
CFD Research for Air Bearing with Gradient-Depth Recesses


Abstract
:1. Introduction
2. Principle Model of Guideway without Air Tube
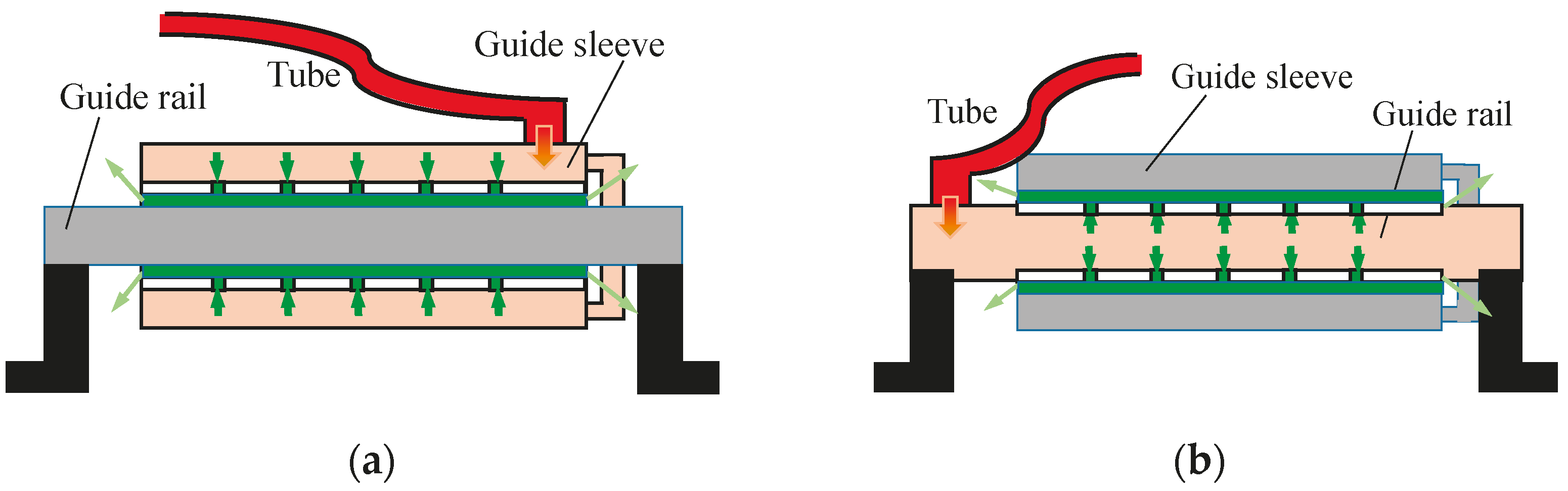
2.1. Working Principle
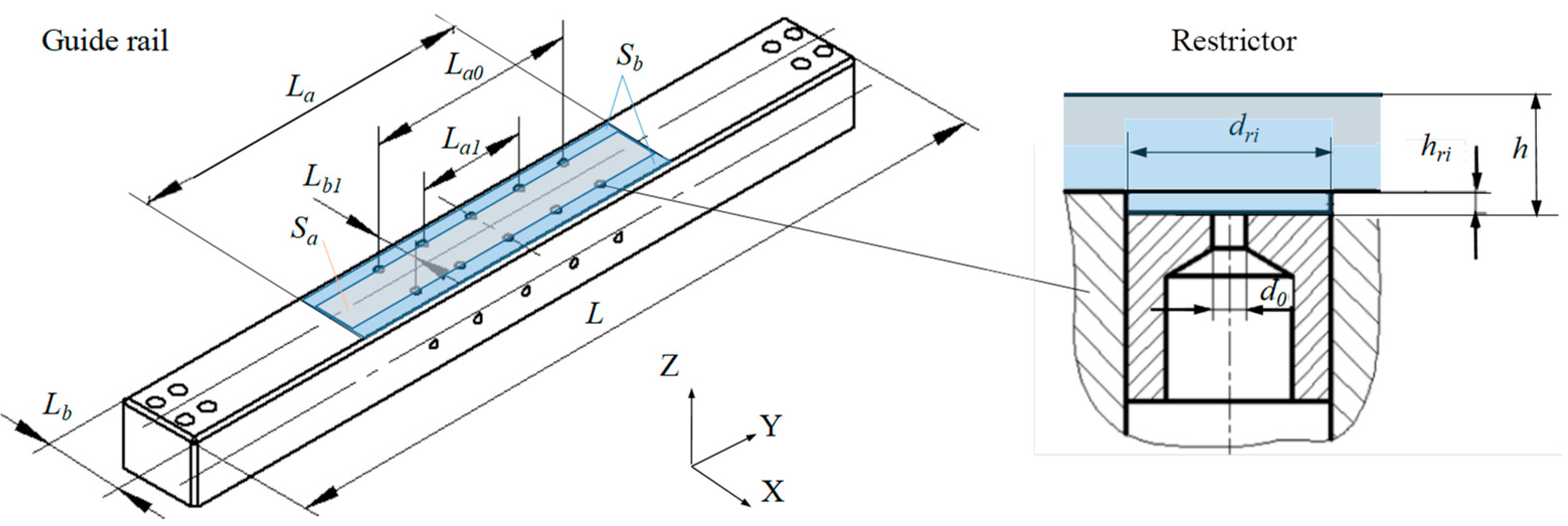
2.2. Structure and Model
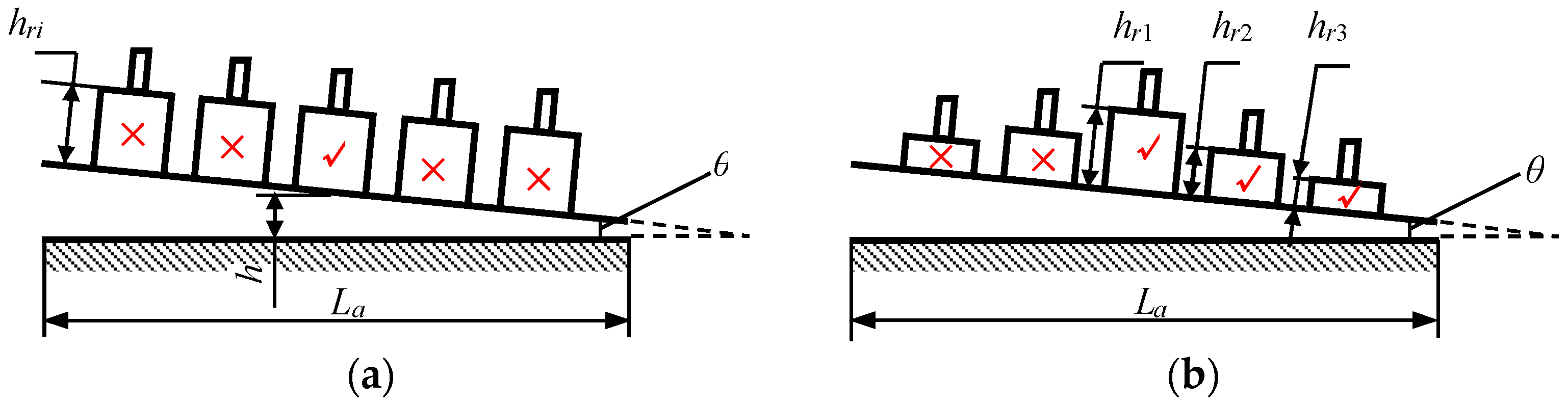
2.3. Work Distance Presupposition
3. CFD Simulation and Structure Optimization
3.1. Simulation for Unified-Depth Recesses’ Air Bearing
3.2. Principle Structure of Gradient Depth of Recesses in Air Bearing
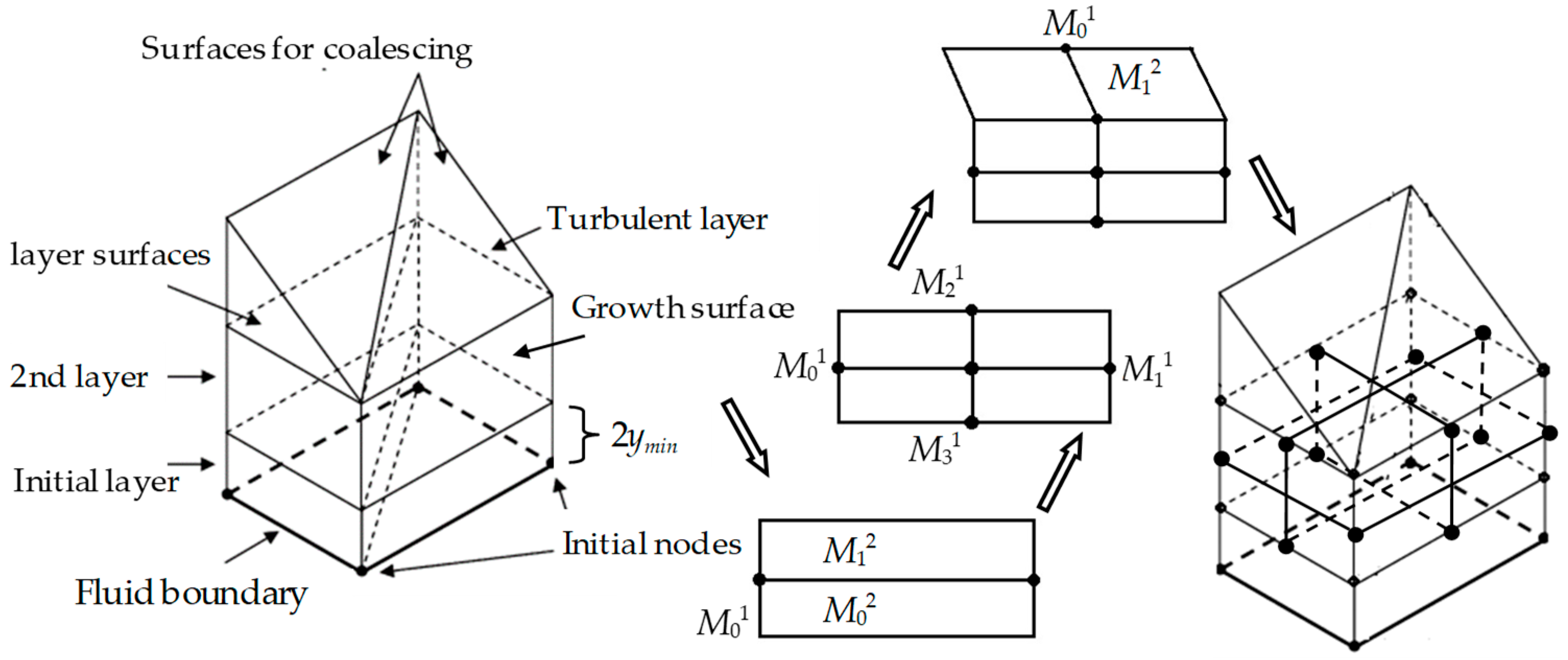
3.3. Numerical Solution of AFVM for Gradient-Depth Recesses
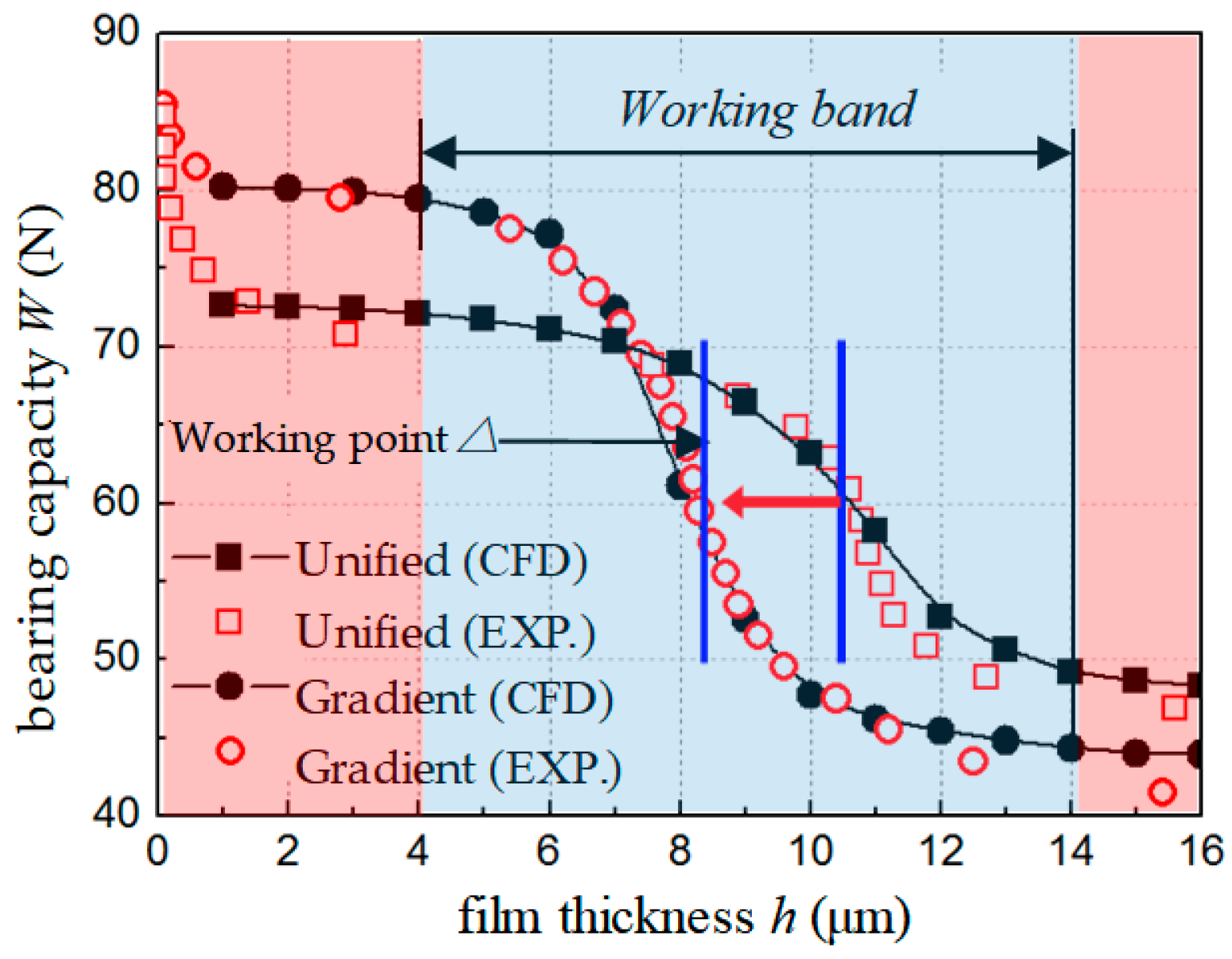
3.4. Calculation and Comparison
4. Analysis and Discussion
5. Conclusions
- (1)
- To avoid mechanical crawling and accuracy reduction from the air tube of the air bearing, we put forward a new structure of an air bearing without an air tube.
- (2)
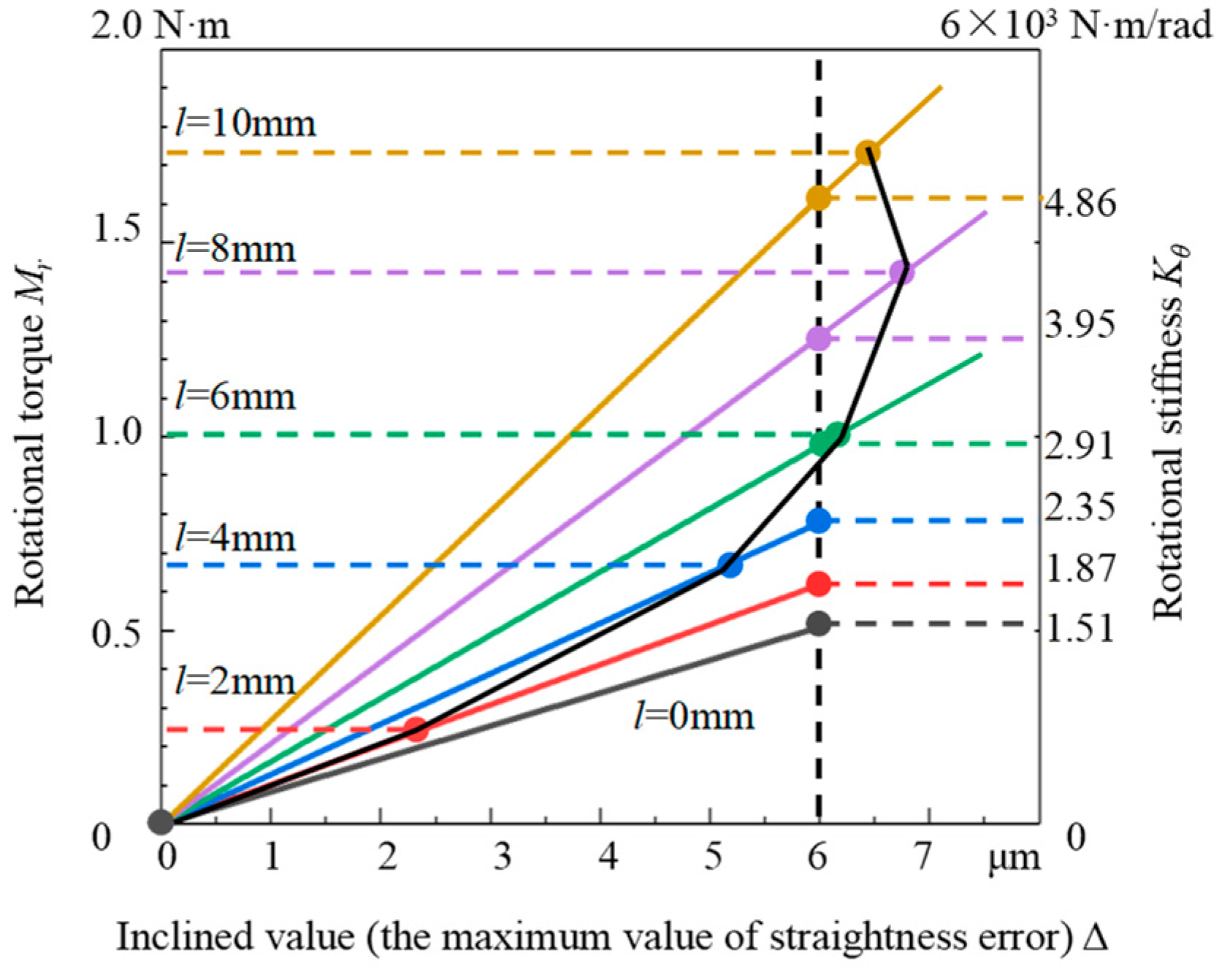
- The mechanical performance model is established. The analysis results indicate that the air bearing without an air tube needs higher rotational stiffness Kθ to ensure the moving distance and linear accuracy.
- (3)
- The result of the theoretical analysis indicates that the gradient depth of recesses could improve the guideway’s rotational stiffness, which is verified by CFD investigations of AFVM.
- (4)
- The comparison shows that gradient recesses could reduce the straightness error by improving the rotational stiffness. The straightness error caused by rotational torque is always smaller than 3 μm, less than half of the original structure. The final actual error is even smaller because of the air film homogenization effect.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Colombo, F.; Luigi, L.; Terenziano, R.; Trivella, A.; Viktorov, V. Design and Analysis of an Aerostatic Pad Controlled by a Diaphragm Valve. Lubricants 2021, 9, 47. [Google Scholar] [CrossRef]
- Yu, P.; Lu, J.; Luo, Q.; Li, G.; Yin, X. Optimization Design of Aerostatic Bearings with Square Micro-Hole Arrayed Restrictor for the Improvement of Stability: Theoretical Predictions and Experimental Measurements. Lubricants 2022, 10, 295. [Google Scholar] [CrossRef]
- Wen, Z.P.; Wu, J.W.; Xing, K.P.; Zhang, Y.; Li, J.A.; Tan, J.B. Design of Microstructure Parameters on a Small Multi-Throttle air bearing in Photolithography. Engineering 2021, 7, 226–237. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, J.W.; Xing, K.P.; Wen, Z.P.; Tan, J.B. Evaluation of measurement uncertainty of the high-speed variable-slit system based on the Monte Carlo method. Front. Mech. Eng. 2020, 15, 517–537. [Google Scholar] [CrossRef]
- Raghunathan, S. A Study of Reticle Non-Flatness Induced Image Placement Error in Extreme Ultraviolet Lithography. Ph.D. Thesis, College of Nanoscale Science and Engineering, Albany, NY, USA, 2010. [Google Scholar]
- Wu, J.W.; Wen, Z.P.; Cui, J.W.; Tan, J.B. A Wireless Cable Type Bidirectional Scanning Device. Chinese Patent CN109270805A, 26 February 2019. [Google Scholar]
- Wen, Z.P.; Wu, J.W.; Bin, D.E.; Zhang, Y.; Tan, J.B. A Slit Variable Aperture Based on Air Floatation Guidance. Chinese Patent CN108663797A, 7 May 2019. [Google Scholar]
- Wen, Z.P. Research on Design Method of Multi-Throttle Air Bearing with Recesswe and Grooves Based on Modified Discharge Coefficient. Ph.D. Thesis, Harbin Institute of Technology, Harbin, China, 2020. [Google Scholar]
- Maamari, N.; Krebs, A.; Weikert, S.; Wild, H.; Wegener, K. Stability and dynamics of an orifice based aerostatic bearing with a compliant back plate. Tribol. Int. 2019, 138, 279–296. [Google Scholar] [CrossRef]
- Zhang, J.; Han, D.; Xie, Z.; Huang, C.; Rao, Z.; Song, M.; Su, Z. Nonlinear behaviors analysis of high-speed rotor system supported by aerostatic bearings. Tribol. Int. 2021, 170, 107111. [Google Scholar] [CrossRef]
- Qi, L.; Liu, L.; Gao, Q.; Yao, Y.; Lu, L.; Gao, S. Investigation on the influence of structural rigidity on the stiffness of air bearing considering fluid-structure interaction. Tribol. Int. 2022, 173, 107658. [Google Scholar] [CrossRef]
- Feng, K.; Wang, P.; Zhang, Y.; Hou, W.; Cui, H. Novel 3-D printed aerostatic bearings for the improvement of stability: Theoretical predictions and experimental measurements. Tribol. Int. 2021, 163, 107149. [Google Scholar] [CrossRef]
- Ma, W. Study on Loading Characteristic of Parallel Micro-Channel Compensated Aerostatic Thrust Bearing. Ph.D. Thesis, Northeast Forestry University, Harbin, China, 2013. [Google Scholar]
- Wang, P.; Zhang, Y.; Feng, L.; Hou, W.; Wang, J.; Li, W.; Feng, K. Study on the pneumatic hammer phenomenon of aerostatic bearings based on the empirical mode method: Numerical and experimental analysis. Tribol. Int. 2023, 181, 108305. [Google Scholar] [CrossRef]
- Colombo, F.; Lentini, L.; Raparelli, T.; Trivella, A.; Viktorov, V. Dynamic characterisation of rectangular aerostatic pads with multiple inherent orifices. Tribol. Lett. 2018, 66, 512–521. [Google Scholar] [CrossRef]
- Li, Y.; Yin, Y.; Yang, H.; Liu, X.; Mo, J.; Cui, H. Modeling for optimization of circular flat pad aerostatic bearing with a single central orifice-type restrictor based on CFD simulation. Tribol. Int. 2017, 109, 206–216. [Google Scholar]
- Wu, Y.; Qiao, Z.; Chen, W.; Xue, J.; Wang, B. Evaluation and Application of an Engineering Calculation Method of the Static Performance of an Aerostatic Journal Bearing with Multiple Orifice-Type Restrictors. Lubricants 2021, 10, 332. [Google Scholar] [CrossRef]
- Du, J.J.; Zhang, G.Q.; Liu, T. Influences of Pressure-equalizing Groove on the Load Capacity of Externally Pressurized Gas Journal Bearings. J. Mech. Eng. 2012, 48, 106–112. [Google Scholar] [CrossRef]
- Wang, W.; Cheng, X.; Zhang, M.; Gong, W.; Cui, H. Effect of the deformation of porous materials on the performance of aerostatic bearings by fluid-solid interaction method. Tribol. Int. 2020, 150, 106391. [Google Scholar] [CrossRef]
- Wen, Z.P.; Wu, J.W.; Zhang, Y.; Cui, J.-W.; Tan, J.-B. Improving the rotational stiffness of compact air bearing by micro-structures optimization. IEEE Access 2019, 7, 55780–55787. [Google Scholar] [CrossRef]
- Mori, H.; Mori, A. Stabilizing Element for Externally Pressurized Gas-Bearing: 3rd Report, A Study of the Dynamic Characteristics. Trans. Jpn. Soc. Mech. Eng. 1967, 33, 2065–2072. [Google Scholar] [CrossRef]
- Powell, J.W. Design of Aerostatic Bearings; Ding, W.G., Lin, X.Q., Eds.; The Machinery Publishing Co., Ltd.: London, UK, 1978. [Google Scholar]
- Belforte, G.; Raparelli, T.; Viktorov, V.; Trivella, A. Discharge coefficients of orifice-type restrictor for aerostatic bearings. Tribol. Int. 2008, 40, 512–521. [Google Scholar] [CrossRef]
- Wen, Z.P.; Gu, H.; Shi, Z.Y. Key technology and design method of ultra-precision aerostatic bearing. Lubricants 2023, 11, 315. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| l (mm) | Pressure Distribution | Bearing Capacity W (N) | Eccentricity Value (mm) | Rotational Torque (N·m) | |
|---|---|---|---|---|---|
| 0 |  |  | 242 | 0 | 0 |
| 2 |  | 249 | 2 − 1.02 = 0.98 | 0.244 | |
| 4 |  | 258 | 4 − 1.34 = 2.66 | 0.686 | |
| 6 |  | 270 | 6 − 2.28 = 3.72 | 1.004 | |
| 8 |  | 268 | 8 − 2.73 = 5.27 | 1.412 | |
| 10 |  | 264 | 10 − 3.43 = 6.57 | 1.734 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, Z.; Chi, Y.; Gu, H.; Qu, H.; Shi, Z. CFD Research for Air Bearing with Gradient-Depth Recesses. Appl. Sci. 2024, 14, 7710. https://doi.org/10.3390/app14177710
Wen Z, Chi Y, Gu H, Qu H, Shi Z. CFD Research for Air Bearing with Gradient-Depth Recesses. Applied Sciences. 2024; 14(17):7710. https://doi.org/10.3390/app14177710
Chicago/Turabian StyleWen, Zhongpu, Yuchen Chi, Hui Gu, Huajie Qu, and Zhaoyao Shi. 2024. "CFD Research for Air Bearing with Gradient-Depth Recesses" Applied Sciences 14, no. 17: 7710. https://doi.org/10.3390/app14177710
APA StyleWen, Z., Chi, Y., Gu, H., Qu, H., & Shi, Z. (2024). CFD Research for Air Bearing with Gradient-Depth Recesses. Applied Sciences, 14(17), 7710. https://doi.org/10.3390/app14177710