
Simulation-Based Prediction of the Cold Start Behavior of Gerotor Pumps for Precise Design of Electric Oil Pumps
 ,
,
Abstract
:1. Introduction
- Develop a systematic method that allows a holistic and fast simulation of the pump at every operating point with temperatures ranging from °C to °C with oils typical for the application and corresponding viscosities.
- Study the behavior of a gerotor pump at low temperatures ( °C to °C).
- Validate the method with intensive testing in a climate chamber.
2. Methods in Context of Product Development
3. Models for Gerotor Pumps
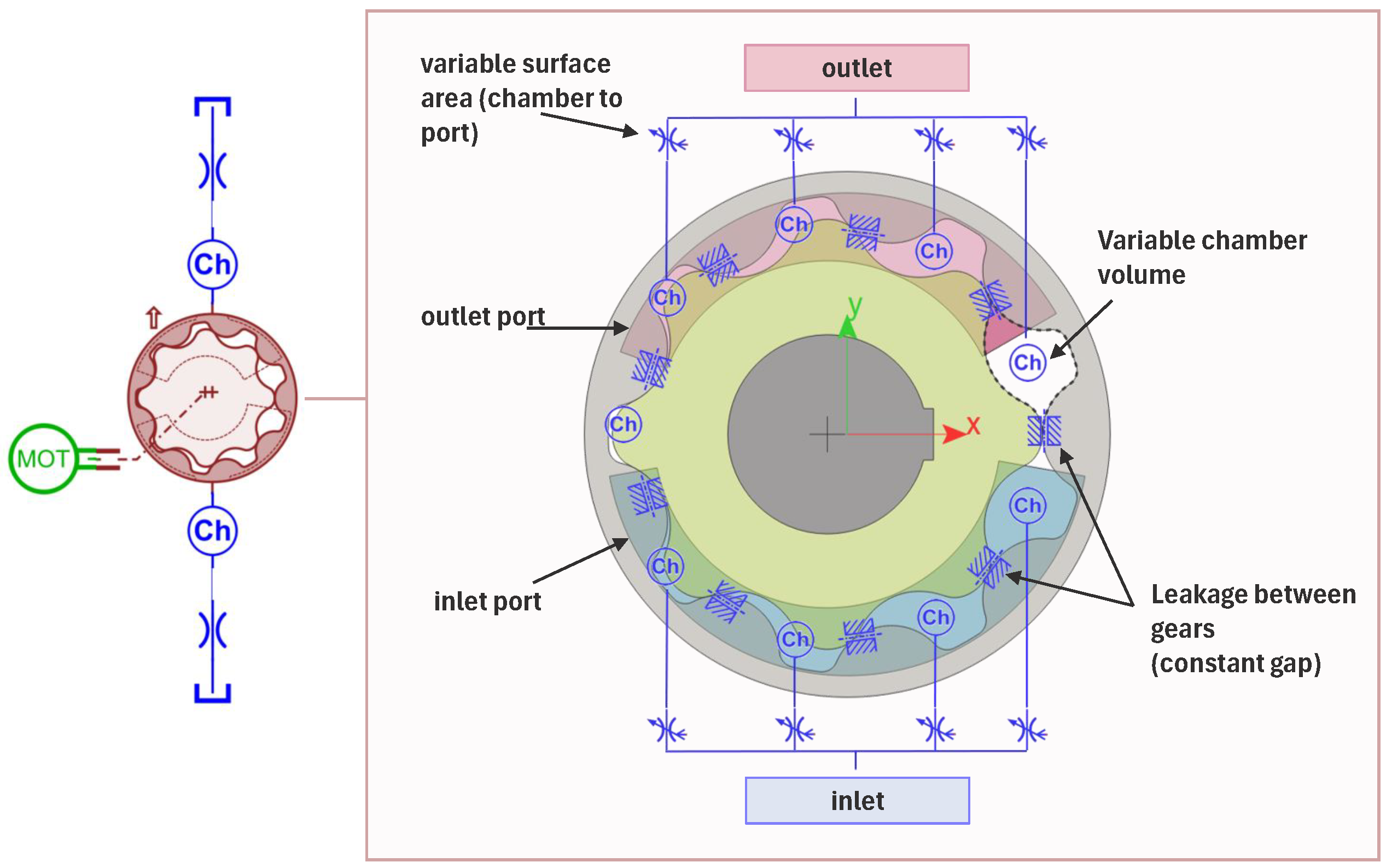
3.1. State of the Art Gerotor Pump Models
- is the flow coefficient (function of the flow regime). This value can be estimated from CFD calculations or measurements. The value is here set to 0.7, based on the authors’ experience.
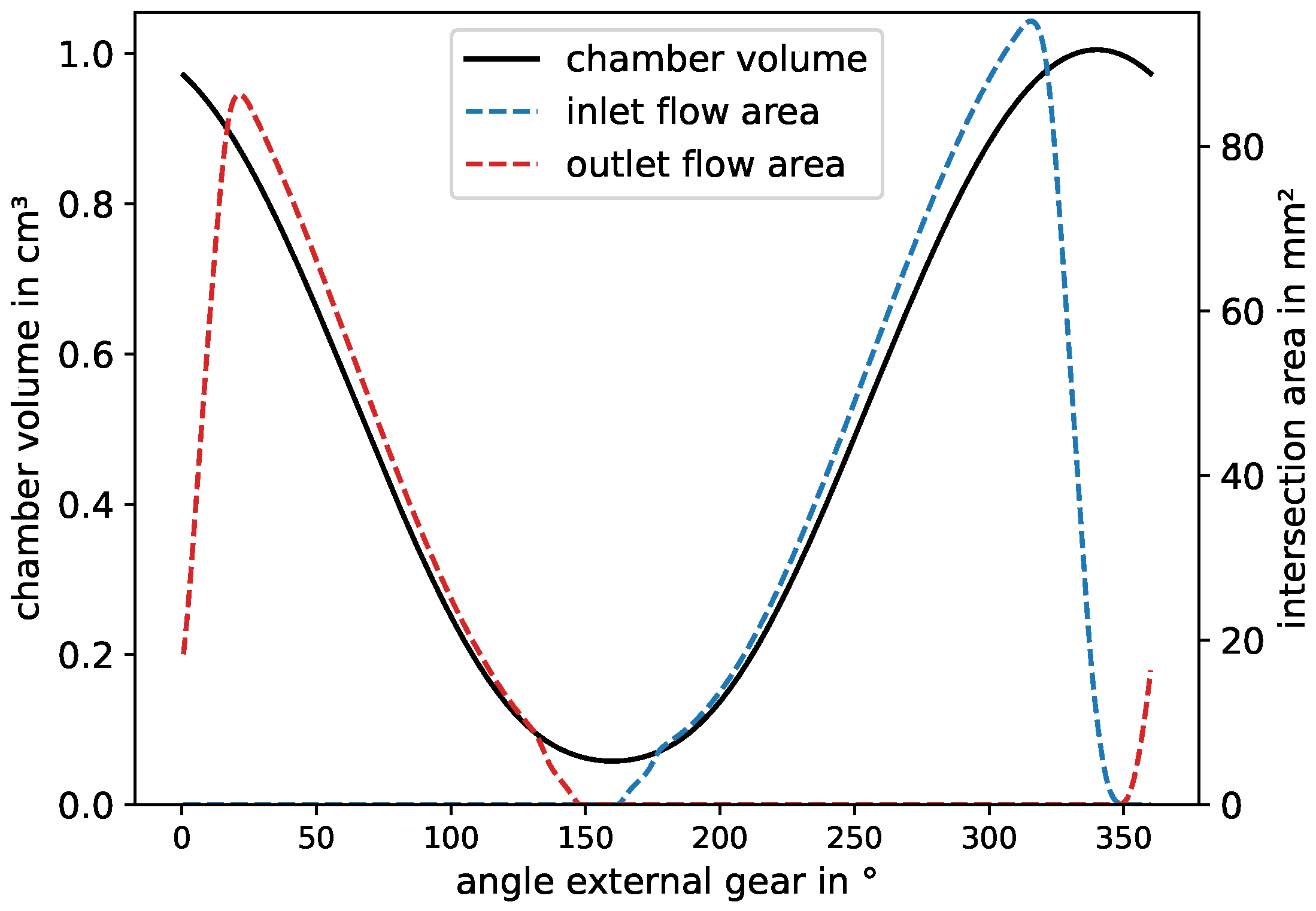
- A is the flow area (function of chamber position and geometries of gears and ports).
- is the pressure drop across the orifice.
- is the oil density.
- is the pressure drop across the leakage.
- b is the gears’ thickness.
- is the clearance between the inner and outer teeth.
- is the oil absolute viscosity.
- l is the gap length.
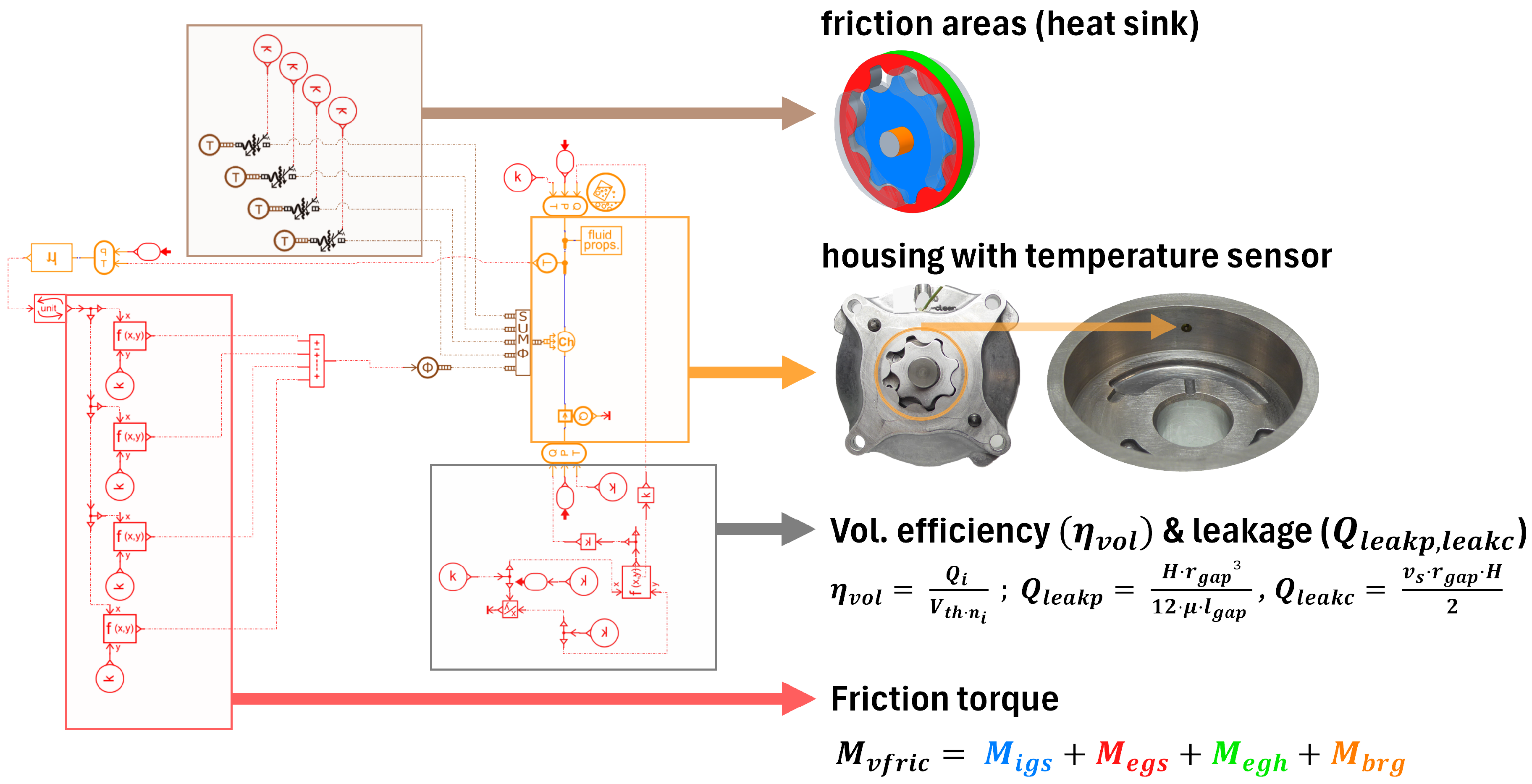
- the viscous friction torque between the inner gear sides and the housing.
- the viscous friction torque between the outer gear sides and the housing.
- the viscous friction torque between the outer gear cylindrical surface and the housing.
- the viscous friction torque at the shaft bearing.
- The rotating speed of gears is fixed and the flow is stationary.
- The flow is only tangential (no radial or axial velocity).
- The tangential velocity only depends on radial and axial coordinates.
- There is no pressure gradient; the flow is only driven by viscous forces induced by the rotation of gears.
3.2. Validation of Gerotor Pump Template
3.3. Modeling the Viscous Friction Heating
4. Results
5. Discussion
6. Conclusions
- By identifying and understanding previously observed deviations in the pump performance predictions at low temperatures and high viscosities, the present study provides a basis for an accurate simulation and prediction of the pump behavior at various conditions ranging from °C to °C by the developed novel approach for calculating the viscous friction.
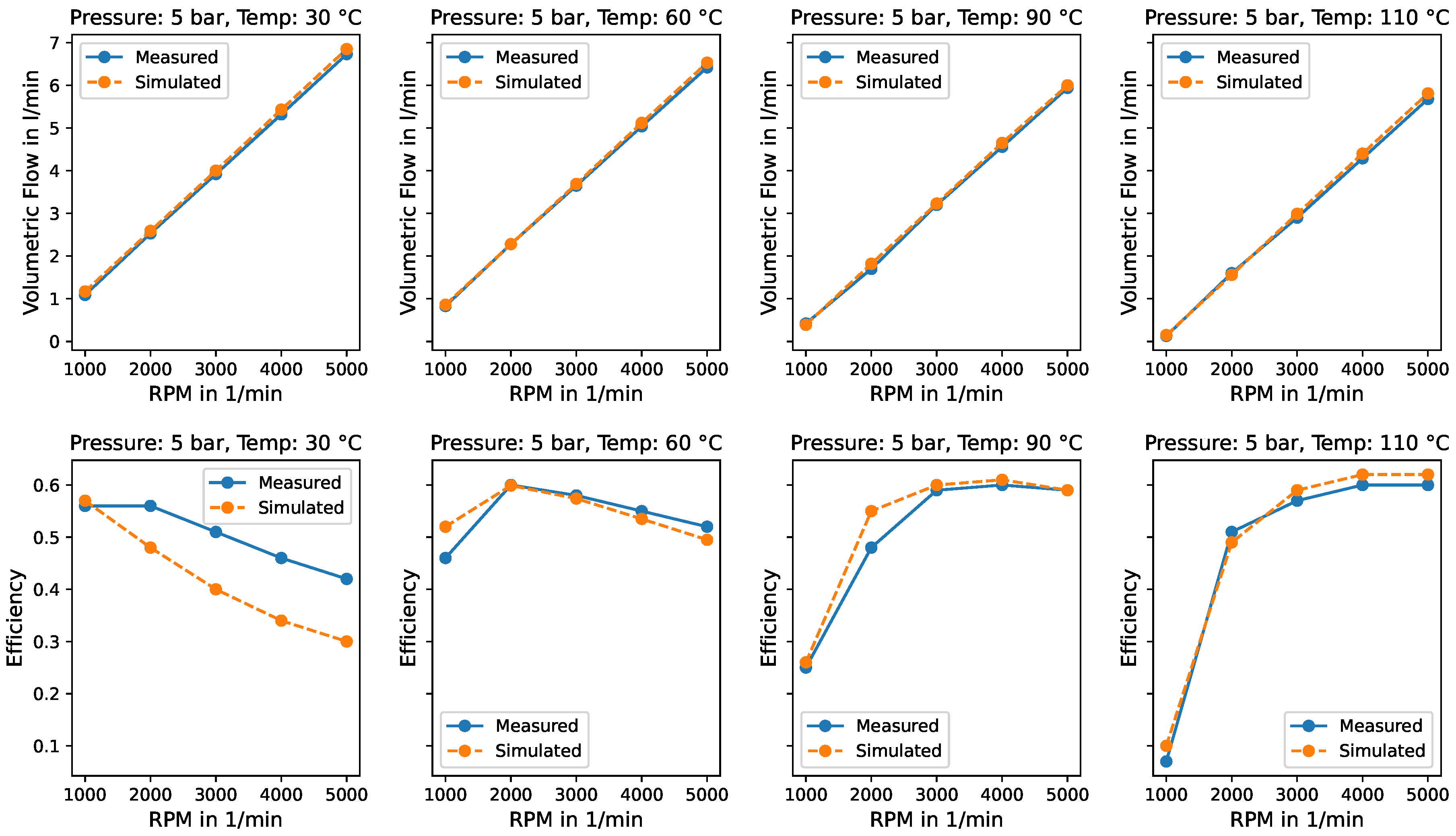
- The development of such a powerful and experimentally validated simulation environment represents a significant step forward and provides high accuracy and confidence when compared to laboratory measurements, especially in terms of volumetric flow rate (<5%), pump torque and efficiency (<7%) at different temperature and viscosity conditions over a wide speed range (1000–5000 rpm) and different system pressures (0.5–5 bar).
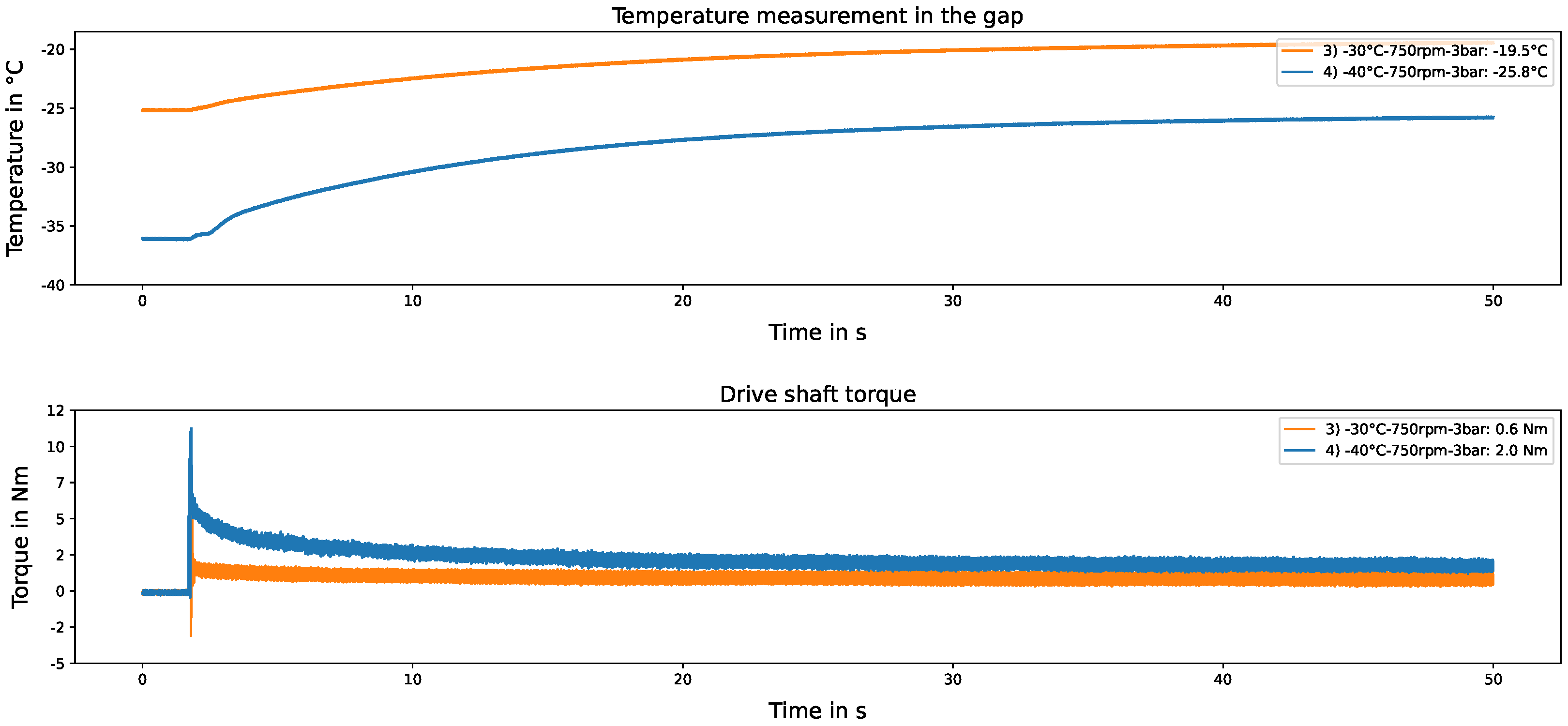
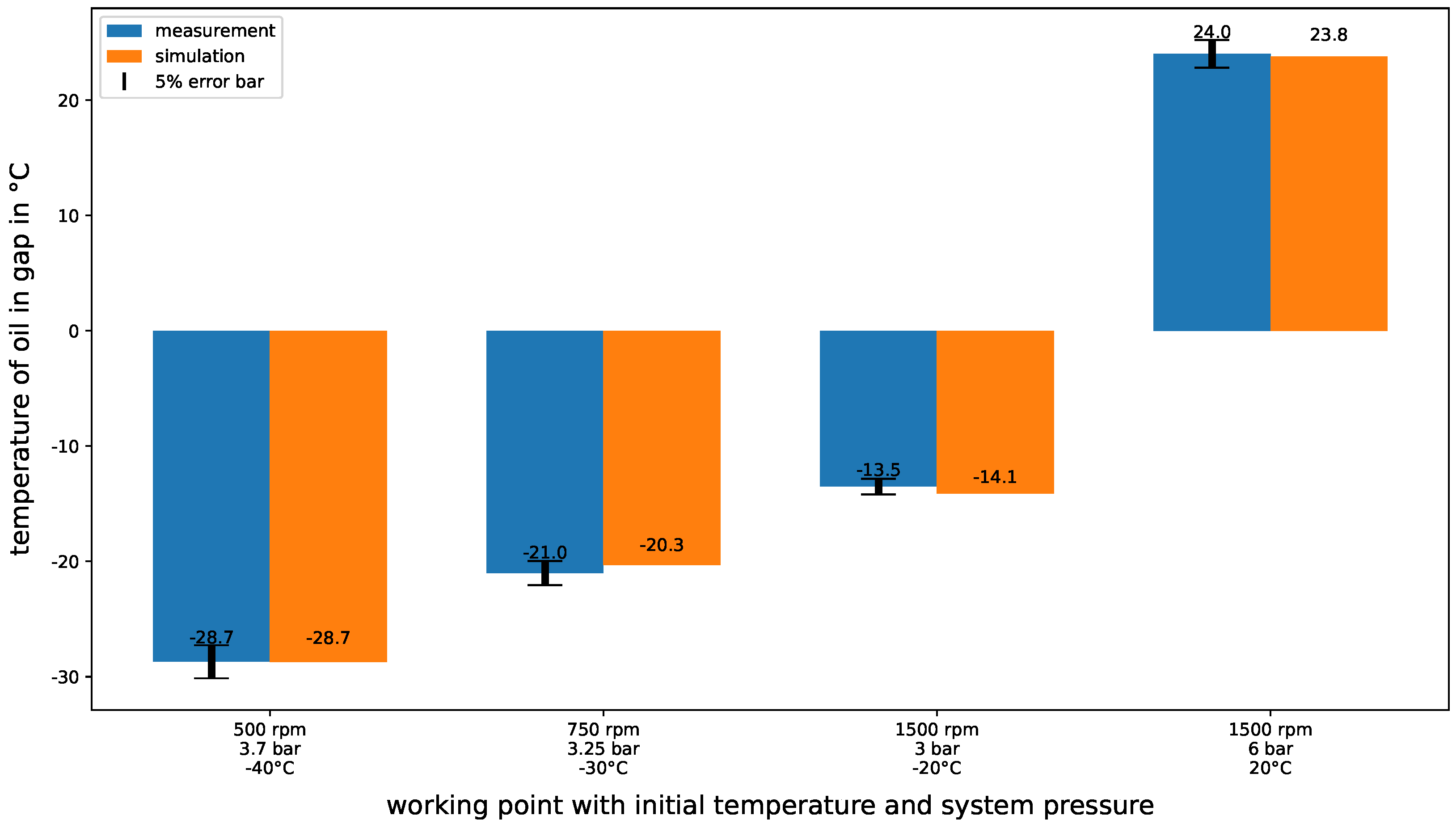
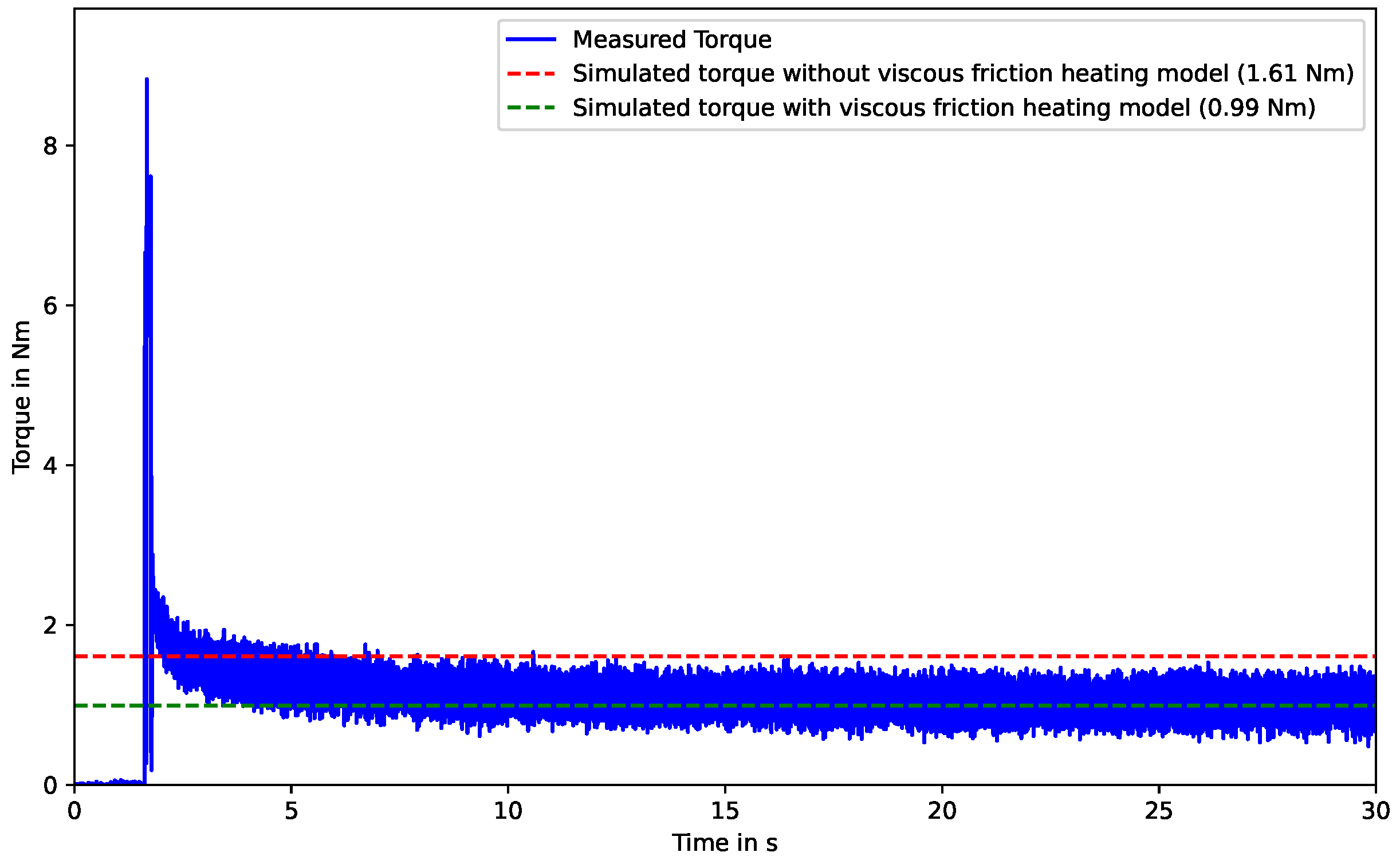
- In addition, the study presented a novel method for simulating the cold start behavior of the pump at the steady state operating point. This simulation-based method was developed and validated by measurements in a climate chamber, demonstrating its practical applicability and potential for real-world applications. In particular, the accuracy of the prediction of the temperature in the gap between the outer gear and the pump housing (<5%) and the accurate prediction of the steady-state torque (see Figure 16) should be highlighted. However, the need to further generalize the method to apply it to a wider range of pumps and conditions in future research is clearly stated and discussed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| BEV | Battery electric vehicle |
| CFD | Computational fluid dynamics |
| FEM | Finite element method |
| GHZ | Gümbel–Hersey number |
| digital DNA | in analogy to the notion of DNA in biology, a digital and machine-executable design representation, which, due its knowledge content and generation power, is the decisive part of the future assets in an engineering company |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| number of teeth inner gear | 7 |
| number of teeth outer gear | 8 |
| outer diameter of external gear | 31 mm |
| shaft diameter | 10 mm |
| gear width | 8 mm |
| radial gap between gears | 0.06 mm |
| radial gap outer gear and pump housing | 0.1 mm |
| axial gap gears and pump housing | 0.04 mm |
| theoretical flow rate | 1.4 |
Appendix B
| v | L | h | ||||||
|---|---|---|---|---|---|---|---|---|
| 0 | 1 | 2 | −3 | −1 | 1 | 1 | 1 | |
| 1 | 0 | 0 | 1 | 1 | 1 | 0 | 0 | |
| −3 | −1 | −2 | 0 | −1 | −3 | 0 | 0 | |
| −1 | 0 | −1 | 0 | 0 | −1 | 0 | 0 |
Appendix C
| Level | Error in % | Model | |||
|---|---|---|---|---|---|
| 1 | 92.748 | - | - | - | |
| 2 | 92.418 | - | - | - | |
| 2 | 93.466 | - | - | - | |
| 2 | 100.000 | - | - | - | |
| 3 | 36.928 | 0.1395 | - | - | |
| 3 | 50.476 | 0.4809 | - | - | |
| 3 | 91.458 | 0.75 | - | - | |
| 3 | 95.767 | - | - | - | |
| 4 | 25.356 | 0.1832 | - | - | |
| 4 | 26.645 | −0.8129 | - | - | |
| 4 | 27.711 | −1.76 | - | - | |
| 4 | 27.713 | 0.1714 | - | - | |
| 5 | 24.033 | 0.232 | 0.0579 | - | |
| 5 | 25.390 | −0.0485 | −3.80 | - | |
| 5 | 25.390 | 0.1843 | −0.0485 | - | - |
| 5 | 25.770 | 0.1823 | - | - | |
| 6 | 13.418 | 0.0003988 | 0.6909 | - | |
| 6 | 13.466 | 0.6901 | 0.0003987 | - | |
| 6 | 16.386 | −3.536 × 10−4 | - | - | |
| 6 | 17.738 | 0.1206 | −4.578 × 10−4 | - | |
| 7 | 13.184 | 0.0003831 | 0.6823 | - | |
| 7 | 13.332 | 0.0003947 | 0.6881 | - | |
| 7 | 13.344 | 3.977 × 10−4 | −0.3081 | - | |
| 8 | 13.203 | 0.000457 | 0.6787 | 0.9785 | |
| 8 | 13.206 | −3.915 × 10−4 | −0.3122 | - | |
| 8 | 13.290 | −3.922 × 10−4 | −0.3133 | - | |
| 8 | 13.343 | 5.477 × 10−4 | 0.7469 | - | |
| 9 | 12.803 | 2.170 × 10−4 | 0.5571 | −0.0091 | |
| 9 | 12.923 | 0.0005202 | 0.6673 | 0.9591 |
Appendix D
References
- Trends in Electric Cars–Global EV Outlook 2024–Analysis. Available online: https://www.iea.org/reports/global-ev-outlook-2024/trends-in-electric-cars (accessed on 10 June 2024).
- Gannesh, V.; Sivakumar, R.; Sakthivel, G. Fixed Displacement Gerotor Oil Pump (FDOP): A Survey. Int. J. Ambient Energy 2022, 43, 2328–2338. [Google Scholar] [CrossRef]
- Fauda, A.; Marchetti, L.; Cola Lng, F.; Arena Lng, L. Innovative Electric Oil Pumps for Different Automotive Applications. In Proceedings of the Conference on Sustainable Mobility, Catania, Italy, 4–7 October 2020. [Google Scholar] [CrossRef]
- Ha, T.; Kang, Y.; Kim, N.S.; Park, S.H.; Lee, S.H.; Kim, D.K.; Ryou, H.S. Cooling Effect of Oil Cooling Method on Electric Vehicle Motors with Hairpin Winding. J. Mech. Sci. Technol. 2021, 35, 407–415. [Google Scholar] [CrossRef]
- Wrobel, R. A Technology Overview of Thermal Management of Integrated Motor Drives—Electrical Machines. Therm. Sci. Eng. Prog. 2022, 29, 101222. [Google Scholar] [CrossRef]
- SHW AG. Variable Motorölpumpe. Available online: https://www.shw.de/de/produkte/pkw/ (accessed on 12 June 2023).
- Grabow, G. Optimalbereiche von Fluidenergiemaschinen-Pumpen und Verdichter. Forsch. Ingenieurwesen 2002, 67, 100–106. [Google Scholar] [CrossRef]
- Ivanović, L.; Matejić, M. Improving Gerotor Pump Performance Trough Design, Modeling and Simulation. Int. J. Fluid Power 2021, 21, 327–346. [Google Scholar] [CrossRef]
- Pellegri, M.; Manne, V.H.B.; Vacca, A. A Simulation Model of Gerotor Pumps Considering Fluid–Structure Interaction Effects: Formulation and Validation. Mech. Syst. Signal Process. 2020, 140, 106720. [Google Scholar] [CrossRef]
- Ivanović, L.; Devedžić, G.; Ćuković, S.; Mirić, N. Modeling of the Meshing of Trochoidal Profiles With Clearances. J. Mech. Des. 2012, 134, 041003. [Google Scholar] [CrossRef]
- Yoshida, N.; Kagawa, H. Development of a Low-Torque Electric Oil Pump for Cooling of BEV Motors. Jtekt Eng. J. Engl. Ed. 2022, 1018E, 90–95. [Google Scholar]
- Rundo, M. Models for Flow Rate Simulation in Gear Pumps: A Review. Energies 2017, 10, 1261. [Google Scholar] [CrossRef]
- Vasudevan, D.B.; Turaga, V.K. CFD Analysis of Cavitation in Flow through a Gerotor Pump and the Prediction of Erosion Zone Due to Cavitation. In Proceedings of the AeroCON 2024, Bangalore, India, 6–7 June 2024. [Google Scholar] [CrossRef]
- Taghizadeh, S.; Ng, K.C.; Horen, J.; Dhar, S. A 3D Computational Fluid Dynamics and Acoustics Simulation Approach for Noise Mitigation Prediction in Gerotor Pumps. In Proceedings of the WCX SAE World Congress Experience, Detroit, MI, USA, 18–20 April 2024. [Google Scholar] [CrossRef]
- Pareja-Corcho, J.; Pedrera-Busselo, A.; Ciarrusta, J.; Moreno, A.; Posada, J.; Ruiz-Salguero, O. Accelerating the Design of Gerotor Pumps Using Interactive Tools and Fast Simulation. Int. J. Interact. Des. Manuf. (IJIDeM) 2024, 1–14. [Google Scholar] [CrossRef]
- Pareja-Corcho, J.C.; Pedrera-Busselo, A.; Ciarrusta, J.; Moreno, A.; Ruiz-Salguero, O.; Posada, J. On Web Digital Twins: An Use Case for a Gerotor Pump. In Proceedings of the 28th International ACM Conference on 3D Web Technology, San Sebastian, Spain, 9–11 October 2023; pp. 1–8. [Google Scholar] [CrossRef]
- Totaro, G.; Zardin, B.; Borghi, M.; Scolari, F. Modelling of a Gerotor Pump Including the Evaluation of the Micro-Movements of the External Gear. J. Phys. Conf. Ser. 2023, 2648, 012049. [Google Scholar] [CrossRef]
- Pellegri, M.; Vacca, A.; Frosina, E.; Buono, D.; Senatore, A. Numerical Analysis and Experimental Validation of Gerotor Pumps: A Comparison between a Lumped Parameter and a Computational Fluid Dynamics-Based Approach. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2017, 231, 4413–4430. [Google Scholar] [CrossRef]
- Hussain, T.; Udaya Kumar, M.; Sarangi, N.; Sivaramakrishna, M. A Study on Effect of Operating Conditions on Gerotor Pump Performance. Def. Sci. J. 2022, 72, 146–150. [Google Scholar] [CrossRef]
- Ivanović, L. Design, Modeling and Simulation of Gearing for Improving Gerotor Pump Performance. In Advances in Hydraulic and Pneumatic Drives and Control 2020; Stryczek, J., Warzyńska, U., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 15–27. [Google Scholar] [CrossRef]
- Shin, C.; Lee, S.; Kim, C. Optimal Ovoid Lobe Shape by an Automatic Calculation Program and CFD Using Dynamic Mesh Technique. Int. J. Adv. Manuf. Technol. 2024, 132, 5367–5383. [Google Scholar] [CrossRef]
- Harrison, J.; Aihara, R.; Eisele, F. Modeling Gerotor Oil Pumps in 1D to Predict Performance with Known Operating Clearances. SAE Int. J. Engines 2016, 9, 1839–1846. [Google Scholar] [CrossRef]
- Yanada, H.; Uchino, T.; Takeno, T.; Kojima, R.; Yokoyama, H. Rotor Behavior and Friction Torque Characteristics of a Gerotor Pump Used for Automatic Transmissions. J. Dyn. Syst. Meas. Control 2021, 143, 121001. [Google Scholar] [CrossRef]
- Schumacher, S.; Schmid, S.; Wieser, P.; Stetter, R.; Till, M. Design, Simulation and Optimization of an Electrical Drive-Train. Vehicles 2021, 3, 390–405. [Google Scholar] [CrossRef]
- Hahn, N.; Rudolph, S. Digitale Durchgängigkeit, Konsistenz und Interoperabilität im Produktlebenszyklus mit graphenbasierten Entwurfssprachen. In Proceedings of the Automation 2023, Baden-Baden, Germany, 27–28 June 2023; Volume 2419, pp. 443–458. [Google Scholar]
- Design Cockpit 43. IILS Ingenieurgesellschaft für Intelligente Lösungen und Systeme mbH: Trochtelfingen, Germany. Available online: https://www.iils.de/ (accessed on 20 June 2024).
- Gamez-Montero, P.J.; Codina, E.; Castilla, R. A Review of Gerotor Technology in Hydraulic Machines. Energies 2019, 12, 2423. [Google Scholar] [CrossRef]
- Simcenter Amesim. Siemens Digital Industries Software: Plano, TX, USA. Available online: https://plm.sw.siemens.com/en-US/simcenter/systems-simulation/amesim/ (accessed on 20 June 2024).
- Li, L.; Xu, P.; Xu, W.; Lu, B.; Wang, C.; Tan, D. Multi-field coupling vibration patterns of the multiphase sink vortex and distortion recognition method. Mech. Syst. Signal Process. 2024, 219, 111624. [Google Scholar] [CrossRef]
- Tan, Y.; Ni, Y.; Xu, W.; Xie, Y.; Li, L.; Tan, D. Key technologies and development trends of the soft abrasive flow finishing method. J. Zhejiang Univ.-Sci. A 2023, 24, 1043–1064. [Google Scholar] [CrossRef]
- Klopsch, V.; Germann, T.; Seitz, H. Numerical Simulation of Low-Pulsation Gerotor Pumps for Use in the Pharmaceutical Industry and in Biomedicine. Curr. Dir. Biomed. Eng. 2015, 1, 433–436. [Google Scholar] [CrossRef]
- Matlab. The MathWorks, Inc.: Natick, MA, USA. Available online: https://www.mathworks.com/products/matlab.html?s_tid=hp_products_matlab (accessed on 20 June 2024).
- van Basshuysen, R.; Schäfer, F.; Ingenieurgesellschaft Auto und Verkehr (Eds.) Handbuch Verbrennungsmotor: Grundlagen, Komponenten, Systeme, Perspektiven, 8th überarbeitete auflage ed.; ATZ/MTZ-Fachbuch; Springer Vieweg: Wiesbaden, Germany, 2017. [Google Scholar] [CrossRef]
- Fabiani, M.; Mancò, S.; Nervegna, N.; Rundo, M.; Armenio, G.; Pachetti, C.; Trichilo, R. Modelling and Simulation of Gerotor Gearing in Lubricating Oil Pumps. In Proceedings of the International Congress & Exposition, Detroit, MI, USA, 1–4 March 1999. [Google Scholar] [CrossRef]
- McCloy, D.; Martin, H. Control of Fluid Power: Analysis and Design; Ellis Horwood Series in Engineering Science; E. Horwood: Bel Air, CA, USA, 1980. [Google Scholar]
- Mancò, S.; Nervegna, N.; Rundo, M.; Armenio, G.; Pachetti, C.; Trichilo, R. Gerotor Lubricating Oil Pump for IC Engines. In Proceedings of the International Fall Fuels and Lubricants Meeting and Exposition, San Francisco, CA, USA, 19–22 October 1998; SAE International: Warrendale, PA, USA, 1998. [Google Scholar] [CrossRef]
- Matthies, H.J.; Renius, K.T. Einführung in die Ölhydraulik: Für Studium und Praxis: 110 Kurzaufgaben mit Lösungshinweisen, 9th vollständig überarbeitete und erweiterte Auflage ed.; Springer Vieweg: Wiesbaden, Germany, 2021. [Google Scholar]
- Bender, B.; Göhlich, D. (Eds.) Dubbel Taschenbuch für den Maschinenbau 2: Anwendungen, 26th überarbeitete Auflage ed.; Springer Vieweg: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Ligier, J.L. Lubrification Des Paliers Moteurs; Publications de l’Institut Français Du Pétrole, Editions Technip: Paris, France, 1997. [Google Scholar]
- Findeisen, D.; Helduser, S. Ölhydraulik: Handbuch der hydraulischen Antriebe und Steuerungen; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar] [CrossRef]
- Piton, M.; Huchet, F.; Cazacliu, B.; Le Corre, O. Heat Transport in Rotating Annular Duct: A Short Review. Energies 2022, 15, 8633. [Google Scholar] [CrossRef]
- Incropera, F.P.; DeWitt, D.P.; Bergman, T.L.; Lavine, A.S. (Eds.) Principles of Heat and Mass Transfer, 7th ed.; International Student Version; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Dirker, J.; Meyer, J.P. Convective Heat Transfer Coefficients in Concentric Annuli. Heat Transf. Eng. 2005, 26, 38–44. [Google Scholar] [CrossRef]
- Anselment, M.; Neumaier, M.; Rudolph, S. Von Daten zu physikalischen Modellen mit Methoden der Künstlichen Intelligenz. In Proceedings of the DLRK Stuttgart, Stuttgart, Germany, 19–21 September 2023. [Google Scholar]
- Anselment, M.; Neumaier, M.; Rudolph, S. Symbolic Regression: Systematically Spanning and Searching the Space of Dimensionally Homogeneous Symbolic Models Using a Tree Search. Ceas Aeronaut. J. 2024. under review. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schumacher, S.; Stetter, R.; Till, M.; Laviolette, N.; Algret, B.; Rudolph, S. Simulation-Based Prediction of the Cold Start Behavior of Gerotor Pumps for Precise Design of Electric Oil Pumps. Appl. Sci. 2024, 14, 6723. https://doi.org/10.3390/app14156723
Schumacher S, Stetter R, Till M, Laviolette N, Algret B, Rudolph S. Simulation-Based Prediction of the Cold Start Behavior of Gerotor Pumps for Precise Design of Electric Oil Pumps. Applied Sciences. 2024; 14(15):6723. https://doi.org/10.3390/app14156723
Chicago/Turabian StyleSchumacher, Sven, Ralf Stetter, Markus Till, Nicolas Laviolette, Benoît Algret, and Stephan Rudolph. 2024. "Simulation-Based Prediction of the Cold Start Behavior of Gerotor Pumps for Precise Design of Electric Oil Pumps" Applied Sciences 14, no. 15: 6723. https://doi.org/10.3390/app14156723