

Performance of Strengthened Accelerated Oscillator Damper for Vibration Control of Bridges

 , ,
, , 
Abstract
1. Introduction
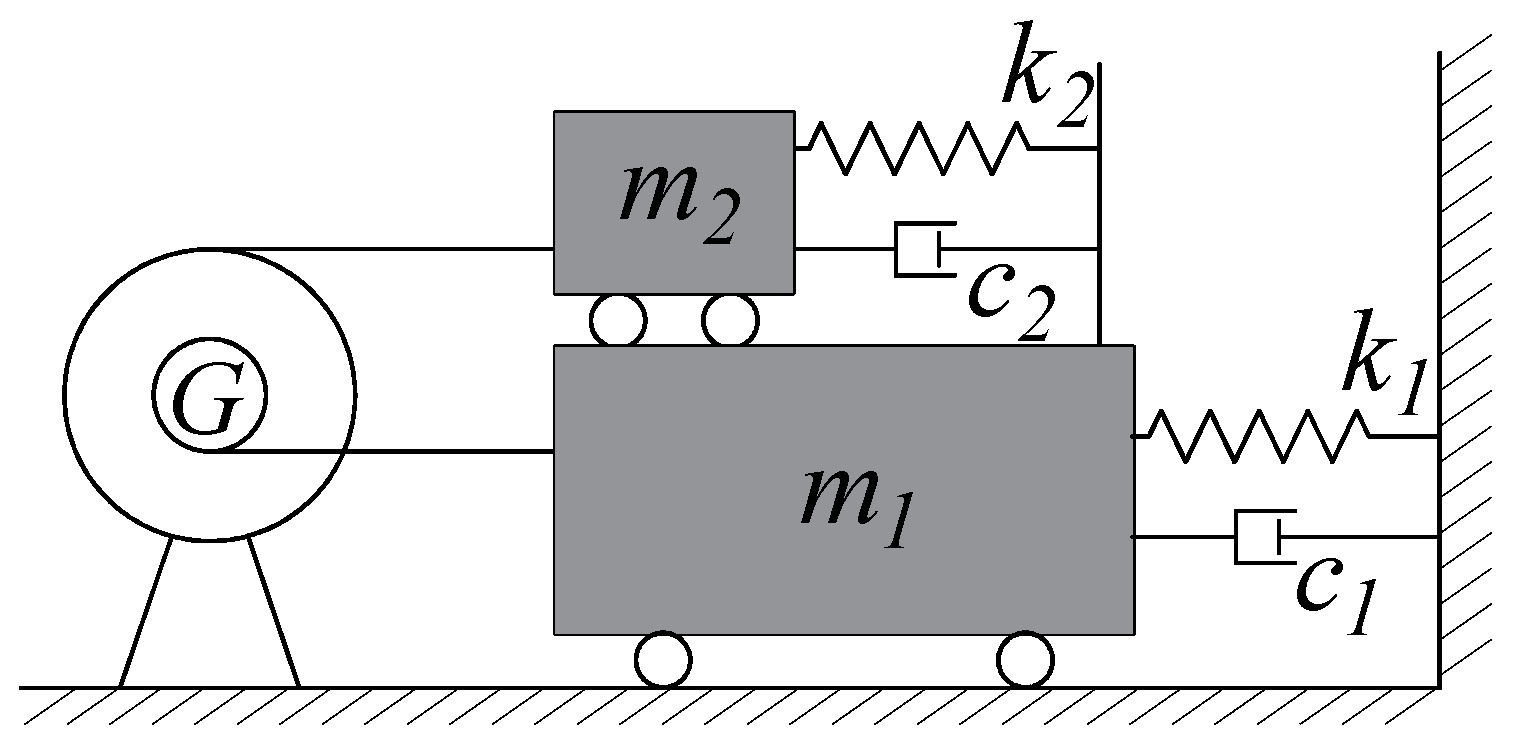
2. Topological Configuration and Motion Equations of the SAOD-LS
2.1. Topological Configuration of SAOD-LS
2.2. Derivation and Analytical Solution of the Motion Equation for SAOD-LS
2.3. Validation of SAOD-LS Motion Equation and Its Performance Comparison with AOD
3. Composition and Working Principle of the NSD
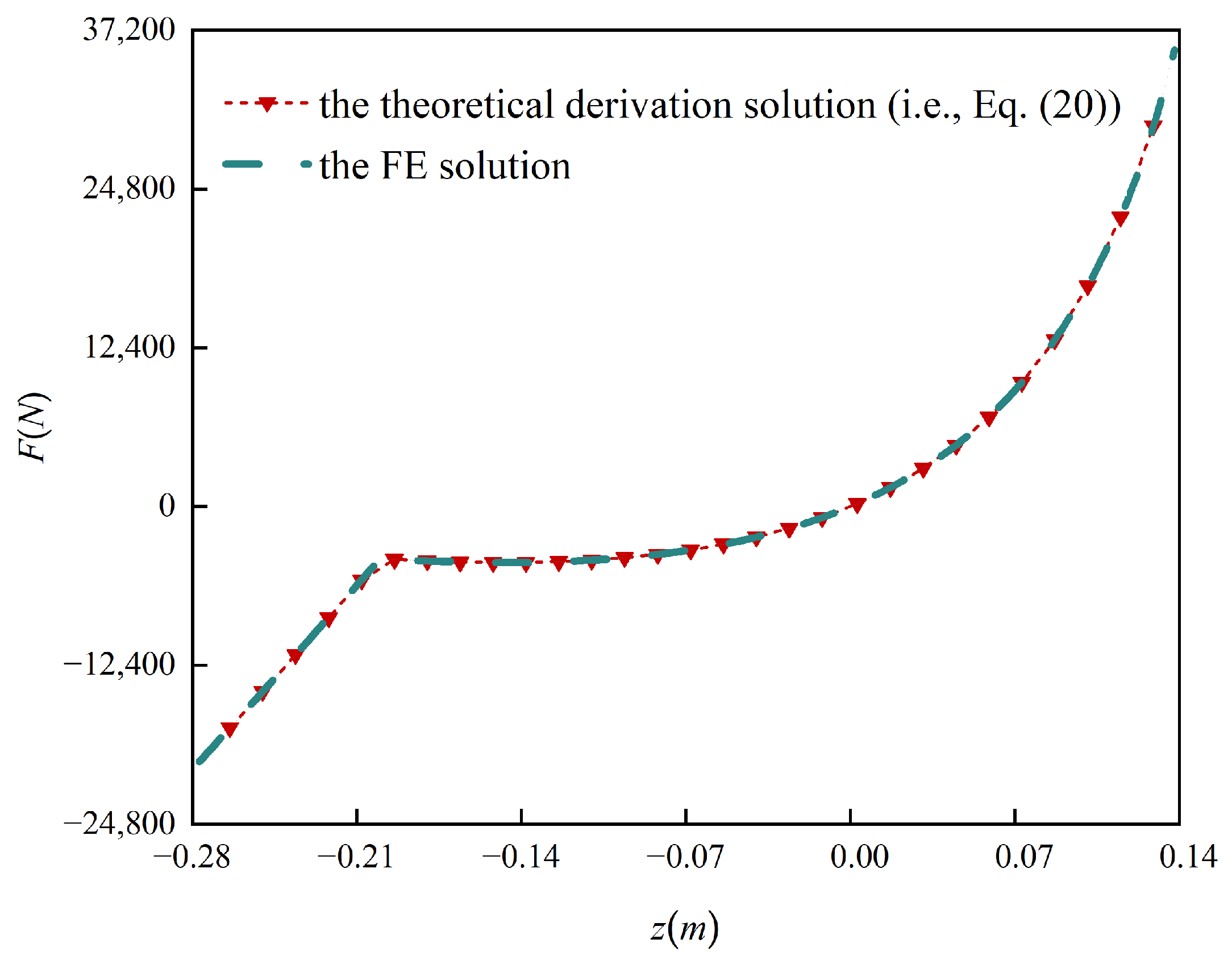
3.1. Components and Derivation of Constitutive Equation for NSD
3.2. Verification of the Functional Relationship between F and z
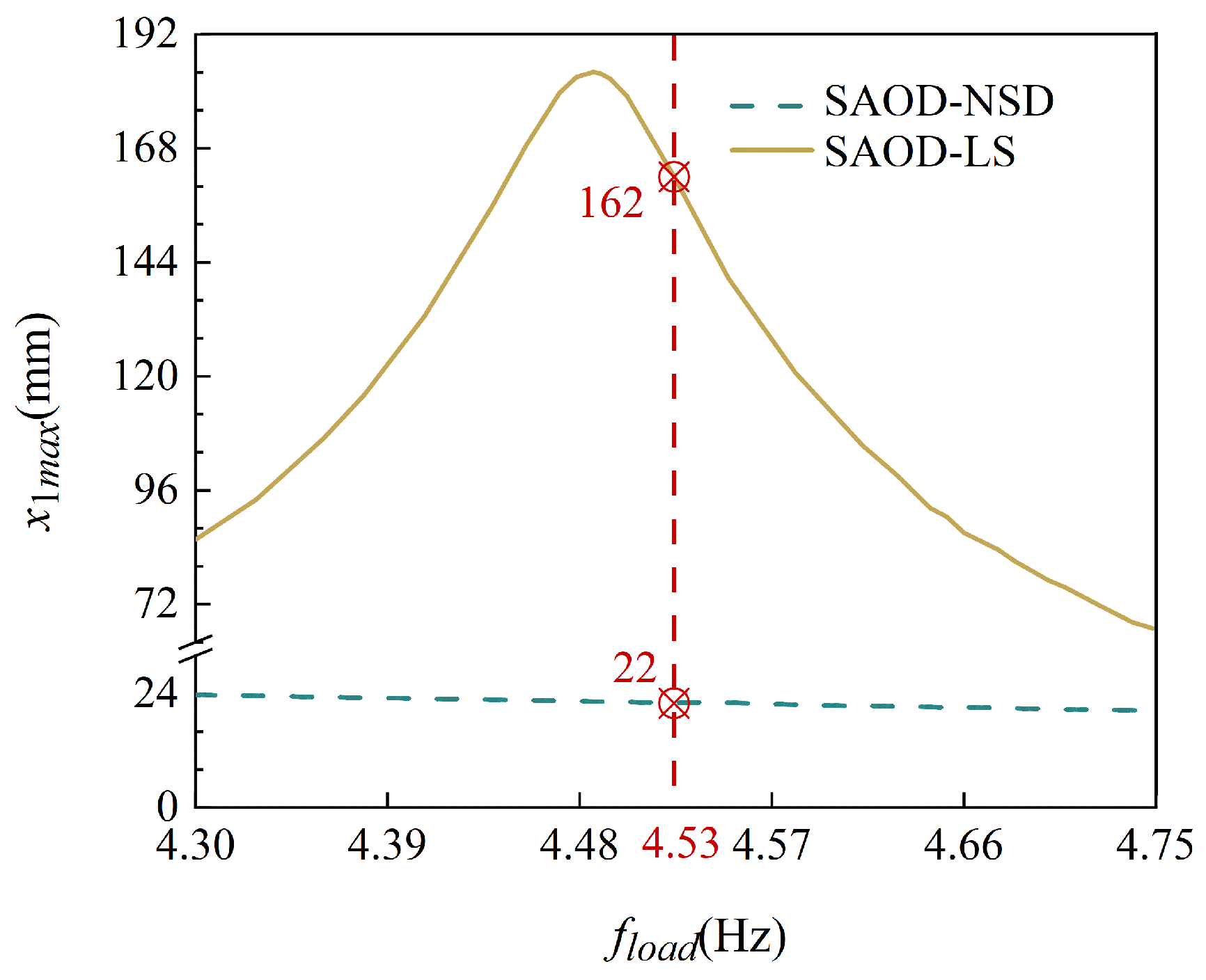
4. Comparison of Shock Absorption Performance between SAOD-NSD and SAOD-LS
5. Damping Performance of SAOD-LS and SAOD-NSD in an Actual Bridge Example
6. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tabatabai, S.M.; Tabatabai, F.A.-S. Integrating Inverse Data Envelopment Analysis and Machine Learning for Enhanced Road Transport Safety in Iran. J. Soft Comput. Civ. Eng. 2024, 8, 141–160. [Google Scholar] [CrossRef]
- Zhang, G.; Liu, Y.; Liu, J.; Lan, S.; Yang, J. Causes and Statistical Characteristics of Bridge Failures: A Review. J. Traffic Transp. Eng. 2022, 9, 388–406. [Google Scholar] [CrossRef]
- Kronprasert, N.; Boontan, K.; Kanha, P. Crash Prediction Models for Horizontal Curve Segments on Two-Lane Rural Roads in Thailand. Sustainability 2021, 13, 9011. [Google Scholar] [CrossRef]
- Morfidis, K.; Kostinakis, K. Rapid Prediction of Seismic Incident Angle’s Influence on the Damage Level of RC Buildings Using Artificial Neural Networks. Appl. Sci. 2022, 12, 1055. [Google Scholar] [CrossRef]
- Morfidis, K.; Stefanidou, S.; Markogiannaki, O. A Rapid Seismic Damage Assessment (RASDA) Tool for RC Buildings Based on an Artificial Intelligence Algorithm. Appl. Sci. 2023, 13, 5100. [Google Scholar] [CrossRef]
- Kostinakis, K.; Morfidis, K.; Demertzis, K.; Iliadis, L. Classification of Buildings’ Potential for Seismic Damage Using a Machine Learning Model with Auto Hyperparameter Tuning. Eng. Struct. 2023, 290, 116359. [Google Scholar] [CrossRef]
- Konar, T. Seismic Vibration Control of a Building by Overhead Water Tank Designed as Slender Tuned Sloshing Damper. Pract. Period. Struct. Des. Constr. 2024, 29, 04023069. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, B. Research on Smart Control Tests of Ice-induced Vibration Control of Offshore Platform. In Proceedings of the 2010 International Conference on Intelligent Control and Information Processing, Dalian, China, 13–15 August 2010; pp. 342–347. [Google Scholar] [CrossRef]
- Sun, Z.; Zou, Z.; Ying, X.; Li, X. Tuned Mass Dampers for Wind-induced Vibration Control of Chongqi Bridge. J. Bridge Eng. 2020, 25, 05019014. [Google Scholar] [CrossRef]
- Hawryszków, P.; Pimentel, R.; Silva, R.; Silva, F. Vertical Vibrations of Footbridges Due to Group Loading: Effect of Pedestrian–Structure Interaction. Appl. Sci. 2021, 11, 1355. [Google Scholar] [CrossRef]
- Bedon, C.; Santos, F.A. Effect of Spring-Mass-Damper Pedestrian Models on the Performance of Low-Frequency or Lightweight Glazed Floors. Appl. Sci. 2023, 13, 4023. [Google Scholar] [CrossRef]
- Huang, Z.; Shi, X.; Mu, D.; Huang, X.; Tong, W. Performance and Optimization of a Dual-Stage Vibration Isolation System Using Bio-Inspired Vibration Isolators. Appl. Sci. 2022, 12, 11387. [Google Scholar] [CrossRef]
- He, H.; Tan, P.; Hao, L. Acceleration-based Effective Damping Ratio of Tuned Mass Damper under Seismic Excitations. Struct. Des. Tall Spec. 2022, 31, e1910. [Google Scholar] [CrossRef]
- Kiani, M.; Enayati, H. Evaluation of a Nonlinear TMD Seismic Performance for Multi-degree of Freedom Structures. Asian J. Civil Eng. 2018, 25, 1395–1412. [Google Scholar] [CrossRef]
- Bousouar, A.; Harzallah, S.; Nail, B.; Tibermacine, I.E. An Investigation on the Effects of Using TMD for Vibration Control on the Response of High-rise Buildings to Seismic Excitation. Stud. Eng. Exact Sci. 2024, 5, 2–18. [Google Scholar] [CrossRef]
- Wang, M.; Nagarajaiah, S.; Chen, L. Adaptive Passive Negative Stiffness and Damping for Retrofit of Existing Tall Buildings with Tuned Mass Damper: TMD-NSD. J. Struct. Eng. 2022, 148, 04022180. [Google Scholar] [CrossRef]
- Frahm, H. Device for Damping Vibrations of Bodies. U.S. Patent 9,899,58A, 18 April 1911. [Google Scholar]
- Fujino, Y.; Abé, M. Design Formulas for Tuned Mass Dampers Based on a Perturbation Technique. Earthq. Eng. Struct. Dyn. 1993, 22, 833–854. [Google Scholar] [CrossRef]
- Fujino, Y. Vibration, Control and Monitoring of Long-span Bridges—Recent Research, Developments and Practice in Japan. J. Constr. Steel Res. 2002, 58, 71–97. [Google Scholar] [CrossRef]
- Fujino, Y.; Yoshida, Y. Wind-induced Vibration and Control of Trans-Tokyo Bay Crossing Bridge. J. Struct. Eng. 2002, 128, 1012–1025. [Google Scholar] [CrossRef]
- Mazzon, L.; Frappa, G.; Pauletta, M. Effectiveness of Tuned Mass Damper in Reducing Damage Caused by Strong Earthquake in a Medium-Rise Building. Appl. Sci. 2023, 13, 6815. [Google Scholar] [CrossRef]
- Pellizzari, F.; Marano, G.; Palmeri, A.; Greco, R.; Domaneschi, M. Robust Optimization of MTMD Systems for the Control of Vibrations. Probabilistic Eng. Mech. 2022, 70, 103347. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, L.; Chen, G. Optimal Design and Application of a MTMD System for a Glulam Footbridge under Human-induced Excitation. Eur. J. Wood Wood Prod. 2022, 81, 529–545. [Google Scholar] [CrossRef]
- Xu, K.; Igusa, T. Dynamic Characteristics of Multiple Substructures with Closely Spaced Frequencies. Earthq. Eng. Struct. Dyn. 1992, 21, 1059–1070. [Google Scholar] [CrossRef]
- Wielgos, P.; Geryło, R. Optimization of Multiple Tuned Mass Damper (MTMD) Parameters for a Primary System Reduced to a Single Degree of Freedom (SDOF) through the Modal Approach. Appl. Sci. 2021, 11, 1389. [Google Scholar] [CrossRef]
- Smith, M.C. Synthesis of Mechanical Networks: The Inerter. IEEE Trans. Autom. Control 2002, 47, 1648–1662. [Google Scholar] [CrossRef]
- Ikago, K.; Saito, K.; Inoue, N. Seismic Control of Single-degree-of-freedom Structure Using Tuned Viscous Mass Damper. Earthq. Eng. Struct. Dyn. 2012, 41, 453–474. [Google Scholar] [CrossRef]
- Kawamata, S. Development of a Vibration Control System of Structures by Means of Mass Pump; Institute of Industrial Science, University of Tokyo: Tokyo, Japan, 1973. [Google Scholar]
- Kawamata, S.; Funaki, N.; Itoh, Y. Passive Control of Building Frames by Means of Liquid Dampers Sealed by Viscoelastic Material. In Proceedings of the 12th World Conference on Earthquake Engineering, Auckland, New Zealand, 1–4 February 2000. [Google Scholar]
- Saito, K.; Toyota, K.; Nagae, K.; Sugimura, Y.; Nakano, T.; Nakaminam, I.S.; Arima, F. Dynamic Loading Test and Application to a High-rise Building of Viscous Damping Devices with Amplification System. In Proceedings of the Third World Conference on Structural Control, Como, Italy, 11 April 2002. [Google Scholar]
- Saito, K.; Sugimura, Y.; Nakaminami, S.; Kida, H.; Inoue, N. Vibration Tests of 1-story Response Control System Using Inertial Mass and Optimized Soft Spring and Viscous Element. In Proceedings of the 14th World Conference on Earthquake Engineering, Beijing, China, 12–17 November 2008. [Google Scholar]
- Ikago, K.; Sugimura, Y.; Saito, K.; Inoue, N. Optimum Seismic Response Control of Multiple Degree of Freedom Structures Using Tuned Viscous Mass Dampers. In Proceedings of the Tenth International Conference on Computational Structures Technology, Valencia, Spain, 14–17 September 2010. [Google Scholar]
- Zhang, R.; Wu, M.; Ren, X.; Pan, C. Seismic Response Reduction of Elastoplastic Structures with Inerter Systems. Eng. Struct. 2021, 230, 111661. [Google Scholar] [CrossRef]
- Chen, M.; Papageorgiou, C.; Scheibe, F.; Wang, F.; Smith, M. The Missing Mechanical Circuit Element. IEEE Circuits Syst. Mag. 2009, 9, 10–26. [Google Scholar] [CrossRef]
- Papageorgiou, C.; Houghton, N.E.; Smith, M.C. Experimental Testing and Analysis of Inerter Devices. J. Dyn. Syst. Meas. Control 2009, 131, 101–116. [Google Scholar] [CrossRef]
- Liu, X.; Yang, Y.; Sun, Y.; Zhong, Y.; Zhou, L.; Li, S.; Wu, C. Tuned-Mass-Damper-Inerter Performance Evaluation and Optimal Design for Transmission Line under Harmonic Excitation. Buildings 2022, 12, 435. [Google Scholar] [CrossRef]
- Shen, W.; Niyitangamahoro, A.; Feng, Z.; Zhu, H. Tuned Inerter Dampers for Civil Structures Subjected to Earthquake Ground Motions: Optimum Design and Seismic Performance. Eng. Struct. 2019, 198, 109470. [Google Scholar] [CrossRef]
- Li, C.; Zhang, L. Evaluation of the Dual-layer Multiple Tuned Mass Dampers for Structures Subjected to Earthquake. J. Vib. Shock 2005, 24, 45–46+134. (In Chinese) [Google Scholar] [CrossRef]
- Tan, Y.; Guan, R.; Zhang, Z. Performance of Accelerated Oscillator Dampers under Seismic Loading. Adv. Mech. Eng. 2018, 10, 2072045839. [Google Scholar] [CrossRef]
- Zhou, J. Damping Performance and Optimization of Accelerated Oscillator Dampers. Master’s Thesis, Dalian University of Technology, Dalian, China, 2019. (In Chinese) [Google Scholar] [CrossRef]
- Tan, Y.; Chen, T.; Li, Z. Performance of Optimum Accelerated Oscillator Damper-based Isolation System for Buildings. Eng. Struct. 2021, 235, 112044. [Google Scholar] [CrossRef]
- Clough, R.W.; Penzien, J. Dynamics of Structures; Computer and Structures: Berkeley, CA, USA, 2003. [Google Scholar]
- Wang, X. Development Status and Trend Analysis of High Strength Spring Steel. China’s Manganese Ind. 2017, 35, 104–106. (In Chinese) [Google Scholar] [CrossRef]
- Chen, K.; Jiang, Z.; Liu, F.; Yu, J.; Li, Y.; Gong, W.; Chen, C. Effect of Quenching and Tempering Temperature on Microstructure and Tensile Properties of Microalloyed Ultra-high Strength Suspension Spring Steel. Mat. Sci. Eng. A Struct. 2019, 766, 138272. [Google Scholar] [CrossRef]
- Lu, Y.; Wu, X.; Zhu, L.; Cao, L. Application of 3σ Theorem in the Partition of Resonance Zone. J. Mach. Des. 2008, 25, 48–50. (In Chinese) [Google Scholar] [CrossRef]
- Chopra, A.K. Dynamics of Structures, Theory and Applications to Earthquake Engineering, 4th ed.; Pearson Education Limited: Upper Saddle River, NJ, USA, 2013. [Google Scholar]
- GB 50011-2010; Code for Seismic Design of Buildings. Architecture and Industry Press: Beijing, China, 2016.
- Dong, S.; Zhang, X.; Jia, C.; Li, S.; Wang, K. Study on Seismic Response and Vibration Reduction of Shield Tunnel Lining in Coastal Areas. Sustainability 2023, 15, 4185. [Google Scholar] [CrossRef]
- Chang, J.; Deng, Y.; Mu, H. Effects of the Earth Fissure on the Seismic Response Characteristics of Nearby Metro Stations and Tunnels. B Eng. Geol. Environ. 2023, 82, 232. [Google Scholar] [CrossRef]
- Li, H.; Yin, Y.; Wang, S. Studies on Seismic Reduction of Story-increased Buildings with Friction Layer and Energy Dissipated Devices. Earthq. Eng. Struct. Dyn. 2003, 32, 2143–2160. [Google Scholar] [CrossRef]
- Sarvestani, H.A. Structural Evaluation of Steel Self-centering Moment-resisting Frames under Far-filed and Near-field Earthquakes. J. Constr. Steel Res. 2018, 151, 83–93. [Google Scholar] [CrossRef]
- Gorai, S.; Maity, D. Seismic Response of Concrete Gravity Dams under Near Field and Far Field Ground Motions. Eng. Struct. 2019, 196, 109292. [Google Scholar] [CrossRef]
- Li, Y.; Tian, Y.; Zong, J. Seismic Responses of a Tunnel-soil-surface Structure System under Multidimensional Near-field and Far-field Seismic Waves through a Shaking Table Test. KSCE J. Civ. Eng. 2022, 26, 4717–4736. [Google Scholar] [CrossRef]
- Etedali, S.; Akbari, M.; Seifi, M. MOCS-based Optimum Design of TMD and FTMD for Tall Buildings under Near-field Earthquakes including SSI Effects. Soil Dyn. Earthq. Eng. 2019, 119, 36–50. [Google Scholar] [CrossRef]



 .
.
.
.
 reflects the x1max (i.e., the maximum time-history displacement of primary mass m1) within the initial 12 s of this case; (b) amplitude spectrum result.
reflects the x1max (i.e., the maximum time-history displacement of primary mass m1) within the initial 12 s of this case; (b) amplitude spectrum result.
reflects the x1max (i.e., the maximum time-history displacement of primary mass m1) within the initial 12 s of this case; (b) amplitude spectrum result.
reflects the x1max (i.e., the maximum time-history displacement of primary mass m1) within the initial 12 s of this case; (b) amplitude spectrum result.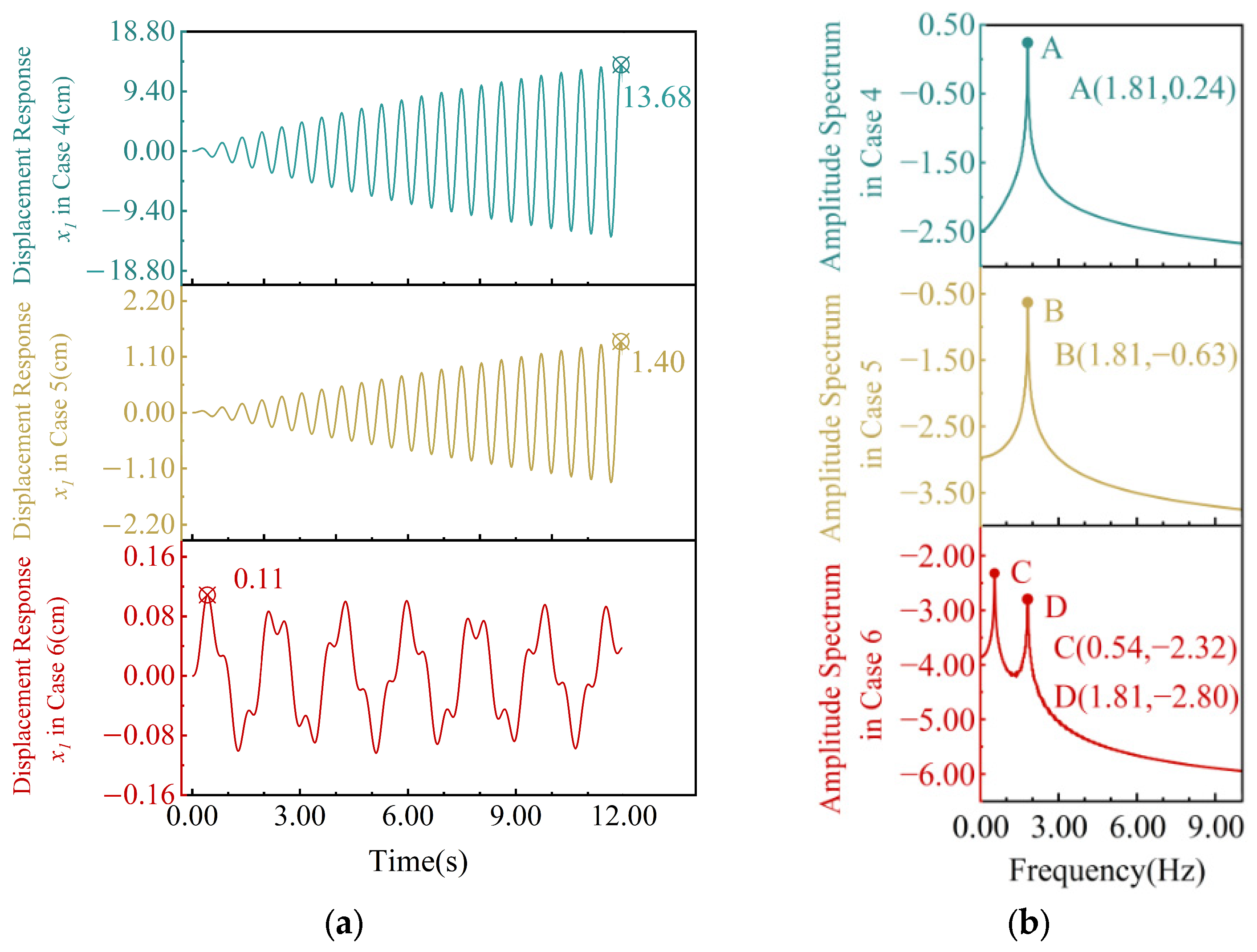



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| m1 (kg) | m2 (kg) | k1 (N/m) | k2 (N/m) | c1 (Ns/m) | c2 (Ns/m) | x1 (0) (m) | v1 (0) (m/s) | fload (Hz) | a (m/s2) | r |
|---|---|---|---|---|---|---|---|---|---|---|
| 1000 | 40 | 100,000 | 4000 | 100 | 40 | 0 | 0 | 1.27 | −3.8 | 4 |
| m1 (kg) | m2 (kg) | k1 (kN/m) | k2 (kN/m) | c1 (Ns/m) | c2 (Ns/m) | x1 (0) (m) | v1 (0) (m/s) | a (m/s2) | r |
|---|---|---|---|---|---|---|---|---|---|
| 29,485 | 300 | 3800 | 1389.4 | 3740 | 237 | 0 | 0 | −5 | 3 |
| kA (kN/m) | kB (kN/m) | l1 (m) | l2 (m) | l3 (m) |
|---|---|---|---|---|
| 47.25 | 2425.85 | 0.80 | 0.35 | 0.40 |
| m1 (kg) | m2 (kg) | m3 (kg) | k1 (kN/m) | c1 (Ns/m) | c2 (Ns/m) | c3 (Ns/m) | r2 | r3 |
|---|---|---|---|---|---|---|---|---|
| 29,485 | 19,165 | 19,165 | 3800 | 3740 | 237 | 237 | 3 | 3 |
| m2 (t) | c2 (Ns/m) | r2 | kA (kN/m) | kB (kN/m) | l1 (m) | l2 (m) | l3 (m) |
|---|---|---|---|---|---|---|---|
| 180 | 0 | 5 | 81.30 | 81.30 | 0.73 | 0.38 | 0.40 |
| Type | Seismic Wave Number | Seismic Wave Name |
|---|---|---|
| Far-field | 1 | El Centro |
| 2 | Chi Chi, Chiayi Taiwan China #CHY086 | |
| 3 | Loma Prieta, Hayward—Bart Sta. | |
| Near-field | 4 | Landers |
| 5 | Northridge | |
| 6 | Kobe |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Q.; Tan, Y.; Sun, M.; Jiang, Y.; Wang, P.; Meng, F.; Li, Z. Performance of Strengthened Accelerated Oscillator Damper for Vibration Control of Bridges. Appl. Sci. 2024, 14, 6732. https://doi.org/10.3390/app14156732
Zhao Q, Tan Y, Sun M, Jiang Y, Wang P, Meng F, Li Z. Performance of Strengthened Accelerated Oscillator Damper for Vibration Control of Bridges. Applied Sciences. 2024; 14(15):6732. https://doi.org/10.3390/app14156732
Chicago/Turabian StyleZhao, Qiuming, Yonggang Tan, Minggang Sun, Yunlong Jiang, Pinqing Wang, Fanxu Meng, and Zhijun Li. 2024. "Performance of Strengthened Accelerated Oscillator Damper for Vibration Control of Bridges" Applied Sciences 14, no. 15: 6732. https://doi.org/10.3390/app14156732
APA StyleZhao, Q., Tan, Y., Sun, M., Jiang, Y., Wang, P., Meng, F., & Li, Z. (2024). Performance of Strengthened Accelerated Oscillator Damper for Vibration Control of Bridges. Applied Sciences, 14(15), 6732. https://doi.org/10.3390/app14156732