


Bump Feature Detection Based on Spectrum Modeling of Discrete-Sampled, Non-Homogeneous Multi-Sensor Stream Data


Abstract
1. Introduction
2. Related Work
3. Methodology
3.1. Motivation and Background
3.2. Model BFRS and Analyze Driving Behavior
3.3. Speed Computation and Data Augmentation Based on Movement Feature
3.3.1. Data Augmentation Based on Driving Direction
3.3.2. Data Augmentation Based on Driving Direction
3.4. Spectrum Modeling for Discrete-Sampled Recordings
3.5. BFRS Collection Using Non-Homogeneous Spectrum Feature
- (1)
- A convolutional layer uses a set of learnable filters (or kernels) to scan input.
- (2)
- The batch normalization layer normalizes the data on each mini-batch to accelerate the model.
- (3)
- The activation layer is used to introduce non-linearity, with the ReLU function usually employed.
- (4)
- The pooling layer down-samples the input data to reduce the data’s dimensionality.
- (5)
- The dropout layer turns off a subset of neurons at random during training to prevent overfitting.
- (6)
- A fully connected layer is used for tasks like classification at the end of a CNN.
- (7)
- The softmax layer converts a set of values into a set between 0 and 1, the sum of which equals 1.
- (8)
- A classification layer is used for classification tasks.
3.6. BFRS Representation Based on the Weighted Clustering
3.6.1. Refinement Using the Buffered Window
- (1)
- More than half of the detected result is not labeled as “road”.
- (2)
- More than 60% percent of detected results in the buffered window is BFRS.
- (3)
- The probability of a detected result is larger than the probability threshold .
3.6.2. Representation Using Weighted Clustering
- (1)
- Compute the difference index of each detected sampling point based on the index orders from the original recordings.
- (2)
- Segment detected sampling points into each group if the index difference is within the threshold value d, as denoted in (15).
- (3)
- Each detected sampling point in is composed of the specific coordinate and the related probability ; hence, points in each can be further integrated into a single point (depicted in Figure 6c) based on the weight of , as denoted in (16).
3.7. BFRS Detection Algorithm from Multi-Sensor Stream Data
| Algorithm 1 The BFRS detection algorithm |
| denoted as (1) and (2) Output: BFRS denoted as (2) //step 1: preprocessing and spatial transformation ); //Align the Orientation with Acceleration ); //based on (3) //step 2: data augmentation and BFRS spectrum modeling ) //based on (4) and (5) )//based on (6)–(9) Sf); //based on (10)–(12) //step 3: BFRS collection based on CNN = TrainCNN(Sf); FOREACH Sfi IN Sf Wi ); //slice the spectrum ); //based on (13) END //based on (14) //step 4: BFRS representation based on weighted clustering ; // based on (15) ; // based on (16) |
4. Experiments and Discussion
4.1. Multi-Sensor Stream Data Collected Using Smartphone
4.2. Non-Homogeneous Analysis and BFRS Modeling
4.3. BFRS Detection and Representation
4.4. BFRS Detection Comparison with Different Methods
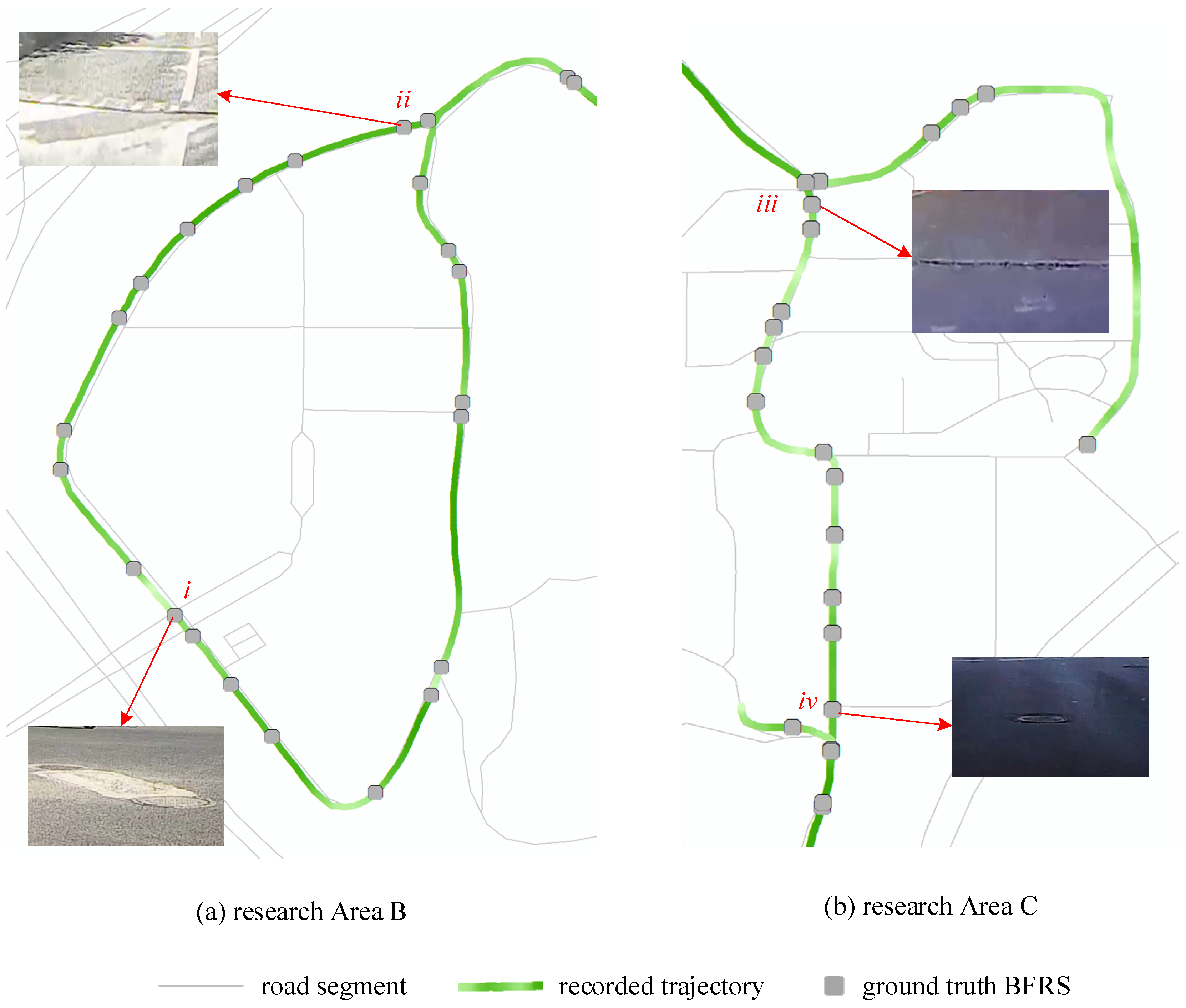
4.5. BFRS Detection and Comparison in the Different Areas
5. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, W.; Batty, M.; Goodchild, M.F. Real-time GIS for smart cities. Int. J. Geogr. Inf. Sci. 2020, 34, 311–324. [Google Scholar] [CrossRef]
- Huang, H.; Yao, X.A.; Krisp, J.M.; Jiang, B. Analytics of location-based big data for smart cities: Opportunities, challenges, and future directions. Comput. Environ. Urban Syst. 2021, 90, 101712. [Google Scholar] [CrossRef]
- Li, X.; Goldberg, D.W. Toward a mobile crowdsensing system for road surface assessment. Comput. Environ. Urban Syst. 2018, 69, 51–62. [Google Scholar] [CrossRef]
- Li, D.; Shan, J.; Shao, Z.; Zhou, X.; Yao, Y. Geomatics for smart cities-concept, key techniques, and applications. Geo-Spat. Inf. Sci. 2013, 16, 13–24. [Google Scholar] [CrossRef]
- Wei, Y.; Zhang, K.; Ji, S. Simultaneous road surface and centerline extraction from large-scale remote sensing images using CNN-based segmentation and tracing. IEEE Trans. Geosci. Remote Sens. 2020, 58, 8919–8931. [Google Scholar] [CrossRef]
- Yi, C.W.; Chuang, Y.T.; Nian, C.S. Toward crowdsourcing-based road pavement monitoring by mobile sensing technologies. IEEE Trans. Intell. Transp. Syst. 2015, 16, 1905–1917. [Google Scholar] [CrossRef]
- Li, X.; Huo, D.; Goldberg, D.W.; Chu, T.; Yin, Z.; Hammond, T. Embracing crowdsensing: An enhanced mobile sensing solution for road anomaly detection. ISPRS Int. J. Geo-Inf. 2019, 8, 412. [Google Scholar] [CrossRef]
- Rajamohan, D.; Gannu, B.; Rajan, K.S. MAARGHA: A prototype system for road condition and surface type estimation by fusing multi-sensor data. ISPRS Int. J. Geo-Inf. 2015, 4, 1225–1245. [Google Scholar] [CrossRef]
- Dong, D.; Li, Z. Smartphone sensing of road surface condition and defect detection. Sensors 2021, 21, 5433. [Google Scholar] [CrossRef]
- Wang, S.; Yang, F.; Cheng, Y.; Yang, Y.; Wang, Y. Adaboost-based crack detection method for pavement. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2018; Volume 189, p. 022005. [Google Scholar] [CrossRef]
- Ma, N.; Fan, J.; Wang, W.; Wu, J.; Jiang, Y.; Xie, L.; Fan, R. Computer vision for road imaging and pothole detection: A state-of-the-art review of systems and algorithms. Transp. Saf. Environ. 2022, 4, tdac026. [Google Scholar] [CrossRef]
- Jenkins, M.D.; Carr, T.A.; Iglesias, M.I.; Buggy, T.; Morison, G. A deep convolutional neural network for semantic pixel-wise segmentation of road and pavement surface cracks. In Proceedings of the 2018 26th European Signal Processing Conference (EUSIPCO), Rome, Italy, 3–7 September 2018; pp. 2120–2124. [Google Scholar] [CrossRef]
- Zhang, Z.; Ai, X.; Chan, C.K.; Dahnoun, N. An efficient algorithm for pothole detection using stereo vision. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 564–568. [Google Scholar] [CrossRef]
- Xiao, L.; Dai, B.; Liu, D.; Hu, T.; Wu, T. CRF based road detection with multi-sensor fusion. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 192–198. [Google Scholar] [CrossRef]
- Fan, R.; Ozgunalp, U.; Hosking, B.; Liu, M.; Pitas, I. Pothole detection based on disparity transformation and road surface modeling. IEEE Trans. Image Process. 2019, 29, 897–908. [Google Scholar] [CrossRef] [PubMed]
- Kulambayev, B.; Beissenova, G.; Katayev, N.; Abduraimova, B.; Zhaidakbayeva, L.; Sarbassova, A.; Akhmetova, O.; Issayev, S.; Suleimenova, L.; Kasenov, S.; et al. A Deep Learning-Based Approach for Road Surface Damage Detection. Comput. Mater. Contin. 2022, 73, 3403–3418. [Google Scholar] [CrossRef]
- Chen, C.; Seo, H.; Zhao, Y. A novel pavement transverse cracks detection model using WT-CNN and STFT-CNN for smartphone data analysis. Int. J. Pavement Eng. 2022, 23, 4372–4384. [Google Scholar] [CrossRef]
- Siegemund, J.; Franke, U.; Förstner, W. A temporal filter approach for detection and reconstruction of curbs and road surfaces based on conditional random fields. In Proceedings of the 2011 IEEE Intelligent Vehicles Symposium (IV), Baden-Baden, Germany, 5–9 June 2011; pp. 637–642. [Google Scholar] [CrossRef]
- Kang, B.; Choi, S. Pothole detection system using 2D LiDAR and camera. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 744–746. [Google Scholar] [CrossRef]
- Bhatt, A.; Bharadwaj, S.; Sharma, V.B.; Dubey, R.; Biswas, S. An Overview of Road Health Monitoring System for Rigid Pavement By Terrestrial Laser Scanner. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 173–180. [Google Scholar] [CrossRef]
- Harikrishnan, P.M.; Gopi, V.P. Vehicle vibration signal processing for road surface monitoring. IEEE Sens. J. 2017, 17, 5192–5197. [Google Scholar] [CrossRef]
- Yuan, Y.; Islam, S.; Yuan, Y.; Wang, S.; Baker, T.; Kolbe, L.M. EcRD: Edge-cloud computing framework for smart road damage detection and warning. IEEE Internet Things J. 2020, 8, 12734–12747. [Google Scholar] [CrossRef]
- Singh, G.; Bansal, D.; Sofat, S.; Aggarwal, N. Smart patrolling: An efficient road surface monitoring using smartphone sensors and crowdsourcing. Pervasive Mob. Comput. 2017, 40, 71–88. [Google Scholar] [CrossRef]
- Mednis, A.; Strazdins, G.; Zviedris, R.; Kanonirs, G.; Selavo, L. Real time pothole detection using android smartphones with accelerometers. In Proceedings of the 2011 International Conference on Distributed Computing in Sensor Systems and Workshops (DCOSS), Barcelona, Spain, 27–29 June 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Nunes, D.E.; Mota, V.F.S. A participatory sensing framework to classify road surface quality. J. Internet Serv. Appl. 2019, 10, 13. [Google Scholar] [CrossRef]
- Xu, C.; Zhang, Q.; Mei, L.; Chang, X.; Ye, Z.; Wang, J.; Ye, L.; Yang, W. Cross-Attention-Guided Feature Alignment Network for Road Crack Detection. ISPRS Int. J. Geo-Inf. 2023, 12, 382. [Google Scholar] [CrossRef]
- Li, L.; Sun, L.; Ning, G.; Tan, S. Automatic pavement crack recognition based on BP neural network. Promet-Traffic Transp. 2014, 26, 11–22. [Google Scholar] [CrossRef]
- Azhar, K.; Murtaza, F.; Yousaf, M.H.; Habib, H.A. Computer vision based detection and localization of potholes in asphalt pavement images. In Proceedings of the 2016 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), Vancouver, BC, Canada, 15–18 May 2016; pp. 1–5. [Google Scholar] [CrossRef]
- Ouma, Y.O.; Hahn, M. Pothole detection on asphalt pavements from 2D-colour pothole images using fuzzy c-means clustering and morphological reconstruction. Autom. Constr. 2017, 83, 196–211. [Google Scholar] [CrossRef]
- Sharma, S.K.; Phan, H.; Lee, J. An application study on road surface monitoring using DTW based image processing and ultrasonic sensors. Appl. Sci. 2020, 10, 4490. [Google Scholar] [CrossRef]
- Mednis, A.; Strazdins, G.; Liepins, M.; Gordjusins, A.; Selavo, L. RoadMic: Road surface monitoring using vehicular sensor networks with microphones. In Proceedings of the Networked Digital Technologies: Second International Conference, NDT 2010, Prague, Czech Republic, 7–9 July 2010; Proceedings, Part II 2. Springer: Berlin/Heidelberg, Germany, 2010; pp. 417–429. [Google Scholar] [CrossRef]
- Allouch, A.; Koubaa, A.; Abbes, T.; Ammar, A. Roadsense: Smartphone application to estimate road conditions using accelerometer and gyroscope. IEEE Sens. J. 2017, 17, 4231–4238. [Google Scholar] [CrossRef]
- Mihoub, A.; Krichen, M.; Alswailim, M.; Mahfoudhi, S.; Salah, R.B.H. Road scanner: A road state scanning approach based on machine learning techniques. Appl. Sci. 2023, 13, 683. [Google Scholar] [CrossRef]
- Zang, K.; Shen, J.; Huang, H.; Wan, M.; Shi, J. Assessing and mapping of road surface roughness based on GPS and accelerometer sensors on bicycle-mounted smartphones. Sensors 2018, 18, 914. [Google Scholar] [CrossRef] [PubMed]
- Basavaraju, A.; Du, J.; Zhou, F.; Ji, J. A machine learning approach to road surface anomaly assessment using smartphone sensors. IEEE Sens. J. 2019, 20, 2635–2647. [Google Scholar] [CrossRef]
- Varona, B.; Monteserin, A.; Teyseyre, A. A deep learning approach to automatic road surface monitoring and pothole detection. Pers. Ubiquitous Comput. 2020, 24, 519–534. [Google Scholar] [CrossRef]
- Ren, M.; Zhang, X.; Chen, X.; Zhou, B.; Feng, Z. YOLOv5s-M: A deep learning network model for road pavement damage detection from urban street-view imagery. Int. J. Appl. Earth Obs. Geoinf. 2023, 120, 103335. [Google Scholar] [CrossRef]
- Pachori, R.B. Time-Frequency Analysis Techniques and Their Applications; CRC Press: Boca Raton, FL, USA, 2023. [Google Scholar] [CrossRef]
- Kim, D.-Y.; Lee, H.W.; Yu, J.; Park, J.-K. Application of Convolutional Neural Networks for Classifying Penetration Conditions in GMAW Processes Using STFT of Welding Data. Appl. Sci. 2024, 14, 4883. [Google Scholar] [CrossRef]
- Fukunaga, K.; Larry, H. The estimation of the gradient of a density function, with applications in pattern recognition. IEEE Trans. Inf. Theory 1975, 21, 32–40. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length | Duration | GPS Records | Acceleration Records | Orientation Records | |
|---|---|---|---|---|---|
| Area A | 6411 m | 860 s | 860 | 86,662 | 86,662 |
| Detected BFRS | Correct BFRS | Wrong BFRS | Precision | Recall | F-Score | |
|---|---|---|---|---|---|---|
| Adaptive threshold value | 7 | 2 | 5 | 28.57% | 50.00% | 0.3636 |
| CWT | 4 | 2 | 2 | 50.00% | 50.00% | 0.5000 |
| Original CNN | 7 | 4 | 3 | 57.14% | 100.00% | 0.7272 |
| The proposed method | 4 | 4 | 0 | 100.00% | 100.00% | 1.0000 |
| Length | Duration | GPS Records | Acceleration Records | Orientation Records | |
|---|---|---|---|---|---|
| Area B | 1171 m | 234 s | 234 | 23,233 | 23,233 |
| Area C | 1475 m | 1298 s | 1298 | 129,081 | 129,081 |
| Detected BFRS | Correct BFRS | Wrong BFRS | Precision | Recall | F-Score | |
|---|---|---|---|---|---|---|
| Adaptive threshold value | 41 | 18 | 23 | 43.90% | 75.00% | 0.5538 |
| CWT | 14 | 9 | 5 | 64.29% | 37.50% | 0.4737 |
| Original CNN | 14 | 8 | 6 | 57.14% | 33.33% | 0.4210 |
| The proposed method | 20 | 14 | 6 | 70.00% | 58.33% | 0.6363 |
| Detected BFRS | Correct BFRS | Wrong BFRS | Precision | Recall | F-Score | |
|---|---|---|---|---|---|---|
| Adaptive threshold value | 27 | 14 | 13 | 51.85% | 60.87% | 0.56 |
| CWT | 11 | 7 | 4 | 63.64% | 30.43% | 0.4117 |
| Original CNN | 9 | 5 | 4 | 55.56% | 21.74% | 0.3125 |
| The proposed method | 22 | 17 | 5 | 77.27% | 73.91% | 0.7555 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lyu, H.; Zhong, Q.; Jiao, D.; Hua, J. Bump Feature Detection Based on Spectrum Modeling of Discrete-Sampled, Non-Homogeneous Multi-Sensor Stream Data. Appl. Sci. 2024, 14, 6744. https://doi.org/10.3390/app14156744
Lyu H, Zhong Q, Jiao D, Hua J. Bump Feature Detection Based on Spectrum Modeling of Discrete-Sampled, Non-Homogeneous Multi-Sensor Stream Data. Applied Sciences. 2024; 14(15):6744. https://doi.org/10.3390/app14156744
Chicago/Turabian StyleLyu, Haiyang, Qiqi Zhong, Donglai Jiao, and Jianchun Hua. 2024. "Bump Feature Detection Based on Spectrum Modeling of Discrete-Sampled, Non-Homogeneous Multi-Sensor Stream Data" Applied Sciences 14, no. 15: 6744. https://doi.org/10.3390/app14156744
APA StyleLyu, H., Zhong, Q., Jiao, D., & Hua, J. (2024). Bump Feature Detection Based on Spectrum Modeling of Discrete-Sampled, Non-Homogeneous Multi-Sensor Stream Data. Applied Sciences, 14(15), 6744. https://doi.org/10.3390/app14156744