
Structural Design and Static Stiffness Optimization of Magnetorheological Suspension for Automotive Engine


Abstract
1. Introduction
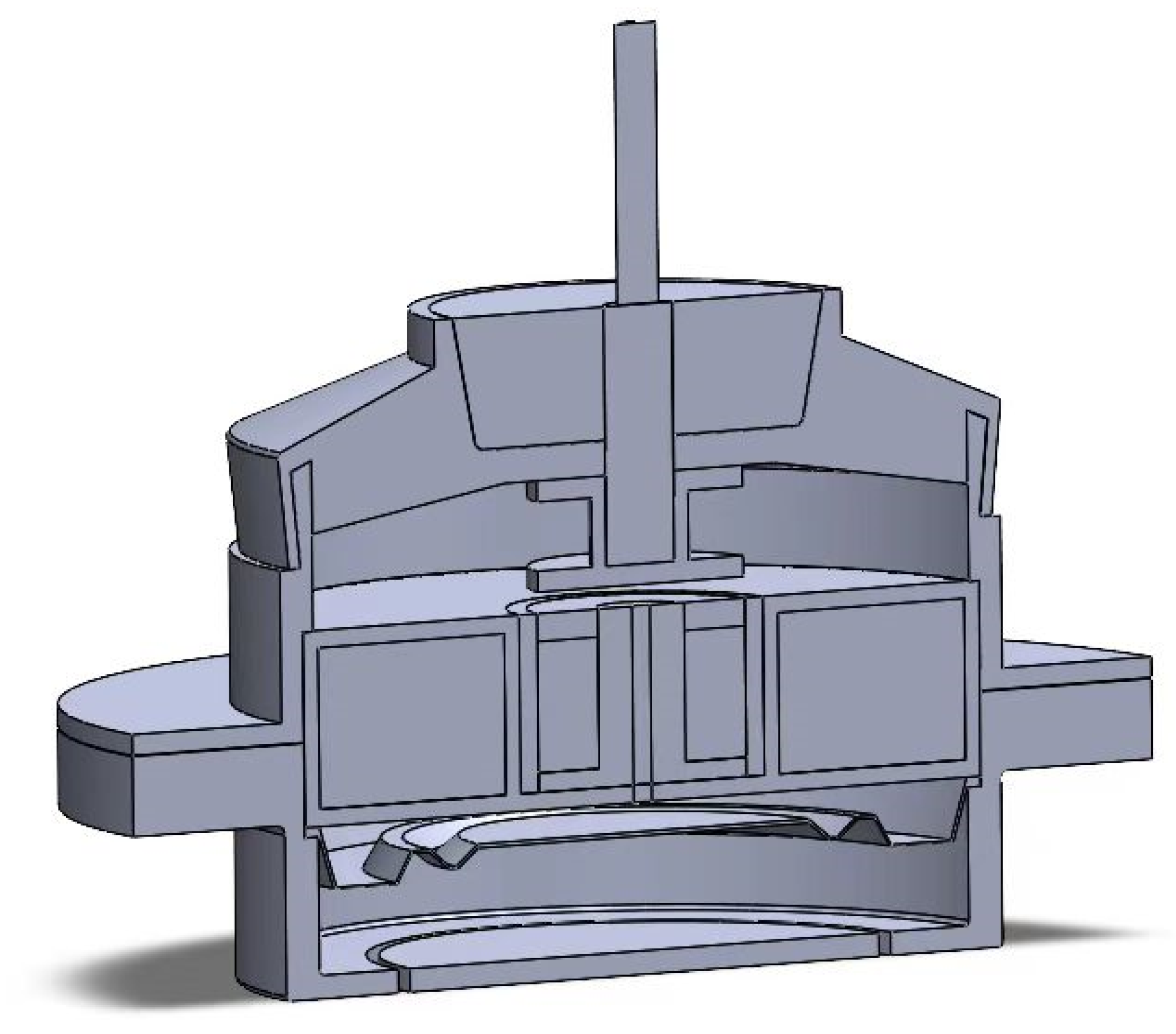
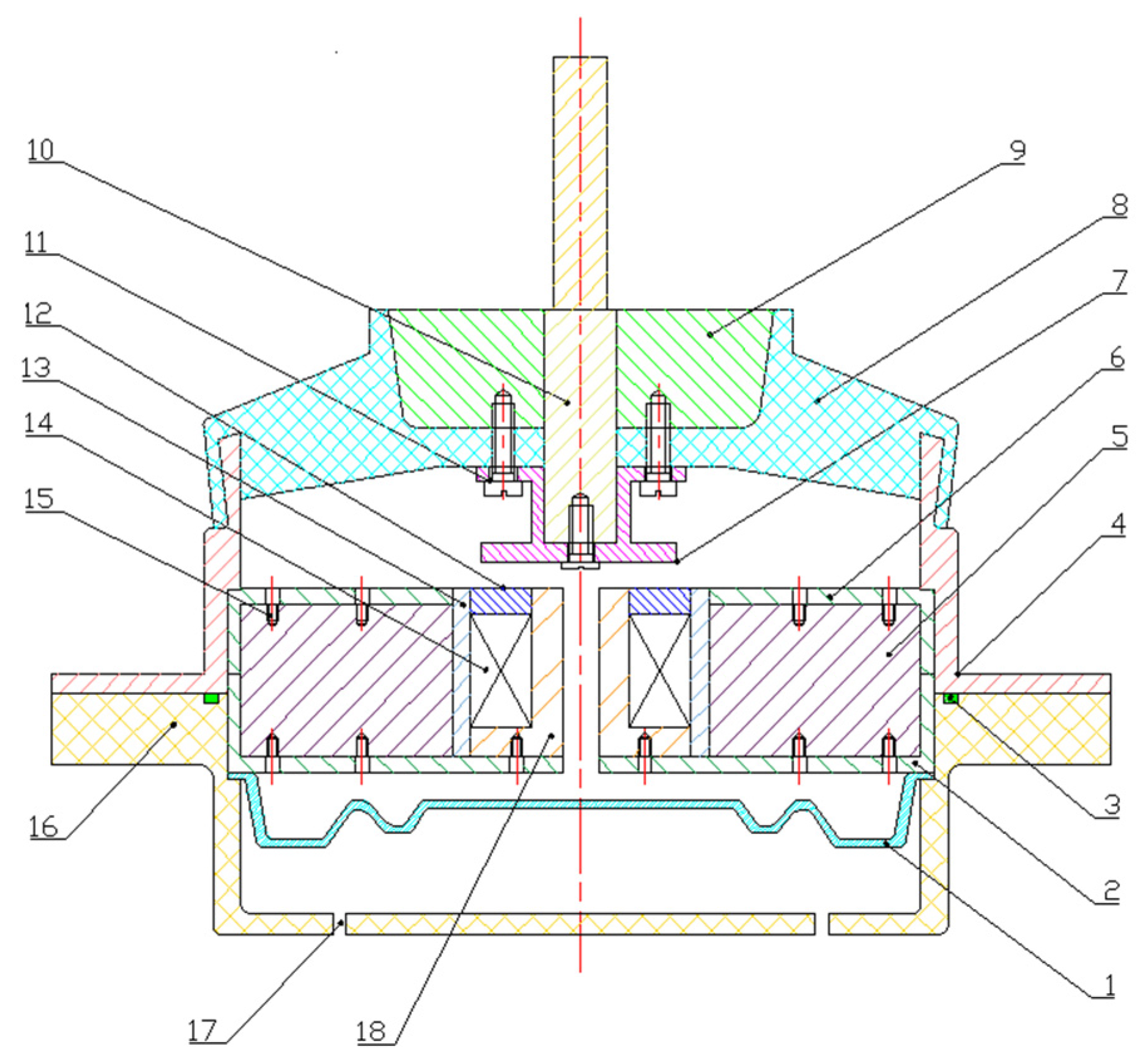
2. Magnetorheological Suspension Structure Design
2.1. Magnetorheological Fluid Design
- —zero field viscosity;
- —shear strain rate.
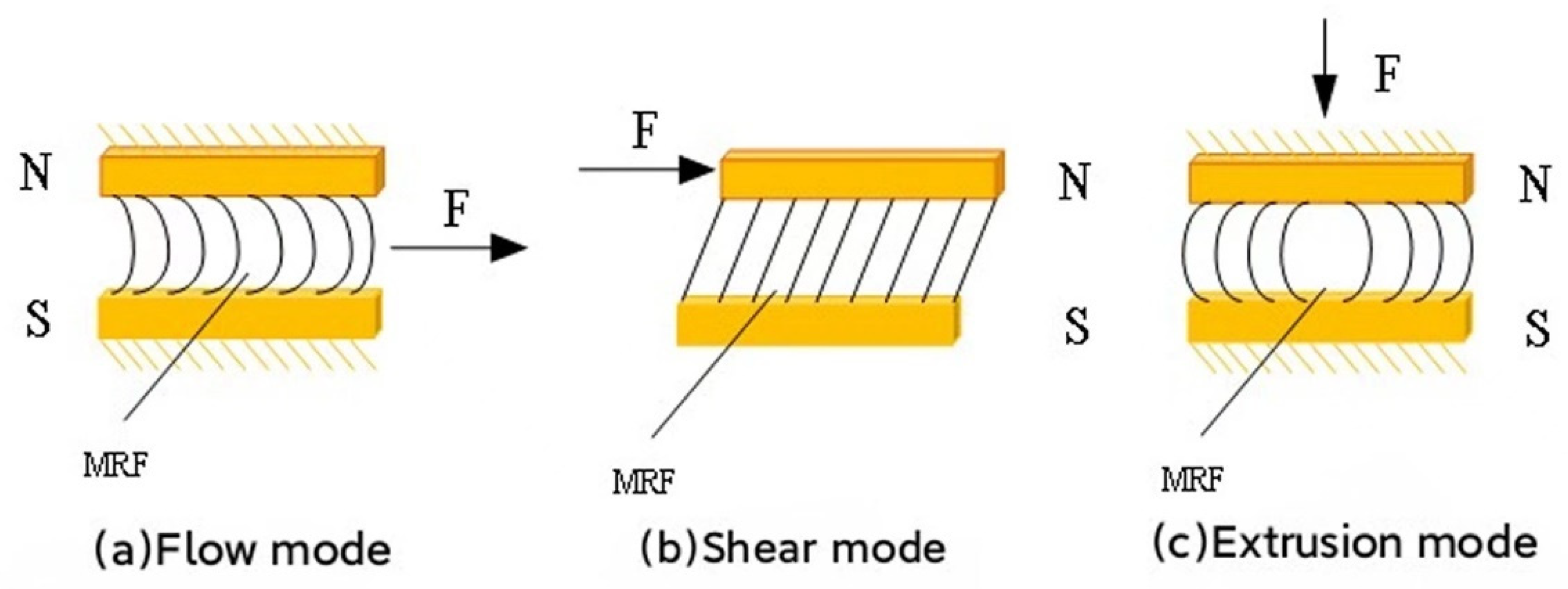
2.2. Working Principle of Magnetorheological Suspension
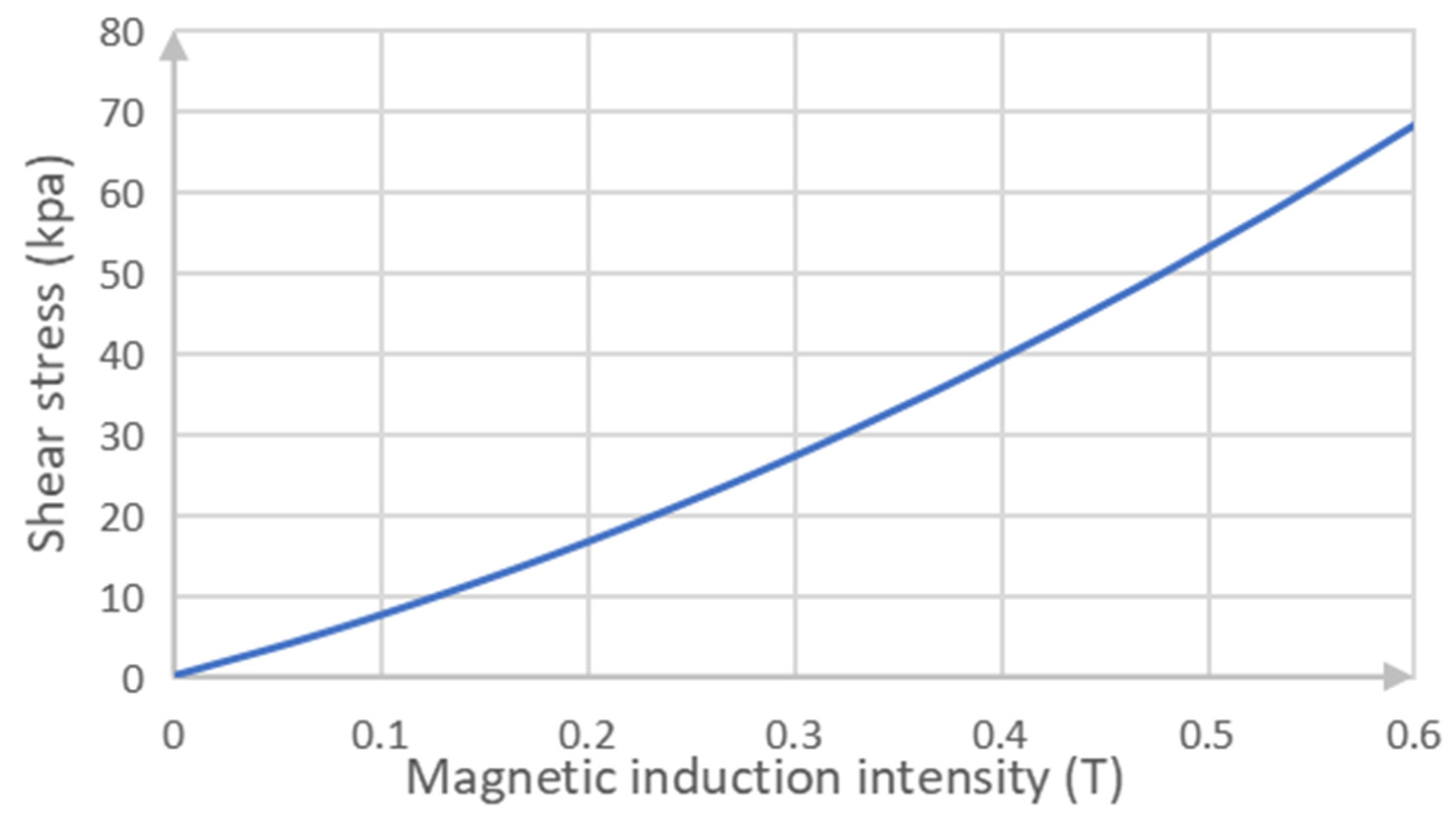
2.3. Suspension Magnetic Circuit Design
2.4. Rubber Master Spring Design
3. Optimization of Static Stiffness Characteristics of Magnetorheological Suspension
3.1. Static Stiffness
- —the increased flow rate of the liquid chamber during the operation of magnetorheological suspension;
- —the reduced flow rate in the upper fluid chamber during the operation of magnetorheological Suspension;
- —modulus of elasticity;
- —the volume of the lower liquid chamber;
- —bottom area of the upper extrusion plate;
- —bottom area of connecting rod;
- —Diameter of the upper extrusion plate;
- — actual engineering constant.
- —the fixed bottom area of the lower liquid chamber;
- —height of upper liquid chamber;
- —lower liquid chamber height;
3.2. Static Stiffness Optimization Results
3.3. Comparative Analysis of Results before and after Optimization
4. Magnetorheological Suspension Test Research and Result Analysis
4.1. Static Performance Test Method
- —static load change;
- —change in static deformation;
- —1.1 times the rated load value;
- —0.9 times the rated load value;
- —at 1.1 times the rated load, Magnetorheological Suspension in the direction of static deformation value;
- —at 0.9 times rated load, Magnetorheological Suspension at the static deformation value added in the direction; .
4.2. Magnetorheological Suspension Sample and Test Equipment
4.3. Test Results and Analysis of Magnetorheological Suspension
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, M. Basic Analysis of vehicle NVH and Engine Influence Factors. Intern. Combust. Engine Accessories 2022, 366, 103–105. [Google Scholar]
- Zhang, J.; Chen, R.; Yao, K. Analysis of the influence of Road Surface Roughness on Vehicle vibration. Highw. Transp. Sci. Technol. 2019, 36, 129–133. (In Chinese) [Google Scholar]
- Sun, L.; Su, L.; Li, Z.; Jiao, X. Research on design and characteristic of a new type of air suspension system with magnetic negative quasi-zero stiffness. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2024, 238, 374–384. [Google Scholar] [CrossRef]
- Xu, C.; Xie, F.; Zhou, R.; Huang, X.; Cheng, W.; Tian, Z.; Li, Z. Vibration analysis and control of semi-active suspension system based on continuous damping control shock absorber. J. Braz. Soc. Mech. Sci. Eng. 2023, 45, 341. [Google Scholar] [CrossRef]
- Zhang, B.; Wang, H.; Li, Z.; Zhang, T. Stiffness design and mechanical performance analysis of transverse leaf spring suspension. J. Mech. Sci. Technol. 2023, 37, 1339–1348. [Google Scholar] [CrossRef]
- Jiang, J.; Nguyen, V.; Xu, S.; Xu, S. Isolating Efficiency of Soil Compactor’s Seat Suspension Using Optimal Negative Stiffness Structure under Various Deformable Terrains. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 209–221. [Google Scholar] [CrossRef]
- Lin, Z.; Wu, M. Simulation Analysis of vibration isolation performance of Magnetorheological Fluid controlled multi-channel suspension. J. Huaqiao Univ. 2022, 43, 21–28. [Google Scholar]
- Luhang, L.; Lin, X.; Hao, C.; Mohamed, A.A.A.; Zihao, L.; Jingyu, C. Validation and Optimization of Suspension Design for Testing Platform Vehicle. Shock Vib. 2021, 2021, 7963517. [Google Scholar]
- Pan, G.; Xiao, Y.; Cheng, R. Research on Optimization Vibration Characteristics of Magnetorheological Fluid Suspension for Automotive Engine. Comput. Simul. 2017, 34, 129–134+378. [Google Scholar]
- Shen, Y.; Fang, C.; Wang, N.; Yang, Y.; Liu, X. Design and Decoupling optimization of Magnetorheological Engine Mounting System. J. Mech. Strength 2021, 43, 693–699. [Google Scholar]
- Cai, Q.; Kui, H.; Deng, Z. Characteristics Analysis of squeezed Shear Hybrid Mode Magnetorheological Suspension. Automot. Eng. 2020, 11, 37–41. [Google Scholar]
- Pan, Y. Research on Dynamic Characteristics and Control Method of Automotive Engine Mount. Master’s Thesis, Jiangsu University, Zhenjiang, China, 2014. [Google Scholar]
- Cai, Q.; Kui, H.; Deng, Z. Design and optimization of Magnetorheological suspension magnetic circuit in conical channel flow mode. J. Chongqing Univ. Technol. 2021, 35, 16–22+84. [Google Scholar]
- Yu, L. Research on Semi-active Magnetorheological Suspension Structure Design and vibration Isolation Performance. Master’s Thesis, Jilin University, Changchun, China, 2007. [Google Scholar]
- Cai, Q. Research on Hybrid Mode Magnetorheological Suspension Structure Optimization Method based on Vehicle Model; Chongqing Jiaotong University: Chongqing, China, 2021. [Google Scholar]
- Wei, F. Research on Design and Semi-Active Control of Automotive Powertrain Magnetorheological Suspension. Master’s Thesis, Nanjing University of Aeronautics and Astronautics, Nanjing, China, 2007. [Google Scholar]
- Han, Z. Research on Design and Integrated Control of Automotive Magnetorheological Semi-Active Suspension System. Master’s Thesis, Jilin University, Changchun, China, 2019. [Google Scholar]
- Gurubasavaraju, T.M.; Kumar, H.; Arun, M. Evaluation of optimal parameters of MAGNETORHEOLOGICAL fluids for damper application using particle swarm and response surface optimisation. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 3683–3694. [Google Scholar] [CrossRef]
- Wu, B. Research on Powertrain mounting System and Optimization Based on Vibration Isolation Theory. Master’s Thesis, Hubei University of Technology, Wuhan, China, 2017. [Google Scholar]
- Wang, Y. Research on Dynamic Characteristics and Control Strategy of Engine Magnetorheological Suspension. Master’s Thesis, Chongqing University of Technology, Chongqing, China, 2022. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Dimension | r1 | r2 | r3 | L1 | L2 | L3 | h0 | f |
|---|---|---|---|---|---|---|---|---|
| Numerical value (mm) | 11 | 18 | 20 | 3 | 26 | 4 | 3 | 2 |
| Group Number | Upper Extrusion Plate Diameter (mm) | The Height of the Upper Fluid Chamber (mm) | The Height of the Lower Fluid Chamber (mm) | Stiffness Value Magnitude (N/mm) |
|---|---|---|---|---|
| 1 | 40 | 31 | 33 | 204.70 |
| 2 | 40 | 31 | 34 | 201.78 |
| 3 | 40 | 31 | 35 | 199.04 |
| 4 | 40 | 32 | 33 | 201.40 |
| 5 | 40 | 32 | 34 | 197.47 |
| 6 | 40 | 32 | 35 | 195.74 |
| 7 | 40 | 33 | 33 | 197.30 |
| 8 | 40 | 33 | 34 | 195.39 |
| 9 | 40 | 33 | 35 | 192.63 |
| 10 | 42 | 31 | 33 | 227.92 |
| 11 | 42 | 31 | 34 | 224.67 |
| 12 | 42 | 31 | 35 | 221.61 |
| 13 | 42 | 32 | 33 | 224.24 |
| 14 | 42 | 32 | 34 | 221.01 |
| 15 | 42 | 32 | 35 | 217.93 |
| 16 | 42 | 33 | 33 | 220.79 |
| 17 | 42 | 33 | 34 | 217.55 |
| 18 | 42 | 33 | 35 | 214.48 |
| 19 | 44 | 31 | 33 | 255.18 |
| 20 | 44 | 31 | 34 | 249.59 |
| 21 | 44 | 31 | 35 | 245.20 |
| 22 | 44 | 32 | 33 | 249.12 |
| 23 | 44 | 32 | 34 | 244.53 |
| 24 | 44 | 32 | 35 | 241.14 |
| 25 | 44 | 33 | 33 | 244.30 |
| 26 | 44 | 33 | 34 | 240.71 |
| 27 | 44 | 33 | 35 | 237.32 |
| Argument | (mm) | (mm) | (mm) | (N/mm) |
|---|---|---|---|---|
| Simulation value before optimization | 40 | 32 | 34 | 197.47 |
| Optimized simulation value | 44 | 31 | 33 | 255.18 |
| Load (N) | ||
| Displacement (mm) | 2.41 | 2.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rao, Z.; Tang, L.; Shi, Y. Structural Design and Static Stiffness Optimization of Magnetorheological Suspension for Automotive Engine. Appl. Sci. 2024, 14, 6975. https://doi.org/10.3390/app14166975
Rao Z, Tang L, Shi Y. Structural Design and Static Stiffness Optimization of Magnetorheological Suspension for Automotive Engine. Applied Sciences. 2024; 14(16):6975. https://doi.org/10.3390/app14166975
Chicago/Turabian StyleRao, Zhi, Lingfeng Tang, and Yifang Shi. 2024. "Structural Design and Static Stiffness Optimization of Magnetorheological Suspension for Automotive Engine" Applied Sciences 14, no. 16: 6975. https://doi.org/10.3390/app14166975
APA StyleRao, Z., Tang, L., & Shi, Y. (2024). Structural Design and Static Stiffness Optimization of Magnetorheological Suspension for Automotive Engine. Applied Sciences, 14(16), 6975. https://doi.org/10.3390/app14166975