
Comparative Study of a Buck DC-DC Converter Controlled by the MPPT (P&O) Algorithm without or with Fuzzy Logic Controller




Abstract
1. Introduction
- -
- STEP-DOWN converters or serial converters (BUCK converters), where the output voltage is lower than the input voltage or at most equal;
- -
- STEP-UP converters or parallel converters (BOOST converters), where the output voltage is higher or at least equal to the input voltage;
- -
- STEP—DOWN/UP converters or series-parallel converters (BUCK–BOOST converters), where the output voltage can be lower or higher than the input voltage;
- -
- CUK converters—hybrid converters of boost and buck converters;
- -
- Bridge-type converters.
1.1. Literature Review
1.2. Contributions to the Work Achievement
2. Materials and Methods
2.1. Design Elements of the Step-Down Converter
2.1.1. Calculation of the Filtering Inductance
2.1.2. Condenser Calculation
2.1.3. Calculation of Load Resistance
2.2. Elaborating the Models in MATLAB-Simulink DC-DC Buck Converter
2.2.1. Control Algorithms of the DC-DC Converters for Following Up the Maximum Power Point
2.2.2. Perturb and Observe (P&O) Algorithm
- (), at the maximum power point MPP;
- (), on the left side of the maximum power point MPP;
- (), on the right side of the maximum power point MPP.
2.2.3. Incremental Conductance Algorithm
2.3. Design of the Fuzzy Logic Controller
- (1)
- If (E(K) is NM) and (dE(k) is NB), then (u(k) is ZE);
- (2)
- If (E(K) is PB) and (dE(k) is NS), then (u(k) is PB).
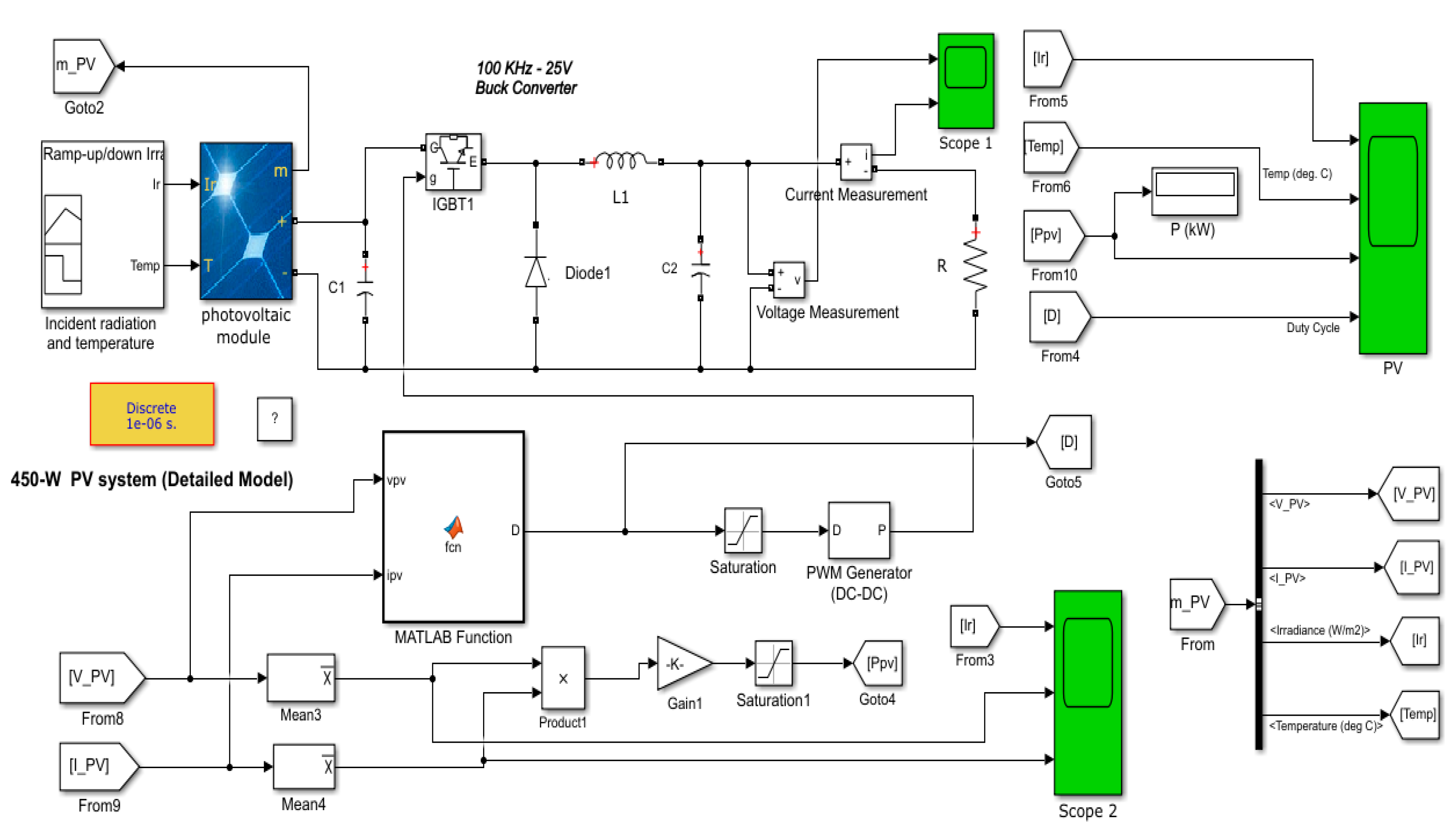
2.4. Model in MATLAB-Simulink of the Buck DC-DC Converter Controlled through the Perturb and Observe (P&O) Algorithm without a Fuzzy Logic Controller
2.5. Model in MATLAB-Simulink of the Buck DC-DC Converter Controlled through the Perturb and Observe (P&O) Algorithm with a Fuzzy Logic Controller
3. Simulation Results
Comparative Study between the Simulation Results Obtained through the Two Methods
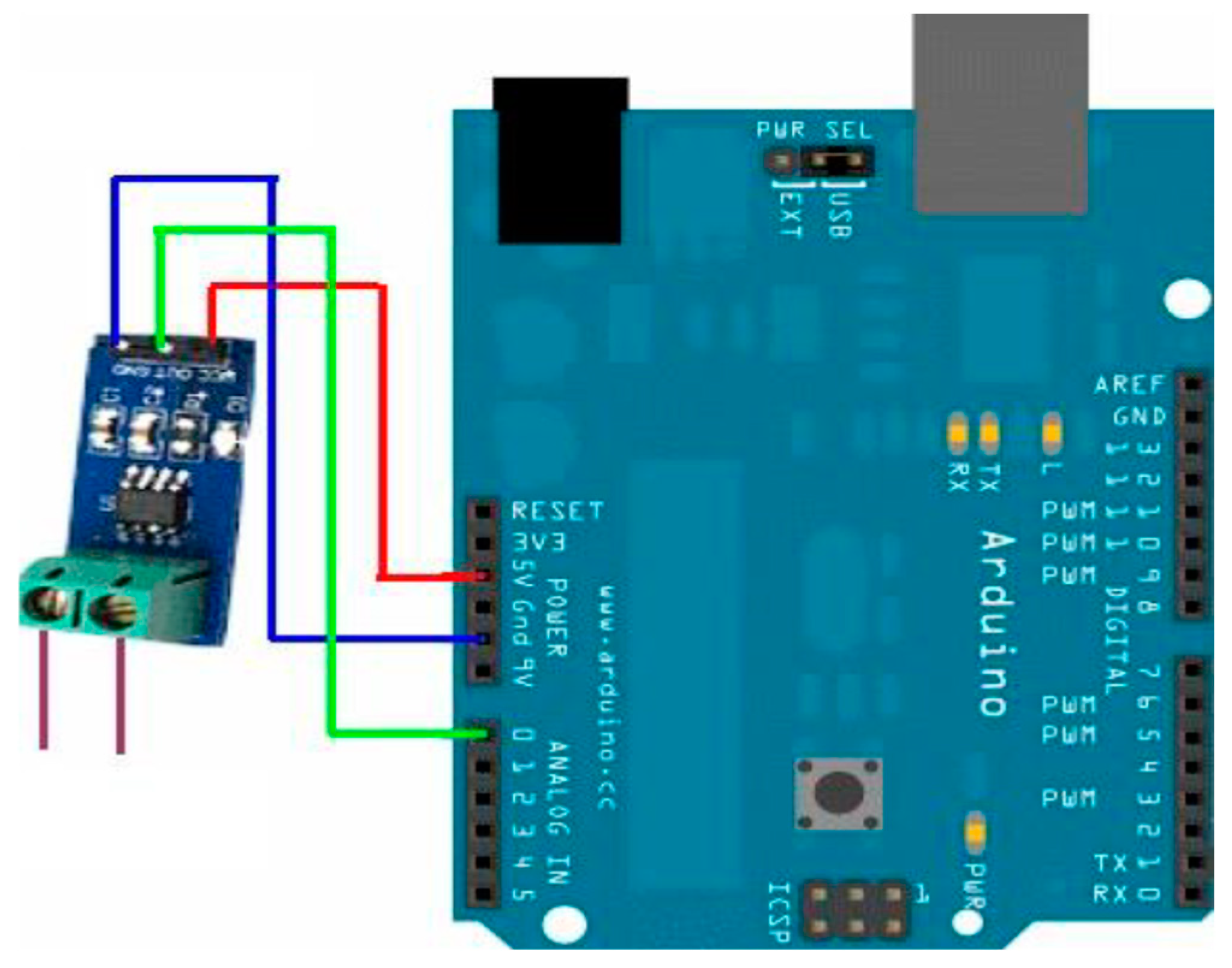
4. Construction of the DC-DC Buck-Type Converter Controlled through the Development Board Arduino Uno
5. Conclusions and Perspectives
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rebhi, M.; Benatillah, A.; Sellam, M.; Kadri, B. Comparative Study of MPPT Controllers for PV System Implemented in the South-west of Algeria. Energy Procedia 2013, 36, 142–153. [Google Scholar] [CrossRef]
- Boubii, C.; El Kafazi, I.; Bannari, R.; El Bhiri, B. A comparative study between optimization algorithms of MPPT algorithms (P&O and incremental conductance method). In Proceedings of the International Conference on Digital Technologies and Applications 2023, Fez, Morocco, 29 April 2023. [Google Scholar] [CrossRef]
- Ba, A.; Ehssein, C.O.; Mahmoud, M.E.M.O.M.; Hamdoun, O.; Elhassen, A. Comparative Study of Different DC/DC Power Converter for Optimal PV System Using MPPT (P&O) Method. Appl. Sol. Energy 2018, 54, 235–245. [Google Scholar] [CrossRef]
- Meryem, B.; Ahmed, N.; Ahmed, F. Photovoltaic Power Control Using Fuzzy Logic and Fuzzy Logic Type 2 MPPT Algorithms and Buck Converter. Available online: https://core.ac.uk/download/pdf/228834734.pdf (accessed on 17 July 2024).
- Balta, G.; Altin, N.; Nasiri, A. Interval Type-2 Fuzzy-Logic-Based Constant Switching Frequency Control of a Sliding-Mode-Controlled DC–DC Boost Converter. Appl. Sci. 2023, 13, 3239. [Google Scholar] [CrossRef]
- Agoub, R.A.A.; Hançerlioğullari, A.; Rahebi, J.; Lopez-Guede, J.M. Battery Charge Control in Solar Photovoltaic Systems Based on Fuzzy Logic and Jellyfish Optimization Algorithm. Appl. Sci. 2023, 13, 11409. [Google Scholar] [CrossRef]
- Baždarić, R.; Ćelić, J.; Vončina, D. Compensation of the Current Imbalance of an Interleaved DC–DC Buck Converter, Sensorless Online Solution Based on Offline Fuzzy Identification and Post-Linearization. Energies 2023, 16, 4836. [Google Scholar] [CrossRef]
- Narwat, L.K.; Dhillon, J. Design and Operation of Fuzzy Logic Based MPPT Controller under Uncertain Condition. J. Phys. Conf. Ser. 2021, 1854, 012035. [Google Scholar] [CrossRef]
- Tatar, K.; Chudzik, P.; Leśniewski, P. Sliding Mode Control of Buck DC–DC Converter with LC Input Filter. Energies 2023, 16, 6983. [Google Scholar] [CrossRef]
- Monsalve-Rueda, M.; Candelo-Becerra, J.E.; Hoyos, F.E. A Comparative Study between MPC Algorithm and P&O and IncCond the Optimization Algorithms of MPPT Algorithms. Energies 2024, 17, 2701. [Google Scholar] [CrossRef]
- Li, X.; He, Y.; Li, M. Research on Photovoltaic Maximum Power Point Tracking Control Based on Improved Tuna Swarm Algorithm and Adaptive Perturbation Observation Method. Energies 2024, 17, 2985. [Google Scholar] [CrossRef]
- Cai, Z.; Tang, Y.; Guo, W.; Chen, T.; Zheng, H.; Qin, T. Energy Management Strategy for Distributed Photovoltaic 5G Base Station DC Microgrid Integrated with the CF-P&O-INC MPPT Algorithm. Energies 2024, 17, 3258. [Google Scholar] [CrossRef]
- Almousa, M.T.; Gomaa, M.R.; Ghasemi, M.; Louzazni, M. Single-Sensor Global MPPT for PV System Interconnected with DC Link Using Recent Red-Tailed Hawk Algorithm. Energies 2024, 17, 3391. [Google Scholar] [CrossRef]
- Rezk, H.; Aly, M.; Ghoniem, R.M. Robust Fuzzy Logic MPPT Using Gradient-Based Optimization for PEMFC Power System. Sustainability 2023, 15, 13368. [Google Scholar] [CrossRef]
- Khan, M.U.; Murtaza, A.F.; Noman, A.M.; Sher, H.A.; Zafar, M. State-Space Modeling, Design, and Analysis of the dc-dc Converters for PV Application: A Review. Sustainability 2024, 16, 202. [Google Scholar] [CrossRef]
- Subbulakshmy, R.; Palanisamy, R.; Alshahrani, S.; Saleel, C.A. Implementation of Non-Isolated High Gain Interleaved DC-DC Converter for Fuel Cell Electric Vehicle Using ANN-Based MPPT Controller. Sustainability 2024, 16, 1335. [Google Scholar] [CrossRef]
- El Abbadi, R.; Aatabe, M.; Bouzid, A.E.M. Wireless Diagnosis and Control of DC–DC Converter for Off-Grid Photovoltaic Systems. Sustainability 2024, 16, 3252. [Google Scholar] [CrossRef]
- Yilmaz, M. Comparative Analysis of Hybrid Maximum Power Point Tracking Algorithms Using Voltage Scanning and Perturb and Observe Methods for Photovoltaic Systems under Partial Shading Conditions. Sustainability 2024, 16, 4199. [Google Scholar] [CrossRef]
- Banu, I.V.; Beniugă, R.; Istrate, M. Comparative Analysis of the Perturb-and-Observe and Incremental Conductance MPPT Methods. In Proceedings of the 8th International Symposium on Advanced Topics in Electrical Engineering, Bucharest, Romania, 23–25 May 2013. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of Photovoltaic Array Maximum Power Point Tracking Techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Yadav, A.P.; Thirumaliah, S.; Haritha, G.; Scholar, P.G. Comparison of MPPT Algorithms for DC-DC Converters Based PV Systems. Int. J. Adv. Res. Electr. Electron. Instrum. Eng. 2012, 1, 18–23. [Google Scholar]
- Boubaker, O. MPPT techniques for photovoltaic systems: A systematic review in current trends and recent advances in artificial intelligence. Discov. Energy 2023, 3, 9. [Google Scholar] [CrossRef]
- Rekioua, D.; Matagne, E. Optimization of Photovoltaic Power Systems, Modelization, Simulation and Control; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Sofron, E.; Bizon, N.; Ionita, S.; Raducu, R. Sisteme de Control Fuzzy—Modelare si Proiectare Asistate de Calculator. Available online: https://igsbiera.ebibliophil.ro/mon/sisteme-de-control-fuzzy-modelare-si-proiectare-asistate-de-calculator-tehnologii-avansate-h29yrjz4 (accessed on 26 February 2021).
- Available online: https://www.wardsci.com/store/product/23748699/arduino-uno-development-board (accessed on 17 July 2024).
- Ismailov, A.S.; Jo‘Rayev, Z.B. Study of arduino microcontroller board. Sci. Educ. Sci. J. 2022, 3, 172–179. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| dE(k) | ||||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZE | PS | PM | PB | ||
| E(k) | NB | ZE | ZE | ZE | NB | NB | NB | NB |
| NM | ZE | ZE | ZE | NM | NM | NM | NM | |
| NS | NS | ZE | ZE | NS | NS | NS | NS | |
| ZE | NM | NS | ZE | ZE | ZE | PS | PM | |
| PS | PM | PS | PS | PS | ZE | ZE | ZE | |
| PM | PM | PM | PM | ZE | ZE | ZE | ZE | |
| PB | PB | PB | PB | ZE | ZE | ZE | ZE | |
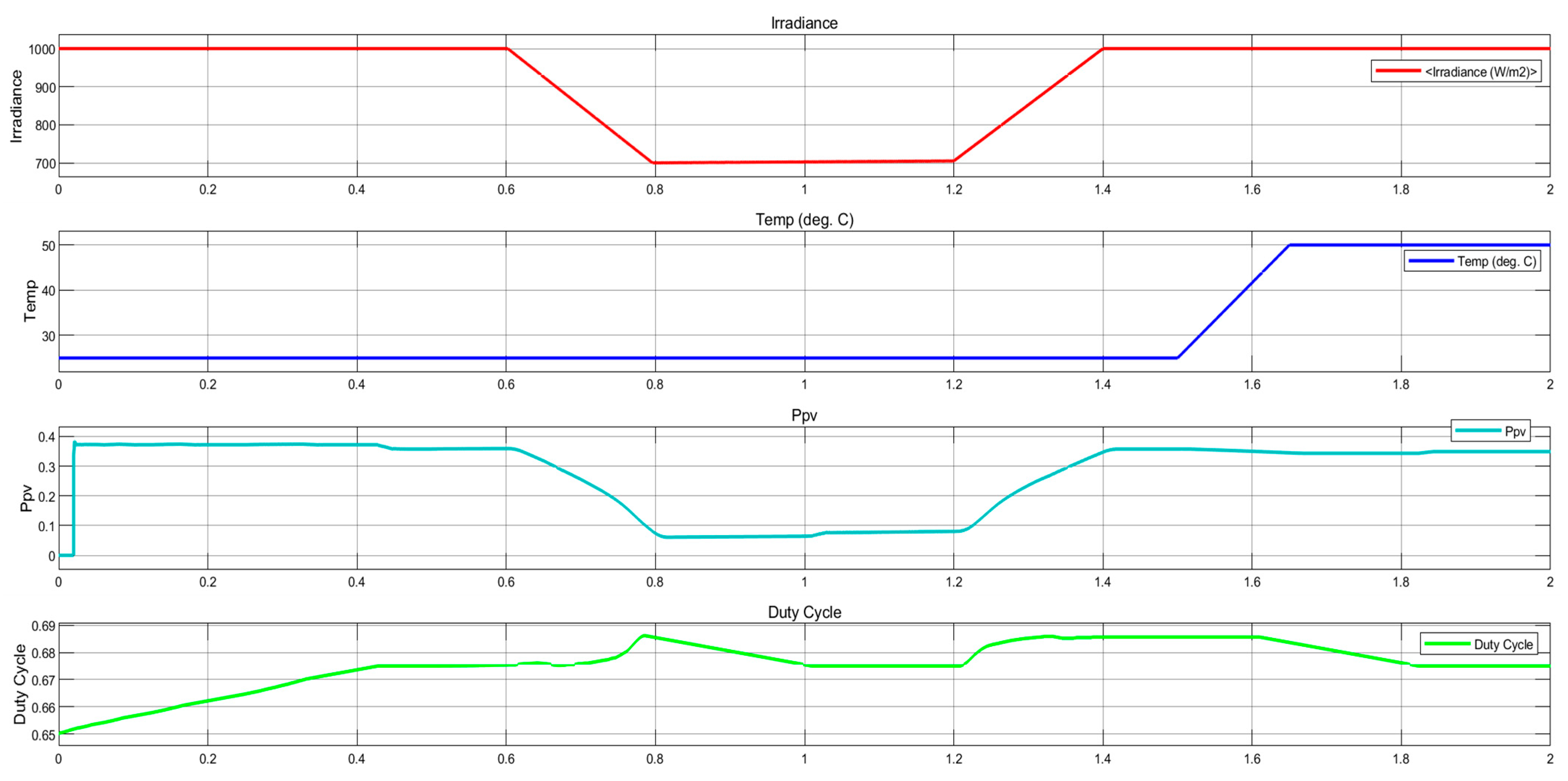
| Solar radiation variation (W/m2) | 1000 | 700 | 1000 | 1000 |
| Temperature variation (°C) | 25 | 25 | 40 | 50 |
| Ppv power variation for the P&O model (Kw) | 0.38 | 0.08 | 0.35 | 0.33 |
| Ppv power variation for the P&O with fuzzy logic controller (Kw) | 0.47 | 0.25 | 0.45 | 0.43 |
| Usource (V) | 25.40 | 26.40 | 27.50 | 28.50 | 29.50 |
| Isource (A) | 2.09 | 2.18 | 2.30 | 2.42 | 2.45 |
| Psource (W) | 53.08 | 57.55 | 63.25 | 68.97 | 72.27 |
| Uload (V) | 16.97 | 17.60 | 19.20 | 19.60 | 19.80 |
| Iload (A) | 2.35 | 2.50 | 2.60 | 2.80 | 2.85 |
| Pload (W) | 39.88 | 44.00 | 49.92 | 54.88 | 56.43 |
| Duty-cycles (0–255) | 121 | 131 | 139 | 143 | 145 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Livinti, P.; Culea, G.; Banu, I.V.; Vernica, S.G. Comparative Study of a Buck DC-DC Converter Controlled by the MPPT (P&O) Algorithm without or with Fuzzy Logic Controller. Appl. Sci. 2024, 14, 7628. https://doi.org/10.3390/app14177628
Livinti P, Culea G, Banu IV, Vernica SG. Comparative Study of a Buck DC-DC Converter Controlled by the MPPT (P&O) Algorithm without or with Fuzzy Logic Controller. Applied Sciences. 2024; 14(17):7628. https://doi.org/10.3390/app14177628
Chicago/Turabian StyleLivinti, Petru, George Culea, Ioan Viorel Banu, and Sorin Gabriel Vernica. 2024. "Comparative Study of a Buck DC-DC Converter Controlled by the MPPT (P&O) Algorithm without or with Fuzzy Logic Controller" Applied Sciences 14, no. 17: 7628. https://doi.org/10.3390/app14177628
APA StyleLivinti, P., Culea, G., Banu, I. V., & Vernica, S. G. (2024). Comparative Study of a Buck DC-DC Converter Controlled by the MPPT (P&O) Algorithm without or with Fuzzy Logic Controller. Applied Sciences, 14(17), 7628. https://doi.org/10.3390/app14177628