Deep Learning-Based Calculation Method for the Dry Beach Length in Tailing Ponds Using Satellite Images


Abstract
:1. Introduction
2. Research Framework
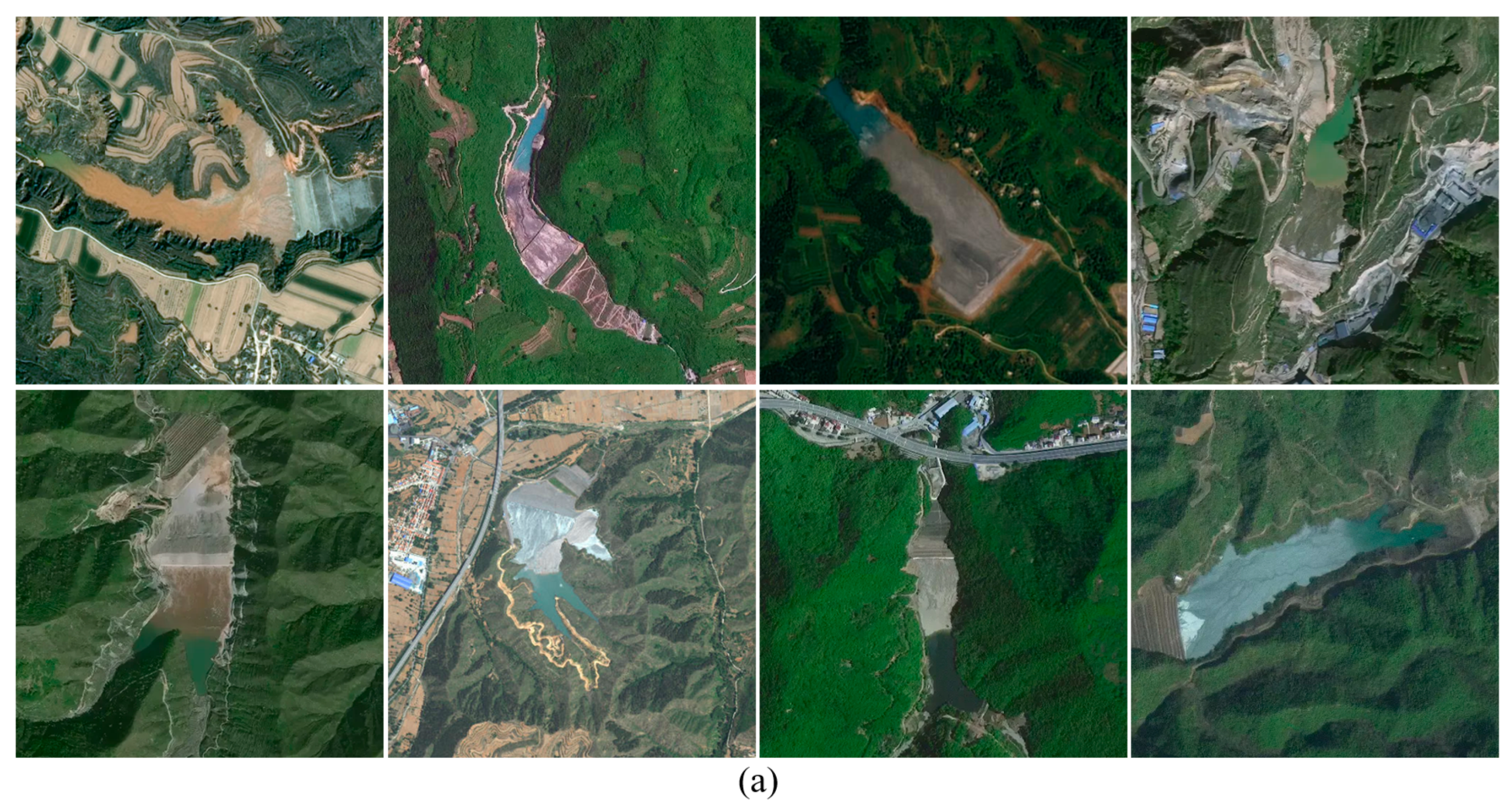
- Image acquisition involved checking public information on tailing ponds from emergency management department websites in different provinces and cities in China, pinpointing the exact locations using the Gaofen-7 satellite, and downloading satellite images of the tailing ponds. On the websites of emergency management departments in various provinces in China, information about tailings ponds in each province is publicly available, including their geographical location, level, and scale. After obtaining the geographic information of tailings ponds, we can search for their locations on a map.
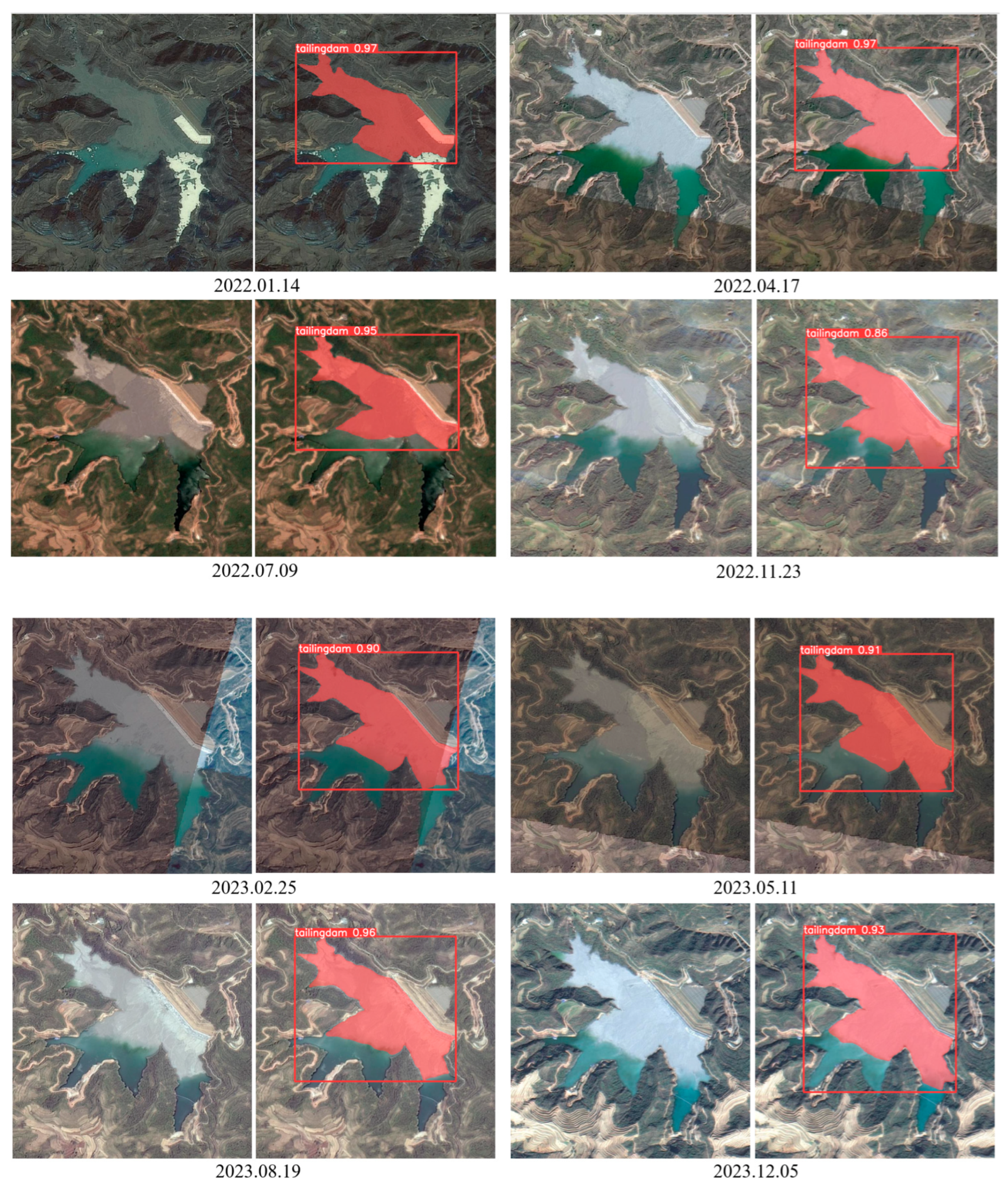
- Dry beach detection included creating a dataset of dry beach images of tailing ponds, labeling images with Labelme software (Version 5.4.1), and training the dataset using the YOLOv5-seg model. Labelme is an image annotation tool developed by the Computer Science and Artificial Intelligence Laboratory (CSAIL) of MIT. The source code of the software is open source and has been widely used in object detection semantic segmentation and instance segmentation [28].
- To calculate the length, the edge detection algorithm was used to extract points on the mask boundary of the dry beach area. Then, an equation was fitted to the beach crest line. Finally, a calculation model was created to determine the distance from the dry beach boundary to the beach crest line.
- A tailings pond in China was used to verify the method. The dry beach length was calculated and compared with the measured length of monitoring points on each site to verify the accuracy and practicality of the proposed method.
3. Materials and Methods
3.1. Data Acquisition
3.2. Detection of Dry Beach Area of Tailing Ponds
3.2.1. YOLOv5-Seg
3.2.2. Experimental Conditions and Parameter Settings
3.2.3. Model Performance Evaluation Index
3.2.4. Model Training and Verification Results
3.2.5. Edge Detection
- (1)
- Noise reduction. There are noises in the image, which may affect the accuracy of edge detection, so the image needs to be denoised first. The common denoising method is to use Gaussian filtering, which convolves the image with the Gaussian filter to reduce noise in the image. Gaussian filter is a commonly used image processing filter based on Gaussian functions. The Gaussian distribution function is shown in Equation (5):where σ denotes the parameters of the Gaussian filter. The original image I(x,y) is convolutionally smoothed with the Gaussian distribution function S(x,y) to obtain the image H(x,y). H(x,y) is shown in Equation (6):
- (2)
- Calculation of image gradient amplitude and direction. Image gradient amplitude can show the change in image pixels, and the gradient direction represents the change in the direction of image pixel intensity. The partial derivatives Wx (i, j) and WY (i, j) of pixel points (i, j) in the X and Y directions are shown in Formula (7) and Formula (8), respectively:At this time, the gradient amplitude w(I, J) and gradient direction at the pixel point θ(I, J) as shown in Formulas (9) and (10):
- (3)
- Non-maximum suppression. The operation process of non-maximum suppression is to first determine the non-zero point of the gradient direction and then find two adjacent points along the directional derivative of the point. If the amplitude of two adjacent points exceeds the center point, then this non-zero point does not belong to the image edge, and its edge intensity is set to zero.
- (4)
- Dual threshold selection and edge connection. By setting high and low thresholds, the real and false edges of the image can be effectively distinguished, and finally only the real and useful edge information is retained, which can successfully suppress the existence of pseudo-edge.
3.2.6. Fitting of Beach Crest Line
3.2.7. Length Calculation
4. Case Study
4.1. Identification Results of Dry Beach Area
4.2. Calculation of Dry Beach Length
4.3. Analysis of Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bebbington, A.J.; Humphreys Bebbington, D.; Sauls, L.A.; Rogan, J.; Agrawal, S.; Gamboa, C.; Imhof, A.; Johnson, K.; Rosa, H.; Royo, A.; et al. Resource Extraction and Infrastructure Threaten Forest Cover and Community Rights. Proc. Natl. Acad. Sci. USA 2018, 115, 13164–13173. [Google Scholar] [CrossRef]
- Azam, S.; Li, Q. Tailings Dam Failures: A Review of the Last One Hundred Years. Geotech. News 2010, 28, 50–54. [Google Scholar]
- Zhou, H.M.; Liu, X.F. Comparing Analysis on the Way of Tailings Disposal in China and Australia. Adv. Mater. Res. 2014, 878, 206–212. [Google Scholar] [CrossRef]
- Lyu, Z.; Chai, J.; Xu, Z.; Qin, Y.; Cao, J. A Comprehensive Review on Reasons for Tailings Dam Failures Based on Case History. Adv. Civ. Eng. 2019, 2019, 4159306. [Google Scholar] [CrossRef]
- Rico, M.; Benito, G.; Salgueiro, A.R.; Díez-Herrero, A.; Pereira, H.G. Reported tailings dam failures: A review of the European incidents in the worldwide context. J. Hazard. Mater. 2008, 152, 846–852. [Google Scholar] [CrossRef]
- Kemp, D.; Owen, J.R.; Lèbre, É. Tailings Facility Failures in the Global Mining Industry: Will a ‘Transparency Turn’ Drive Change? Bus. Strategy Environ. 2021, 30, 122–134. [Google Scholar] [CrossRef]
- Owen, J.R.; Kemp, D.; Lèbre, É.; Svobodova, K.; Pérez Murillo, G. Catastrophic Tailings Dam Failures and Disaster Risk Disclosure. Int. J. Disaster Risk Reduct. 2020, 42, 101361. [Google Scholar] [CrossRef]
- Piciullo, L.; Storrøsten, E.B.; Liu, Z.; Nadim, F.; Lacasse, S. A New Look at the Statistics of Tailings Dam Failures. Eng. Geol. 2022, 303, 106657. [Google Scholar] [CrossRef]
- Stark, T.D.; Moya, L.; Lin, J. Rates and Causes of Tailings Dam Failures. Adv. Civ. Eng. 2022, 2022, 7895880. [Google Scholar] [CrossRef]
- Hatje, V.; Pedreira, R.M.A.; De Rezende, C.E.; Schettini, C.A.F.; De Souza, G.C.; Marin, D.C.; Hackspacher, P.C. The Environmental Impacts of One of the Largest Tailing Dam Failures Worldwide. Sci. Rep. 2017, 7, 10706. [Google Scholar] [CrossRef]
- Williams, D.J. Lessons from Tailings Dam Failures—Where to Go from Here? Minerals 2021, 11, 853. [Google Scholar] [CrossRef]
- Lin, S.-Q.; Wang, G.-J.; Liu, W.-L.; Zhao, B.; Shen, Y.-M.; Wang, M.-L.; Li, X.-S. Regional Distribution and Causes of Global Mine Tailings Dam Failures. Metals 2022, 12, 905. [Google Scholar] [CrossRef]
- Mendes, R.G.; Do Valle Junior, R.F.; De Melo Silva, M.M.A.P.; De Morais Fernandes, G.H.; Fernandes, L.F.S.; Pissarra, T.C.T.; De Melo, M.C.; Valera, C.A.; Pacheco, F.A.L. Scenarios of Environmental Deterioration in the Paraopeba River, in the Three Years after the Breach of B1 Tailings Dam in Brumadinho (Minas Gerais, Brazil). Sci. Total Environ. 2023, 891, 164426. [Google Scholar] [CrossRef]
- Fernandes, G.W.; Goulart, F.F.; Ranieri, B.D.; Coelho, M.S.; Dales, K.; Boesche, N.; Bustamante, M.; Carvalho, F.A.; Carvalho, D.C.; Dirzo, R.; et al. Deep into the Mud: Ecological and Socio-Economic Impacts of the Dam Breach in Mariana, Brazil. Nat. Conserv. 2016, 14, 35–45. [Google Scholar] [CrossRef]
- Wu, M.; Ye, Y.; Hu, N.; Wang, Q.; Tan, W. Scientometric Analysis on the Review Research Evolution of Tailings Dam Failure Disasters. Environ. Sci. Pollut. Res. 2022, 30, 13945–13959. [Google Scholar] [CrossRef]
- Wu, X. Image Extraction of Tailings Pond Guided by Artificial Intelligence Support Vector Machine. Wirel. Commun. Mob. Comput. 2022, 2022, 9406930. [Google Scholar] [CrossRef]
- Li, Q.; Duan, Z.; Shi, H.; Yu, Y.; Zhang, H.; Fu, B. Development of a full-scale flume test system for depositional behavior study of segregating tailings. Bull. Eng. Geol. Environ. 2024, 83, 66. [Google Scholar] [CrossRef]
- Petkovsek, G.; Hassan, M.; Lumbroso, D.; Collell, M.R. A Two-Fluid Simulation of Tailings Dam Breaching. Mine Water Environ. 2021, 40, 151–165. [Google Scholar] [CrossRef]
- Zhou, L.; Xie, L.; Zheng, S. Automated Monitoring System for Tailings Pond Dry Beach. CN201237502, 13 May 2009. [Google Scholar]
- Le, K.; Yan, X.; Chen, C. A Device and Method for Measuring the Slope and Length of Dry Beaches. CN101865684B, 23 May 2012. [Google Scholar]
- Liu, Y.; Zhao, H.; Pu, H.; Li, X. A Dry Beach Length Measurement Device and Its Measurement Method. CN104713521A, 17 June 2015. [Google Scholar]
- Adil, E.; Mikou, M.; Mouhsen, A. A novel algorithm for distance measurement using stereo camera. CAAI. Trans. Intell. Technol. 2022, 7, 177–186. [Google Scholar] [CrossRef]
- Sadreddini, Z.; Çavdar, T.; Jond, H.B. A distance measurement method using single camera for indoor environments. In Proceedings of the 2016 39th International Conference on Telecommunications and Signal Processing (TSP), Vienna, Austria, 27–29 June 2016; pp. 462–465. [Google Scholar]
- Hu, J.; Hu, S.; Kang, F.; Zhang, J. Real-Time Dry Beach Length Monitoring for Tailings Dams Based on Visual Measurement. Math. Probl. Eng. 2013, 2013, 935371. [Google Scholar] [CrossRef]
- Huang, Q.; Li, Q.; Wang, Y.; Zhang, J. Dry Beach of Tailings Dam Length Measurement Based on Waterline Recognition. In Proceedings of the 2015 IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 19–20 December 2015; IEEE: Chongqing, China, 2015; pp. 503–507. [Google Scholar] [CrossRef]
- Yang, J.; Sun, Y.; Li, Q.; Qian, Z. Measure Dry Beach Length of Tailings Pond Using Deep Learning Algorithm. In Proceedings of the 2019 International Conference on Robotics, Intelligent Control and Artificial Intelligence, Shanghai, China, 20–22 September 2019; ACM: Shanghai, China, 2019; pp. 503–508. [Google Scholar] [CrossRef]
- Tauro, F.; Olivieri, G.; Petroselli, A.; Porfiri, M.; Grimaldi, S. Flow monitoring with a camera: A case study on a flood event in the tiber river. Environ. Monit. Assess. 2016, 188, 118. [Google Scholar] [CrossRef]
- Torralba, A.; Russell, B.C.; Yuen, J. LabelMe: Online image annotation and applications. Proc. IEEE 2010, 98, 1467–1484. [Google Scholar] [CrossRef]
- Xie, J.; Huang, G.; Liu, R.; Zhao, C.; Dai, J.; Jin, T.; Mo, F.; Zhen, Y.; Xi, S.; Tang, H.; et al. Design and Data Processing of China’s First Spaceborne Laser Altimeter System for Earth Observation: GaoFen-7. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 1034–1044. [Google Scholar] [CrossRef]
- Li, G.; Tang, X. Accuracy evaluation of large lake water level measurement based on GF-7 laser altimetry data. Natl. Remote Sens. Bull. 2022, 26, 138–147. [Google Scholar] [CrossRef]
- Mofid, N.; Bayrooti, J.; Ravi, S. Keep your AI-es on the road: Tackling distracted driver detection with convolutional neural networks and targeted data augmentation. arXiv 2020, arXiv:2006.10955. [Google Scholar]
- Yoo, J.; Kang, S. Class-Adaptive Data Augmentation for Image Classification. IEEE Access 2023, 11, 26393–26402. [Google Scholar] [CrossRef]
- Nguyen, Q.H.; Ly, H.-B.; Ho, L.S.; Al-Ansari, N.; Le, H.V.; Tran, V.Q.; Prakash, I.; Pham, B.T. Influence of Data Splitting on Performance of Machine Learning Models in Prediction of Shear Strength of Soil. Math. Probl. Eng. 2021, 2021, 4832864. [Google Scholar] [CrossRef]
- Lobo, V.G.R.; Fonseca, T.C.O.; Moura, F.A.S. Bayesian Cross-Validation of Geostatistical Models. Spat. Stat. 2020, 35, 100394. [Google Scholar] [CrossRef]
- Sampurno, R.M.; Liu, Z.; Abeyrathna, R.M.; Ahamed, T. Intrarow Uncut Weed Detection Using You-Only-Look-Once Instance Segmentation for Orchard Plantations. Sensors 2024, 24, 893. [Google Scholar] [CrossRef]
- Zhang, J.; Liang, H.; Tong, S.; Zhou, Y.; Kan, J. An Advanced Software Platform and Algorithmic Framework for Mobile DBH Data Acquisition. Forests 2023, 14, 2334. [Google Scholar] [CrossRef]
- Rong, T.; Wang, C.; Luo, Q.; Li, Y. Underwater shipwreck target detection based on audio-visual heterogeneous data. In Proceedings of the OCEANS 2023—Limerick, Limerick, Ireland, 5–8 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Niu, K.; Wang, C.; Xu, J.; Yang, C.; Zhou, X.; Yang, X. An Improved YOLOv5s-Seg Detection and Segmentation Model for the Accurate Identification of Forest Fires Based on UAV Infrared Image. Remote Sens. 2023, 15, 4694. [Google Scholar] [CrossRef]
- Elfwing, S.; Uchibe, E.; Doya, K. Sigmoid-weighted linear units for neural network function approximation in reinforcement learning. Neural Netw. 2018, 107, 3–11. [Google Scholar] [CrossRef]
- Hu, J.; Li, G.; Mo, H.; Lv, Y.; Qian, T.; Chen, M.; Lu, S. Crop Node Detection and Internode Length Estimation Using an Improved YOLOv5 Model. Agriculture 2023, 13, 473. [Google Scholar] [CrossRef]
- Flores-Calero, M.; Astudillo, C.A.; Guevara, D.; Maza, J.; Lita, B.S.; Defaz, B.; Ante, J.S.; Zabala-Blanco, D.; Armingol Moreno, J.M. Traffic Sign Detection and Recognition Using YOLO Object Detection Algorithm: A Systematic Review. Mathematics 2024, 12, 297. [Google Scholar] [CrossRef]
- Gong, H.; Mu, T.; Li, Q.; Dai, H.; Li, C.; He, Z.; Wang, W.; Han, F.; Tuniyazi, A.; Li, H.; et al. Swin-Transformer-Enabled YOLOv5 with Attention Mechanism for Small Object Detection on Satellite Images. Remote Sens. 2022, 14, 2861. [Google Scholar] [CrossRef]
- Lee, S.; Lee, J.; Moon, H.; Park, C.; Seo, J.; Eo, S.; Koo, S.; Lim, H. A Survey on Evaluation Metrics for Machine Translation. Mathematics 2023, 11, 1006. [Google Scholar] [CrossRef]
- Everingham, M.; Eslami, S.M.A.; Van Gool, L.; Williams, C.K.I.; Winn, J.; Zisserman, A. The Pascal Visual Object Classes Challenge: A Retrospective. Int. J. Comput. Vis. 2015, 111, 98–136. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, C.; Feng, Y.; Li, D. Pests Identification of IP102 by YOLOv5 Embedded with the Novel Lightweight Module. Agronomy 2023, 13, 1583. [Google Scholar] [CrossRef]
- Jiang, X.; Xu, S.; Wu, J.; Zhou, C.; Ji, S. Boosting Noise Reduction Effect via Unsupervised Fine-Tuning Strategy. Appl. Sci. 2024, 14, 1742. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Details |
|---|---|
| CPU | Intel Core i7-13700H (Intel, Santa Clara, CA, USA) |
| GPU | NVIDIA GeForce RTX 4060 (NVIDIA, Santa Clara, CA, USA) |
| Memory | 32G |
| Image size | 640 × 640 |
| Batch size | 16 |
| Learning rate | 0.01 |
| Epoch | 200 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, Z.; Tian, Y.; Li, Q.; Liu, G.; Cui, X.; Zhang, S. Deep Learning-Based Calculation Method for the Dry Beach Length in Tailing Ponds Using Satellite Images. Appl. Sci. 2024, 14, 7560. https://doi.org/10.3390/app14177560
Duan Z, Tian Y, Li Q, Liu G, Cui X, Zhang S. Deep Learning-Based Calculation Method for the Dry Beach Length in Tailing Ponds Using Satellite Images. Applied Sciences. 2024; 14(17):7560. https://doi.org/10.3390/app14177560
Chicago/Turabian StyleDuan, Zhijie, Yu Tian, Quanming Li, Guangyu Liu, Xuan Cui, and Shumao Zhang. 2024. "Deep Learning-Based Calculation Method for the Dry Beach Length in Tailing Ponds Using Satellite Images" Applied Sciences 14, no. 17: 7560. https://doi.org/10.3390/app14177560