
Identifying Elastic Wave Velocity Distribution with Observation Arrival Time Errors Using Weighted Potential Time in Acoustic Emission Tomography


Abstract
1. Introduction
2. Acoustic Emission Tomography
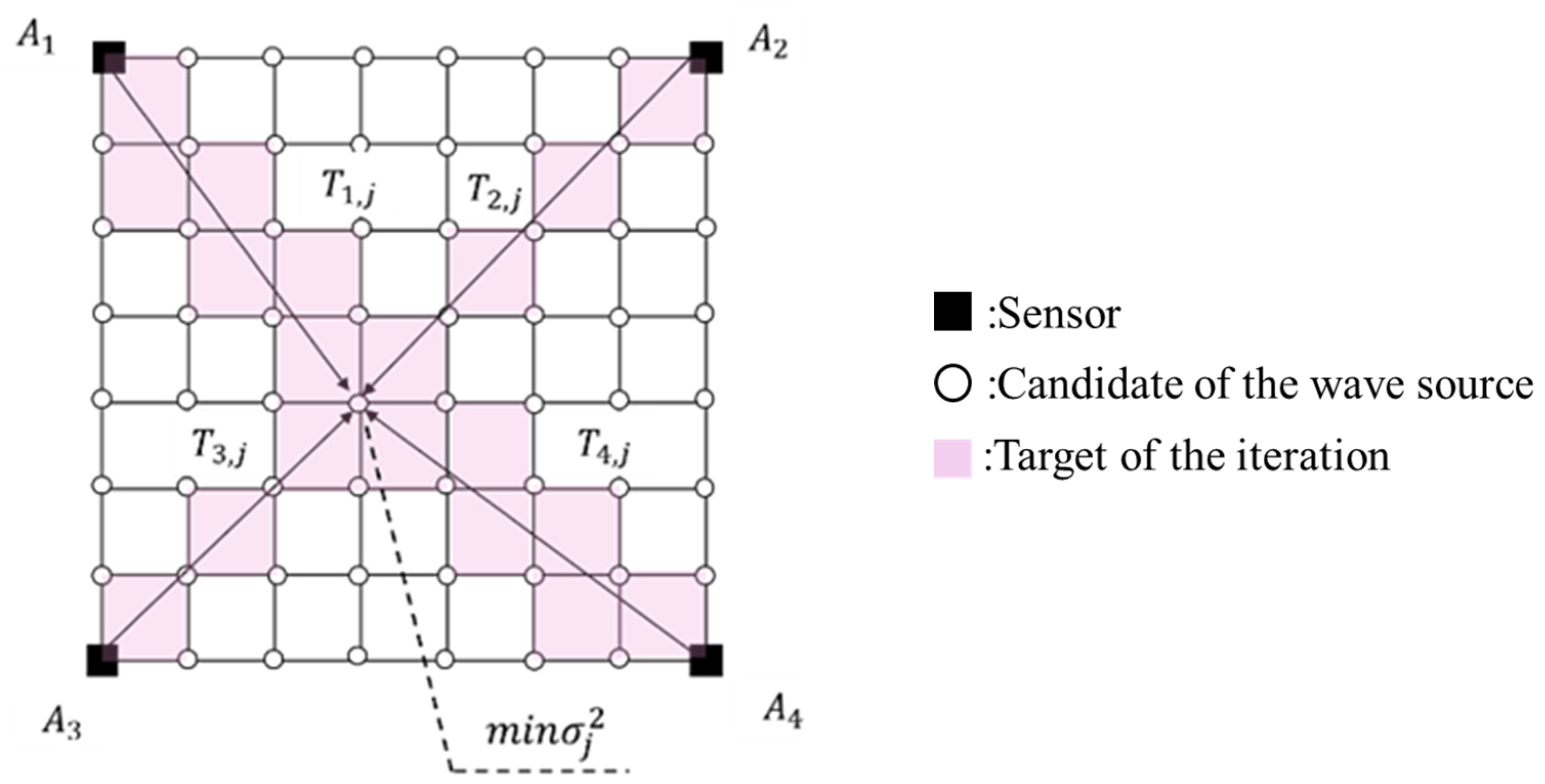
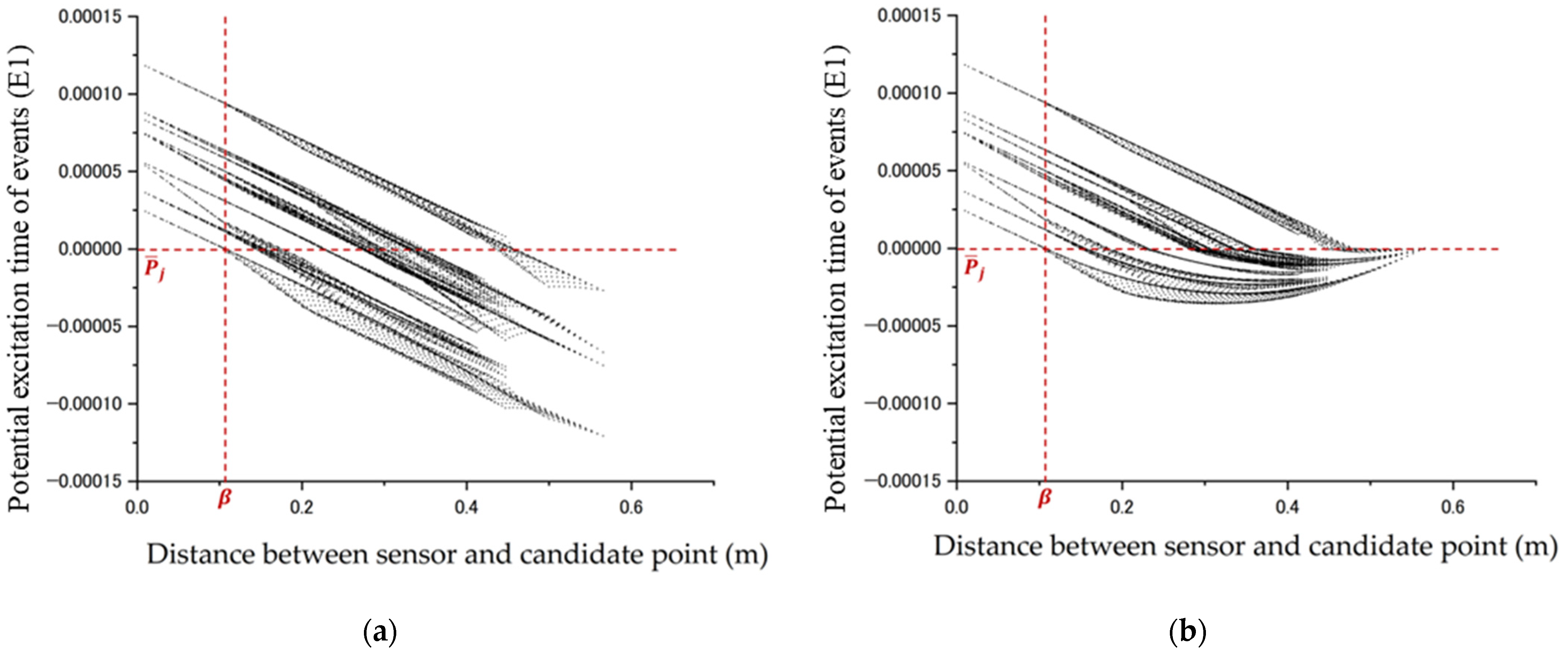
3. Acoustic Emission Tomography with Potential Excitation Time Weight
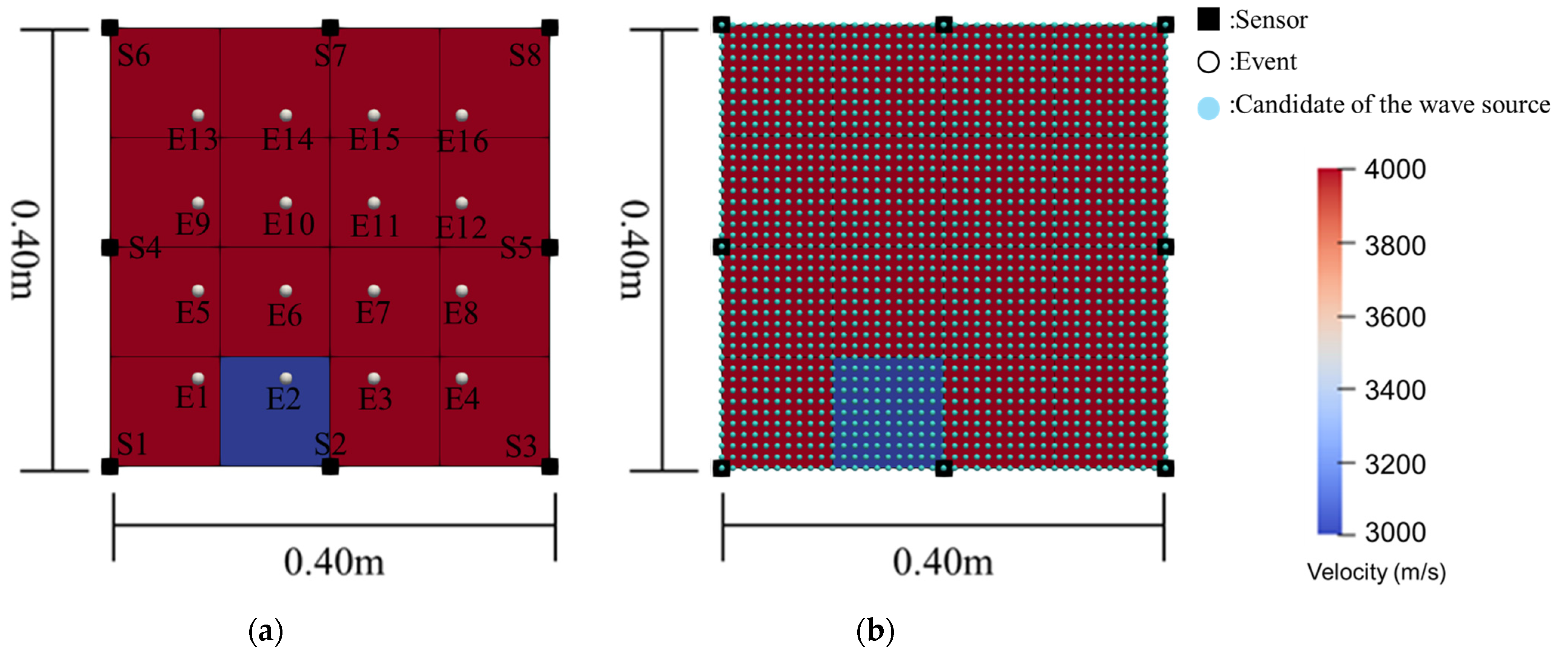
4. Computational Conditions and Generating Arrival Time Observation Errors
5. Results
6. Discussion
7. Conclusions
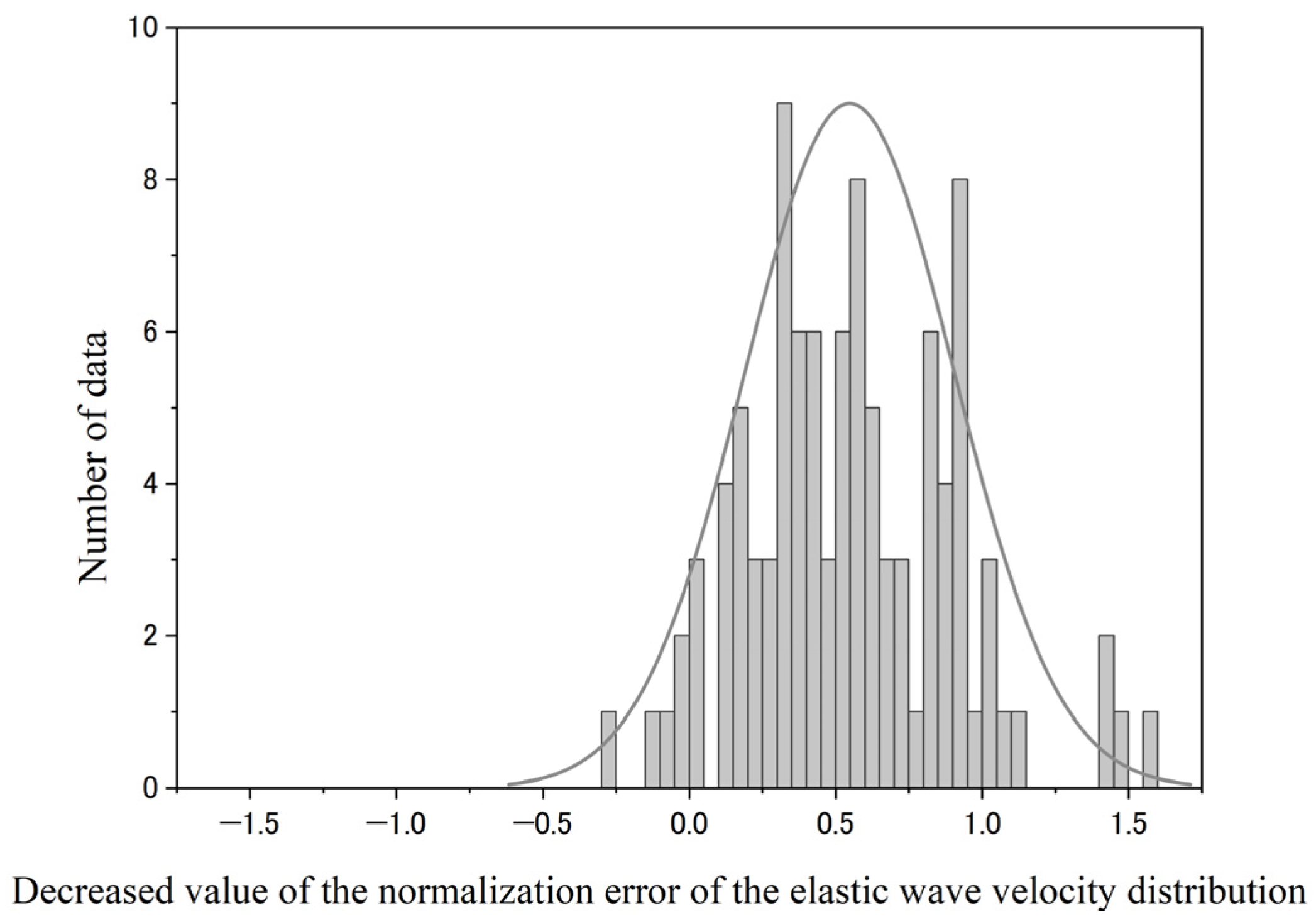
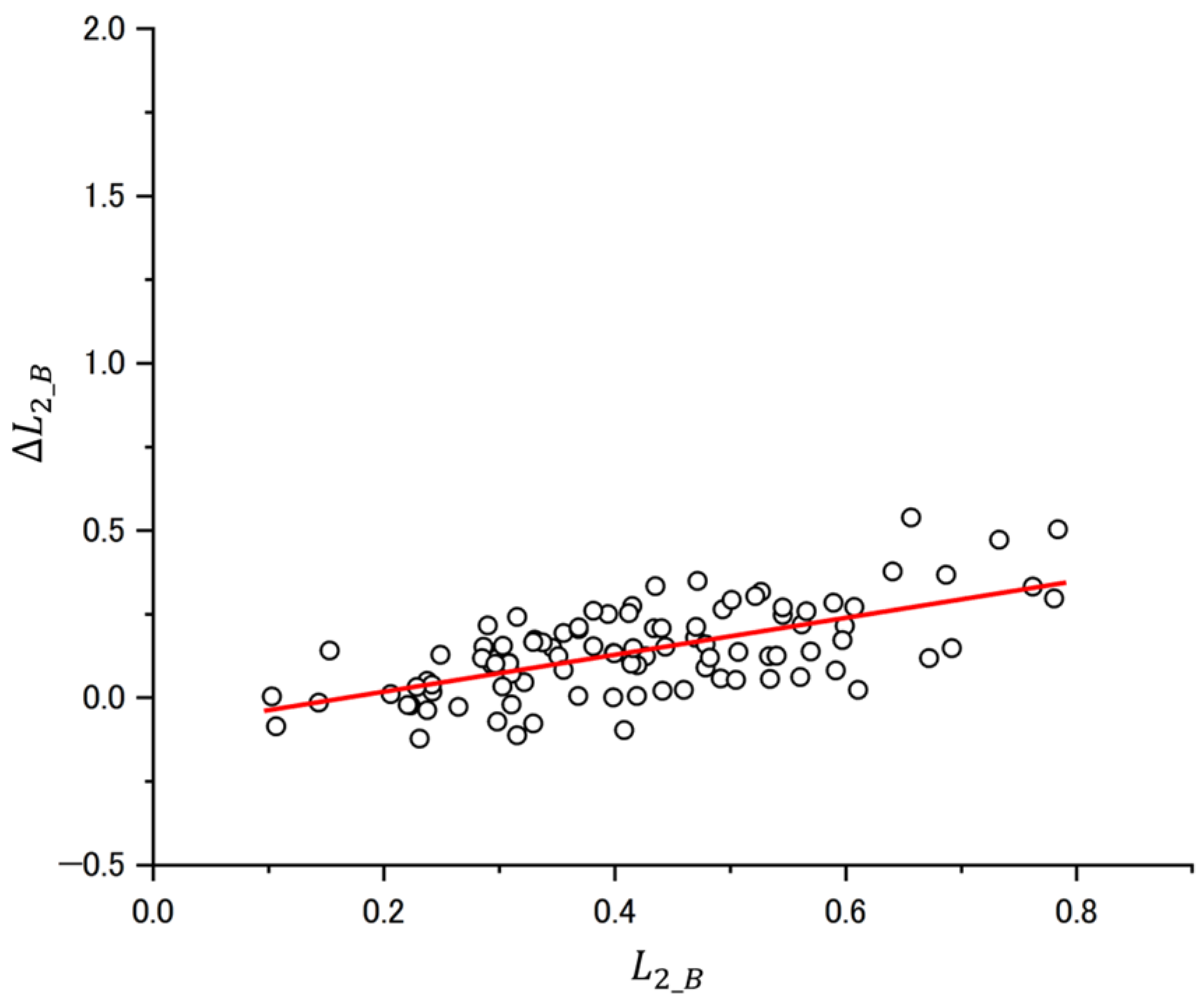
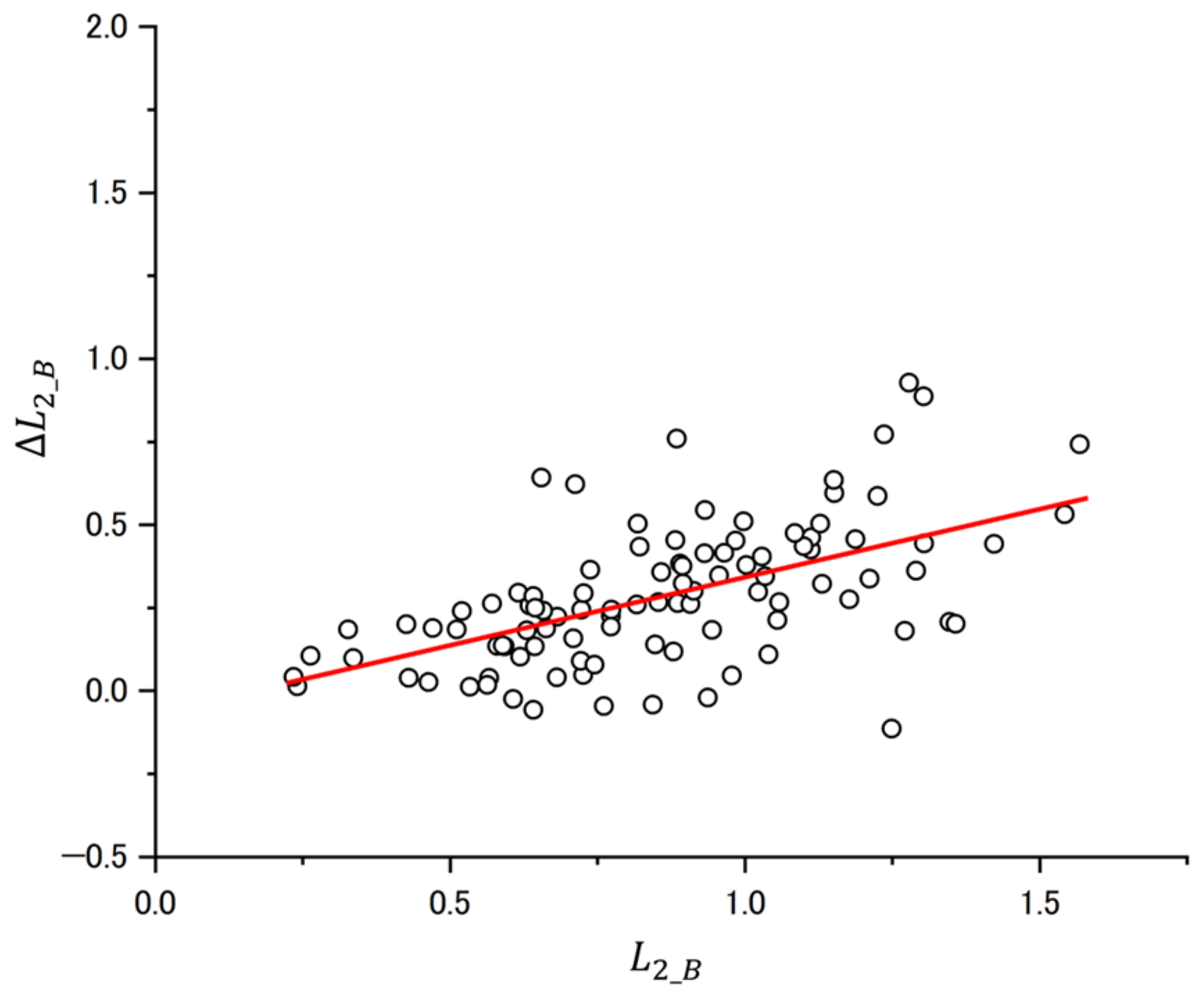
- Reduced normalization errors of the identified elastic wave velocity distribution are observed in most cases by weighting the potential excitation times, including the observation error in arrival times, without reducing the number of observation equations in the proposed method.
- The normalization error of the elastic wave velocity largely decreases as the observation error ratio increases.
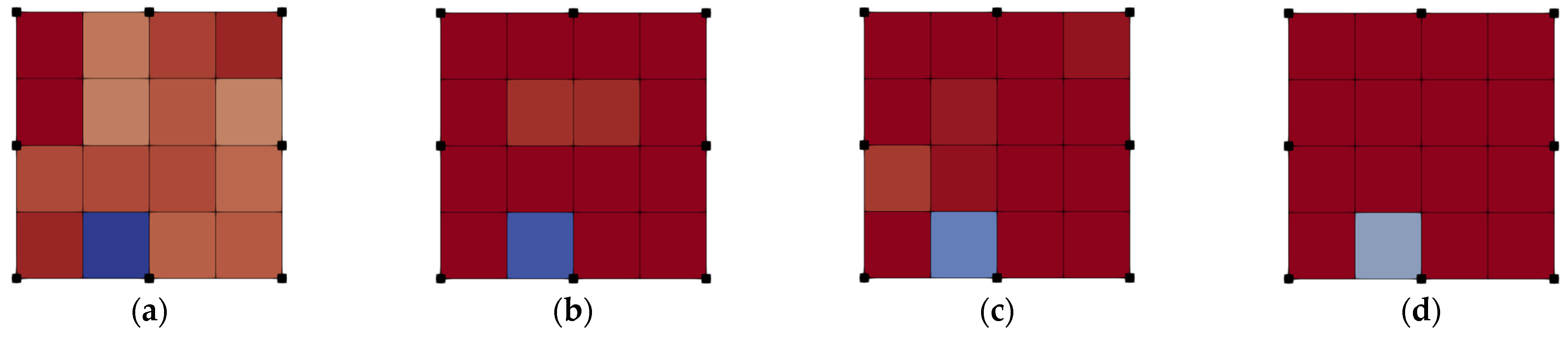
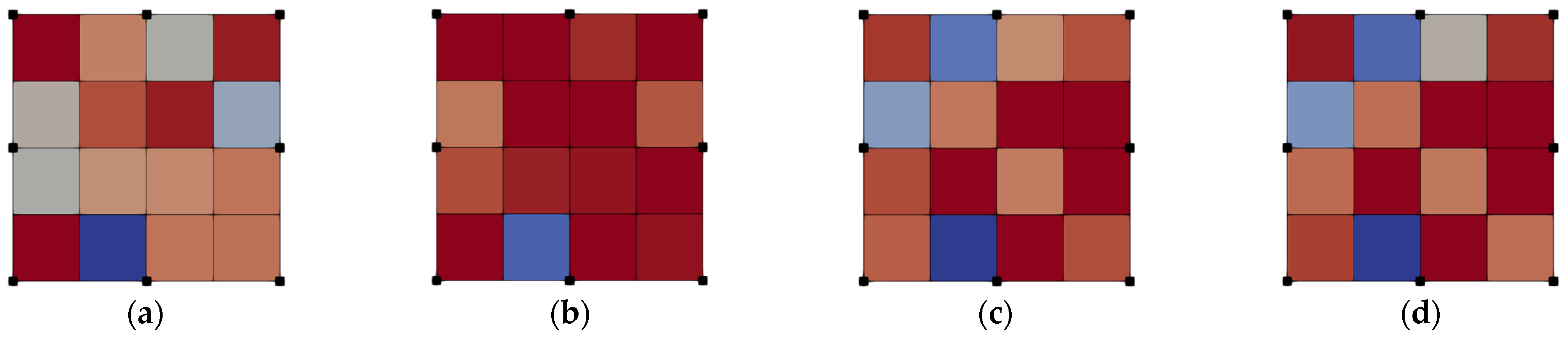
- In all of the cases, there is the tendency that the identified elastic wave velocity is improved in the soundness area, while it is degraded in the damaged area.
- In some of the worst cases, the normalization error of the elastic wave velocity distribution is worse. However, its effect is be significant for evaluation of the damage since the change in the distribution is not severe.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yun, H.D.; Choi, W.C.; Seo, S.Y. Acoustic emission activities and damage evaluation of reinforced concrete beams strengthened with CFRP sheets. NDT E Int. 2010, 43, 615–628. [Google Scholar] [CrossRef]
- Ciampa, F.; Meo, M. A new algorithm for acoustic emission localization and flexural group velocity determination in anisotropic structures. Compos. Part A Appl. Sci. Manuf. 2010, 41, 1777–1786. [Google Scholar] [CrossRef]
- Yapar, O.; Basu, P.K.; Volgyesi, P.; Ledeczi, A. Structural health monitoring of bridges with piezoelectric AE sensors. Eng. Fail. Anal. 2015, 56, 150–169. [Google Scholar] [CrossRef]
- Kawasaki, Y.; Ueda, K.; Izuno, K. AE source location of debonding steel-rod inserted and adhered inside rubber. Constr. Build. Mater. 2021, 279, 122383. [Google Scholar] [CrossRef]
- Kundu, T. Acoustic source localization. Ultrasonics 2014, 54, 25–38. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Qin, C.Z.; Niu, Y.; Li, R.; Song, Z.; Wang, X. A method for monitoring acoustic emissions in geological media under coupled 3-D stress and fluid flow. J. Pet. Sci. Eng. 2022, 211, 110227. [Google Scholar] [CrossRef]
- Li, X.; Lin, W.; Mao, W.; Koseki, J. Acoustic emission source location of saturated dense coral sand in triaxial compression tests. In Proceedings of the 8th Japan-China Geotechnical Symposium, Kyoto, Japan, 28–29 September 2020; pp. 14–15. [Google Scholar]
- Mao, W.; Goto, S.; Towhata, I. A study on particle breakage behavior during pile penetration process using acoustic emission source location. Geosci. Front. 2020, 11, 413–427. [Google Scholar] [CrossRef]
- Sagradyan, A.; Ogra, N.; Shiotani, T. Application of elastic wave tomography method for damage evaluation in a large-scale reinforced concrete structure. Dev. Built Environ. 2023, 14, 100127. [Google Scholar] [CrossRef]
- Schubert, F. Basic Principles of Acoustic Emission Tomography. J. Acoust. Emiss. 2004, 22, 147–158. [Google Scholar]
- Sassa, K.; Ashida, Y.; Kozawa, T.; Yamada, M. Improvement in the accuracy of seismic tomography by use of an effective ray-tracing algorithm. In Proceedings of the MMIJ/IMM Joint Symposium Volume of Papers, Kyoto, Japan, 2–4 October 1989; pp. 129–136. [Google Scholar]
- Kobayashi, Y. Mesh-independent ray-trace algorithm for concrete structure. Constr. Build. Mater. 2013, 48, 1309–1317. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Shiotani, T. Innovative AE and NDT Techniques for On-Site Measurement of Concrete and Masonry. In Structures: State-of-the-Art Report of the RILEM Technical Committee 239-MCM, 1st ed.; Ohtsu, M., Ed.; Springer: Dordrecht, The Netherlands, 2016; pp. 47–68. [Google Scholar]
- Shiotani, T.; Osawa, S.; Kobayashi, Y.; Momoki, S. Application of 3D AE tomography for triaxial tests of rocky specimens. In Proceedings of the 31st Conference of the European Working Group on Acoustic Emission, Dresden, Germany, 3–5 September 2014. [Google Scholar]
- Kobayashi, Y.; Nakamura, K.; Oda, K. New algorithm of Acoustic Emission Tomography that considers change of emission times of AE events during identification of elastic wave velocity distribution. In Proceedings of the 11th International Conference on Bridge Maintenance, Safety and Management, Barcelona, Spain, 11–15 July 2022. [Google Scholar]
- Akaike, H. A new look at the statistical model identification. IEEE Trans. Autom. Control 1974, 19, 716–723. [Google Scholar] [CrossRef]
- Nakamura, K.; Kobayashi, Y.; Oda, K.; Shigemura, S. Classification of Elastic Wave for Non-Destructive Inspections Based on Self-Organizing Map. Sustainability 2023, 15, 4846. [Google Scholar] [CrossRef]
- Takanami, T.; Kitagawa, G. A new efficient procedure for the estimation of onset times of seismic waves. J. Phys. Earth 1988, 36, 267–290. [Google Scholar] [CrossRef]
- Sedlak, P.; Hirose, Y.; Enoki, M. Acoustic emission localization in thin multi-layer plates using first-arrival determination. Mech. Syst. Signal Process. 2013, 36, 636–649. [Google Scholar] [CrossRef]
- Ohno, K.; Ohtsu, M. Crack classification in concrete based on acoustic emission. Constr. Build. Mater. 2010, 24, 2339–2346. [Google Scholar] [CrossRef]
- Kohonen, T. Essentials of the self-organizing map. Neural Netw. 2013, 37, 52–65. [Google Scholar] [CrossRef] [PubMed]
- Nakamura, K.; Kobayashi, Y.; Oda, K.; Shigemura, S. Application of Classified Elastic Waves for AE Source Localization Based on Self-Organizing Map. Appl. Sci. 2023, 13, 5745. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of elements | 16 |
| Number of nodes | 25 |
| Model size (m × m) | 0.40 × 0.40 |
| Interval of candidate points (cm) | 1.0 |
| Elastic wave velocity in soundness condition (m/s) | 4000 |
| Damaged part elastic wave velocity (m/s) | 3000 |
| Number of events | 16 |
| Observation error ratio | 0.05~0.15 |
| Number of analyses with different errors at each observed error ratio | 100 |
| Number of sensors | 8 |
| Sensors | x (m) | y (m) |
|---|---|---|
| S1 | 0.0 | 0.0 |
| S2 | 0.2 | 0.0 |
| S3 | 0.4 | 0.0 |
| S4 | 0.0 | 0.2 |
| S5 | 0.4 | 0.2 |
| S6 | 0.0 | 0.4 |
| S7 | 0.2 | 0.4 |
| S8 | 0.4 | 0.4 |
| Events | x (m) | y (m) |
|---|---|---|
| E1 | 0.08 | 0.08 |
| E2 | 0.16 | 0.08 |
| E3 | 0.24 | 0.08 |
| E4 | 0.32 | 0.08 |
| E5 | 0.08 | 0.16 |
| E6 | 0.16 | 0.16 |
| E7 | 0.24 | 0.16 |
| E8 | 0.32 | 0.16 |
| E9 | 0.08 | 0.24 |
| E10 | 0.16 | 0.24 |
| E11 | 0.24 | 0.24 |
| E12 | 0.32 | 0.24 |
| E13 | 0.08 | 0.32 |
| E14 | 0.16 | 0.32 |
| E15 | 0.24 | 0.32 |
| E16 | 0.32 | 0.32 |
| Residuals of the Normalization Error | ||||
| Maximum | Minimum | Average | ||
| Observation error ratio E | 0.05 | 0.538152 | −0.1221 | 0.139588 |
| 0.10 | 0.927147 | −0.11333 | 0.284763 | |
| 0.15 | 1.596866 | −0.28338 | 0.547291 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Furukawa, M.; Nakamura, K.; Oda, K.; Shigemura, S.; Kobayashi, Y. Identifying Elastic Wave Velocity Distribution with Observation Arrival Time Errors Using Weighted Potential Time in Acoustic Emission Tomography. Appl. Sci. 2024, 14, 7040. https://doi.org/10.3390/app14167040
Furukawa M, Nakamura K, Oda K, Shigemura S, Kobayashi Y. Identifying Elastic Wave Velocity Distribution with Observation Arrival Time Errors Using Weighted Potential Time in Acoustic Emission Tomography. Applied Sciences. 2024; 14(16):7040. https://doi.org/10.3390/app14167040
Chicago/Turabian StyleFurukawa, Mikika, Katsuya Nakamura, Kenichi Oda, Satoshi Shigemura, and Yoshikazu Kobayashi. 2024. "Identifying Elastic Wave Velocity Distribution with Observation Arrival Time Errors Using Weighted Potential Time in Acoustic Emission Tomography" Applied Sciences 14, no. 16: 7040. https://doi.org/10.3390/app14167040
APA StyleFurukawa, M., Nakamura, K., Oda, K., Shigemura, S., & Kobayashi, Y. (2024). Identifying Elastic Wave Velocity Distribution with Observation Arrival Time Errors Using Weighted Potential Time in Acoustic Emission Tomography. Applied Sciences, 14(16), 7040. https://doi.org/10.3390/app14167040