
A Study on the Mechanical Resonance Frequency of a Piezo Element: Analysis of Resonance Characteristics and Frequency Estimation Using a Long Short-Term Memory Model

Abstract
:1. Introduction
2. Analysis of Piezo Element
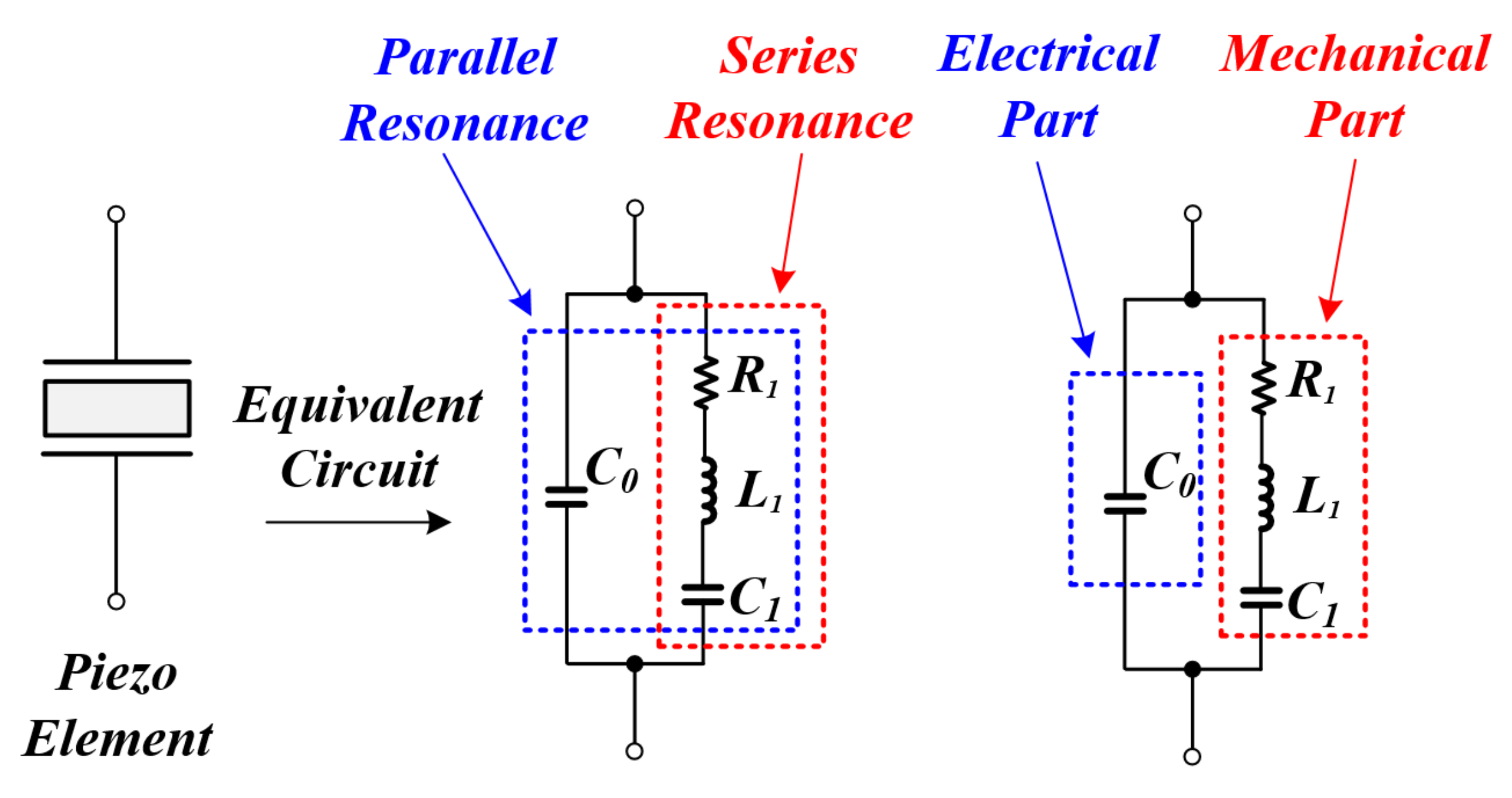
2.1. Equivalent Circuit Model Analysis and Resonance Characteristics of Piezo Element
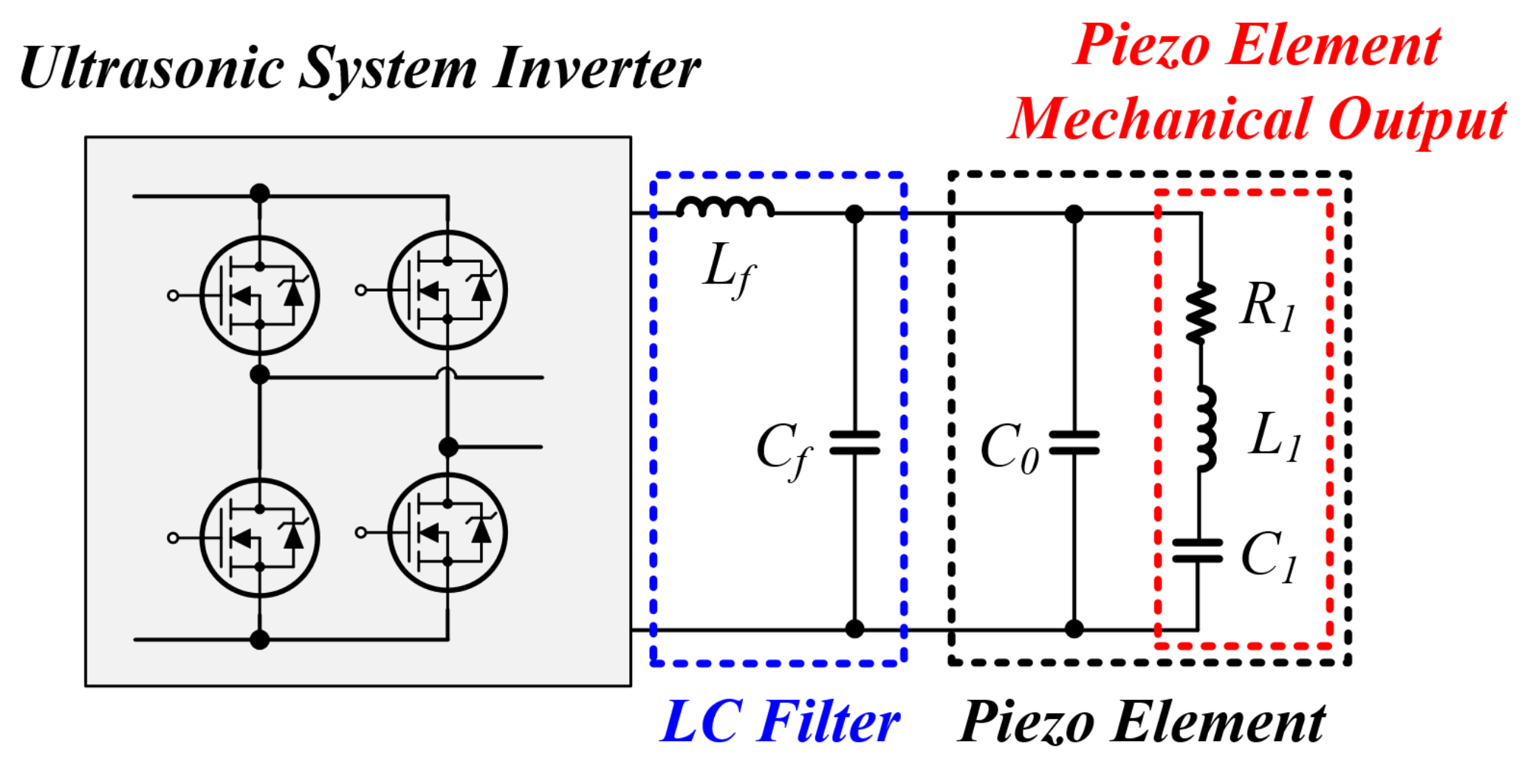
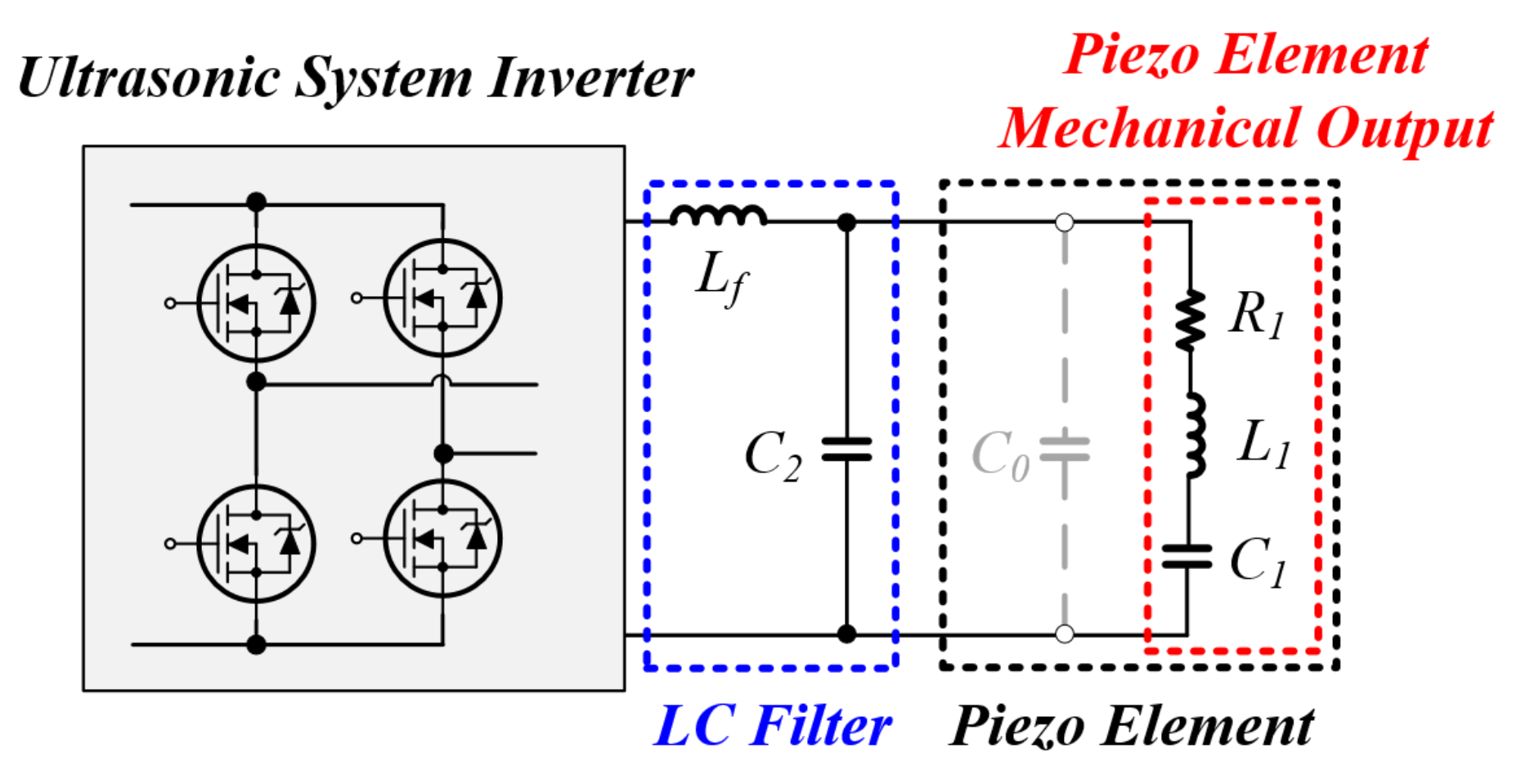
2.2. Equivalent Circuit Analysis of the Ultrasonic System Output Stage
Entire Ultrasonic System
3. Simulation
4. Experimental Results
5. Conclusions
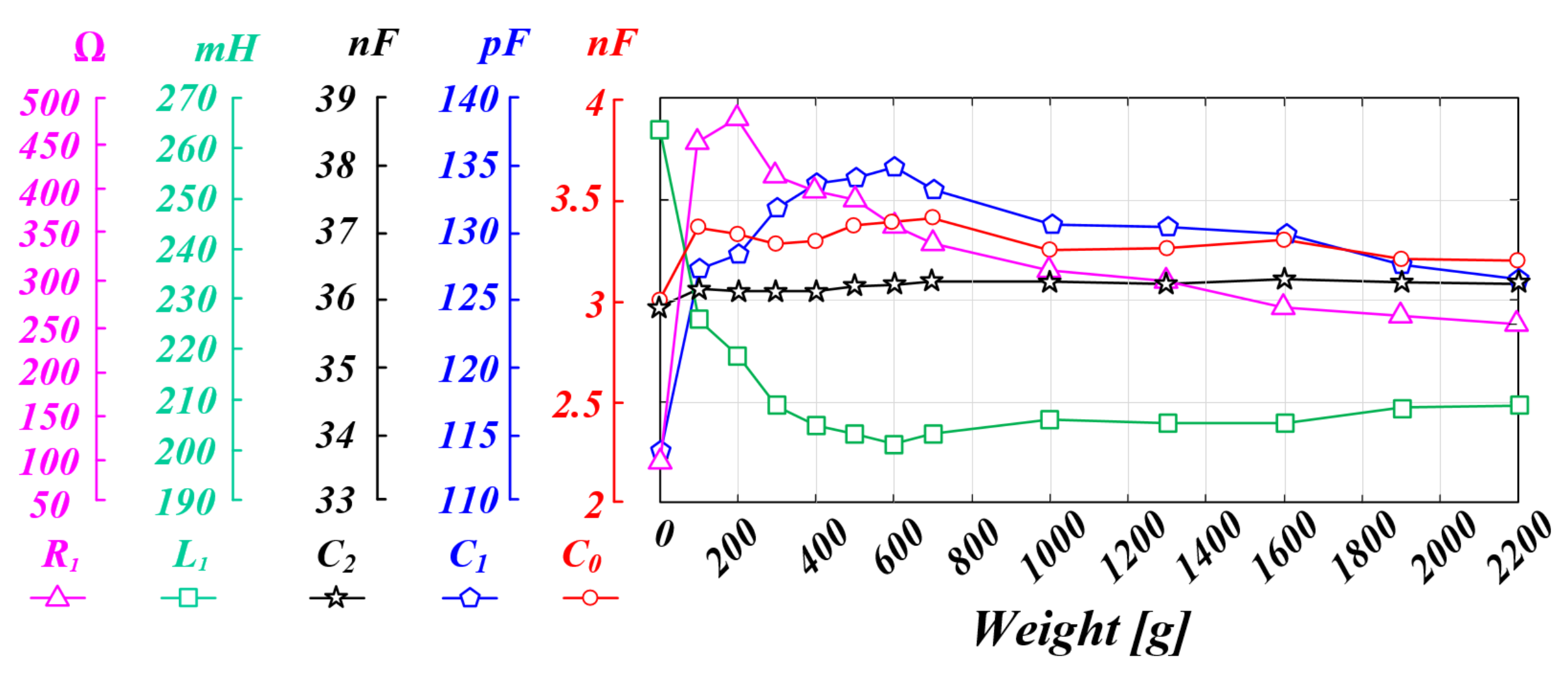
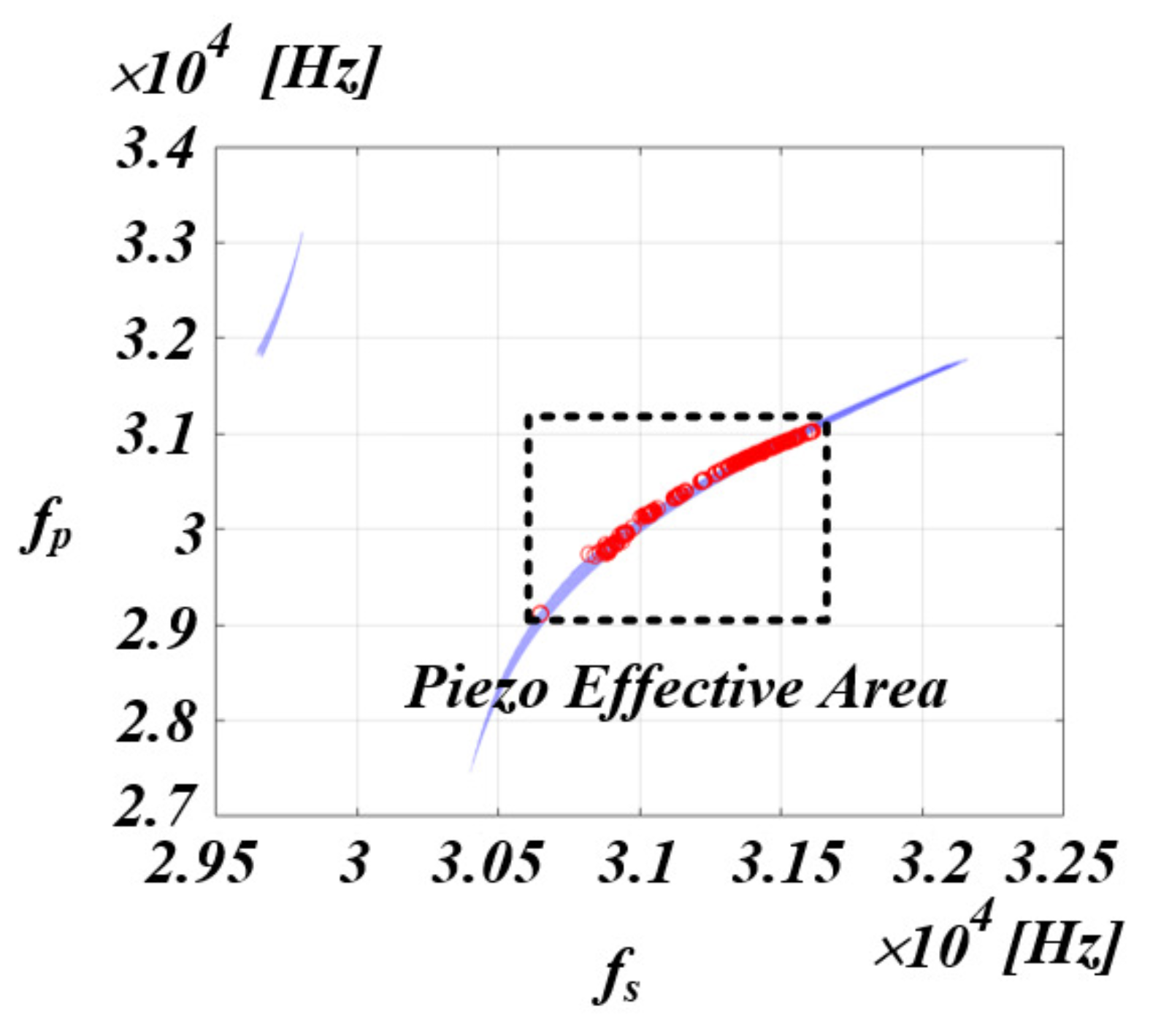
- The mechanical resonance frequency of the piezo element in the ultrasonic system shows nonlinear characteristics. Therefore, a system design that considers the characteristics of the piezo element is necessary. This includes the theory of selecting each parameter value in the filter section and impedance matching to match the resonance frequency of the inverter output stage and the resonance frequency of the piezo element as similarly as possible in the ultrasonic system.
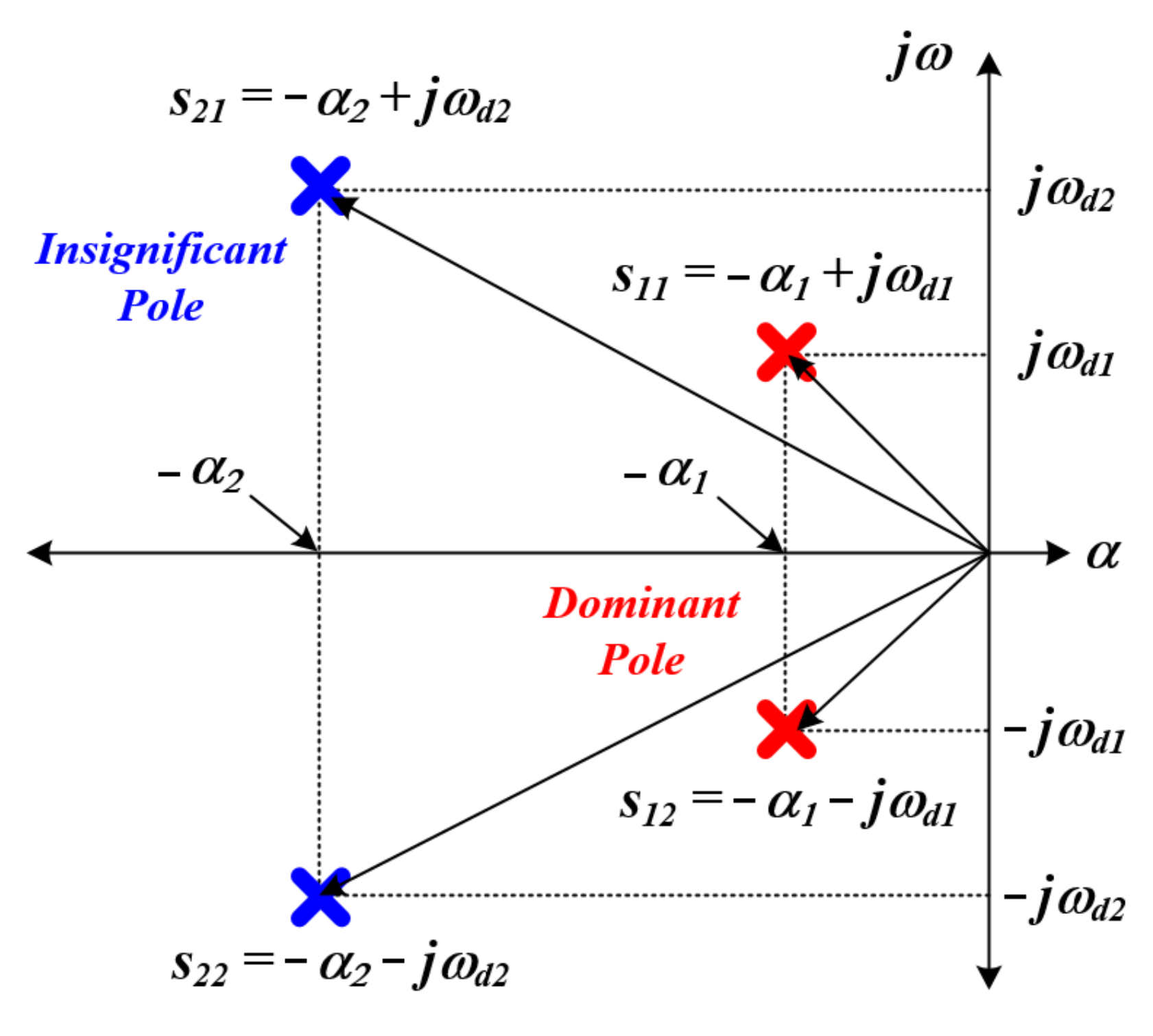
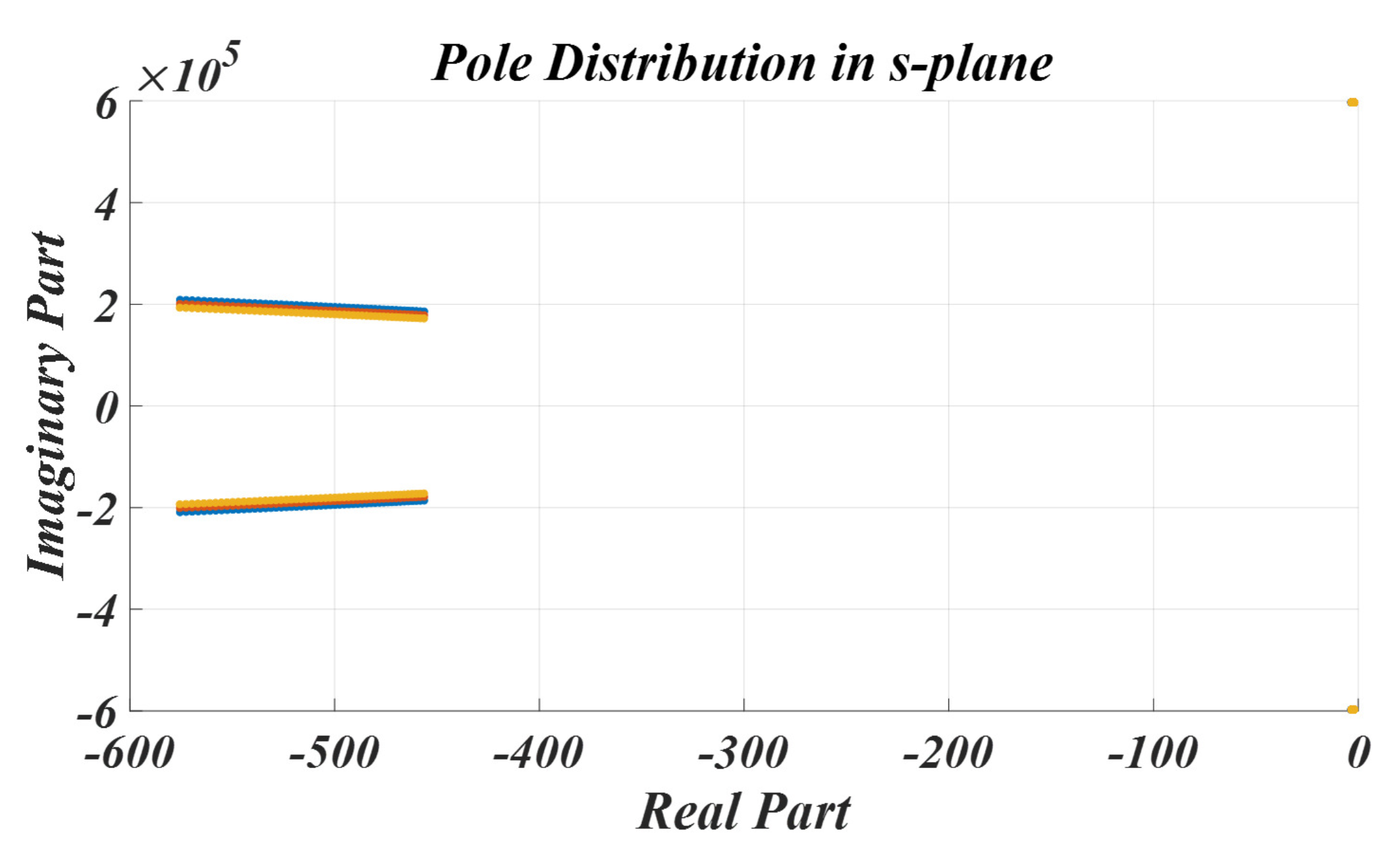
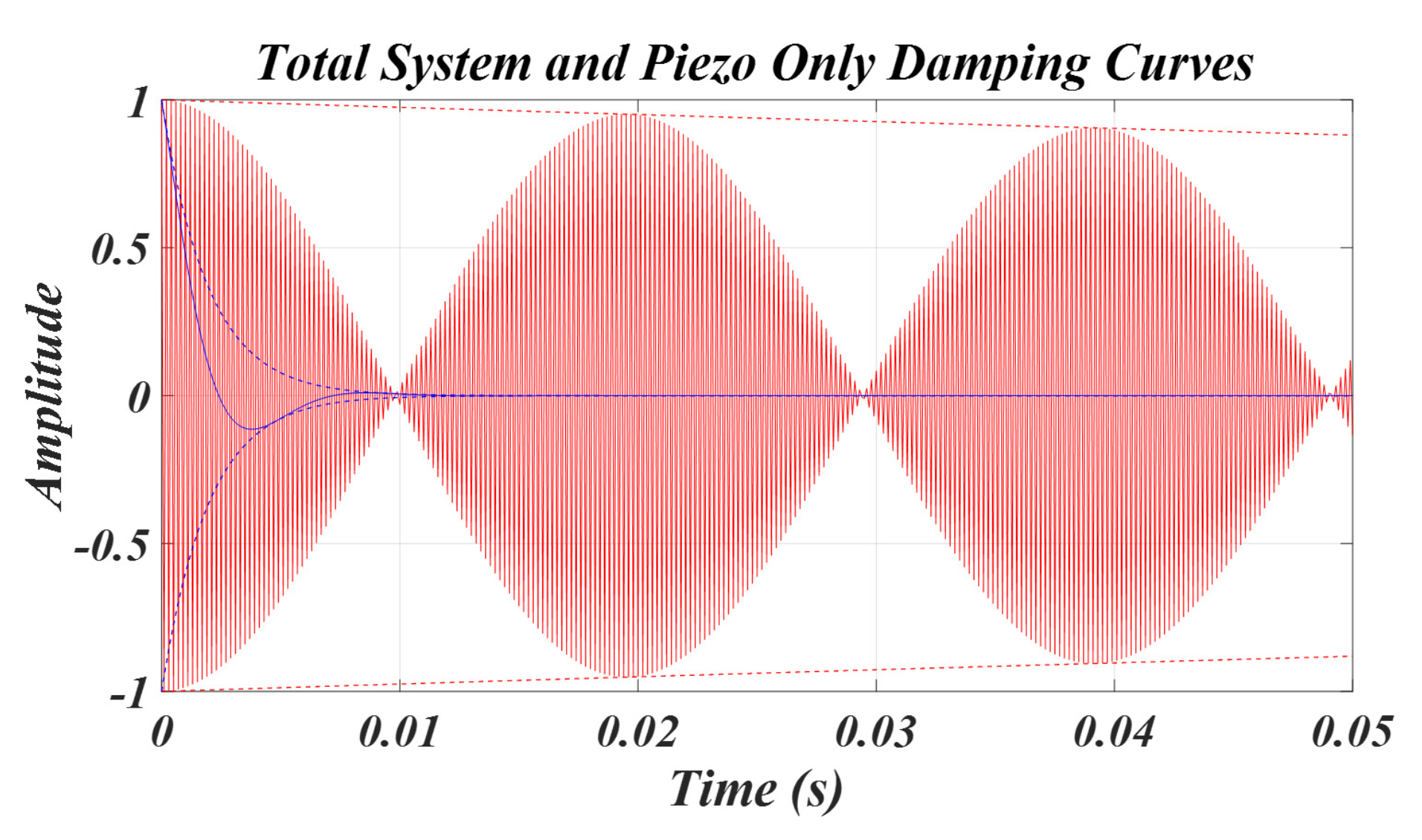
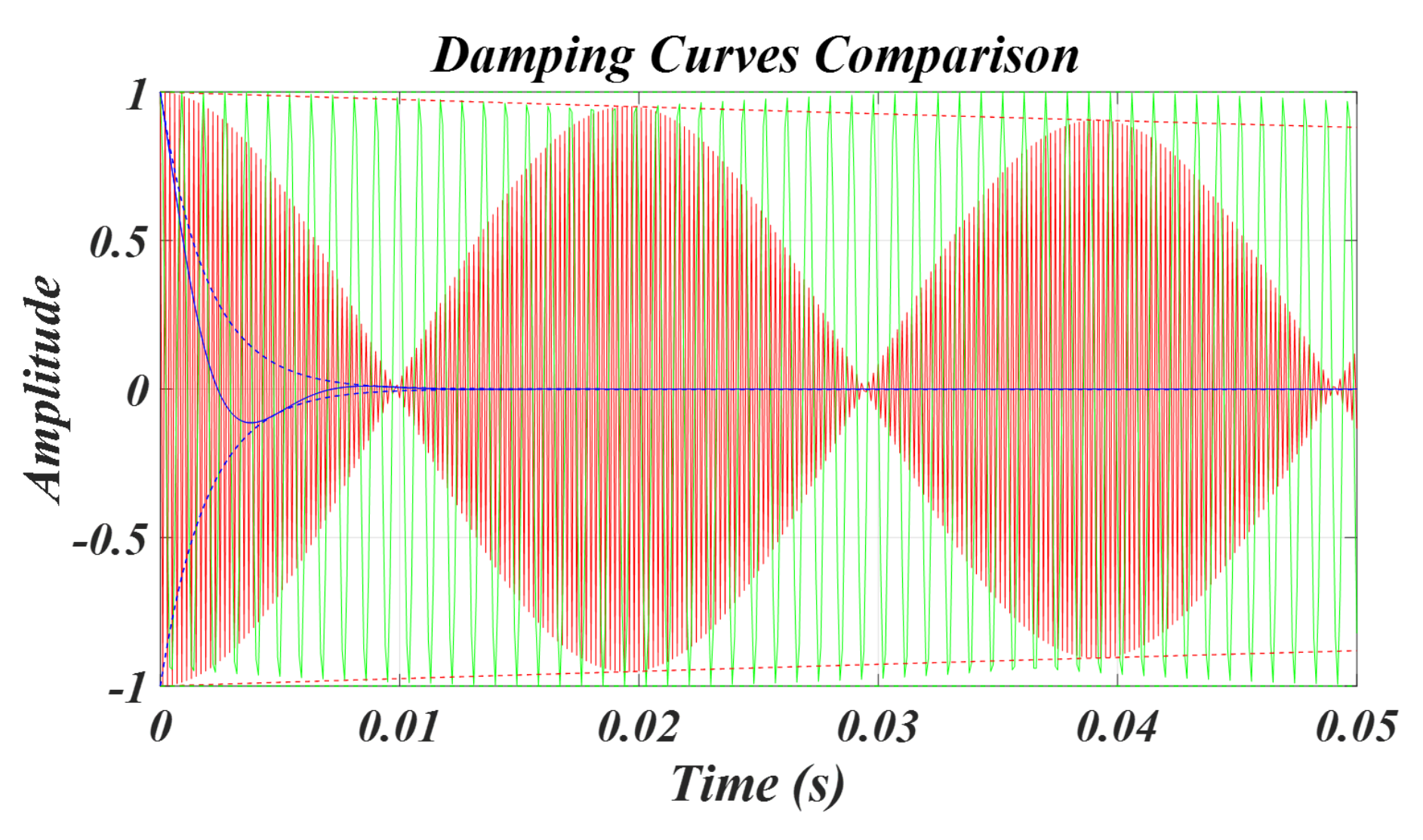
- In order to operate the system at the mechanical resonance frequency to transmit maximum power to the piezo element, the creation of an equivalent model of the piezo element and an analysis of the resonance characteristics were performed. In addition, the system was designed by analyzing the impedance of the series circuit that affects the mechanical output of the filter and the piezo element. Through this, the relationship between the system resonance frequency and the mechanical resonance frequency of the piezo element was analyzed by calculating the characteristic equation, calculating the characteristic root, calculating the damping period, and calculating the vibration period.
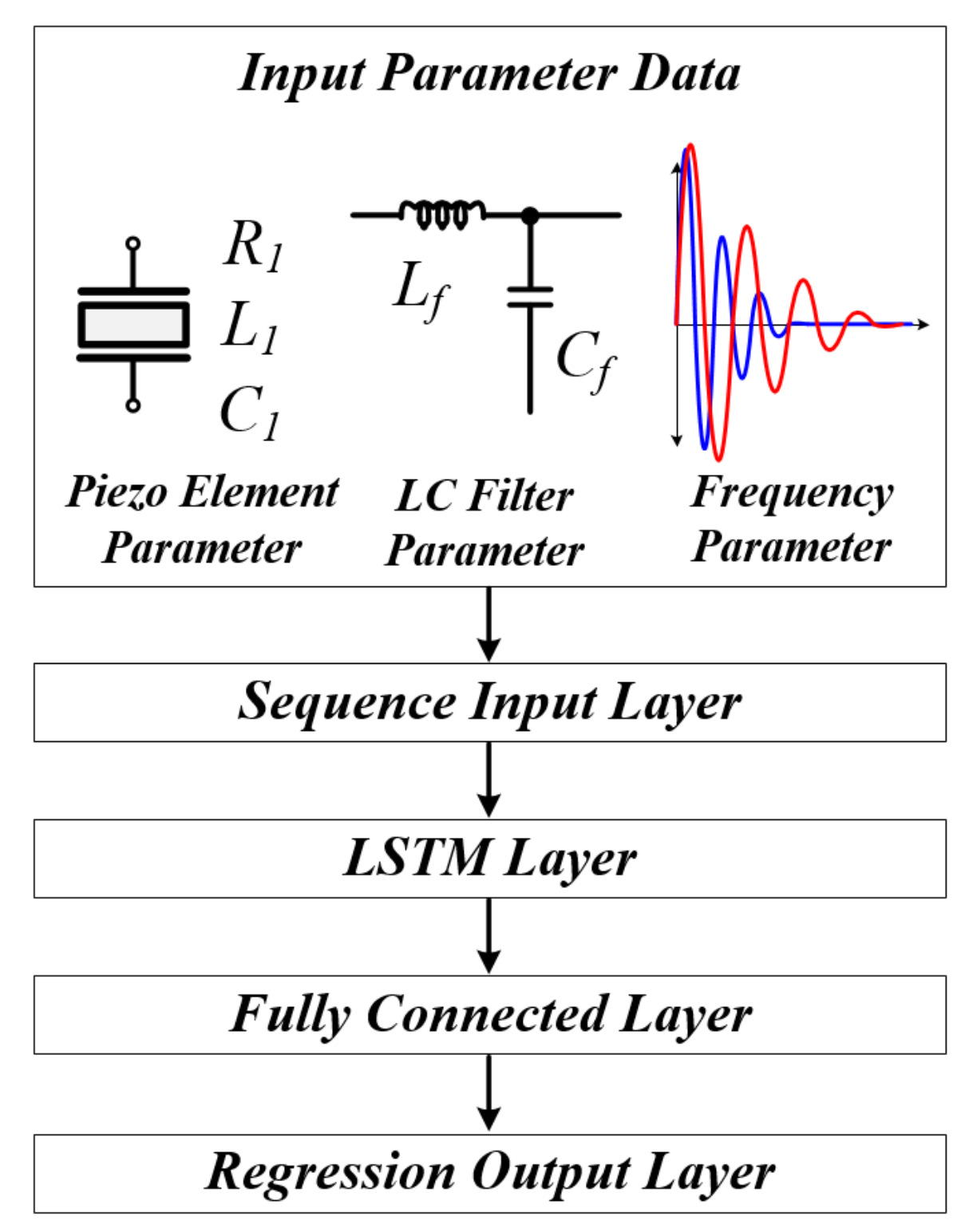
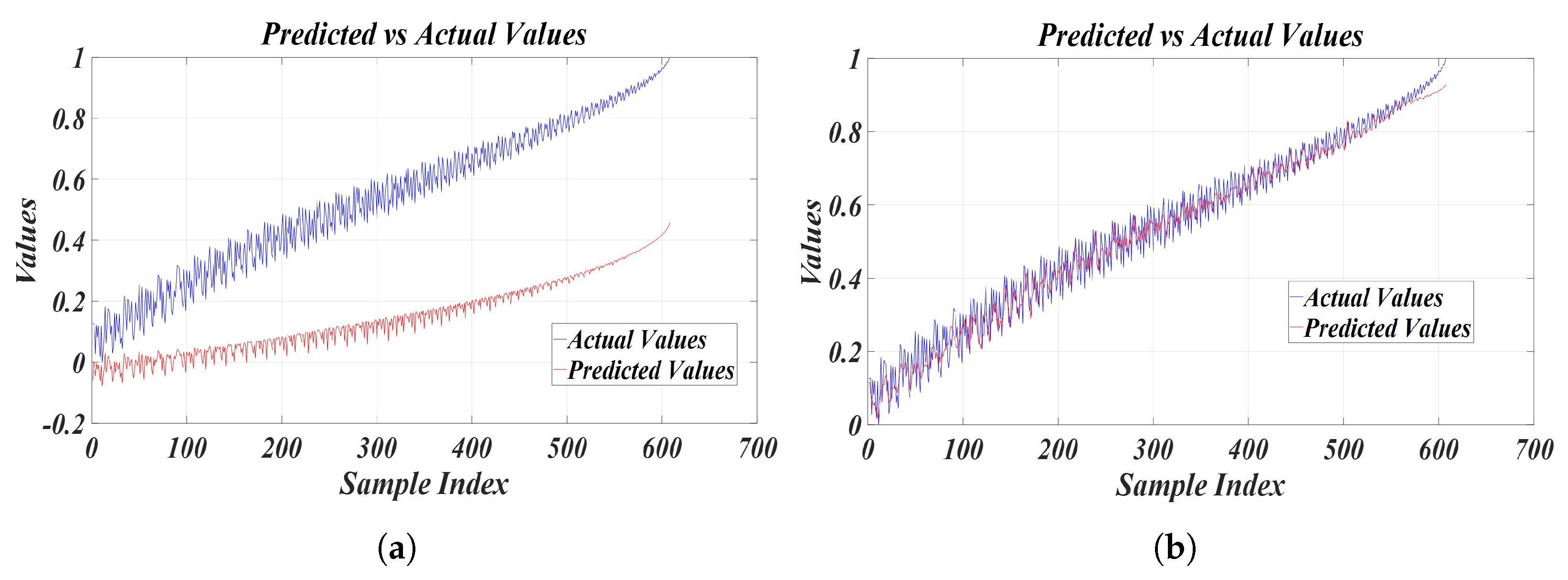
- The LSTM model was used to utilize the mechanical resonance frequency of the piezo element for efficient operation of the ultrasonic system. As a result, a method to estimate the characteristics of the entire mechanical resonance frequency range of the piezo element using the LSTM model was proposed. The relationship was verified through the analysis of the mechanical resonance frequency of the piezo element, the entire system resonance frequency of the ultrasonic system inverter output stage, and the parameter values and of the filter, and the piezo mechanical resonance frequency was estimated through this. In addition, the LSTM model showed more accurate mechanical resonance frequency estimation results than the nonlinear regression model in the piezo element with nonlinear characteristics.
- Since the LSTM model can learn complex temporal dependencies, including nonlinearity, it can better model the complex response of the piezoelectric element. Since the LSTM model shows strength in simultaneously learning and predicting multiple modes, it is effective even in complex systems with multiple frequency modes. The estimation of the mechanical resonance frequency of a piezoelectric element using the LSTM model can show superior performance in processing complex nonlinear systems compared to existing methods. In addition, it can enable more accurate and stable frequency estimation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kentish, S.; Feng, H. Applications of power ultrasound in food processing. Annu. Rev. Food Sci. Technol. 2014, 5, 263–284. [Google Scholar] [CrossRef]
- Luong, V.D.; Duong, P.T.M.; Nguyen, T.B.N.; Ngo, N.K.; Nguyen, T.H. Dynamic response of high-power ultrasonic system based on finite element modeling of piezoelectric. J. Appl. Eng. Sci. 2023, 21, 859–871. [Google Scholar] [CrossRef]
- Wellendorf, A.; von Damnitz, L.; Nuri, A.W.; Anders, D.; Trampnau, S. Determination of the temperature-dependent resonance behavior of ultrasonic transducers using the finite-element method. J. Vib. Eng. Technol. 2024, 12, 1277–1290. [Google Scholar] [CrossRef]
- Chen, J.; Li, P.; Song, G.; Ren, Z. Piezo-based wireless sensor network for early-age concrete strength monitoring. Optik 2016, 127, 2983–2987. [Google Scholar] [CrossRef]
- Tao, Y.; Hwachun, L.; Dongheon, L.; Sunggun, S.; Dongok, K.; Sungjun, P. Design of LC Resonant Inverter for Ultrasonic Metal Welding System. In Proceedings of the 2008 International Conference on Smart Manufacturing Application, Goyangi, Republic of Korea, 9–11 April 2008; pp. 543–548. [Google Scholar]
- Fernández-Afonso, Y.; García-Zaldívar, O.; Calderón-Piñar, F. Equivalent circuit for the characterization of the resonance mode in piezoelectric systems. J. Adv. Dielectr. 2015, 5, 1550032. [Google Scholar] [CrossRef]
- Lin, S.; Xu, J. Effect of the matching circuit on the electromechanical characteristics of sandwiched piezoelectric transducers. Sensors 2017, 17, 329. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Dupont, J.; Tang, J. On integration of vibration suppression and energy harvesting through piezoelectric shunting with negative capacitance. IEEE/ASME Trans. Mechatron. 2023, 28, 2621–2632. [Google Scholar] [CrossRef]
- Yu, H.; Zhou, J.; Deng, L.; Wen, Z. A vibration-based MEMS piezoelectric energy harvester and power conditioning circuit. Sensors 2014, 14, 3323–3341. [Google Scholar] [CrossRef]
- Malikan, M.; Eremeyev, V.A. On the dynamics of a visco–piezo–flexoelectric nanobeam. Symmetry 2020, 12, 643. [Google Scholar] [CrossRef]
- Jiang, W.W.; Gao, X.W. Analysis of thermo-electro-mechanical dynamic behavior of piezoelectric structures based on zonal Galerkin free element method. Eur. J.-Mech.-A/Solids 2023, 99, 104939. [Google Scholar] [CrossRef]
- Yang, C.; Sun, H.; Liu, S.; Qiu, L.; Fang, Z.; Zheng, Y. A Broadband Resonant Noise Matching Technique for Piezoelectric Ultrasound Transducers. IEEE Sensors J. 2019, 20, 4290–4299. [Google Scholar] [CrossRef]
- Rathod, V.T. A review of electric impedance matching techniques for piezoelectric sensors, actuators and transducers. Electronics 2019, 8, 169. [Google Scholar] [CrossRef]
- Wang, J.D.; Jiang, J.J.; Duan, F.J.; Cheng, S.Y.; Peng, C.X.; Liu, W.; Qu, X.H. A high-tolerance matching method against load fluctuation for ultrasonic transducers. IEEE Trans. Power Electron. 2019, 35, 1147–1155. [Google Scholar] [CrossRef]
- Ju, B.; Fang, L.; Wang, Q.; Xu, J.; Li, G.; Liu, Y. General rules for the inductive characteristics of a piezoelectric structure and its integration with piezoelectric transformer for capacitive compensation. Smart Mater. Struct. 2021, 30, 045018. [Google Scholar] [CrossRef]
- Pan, Z.; Ren, D.; Spiazzi, G.; Wei, S.; Yang, J.; Nie, B.L.; Du, P. An equivalent modeling method of passive components with multi-resonant frequency. Int. J. Circuit Theory Appl. 2023, 51, 2689–2704. [Google Scholar] [CrossRef]
- Kumar, P.; Leonardi, N. Exploring mega-nourishment interventions using Long Short-Term Memory (LSTM) models and the sand engine surface MATLAB framework. Geophys. Res. Lett. 2024, 51, e2023GL106042. [Google Scholar] [CrossRef]
- Sabareesh, S.; Aravind, K.; Chowdary, K.B.; Syama, S.; VS, K.D. LSTM based 24 h ahead forecasting of solar PV system for standalone household system. Procedia Comput. Sci. 2023, 218, 1304–1313. [Google Scholar] [CrossRef]
- Parida, L.; Moharana, S.; Ferreira, V.M.; Giri, S.K.; Ascensão, G. A novel CNN-LSTM hybrid model for prediction of electro-mechanical impedance signal based bond strength monitoring. Sensors 2022, 22, 9920. [Google Scholar] [CrossRef]
- Yang, R.; Singh, S.K.; Tavakkoli, M.; Amiri, N.; Yang, Y.; Karami, M.A.; Rai, R. CNN-LSTM deep learning architecture for computer vision-based modal frequency detection. Mech. Syst. Signal Process. 2020, 144, 106885. [Google Scholar] [CrossRef]
- Hoseyni, S.M.; Aghakhani, A.; Basdogan, I. Experimental admittance-based system identification for equivalent circuit modeling of piezoelectric energy harvesters on a plate. Mech. Syst. Signal Process. 2024, 208, 111016. [Google Scholar] [CrossRef]
- Wang, J.; Xiong, C.; Huang, J.; Peng, J.; Zhang, J.; Zhao, P. Waveform design method for piezoelectric print-head based on iterative learning and equivalent circuit model. Micromachines 2023, 14, 768. [Google Scholar] [CrossRef]
- Duan, B.; Wu, K.; Chen, X.; Ni, J.; Ma, X.; Meng, W.; Lam, K.h.; Yu, P. Bioinspired PVDF piezoelectric generator for harvesting multi-frequency sound energy. Adv. Electron. Mater. 2023, 9, 2300348. [Google Scholar] [CrossRef]
- Zhang, Y.; Yang, T.; Du, H.; Zhou, S. Wideband vibration isolation and energy harvesting based on a coupled piezoelectric-electromagnetic structure. Mech. Syst. Signal Process. 2023, 184, 109689. [Google Scholar] [CrossRef]
- Bonnin, M.; Song, K. Frequency domain analysis of a piezoelectric energy harvester with impedance matching network. Energy Harvest. Syst. 2023, 10, 135–144. [Google Scholar] [CrossRef]
- Zhang, K.; Gao, G.; Zhao, C.; Wang, Y.; Wang, Y.; Li, J. Review of the design of power ultrasonic generator for piezoelectric transducer. Ultrason. Sonochem. 2023, 96, 106438. [Google Scholar] [CrossRef]
- Taşlıyol, M.; Öncü, S.; Turan, M.E. An implementation of class D inverter for ultrasonic transducer mixed powder mixture. Ultrason. Sonochem. 2024, 104, 106838. [Google Scholar] [CrossRef]
- Asemi, Z.; Beiranvand, R. Using a High Frequency LC Resonant Inverter for Ultrasonic Cleaning Applications. In Proceedings of the 2023 14th Power Electronics, Drive Systems, and Technologies Conference (PEDSTC), Babol, Iran, 31 January–2 February 2023; pp. 1–6. [Google Scholar]
- Cai, Y.; He, Y.; Zhang, H.; Zhou, H.; Liu, J. Integrated design of filter and controller parameters for low-switching-frequency grid-connected inverter based on harmonic state-space model. IEEE Trans. Power Electron. 2023, 38, 6455–6473. [Google Scholar] [CrossRef]
- Moon, J.; Park, S.; Lim, S. A novel high-speed resonant frequency tracking method using transient characteristics in a piezoelectric transducer. Sensors 2022, 22, 6378. [Google Scholar] [CrossRef] [PubMed]
- Ruderman, M. Time-delay based output feedback control of fourth-order oscillatory systems. Mechatronics 2023, 94, 103015. [Google Scholar] [CrossRef]
- Cao, Q. Dynamic surface sliding mode control of chaos in the fourth-order power system. Chaos Solitons Fractals 2023, 170, 113420. [Google Scholar] [CrossRef]
- Dincel, E.; Söylemez, M.T. Limitations on Dominant Pole Pair Selection with Continuous PI and PID Controllers. In Proceedings of the 2016 International Conference on Control, Decision and Information Technologies (CoDIT), Saint Julian’s, Malta, 6–8 April 2016; pp. 741–745. [Google Scholar]
- Dai, Y.; Li, D.; Wang, D. Review on the nonlinear modeling of hysteresis in piezoelectric ceramic actuators. Actuators 2023, 12, 442. [Google Scholar] [CrossRef]
- Alrbai, M.; Alahmer, H.; Alahmer, A.; Al-Rbaihat, R.; Aldalow, A.; Al-Dahidi, S.; Hayajneh, H. Retrofitting conventional chilled-water system to a solar-assisted absorption cooling system: Modeling, polynomial regression, and grasshopper optimization. J. Energy Storage 2023, 65, 107276. [Google Scholar] [CrossRef]
- Zuo, Y.; Zuo, H. Least sum of squares of trimmed residuals regression. Electron. J. Stat. 2023, 17, 2416–2446. [Google Scholar] [CrossRef]
- Wang, Z.; Cai, Y.; Liu, D.; Qiu, F.; Sun, F.; Zhou, Y. Intelligent classification of coal structure using multinomial logistic regression, random forest and fully connected neural network with multisource geophysical logging data. Int. J. Coal Geol. 2023, 268, 104208. [Google Scholar] [CrossRef]
- Aigrain, S.; Foreman-Mackey, D. Gaussian process regression for astronomical time series. Annu. Rev. Astron. Astrophys. 2023, 61, 329–371. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Parameter Values | Conditions |
|---|---|---|
| 220 | - | |
| 190 to 240 mH | Increase by 1 mH | |
| 120 to 140 pF | Increase by 1 pF | |
| 3.25 nF | Fixed value | |
| 870 H | - | |
| 33 nF | - | |
| filter resonant frequency | 28.3 kHz | Filter capacitor |
| Parameters | Parameter Values |
|---|---|
| Input Dimension | 1 |
| Number of Hidden Units | 200 |
| Number of Epochs | 200 |
| Batch Size | 100 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moon, J.; Lim, S.; Kim, J.; Kang, G.; Kim, B. A Study on the Mechanical Resonance Frequency of a Piezo Element: Analysis of Resonance Characteristics and Frequency Estimation Using a Long Short-Term Memory Model. Appl. Sci. 2024, 14, 7833. https://doi.org/10.3390/app14177833
Moon J, Lim S, Kim J, Kang G, Kim B. A Study on the Mechanical Resonance Frequency of a Piezo Element: Analysis of Resonance Characteristics and Frequency Estimation Using a Long Short-Term Memory Model. Applied Sciences. 2024; 14(17):7833. https://doi.org/10.3390/app14177833
Chicago/Turabian StyleMoon, Jeonghoon, Sangkil Lim, Jinhong Kim, Geonil Kang, and Beomhun Kim. 2024. "A Study on the Mechanical Resonance Frequency of a Piezo Element: Analysis of Resonance Characteristics and Frequency Estimation Using a Long Short-Term Memory Model" Applied Sciences 14, no. 17: 7833. https://doi.org/10.3390/app14177833