
Assistance in Picking Up and Delivering Objects for Individuals with Reduced Mobility Using the TIAGo Robot

 , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Task and Materials
2.1.1. TIAGo
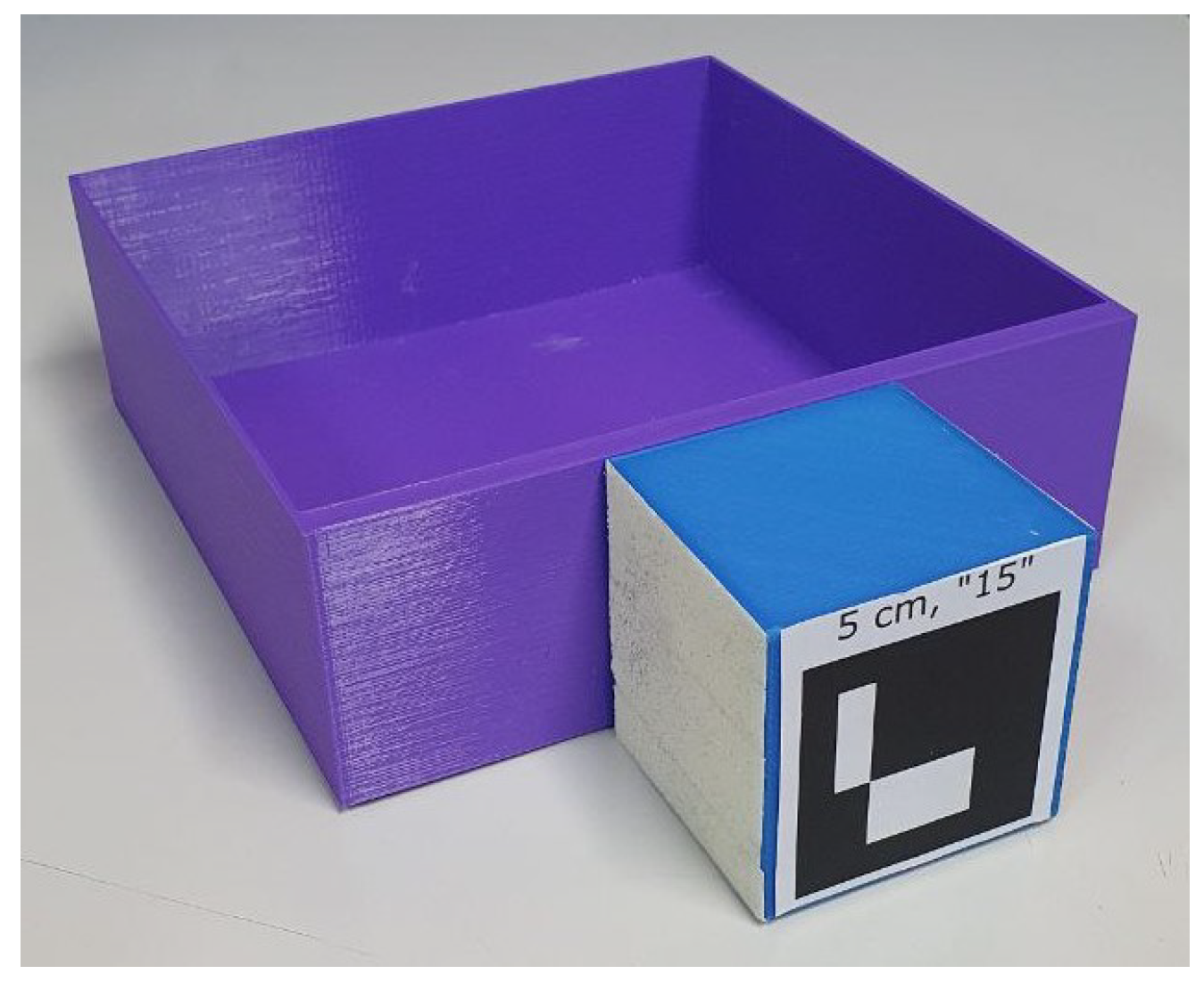
2.1.2. Containers for Objects
2.2. Implementation
2.2.1. Mid-Level Nodes
- Navigation node: The robot implements the ROS stack navigation (see http://wiki.ros.org/navigation, date accessed 4 June 2024) for autonomous navigation and it is leveraged for use in assistive tasks.For this purpose, a map of the environment has to be generated beforehand. Then, on this map, the points of interest (POIs) are saved in a list with an ID associated with them. POIs are those locations where containers can be found like the position of the robot in front of the table, and where the user can be found, which is the position in front of the bed. In this way, the coordinator or web app nodes will request this navigation node to move to a POI by providing its ID.
- Vision node: This node scans images to identify ArUco markers and calculate their 3D positions in space.This node constantly executes a loop, scanning RGB images from both cameras (head and gripper) by using the library aruco_ros (see https://wiki.ros.org/aruco_ros, date accessed 13 August 2024), which provides real-time marker-based 3D pose estimation. However, just the corner pixels will be used. When an ArUco marker is detected, the pixel centroid is computed and published along with its number ID by ROS topic. In addition, a modified image with the centroid, ID, and bounding box is plotted for visualization, like in the example from Figure 4.Regarding markers detected with the RGB-D camera on the head, their position in space can also be determined. For this purpose, the value of the depth image corresponding to the centroid pixel is used, and the coordinates are computed using the camera’s intrinsic parameters. This information is also published via ROS topics.
- Manipulation node: This node is composed of three sub-nodes to control the head, the gripper, and the arm–torso group, as previously shown in Figure 3.The head control enables the routine coordinator to request a specific point in space for the camera to focus on. This is achieved by calculating the values of the pan and tilt controllers based on the intrinsic parameters of the camera.The gripper control involves commanding the gripper controllers to either open to their maximum aperture or close until no further movement is achieved, indicating a grip.On the other hand, the MoveIt library [30] is used to control the arm–torso group. This allows us to plan safe trajectories that avoid self-collision and to define constraints or virtual obstacles.
- TTS node: This node is for the text-to-speech (TTS). Explanatory behavior is a crucial feature of a human assistive robot [31]. For this purpose, at the beginning of each routine or movement, the coordinator node requests advice through the TTS node on which the task or action is to be performed. This node also receives requests to ‘speak’ social expressions, e.g., salutations, when initiated.
- Diagnosis node: This node collects information about the robot’s state and publishes it to the web app for its display. This information includes the battery level, current state (stop or move), current sub-task (e.g., navigating), localization values, and actuator state (normal or overheat). In case an alert occurs, like a low battery level, this node commands the TTS to inform about the issue.
2.2.2. Routine for Picking a Container from the Table
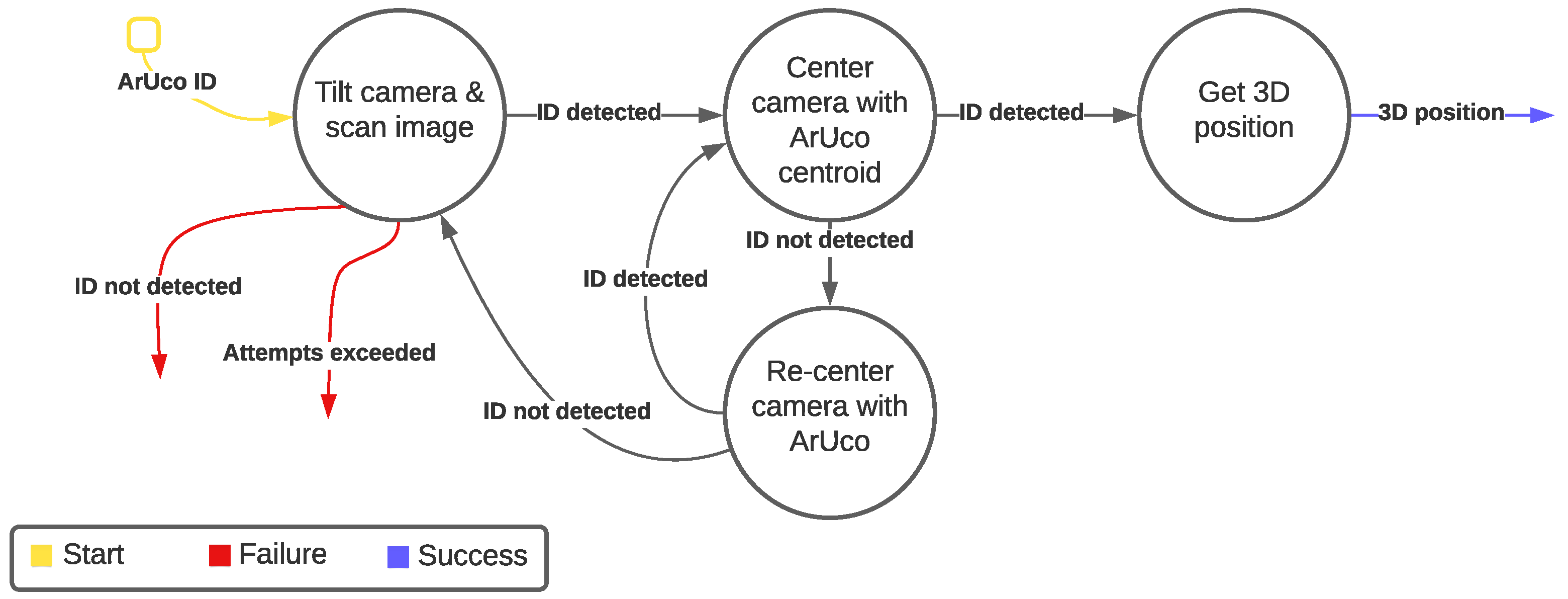
- Look for the container: The coordinator initiates the process by searching for the specified ArUco marker ID received by the user’s request. The process is represented by the finite state machine shown in Figure 7. It begins with a simultaneous tilt and scan of the camera using vision and head node services, which continue until the marker is detected. Once detected, the image is centered on the marker, and the coordinates are computed. If the marker is not found during centering, the head moves slightly to re-detect the marker, addressing any issues caused by delays or occlusions in the initial position computation.
- Correct base position: The optimal distance for container pick-up has been empirically determined to be between 0.8 and 0.9 m. Once the marker position is obtained, the base is moved until it falls within this range.
- Gripper centering: The marker position obtained may have some errors, which can cause the gripper to miss the container handle, resulting in a failed pick-up. To avoid this, the camera on the gripper is used. This process follows the finite state machine shown in Figure 8. Once the gripper is positioned in front of the marker, the end-effector moves along the Cartesian axis proportionally to the error between the detected centroid and the image center. If the marker is not detected, a spiral movement in that plane is executed to locate the marker. Once the image is centered, the pose of the end-effector provides a more accurate position of the marker in height and width. The distance to the marker is still obtained from the RGB-D camera.
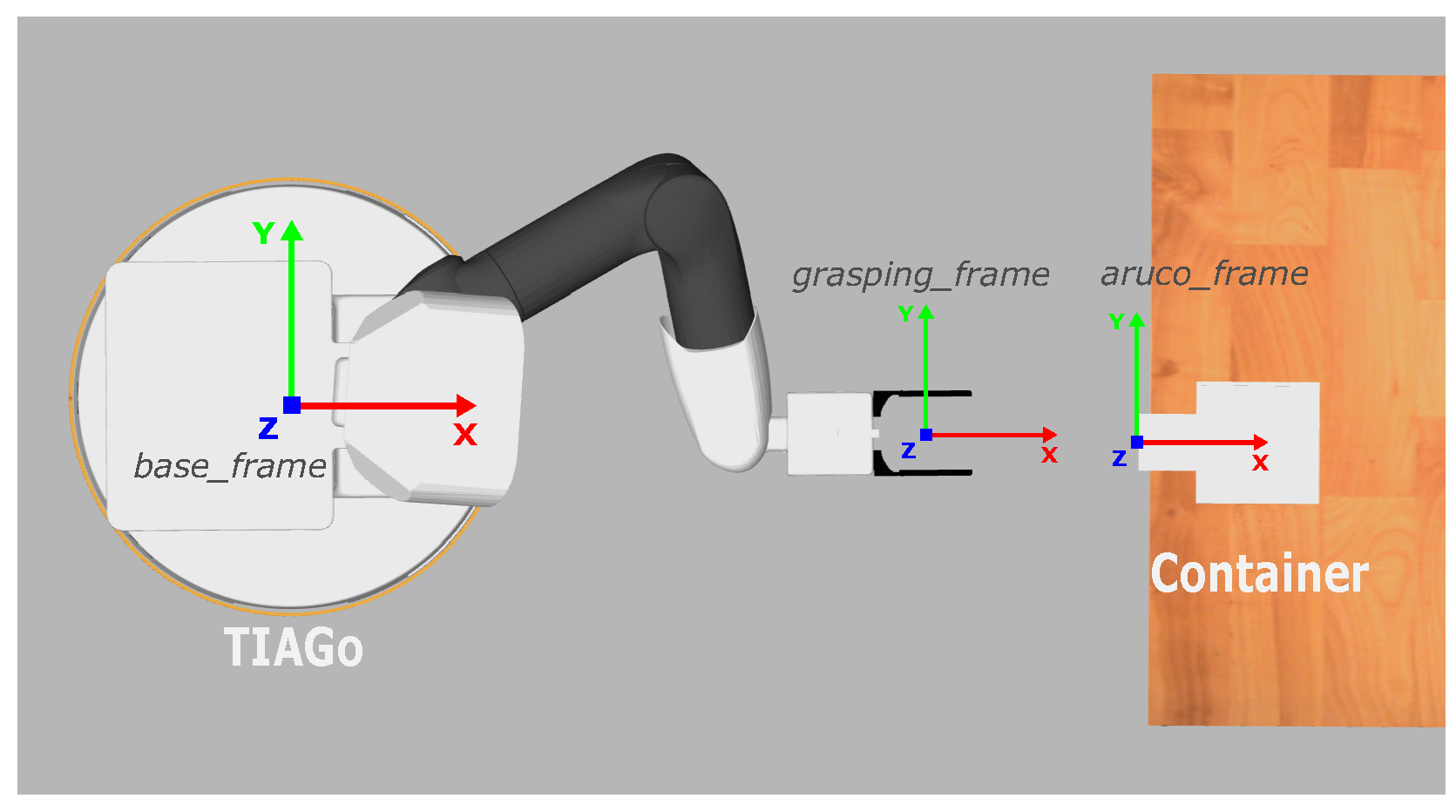
- Pick up the container: Once the pose of the container is determined, the pick-up process is executed. The goal in this step is to achieve the grasping position shown in the scheme of Figure 9. This involves moving the end-effector in front of the container handle with the gripper open. The end-effector then approaches the grasping frame to the determined ArUco position and closes the gripper. After securing the handle, the end-effector is elevated and retracted to a distance of 0.6 m from the base. The pick-up process concludes by moving the base backward 0.2 m.
2.2.3. Routine for Picking a Container from the Shelf
- Look for the container: This sub-process is the same as the one used for picking from the table and follows the finite state machine shown in Figure 7.
- Correct base position: Again, this sub-process is the same as the one implemented before.
- Gripper centering: This sub-process includes a modification. First, it moves backward 0.3 m to create space for raising the gripper to an elevated position. Then, the previously presented finite state machine from Figure 8 is executed. Once the more precise location of the container is obtained, the robot moves forward 0.3 m.
- Pick up the container: The ‘pick’ described before is executed by grabbing the container with the end-effector and then retreating from the shelf, as shown in Figure 11c.
- Post-pick: Finally, the end-effector is commanded to predefined intermediate safe poses between the high pose and the final retreated pose of Figure 11d. For this trajectory, a constraint of maintaining the orientation is set via MoveIt.
2.2.4. Routine for Picking a Container from the User
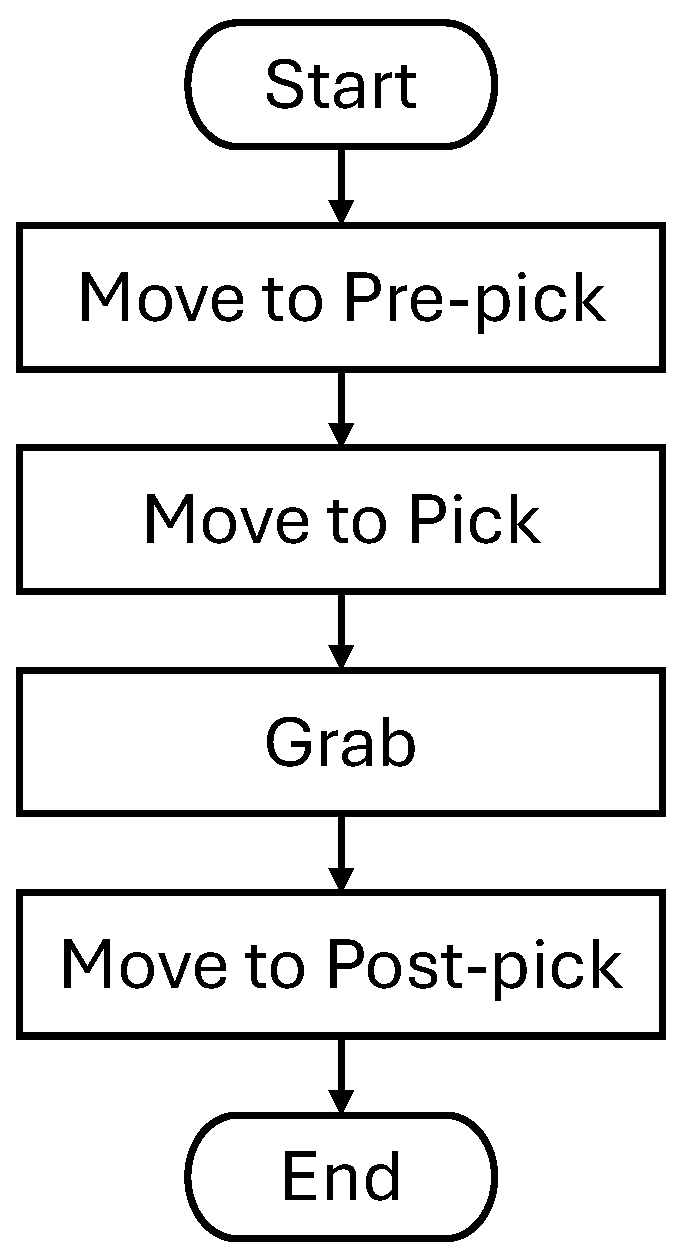
- Pre-pick: The routine begins by commanding the arm to a pre-defined configuration as shown in Figure 13a.
- Pick: The end-effector is commanded to move forward. An advisory speech message is issued to the user, instructing them to place the container handle between the finger grippers; after a brief wait, the grab is executed.
- Post-pick: The end-effector is retracted closer to the torso, thereby completing the routine.
2.2.5. Routine of Placing the Container on the Table
- Pre-place: The process starts with moving the end-effector over the designated position.
- Place: The end-effector is lowered to a position 1 cm above the known table height, and the gripper is opened.
- Post-place: Subsequently, the end-effector is raised and retracted, completing the sequence by moving the arm to its home configuration.
2.2.6. Routine of Deliver Container
- Navigate to the container: The routine starts with the robot navigating to the point where the user locates the container.
- Pick up the container: The point at which the container is located determines the routine that is executed. This is one of the previously presented routines, namely picking from a table or shelf, or picking from the user.
- Navigate to the delivery point: With the container securely held, the robot is commanded to navigate to a position near the delivery point. If the point is the bed, upon arrival, the robot notifies the user of its presence and the action it will perform (holding or dropping the container). Then, the robot navigates to the delivery point.
- Deliver container: If the delivery point is a table, the robot performs the previously described routine of placing the container. If the delivery point is to the user, the process is illustrated in Figure 17 and is as follows: The routine begins by moving the end-effector forward to the user. The robot then notifies the user of the action it will perform (either holding or dropping the container). It executes the action by either maintaining its grip or opening the gripper to release the container. After a brief wait, the end-effector is retracted to a distance of 0.6 m. If the action involves dropping the container, the arm is then commanded to return to its home position.
- Navigation to rest: Finally, the robot is commanded to navigate to a rest POI to finish and wait for another request.
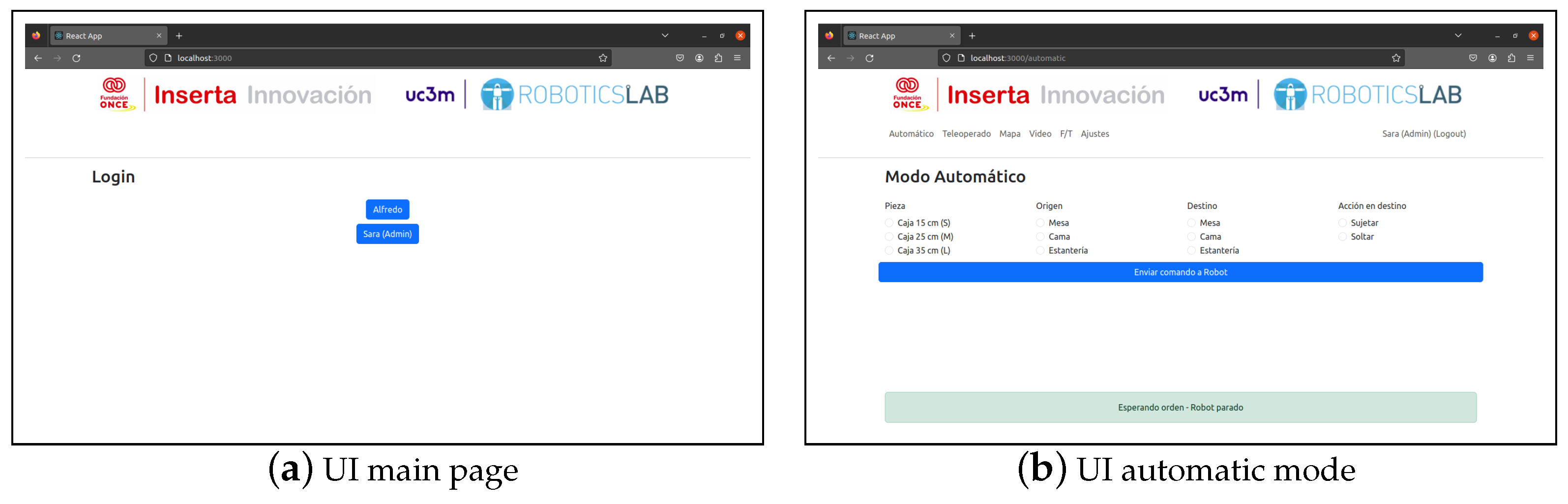
2.2.7. User Web App
3. Results
3.1. Execution Experiments
3.1.1. Experiments on Picking from Table
3.1.2. Experiments on Delivering
3.2. User Experiments
3.2.1. Methodology
- Pre-demo: The patients are introduced to the experimental setup and informed about the robot and its technical features, but not about the specific tasks and implementations it can perform, e.g., “the robot has a camera”. They are then asked about the potential for assistance.
- Post-demo: The patients act as users of the robot’s assistance and are asked to command the desired assistance routines from their own mobile phones. They are then surveyed about their satisfaction, the usefulness of the robot, the attractiveness of the user interface, and their future needs and suggestions for improvements.
3.2.2. Participant Demographics
3.2.3. Experiment Set-Up
3.2.4. Surveys Results
- In general, participants were satisfied and impressed with the potential, assistance demonstration, usability, and user interface, giving them high scores.
- Regarding the demo execution—although they found it useful, they found that it lacked speed execution. This is interesting because the movements of the robot were executed at this speed for safety as well as safety expectations.
- Regarding their needs after seeing the demo—they expressed a desire for the robot to pick up objects not only from the table and shelf but also from the floor and cupboard. They explained that they often dropped objects and needed assistance from a nurse to retrieve them. They also suggested that the robot should be able to pick up objects from the wardrobe because they needed to pick up clothes from there without help as well.
- Regarding the user interface (UI)—the majority of users were pleased. However, some noted the need for larger typography, while others suggested the inclusion of pictures to facilitate easier understanding.
4. Discussion
4.1. System Performance
4.2. User Acceptance and Interaction
4.3. Feedback and Future Developments
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ArUco | Augmented Reality University of Cordoba |
| FLM | Fundación de Lesionado Medular |
| ID | identification |
| POI | point of interest |
| ROS | robot operating system |
| TTS | text-to-speech |
| UI | user interface |
References
- Eckert, M.J.; Martin, M.J. Trauma: Spinal Cord Injury. Surg. Clin. N. Am. 2017, 97, 1031–1045. [Google Scholar] [CrossRef] [PubMed]
- Silva, N.A.; Sousa, N.; Reis, R.L.; Salgado, A.J. From basics to clinical: A comprehensive review on spinal cord injury. Prog. Neurobiol. 2014, 114, 25–57. [Google Scholar] [CrossRef] [PubMed]
- Purves, D.; Augustine, G.J.G.J.; Fitzpatrick, D.; Hall, W.C.W.C.; LaMantia, A.S.; Mooney, R.D.; Platt, M.L.; White, L.E.L.E.P.; Coquery, J.M.; Gailly, P.; et al. Neurosciences, 6th ed.; Sinauer Associate: Sunderland, MA, USA, 2019. [Google Scholar]
- Bemelmans, R.; Gelderblom, G.J.; Jonker, P.; de Witte, L. Socially Assistive Robots in Elderly Care: A Systematic Review into Effects and Effectiveness. J. Am. Med. Dir. Assoc. 2012, 13, 114–120.e1. [Google Scholar] [CrossRef] [PubMed]
- Salichs, M.A.; Castro-González, Á.; Salichs, E.; Fernández-Rodicio, E.; Maroto-Gómez, M.; Gamboa-Montero, J.J.; Marques-Villarroya, S.; Castillo, J.C.; Alonso-Martín, F.; Malfaz, M. Mini: A New Social Robot for the Elderly. Int. J. Soc. Robot. 2020, 12, 1231–1249. [Google Scholar] [CrossRef]
- Maroto-Gomez, M.; Carrasco-Martinez, S.; Marques-Villarroya, S.; Malfaz, M.; Castro-Gonzalez, A.; Salichs, M.A. Bio-inspired Cognitive Decision-making to Personalize the Interaction and the Selection of Exercises of Social Assistive Robots in Elderly Care. In Proceedings of the IEEE International Workshop on Robot and Human Communication RO-MAN, Busan, Republic of Korea, 28–31 August 2023; pp. 2380–2386. [Google Scholar] [CrossRef]
- Eirale, A.; Martini, M.; Tagliavini, L.; Gandini, D.; Chiaberge, M.; Quaglia, G. Marvin: An Innovative Omni-Directional Robotic Assistant for Domestic Environments. Sensors 2022, 22, 5261. [Google Scholar] [CrossRef] [PubMed]
- Gross, H.M.; Mueller, S.; Schroeter, C.; Volkhardt, M.; Scheidig, A.; Debes, K.; Richter, K.; Doering, N. Robot companion for domestic health assistance: Implementation, test and case study under everyday conditions in private apartments. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Hamburg, Germany, 28 September–2 October 2015; pp. 5992–5999. [Google Scholar] [CrossRef]
- Hall, A.K.; Backonja, U.; Painter, I.; Cakmak, M.; Sung, M.; Lau, T.; Thompson, H.J.; Demiris, G. Acceptance and perceived usefulness of robots to assist with activities of daily living and healthcare tasks. Assist. Technol. 2019, 31, 133–140. [Google Scholar] [CrossRef] [PubMed]
- Ghadage, D.; Bagde, R.; Jha, S.; Dhadi, M.; Barhate, C. A Review On Current Technological Advancements in Prosthetic Arms. In Proceedings of the ACCESS 2023—2023 3rd International Conference on Advances in Computing, Communication, Embedded and Secure Systems, Kalady, Ernakulam, India, 18–20 May 2023; pp. 328–333. [Google Scholar] [CrossRef]
- Huamanchahua, D.; Toledo-Garcia, P.; Aguirre, J.; Huacre, S. Hand Exoskeletons for Rehabilitation: A Systematic Review. In Proceedings of the 2022 IEEE International IOT, Electronics and Mechatronics Conference, IEMTRONICS 2022, Toronto, ON, Canada, 1–4 June 2022. [Google Scholar] [CrossRef]
- Aparna, R.P.; Iyer, V.; Dhivya, J. Advancing Exoskeleton Research: A Comprehensive Review. In Proceedings of the International Conference on Advancements in Electrical, Electronics, Communication, Computing and Automation, ICAECA 2023, Coimbatore, India, 16–17 June 2023. [Google Scholar] [CrossRef]
- Serrano, D.; Copaci, D.; Arias, J.; Moreno, L.E.; Blanco, D. SMA-Based Soft Exo-Glove. IEEE Robot. Autom. Lett. 2023, 8, 5448–5455. [Google Scholar] [CrossRef]
- Dragoi, M.; Mocanu, I.; Cramariuc, O. Object Manipulation for Assistive Robots. In Proceedings of the 2021 9th E-Health and Bioengineering Conference, EHB 2021, Iasi, Romania, 18–19 November 2021. [Google Scholar] [CrossRef]
- Kyrarini, M.; Zheng, Q.; Haseeb, M.A.; Graser, A. Robot learning of assistive manipulation tasks by demonstration via head gesture-based interface. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Toronto, ON, Canada, 24–28 June 2019; pp. 1139–1146. [Google Scholar] [CrossRef]
- Jardón Huete, A.J.; Victores, J.G.; Martínez, S.; Giménez, A.; Balaguer, C. Personal autonomy rehabilitation in home environments by a portable assistive robot. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 561–570. [Google Scholar] [CrossRef]
- Naranjo-Campos, F.J.; Matías-Martínez, A.D.; Victores, J.G.; Álvarez, N.; Alcaide, A.; Balaguer, C. Manipulación de objetos dirigida a la asistencia de personas con movilidad reducida [Object manipulation aimed at assisting people with reduced mobility]. In Proceedings of the XLIII Conference on Automation (Libro de Actas de las XLIII Jornadas de Automática), Logroño, Spain, 7–9 September 2022; pp. 798–803. [Google Scholar] [CrossRef]
- Garrote, L.; Paulo, J.; Perdiz, J.; Peixoto, P.; Nunes, U.J. Robot-Assisted Navigation for a Robotic Walker with Aided User Intent. In Proceedings of the RO-MAN 2018—27th IEEE International Symposium on Robot and Human Interactive Communication, Nanjing, China, 27–31 August 2018; pp. 348–355. [Google Scholar] [CrossRef]
- Lin, Z.; Luo, J.; Yang, C. A teleoperated shared control approach with haptic feedback for mobile assistive robot. In Proceedings of the ICAC 2019—2019 25th IEEE International Conference on Automation and Computing, Lancaster, UK, 5–7 September 2019. [Google Scholar] [CrossRef]
- Mohebbi, A. Human-Robot Interaction in Rehabilitation and Assistance: A Review. Curr. Robot. Rep. 2020, 1, 131–144. [Google Scholar] [CrossRef]
- Hsu, P.E.; Hsu, Y.L.; Chang, K.W.; Geiser, C. Mobility assistance design of the intelligent robotic wheelchair. Int. J. Adv. Robot. Syst. 2012, 9, 244. [Google Scholar] [CrossRef]
- Paulo, J.; Peixoto, P.; Nunes, U.J. ISR-AIWALKER: Robotic Walker for Intuitive and Safe Mobility Assistance and Gait Analysis. IEEE Trans.-Hum.-Mach. Syst. 2017, 47, 1110–1122. [Google Scholar] [CrossRef]
- Navarro, J.L.O. Interfaz de Teleoperación Para el Manipulador Móvil Manfred. 2015. Available online: https://e-archivo.uc3m.es/entities/publication/0e72adc4-9c81-4ae1-839a-c669276d7b52 (accessed on 10 August 2024).
- Islam, J.; Ghosh, A.; Iqbal, M.I.; Meem, S.; Ahmad, N. Integration of Home Assistance with a Gesture Controlled Robotic Arm. In Proceedings of the 2020 IEEE Region 10 Symposium, TENSYMP 2020, Dhaka, Bangladesh, 5–7 June 2020; pp. 266–270. [Google Scholar] [CrossRef]
- Calzada, A.; Łukawski, B.; Victores, J.G.; Balaguer, C. Teleoperation of the robot TIAGo with a 3D mouse controller. In Proceedings of the Symposium on Robotics, Bioengineering, and Computer Vision (Libro de Actas del Simposio de Robótica, Bioingeniería y Visión por Computador), Badajoz, Spain, 29–31 May 2024; pp. 133–138, ISBN 978-84-9127-262-5. [Google Scholar]
- Jardón Huete, A. Metodología de Diseño de Robots de Asistenciales. Aplicación al Robot Portátil ASIBOT [Methodology for the Design of Assistive Robots. Application to the Portable Robot ASIBOT]. Ph.D. Thesis, Universidad Carlos III de Madrid, Leganés, Spain, 2006. [Google Scholar]
- Miseikis, J.; Caroni, P.; Duchamp, P.; Gasser, A.; Marko, R.; Miseikiene, N.; Zwilling, F.; Castelbajac, C.D.; Eicher, L.; Fruh, M.; et al. Lio-A Personal Robot Assistant for Human-Robot Interaction and Care Applications. IEEE Robot. Autom. Lett. 2020, 5, 5339–5346. [Google Scholar] [CrossRef] [PubMed]
- Barber, R.; Ortiz, F.J.; Garrido, S.; Calatrava-Nicolás, F.M.; Mora, A.; Prados, A.; Vera-Repullo, J.A.; Roca-González, J.; Méndez, I.; Mozos, Ó.M. A Multirobot System in an Assisted Home Environment to Support the Elderly in Their Daily Lives. Sensors 2022, 22, 7983. [Google Scholar] [CrossRef] [PubMed]
- Garrido-Jurado, S.; Muñoz-Salinas, R.; Madrid-Cuevas, F.J.; Marín-Jiménez, M.J. Automatic generation and detection of highly reliable fiducial markers under occlusion. Pattern Recognit. 2014, 47, 2280–2292. [Google Scholar] [CrossRef]
- Chitta, S. Moveit!: An introduction; Springer: Berlin/Heidelberg, Germany, 2016; Volume 625, pp. 3–27. [Google Scholar] [CrossRef]
- Rubagotti, M.; Tusseyeva, I.; Baltabayeva, S.; Summers, D.; Sandygulova, A. Perceived safety in physical human–robot interaction—A survey. Robot. Auton. Syst. 2022, 151, 104047. [Google Scholar] [CrossRef]
- Bhattacharjee, T.; Gordon, E.K.; Scalise, R.; Cabrera, M.E.; Caspi, A.; Cakmak, M.; Srinivasa, S.S. Is more autonomy always better? Exploring preferences of users with mobility impairments in robot-assisted feeding. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Cambridge, UK, 23–26 March 2020; pp. 181–190. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (m) | (m) | (m) | (s) |
|---|---|---|---|
| Origin | Destination | (s) | (s) |
|---|---|---|---|
| table | user | 106.73 | 3.72 |
| shelf | user | 121.52 | 2.88 |
| user | table | 91.36 | 2.26 |
| User A | User B | User C | User D | User E | User F | Mean | |
|---|---|---|---|---|---|---|---|
| Potential (1–5) | 4.5 | 5 | 4 | 4 | 5 | 5 | 4.6 |
| Satisfaction (1–5) | 4 | 5 | 4 | 4 | 4 | 4 | 4.1 |
| Usefulness (1–5) | 4 | 5 | 4 | 3.5 | 4.5 | 5 | 4.3 |
| UI attractiveness (1–5) | 5 | 5 | 4 | 3 | 4 | 5 | 4.3 |
| Improvements | Faster execution, UI with larger typography, UI with pictures |
| Future needs | Voice control, picking up not only containers, opening a closet, picking up from the floor, tasks not only in the main room |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Naranjo-Campos, F.J.; De Matías-Martínez, A.; Victores, J.G.; Gutiérrez Dueñas, J.A.; Alcaide, A.; Balaguer, C. Assistance in Picking Up and Delivering Objects for Individuals with Reduced Mobility Using the TIAGo Robot. Appl. Sci. 2024, 14, 7536. https://doi.org/10.3390/app14177536
Naranjo-Campos FJ, De Matías-Martínez A, Victores JG, Gutiérrez Dueñas JA, Alcaide A, Balaguer C. Assistance in Picking Up and Delivering Objects for Individuals with Reduced Mobility Using the TIAGo Robot. Applied Sciences. 2024; 14(17):7536. https://doi.org/10.3390/app14177536
Chicago/Turabian StyleNaranjo-Campos, Francisco J., Ainhoa De Matías-Martínez, Juan G. Victores, José Antonio Gutiérrez Dueñas, Almudena Alcaide, and Carlos Balaguer. 2024. "Assistance in Picking Up and Delivering Objects for Individuals with Reduced Mobility Using the TIAGo Robot" Applied Sciences 14, no. 17: 7536. https://doi.org/10.3390/app14177536
APA StyleNaranjo-Campos, F. J., De Matías-Martínez, A., Victores, J. G., Gutiérrez Dueñas, J. A., Alcaide, A., & Balaguer, C. (2024). Assistance in Picking Up and Delivering Objects for Individuals with Reduced Mobility Using the TIAGo Robot. Applied Sciences, 14(17), 7536. https://doi.org/10.3390/app14177536