
A Similarity Clustering Deformation Prediction Model Based on GNSS/Accelerometer Time-Frequency Analysis


Abstract
1. Introduction
- (1)
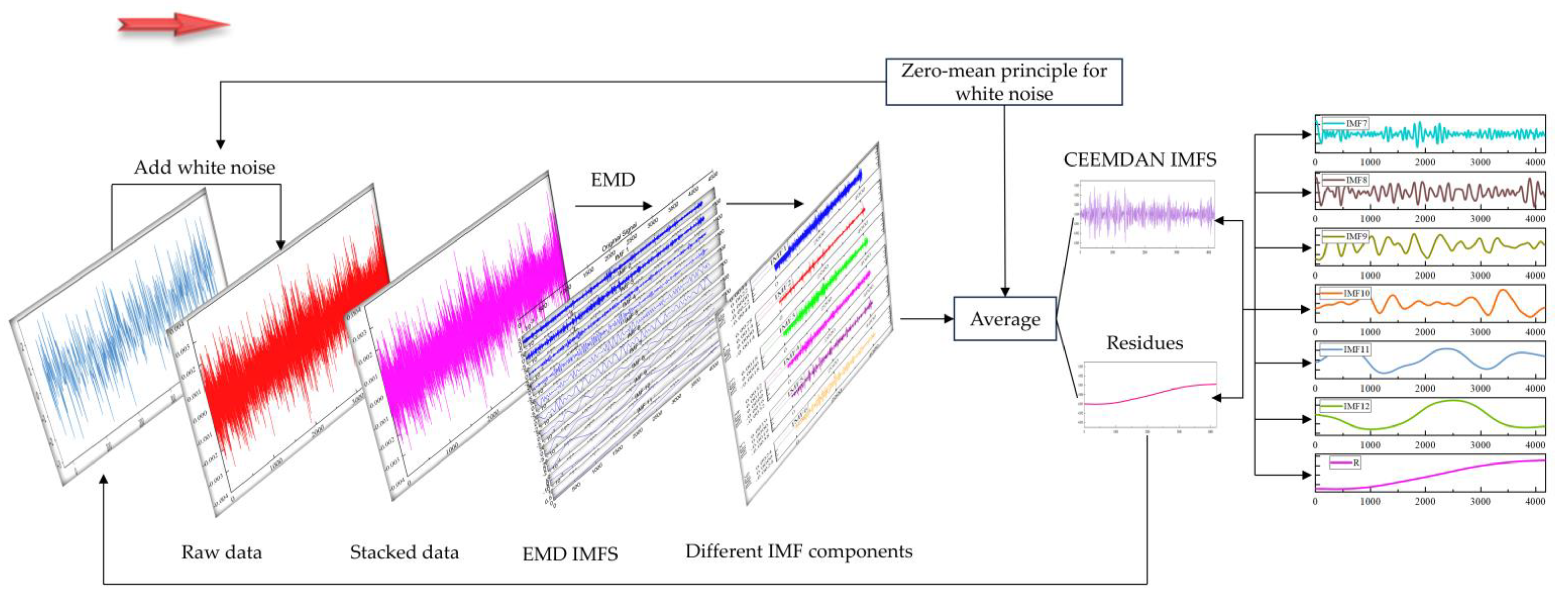
- The CEEMDAN algorithm is employed to decompose the original monitoring data, effectively reducing the nonlinearity and randomness of the deformation sequence and establishing the time-frequency characteristics of the deformation data.
- (2)
- A similarity clustering algorithm is proposed to cluster monitoring sub-sequences based on frequency domain features. The reconstruction and integration of monitoring sequences are accomplished. The novelty of this algorithm lies in its adoption of clustering analysis, a method that effectively captures key features of structural deformation processes, thereby significantly enhancing data processing efficiency.
- (3)
- A CEEMDAN-SC-LSTM deformation prediction model based on GNSS/accelerometer time-frequency analysis is proposed. Experimental results verify that the proposed model achieves a significant improvement in the prediction performance.
2. Materials and Methods
2.1. CEEMDAN
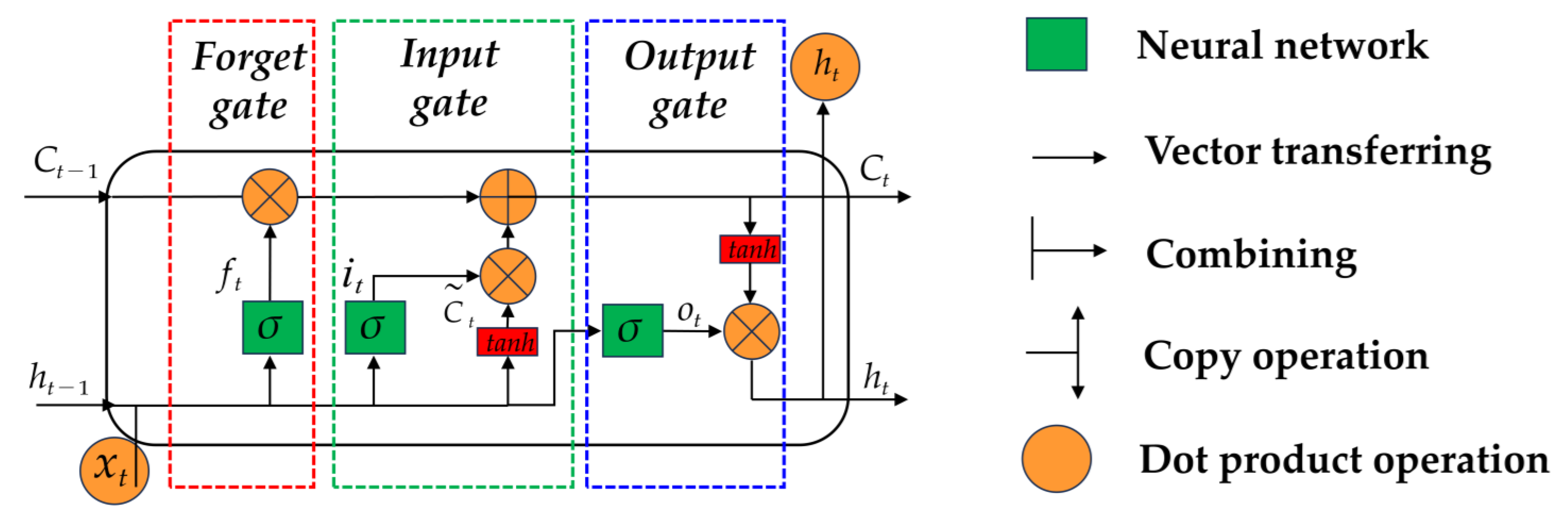
2.2. LSTM Networks
2.3. Clustering Methods
2.4. Framework of the CEEMDAN-SC-LSTM Prediction Method
2.5. Evaluation Metrics
3. Experimental Validation and Analysis
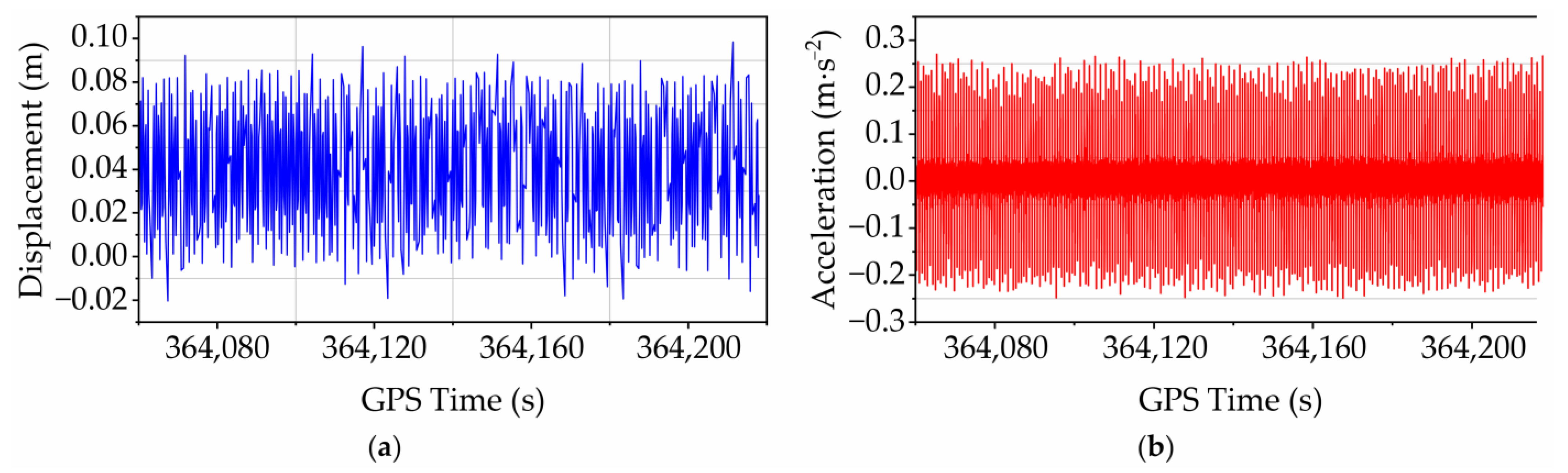
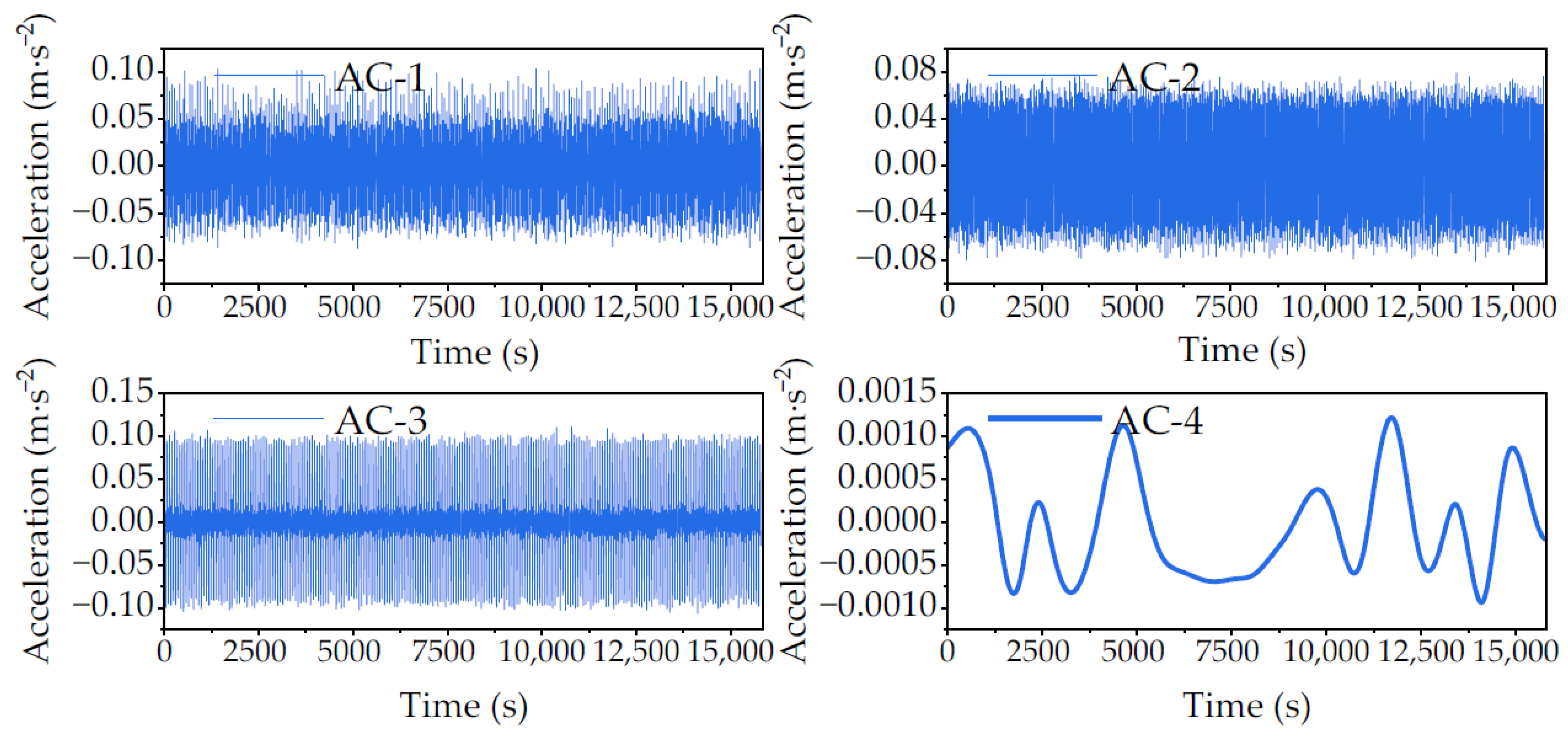
3.1. The Experiment of Shaking Table
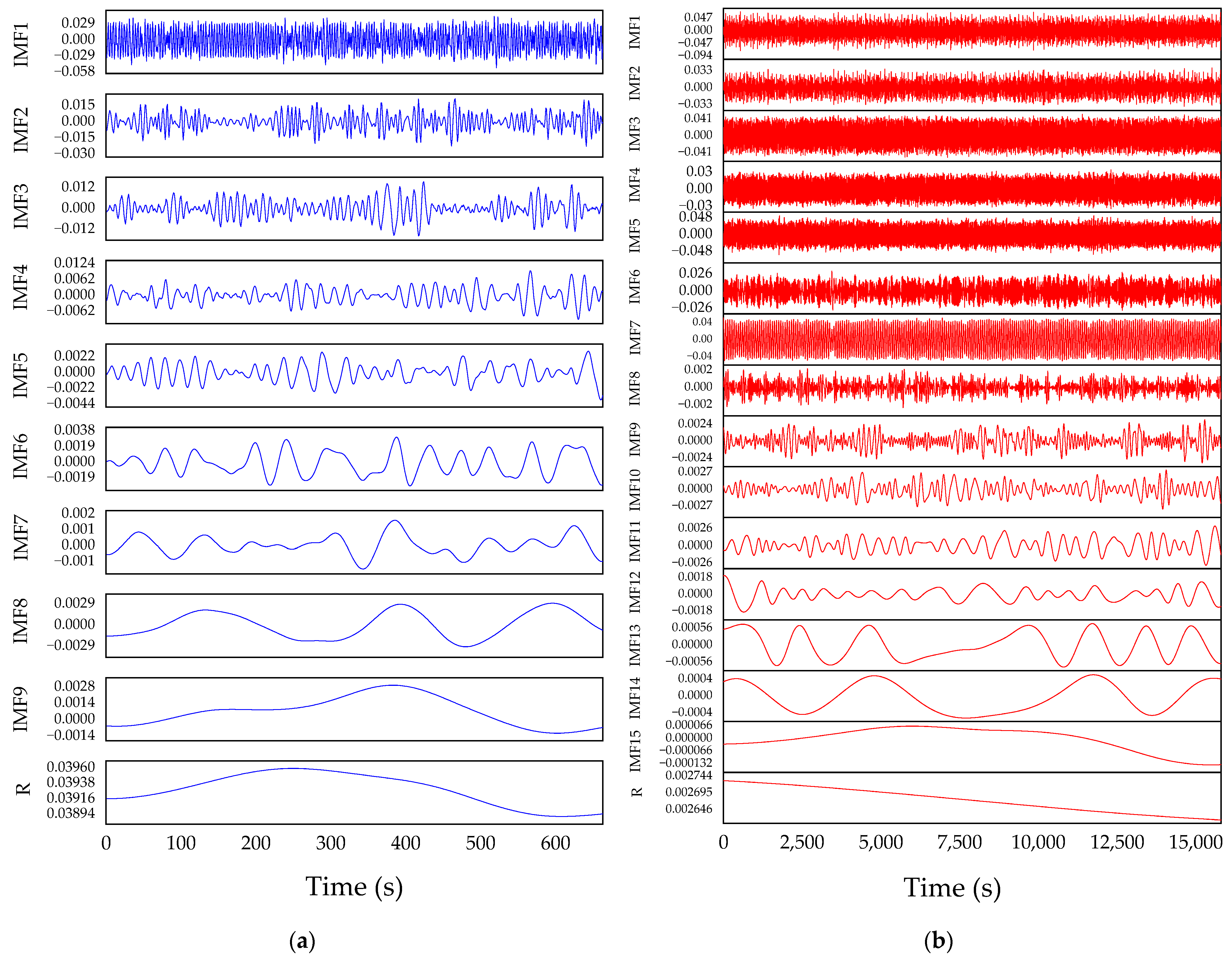
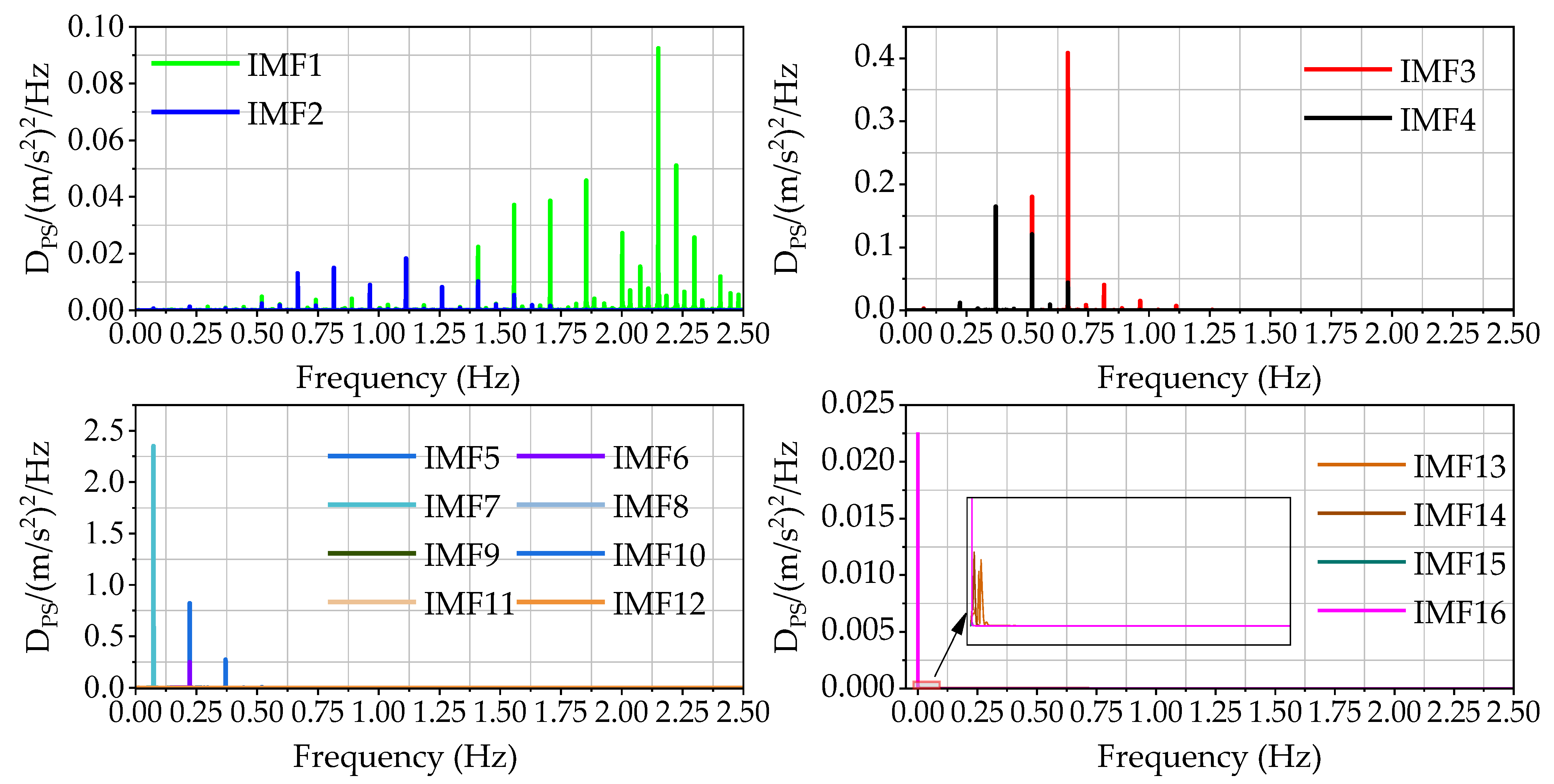
3.2. CEEMDAN Decomposition
3.3. Similarity Clustering
3.3.1. Spectrum Analysis
3.3.2. Reconstruction by Superposition
3.4. Training of LSTM Model and Prediction Results
3.4.1. Experimental Settings
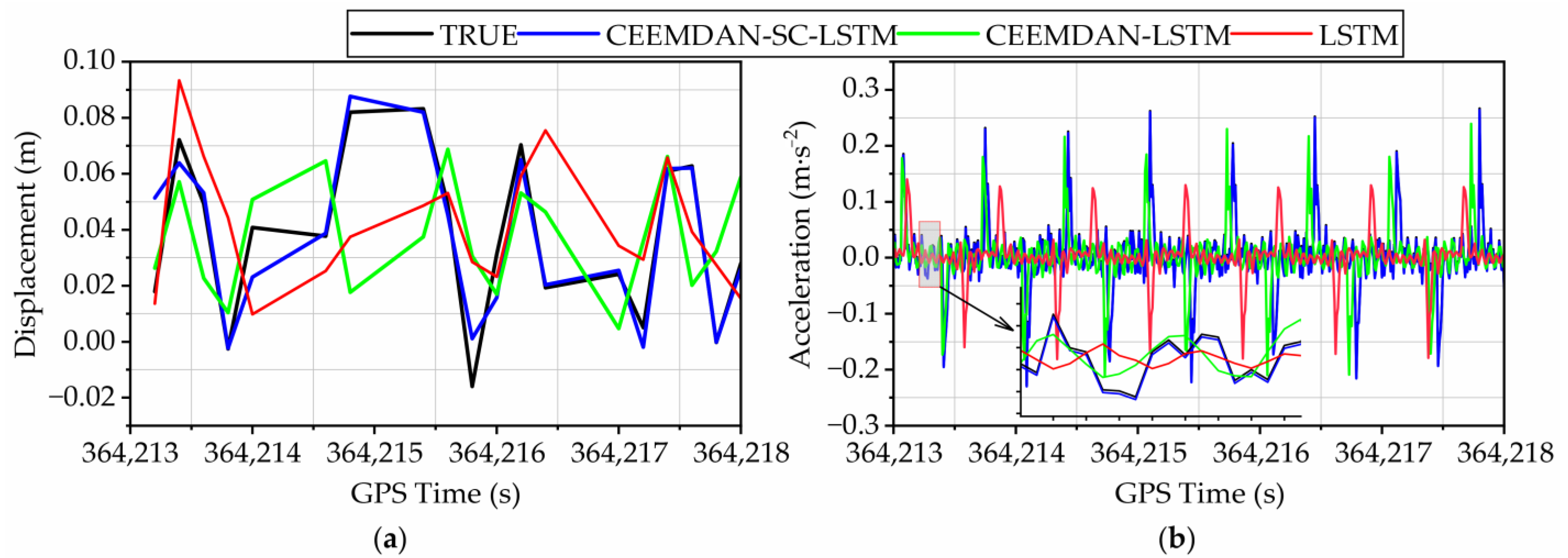
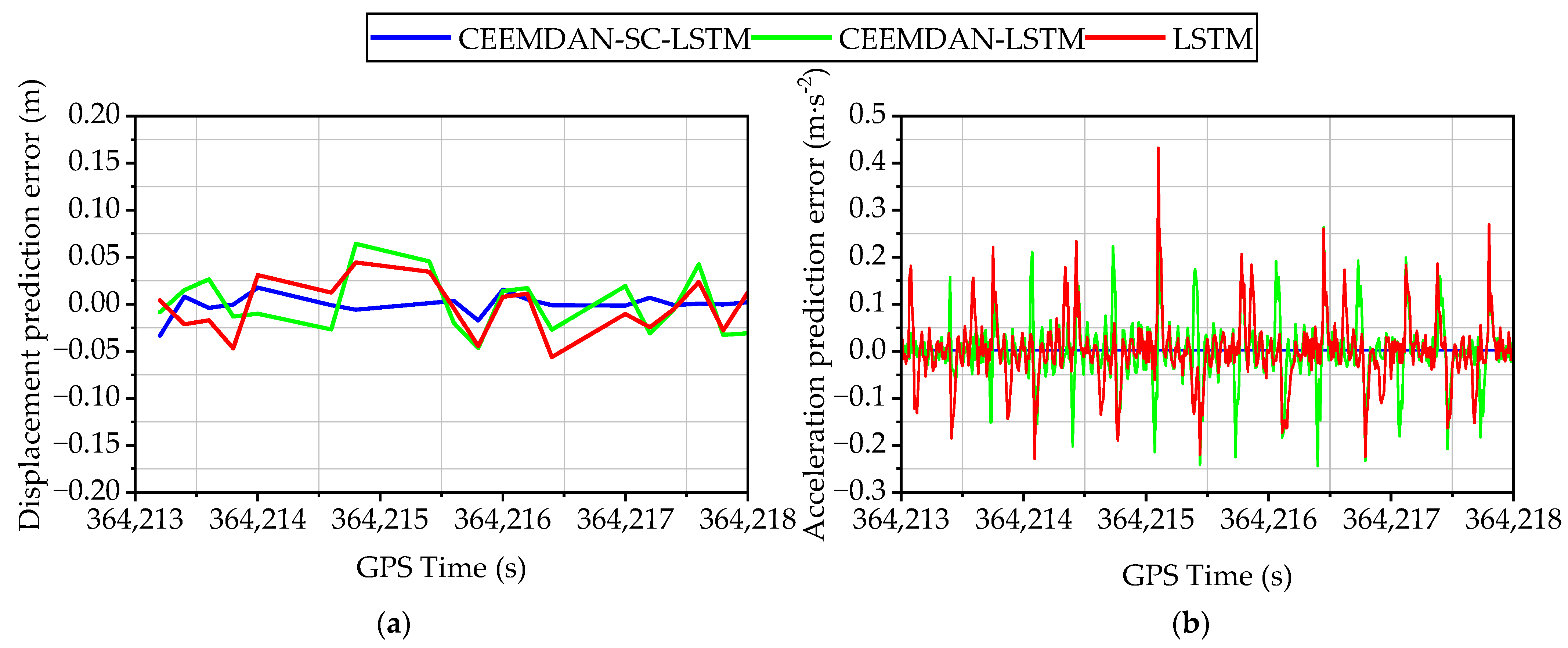
3.4.2. Analysis of Predicted Results
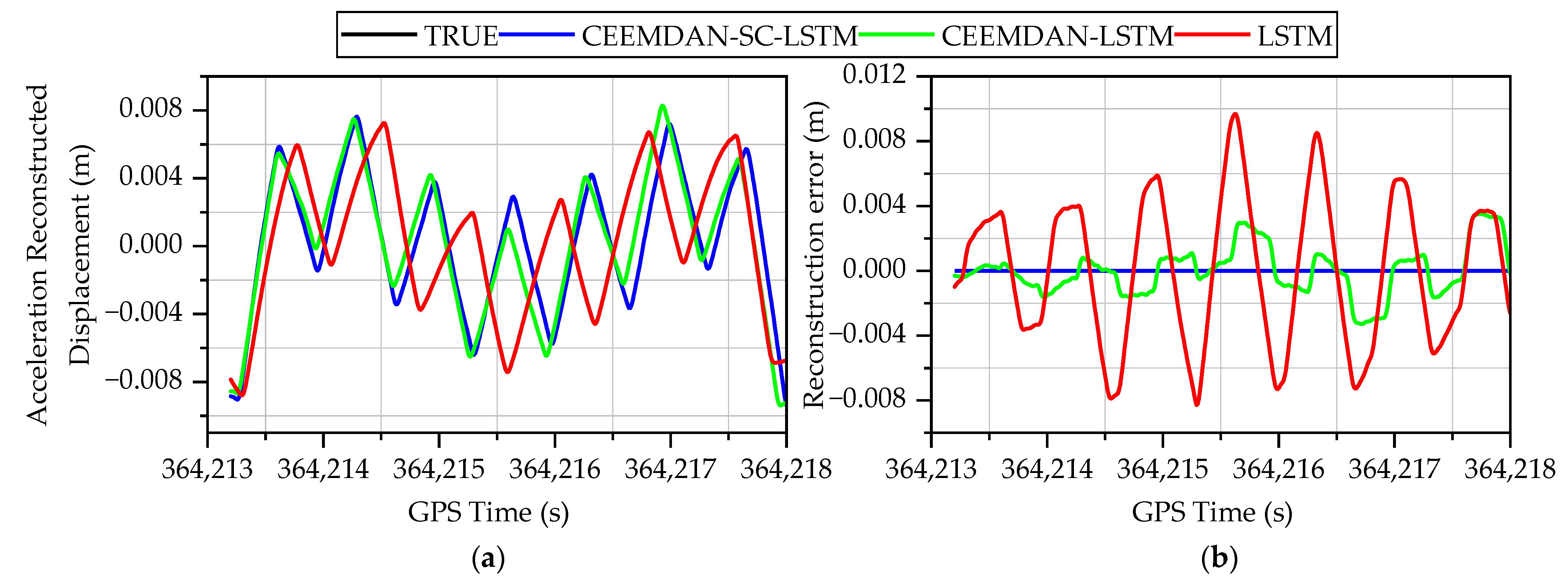
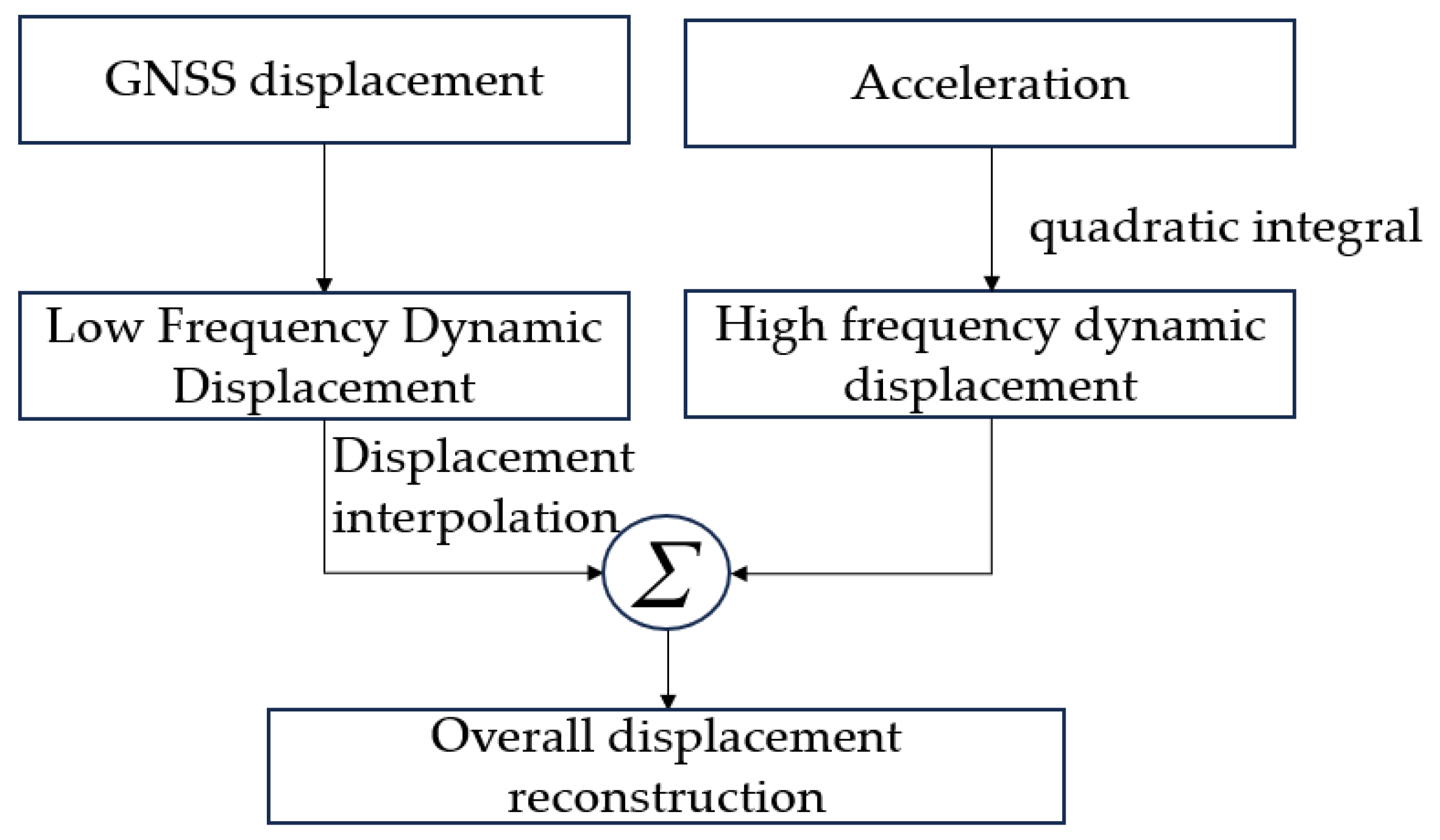
3.5. Reconstruction of Overall Deformation by Prediction Results
Acceleration Reconstructed Displacement
3.6. Overall Deformation Reconstruction
3.6.1. True Deformation Sequence
3.6.2. Reconstruction of Overall Deformation Using Predicted Values
4. Conclusions
- (1)
- The monitoring sequences are decomposed into several simple signal components for each monitoring data by the CEEMDAN algorithm, which effectively reduces the adverse effects of the nonlinear and nonstationary characteristics of the monitoring sequences on the subsequent model training.
- (2)
- A data response reconstruction is proposed by analyzing time-frequency feature similarity and clustering. The clustered monitoring sequences exhibit complex and distinct characteristics, allowing better capture of key features in the structural deformation process. Shaking table experiment results showed that the proposed deformation prediction framework could offer an average prediction error of RMSE = 0.011 m for predicted GNSS displacement and RMSE = 0.002 m/s^2 for predicted acceleration. When compared to the CEEMDAN-LSTM and LSTM prediction models, the proposed model exhibits higher prediction accuracy and reliability.
- (3)
- The overall displacement reconstructed by the method proposed in this paper has a strong correlation with the reference displacement, The experimental results show that the RMSE of the displacement reconstructed from predicted acceleration is less than 1 mm, with a reconstruction similarity of over 99%. Furthermore, the overall displacement reconstruction similarity can reach over 95%. The GNSS/accelerometer integrated displacement reconstruction algorithm accurately identifies structural deformation, thereby enhancing the precision and reliability of deformation monitoring. This algorithm can be applied to health monitoring and early warning systems for large structures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Han, H.; Ma, W.; Xu, Q.; Li, R.; Xu, T. A Welch-Ewt-Svd Time–Frequency Feature Extraction Model for Deformation Monitoring Data. Measurement 2023, 222, 113709. [Google Scholar] [CrossRef]
- Xiong, C.; Niu, Y. Investigation of the Dynamic Behavior of a Super High-Rise Structure Using Rtk-Gnss Technique. KSCE J. Civ. Eng. 2019, 23, 654–665. [Google Scholar] [CrossRef]
- Li, H.; Xu, Q.; He, Y.; Fan, X.; Yang, H.; Li, S. Temporal Detection of Sharp Landslide Deformation with Ensemble-Based Lstm-Rnns and Hurst Exponent. Geomat. Nat. Hazards Risk 2021, 12, 3089–3113. [Google Scholar] [CrossRef]
- Shen, W.; Zhi, J.; Wang, Y.; Sun, J.; Lin, Y.; Li, Y.; Jiang, W. Two-Step Cfar-Based 3d Point Cloud Extraction Method for Circular Scanning Ground-Based Synthetic Aperture Radar. Appl. Sci. 2023, 13, 7164. [Google Scholar] [CrossRef]
- Yi, Z.; Kuang, C.; Wang, Y.; Yu, W.; Cai, C.; Dai, W. Combination of High- and Low-Rate Gps Receivers for Monitoring Wind-Induced Response of Tall Buildings. Sensors 2018, 18, 4100. [Google Scholar] [CrossRef] [PubMed]
- Lorenz, R.; Petryna, Y.; Lubitz, C.; Lang, O.; Wegener, V. Thermal Deformation Monitoring of a Highway Bridge: Combined Analysis of Geodetic and Satellite-Based Insar Measurements with Structural Simulations. J. Civ. Struct. Health Monit. 2024, 14, 1237–1255. [Google Scholar] [CrossRef]
- Ogaja, C.; Wang, J.; Rizos, C. Detection of Wind-Induced Response by Wavelet Transformed Gps Solutions. J. Surv. Eng. 2003, 129, 99–104. [Google Scholar] [CrossRef]
- Jing, C.; Huang, G.; Zhang, Q.; Li, X.; Bai, Z.; Du, Y. Gnss/Accelerometer Adaptive Coupled Landslide Deformation Monitoring Technology. Remote Sens. 2022, 14, 3537. [Google Scholar] [CrossRef]
- Han, H.; Wang, J.; Meng, X. Reconstruction of Bridge Dynamics Usingintegrated Gps and Accelerometer. Zhongguo Kuangye Daxue Xuebao/J. China Univ. Min. Technol. 2015, 44, 549–556. [Google Scholar]
- Yu, J.; Meng, X.; Yan, B.; Xu, B.; Fan, Q.; Xie, Y. Global Navigation Satellite System-Based Positioning Technology for Structural Health Monitoring: A Review. Struct Control Health Monit. 2020, 27, e2467. [Google Scholar] [CrossRef]
- Qi, X.; Hong, C.; Ye, T.; Gu, L.; Wu, W. Frequency Reconstruction Oriented Emd-Lstm-Am Based Surface Temperature Prediction for Lithium-Ion Battery. J. Energy Storage 2024, 84, 111001. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, X.; Ren, F.; Shao, Z.; Tian, C. Wind Speed Prediction Using a Hybrid Model of Eemd and Lstm Considering Seasonal Features. Energy Rep. 2022, 8, 8965–8980. [Google Scholar] [CrossRef]
- Shaikh, M.M.; Butt, R.A.; Khawaja, A. Forecasting Total Electron Content (Tec) Using Ceemdan Lstm Model. Adv. Space Res. 2023, 71, 4361–4373. [Google Scholar] [CrossRef]
- Ren, Q.; Li, M.; Li, H.; Shen, Y. A Novel Deep Learning Prediction Model for Concrete Dam Displacements Using Interpretable Mixed Attention Mechanism. Adv. Eng. Inform. 2021, 50, 101407. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhong, W.; Li, Y.; Wen, L. A Deep Learning Prediction Model of Densenet-Lstm for Concrete Gravity Dam Deformation Based on Feature Selection. Eng. Struct. 2023, 295, 116827. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Z.; Hu, S.; Gu, C.; Guo, J.; Qin, X. A Feature Decomposition-Based Deep Transfer Learning Framework for Concrete Dam Deformation Prediction with Observational Insufficiency. Adv. Eng. Inform. 2023, 58, 102175. [Google Scholar] [CrossRef]
- Pan, J.; Liu, W.; Liu, C.; Wang, J. Convolutional Neural Network-Based Spatiotemporal Prediction for Deformation Behavior of Arch Dams. Expert Syst. Appl. 2023, 232, 120835. [Google Scholar] [CrossRef]
- Xie, Y.; Wang, J.; Li, H.; Dong, A.; Kang, Y.; Zhu, J.; Wang, Y.; Yang, Y. Deep Learning Cnn-Gru Method for Gnss Deformation Monitoring Prediction. Appl. Sci. 2024, 14, 4004. [Google Scholar] [CrossRef]
- Liu, M.; Wen, Z.; Zhou, R.; Su, H. Bayesian Optimization and Ensemble Learning Algorithm Combined Method for Deformation Prediction of Concrete Dam. Structures 2023, 54, 981–993. [Google Scholar] [CrossRef]
- Zhang, S.; Zheng, D.; Liu, Y. Deformation Prediction System of Concrete Dam Based on Ivm-Scso-Rf. Water 2022, 14, 3739. [Google Scholar] [CrossRef]
- Wang, Y.; Zou, R.; Liu, F.; Zhang, L.; Liu, Q. A Review of Wind Speed and Wind Power Forecasting with Deep Neural Networks. Appl. Energy 2021, 304, 117766. [Google Scholar] [CrossRef]
- Liu, Y.; Guan, L.; Hou, C.; Han, H.; Liu, Z.; Sun, Y.; Zheng, M. Wind Power Short-Term Prediction Based on Lstm and Discrete Wavelet Transform. Appl. Sci. 2019, 9, 1108. [Google Scholar] [CrossRef]
- Yang, D.; Gu, C.; Zhu, Y.; Dai, B.; Zhang, K.; Zhang, Z.; Li, B. A Concrete Dam Deformation Prediction Method Based on Lstm with Attention Mechanism. IEEE Access 2020, 8, 185177–185186. [Google Scholar] [CrossRef]
- Zhang, R.; Meng, L.; Mao, Z.; Sun, H. Spatiotemporal Deep Learning for Bridge Response Forecasting. J. Struct. Eng. 2021, 147, 04021070. [Google Scholar] [CrossRef]
- Fang, Z.; He, R.; Yu, H.; He, Z.; Pan, Y. Optimization of Reservoir Level Scheduling Based on Insar-Lstm Deformation Prediction Model for Rockfill Dams. Water 2023, 15, 3384. [Google Scholar] [CrossRef]
- Sapidis, G.M.; Kansizoglou, I.; Naoum, M.C.; Papadopoulos, N.A.; Chalioris, C.E. A Deep Learning Approach for Autonomous Compression Damage Identification in Fiber-Reinforced Concrete Using Piezoelectric Lead Zirconate Titanate Transducers. Sensors 2024, 24, 386. [Google Scholar] [CrossRef] [PubMed]
- Ai, D.; Mo, F.; Cheng, J.; Du, L. Deep Learning of Electromechanical Impedance for Concrete Structural Damage Identification Using 1-D Convolutional Neural Networks. Constr. Build. Mater. 2023, 385, 131423. [Google Scholar] [CrossRef]
- Lu, J.; Wang, Y.; Zhu, Y.; Liu, J.; Xu, Y.; Yang, H.; Wang, Y. Daclnet: A Dual-Attention-Mechanism Cnn-Lstm Network for the Accurate Prediction of Nonlinear Insar Deformation. Remote Sens. 2024, 16, 2474. [Google Scholar] [CrossRef]
- Su, Y.; Weng, K.; Lin, C.; Zheng, Z. An Improved Random Forest Model for the Prediction of Dam Displacement. IEEE Access 2021, 9, 9142–9153. [Google Scholar] [CrossRef]
- Luo, X.; Gan, W.; Wang, L.; Chen, Y.; Ma, E. A Deep Learning Prediction Model for Structural Deformation Based on Temporal Convolutional Networks. Comput. Intell. Neurosci. 2021, 2021, 8829639. [Google Scholar] [CrossRef]
- Ma, J.; Liu, X.; Niu, X.; Wang, Y.; Wen, T.; Zhang, J.; Zou, Z. Forecasting of Landslide Displacement Using a Probability-Scheme Combination Ensemble Prediction Technique. Int. J. Environ. Res. Public Health 2020, 17, 4788. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.; Xiang, Y.; Wang, Y.; Shen, G. A Dam Safety State Prediction and Analysis Method Based on Emd-Ssa-Lstm. Water 2024, 16, 395. [Google Scholar] [CrossRef]
- Meng, Y.; Qin, Y.; Cai, Z.; Tian, B.; Yuan, C.; Zhang, X.; Zuo, Q. Dynamic Forecast Model for Landslide Displacement with Step-Like Deformation by Applying Gru with Emd and Error Correction. Bull. Eng. Geol. Environ. 2023, 82, 211. [Google Scholar] [CrossRef]
- Zhang, C.; Fu, S.; Ou, B.; Liu, Z.; Hu, M. Prediction of Dam Deformation Using Ssa-Lstm Model Based on Empirical Mode Decomposition Method and Wavelet Threshold Noise Reduction. Water 2022, 14, 3380. [Google Scholar] [CrossRef]
- Peng, K.; Jiang, L.-z.; Zhou, W.-b.; Yu, J.; Xiang, P.; Wu, L.-x. A Seismic Response Prediction Method Based on a Self-Optimized Bayesian Bi-Lstm Mixed Network for High-Speed Railway Track-Bridge System. J. Cent. South Univ. 2024, 31, 965–975. [Google Scholar] [CrossRef]
- He, Y.; Wang, Y. Short-Term Wind Power Prediction Based on Eemd–Lasso–Qrnn Model. Appl. Soft Comput. 2021, 105, 107288. [Google Scholar] [CrossRef]
- Hu, W.; He, Y.; Liu, Z.; Tan, J.; Yang, M.; Chen, J. Toward a Digital Twin: Time Series Prediction Based on a Hybrid Ensemble Empirical Mode Decomposition and Bo-Lstm Neural Networks. J. Mech. Des. 2020, 143, 051705. [Google Scholar] [CrossRef]
- Zhu, Y.; Gao, Y.; Wang, Z.; Cao, G.; Wang, R.; Lu, S.; Li, W.; Nie, W.; Zhang, Z. A Tailings Dam Long-Term Deformation Prediction Method Based on Empirical Mode Decomposition and Lstm Model Combined with Attention Mechanism. Water 2022, 14, 1229. [Google Scholar] [CrossRef]
- Niu, X.; Ma, J.; Wang, Y.; Zhang, J.; Chen, H.; Tang, H. A Novel Decomposition-Ensemble Learning Model Based on Ensemble Empirical Mode Decomposition and Recurrent Neural Network for Landslide Displacement Prediction. Appl. Sci. 2021, 11, 4684. [Google Scholar] [CrossRef]
- Xu, G.; Lu, Y.; Jing, Z.; Wu, C.; Zhang, Q. Ieall: Dam Deformation Prediction Model Based on Combination Model Method. Appl. Sci. 2023, 13, 5160. [Google Scholar] [CrossRef]
- Wang, Q.; Xie, X.; Shahrour, I.; Huang, Y. Use of Deep Learning, Denoising Technic and Cross-Correlation Analysis for the Prediction of the Shield Machine Slurry Pressure in Mixed Ground Conditions. Autom. Constr. 2021, 128, 103741. [Google Scholar] [CrossRef]
- Shan, J.; Zhang, X.; Liu, Y.; Zhang, C.; Zhou, J. Deformation Prediction of Large-Scale Civil Structures Using Spatiotemporal Clustering and Empirical Mode Decomposition-Based Long Short-Term Memory Network. Autom. Constr. 2024, 158, 105222. [Google Scholar] [CrossRef]
- Zhao, X.; Lu, X.; Quan, W.; Li, X.; Zhao, H.; Lin, G. An Effective Ionospheric Tec Predicting Approach Using Eemd-Pe-Kmeans and Self-Attention Lstm. Neural Process. Lett. 2023, 55, 9225–9245. [Google Scholar] [CrossRef]
- Guo, T.; Xu, Z.; Yao, X.; Chen, H.; Aberer, K.; Funaya, K. Robust Online Time Series Prediction with Recurrent Neural Networks. In Proceedings of the 2016 IEEE International Conference on Data Science and Advanced Analytics (DSAA), Montreal, QC, Canada, 17–19 October 2016; pp. 816–825. [Google Scholar]
- Wang, X.; Liu, W.; Wang, Y.; Yang, G. A Hybrid Nox Emission Prediction Model Based on Ceemdan and Am-Lstm. Fuel 2022, 310, 122486. [Google Scholar] [CrossRef]
- Sherstinsky, A. Fundamentals of Recurrent Neural Network (Rnn) and Long Short-Term Memory (Lstm) Network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Hu, J.; Wang, J.; Ma, K. A Hybrid Technique for Short-Term Wind Speed Prediction. Energy 2015, 81, 563–574. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | RMSE | MAE | MAPE% | |||
|---|---|---|---|---|---|---|
| Displacement/m | Acceleration/m/s2 | Displacement/m | Acceleration/m/s2 | Displacement | Acceleration | |
| CEEMDAN-SC-LSTM | 0.011 | 0.002 | 0.007 | 0.002 | 0.346 | 0.516 |
| CEEMDAN-LSTM | 0.030 | 0.068 | 0.026 | 0.046 | 7.220 | 4.577 |
| LSTM | 0.028 | 0.070 | 0.023 | 0.045 | 6.879 | 5.550 |
| Method | Model | R | RMSE/m | |
|---|---|---|---|---|
| Acceleration Reconstructed Displacement | CEEMDAN-SC-LSTM | 0.007 | 0.999 | 0.003 |
| CEEMDAN-LSTM | 0.011 | 0.939 | 0.015 | |
| LSTM | 0.037 | 0.454 | 0.044 |
| Method | Model | R | RMSE/m | |
|---|---|---|---|---|
| Overall Displacement Reconstruction | CEEMDAN-SC-LSTM | 0.004 | 0.958 | 0.005 |
| CEEMDAN-LSTM | 0.018 | 0.281 | 0.020 | |
| LSTM | 0.016 | 0.272 | 0.019 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, H.; Li, R.; Xu, T.; Du, M.; Ma, W.; Wu, H. A Similarity Clustering Deformation Prediction Model Based on GNSS/Accelerometer Time-Frequency Analysis. Appl. Sci. 2024, 14, 6889. https://doi.org/10.3390/app14166889
Han H, Li R, Xu T, Du M, Ma W, Wu H. A Similarity Clustering Deformation Prediction Model Based on GNSS/Accelerometer Time-Frequency Analysis. Applied Sciences. 2024; 14(16):6889. https://doi.org/10.3390/app14166889
Chicago/Turabian StyleHan, Houzeng, Rongheng Li, Tao Xu, Meng Du, Wenxuan Ma, and He Wu. 2024. "A Similarity Clustering Deformation Prediction Model Based on GNSS/Accelerometer Time-Frequency Analysis" Applied Sciences 14, no. 16: 6889. https://doi.org/10.3390/app14166889
APA StyleHan, H., Li, R., Xu, T., Du, M., Ma, W., & Wu, H. (2024). A Similarity Clustering Deformation Prediction Model Based on GNSS/Accelerometer Time-Frequency Analysis. Applied Sciences, 14(16), 6889. https://doi.org/10.3390/app14166889