
The Sense of Agency in Human–Machine Interaction Systems



Abstract
:1. Introduction
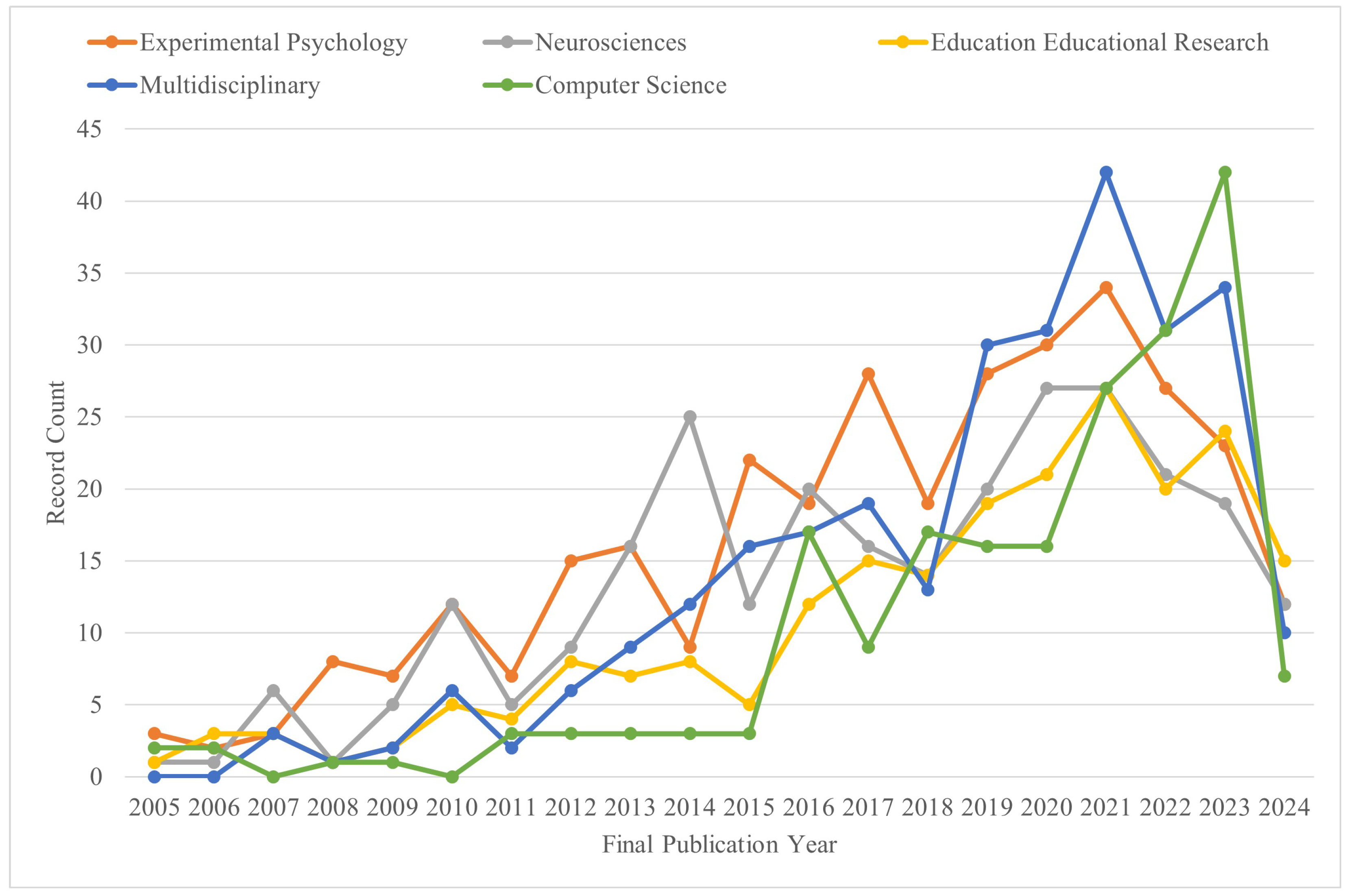
- Experimental psychology and neurosciences: Both fields experienced declines after reaching their peaks in 2021 and 2020, respectively.
- Education educational research and multidisciplinary: Although the number of SoA papers declined after reaching their peak, a rebound occurred in 2021.
- Computer science: Over the years, the number of published articles in this field has shown an overall upward trend. Since 2018, it has experienced rapid growth, culminating in a peak in 2023. We anticipate further increases in publications in the field.
- This review focuses on the characteristics of HMI systems (complexity, variability, and continuity) and summarizes and analyzes the existing research on methods for SoA measurement and improvement spanning the period from 2000 to 2024, with the following findings:
- The overall SoA in HMI systems deserves attention, and explicit measurement still has great potential.
- Improving transparency and employing appropriate automated assistance can effectively improve the SoA.
- This review provides suggestions for SoA research. Routes to improve the SoA in HMI systems are first identified. Then, two potential directions for SoA research are suggested. Firstly, the impact of the experience obtained by using the identified HMI systems on the SoA deserves more attention. We believe that the SoA dynamically changes in an HMI system, because the operator’s feeling changes, their experience/knowledge increases, and their learning ability is improved with the progressive use of the system. HMI systems are designed as long-lifespan solutions, so the SoA in both the transition stage and stable stage should be considered when designing and using HMI systems. Secondly, we explored the potential of SoA as a bond to facilitate seamless communication between humans and machines. We emphasized that the accurate and real-time measurement of dynamic changes in human behavior is critical for achieving unconscious communication.
- This review proposes a development route, which is divided into three stages: machine-centric, human-centric, and human–machine integration. The first stage, machine-centric, aims to increase the operator’s SoA by adjusting the machine. The second stage, human-centric, mainly develops human–machine communication (HMC) technology, allowing machines to communicate unconsciously with humans. In the third stage, human–machine integration, the machine begins to have “thoughts” and understand human emotions, intentions, and feelings. The machine adjusts itself to adapt to humans, moving toward a tacit agreement with humans.
- In addition, the potential to apply existing gaming platforms as HMI systems in SoA research is analyzed.
2. The SoA: Definition and Influencing Factors
2.1. The Definition of the SoA
2.2. Influencing Factors of the SoA
2.2.1. Attention and Cognitive Resources
2.2.2. Operating Performance
2.2.3. Automation Assistance
2.2.4. System Transparency
- Machine: It reflects the information that the machine feeds back to the operator.
- Operator: It is the degree of the operator’s understanding of the impact of their actions.
3. Measurement of the SoA
3.1. Explicit Measurement
3.2. Implicit Measurement
3.3. How to Measure the SoA in Continuous Tasks within HMI Systems
- Using cameras to recognize the operator’s emotions.
- Employing eye-tracking and an EEG to analyze changes in the operator’s attention.
- Analyzing changes in the operator’s physical state through electromyography, blood pressure, and other physiological signals.
- Utilizing multiple physiological signals to model and numerically analyze the SoA.
- Transient SoA: The transient SoA refers to the SoA of an action, and its impact on the environment can be explained using the CM.
- Overall SoA: The overall SoA refers to the SoA upon the completion of a continuous task (a composite of a series of actions) and the impacts on the environment, which requires operators to compare and analyze the previous and current operation experiences, and finally, the overall SoA is explained using the MWM.
4. Improving the SoA
4.1. Improving the SoA in a Teleoperation System
4.2. Improving the SoA in Driving Assistance Systems
4.3. Improving the SoA in Human–Robot Joint Actions
- Agent: Something or someone that can act on its own and produce changes in the world.
- Device: A device is an artifact whose purpose is to serve as an instrument in a specific subclass of a process.
4.4. How to Improve the SoA in General HMI Systems
4.4.1. Improving the Transparency of HMI Systems
- The machine’s intention is shared with the human: the human operator obtains/predicts the robot’s intention in advance before the machine moves [81].
- The human operator’s intention is shared with the machine: the human operator shares their intention with the machine when performing tasks, and the machine performs the same actions as the human based on the human’s intentions [77].
4.4.2. Employing Appropriate Automation Assistance
4.4.3. Hybrid Methods
5. Discussion
5.1. The Impact of the Operator’s Experience on the Dynamically Changing SoA
- Initial stage: After the minimum learning time, the operator has just started to use the HMI system, and the SoA is greatly affected by the operator’s subjective feelings.
- Transition stage: At this stage, the operator’s proficiency in using the HMI system gradually increases over time, so the transparency and performance gradually improve, which finally leads to an increase in the SoA.
- Stable stage: The operator has mastered the HMI system proficiently and acquired plenty of experience and an unconscious CM. At this stage, the SoA reaches a stable high state.
- Phase Definition and Characterization: Clearly define the three phases of HMI use: initial, transitional, and stable. Identify key characteristics and measurable variables for each phase (e.g., subjective perception, proficiency, transparency, and performance).
- Experiential Factors: Investigate the specific factors that lead to SoA changes in each phase (e.g., learning mechanisms, trust development, and operator’s mental models). Distinguish between conscious and unconscious learning accompanying learning processes.
- Longitudinal Studies: Design long-term studies that track operators’ SoA over a longer period of time to observe transitions between phases. Include frequent and detailed evaluations to capture subtle changes in the SoA. Apply the framework to different types of HMI systems (e.g., autonomous vehicles and remote control systems) and test and improve the framework in real-world environments.
5.2. The SoA as a Bond of HMC
- Measure and analyze the SoA: Use tools to accurately measure the operator’s SoA. This can include explicit measurement (e.g., questionnaires) [87] and implicit measurement [87] (e.g., intentional binding). Analyzing these data can help elucidate how different factors affect the SoA and improve the HMI system accordingly.
- Implement advanced sensing technologies: Utilize sensors that can capture a variety of explicit information from operators, such as gestures, facial expressions, and voice intonation. These data can be processed using computer vision and speech recognition techniques to infer the operator’s intent and emotions [113].
- Develop adaptive algorithms: Create algorithms that enable the machine to adjust its behavior in real time based on the operator’s inferred intent and emotions. This may involve machine learning models trained on human experience data to dynamically predict and respond to the operator’s needs [151].
- Incorporate self-awareness into machines: Design systems with self-awareness so that machines understand their own behavior and its impact on the environment. This self-awareness can be modeled using a synthetic agent framework, where machines can evaluate and modify their behavior to align with the operator’s SoA [112].
- Iterative testing and feedback: Regularly test HMI systems with real users to collect feedback and make iterative improvements. This process ensures that the system is aligned with user needs and continues to effectively enhance the SoA.
6. The Proposed Route for the Future Development of HMI Systems
- The first stage is machine-centric. This stage aims to increase the operator’s SoA by adjusting the machine. To maintain the balance between the SoA and operation performance, the machine’s weight in shared control is adaptively adjusted according to the difficulties of tasks (level 1). Furthermore, when the transparency of the HMI system is increased, the operator can understand the intention of the machine and, therefore, trust and accept the machine (level 2). Most of the existing HMI systems are in this stage.
- The second stage is human-centric, which aims to enhance the SoA by HMC. In this stage, the machine begins to gradually act like a human. In the third level, “Exist” in Figure 6, the human operator gets used to and accepts the existence of the machine and, therefore, does not pay attention to the machine deliberately. Even if the human operator and machine communicate preliminarily through control instructions and feedback information in level 3, the existence of the machine does not affect the SoA. At the fourth level, “Communicate”, the machine begins to have the ability to understand human intention preliminarily via motions, body language, linguistic information, and so on, and then gives feedback accordingly. At this level, the human operator also begins to slowly regard the machine as their collaborator. This level marks a change in the way the human and the machine interact. When it develops to the fifth level, “Unconscious”, the machine fully understands human intention and emotions, with a certain logical judgment ability. So, it can communicate freely with the human operator like a person, and the human operator already regards the machine as their collaborator from the previous level. At level 5, when performing HMI tasks, the human operator is not aware that they are collaborating with a robot.
- The third stage is to enhance the SoA by making machines “think”. At the sixth level, “Symbiosis”, human transparency begins to be considered. The machine begins to have “thoughts” and understand human emotions, intentions, and feelings, like a person. Then, the machine will adjust itself to adapt to humans based on the obtained human operator’s emotions, intentions, and feelings. Therefore, mental human–machine integration is achieved. At the highest level, “Accompany”, the machine also has emotions and feelings, so it is no longer a collaborator but a partner, or even a confidant. In HMI systems, the machine will express its feelings through expressions, making humans feel that they are interacting with people rather than machines.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dekker, S.W.; Woods, D.D. MABA-MABA or abracadabra? Progress on human–automation co-ordination. Cogn. Technol. Work. 2002, 4, 240–244. [Google Scholar] [CrossRef]
- Bütepage, J.; Kragic, D. Human-robot collaboration: From psychology to social robotics. arXiv 2017, arXiv:1705.10146. [Google Scholar]
- Endsley, M.R.; Kiris, E.O. The out-of-the-loop performance problem and level of control in automation. Hum. Factors 1995, 37, 381–394. [Google Scholar] [CrossRef]
- Kaber, D.B.; Endsley, M.R. Out-of-the-loop performance problems and the use of intermediate levels of automation for improved control system functioning and safety. Process. Saf. Prog. 1997, 16, 126–131. [Google Scholar] [CrossRef]
- Ibrahim, M.A.; Assaad, Z.; Williams, E. Trust and communication in human-machine teaming. Front. Phys. 2022, 10, 942896. [Google Scholar] [CrossRef]
- CNN Business Safety Driver in Fatal 2018 Uber Self-Driving Car Crash Found Guilty of Endangerment. Available online: https://edition.cnn.com/2023/07/29/business/uber-self-driving-car-death-guilty/index.html (accessed on 27 July 2024).
- Berberian, B.; Somon, B.; Sahaï, A.; Gouraud, J. The out-of-the-loop Brain: A neuroergonomic approach of the human automation interaction. Annu. Rev. Control. 2017, 44, 303–315. [Google Scholar] [CrossRef]
- Pacherie, E. The sense of control and the sense of agency. Psyche 2007, 13, 1–30. [Google Scholar]
- Bigenwald, A.; Chambon, V. Criminal responsibility and neuroscience: No revolution yet. Front. Psychol. 2019, 10, 1406. [Google Scholar] [CrossRef] [PubMed]
- Di Costa, S.; Théro, H.; Chambon, V.; Haggard, P. Try and try again: Post-error boost of an implicit measure of agency. Q. J. Exp. Psychol. 2018, 71, 1584–1595. [Google Scholar] [CrossRef] [PubMed]
- Park, K.H.; Lee, H.E.; Kim, Y.; Bien, Z.Z. A steward robot for human-friendly human-machine interaction in a smart house environment. IEEE Trans. Autom. Sci. Eng. 2008, 5, 21–25. [Google Scholar] [CrossRef]
- Strausser, K.A.; Kazerooni, H. The development and testing of a human machine interface for a mobile medical exoskeleton. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 4911–4916. [Google Scholar]
- Schiele, A.; Van Der Helm, F.C. Kinematic design to improve ergonomics in human machine interaction. IEEE Trans. Neural Syst. Rehabil. Eng. 2006, 14, 456–469. [Google Scholar] [CrossRef] [PubMed]
- Schnieders, T.M.; Stone, R.T. Current work in the human-machine interface for ergonomic intervention with exoskeletons. Int. J. Robot. Appl. Technol. (IJRAT) 2017, 5, 1–19. [Google Scholar] [CrossRef]
- Kasahara, S.; Konno, K.; Owaki, R.; Nishi, T.; Takeshita, A.; Ito, T.; Kasuga, S.; Ushiba, J. Malleable embodiment: Changing sense of embodiment by spatial-temporal deformation of virtual human body. In Proceedings of the 2017 CHI Conference on Human Factors in Computing Systems, Denver, CO, USA, 6–11 May 2017; pp. 6438–6448. [Google Scholar]
- Gonzalez-Franco, M.; Cohn, B.; Ofek, E.; Burin, D.; Maselli, A. The self-avatar follower effect in virtual reality. In Proceedings of the 2020 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), Atlanta, GA, USA, 22–26 March 2020; pp. 18–25. [Google Scholar]
- Barlas, Z.; Obhi, S.S. Freedom, choice, and the sense of agency. Front. Hum. Neurosci. 2013, 7, 514. [Google Scholar] [CrossRef] [PubMed]
- Battaglia, F. Agency, Responsibility, Selves, and the Mechanical Mind. Philosophies 2021, 6, 7. [Google Scholar] [CrossRef]
- Caspar, E.A.; Christensen, J.F.; Cleeremans, A.; Haggard, P. Coercion changes the sense of agency in the human brain. Curr. Biol. 2016, 26, 585–592. [Google Scholar] [CrossRef]
- Haggard, P. Sense of agency in the human brain. Nat. Rev. Neurosci. 2017, 18, 196–207. [Google Scholar] [CrossRef]
- Demanet, J.; Muhle-Karbe, P.S.; Lynn, M.T.; Blotenberg, I.; Brass, M. Power to the will: How exerting physical effort boosts the sense of agency. Cognition 2013, 129, 574–578. [Google Scholar] [CrossRef]
- Vinding, M.C.; Pedersen, M.N.; Overgaard, M. Unravelling intention: Distal intentions increase the subjective sense of agency. Conscious. Cogn. 2013, 22, 810–815. [Google Scholar] [CrossRef]
- Reddy, N.N. Non-motor cues do not generate the perception of self-agency: A critique of cue-integration. Conscious. Cogn. 2022, 103, 103359. [Google Scholar] [CrossRef]
- Haering, C.; Kiesel, A. Was it me when it happened too early? Experience of delayed effects shapes sense of agency. Cognition 2015, 136, 38–42. [Google Scholar] [CrossRef] [PubMed]
- Wen, W.; Imamizu, H. The sense of agency in perception, behaviour and human–machine interactions. Nat. Rev. Psychol. 2022, 1, 211–222. [Google Scholar] [CrossRef]
- Cornelio, P.; Haggard, P.; Hornbaek, K.; Georgiou, O.; Bergström, J.; Subramanian, S.; Obrist, M. The sense of agency in emerging technologies for human–computer integration: A review. Front. Neurosci. 2022, 16, 949138. [Google Scholar] [CrossRef] [PubMed]
- Limerick, H.; Coyle, D.; Moore, J.W. The experience of agency in human-computer interactions: A review. Front. Hum. Neurosci. 2014, 8, 643. [Google Scholar] [CrossRef]
- Sahaï, A.; Pacherie, E.; Grynszpan, O.; Berberian, B. Predictive mechanisms are not involved the same way during human-human vs. human-machine interactions: A review. Front. Neurorobotics 2017, 11, 52. [Google Scholar] [CrossRef] [PubMed]
- Hafner, V.V.; Loviken, P.; Pico Villalpando, A.; Schillaci, G. Prerequisites for an artificial self. Front. Neurorobotics 2020, 14, 5. [Google Scholar] [CrossRef]
- Nandiyanto, A.B.D.; Al Husaeni, D.F. A bibliometric analysis of materials research in Indonesian journal using VOSviewer. J. Eng. Res. 2021, 9, 1–16. [Google Scholar] [CrossRef]
- Yu, L.; Yu, Z. Qualitative and quantitative analyses of artificial intelligence ethics in education using VOSviewer and CitNetExplorer. Front. Psychol. 2023, 14, 1061778. [Google Scholar] [CrossRef] [PubMed]
- Chatila, R.; Renaudo, E.; Andries, M.; Chavez-Garcia, R.O.; Luce-Vayrac, P.; Gottstein, R.; Alami, R.; Clodic, A.; Devin, S.; Girard, B.; et al. Toward self-aware robots. Front. Robot. AI 2018, 5, 88. [Google Scholar] [CrossRef] [PubMed]
- Gallagher, S. Philosophical conceptions of the self: Implications for cognitive science. Trends Cogn. Sci. 2000, 4, 14–21. [Google Scholar] [CrossRef]
- Loehr, J.D. The sense of agency in joint action: An integrative review. Psychon. Bull. Rev. 2022, 29, 1089–1117. [Google Scholar] [CrossRef]
- Wen, W. Does delay in feedback diminish sense of agency? A review. Conscious. Cogn. 2019, 73, 102759. [Google Scholar] [CrossRef] [PubMed]
- Wen, W.; Kuroki, Y.; Asama, H. The sense of agency in driving automation. Front. Psychol. 2019, 10, 2691. [Google Scholar] [CrossRef] [PubMed]
- Howard, E.E.; Edwards, S.G.; Bayliss, A.P. Physical and mental effort disrupts the implicit sense of agency. Cognition 2016, 157, 114–125. [Google Scholar] [CrossRef] [PubMed]
- Blakemore, S.J.; Wolpert, D.M.; Frith, C.D. Central cancellation of self-produced tickle sensation. Nat. Neurosci. 1998, 1, 635–640. [Google Scholar] [CrossRef] [PubMed]
- Blakemore, S.J.; Frith, C.D.; Wolpert, D.M. The cerebellum is involved in predicting the sensory consequences of action. Neuroreport 2001, 12, 1879–1884. [Google Scholar] [CrossRef]
- Blakemore, S.J.; Wolpert, D.M.; Frith, C.D. Abnormalities in the awareness of action. Trends Cogn. Sci. 2002, 6, 237–242. [Google Scholar] [CrossRef] [PubMed]
- Wegner, D.M.; Sparrow, B.; Winerman, L. Vicarious agency: Experiencing control over the movements of others. J. Personal. Soc. Psychol. 2004, 86, 838. [Google Scholar] [CrossRef] [PubMed]
- Robinson, J.D.; Wagner, N.F.; Northoff, G. Is the sense of agency in schizophrenia influenced by resting-state variation in self-referential regions of the brain? Schizophr. Bull. 2016, 42, 270–276. [Google Scholar] [CrossRef] [PubMed]
- Moore, J.W.; Fletcher, P.C. Sense of agency in health and disease: A review of cue integration approaches. Conscious. Cogn. 2012, 21, 59–68. [Google Scholar] [CrossRef]
- Synofzik, M.; Thier, P.; Leube, D.T.; Schlotterbeck, P.; Lindner, A. Misattributions of agency in schizophrenia are based on imprecise predictions about the sensory consequences of one’s actions. Brain 2010, 133, 262–271. [Google Scholar] [CrossRef] [PubMed]
- Synofzik, M.; Vosgerau, G.; Lindner, A. Me or not me—An optimal integration of agency cues? Conscious. Cogn. 2009, 18, 1065–1068. [Google Scholar] [CrossRef]
- Synofzik, M.; Vosgerau, G.; Voss, M. The experience of agency: An interplay between prediction and postdiction. Front. Psychol. 2013, 4, 127. [Google Scholar] [CrossRef]
- Wegner, D.M.; Sparrow, B. Authorship Processing. In Cognitive Neurosciences III; Gazzaniga, M., Ed.; MIT Press: Cambridge, MA, USA, 2004; pp. 1201–1209. [Google Scholar]
- Moore, J.W.; Wegner, D.M.; Haggard, P. Modulating the sense of agency with external cues. Conscious. Cogn. 2009, 18, 1056–1064. [Google Scholar] [CrossRef]
- Kranick, S.M.; Hallett, M. Neurology of volition. Exp. Brain Res. 2013, 229, 313–327. [Google Scholar] [CrossRef]
- Haggard, P. Conscious intention and motor cognition. Trends Cogn. Sci. 2005, 9, 290–295. [Google Scholar] [CrossRef] [PubMed]
- Wen, W.; Muramatsu, K.; Hamasaki, S.; An, Q.; Yamakawa, H.; Tamura, Y.; Yamashita, A.; Asama, H. Goal-directed movement enhances body representation updating. Front. Hum. Neurosci. 2016, 10, 329. [Google Scholar] [CrossRef]
- Minohara, R.; Wen, W.; Hamasaki, S.; Maeda, T.; Kato, M.; Yamakawa, H.; Yamashita, A.; Asama, H. Strength of intentional effort enhances the sense of agency. Front. Psychol. 2016, 7, 1165. [Google Scholar] [CrossRef] [PubMed]
- Caspar, E.A.; Cleeremans, A.; Haggard, P. Only giving orders? An experimental study of the sense of agency when giving or receiving commands. PLoS ONE 2018, 13, e0204027. [Google Scholar] [CrossRef] [PubMed]
- Hon, N.; Poh, J.H.; Soon, C.S. Preoccupied minds feel less control: Sense of agency is modulated by cognitive load. Conscious. Cogn. 2013, 22, 556–561. [Google Scholar] [CrossRef] [PubMed]
- Nakashima, R. Beyond one’s body parts: Remote object movement with sense of agency involuntarily biases spatial attention. Psychon. Bull. Rev. 2019, 26, 576–582. [Google Scholar] [CrossRef] [PubMed]
- Woollacott, M.; Shumway-Cook, A. Attention and the control of posture and gait: A review of an emerging area of research. Gait Posture 2002, 16, 1–14. [Google Scholar] [CrossRef] [PubMed]
- Lacour, M.; Bernard-Demanze, L.; Dumitrescu, M. Posture control, aging, and attention resources: Models and posture-analysis methods. Neurophysiol. Clin. Neurophysiol. 2008, 38, 411–421. [Google Scholar] [CrossRef] [PubMed]
- Kannape, O.A.; Barré, A.; Aminian, K.; Blanke, O. Cognitive loading affects motor awareness and movement kinematics but not locomotor trajectories during goal-directed walking in a virtual reality environment. PLoS ONE 2014, 9, e85560. [Google Scholar] [CrossRef] [PubMed]
- Shepherd, J. Conscious cognitive effort in cognitive control. Wiley Interdiscip. Rev. Cogn. Sci. 2023, 14, e1629. [Google Scholar] [CrossRef] [PubMed]
- Dietrich, A. Functional neuroanatomy of altered states of consciousness: The transient hypofrontality hypothesis. Conscious. Cogn. 2003, 12, 231–256. [Google Scholar] [CrossRef]
- Dietrich, A.; Sparling, P.B. Endurance exercise selectively impairs prefrontal-dependent cognition. Brain Cogn. 2004, 55, 516–524. [Google Scholar] [CrossRef] [PubMed]
- Franconeri, S.L.; Alvarez, G.A.; Cavanagh, P. Flexible cognitive resources: Competitive content maps for attention and memory. Trends Cogn. Sci. 2013, 17, 134–141. [Google Scholar] [CrossRef] [PubMed]
- Howard, E. The Effect of Effort and Individual Differences on the Implicit Sense of Agency. Ph.D. Thesis, University of East Anglia, Norwich, UK, 2016. [Google Scholar]
- Block, R.A.; Hancock, P.A.; Zakay, D. How cognitive load affects duration judgments: A meta-analytic review. Acta Psychol. 2010, 134, 330–343. [Google Scholar] [CrossRef]
- Nataraj, R.; Hollinger, D.; Liu, M.; Shah, A. Disproportionate positive feedback facilitates sense of agency and performance for a reaching movement task with a virtual hand. PLoS ONE 2020, 15, e0233175. [Google Scholar] [CrossRef]
- Metcalfe, J.; Greene, M.J. Metacognition of agency. J. Exp. Psychol. Gen. 2007, 136, 184. [Google Scholar] [CrossRef]
- Wen, W.; Yamashita, A.; Asama, H. The sense of agency during continuous action: Performance is more important than action-feedback association. PLoS ONE 2015, 10, e0125226. [Google Scholar] [CrossRef] [PubMed]
- Inoue, K.; Takeda, Y.; Kimura, M. Sense of agency in continuous action: Assistance-induced performance improvement is self-attributed even with knowledge of assistance. Conscious. Cogn. 2017, 48, 246–252. [Google Scholar] [CrossRef] [PubMed]
- van der Wel, R.P.; Sebanz, N.; Knoblich, G. The sense of agency during skill learning in individuals and dyads. Conscious. Cogn. 2012, 21, 1267–1279. [Google Scholar] [CrossRef] [PubMed]
- Norman, D.A. The ‘problem’ with automation: Inappropriate feedback and interaction, not ‘over-automation’. Philos. Trans. R. Soc. Lond. B Biol. Sci. 1990, 327, 585–593. [Google Scholar] [PubMed]
- Berberian, B.; Sarrazin, J.C.; Le Blaye, P.; Haggard, P. Automation technology and sense of control: A window on human agency. PLoS ONE 2012, 7, e34075. [Google Scholar] [CrossRef] [PubMed]
- Yun, S.; Wen, W.; An, Q.; Hamasaki, S.; Yamakawa, H.; Tamura, Y.; Yamashita, A.; Asama, H. Investigating the relationship between assisted driver’s SoA and EEG. In Proceedings of the International Conference on NeuroRehabilitation, Pisa, Italy, 16–20 October 2018; pp. 1039–1043. [Google Scholar]
- Grynszpan, O.; Sahaï, A.; Hamidi, N.; Pacherie, E.; Berberian, B.; Roche, L.; Saint-Bauzel, L. The sense of agency in human-human vs human-robot joint action. Conscious. Cogn. 2019, 75, 102820. [Google Scholar] [CrossRef] [PubMed]
- Sahaï, A.; Desantis, A.; Grynszpan, O.; Pacherie, E.; Berberian, B. Action co-representation and the sense of agency during a joint Simon task: Comparing human and machine co-agents. Conscious. Cogn. 2019, 67, 44–55. [Google Scholar] [CrossRef] [PubMed]
- Zanatto, D.; Chattington, M.; Noyes, J. Sense of agency in human-machine interaction. In Advances in Neuroergonomics and Cognitive Engineering: Proceedings of the AHFE 2021 Virtual Conferences on Neuroergonomics and Cognitive Engineering, Industrial Cognitive Ergonomics and Engineering Psychology, and Cognitive Computing and Internet of Things, New York, NY, USA, 25–29 July 2021; Springer: Berlin/Heidelberg, Germany, 2021; pp. 353–360. [Google Scholar]
- Albutihe, I. Sense of Agency and Automation: A Systematic Review. 2023. Available online: https://www.diva-portal.org/smash/record.jsf?pid=diva2:1791640 (accessed on 15 January 2024).
- Wen, W.; Yun, S.; Yamashita, A.; Northcutt, B.D.; Asama, H. Deceleration assistance mitigated the trade-off between sense of agency and driving performance. Front. Psychol. 2021, 12, 643516. [Google Scholar] [CrossRef] [PubMed]
- Vantrepotte, Q.; Berberian, B.; Pagliari, M.; Chambon, V. Leveraging human agency to improve confidence and acceptability in human-machine interactions. Cognition 2022, 222, 105020. [Google Scholar] [CrossRef] [PubMed]
- Saito, H.; Horie, A.; Maekawa, A.; Matsubara, S.; Wakisaka, S.; Kashino, Z.; Kasahara, S.; Inami, M. Transparency in human-machine mutual action. J. Robot. Mechatron. 2021, 33, 987–1003. [Google Scholar] [CrossRef]
- Lawrence, D.A. Stability and transparency in bilateral teleoperation. IEEE Trans. Robot. Autom. 1993, 9, 624–637. [Google Scholar] [CrossRef]
- Le Goff, K.; Rey, A.; Haggard, P.; Oullier, O.; Berberian, B. Agency modulates interactions with automation technologies. Ergonomics 2018, 61, 1282–1297. [Google Scholar] [CrossRef] [PubMed]
- Franck, N.; Farrer, C.; Georgieff, N.; Marie-Cardine, M.; Daléry, J.; d’Amato, T.; Jeannerod, M. Defective recognition of one’s own actions in patients with schizophrenia. Am. J. Psychiatry 2001, 158, 454–459. [Google Scholar] [CrossRef] [PubMed]
- Sato, A.; Yasuda, A. Illusion of sense of self-agency: Discrepancy between the predicted and actual sensory consequences of actions modulates the sense of self-agency, but not the sense of self-ownership. Cognition 2005, 94, 241–255. [Google Scholar] [CrossRef] [PubMed]
- Nakashima, R.; Kumada, T. Explicit sense of agency in an automatic control situation: Effects of goal-directed action and the gradual emergence of outcome. Front. Psychol. 2020, 11, 2062. [Google Scholar] [CrossRef] [PubMed]
- Dewey, J.A.; Carr, T.H. When dyads act in parallel, a sense of agency for the auditory consequences depends on the order of the actions. Conscious. Cogn. 2013, 22, 155–166. [Google Scholar] [CrossRef] [PubMed]
- Frith, C.D.; Blakemore, S.J.; Wolpert, D.M. Abnormalities in the awareness and control of action. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 2000, 355, 1771–1788. [Google Scholar] [CrossRef] [PubMed]
- Haggard, P.; Clark, S.; Kalogeras, J. Voluntary action and conscious awareness. Nat. Neurosci. 2002, 5, 382–385. [Google Scholar] [CrossRef] [PubMed]
- Weiss, C.; Herwig, A.; Schütz-Bosbach, S. The self in action effects: Selective attenuation of self-generated sounds. Cognition 2011, 121, 207–218. [Google Scholar] [CrossRef] [PubMed]
- Bays, P.M.; Flanagan, J.R.; Wolpert, D.M. Attenuation of self-generated tactile sensations is predictive, not postdictive. PLoS Biol. 2006, 4, e28. [Google Scholar] [CrossRef] [PubMed]
- Synofzik, M.; Thier, P.; Lindner, A. Internalizing agency of self-action: Perception of one’s own hand movements depends on an adaptable prediction about the sensory action outcome. J. Neurophysiol. 2006, 96, 1592–1601. [Google Scholar] [CrossRef]
- Waszak, F.; Cardoso-Leite, P.; Hughes, G. Action effect anticipation: Neurophysiological basis and functional consequences. Neurosci. Biobehav. Rev. 2012, 36, 943–959. [Google Scholar] [CrossRef]
- Roussel, C.; Hughes, G.; Waszak, F. A preactivation account of sensory attenuation. Neuropsychologia 2013, 51, 922–929. [Google Scholar] [CrossRef]
- Kilteni, K.; Ehrsson, H.H. Body ownership determines the attenuation of self-generated tactile sensations. Proc. Natl. Acad. Sci. USA 2017, 114, 8426–8431. [Google Scholar] [CrossRef] [PubMed]
- Libet, B.; Wright, E.; Gleason, C. Readiness-potentials preceding unrestricted “spontaneous” vs. pre-planned voluntary acts. Electroencephalogr. Clin. Neurophysiol. 1982, 54, 322–335. [Google Scholar] [CrossRef]
- Imaizumi, S.; Tanno, Y. Intentional binding coincides with explicit sense of agency. Conscious. Cogn. 2019, 67, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Gibbon, J.; Church, R.M.; Meck, W.H. Scalar timing in memory. Ann. N. Y. Acad. Sci. 1984, 423, 52–77. [Google Scholar] [CrossRef] [PubMed]
- Treisman, M. Temporal discrimination and the indifference interval: Implications for a model of the “internal clock”. Psychol. Monogr. Gen. Appl. 1963, 77, 1. [Google Scholar] [CrossRef] [PubMed]
- Matell, M.S.; Meck, W.H. Cortico-striatal circuits and interval timing: Coincidence detection of oscillatory processes. Cogn. Brain Res. 2004, 21, 139–170. [Google Scholar] [CrossRef] [PubMed]
- Morrone, M.C.; Ross, J.; Burr, D. Saccadic eye movements cause compression of time as well as space. Nat. Neurosci. 2005, 8, 950–954. [Google Scholar] [CrossRef] [PubMed]
- Wenke, D.; Haggard, P. How voluntary actions modulate time perception. Exp. Brain Res. 2009, 196, 311–318. [Google Scholar] [CrossRef] [PubMed]
- Kang, S.Y.; Im, C.H.; Shim, M.; Nahab, F.B.; Park, J.; Kim, D.W.; Kakareka, J.; Miletta, N.; Hallett, M. Brain networks responsible for sense of agency: An EEG study. PLoS ONE 2015, 10, e0135261. [Google Scholar] [CrossRef] [PubMed]
- Jeunet, C.; Albert, L.; Argelaguet, F.; Lécuyer, A. “Do you feel in control?”: Towards novel approaches to characterise, manipulate and measure the sense of agency in virtual environments. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1486–1495. [Google Scholar] [CrossRef]
- Zaadnoordijk, L.; Meyer, M.; Zaharieva, M.; Kemalasari, F.; van Pelt, S.; Hunnius, S. From movement to action: An EEG study into the emerging sense of agency in early infancy. Dev. Cogn. Neurosci. 2020, 42, 100760. [Google Scholar] [CrossRef]
- Wen, W.; Yamashita, A.; Asama, H. Measurement of the perception of control during continuous movement using electroencephalography. Front. Hum. Neurosci. 2017, 11, 392. [Google Scholar] [CrossRef] [PubMed]
- Sun, W.; Huang, M.; Wu, C.; Yang, R. Sense of agency on handheld AR for virtual object translation. In Proceedings of the 2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Christchurch, New Zealand, 12–16 March 2022; pp. 838–839. [Google Scholar]
- Wang, L.; Huang, M.; Qin, C.; Wang, Y.; Yang, R. Movement augmentation in virtual reality: Impact on sense of agency measured by subjective responses and electroencephalography. In Proceedings of the 2022 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW), Christchurch, New Zealand, 12–16 March 2022; pp. 832–833. [Google Scholar]
- Kühn, S.; Nenchev, I.; Haggard, P.; Brass, M.; Gallinat, J.; Voss, M. Whodunnit? Electrophysiological correlates of agency judgements. PLoS ONE 2011, 6, e28657. [Google Scholar] [CrossRef]
- Schafer, E.W.; Marcus, M.M. Self-stimulation alters human sensory brain responses. Science 1973, 181, 175–177. [Google Scholar] [CrossRef]
- Bäß, P.; Jacobsen, T.; Schröger, E. Suppression of the auditory N1 event-related potential component with unpredictable self-initiated tones: Evidence for internal forward models with dynamic stimulation. Int. J. Psychophysiol. 2008, 70, 137–143. [Google Scholar] [CrossRef] [PubMed]
- Bednark, J.G.; Poonian, S.; Palghat, K.; McFadyen, J.; Cunnington, R. Identity-specific predictions and implicit measures of agency. Psychol. Conscious. Theory Res. Pract. 2015, 2, 253. [Google Scholar] [CrossRef]
- Hughes, G.; Desantis, A.; Waszak, F. Attenuation of auditory N 1 results from identity-specific action-effect prediction. Eur. J. Neurosci. 2013, 37, 1152–1158. [Google Scholar] [CrossRef] [PubMed]
- Legaspi, R.; Xu, W.; Konishi, T.; Wada, S. Positing a sense of agency-aware persuasive AI: Its theoretical and computational frameworks. In Proceedings of the International Conference on Persuasive Technology, Virtual Event, 12–14 April 2021; pp. 3–18. [Google Scholar]
- Legaspi, R.; Xu, W.; Konishi, T.; Wada, S.; Ishikawa, Y. Multidimensional analysis of sense of agency during goal pursuit. In Proceedings of the 30th ACM Conference on User Modeling, Adaptation and Personalization, Barcelona, Spain, 4–7 July 2022; pp. 34–47. [Google Scholar]
- Tao, J.; Tan, T. Affective computing: A review. In Proceedings of the International Conference on Affective Computing and Intelligent Interaction, Beijing, China, 22–24 October 2005; pp. 981–995. [Google Scholar]
- Merat, N.; Seppelt, B.; Louw, T.; Engström, J.; Lee, J.D.; Johansson, E.; Green, C.A.; Katazaki, S.; Monk, C.; Itoh, M.; et al. The “Out-of-the-Loop” concept in automated driving: Proposed definition, measures and implications. Cogn. Technol. Work. 2019, 21, 87–98. [Google Scholar] [CrossRef]
- Wang, Z.; Zheng, R.; Kaizuka, T.; Nakano, K. Relationship between gaze behavior and steering performance for driver–automation shared control: A driving simulator study. IEEE Trans. Intell. Veh. 2018, 4, 154–166. [Google Scholar] [CrossRef]
- Takechi, T.; Nakamura, F.; Fukuoka, M.; Ienaga, N.; Sugimoto, M. The Sense of Agency, Sense of Body Ownership with a Semi-autonomous Telexistence Robot under Shared/Unshared Intention Conditions. In Proceedings of the ICAT-EGVE 2022—International Conference on Artificial Reality and Telexistence and Eurographics Symposium on Virtual Environments—Posters and Demos, Yokohama, Japan, 30 November–3 December 2022; Teo, T., Kondo, R., Eds.; The Eurographics Association: Eindhoven, The Netherlands, 2022. [Google Scholar]
- Fong, T.; Thorpe, C. Vehicle teleoperation interfaces. Auton. Robot. 2001, 11, 9–18. [Google Scholar] [CrossRef]
- Sheridan, T.B. Telerobotics, Automation, and Human Supervisory Control; MIT Press: Cambridge, MA, USA, 1992. [Google Scholar]
- Okamura, A.M. Haptic feedback in robot-assisted minimally invasive surgery. Curr. Opin. Urol. 2009, 19, 102–107. [Google Scholar] [CrossRef] [PubMed]
- Ryu, D.; Hwang, C.S.; Kang, S.; Kim, M.; Song, J.B. Wearable haptic-based multi-modal teleoperation of field mobile manipulator for explosive ordnance disposal. In Proceedings of the IEEE International Safety, Security and Rescue Rototics, Workshop, 2005, Kobe, Japan, 6–9 June 2005; pp. 75–80. [Google Scholar]
- Mo, Y.; Song, A.; Qin, H. A lightweight accessible wearable robotic interface for bimanual haptic manipulations. IEEE Trans. Haptics 2021, 15, 85–90. [Google Scholar] [CrossRef] [PubMed]
- Wang, F.; Qian, Z.; Lin, Y.; Zhang, W. Design and rapid construction of a cost-effective virtual haptic device. IEEE/ASME Trans. Mechatron. 2020, 26, 66–77. [Google Scholar] [CrossRef]
- Evangelou, G.; Georgiou, O.; Moore, J. Using virtual objects with hand-tracking: The effects of visual congruence and mid-air haptics on sense of agency. IEEE Trans. Haptics 2023, 16, 580–585. [Google Scholar] [CrossRef]
- Evangelou, G.; Limerick, H.; Moore, J. I feel it in my fingers! Sense of agency with mid-air haptics. In Proceedings of the 2021 IEEE World Haptics Conference (WHC), Montreal, QC, Canada, 6–9 July 2021; pp. 727–732. [Google Scholar]
- Bergström, J.; Knibbe, J.; Pohl, H.; Hornbæk, K. Sense of agency and user experience: Is there a link? ACM Trans. -Comput.-Hum. Interact. (TOCHI) 2022, 29, 1–22. [Google Scholar] [CrossRef]
- Bergstrom-Lehtovirta, J.; Coyle, D.; Knibbe, J.; Hornbæk, K. I really did that: Sense of agency with touchpad, keyboard, and on-skin interaction. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems, Montreal, QC, Canada, 21–26 April 2018; pp. 1–8. [Google Scholar]
- Morita, T.; Zhu, Y.; Aoyama, T.; Takeuchi, M.; Yamamoto, K.; Hasegawa, Y. Auditory Feedback for Enhanced Sense of Agency in Shared Control. Sensors 2022, 22, 9779. [Google Scholar] [CrossRef] [PubMed]
- Tanimoto, T.; Shinohara, K.; Yoshinada, H. Research on effective teleoperation of construction machinery fusing manual and automatic operation. Robomech J. 2017, 4, 14. [Google Scholar] [CrossRef]
- Pacaux-Lemoine, M.P.; Gadmer, Q.; Richard, P. Train remote driving: A Human-Machine Cooperation point of view. In Proceedings of the 2020 IEEE International Conference on Human-Machine Systems (ICHMS), Rome, Italy, 7–9 September 2020; pp. 1–4. [Google Scholar]
- Maekawa, A.; Saito, H.; Okazaki, N.; Kasahara, S.; Inami, M. Behind The Game: Implicit Spatio-Temporal Intervention in Inter-personal Remote Physical Interactions on Playing Air Hockey. In Proceedings of the ACM SIGGRAPH 2021 Emerging Technologies, Virtual, 9–13 August 2021; pp. 1–4. [Google Scholar]
- Mulder, M.; Abbink, D.A.; Boer, E.R. The effect of haptic guidance on curve negotiation behavior of young, experienced drivers. In Proceedings of the 2008 IEEE International Conference on Systems, Man and Cybernetics, Singapore, 12–15 October 2008; pp. 804–809. [Google Scholar]
- Moon, H.S.; Seo, J. Optimal action-based or user prediction-based haptic guidance: Can you do even better? In Proceedings of the 2021 CHI Conference on Human Factors in Computing Systems, Virtual, 8–13 May 2021; pp. 1–12. [Google Scholar]
- Noubissie Tientcheu, S.I.; Du, S.; Djouani, K. Review on Haptic Assistive Driving Systems Based on Drivers’ Steering-Wheel Operating Behaviour. Electronics 2022, 11, 2102. [Google Scholar] [CrossRef]
- Mohebbi, R.; Gray, R.; Tan, H.Z. Driver reaction time to tactile and auditory rear-end collision warnings while talking on a cell phone. Hum. Factors 2009, 51, 102–110. [Google Scholar] [CrossRef] [PubMed]
- Chun, J.; Han, S.H.; Park, G.; Seo, J.; Choi, S. Evaluation of vibrotactile feedback for forward collision warning on the steering wheel and seatbelt. Int. J. Ind. Ergon. 2012, 42, 443–448. [Google Scholar] [CrossRef]
- Zhao, Y.; Chevrel, P.; Claveau, F.; Mars, F. Driving with a Haptic Guidance System in Degraded Visibility Conditions: Behavioral Analysis and Identification of a Two-Point Steering Control Model. Vehicles 2022, 4, 1413–1429. [Google Scholar] [CrossRef]
- Kim, T. How Mobility Technologies Change Our Lived Experiences: A Phenomenological Approach to the Sense of Agency in the Autonomous Vehicle. Krit. Online J. Philos. 2021, 14, 23–47. [Google Scholar] [CrossRef]
- IEEE Std 1872-2015; IEEE Standard Ontologies for Robotics and Automation. IEEE: Piscataway, NJ, USA, 2015; pp. 1–60.
- Obhi, S.S.; Hall, P. Sense of agency in joint action: Influence of human and computer co-actors. Exp. Brain Res. 2011, 211, 663–670. [Google Scholar] [CrossRef]
- Stenzel, A.; Chinellato, E.; Bou, M.A.T.; Del Pobil, Á.P.; Lappe, M.; Liepelt, R. When humanoid robots become human-like interaction partners: Corepresentation of robotic actions. J. Exp. Psychol. Hum. Percept. Perform. 2012, 38, 1073. [Google Scholar] [CrossRef] [PubMed]
- Investigation of Anthropomorphic System Design Features for Sense of Agency in Automation Technologies. Available online: https://www.hfes-europe.org/wp-content/uploads/2023/05/Frenzel2023.pdf (accessed on 13 January 2024).
- Yu, X.; Hoggenmueller, M.; Tomitsch, M. Your Way or My Way: Improving Human-Robot Co-Navigation Through Robot Intent and Pedestrian Prediction Visualisations. In Proceedings of the 2023 ACM/IEEE International Conference on Human-Robot Interaction, Stockholm, Sweden, 13–16 March 2023; pp. 211–221. [Google Scholar]
- Pagliari, M.; Chambon, V.; Berberian, B. What is new with Artificial Intelligence? Human–agent interactions through the lens of social agency. Front. Psychol. 2022, 13, 954444. [Google Scholar] [CrossRef] [PubMed]
- Fu, Z.; Zhao, T.Z.; Finn, C. Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation. arXiv 2024, arXiv:2401.02117. [Google Scholar]
- Ueda, S.; Nakashima, R.; Kumada, T. Influence of levels of automation on the sense of agency during continuous action. Sci. Rep. 2021, 11, 2436. [Google Scholar] [CrossRef] [PubMed]
- Luo, J.; Lin, Z.; Li, Y.; Yang, C. A teleoperation framework for mobile robots based on shared control. IEEE Robot. Autom. Lett. 2019, 5, 377–384. [Google Scholar] [CrossRef]
- Nguyen, V.T.; Sentouh, C.; Pudlo, P.; Popieul, J.C. Model-based shared control approach for a power wheelchair driving assistance system using a force feedback joystick. Front. Control. Eng. 2023, 4, 1058802. [Google Scholar] [CrossRef]
- Sakagami, N.; Suka, M.; Kimura, Y.; Sato, E.; Wada, T. Haptic shared control applied for ROV operation support in flowing water. Artif. Life Robot. 2022, 27, 867–875. [Google Scholar] [CrossRef]
- Boessenkool, H.; Abbink, D.A.; Heemskerk, C.J.; van der Helm, F.C.; Wildenbeest, J.G. A task-specific analysis of the benefit of haptic shared control during telemanipulation. IEEE Trans. Haptics 2012, 6, 2–12. [Google Scholar] [CrossRef] [PubMed]
- Benloucif, A.; Nguyen, A.T.; Sentouh, C.; Popieul, J.C. Cooperative trajectory planning for haptic shared control between driver and automation in highway driving. IEEE Trans. Ind. Electron. 2019, 66, 9846–9857. [Google Scholar] [CrossRef]
- Legaspi, R.; Xu, W.; Konishi, T.; Wada, S.; Kobayashi, N.; Naruse, Y.; Ishikawa, Y. The sense of agency in human–AI interactions. Knowl.-Based Syst. 2024, 286, 111298. [Google Scholar] [CrossRef]
- Legaspi, R.; He, Z.; Toyoizumi, T. Synthetic agency: Sense of agency in artificial intelligence. Curr. Opin. Behav. Sci. 2019, 29, 84–90. [Google Scholar] [CrossRef]
- Inga, J.; Ruess, M.; Robens, J.H.; Nelius, T.; Rothfuß, S.; Kille, S.; Dahlinger, P.; Lindenmann, A.; Thomaschke, R.; Neumann, G.; et al. Human-machine symbiosis: A multivariate perspective for physically coupled human-machine systems. Int. J. -Hum.-Comput. Stud. 2023, 170, 102926. [Google Scholar] [CrossRef]
- Gao, P. Key technologies of human–computer interaction for immersive somatosensory interactive games using VR technology. Soft Comput. 2022, 26, 10947–10956. [Google Scholar] [CrossRef]
- Mellecker, R.; Lyons, E.J.; Baranowski, T. Disentangling fun and enjoyment in exergames using an expanded design, play, experience framework: A narrative review. Games Health Res. Dev. Clin. Appl. 2013, 2, 142–149. [Google Scholar] [CrossRef]
- Desrochers, M.N.; Pusateri, M.J., Jr.; Fink, H.C. Game assessment: Fun as well as effective. Assess. Eval. High. Educ. 2007, 32, 527–539. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Criteria | Description |
|---|---|
| Source website | Web of Science Core Collection |
| Years | January 1992–June 2024 |
| Search term | TS = “sense of agency” |
| Inclusion criteria | Articles, proceedings papers, review articles |
| Sample size | 2096 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Du, S.; Kurien, A.; van Wyk, B.J.; Liu, Q. The Sense of Agency in Human–Machine Interaction Systems. Appl. Sci. 2024, 14, 7327. https://doi.org/10.3390/app14167327
Yu H, Du S, Kurien A, van Wyk BJ, Liu Q. The Sense of Agency in Human–Machine Interaction Systems. Applied Sciences. 2024; 14(16):7327. https://doi.org/10.3390/app14167327
Chicago/Turabian StyleYu, Hui, Shengzhi Du, Anish Kurien, Barend Jacobus van Wyk, and Qingxue Liu. 2024. "The Sense of Agency in Human–Machine Interaction Systems" Applied Sciences 14, no. 16: 7327. https://doi.org/10.3390/app14167327
APA StyleYu, H., Du, S., Kurien, A., van Wyk, B. J., & Liu, Q. (2024). The Sense of Agency in Human–Machine Interaction Systems. Applied Sciences, 14(16), 7327. https://doi.org/10.3390/app14167327