Abstract
Drone area coverage primarily involves using unmanned aerial vehicles (UAVs) for extensive monitoring, surveying, communication, and other tasks over specific regions. The significance and value of this technology are multifaceted. Firstly, UAVs can rapidly and efficiently reach remote or inaccessible areas to perform tasks such as terrain mapping, disaster monitoring, or search and rescue, significantly enhancing response speed and execution efficiency. Secondly, drone area coverage in agricultural monitoring, forestry conservation, and urban planning offers high-precision data support, aiding scientists and decision-makers in making more accurate judgments and decisions. Additionally, drones can serve as temporary communication base stations in areas with poor communication, ensuring the transfer of crucial information. Drone area coverage technology is vital in improving work efficiency, reducing costs, and strengthening decision support. This paper aims to solve the optimization problem of multi-UAV area coverage flight path planning to enhance system efficiency and task execution capability. For multi-center optimization problems, a region decomposition method based on the Voronoi graph is designed, transforming the multi-UAV area coverage issue into the single-UAV area coverage problem, greatly simplifying the complexity and computational process. For the single-UAV area coverage problem and its corresponding area, this paper contrives a convolutional neural network with the channel and spatial attention mechanism (CSAM) to enhance feature fusion capability, enabling the model to focus on core features for solving single-UAV path selection and ultimately generating the optimal path. Simulation results demonstrate that the proposed method achieves excellent performance.
1. Introduction
The rapid advancement in UAV technology has made it indispensable across various sectors, including agriculture, environmental protection, disaster relief, and engineering surveying [1]. As regional coverage tasks become increasingly complex, a single-UAV often needs help to complete detection tasks efficiently. Coordinating multiple UAVs offers a solution by enabling comprehensive data coverage over large areas and extended durations with enhanced robustness. As the deployment of drones increases, optimizing their coordination, trajectory planning, and collision avoidance has become crucial [2,3,4,5]. This paper introduces a novel approach to multi-UAV trajectory planning designed to enhance efficiency and task execution. By aligning with the specific needs of the field, our method thoroughly addresses the unique characteristics of drone tasks and the environmental factors involved in regional coverage. We offer a comprehensive solution that ensures accuracy, safety, and efficiency in multi-UAV trajectory planning. Our research not only aims to improve the overall effectiveness of multi-UAV systems but also supports the broader adoption and investment in UAV technology across various sectors.
At present, multi-UAV regional coverage trajectory planning is another important research direction in this field, in addition to path optimization algorithms, dynamic decision-making, collaborative operation, and improved sensor networks [6]. It aims to use multiple UAVs to achieve adequate coverage and real-time monitoring of specific target areas. In the future, as the application demand for UAV technology gradually expands, research in this field will continue to improve and innovate. The intelligent algorithms for multi-UAV trajectory planning are mainly intelligent optimization and machine learning algorithms, including neural network and reinforcement learning algorithms [7,8,9,10].
Intelligent optimization algorithms are widely used in the field of UAV trajectory planning. Researchers use various intelligent optimization algorithms to solve problems in UAV systems, such as path deployment [11], task allocation [12], and control strategies [13], aiming to find the optimal solution or approximate optimal solution. Intelligent optimization algorithms can not only see the optimal trajectory planning route in a short time but also adjust the trajectory planning in real time according to environmental changes and task requirements, adapt to various mission scenarios, and thus significantly improve the mission execution efficiency of UAVs. However, it has a local optimal solution and cannot guarantee the finding of a global optimal solution, which will inevitably affect the accuracy of trajectory planning results [14]. At the same time, some intelligent optimization algorithms require significant computing resources, or some parameters need to be adjusted. When in a scenario with high requirements for real-time decision-making, it will cause inevitable delays in the application of multiple UAVs.
In multi-UAV trajectory planning, a neural network algorithm can be used to predict the optimal route of UAVs under different environmental conditions. It has good learning and adaptability and can adapt to complex and changeable flight scenarios in the real world through a large amount of training data, thereby improving the robustness and safety of path planning [15]. At the same time, when a neural network algorithm is applied to UAV trajectory planning, it inevitably requires a large amount of high-quality training data, and the training process is usually time-consuming, requiring a large number of iterative training to achieve good performance.
As an intelligent reinforcement learning agent, the drone gradually learns the optimal flight path planning strategy by observing the state of the environment, selecting strategies, and obtaining rewards or penalties based on feedback from the environment. Reinforcement learning enables drones to learn autonomously in the environment and dynamically adjust the trajectory planning scheme for different environments and tasks without human intervention. It can also transfer the learned planning strategies to other drones and environments [16]. However, it should be noted that the randomness and exploratory nature of reinforcement learning cannot guarantee that the optimal solution can be obtained every time training is carried out. In addition, learning needs to be carried out in many simulations or actual environments, which will inevitably result in a long training cycle and high requirements for data quality and environmental models. Therefore, in actual application scenarios, staff must comprehensively consider the application scenario and problem characteristics to decide whether to use reinforcement learning for drone path planning.
This paper focuses on optimizing multi-UAV trajectory planning for regional coverage to enhance system efficiency and task execution. Our contributions include the following:
- (1)
- Introducing a Voronoi diagram-based regional decomposition method to simplify the multi-UAV coverage problem into manageable single-UAV coverage tasks.
- (2)
- Designing a convolutional neural network (CNN) incorporating a CSAM to improve feature fusion and focus on crucial features, thereby optimizing the trajectory planning of individual UAVs. Simulation results demonstrate the effectiveness of our approach.
2. Related Works
Multi-UAV regional coverage trajectory planning is an important research direction in the field of UAVs. The academic community proposed many methods and algorithms, which can be mainly divided into intelligent optimization algorithms, neural network algorithms, and reinforcement learning algorithms.
Intelligent optimization algorithms are widely used in practical multi-UAV regional coverage trajectory planning scenarios. Saeed, Rashid A., et al. [17] demonstrated the advantages of swarm algorithms in speeding up the path-planning process and improving the efficiency of UAV path-planning. Zhou et al. [18] proposed an improved IBA algorithm with a shorter optimization time and higher-quality optimal solution. Zhang et al. [19] introduced a new phase-encoded fruit fly optimization algorithm (FOA) to explore the optimal flight path of UAVs in complex three-dimensional terrain scenes. Sun et al. [20] proposed a path-planning method based on the improved ant colony system algorithm (IACS) for dense target group models to minimize the total time of UAV mission execution. Lin et al. [21] introduced an improved artificial bee colony algorithm (IABC) based on multi-strategy synthesis to maximize the quality of flight paths. Yang et al. [22] proposed a hierarchical recursive multi-agent genetic algorithm (HR-MAGA) with powerful global optimization capabilities and can provide adaptive path planning in real-time under dynamic environments. Pehlivanoglu et al. [23] verified the effectiveness and superiority of genetic algorithms in UAV coverage path planning in three-dimensional environments. Hu et al. [24] proposed an adaptive, non-dominated sorting genetic algorithm (Adaptive NSGA-II) to find the optimal path-planning solution. Sun et al. [25] used particle swarm optimization (PSO) to achieve multi-UAV coverage tasks while minimizing the total flight distance and maximizing the coverage rate.
Neural networks can learn from massive data samples to train models and adjust the paths in real time according to the scene, making them more adaptable to the natural environment. Wang et al. [26] proposed an algorithm that limits the new gene generation area and dynamically adjusts the evolution operator to improve the algorithm’s local search ability and search efficiency. Hang, Bin [27] introduced a method for autonomous UAV (UAV) path navigation and obstacle avoidance using deep neural networks. Wu et al. [28] trained a neural network to learn and predict the best path in real time in an unknown environment. Wang, Yanxiang, et al. [29] proposed a UAV obstacle avoidance method based on a neural network and an interfering fluid power system to achieve real-time obstacle avoidance. Amer, Karim, et al. [30] used the visual input of the UAV’s onboard camera to achieve autonomous navigation of the UAV on a predetermined path. Wei et al. [31] proposed using an iterative adaptive dynamic programming algorithm to obtain an iterative tracking control law to enhance the performance of multi-UAV tracking. Li et al. [32] obtained information from the environment based on the DQN algorithm and obtained the optimal trajectory planning strategy through learning, thereby achieving efficient regional coverage. Kothari et al. [33] explored a method based on the cerebellum model arithmetic computer to optimize the path planning of multiple UAVs to improve flight efficiency and coverage. Chen et al. [34] combined the advantages of genetic algorithms and neural networks to adjust and optimize the paths of multiple UAVs adaptively.
Reinforcement learning is learned through interaction between agents and the environment, and it adjusts its strategy according to the reward signals obtained. It has tremendous application potential in multi-UAV area coverage trajectory planning. Theile, Mirco, et al. [35] proposed a deep reinforcement learning combined with global and local map information Unmanned Aerial Vehicle (UAV) path-planning method, which enables UAVs to make movement decisions in the environment and balance mission objectives and navigation constraints. Li, Runxia, et al. [36] proposed a UAV path-planning method based on improved Q learning in unknown environments. Zi et al. [37] combined the double-screening sampling method with the deep deterministic policy gradient (DDPG) algorithm to propose the REL-DDPG algorithm. Bodi et al. [38] proposed a UAV formation positioning algorithm based on lidar to solve the problem of UAV formation control in GPS-blocked environments. Chen et al. [39] proposed a constrained multi-agent reinforcement learning method for coordinating multiple UAVs to locate and track radio frequency (RF) mobile targets jointly. Tong et al. [40] designed a long short-term memory (LSTM) DRL network to decompose the UAV navigation task into two simpler subtasks to reduce the amount of interactive data. Zha et al. [41] proposed a path-planning algorithm based on multi-agent reinforcement learning to achieve efficient coverage of the target area. Chen et al. [42] proposed a path-generation method based on deep reinforcement learning, which improved coverage efficiency and adaptability. Zhang et al. [43] Based on the reinforcement learning algorithm, the UAV can intelligently generate path-planning solutions according to the current environmental state, with more robust adaptability and flexibility. It can cope with complex and changing task requirements. Yang et al. [44] proposed 3D UAV path-planning algorithms, categorizing them into Sampling-based, Node-based optimal, Mathematical model-based, Bio-inspired, and Multi-fusion approaches. The study critically evaluates each category’s time complexity and applicability, with future work to enhance efficiency through algorithm integration. Luo, Junhai, et al. [45] proposed a UAV communication network (UAVCN) path-planning framework, discussing network structure, performance evaluation, and generic and UAVCN-specific algorithms. Semsch E [46] presented a novel occlusion-aware surveillance algorithm for UAVs that addresses the challenge of incomplete coverage due to urban obstacles. The proposed approach, which combines a variant of the 3D art gallery problem with the Traveling Salesman Problem for Dubins vehicles, is validated through high-fidelity simulations and demonstrates significant improvements in flight path planning in complex environments. Cecil, Joe [47] proposed to examine UAV-based weather monitoring, integrating cyber activities such as data collection, analysis, and planning with physical activities, including UAV deployment and weather event tracking.
The intelligent optimization algorithm can find the optimal global solution through global search, but its real-time performance could be better. The neural network algorithm can handle complex nonlinear relationships and continuously optimize the UAV’s trajectory planning through a large amount of data training to gradually improve the coverage efficiency; however, the algorithm strongly depends on data. The reinforcement learning algorithm can continuously learn through trial and error and optimize autonomously. It can be adjusted according to task requirements to optimize the UAV’s trajectory planning. This paper proposes a multi-UAV area coverage algorithm based on the reinforcement learning algorithm.
3. Method
3.1. Region Division Algorithm
By subdividing a complex or extensive area into smaller, more manageable units, a region partitioning algorithm optimizes resource allocation and management while enhancing the efficiency and accuracy of data processing, analysis, and decision-making. This algorithm computes the Voronoi diagram of a planar polygon defined by n straight lines. The steps of the algorithm are as follows.
Firstly, the linear function representing the side lengths of a planar polygon is shown in Equation (1).
where the domain is a rectangular region in the plane and the pixel size (i.e., the length or width of the pixel). Next, compute the Voronoi diagram of the polygon formed by these n-line segments within this rectangular region. Specifically, identify the n sets of pixels encompassing these n-line segments in the entire pixelated area. Secondly, utilize modified affine arithmetic to determine the range of within the rectangular region . If the range of does not include zero, it implies that the region does not intersect the line segment , and thus, this region can be discarded. Otherwise, bisect the region into four subregions at its midpoint and reiterate Step 2 for each subregion until both the length and width of the region are less than or equal to the pixel size. If the region remains non-excludable, store this region in . This process yields . Thirdly, the subsequent critical step involves computing the set of pixels M within the rectangular region where the distance to the n sets of pixel collections is minimized at least at two points. We use interval arithmetic and the quadtree algorithm to address this problem. Initially, standard interval arithmetic was to calculate the interval distance between the rectangular region and each pixel individually. Then let , the interval obtained represents the shortest distance interval from the rectangular region to the line segment. Similarly, compute the shortest distance interval from the rectangular region to the line segment , resulting in the interval . Let , , then is defined as the interval of the shortest distance from the rectangular region to the n plane line segments. If only a single interval between and intersects, we can discard it. However, if at least two intervals intersect with and , then the area is divided into four parts at the midpoint. Through the recursive process of the quadtree, the subdivided parts of the area are gradually reduced until the subdivided area length and width are both less than or equal to ε If the region remains non-excludable, store this region in M. Finally, the set M represents the Voronoi diagram of the polygon. Render the planar line segments and the Voronoi diagram M. The algorithm is complete. It leverages quadtree and interval arithmetic to enhance computational efficiency, discretely calculating the set of pixels with minimal distances and ultimately deriving the Voronoi diagram of the planar polygon.
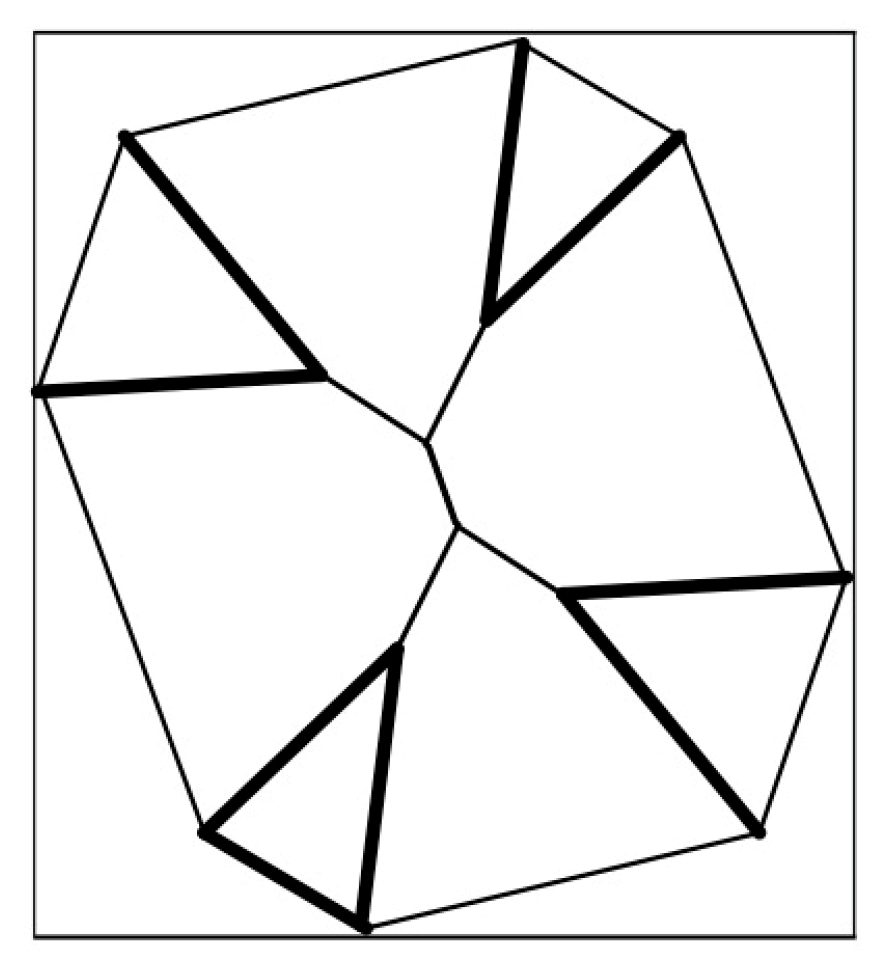
The core idea of this algorithm is to convert an arbitrary polygonal area into multiple triangles or quadrilaterals, thereby providing an effective method for solving complex multi-UAV area coverage problems. Through this transformation, the multi-UAV area coverage problem in natural scenes is subdivided into smaller regions, each of which can be handled by a single drone. As a result, each drone has a clear task area, simplifying the complex multi-UAV trajectory planning problem into more manageable single-drone trajectory planning problems, as shown in Figure 1. This approach not only significantly reduces the complexity of the problem but also improves the efficiency and accuracy of trajectory planning.
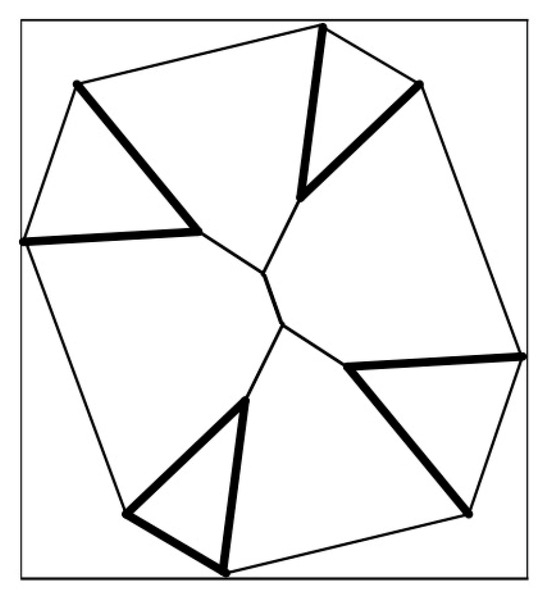
Figure 1.
Schematic diagram of regional decomposition.
Make a path covering the entire responsible area to ensure that every point in the area can be effectively covered while minimizing the flight distance as much as possible to save time and energy. To achieve this goal, the trajectory planning algorithm will consider various factors, including selecting take-off and landing points, obstacle avoidance strategies, and adjusting flight altitude and speed. Another important application of the regional decomposition algorithm is the rapid response to emergencies. Since each drone is only responsible for a relatively small area, when an emergency occurs in a specific area, such as natural disasters, environmental pollution, etc., the drone responsible for the area can quickly monitor and evaluate, and other drones can also quickly adjust their tracks as needed to assist in completing emergency tasks. This flexibility and rapid response capability are challenging based on traditional methods.
In addition, multi-UAV trajectory planning based on a regional decomposition algorithm is also conducive to collaborative work between UAVs. In actual operation, through the precise division of regions and the transparent allocation of tasks, mutual interference and conflict between UAVs can be effectively avoided, ensuring the smooth progress of the entire regional coverage task. At the same time, this method also facilitates information sharing and collaboration between UAVs. When a UAV completes a task in its area, it can adjust its action plan according to the needs of the overall task and assist other UAVs in completing the task, thereby improving the efficiency and effectiveness of the entire system.
Converting the complex multi-UAV regional coverage problem into multiple single-UAV trajectory planning problems not only greatly simplifies the complexity of the problem but also improves the efficiency and accuracy of task execution.
3.2. Basic Trajectory Optimization Algorithm
The flight path planning of UAV cooperative operation belongs to the category of full coverage flight path planning. The problem is described as follows: given several UAVs and a bounded operation area to be covered, the flight starting point and direction of UAVs are set, and the covered flight is carried out. Under the premise of not missing the operation area, the repetitive covering path is less, the effective flight path is longer, and the energy loss is less. In order to facilitate the research, the problem is simplified reasonably. The terrain of the area to be covered is flat, regardless of the relief changes. The height of the UAV is unchanged during operation, that is, the fixed height flight. For a single drone and the area it is responsible for covering, we plan to use the classic network in deep learning, the ResNet convolutional neural network, to select and optimize the track. ResNet, a full-name residual network, is a deep convolutional neural network (CNN) architecture originally proposed by Kaiming He et al. in the 2015 paper “Deep Residual Learning for Image Recognition”. This architecture has made revolutionary progress in solving the problem of deep neural network training, especially when dealing with intense networks; it can effectively avoid the problem of gradient vanishing or gradient explosion, allowing the network to improve accuracy by adding more layers without falling into the dilemma of performance degradation. The core idea of ResNet is to introduce residual learning. In traditional deep networks, features are directly transmitted between layers. At the same time, ResNet adds “skip connections” (also called “short-circuit connections” or “identity mapping”) so that the output of a particular layer is not only passed to the next layer but may jump several layers before passing. This means that when the network learns, it does not directly learn the output of each layer but learns the residual between the input and output, that is, the difference between the target mapping and the input. If the network layers can copy the input directly to the output, these layers can learn an identity mapping that keeps the input unchanged. This way, even if the network is deep, the gradient can be propagated more efficiently through these direct connections.
ResNet has many variants. Depending on the number of layers, the common ones are ResNet-18, ResNet-34, ResNet-50, ResNet-101, and ResNet-152. Considering both performance and speed, this article uses the ResNet-50 model, which introduces a “bottleneck” design. Each residual unit contains three layers of convolution (1 × 1, 3 × 3, 1 × 1 convolution), where 1 × 1 convolution is used for dimensionality reduction and dimensionality increase, and 3 × 3 convolution is responsible for processing features. This design reduces parameters while maintaining network performance. The introduction of ResNet has extensively promoted the development of deep learning, and it has set new performance standards in many tasks, such as image classification, object detection, and semantic segmentation. The design concept of ResNet also inspired the development of many subsequent network architectures, such as DenseNet and MobileNet. These networks further optimized the computational efficiency and the number of parameters while maintaining or improving performance. ResNet solves the problem of difficult deep network training through its innovative residual learning mechanism, enabling the network to improve its learning ability by deepening the network depth without falling into overfitting and opening the door for deep learning to develop deeper networks. ResNet achieved excellent performance in multiple computer vision tasks and provided valuable inspiration for the design of subsequent deep learning models. Its influence runs through all aspects of deep learning and has become a milestone in the history of deep learning.
A series of convolution, pooling, and activation layer operations is conducted. The specific complete operations are shown in Table 1 below.

Table 1.
Specific operation table of various ResNet structures.
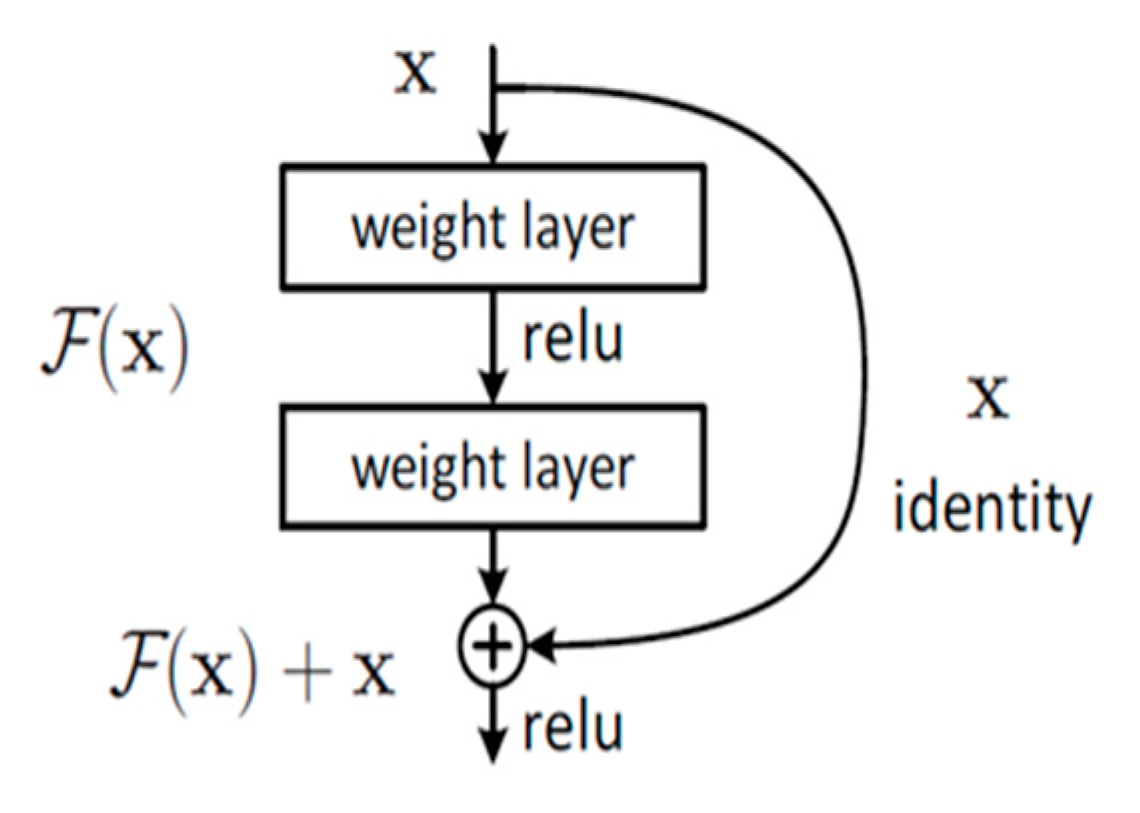
Table 1 clearly shows the ResNet structures of various sizes, where each layer contains the residual structure shown in Figure 2; that is, after the input variable is operated by the weight layer, the new value is added to the initial input value to obtain the new value as the input of the next layer. This operation cleverly integrates the initial information, making the model more feature-rich and providing higher performance for downstream tasks.
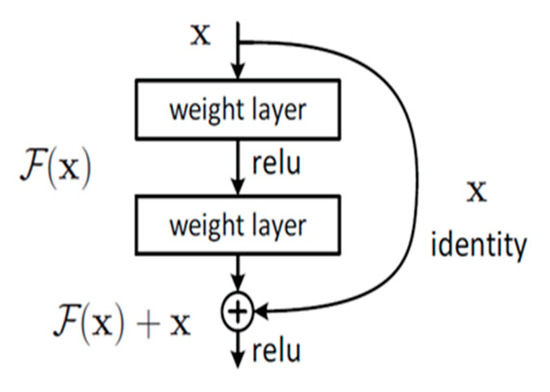
Figure 2.
Schematic diagram of residual structure.
The principle of the residual structure can be expressed explicitly as Equation (2).
where x represents the input of this layer, and F(x) represents the result after its operation. Ultimately, the output of this layer equals the initial input plus the result of its operation. Figure 2 shows that after a series of layer operations, the final step is a fully connected layer, whose core function is to perform dimensionality mapping of features to obtain the required dimensional information. This is illustrated explicitly in Equation (3).
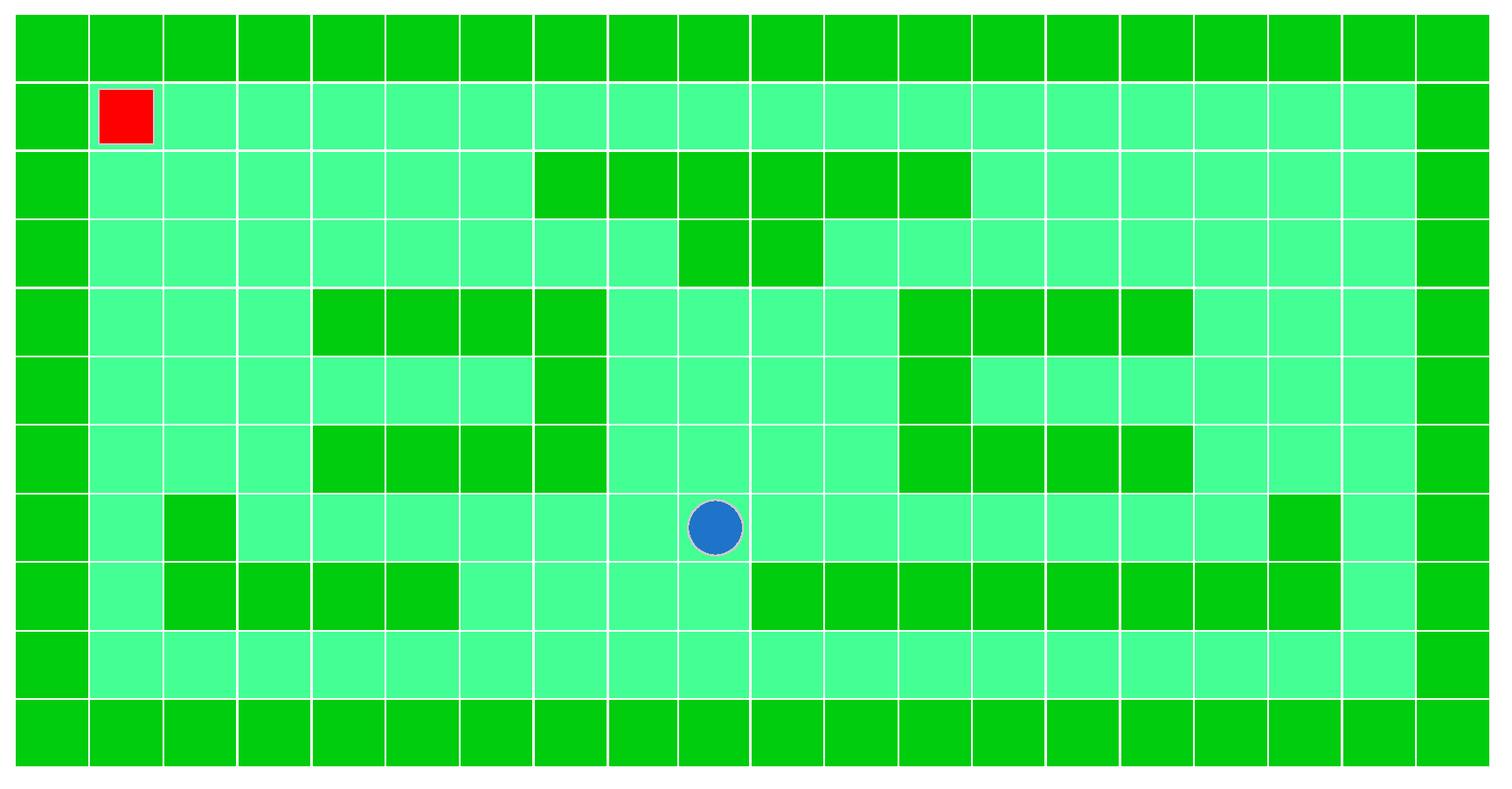
where x represents the input to the fully connected layer, and y represents the output of the fully connected layer. Essentially, the computational process involves the weighted summation of trainable parameters, fundamentally the operational mechanism of a multilayer perceptron. In this context, the output dimension is 4, representing the four possible flight states of the drone at the current time step, namely up, down, left, and right. Based on the principle of the raster diagram method, Pygame was used to build the UAV area coverage simulation platform, and the effect is shown in Figure 3. Light green indicates uncovered areas, dark green indicates covered areas, red in the upper left corner indicates the starting point, and blue means the drone’s current location. The following diagrams have the same meaning as the current ones.
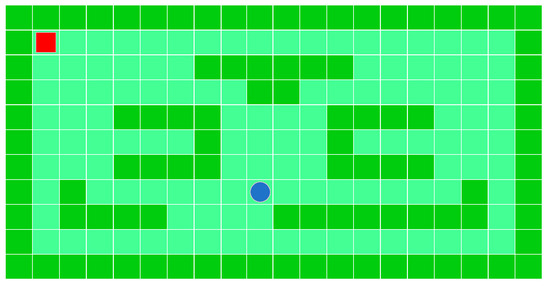
Figure 3.
Schematic diagram of drone flight selection.
Based on the above ResNet50 model, the drone’s trajectory direction selection at each step can be gradually derived. The whole optimized trajectory algorithm can be described as the following Algorithm 1.
| Algorithm 1: Pseudocode of Trajectory Optimization Algorithm |
| Input: number of iterations , state set , action set , step size , discount factor , exploration rate , network, batch size in batch gradient descent. Output: network parameters 1. Randomly initialize the network parameters , initialize the value for all state-action pairs based on , and clear the experience replay memory 2. For to do Initialize state and extract its feature vector . Repeat Input into the network, output the values for each action, and select action using an strategy. Execute action to update the environment, obtaining the feature vector of the new state and the immediate reward . Store the tuple , in the experience replay memory . compute the target values . Until |
3.3. Trajectory Optimization Algorithm Integrating CSAM
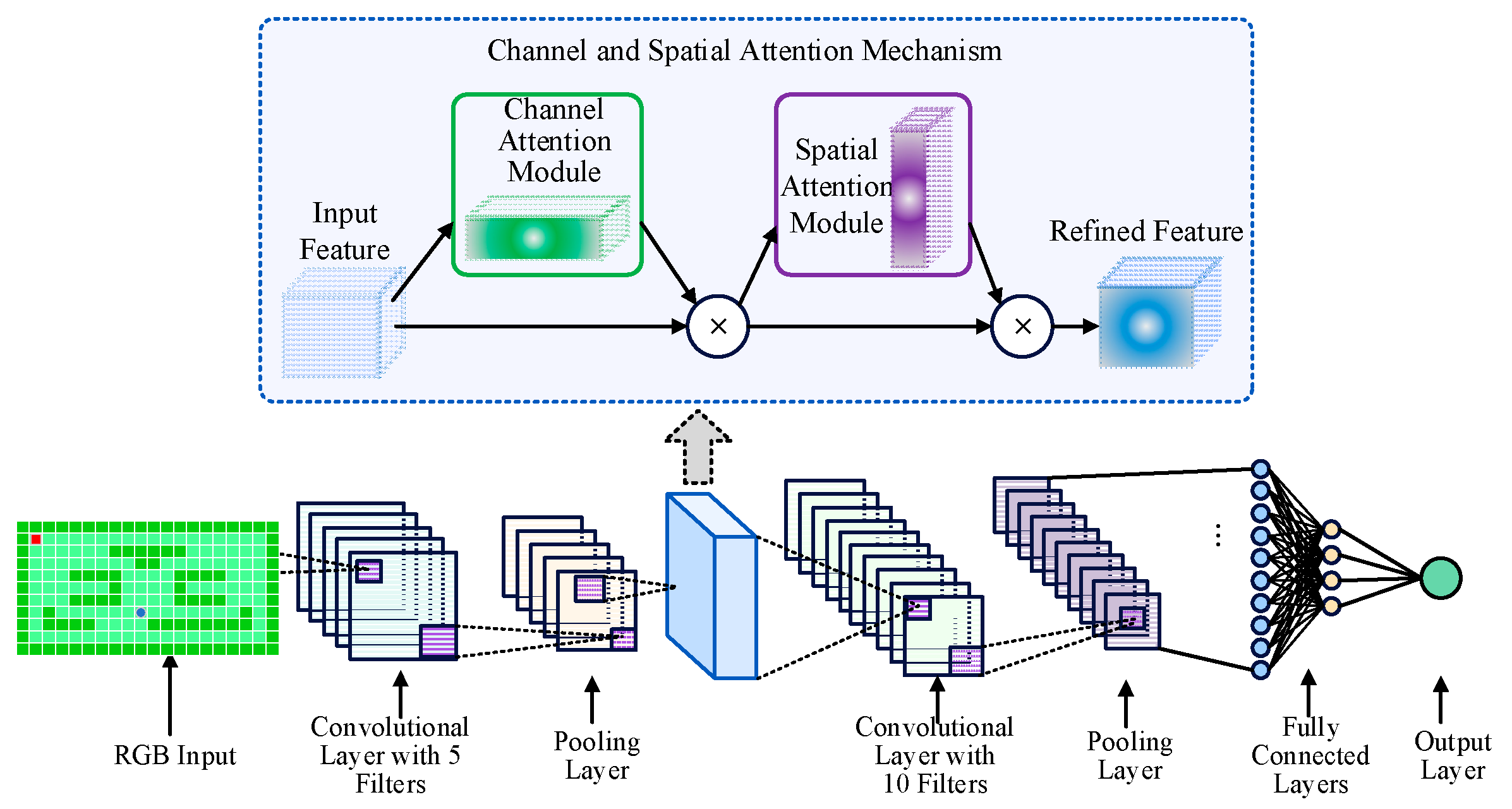
Based on the above ResNet50 and CSAM, the network structure with the integrated spatial channel attention mechanism is shown in Figure 4. By integrating CSAM into the architecture of ResNet50, the model’s perception of critical features in the image is further improved. As a lightweight attention module, CSAM successively pays attention to the channel and spatial dimensions of the feature map, thereby achieving more fine-grained feature rescaling. First, the channel attention mechanism evaluates the importance of each channel. It adjusts the feature response of the channel accordingly, highlighting the feature channels that are more important to the current task. Subsequently, the spatial attention mechanism identifies and emphasizes important spatial regions in the image, allowing the network to focus on processing information in these regions. This sequential processing attention mechanism optimizes the representation of features so that ResNet50 integrated with CSAM shows higher accuracy and efficiency in track classification selection. By carefully rescaling the channel and spatial information of the feature map, ResNet integrated with CSAM can more effectively utilize the expressive power of the deep network while maintaining the original advantages of ResNet, such as easy training and good generalization ability. This network model that combines deep residual learning and fine-grained attention mechanism shows the great potential of the method designed in this paper in solving trajectory optimization tasks.
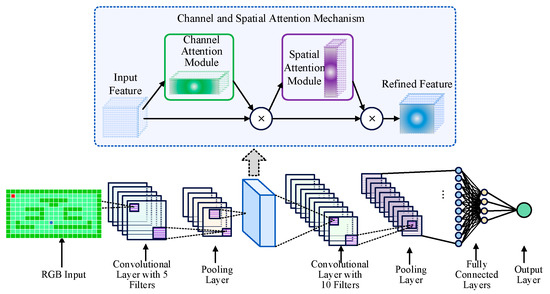
Figure 4.
Network structure integrating CSAM.
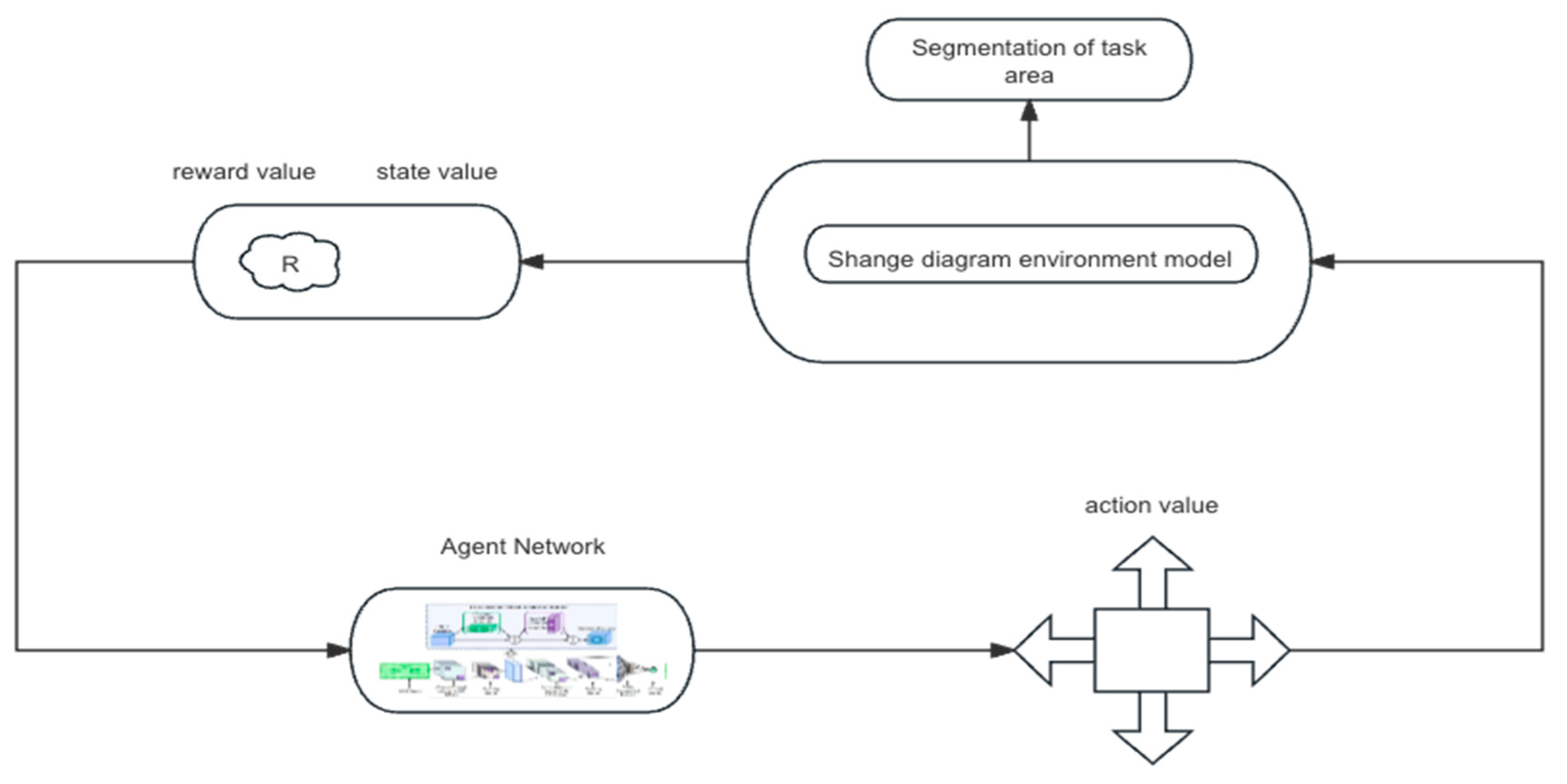
Based on the network model in Figure 4, the reinforcement learning strategy shown in Figure 5 is integrated. Reinforcement learning is a machine learning paradigm that aims to teach agents to take actions in the environment through trial and error to maximize a particular cumulative reward. Based on the interaction with the environment, the agent learns to formulate a strategy, the rule for choosing the best action in a given state. This process involves a balance between exploration (exploring unknown states or actions to gain new knowledge) and exploitation (using known information to obtain the maximum reward). The core components of reinforcement learning include state (the way the agent perceives the environment), action (the actions that the agent can perform), reward (the feedback given to the agent by the environment after performing a specific action), and strategy (the mapping from state to action). During the training process, the agent gradually learns the optimal strategy, that is, those actions that can maximize the cumulative reward in the long run by constantly trying and evaluating the results of different actions. Reinforcement learning applied to the network in this article can accelerate model convergence and improve the performance of trajectory optimization.
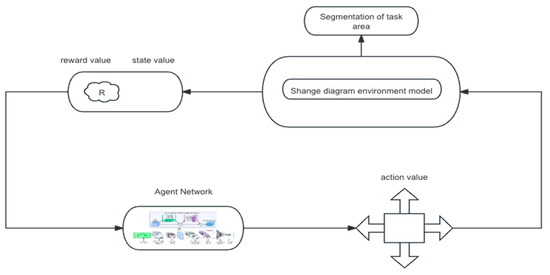
Figure 5.
Schematic diagram of the integrated reinforcement learning strategy.
4. Experiments
4.1. Regional Decomposition
Based on the above regional decomposition algorithm, we conducted simulation experiments, which provided a basis for the trajectory planning of multi-UAV regional coverage and ensured the practicality and reliability of the research results. The above algorithm is implemented by Mathematica8.0 program, and some examples are carried out in a computer system with an Intel(R) Core(TM) CPU i5-2410M@2.30GHz. The results of the instantiation calculation are shown in Figure 6 and Figure 7 below.
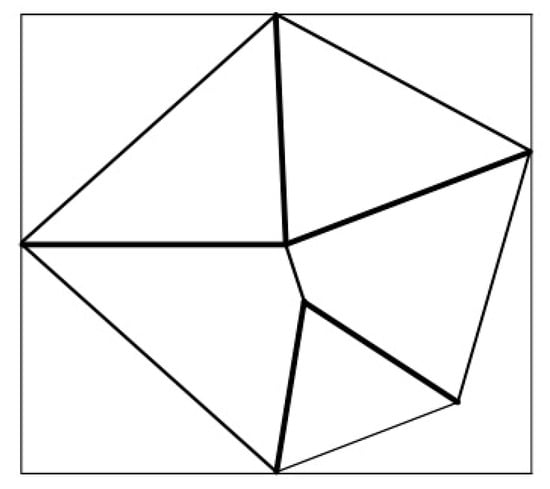
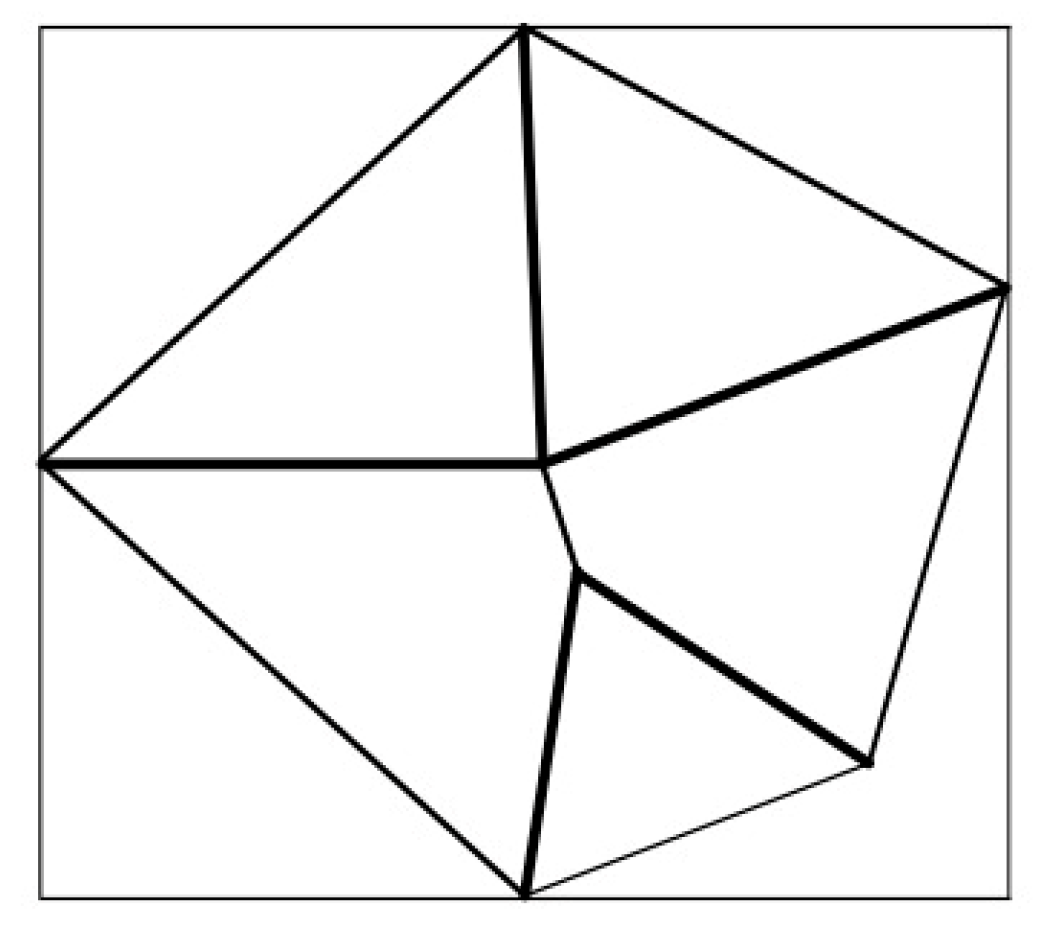
Figure 6.
Schematic diagram of pentagonal area division.
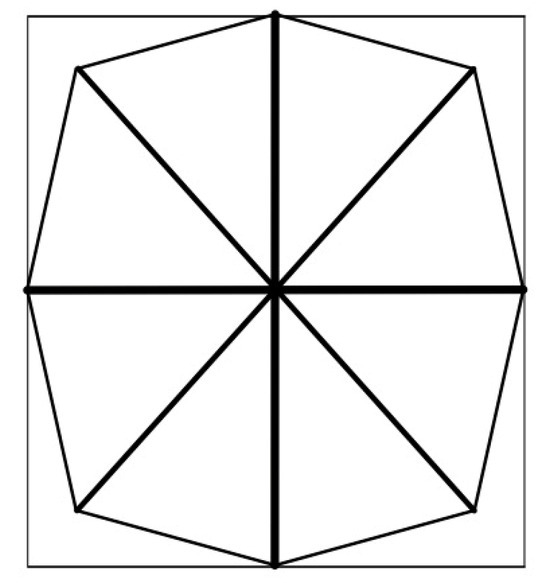
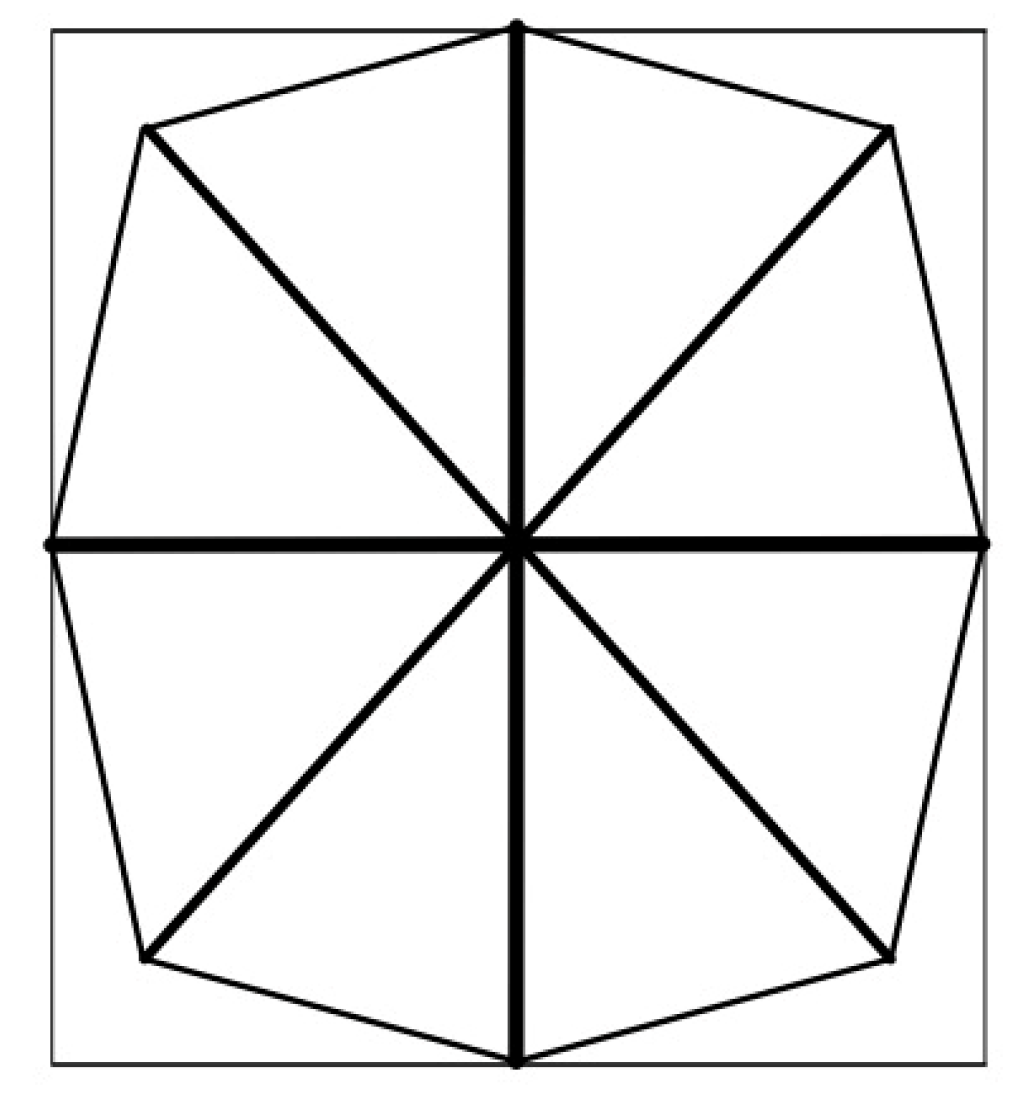
Figure 7.
Schematic diagram of octagonal area division.
Figure 6 shows that a pentagon is given and subdivided in the plane region. The total CPU running time is 2029.05 s, the total number of subdivisions is 3625 times, and the total number of pixels, including the pentagon composed of five plane line segments and their Voronoi diagrams, is 4062.
As shown in Figure 7, an octagon is given and subdivided in the plane area. The total CPU running time is 2971.95 s, the total number of subdivisions is 7265, and the total number of pixels, including the octagon composed of eight plane line segments and their Voronoi diagram, is 8434.
4.2. Route Planning
Based on the above regional decomposition results, the drone is initially located in the grid at the upper left corner of the grid map. We used Pygame to build the UAV area coverage simulation platform. The dark grid at the edge in Figure 3 represents the boundary of the task area, and the UAV can only move within this boundary. The light grid within the remote boundary represents the grid to be covered, and the dark grid represents the stationary obstacle. The cartoon quadcopter drone icon represents the drone performing area coverage. Specify that drones and moving obstacles can only move from the current grid to another adjacent grid at each step. Every time the drone covers a dark grid, the grid turns white, indicating that it has been covered. In the process of area coverage, the environment model program uses the current frame of the simulation platform as the current state value at each step and then converts it into the input of the agent network through appropriate preprocessing.
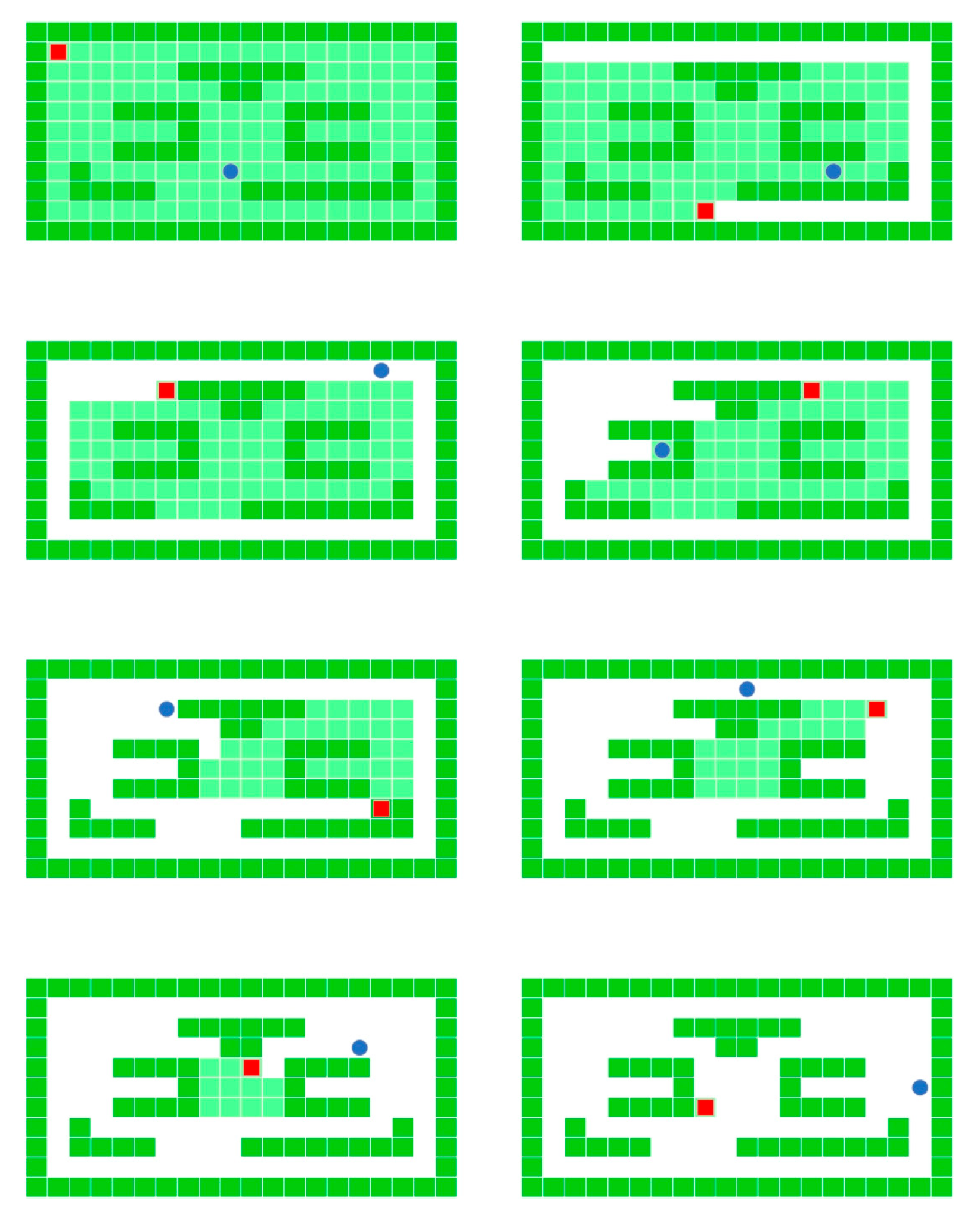
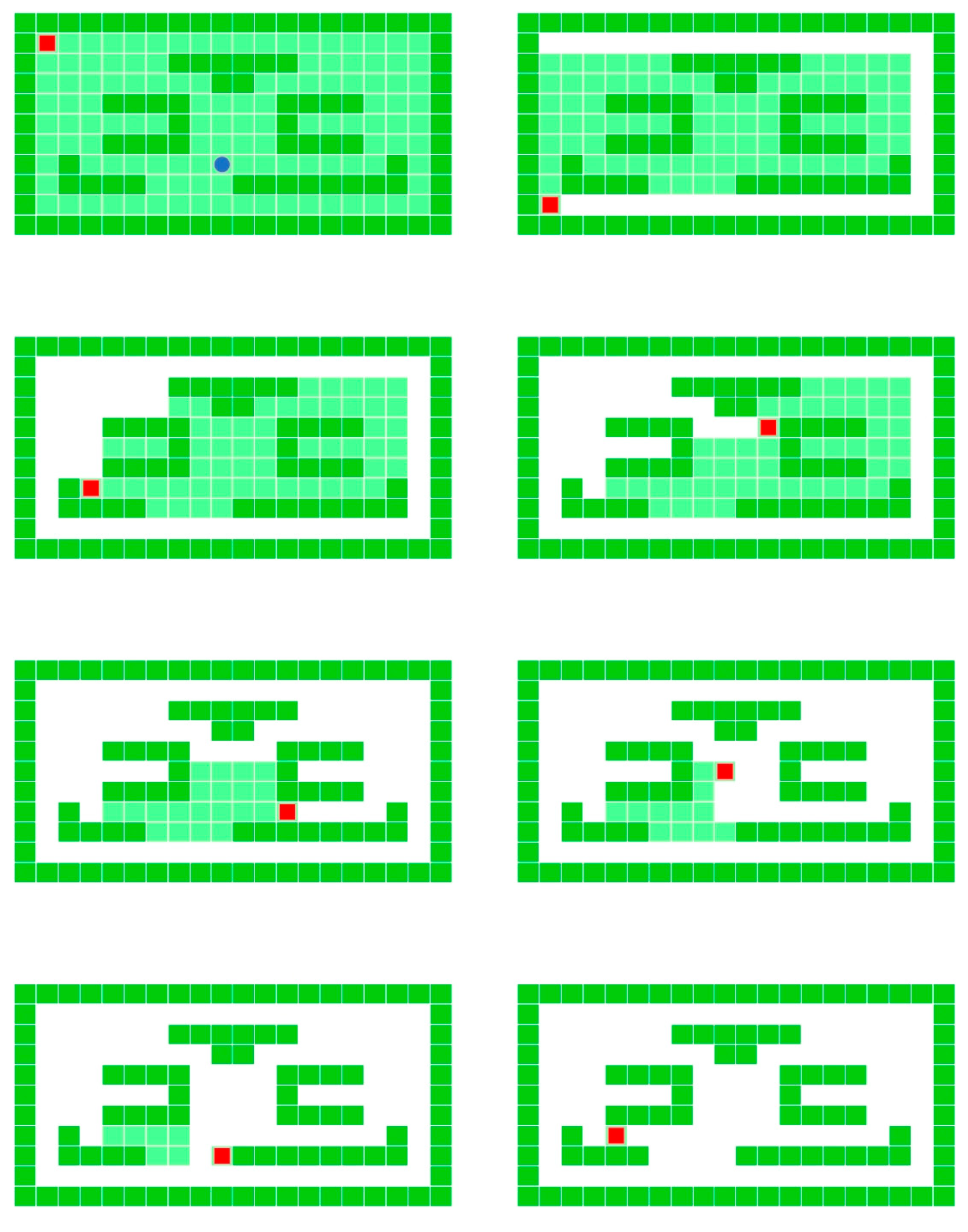
The simulation platform screen was captured multiple times during the experiment. The simulation platform screen was captured multiple times during the experiment, and the final result of the basic trajectory optimization algorithm is shown in Figure 8. The final result of the trajectory optimization algorithm integrating CSAM is shown in Figure 9.
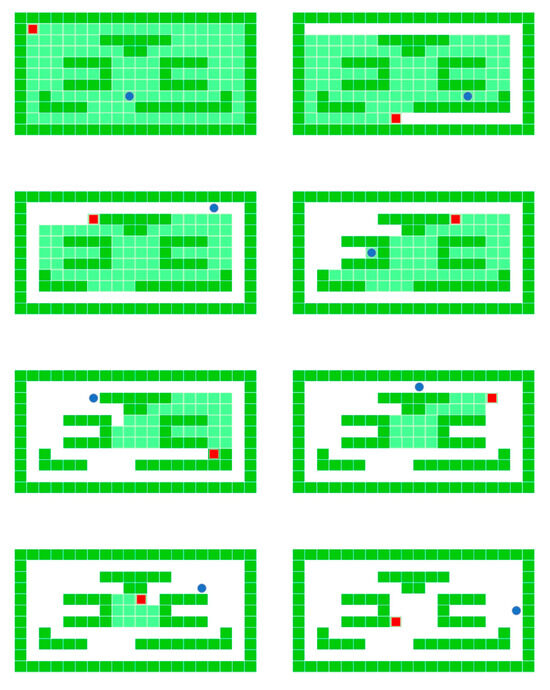
Figure 8.
Visual results of basic optimization algorithm.
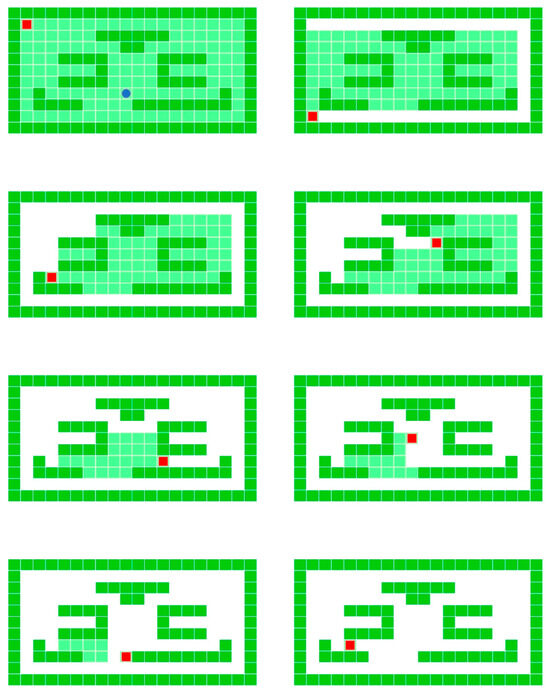
Figure 9.
Visual results of trajectory optimization algorithm integrating CSAM.
We can calculate the path lengths with the algorithm in Algorithm 1. Using the basic ResNet50 model and the model with channel spatial attention mechanism, the average path lengths are 40 km and 36 km, respectively. This means that the path length of the improved model is reduced by 10%, greatly improving efficiency.
This study delves into the problem of drone trajectory optimization, initially employing the basic ResNet50 model. Building on this foundation, we integrated a CSAM and reinforcement learning strategies. The enhanced model demonstrated a substantial performance improvement, achieving a path length reduction of approximately 10%. These results underscore the effectiveness and superiority of the proposed method, highlighting its potential for advancing drone trajectory optimization.
5. Conclusions
This paper aims to address the multi-UAV trajectory optimization problem. First, it used the regional decomposition method based on the Voronoi diagram to transform it into a single-UAV trajectory optimization problem. Then, it improved the basic ResNet50 model and integrated CSAM and reinforcement learning strategies to reduce the average path length by 10%, significantly improving the performance. A regional decomposition method based on the Voronoi diagram was designed to transform the multi-center regional decomposition problem into a single-center regional decomposition problem so that the deep learning method can be used for single-target trajectory classification optimization and the complexity of the problem is reduced. Then, a deep learning model integrating the channel and spatial attention mechanism (CSAM) was designed, and the reinforcement learning training strategy was used to significantly improve the model’s performance. Finally, the problem of UAV and UAV regional coverage was analyzed and studied from the perspective of policies and regulations, and policy recommendations were provided.
The method in this paper has achieved excellent performance in multi-UAV path coverage tasks and has broad application prospects. However, the method in this paper is divided into two stages: region segmentation and path optimization. These stages do not achieve a unified and complete network structure, but it is a direction worthy of further research and improvement.
Author Contributions
Conceptualization, methodology, validation, R.W.; formal analysis, investigation, resources, data curation, writing, J.W. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Tianjin Applied Basic Research Multi-input Fund, grant number 21JCQNJC00790 and National Natural Science Foundation of China (No. 72301278), the Nature Foundation Matching Program (No. 3122024PT29).
Data Availability Statement
The data presented in this study are available on request from the corresponding author. The data are not publicly available due to commercial use.
Acknowledgments
I would like to express my gratitude to all those who helped me during the process of researching and writing my thesis. Thanks to Tianjin Applied Basic Research Multi-input Fund (21JCQNJC00790) for their help in funding and materials.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Guo, X.H. Value of Unmanned Aerial Photography Measurement in Geological Environmental Investigation of Mining Areas. Low Carbon World 2020, 10, 59–60. [Google Scholar] [CrossRef]
- Chen, Z.H.; Hu, C.H. Multi-drone target allocation auction algorithm based on dqn bidding strategy. J. Liaocheng Univ. 2024, 37, 23–32. [Google Scholar] [CrossRef]
- Causa, F.; Fasano, G.; Grassi, M. Multi-UAV path planning for autonomous missions in mixed GNSS coverage scenarios. Sensors 2018, 18, 4188. [Google Scholar] [CrossRef] [PubMed]
- Chen, J.; Du, C.; Lu, X.; Chen, K. Multi-region coverage path planning for heterogeneous unmanned aerial vehicles systems. In Proceedings of the 2019 IEEE International Conference on Service-Oriented System Engineering (SOSE), San Francisco, CA, USA, 4–9 April 2019; pp. 356–3565. [Google Scholar]
- Liao, C.C. Research on Multi-UAVs Cooperative Ground Mission Planning Method. Master’s Thesis, Sichuan University, Chengdu, China, 2021. [Google Scholar]
- Xu, R.F. Analysis of the media application value of drone aerial photography. Audio Vis. World 2019, 6, 119–121. [Google Scholar] [CrossRef]
- Zhao, C.; Liu, J.; Sheng, M.; Teng, W.; Zheng, Y.; Li, J. Multi-UAV trajectory planning for energy-efficient content coverage: A decentralized learning-based approach. IEEE J. Sel. Areas Commun. 2021, 39, 3193–3207. [Google Scholar] [CrossRef]
- Li, J.; Li, X.; Yu, L. Multi-UAV cooperative coverage path planning in plateau and mountain environment. In Proceedings of the 2018 33rd Youth Academic Annual Conference of Chinese Association of Automation (YAC), Nanjing, China, 18–20 May 2018; pp. 820–824. [Google Scholar]
- Muñoz, J.; López, B.; Quevedo, F.; Monje, C.A.; Garrido, S.; Moreno, L.E. Multi UAV coverage path planning in urban environments. Sensors 2021, 21, 7365. [Google Scholar] [CrossRef]
- Cong, R. Research on Multi-UAV Mission Planning Method for Detection Mission. Master’s Thesis, Tianjin University, Tianjin, China, 2021. [Google Scholar]
- Wang, Z.T. Research on Formation Control Technology for Multi-Drone Network Area Coverage. Master’s Thesis, Nanjing University of Posts and Telecommunications, Nanjing, China, 2023. [Google Scholar]
- Xiang, B. Research on Trajectory Planning Method for Multi-Drone Cooperative Detection. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2021. [Google Scholar]
- Yu, H. Research on Collaborative Decision-Making Strategies for Multi-Drone Operations. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2020. [Google Scholar]
- Latombe, J.C. Robot Motion Planning; Springer: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Stentz, A. Optimal and efficient path planning for partially-known environments. In Proceedings of the 1994 IEEE International Conference on Robotics and Automation, San Diego, CA, USA, 8–13 May 1994; pp. 3310–3317. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Rob. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Saeed, R.A.; Omri, M.; Abdel-Khalek, S.; Ali, E.S.; Alotaibi, M.F. Optimal path planning for drones based on swarm intelligence algorithm. Neural Comput. Appl. 2022, 34, 10133–10155. [Google Scholar] [CrossRef]
- Zhou, X.; Gao, F.; Fang, X.; Lan, Z. Improved bat algorithm for UAV path planning in three-dimensional space. IEEE Access 2021, 9, 20100–20116. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, X.; Jia, S.; Li, X. A novel phase angle-encoded fruit fly optimization algorithm with mutation adaptation mechanism applied to UAV path planning. Appl. Soft Comput. 2018, 70, 371–388. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, J.; Du, C. Path planning of UAVs based on improved ant colony system. In Proceedings of the 2020 IEEE International Conference on Progress in Informatics and Computing (PIC), Shanghai, China, 18–20 December 2020; pp. 396–400. [Google Scholar]
- Lin, S.; Li, F.; Li, X.; Jia, K.; Zhang, X. Improved artificial bee colony algorithm based on multi-strategy synthesis for UAV path planning. IEEE Access 2022, 10, 119269–119282. [Google Scholar] [CrossRef]
- Yang, Q.; Liu, J.; Li, L. Path planning of UAVs under dynamic environment based on a hierarchical recursive multiagent genetic algorithm. In Proceedings of the 2020 IEEE Congress on Evolutionary Computation (CEC), Glasgow, UK, 19–24 July 2020; pp. 1–8. [Google Scholar]
- Pehlivanoglu, Y.V.; Pehlivanoglu, P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems. Appl. Soft Comput. 2021, 112, 107796. [Google Scholar] [CrossRef]
- Hu, J.; Wang, C.; Sun, H. UAV Path Planning Based on Adaptive NSGA-II Algorithm. IEEE Trans. Ind. Electron. 2016, 63, 1235–1243. [Google Scholar]
- Sun, X.Y.; Yi, J.K. Particle swarm optimization hybrid algorithm for UAV 3D path planning. Telecommun. Eng. 2023, 63, 335–341. [Google Scholar] [CrossRef]
- Wang, X.; Meng, X. UAV online path planning based on improved genetic algorithm. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 4101–4106. [Google Scholar]
- Hang, B.; Ren, J.R.; Yao, Y. Robust Docking Control for Probe-Drogue Refueling Based on Adaptive Neural Network Dynamic Surface. Available online: https://d197for5662m48.cloudfront.net/documents/publicationstatus/128395/preprint_pdf/a19e6c01129081f732c41a8e82244d1a.pdf (accessed on 11 August 2024).
- Wu, K.; Wang, H.; Esfahani, M.A.; Yuan, S. Achieving real-time path planning in unknown environments through deep neural networks. IEEE Trans. Intell. Transp. Syst. 2020, 23, 2093–2102. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, H.; Wen, J.; Lun, Y.; Wu, J. Obstacle avoidance of UAV based on neural networks and interfered fluid dynamical system. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 1066–1071. [Google Scholar]
- Amer, K.; Samy, M.; Shaker, M.; Elhelw, M. Deep convolutional neural network based autonomous drone navigation. In Proceedings of the Thirteenth International Conference on Machine Vision, Rome, Italy, 4 January 2021; pp. 16–24. [Google Scholar]
- Wei, Q.; Liu, D. Neural-network-based adaptive optimal tracking control scheme for discrete-time nonlinear systems with approximation errors. Neurocomputing 2015, 149, 106–115. [Google Scholar] [CrossRef]
- Zhao, S.; Li, J.; Huo, Q. Removing ring artifacts in CBCT images via generative adversarial network. In Proceedings of the 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, AB, Canada, 15–20 April 2018; pp. 1055–1059. [Google Scholar]
- Kothari, M.; Postlethwaite, I.; Gu, D.-W. Multi-UAV path planning in obstacle rich environments using rapidly-exploring random trees. In Proceedings of the 48h IEEE Conference on Decision and Control (CDC) held jointly with 2009 28th Chinese Control Conference, Shanghai, China, 15–18 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 3069–3074. [Google Scholar] [CrossRef]
- Chen, K.; Liu, Y.; Wang, Z. A Multi-UAV path planning algorithm based on improved genetic neural network. In Proceedings of the 2020 IEEE International Conference, Online, 7–11 June 2020. [Google Scholar]
- Theile, M.; Bayerlein, H.; Nai, R.; Gesbert, D.; Caccamo, M. UAV path planning using global and local map information with deep reinforcement learning. In Proceedings of the 2021 20th International Conference on Advanced Robotics (ICAR), Ljubljana, Slovenia, 6–10 December 2021; pp. 539–546. [Google Scholar]
- Li, R.; Fu, L.; Wang, L.; Hu, X. Improved Q-learning based route planning method for UAVs in unknown environment. In Proceedings of the 2019 IEEE 15th International Conference on Control and Automation (ICCA), Edinburgh, UK, 16–19 July 2019; pp. 118–123. [Google Scholar]
- Hu, Z.; Gao, X.; Kaifang, W.; Zhai, Y.; Wang, Q. Relevant experience learning: A deep reinforcement learning method for UAV autonomous motion planning in complex unknown environments. Chin. J. Aeronaut. 2021, 34, 187–204. [Google Scholar] [CrossRef]
- Ma, B.; Liu, Z.; Jiang, F.; Zhao, W.; Dang, Q.; Wang, X.; Zhang, J.; Wang, L. Reinforcement learning based UAV formation control in GPS-denied environment. Chin. J. Aeronaut. 2023, 36, 281–296. [Google Scholar] [CrossRef]
- Chen, Y.J.; Chang, D.K.; Zhang, C. Autonomous tracking using a swarm of UAVs: A constrained multi-agent reinforcement learning approach. IEEE Trans. Veh. Technol. 2020, 69, 13702–13717. [Google Scholar] [CrossRef]
- Tong, G.; Jiang, N.; Biyue, L.; Xi, Z.; Ya, W.; Wenbo, D. UAV navigation in high dynamic environments: A deep reinforcement learning approach. Chin. J. Aeronaut. 2021, 34, 479–489. [Google Scholar] [CrossRef]
- Zha, D. Path planning algorithm for unmanned aerial vehicle area coverage based on multi-agent reinforcement learning. J. Mech. Eng. 2019, 55, 153–161. [Google Scholar]
- Chen, W. Path generation method for unmanned aerial vehicle area coverage based on deep reinforcement learning. Acta Aeronaut. Astronaut. Sin. 2018, 39, 1421–1430. [Google Scholar]
- Zhang, Z. Research on reinforcement learning algorithm for path planning in unmanned aerial vehicle area coverage task. Aviat. Manuf. Technol. 2020, 54, 47–52. [Google Scholar]
- Yang, L.; Qi, J.; Xiao, J.; Yong, X. A literature review of UAV 3D path planning. In Proceedings of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 29 June–4 July 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 2376–2381. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Z.; Xia, M.; Wu, L.; Tian, Y.; Chen, Y. Path planning for UAV communication networks: Related technologies, solutions, and opportunities. ACM Comput. Surv. 2023, 55, 1–37. [Google Scholar] [CrossRef]
- Semsch, E.; Jakob, M.; Pavlicek, D.; Pechoucek, M. Autonomous UAV surveillance in complex urban environments. In Proceedings of the 2009 IEEE/WIC/ACM International Joint Conference on Web Intelligence and Intelligent Agent Technology, Milan, Italy, 15–18 September 2009; IEEE: Piscataway, NJ, USA, 2009; Volume 2, pp. 82–85. [Google Scholar] [CrossRef]
- Cecil, J. A conceptual framework for supporting UAV based cyber physical weather monitoring activities. In Proceedings of the 2018 Annual IEEE International Systems Conference (SysCon), Vancouver, BC, Canada, 23–26 April 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–8. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).