
Frequency Coordination Control Strategy for Large-Scale Wind Power Transmission Systems Based on Hybrid DC Transmission Technology with Deep Q Network Assistance

 ,
,
Abstract
:1. Introduction
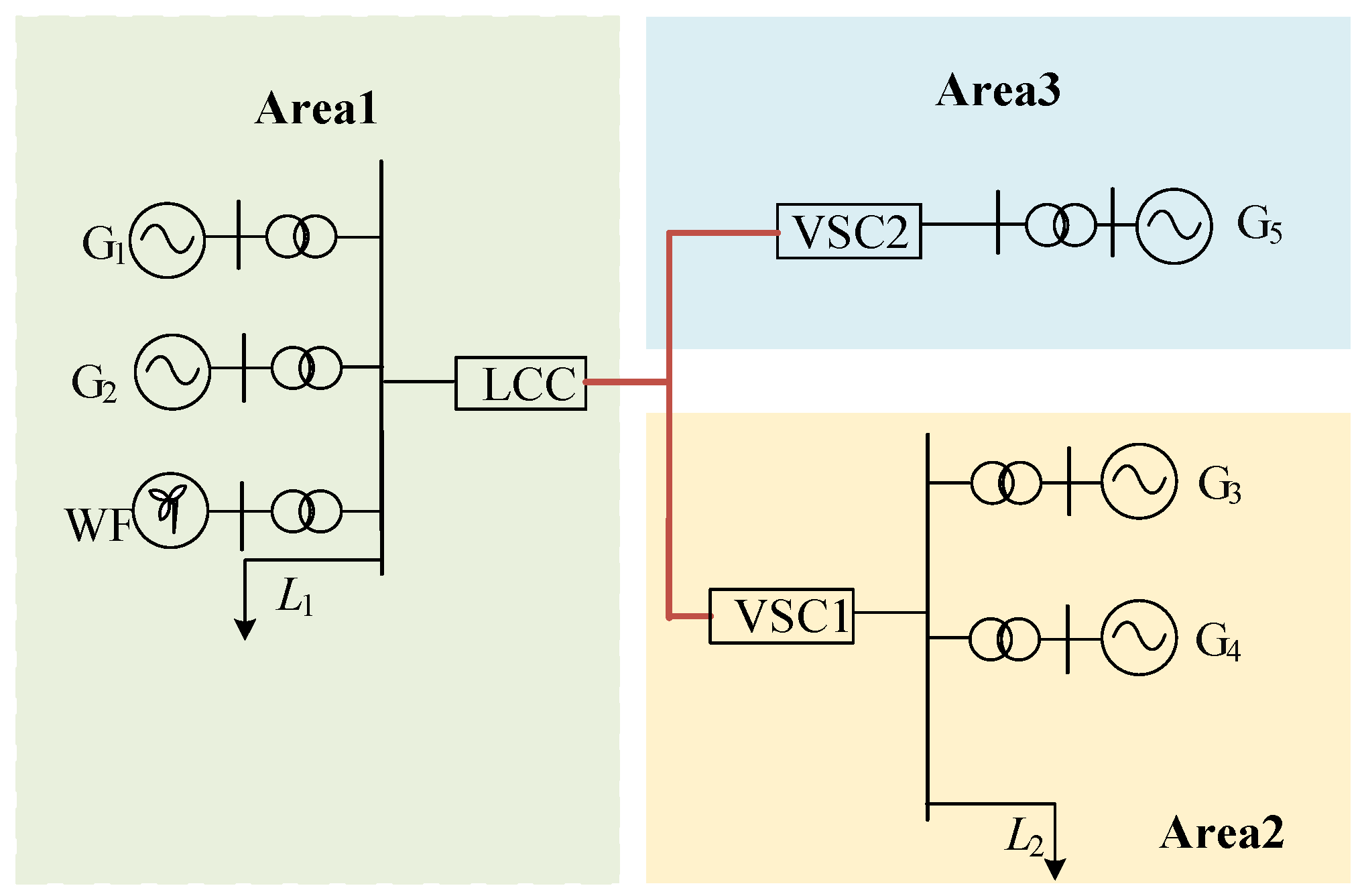
2. Hybrid DC Transmission System
2.1. Structure of the Hybrid DC Transmission System
2.2. Control Strategies of the Hybrid DC Transmission System
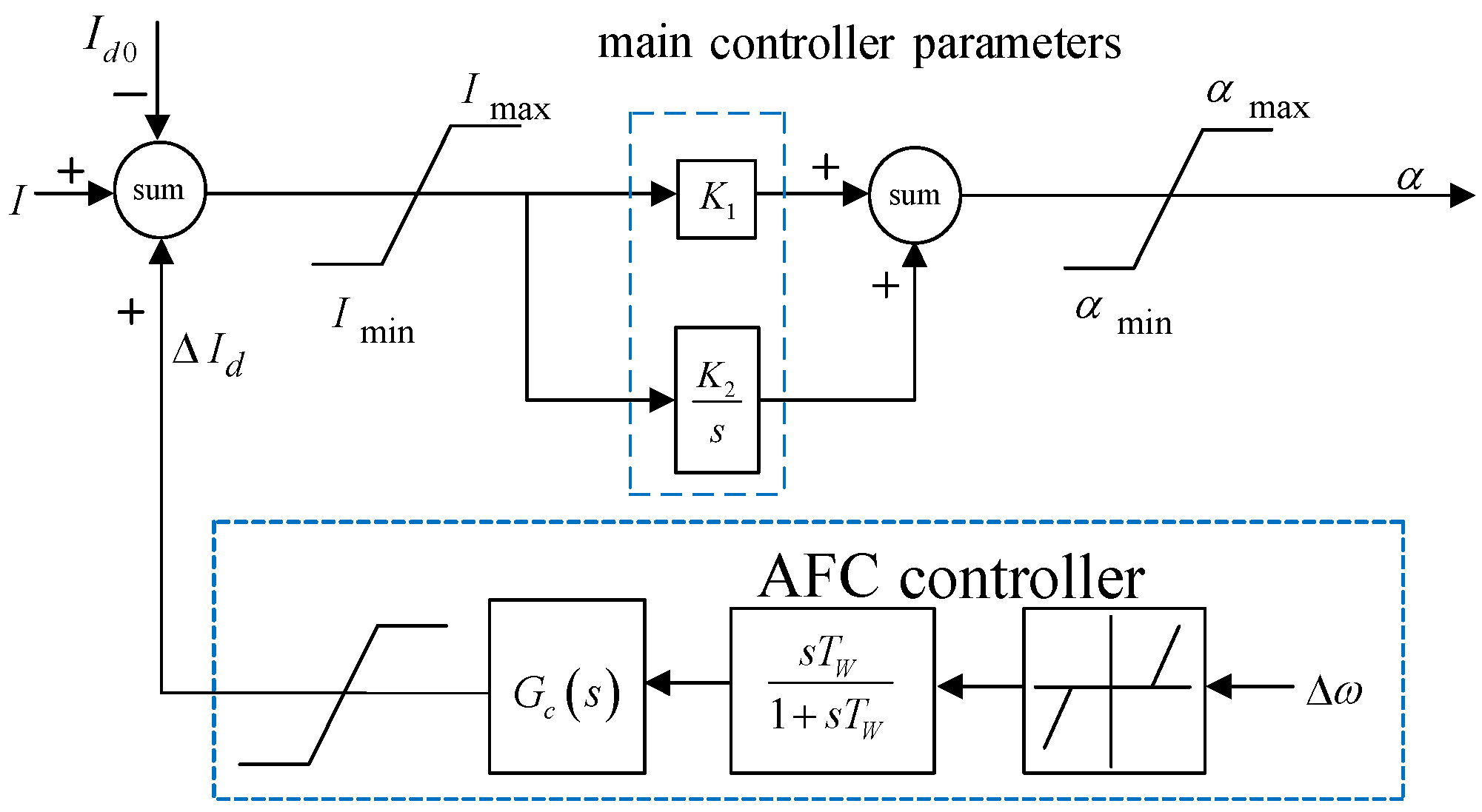
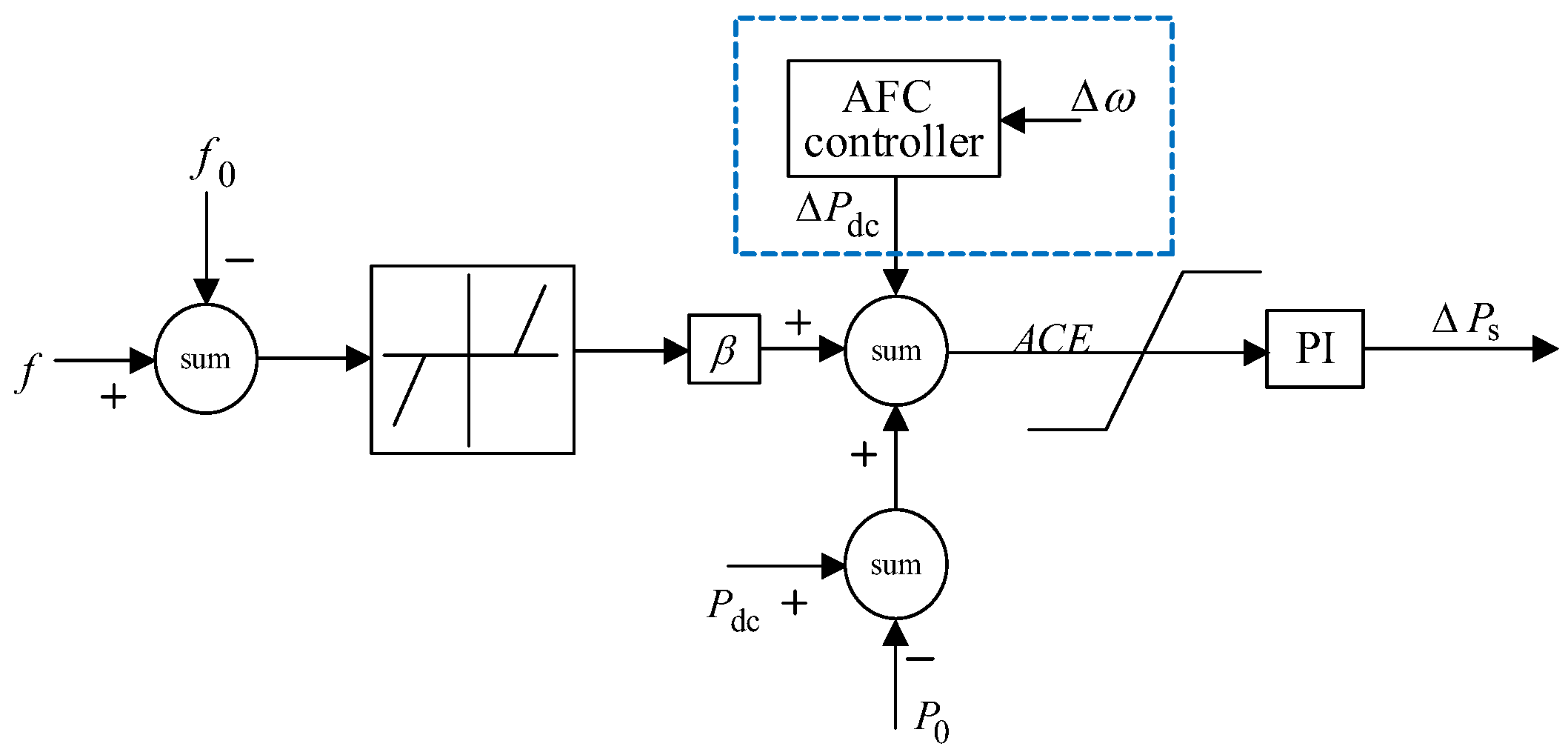
3. Frequency Coordination Control Strategy at LCC Terminal
3.1. Auxiliary Frequency Controller Design Based on VFF-RLS Algorithm
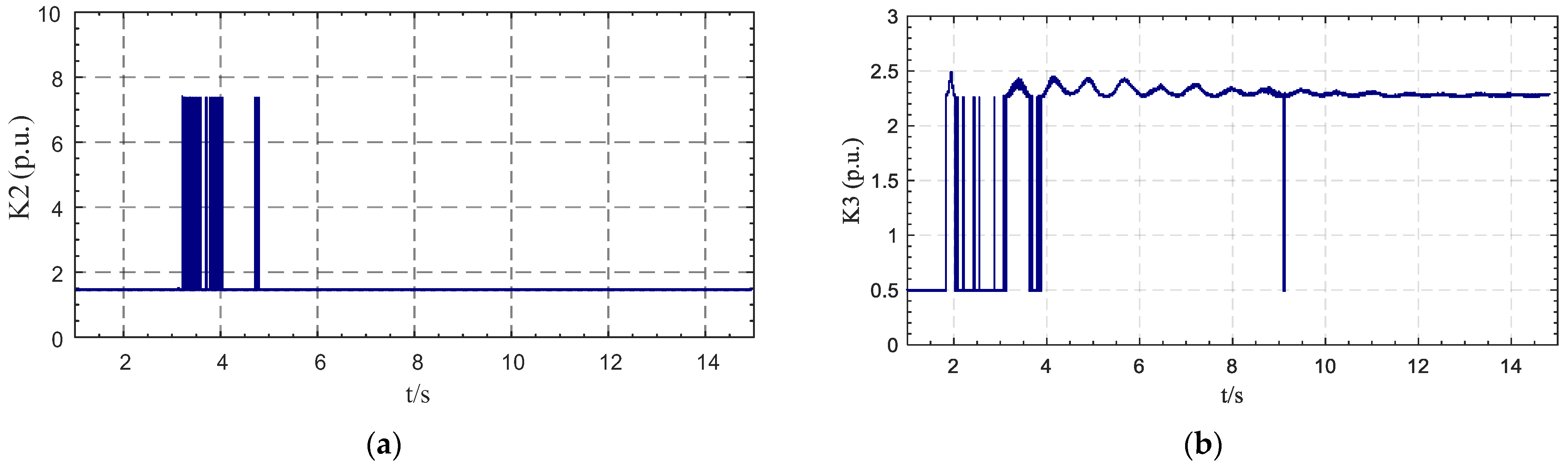
3.2. AGC Controller Parameter Optimization Using DQN Algorithm
- (1)
- Loss Function.
- (2)
- Experience Replay Mechanism.
- (3)
- Dual Network Structure.
3.3. Frequency Coordination Control through AFC and AGC
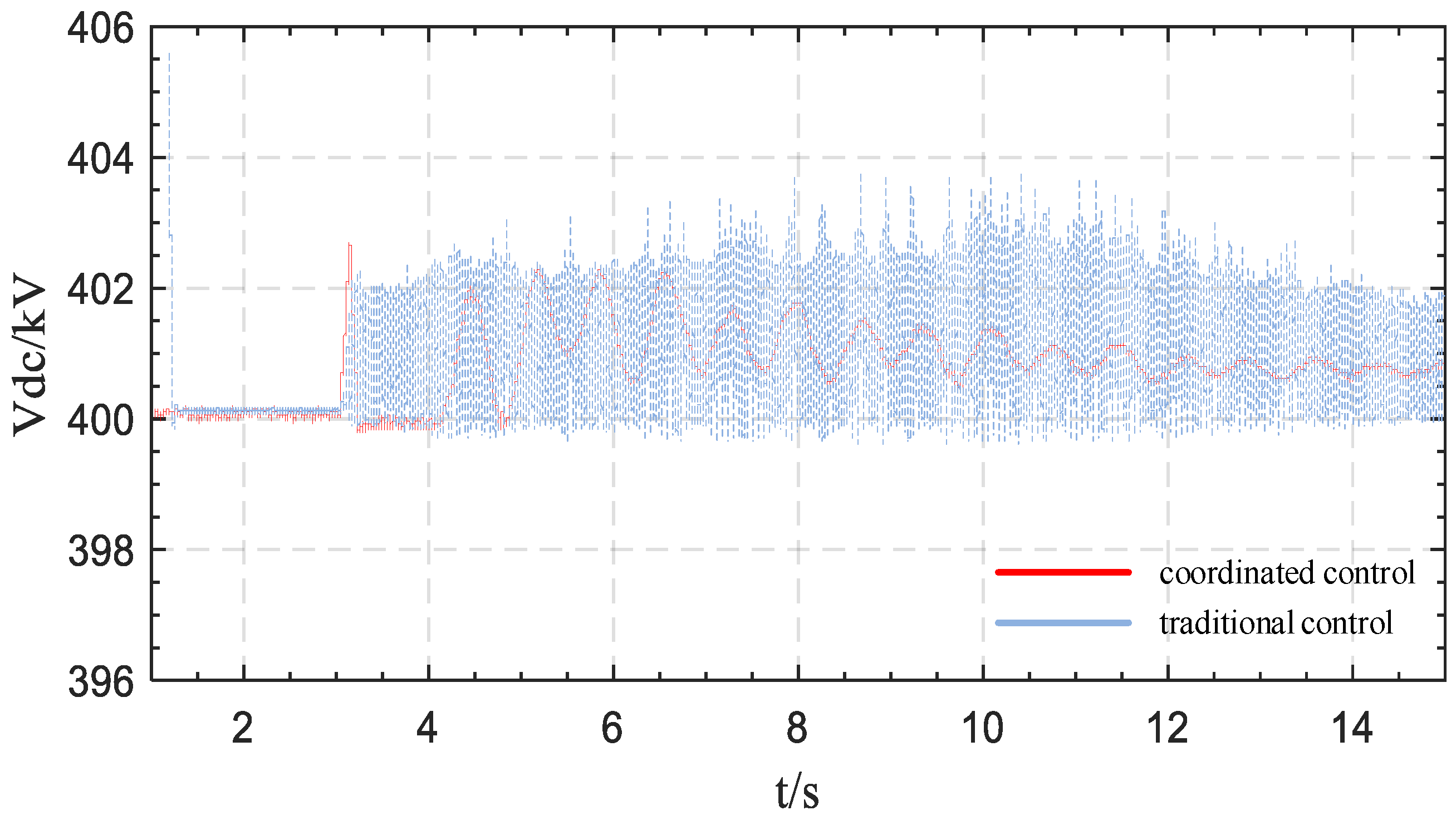
4. Adaptive DC Voltage Droop Control at VSC Terminal
5. Experimental Results
5.1. Simulation Model
5.2. Setup of Controller Parameters
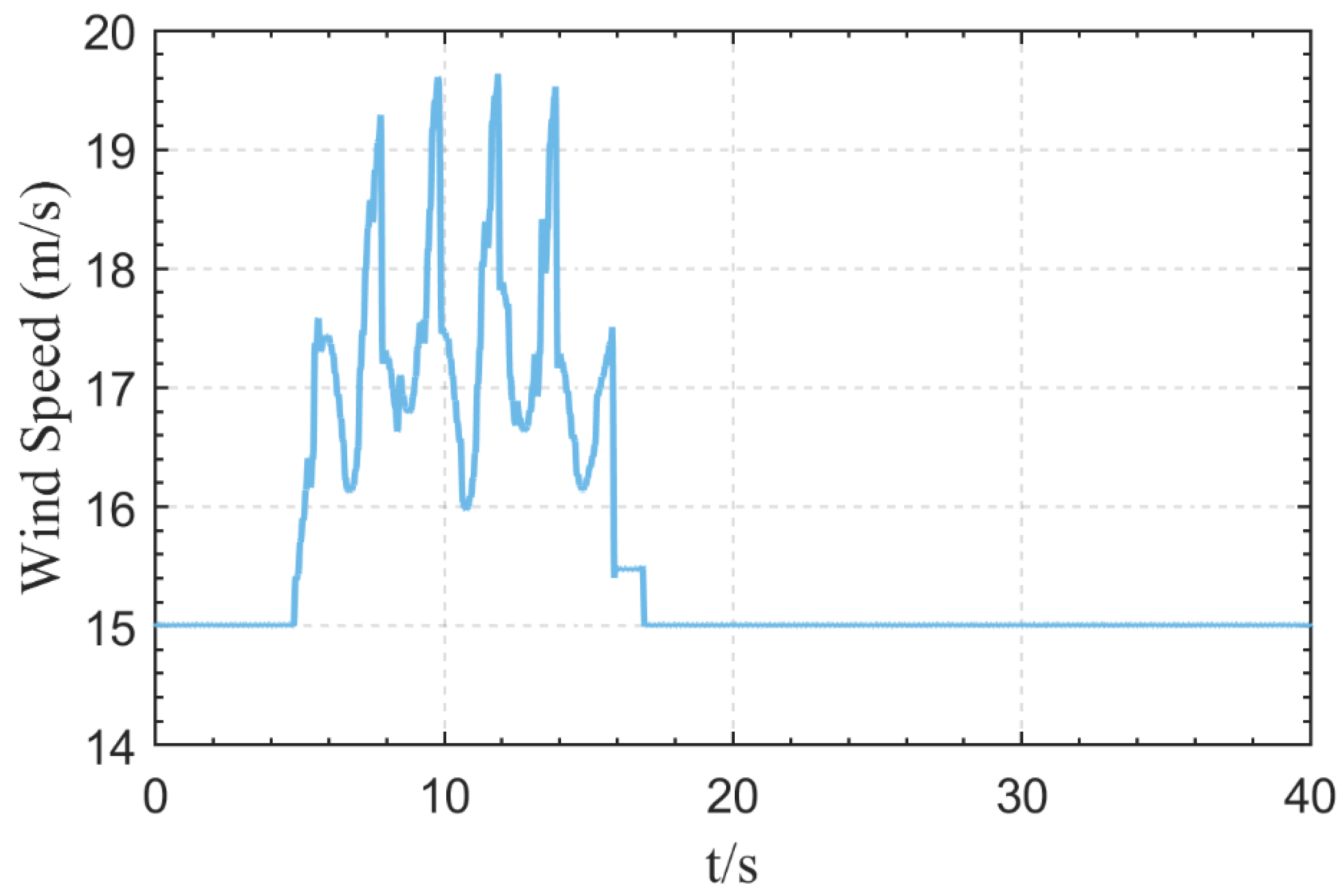
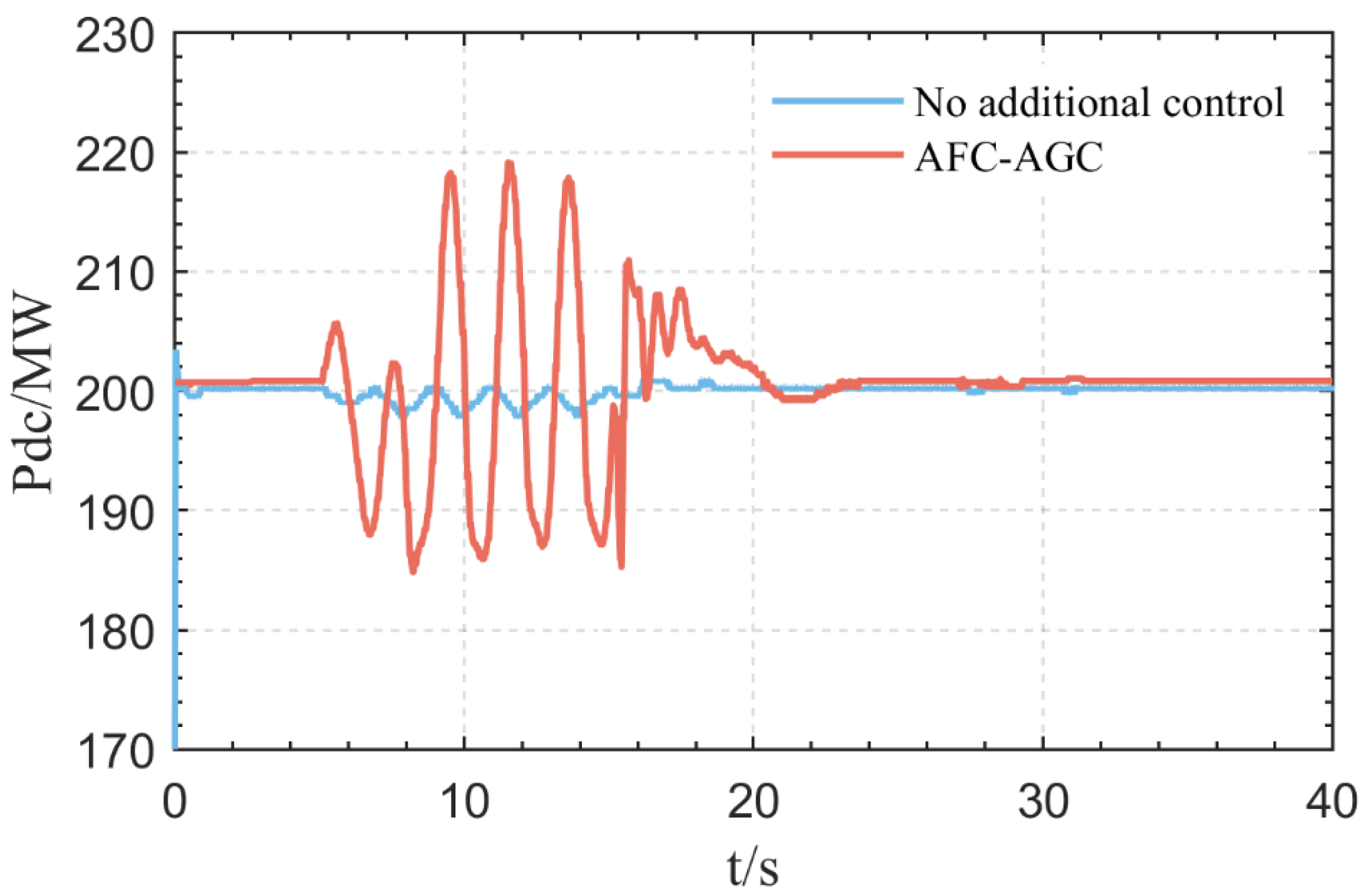
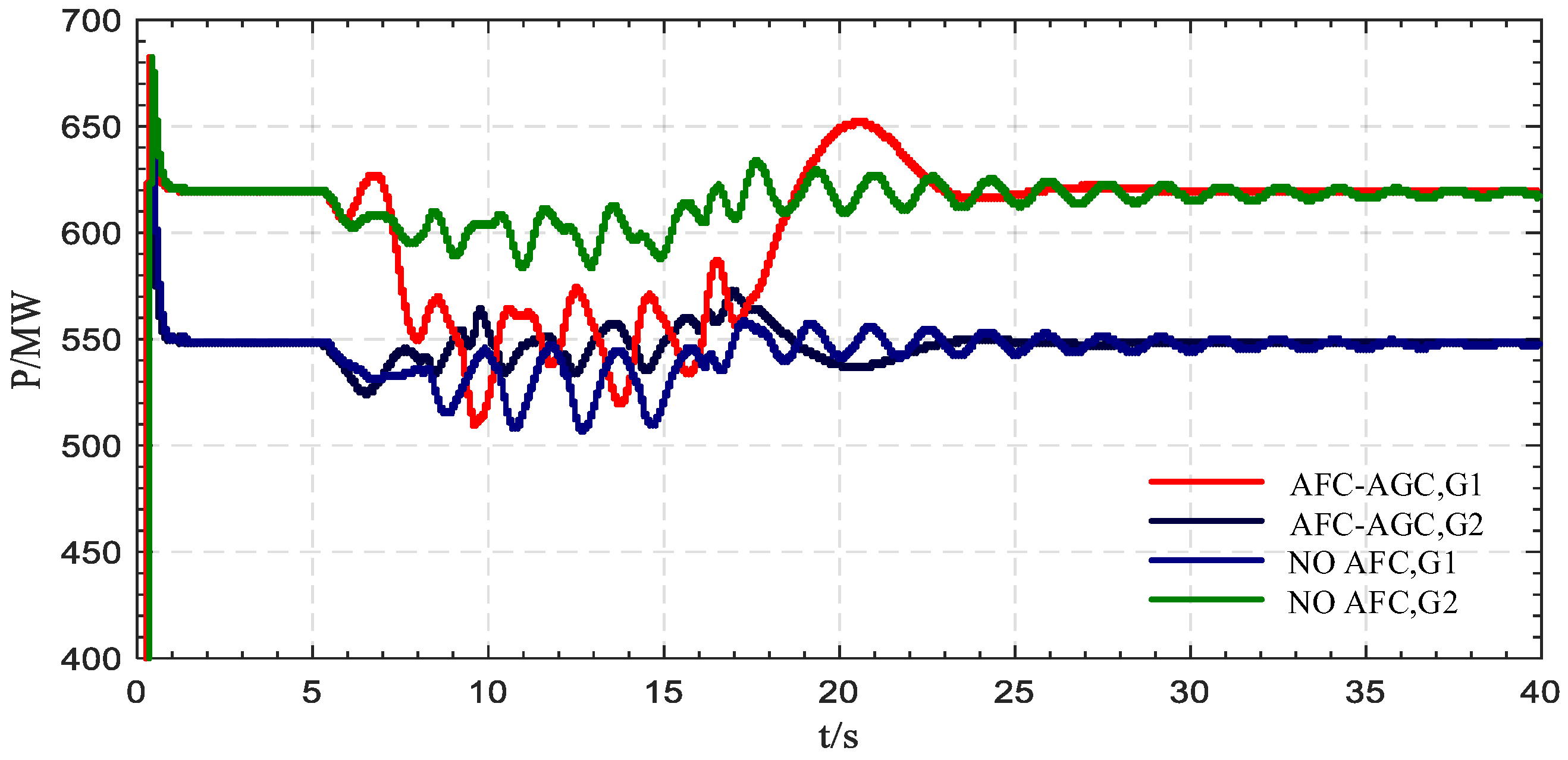
5.3. Case 1: Continuous Intense Fluctuations of Wind Speed
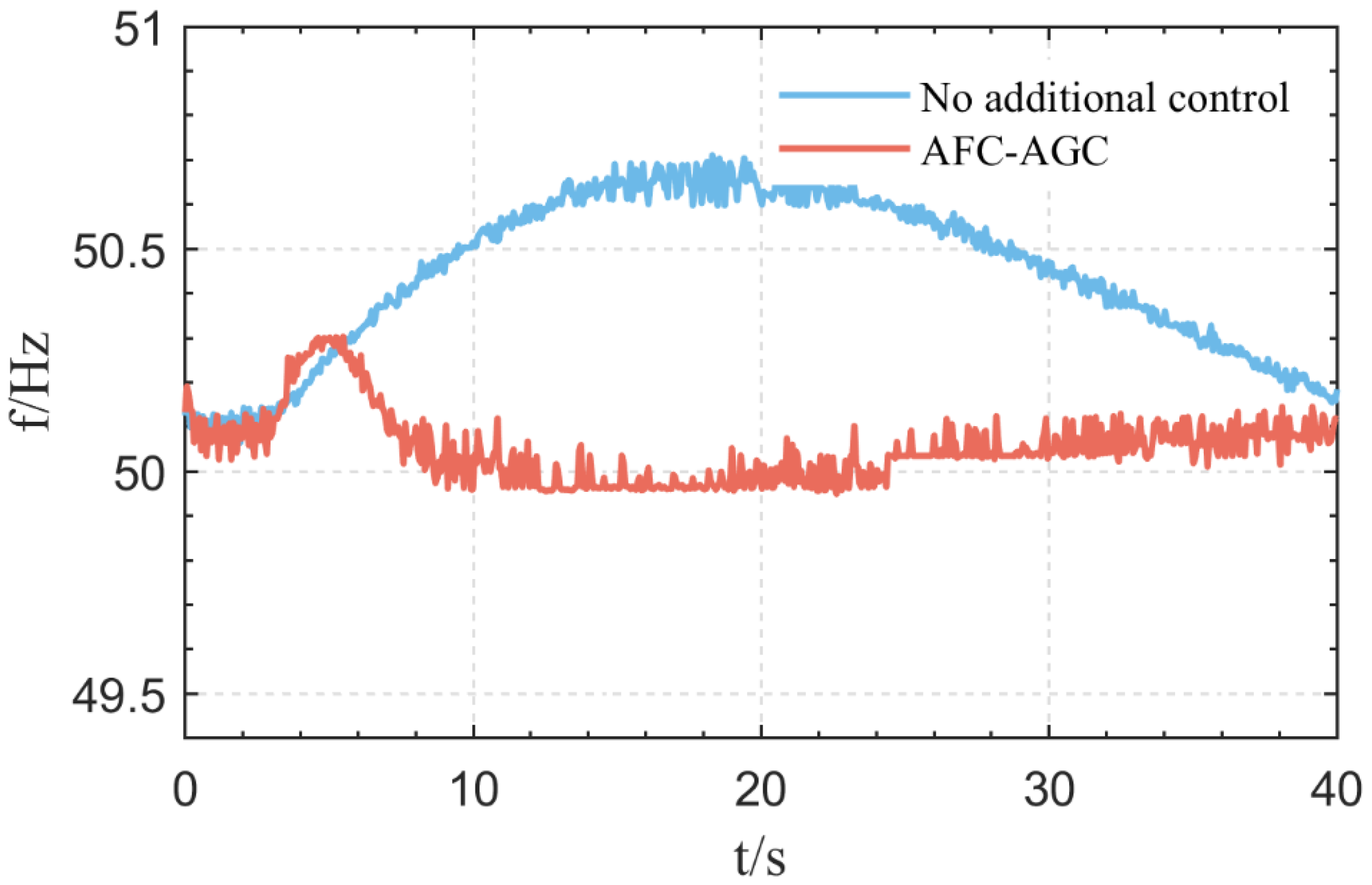
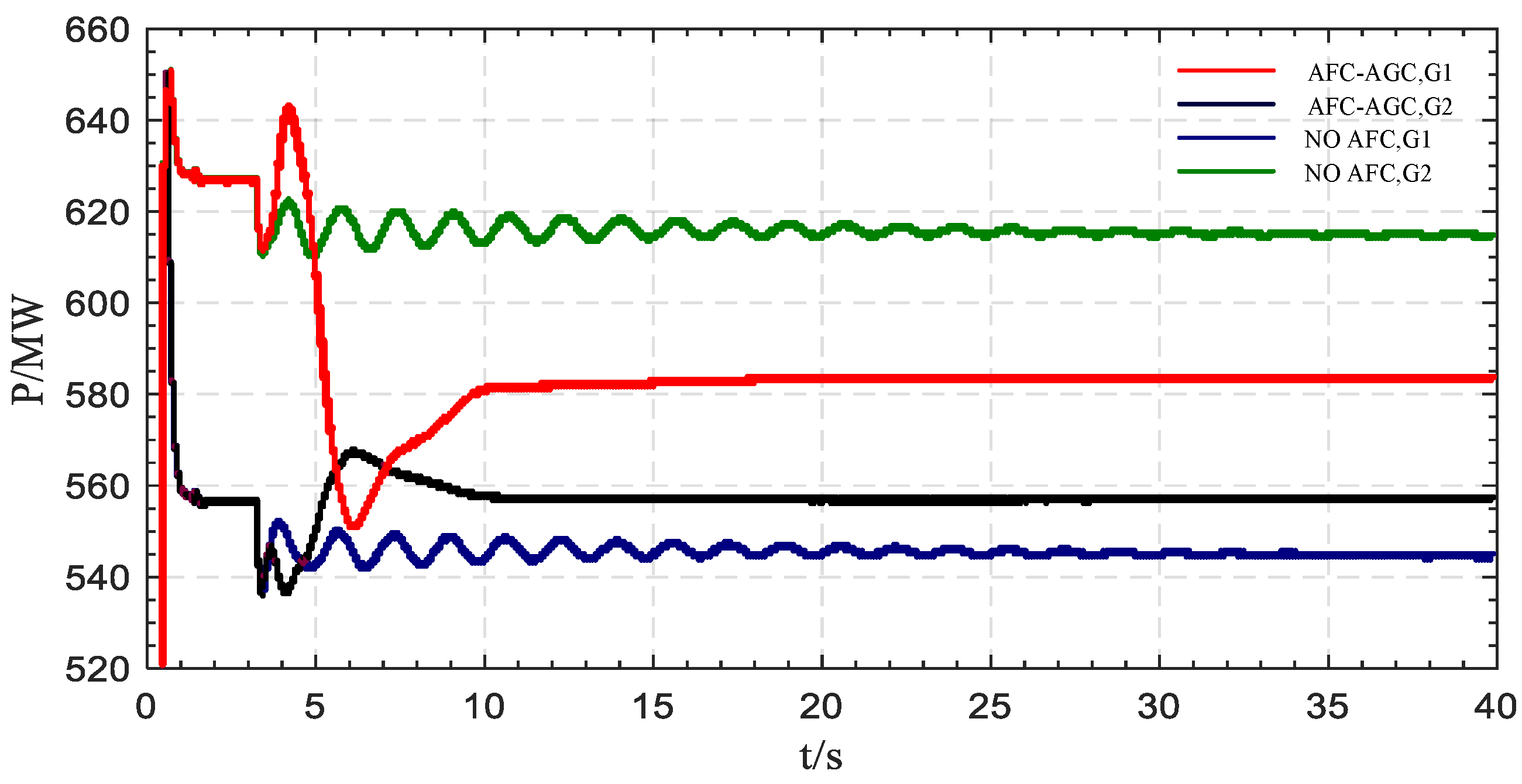
5.4. Case 2: Sudden Load Change
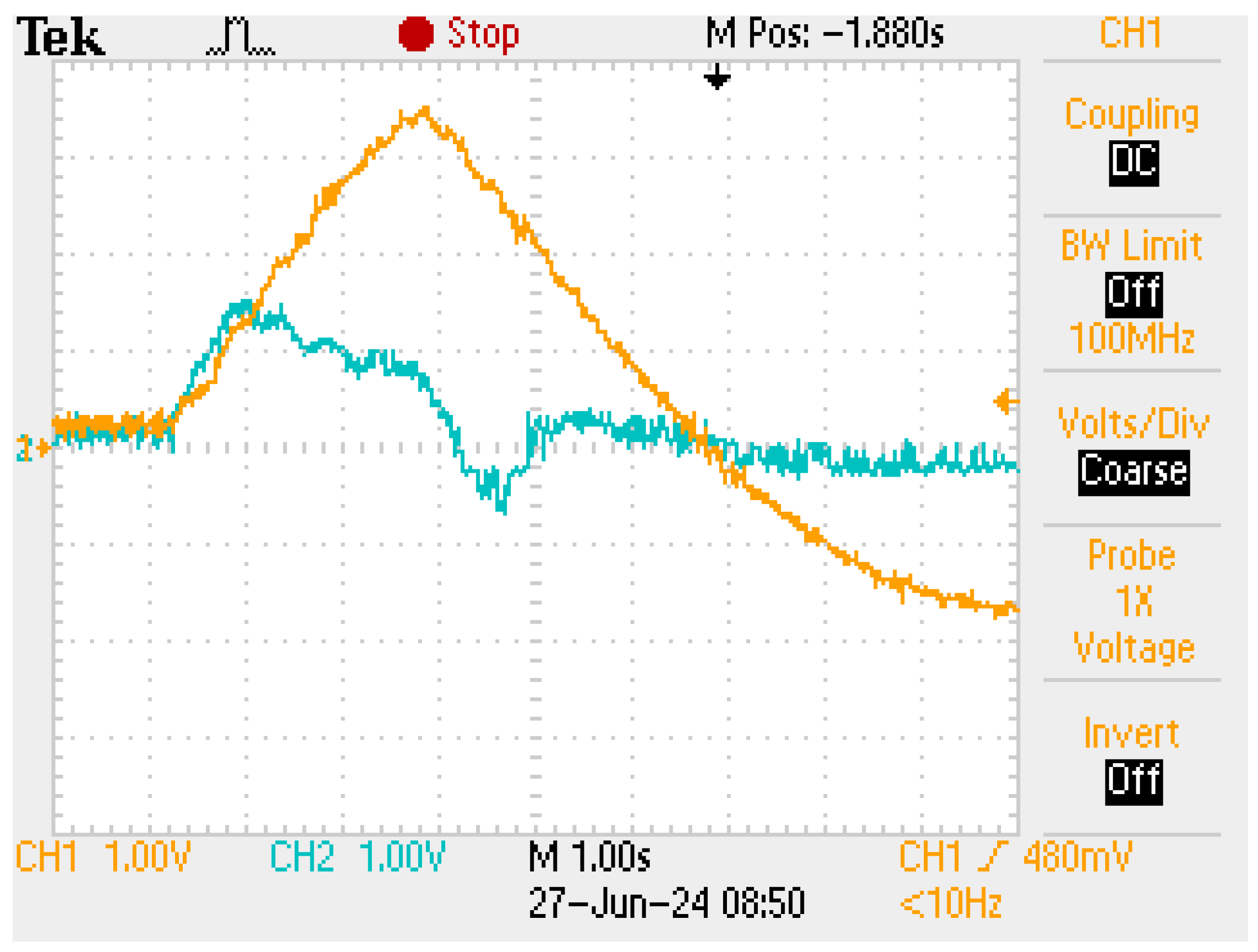
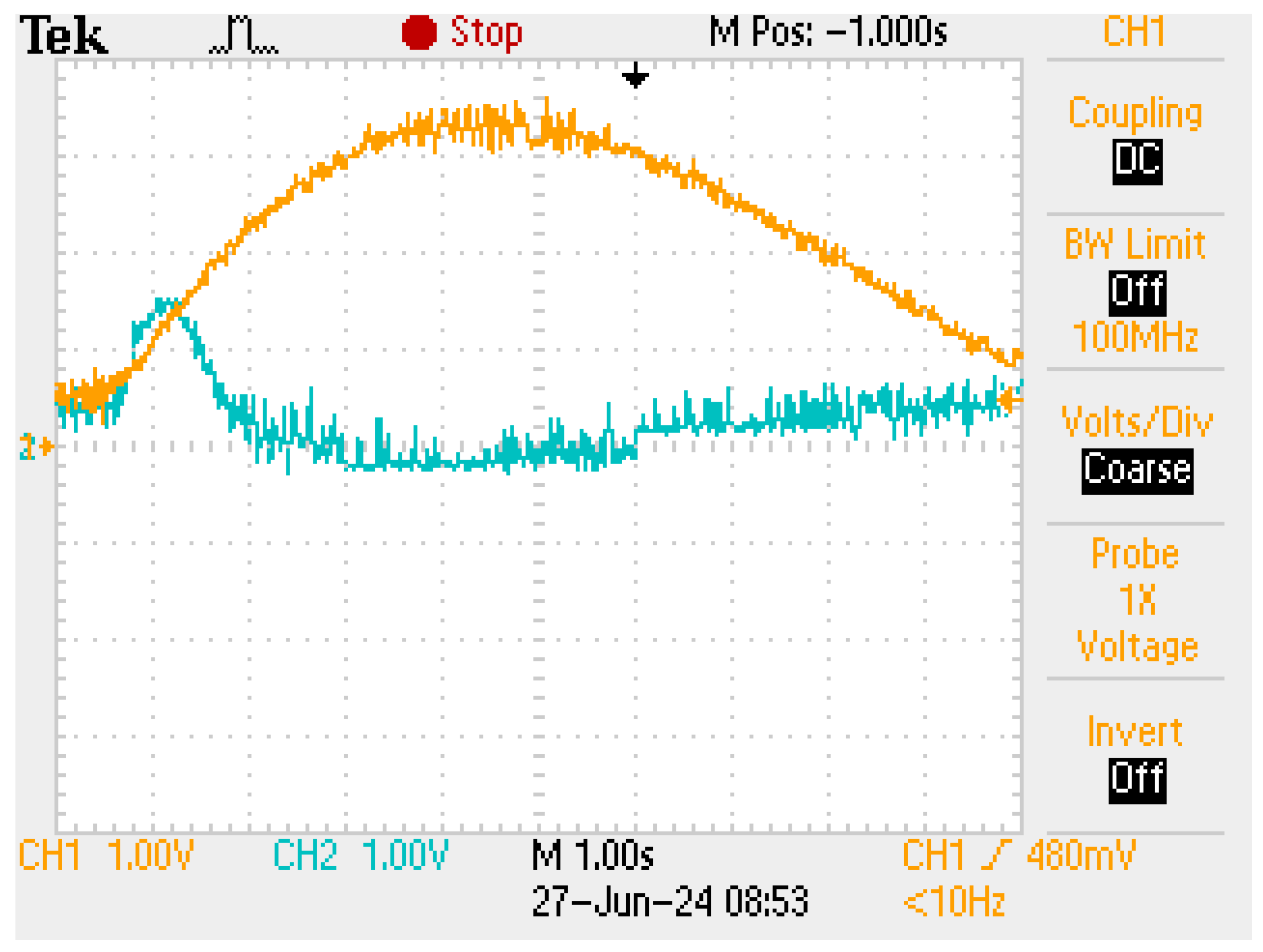
5.5. Experimental Verification
6. Conclusions
- The integration of large-scale wind power into the DC transmission system leads to continuous fluctuations in wind power output, significantly disturbing the system’s active power and adversely affecting the system’s frequency stability. Consequently, the primary frequency regulation of the system is no longer sufficient to meet the requirements. Therefore, utilizing the rapid controllability of DC transmission power provides a new perspective for improving the frequency regulation performance of the system.
- The control strategy, coordinated by both AFC and AGC, effectively mitigates the frequency fluctuations caused by the persistent and intense fluctuations of wind power output. Simultaneously, it demonstrates good frequency control performance under other disturbances, such as load mutations, thus enhancing the frequency stability of DC transmission systems integrated with wind power.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LCC | Line commutated converter |
| AFC | Auxiliary frequency control |
| AGC | Automatic generation control |
| VFF-RLS | Variable forgetting factor recursive least squares |
| DQN | Deep Q-network |
| VSC | Voltage source converter |
| ADC | Adaptive DC voltage droop control |
| HVDC | High-voltage direct current |
| MTDC | Multi-terminal direct current |
| DL | Deep learning |
| RL | Reinforcement learning |
| ACE | Area control error |
| PI | Proportional integral |
| ITAE | Integrated time absolute error |
References
- Xing, C.; Liu, M.; Peng, J.; Wang, Y.; Shang, C.; Zheng, Z.; Liao, J.; Gao, S. Frequency Stability Control Strategy for Voltage Source Converter-Based Multi-Terminal DC Transmission System. Energies 2024, 17, 1195. [Google Scholar] [CrossRef]
- Fang, P.; Fu, W.; Wang, K.; Xiong, D.; Zhang, K. A compositive architecture coupling outlier correction, EWT, nonlinear Volterra multi-model fusion with multi-objective optimization for short-term wind speed forecasting. Appl. Energy 2022, 307, 118–191. [Google Scholar] [CrossRef]
- Pali, B.S.; Vadhera, S. An Innovative Continuous Power Generation System Comprising of Wind Energy along with Pumped-Hydro Storage and Open Well. IEEE Trans. Sustain. Energy 2020, 11, 145–153. [Google Scholar] [CrossRef]
- Wang, J.; Liao, Y.; Han, W.; Ding, J.; Yang, W. Modeling and active power control characteristics of pumped storage-wind hybrid power system in the context of peak carbon dioxide emission. Water Resour. Hydropower Eng. 2021, 52, 172–181. [Google Scholar]
- Zhu, B.; Liu, Y.; Zhi, S.; Wang, K.; Liu, J. A Family of Bipolar High Step-Up Zeta–Buck–Boost Converter Based on “Coat Circuit”. IEEE Trans. Power Electron. 2023, 38, 3328–3339. [Google Scholar] [CrossRef]
- Yang, N.; Dong, Z.; Wu, L.; Zhang, L.; Shen, X.; Chen, D.; Zhu, B.; Liu, Y. A Comprehensive Review of Security-constrained Unit Commitment. J. Mod. Power Syst. Clean Energy 2022, 10, 562–576. [Google Scholar] [CrossRef]
- Xing, C.; Liu, M.; Peng, J.; Wang, Y.; Liao, J.; Zheng, Z.; Gao, S.; Guo, C. LCC-HVDC Frequency Robust Control Strategy Based on System Parameter Identification in Islanded Operation Mode. Electronics 2024, 13, 951. [Google Scholar] [CrossRef]
- Wang, W.; Li, Y.; Cao, Y.; Häger, U.; Rehtanz, C. Adaptive Droop Control of VSC-MTDC System for Frequency Support and Power Sharing. IEEE Trans. Power Syst. 2018, 33, 1264–1274. [Google Scholar] [CrossRef]
- Xisheng, T.; Fufeng, M.; Zhiping, Q.I.; Huimin, H.E.; Tao, W.U.; Shanying, L.I. Survey on Frequency Control of Wind Power. Proc. CSEE 2014, 34, 4304–4314. [Google Scholar]
- Curtice, D.H.; Reddoch, T.W. An Assessment of Load Frequency Control Impacts Caused by Small Wind Turbines. IEEE Trans. Power Appar. Syst. 1983, PAS-102, 162–170. [Google Scholar]
- Machowski, J.; Bialek, J.W.; Bumby, J.R. Power System Dynamics; Wiley: Hoboken, NJ, USA, 2013. [Google Scholar]
- Meza, J.L.; Santibanez, V.; Soto, R.; Llama, M.A. Fuzzy Self-Tuning PID Semiglobal Regulator for Robot Manipulators. IEEE Trans. Ind. Electron. 2012, 59, 2709–2717. [Google Scholar] [CrossRef]
- Hong, Z.; Xu, W.; Lv, C.; Ouyang, Q.; Wang, Z. Deep reinforcement learning-PI control strategy of air servo system based on genetic algorithm optimization. J. Mech. Electr. Eng. 2023, 40, 1071–1078. [Google Scholar]
- Shi, J.; Li, S.; Zhao, N.; Xu, M. Constrained Adaptive PI Control of Inverter based on Neural Network. Acta Energiae Solaris Sinca 2023, 44, 19–27. [Google Scholar]
- Li, B.; Wang, J.; Liang, S.; Wei, C. AGC real-time control strategy based on LSTM recurrent neural network. Electr. Power Autom. Equip. 2022, 42, 128–134. [Google Scholar]
- Liu, H.; Xu, F.; Fan, P.; Liu, L.; Wen, H.; Qiu, Y.; Ke, S.; Li, Y.; Yang, J. Load Frequency Control Strategy of Island Microgrid with Flexible Resources Based on DQN. In Proceedings of the 2021 IEEE Sustainable Power and Energy Conference (iSPEC), Nanjing, China, 23–25 December 2021; pp. 632–637. [Google Scholar]
- Jiang, B.; Wang, Q.; Wu, S.; Wang, Y.; Lu, G. Advancements and Future Directions in the Application of Machine Learning to AC Optimal Power Flow: A Critical Review. Energies 2024, 17, 1381. [Google Scholar] [CrossRef]
- Zhou, X.; Wang, Y.; Shi, Y.; Jiang, Q. Deep Reinforcement Learning-Based Optimal PMU Placement Considering the Degree of Power System Observability. IEEE Trans. Ind. Inform. 2024, 20, 8949–8960. [Google Scholar] [CrossRef]
- He, C.; Wang, H.; Wei, Z.; Wang, C. Distributed Coordinated Real-Time Control of Wind Farm and AGC Units. Proc. CSEE 2015, 35, 302–309. [Google Scholar]
- Xu, Y.; Mili, L.; Sandu, A.; von Spakovsky, M.R.; Zhao, J. Propagating Uncertainty in Power System Dynamic Simulations Using Polynomial Chaos. IEEE Trans. Power Syst. 2019, 34, 338–348. [Google Scholar] [CrossRef]
- Xu, Y.; Wang, Q.; Mili, L.; Zheng, Z.; Gu, W.; Lu, S.; Wu, Z. A Data-Driven Koopman Approach for Power System Nonlinear Dynamic Observability Analysis. IEEE Trans. Power Syst. 2023, 39, 4090–4104. [Google Scholar] [CrossRef]
- Yan, M.; Cai, H.; Xie, Z.; Zhang, Z.; Xu, Z. Distributed DC voltage control strategy for VSC-MTDC systems. Electr. Power Autom. Equip. 2020, 40, 134–140. [Google Scholar]
- Hu, J.; Zhao, C. In auxiliary frequency control of HVDC systems for wind power integration. In Proceedings of the 2010 5th International Conference on Critical Infrastructure (CRIS), Beijing, China, 20–22 September 2010; pp. 1–5. [Google Scholar]
- Rong, M.; Wu, H.; Wu, T.; Hou, X.; Zhang, J.; Yu, B. Improved V/F control strategy for enhancing stability of Direct-drive wind power with VSC-HVDC system. Power Syst. Technol. 2021, 45, 1698–1706. [Google Scholar]
- Aljabrine, A.A.; Smadi, A.A.; Chakhchoukh, Y.; Johnson, B.K.; Lei, H. Resiliency Improvement of an AC/DC Power Grid with Embedded LCC-HVDC Using Robust Power System State Estimation. Energies 2021, 14, 7847. [Google Scholar] [CrossRef]
- Kundur, P. Power System Stability and Control; CRC press: Boca Raton, FL, USA, 1994. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | Steps and Instructions | |
|---|---|---|
| 1 | Input Parameters | |
| 2 | Update Gain Matrix | |
| 3 | Update Parameters | |
| 4 | Update Covariance | |
| 5 | Calculate Parameter Error | |
| 6 | Update Forgetting Factor | |
| 7 | Output Online Identified Parameters | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hui, J.; Tai, K.; Yan, R.; Wang, Y.; Yuan, M.; Zheng, Z.; Gao, S.; Liao, J. Frequency Coordination Control Strategy for Large-Scale Wind Power Transmission Systems Based on Hybrid DC Transmission Technology with Deep Q Network Assistance. Appl. Sci. 2024, 14, 6817. https://doi.org/10.3390/app14156817
Hui J, Tai K, Yan R, Wang Y, Yuan M, Zheng Z, Gao S, Liao J. Frequency Coordination Control Strategy for Large-Scale Wind Power Transmission Systems Based on Hybrid DC Transmission Technology with Deep Q Network Assistance. Applied Sciences. 2024; 14(15):6817. https://doi.org/10.3390/app14156817
Chicago/Turabian StyleHui, Jianfeng, Keqiang Tai, Ruitao Yan, Yuhong Wang, Meng Yuan, Zongsheng Zheng, Shilin Gao, and Jianquan Liao. 2024. "Frequency Coordination Control Strategy for Large-Scale Wind Power Transmission Systems Based on Hybrid DC Transmission Technology with Deep Q Network Assistance" Applied Sciences 14, no. 15: 6817. https://doi.org/10.3390/app14156817