 105 | 4.63 × 105 | 4.13 × 105 | 1.13 × 1012 | * 1.82 × 1011 | 2.46 × 1012 | 3.67 × 1012 |
| R_7 | 8.20 × 105 | * 7.57 × 105 | 5.96 × 105 | 5.41 × 105 | 1.76 × 1011 | * 4.26 × 1011 | 1.82 × 1012 | 2.05 × 1012 |
| R_8 | * 5.54 × 105 | 6.86 × 105 | 4.12 × 105 | 4.90 × 105 | * 7.11 × 1011 | 1.93 × 1011 | 2.37 × 1012 | 1.47 × 1012 |
| R_9 | 5.29 × 105 | * 4.67 × 105 | 4.40 × 105 | 4.22 × 105 | 2.13 × 1011 | * 2.59 × 1011 | 6.38 × 1011 | 6.48 × 1011 |
| R_10 | * 6.01 × 105 | * 6.01 × 105 | 3.90 × 105 | 3.86 × 105 | * 4.14 × 1011 | 3.59 × 1011 | 2.92 × 1012 | 3.27 × 1012 |
| RC_1 | * 2.69 × 105 | 4.52 × 105 | 2.89 × 105 | 4.15 × 105 | 1.45 × 1012 | * 6.72 × 1011 | 1.73 × 1012 | 3.02 × 1012 |
| RC_2 | 6.16 × 105 | * 5.15 × 105 | 3.91 × 105 | 2.61 × 105 | 1.08 × 1012 | * 1.91 × 1012 | 7.14 × 1012 | 9.35 × 1012 |
| RC_3 | * 6.27 × 105 | 7.54 × 105 | 6.69 × 105 | 6.72 × 105 | * 2.34 × 1012 | 4.23 × 1011 | 1.80 × 1012 | 2.56 × 1012 |
| RC_4 | 4.02 × 105 | * 3.99 × 105 | 2.12 × 105 | 2.71 × 105 | 2.88 × 1011 | * 4.01 × 1011 | 2.09 × 1012 | 1.42 × 1012 |
| RC_5 | * 4.71 × 105 | * 4.75 × 105 | 2.91 × 105 | 2.33 × 105 | 1.50 × 1012 | * 1.86 × 1012 | 5.30 × 1012 | 7.27 × 1012 |
| RC_6 | 5.98 × 105 | * 5.00 × 105 | 3.43 × 105 | 4.10 × 105 | * 4.24 × 1011 | 1.45 × 1012 | 3.32 × 1012 | 3.88 × 1012 |
| RC_7 | * 5.52 × 105 | 5.92 × 105 | 2.99 × 105 | 4.03 × 105 | 1.31 × 1012 | * 6.28 × 1011 | 4.43 × 1012 | 2.79 × 1012 |
| RC_8 | 6.51 × 105 | * 4.61 × 105 | 3.62 × 105 | 3.74 × 105 | 1.04 × 1012 | * 3.29 × 1012 | 5.23 × 1012 | 7.23 × 1012 |
| RC_9 | 5.39 × 105 | * 3.53 × 105 | 3.11 × 105 | 3.30 × 105 | 6.79 × 1011 | * 3.44 × 1012 | 5.12 × 1012 | 3.30 × 1012 |
| RC_10 | 4.61 × 105 | * 3.72 × 105 | 1.57 × 105 | 5.22 × 104 | 8.48 × 1011 | * 1.50 × 1012 | 4.55 × 1012 | 2.93 × 1012 |
| avg | 5.94 × 105 | 5.65 × 105 | 4.22 × 105 | 4.18 × 105 | 1.01 × 1012 | 1.57 × 1012 | 4.00 × 1012 | 4.21 × 1012 |
| better | 29.62% | 26.01% | 0.86% | 0% | 316.26% | 167.32% | 5.21% | 0% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, W.; Bian, X.; Mei, X. An Adaptive Multi-Objective Genetic Algorithm for Solving Heterogeneous Green City Vehicle Routing Problem. Appl. Sci. 2024, 14, 6594. https://doi.org/10.3390/app14156594
Zhao W, Bian X, Mei X. An Adaptive Multi-Objective Genetic Algorithm for Solving Heterogeneous Green City Vehicle Routing Problem. Applied Sciences. 2024; 14(15):6594. https://doi.org/10.3390/app14156594
Chicago/Turabian StyleZhao, Wanqiu, Xu Bian, and Xuesong Mei. 2024. "An Adaptive Multi-Objective Genetic Algorithm for Solving Heterogeneous Green City Vehicle Routing Problem" Applied Sciences 14, no. 15: 6594. https://doi.org/10.3390/app14156594
APA StyleZhao, W., Bian, X., & Mei, X. (2024). An Adaptive Multi-Objective Genetic Algorithm for Solving Heterogeneous Green City Vehicle Routing Problem. Applied Sciences, 14(15), 6594. https://doi.org/10.3390/app14156594