
Adaptive Truncation Threshold Determination for Multimode Fiber Single-Pixel Imaging

 ,
,
Abstract
1. Introduction
2. Method
2.1. Background: Measurement and Recovery
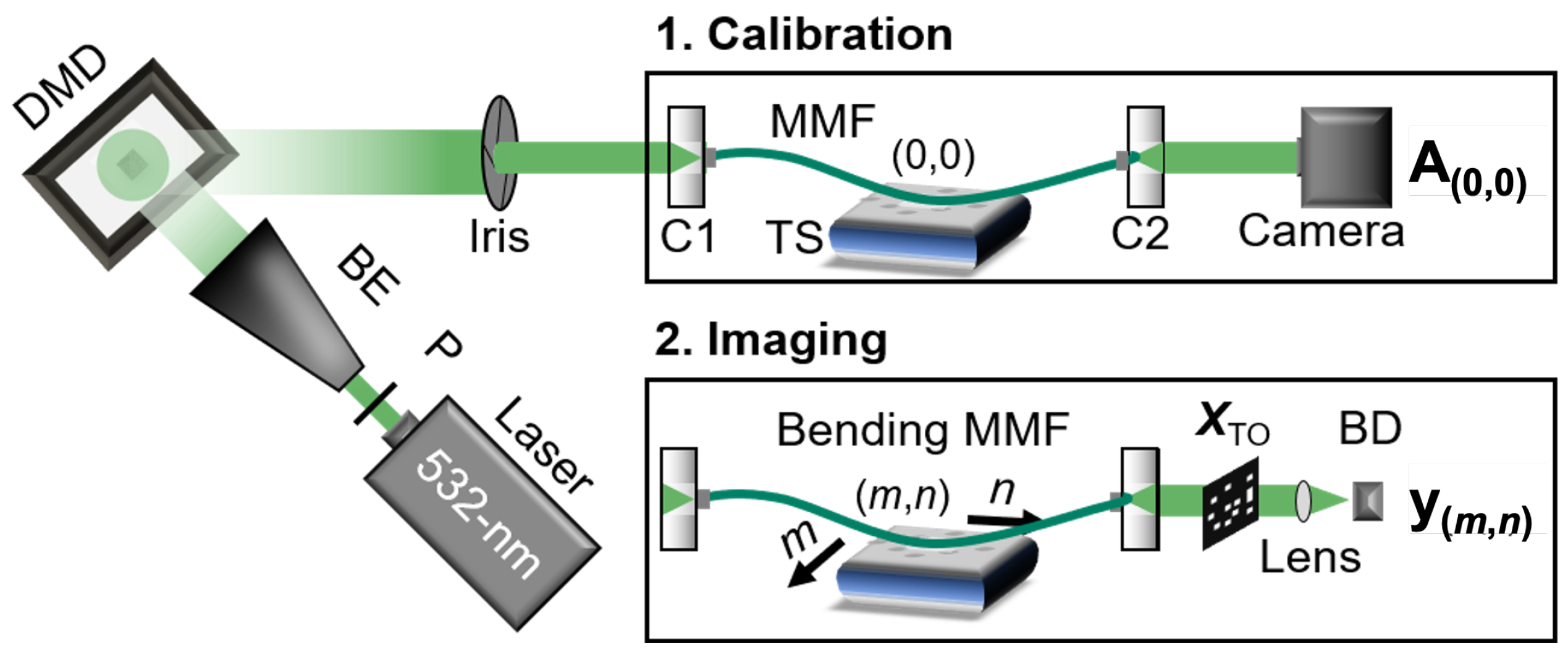
2.1.1. Measurement of Multimode Fiber Single-Pixel Imaging (MMF-SPI)
2.1.2. Recovery via Truncated Singular Value Decomposition (TSVD)
2.2. Proposed Method: Adaptive Truncation Threshold Determination (ATTD)
- (1)
- Projection: Calculate the absolute value of decomposition coefficients ().
- (2)
- Sorting: Sort sequence in descending order to obtain and the corresponding index ().
- (3)
- Binary transformation: Apply a naïve test function to binary as follows:
- (4)
- Accumulated average: Compute the accumulated average of the first k values of as follows:where the sequence generally decreases with k.
- (5)
- Determination: Determine the truncation threshold via the maximum index when the accumulated average () is larger than a certain proportion of its maximum, i.e., .
| Algorithm 1 ATTD) |
|
2.3. Experimental Design, Implementation, and Evaluation
2.3.1. Overall Experimental Design
- (1)
- Adaptation to varying noise levels: First, we conducted imaging experiments using both simulated BD sequences with adjustable noise levels and real BD sequences disturbed by a bending MMF to verify adaption to noise variations in ATTD. For the results, please refer to the first two parts of Section 3. Note that we assume that the noise generated via fiber bending in MMF-SPI is equivalent to the Gaussian additive noise added in BD sequences. The rationale for this approximation is explained in Section 4.
- (2)
- Target insensitivity: Secondly, due to experimental constraints, we conducted experiments on simulated BD sequences generated from different targets (USC-SIP image database containing 210 images [42]) with varying noise levels to verify the object insensitivity of ATTD. For the results, please refer to the third part of Section 3.
- (3)
- Stability of the TOL parameters: Finally, we investigated whether the self-contained TOL parameters calibrated with one measurement matrix are applicable to other measurement matrices. For the results, please refer to the forth part of Section 3.
2.3.2. Implementation of Dynamically Changing Noise Levels
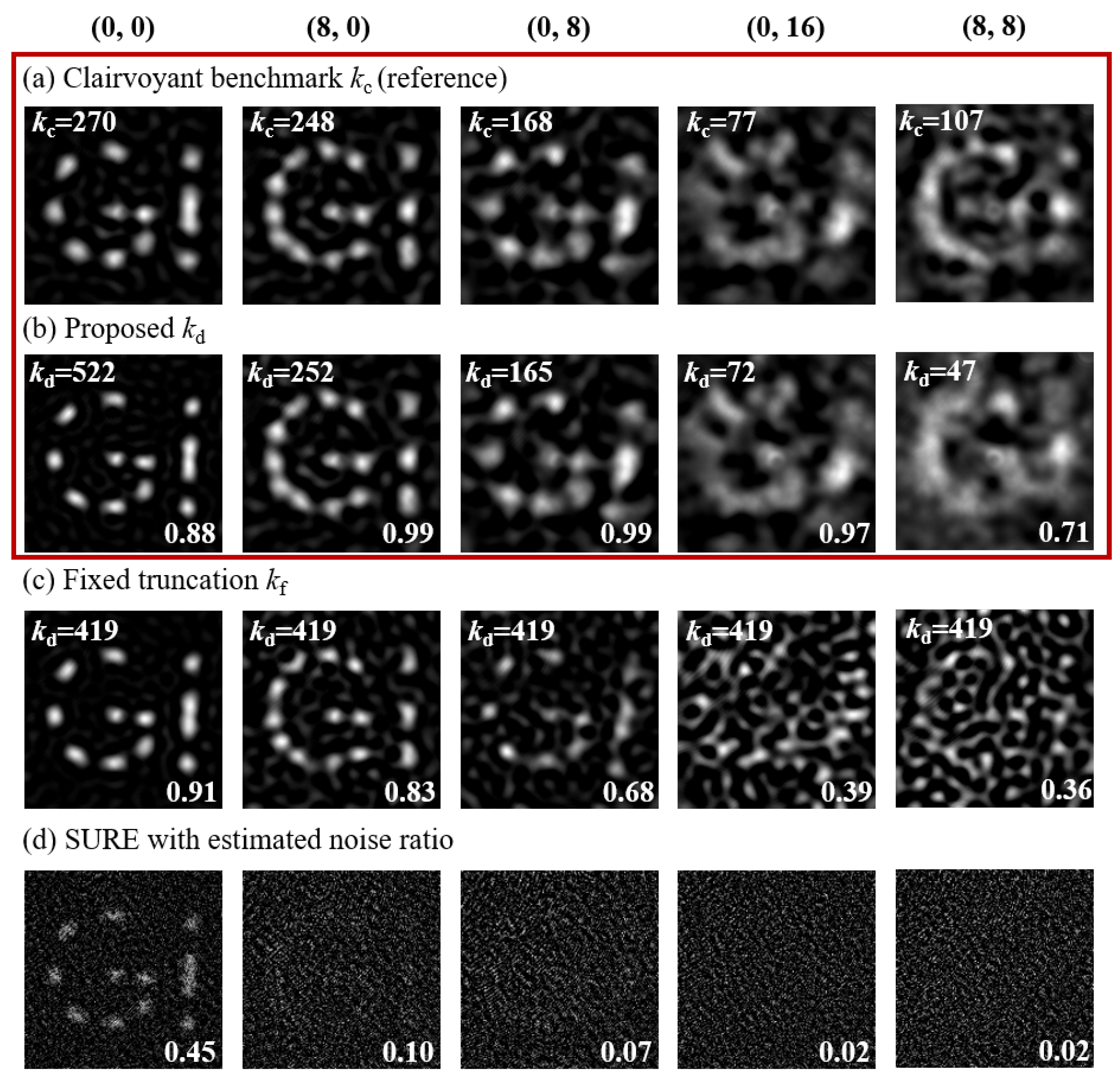
2.3.3. Performance Evaluation via Clairvoyant Benchmark
2.3.4. Comparative Truncation Threshold Determination Methods
3. Results
3.1. Adapting Dynamical Noise Changes in Simulations
3.2. Adapting the Dynamical Change in Noise in Practical Experiments
3.3. Adapting the Change in Simulated Targets
3.4. Robustness of TOL Parameter
3.5. Comparison of Computational Times with Traditional Threshold Methods
4. Discussion
4.1. The Assumption of Equivalence between Fiber Bending Impact and Gaussian Noise Added to the Bucket Detector Signal
4.2. Recovery Comparison with Machine Learning-Based Diffusion Models
4.3. The Design Goal of ATTD
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MMF | Multimode fiber; |
| SPI | Single-pixel imaging; |
| CS | Compression sensing; |
| TSVD | Truncated singular value decomposition; |
| GCV | Generalized cross-validation; |
| SURE | Stein’s unbiased risk estimator; |
| SV | Singular value; |
| ATTD | Adaptive truncation threshold determination; |
| BD | Bucket detector. |
Appendix A. Self-Contained Parameter Determination for ATTD
- (1)
- As shown in Algorithm A1, VAR determination is based on the cumulative average of the index difference before and after sorting the projection amplitude, i.e., ||, where k contains only those vectors with an SV larger than 1% of the maximum, i.e., the most significant singular vectors. Although VAR seems to be arbitrary, the choice of a suitable TOL can compensate for this.
| Algorithm A1 Self-contained VAR determination |
|
- (2)
- As Algorithm A2 shows, several TOL values were tested in ATTD with normally distributed simulated noise () [44] and tuned via the Euclidean norm of software-masked BD sequence , the number of measurements (), and a given amplitude ratio (dB) [45]. A suitable TOL value can be chosen by comparing the ATTD output () and the clairvoyant benchmark (), given a certain noise level. Determining requires the target ground truth () and the quality assessment image’s signal-to-noise ratio (isnr).where averages over all pixels, and and are normalized by the sum of all pixel values.
| Algorithm A2 Self-contained TOL determination |
|

Appendix B. Comparative Truncation Threshold Determination Methods
- (1)
- According to the direct singular value sequence (), the fixed truncation threshold is commonly set aswhere . Then, the recovered target is
- (2)
- SURE has long been adopted as the state-of-the-art threshold selection mechanism [40]. First, the noisy BD signal () is projected onto an orthogonal matrix () obtained via the SVD of measurement matrix to obtain the amplitude (), which is then reinforced by a specified value (t), i.e., the soft threshold [46].where sgn() is the signum function and . The SURE function denotes the cost as follows:where is the number of amplitudes with an absolute value of no more than t, and = . The noise power () can be estimated via the median absolute deviation in practical experiments [46], or it can be specified beforehand in simulations. Note that the value of the cost of SURE(t, ) only changes when threshold t changes from one amplitude to another; thus, iterating all amplitudes would produce the optimal as follows:
References
- Čižmár, T.; Dholakia, K. Exploiting multimode waveguides for pure fibre-based imaging. Nat. Commun. 2012, 3, 1027. [Google Scholar] [CrossRef] [PubMed]
- Plöschner, M.; Tyc, T.; Čižmár, T. Seeing through chaos in multimode fibres. Nat. Photonics 2015, 9, 529–535. [Google Scholar] [CrossRef]
- Psaltis, D.; Moser, C. Imaging with multimode fibers. Opt. Photonics News 2016, 27, 24–31. [Google Scholar] [CrossRef]
- Caravaca-Aguirre, A.M.; Piestun, R. Single multimode fiber endoscope. Opt. Express 2017, 25, 1656–1665. [Google Scholar] [CrossRef] [PubMed]
- Ohayon, S.; Caravaca-Aguirre, A.M.; Piestun, R.; DiCarlo, J.J. Minimally invasive multimode optical fiber microendoscope for deep brain fluorescence imaging. Biomed. Opt. Express 2018, 9, 1492–1509. [Google Scholar] [CrossRef] [PubMed]
- Stellinga, D.; Phillips, D.B.; Mekhail, S.P.; Selyem, A.; Turtaev, S.; Čižmár, T.; Padgett, M.J. Time-of-flight 3D imaging through multimode optical fibers. Science 2021, 374, 1395–1399. [Google Scholar] [CrossRef] [PubMed]
- Hughes, M.; Chang, T.P.; Yang, G.-Z. Fiber bundle endocytoscopy. Biomed. Opt. Express 2013, 4, 2781–2794. [Google Scholar] [CrossRef] [PubMed]
- Wood, H.A.C.; Harrington, K.; Birks, T.A.; Knight, J.C.; Stone, J.M. High-resolution air-clad imaging fibers. Opt. Lett. 2018, 43, 5311–5314. [Google Scholar] [CrossRef] [PubMed]
- Papadopoulos, I.N.; Farahi, S.; Moser, C.; Psaltis, D. Focusing and scanning light through a multimode optical fiber using digital phase conjugation. Opt. Express 2012, 20, 10583–10590. [Google Scholar] [CrossRef]
- Papadopoulos, I.N.; Farahi, S.; Moser, C.; Psaltis, D. High-resolution, lensless endoscope based on digital scanning through a multimode optical fiber. Biomed. Opt. Express 2013, 4, 260–270. [Google Scholar] [CrossRef]
- Čižmár, T.; Dholakia, K. Shaping the light transmission through a multimode optical fibre: Complex transformation analysis and applications in biophotonics. Opt. Express 2011, 19, 18871–18884. [Google Scholar] [CrossRef] [PubMed]
- Choi, Y.; Yoon, C.; Kim, M.; Yang, T.D.; Fang-Yen, C.; Dasari, R.R.; Lee, K.J.; Choi, W. Scanner-free and wide-field endoscopic imaging by using a single multimode optical fiber. Phys. Rev. Lett. 2012, 109, 203901. [Google Scholar] [CrossRef] [PubMed]
- Duarte, M.F.; Davenport, M.A.; Takhar, D.; Laska, J.N.; Sun, T.; Kelly, K.F.; Baraniuk, R.G. Single-pixel imaging via compressive sampling. IEEE Signal Process. Mag. 2008, 25, 83–91. [Google Scholar] [CrossRef]
- Pittman, T.B.; Shih, Y.H.; Strekalov, D.V.; Sergienko, A.V. Optical imaging by means of two-photon quantum entanglement. Phys. Rev. A 1995, 52, R3429. [Google Scholar] [CrossRef] [PubMed]
- Borhani, N.; Kakkava, E.; Moser, C.; Psaltis, D. Learning to see through multimode fibers. Optica 2018, 5, 960–966. [Google Scholar] [CrossRef]
- Rahmani, B.; Loterie, D.; Konstantinou, G.; Psaltis, D.; Moser, C. Multimode optical fiber transmission with a deep learning network. Light Sci. Appl. 2018, 7, 69. [Google Scholar] [CrossRef] [PubMed]
- Caramazza, P.; Moran, O.; Murray-Smith, R.; Faccio, D. Transmission of natural scene images through a multimode fibre. Nat. Commun. 2019, 10, 2029. [Google Scholar] [CrossRef] [PubMed]
- Zhu, C.; Chan, E.A.; Wang, Y.; Peng, W.; Guo, R.; Zhang, B.; Soci, C.; Chong, Y. Image reconstruction through a multimode fiber with a simple neural network architecture. Sci. Rep. 2021, 11, 896. [Google Scholar] [CrossRef]
- Amitonova, L.V.; Boer, J.F.D. Compressive imaging through a multimode fiber. Opt. Lett. 2018, 43, 5427–5430. [Google Scholar] [CrossRef]
- Caravaca-Aguirre, A.M.; Singh, S.; Labouesse, S.; Baratta, M.V.; Piestun, R.; Bossy, E. Hybrid photoacoustic-fluorescence microendoscopy through a multimode fiber using speckle illumination. APL Photonics 2019, 4, 096103. [Google Scholar] [CrossRef]
- Lan, M.; Guan, D.; Gao, L.; Li, J.; Yu, S.; Wu, G. Robust compressive multimode fiber imaging against bending with enhanced depth of field. Opt. Express 2019, 27, 12957–12962. [Google Scholar] [CrossRef]
- Zhu, R.-z.; Feng, H.-g.; Xiong, Y.-f.; Zhan, L.-w.; Xu, F. All-fiber reflective single-pixel imaging with long working distance. Opt. Laser Technol. 2023, 158, 108909. [Google Scholar] [CrossRef]
- Lochocki, B.; Abrashitova, K.; de Boer, J.F.; Amitonova, L.V. Ultimate resolution limits of speckle-based compressive imaging. Opt. Express 2021, 29, 3943–3955. [Google Scholar] [CrossRef]
- Abrashitova, K.; Amitonova, L.V. High-speed label-free multimode-fiber-based compressive imaging beyond the diffraction limit. Opt. Express 2022, 30, 10456–10469. [Google Scholar] [CrossRef] [PubMed]
- Mahalati, R.N.; Gu, R.Y.; Kahn, J.M. Resolution limits for imaging through multi-mode fiber. Opt. Express 2013, 21, 1656–1668. [Google Scholar] [CrossRef]
- Gu, R.Y.; Mahalati, R.N.; Kahn, J.M. Noise-reduction algorithms for optimization-based imaging through multi-mode fiber. Opt. Express 2014, 22, 15118–15132. [Google Scholar] [CrossRef] [PubMed]
- Fukui, T.; Kohno, Y.; Tang, R.; Nakano, Y.; Tanemura, T. Single-pixel imaging using multimode fiber and silicon photonic phased array. J. Lightwave Technol. 2020, 39, 839–844. [Google Scholar] [CrossRef]
- Fukui, T.; Nakano, Y.; Tanemura, T. Resolution limit of single-pixel speckle imaging using multimode fiber and optical phased array. J. Opt. Soc. Am. B 2021, 38, 379–386. [Google Scholar] [CrossRef]
- Bian, L.; Suo, J.; Dai, Q.; Chen, F. Experimental comparison of single-pixel imaging algorithms. J. Opt. Soc. Am. A 2018, 35, 78–87. [Google Scholar] [CrossRef]
- Rizvi, S.; Cao, J.; Zhang, K.; Hao, Q. Deringing and denoising in extremely under-sampled Fourier single pixel imaging. Opt. Express 2020, 28, 7360–7374. [Google Scholar] [CrossRef]
- Abdulaziz, A.; Mekhail, S.P.; Altmann, Y.; Padgett, M.J.; McLaughlin, S. Robust real-time imaging through flexible multimode fibers. Sci. Rep. 2023, 13, 11371. [Google Scholar] [CrossRef]
- Fan, P.; Wang, Y.; Ruddlesden, M.; Wang, X.; Thaha, M.A.; Sun, J.; Zuo, C.; Su, L. Deep learning enabled scalable calibration of a dynamically deformed multimode fiber. Adv. Photonics Res. 2022, 3, 2100304. [Google Scholar] [CrossRef]
- Zhu, R.; Luo, J.; Zhou, X.; Feng, H.; Xu, F. Anti-perturbation Multimode Fiber Imaging Based on the Active Measurement of the Fiber Configuration. ACS Photonics 2023, 10, 3476–3483. [Google Scholar] [CrossRef]
- Yang, D.; Hao, M.; Wu, G.; Chang, C.; Luo, B.; Yin, L. Single multimode fiber imaging based on low-rank recovery. Opt. Lasers Eng. 2022, 149, 106827. [Google Scholar] [CrossRef]
- Lan, M.; Xiang, Y.; Li, J.; Gao, L.; Liu, Y.; Wang, Z.; Yu, S.; Wu, G.; Ma, J. Averaging speckle patterns to improve the robustness of compressive multimode fiber imaging against fiber bend. Opt. Express 2020, 28, 13662–13669. [Google Scholar] [CrossRef]
- Xiang, Y.; Hu, X.; Li, R.; Li, J.; Lan, M.; Ma, J.; Gao, L. Noise estimation via the optimal truncation variation for multimode fiber single-pixel imaging. In 3D Image Acquisition and Display: Technology, Perception and Applications; Optica Publishing Group: Washington, DC, USA, 2022; p. JW5C-5. [Google Scholar]
- Hansen, P.C.; O’Leary, D.P. The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Hansen, P.C.; Jensen, T.K.; Rodriguez, G. An adaptive pruning algorithm for the discrete L-curve criterion. J. Comput. Appl. Math. 2007, 198, 483–492. [Google Scholar] [CrossRef]
- Hansen, P.C. Discrete Inverse Problems: Insight and Algorithms; SIAM: Philadelphia, PA, USA, 2010. [Google Scholar]
- Stein, C.M. Estimation of the mean of a multivariate normal distribution. Ann. Stat. 1981, 9, 1135–1151. [Google Scholar] [CrossRef]
- Hansen, P.C. The truncated SVD as a method for regularization. BIT Numer. Math. 1987, 27, 534–553. [Google Scholar] [CrossRef]
- Sipi Image Database. Available online: http://sipi.usc.edu/database/ (accessed on 27 January 2023).
- Jalal, A.; Arvinte, M.; Daras, G.; Price, E.; Dimakis, A.G.; Tamir, J. Robust compressed sensing mri with deep generative priors. Adv. Neural Inf. Process. Syst. 2021, 34, 14938–14954. [Google Scholar]
- MATLAB, Normally Distributed Random Numbers. Available online: https://www.mathworks.com/help/matlab/ref/randn.html (accessed on 27 January 2023).
- Choudhury, D.; McNicholl, D.K.; Repetti, A.; Gris-Sánchez, I.; Li, S.; Phillips, D.B.; Whyte, G.; Birks, T.A.; Wiaux, Y.; Thomson, R.R. Computational optical imaging with a photonic lantern. Nat. Commun. 2020, 11, 5217. [Google Scholar] [CrossRef] [PubMed]
- Donoho, D.L.; Johnstone, I.M. Adaping to unknown smoothness via wavelet shrinkage. J. Am. Stat. Assoc. 1995, 90, 1200–1224. [Google Scholar] [CrossRef]
- Luisier, F.; Blu, T.; Unser, M. A new SURE approach to image denoising: Interscale orthonormal wavelet thresholding. IEEE Trans. Image Process. 2007, 16, 593–606. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| −70 dB | −35 dB | −30 dB | −20 dB | |
|---|---|---|---|---|
| ATTD | 0.97 | 0.78 | 0.64 | 0.49 |
| Fixed | 0.93 | 0.51 | 0.34 | 0.14 |
| SURE | 0.63 | 0.03 | 0.02 | 0.02 |
| −70 dB | −35 dB | −30 dB | −20 dB | |
|---|---|---|---|---|
| 0.98 | 0.77 | 0.63 | 0.48 | |
| 0.97 | 0.78 | 0.65 | 0.48 | |
| 0.98 | 0.77 | 0.63 | 0.46 |
| L-Curve | GCV | SURE | ATTD | Fixed | |
|---|---|---|---|---|---|
| computational time (s) | 76 | 75 | 0.04 | 0.013 | 0.002 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiang, Y.; Li, J.; Lan, M.; Yang, L.; Hu, X.; Ma, J.; Gao, L. Adaptive Truncation Threshold Determination for Multimode Fiber Single-Pixel Imaging. Appl. Sci. 2024, 14, 6875. https://doi.org/10.3390/app14166875
Xiang Y, Li J, Lan M, Yang L, Hu X, Ma J, Gao L. Adaptive Truncation Threshold Determination for Multimode Fiber Single-Pixel Imaging. Applied Sciences. 2024; 14(16):6875. https://doi.org/10.3390/app14166875
Chicago/Turabian StyleXiang, Yangyang, Junhui Li, Mingying Lan, Le Yang, Xingzhuo Hu, Jianxin Ma, and Li Gao. 2024. "Adaptive Truncation Threshold Determination for Multimode Fiber Single-Pixel Imaging" Applied Sciences 14, no. 16: 6875. https://doi.org/10.3390/app14166875
APA StyleXiang, Y., Li, J., Lan, M., Yang, L., Hu, X., Ma, J., & Gao, L. (2024). Adaptive Truncation Threshold Determination for Multimode Fiber Single-Pixel Imaging. Applied Sciences, 14(16), 6875. https://doi.org/10.3390/app14166875