
Modeling and Multi-Objective Optimization Design of High-Speed on/off Valve System


Abstract
:1. Introduction
2. New High-Speed on/off Valve Structure and System Modeling
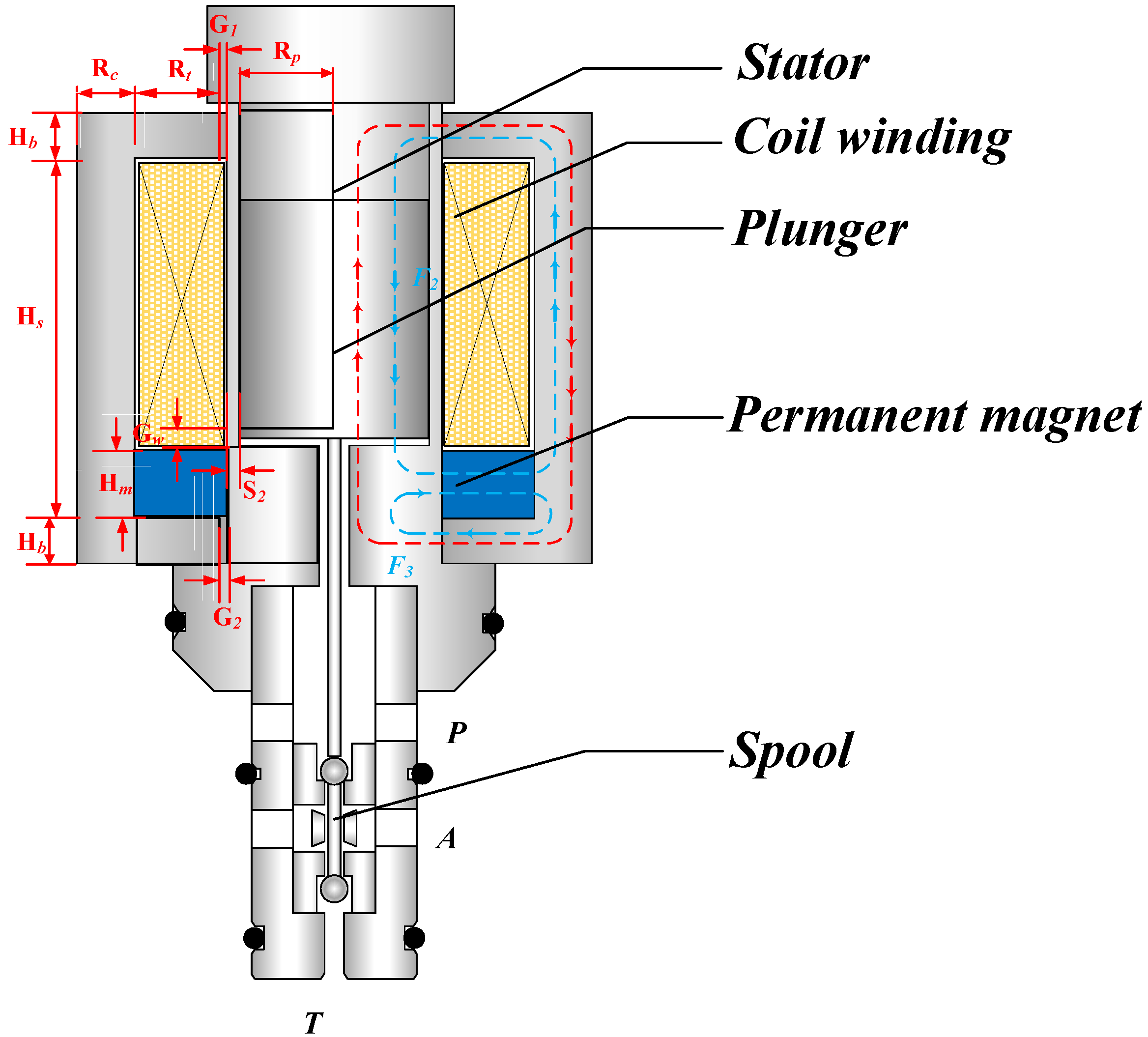
2.1. New High-Speed on/off Valve Structure
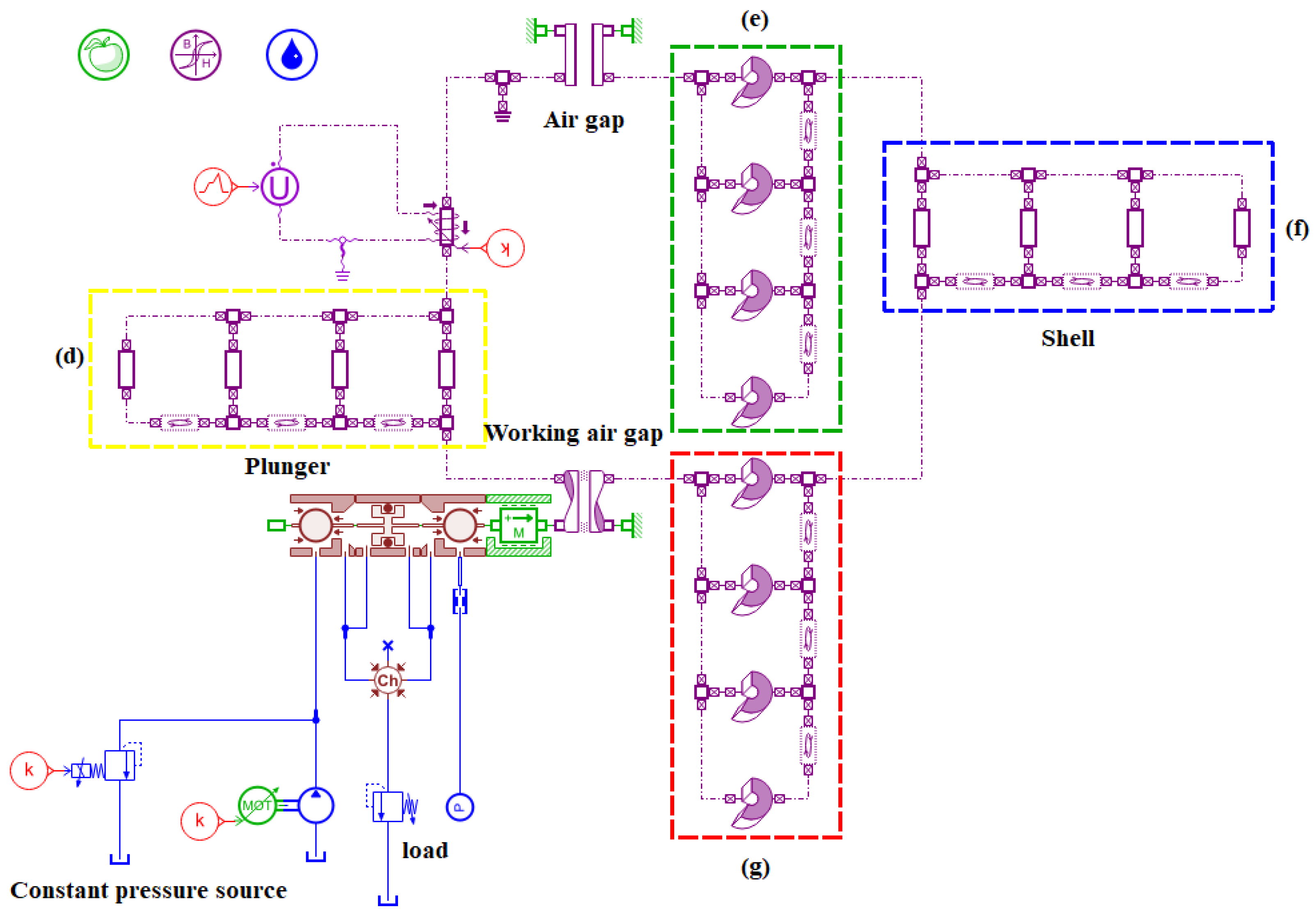
2.2. System Dynamic Modeling
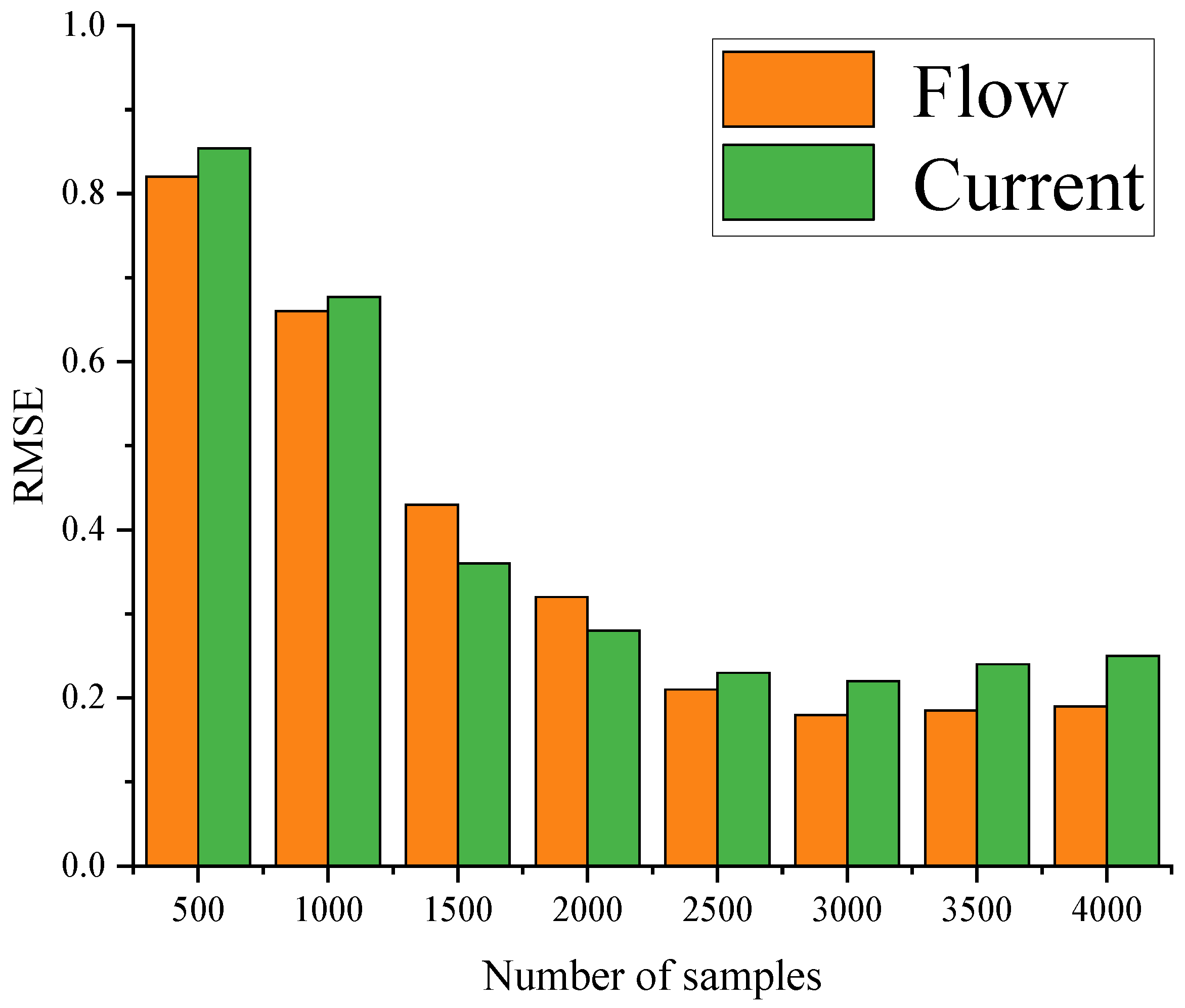
3. Construction of the BPNN Model
4. Utilizing AFSA for Multi-Objective Optimization Design Based on HSV
4.1. Artificial Fish Swarm Algorithm (AFSA)
4.2. Objective Functions for Multi-Objective Optimization Design
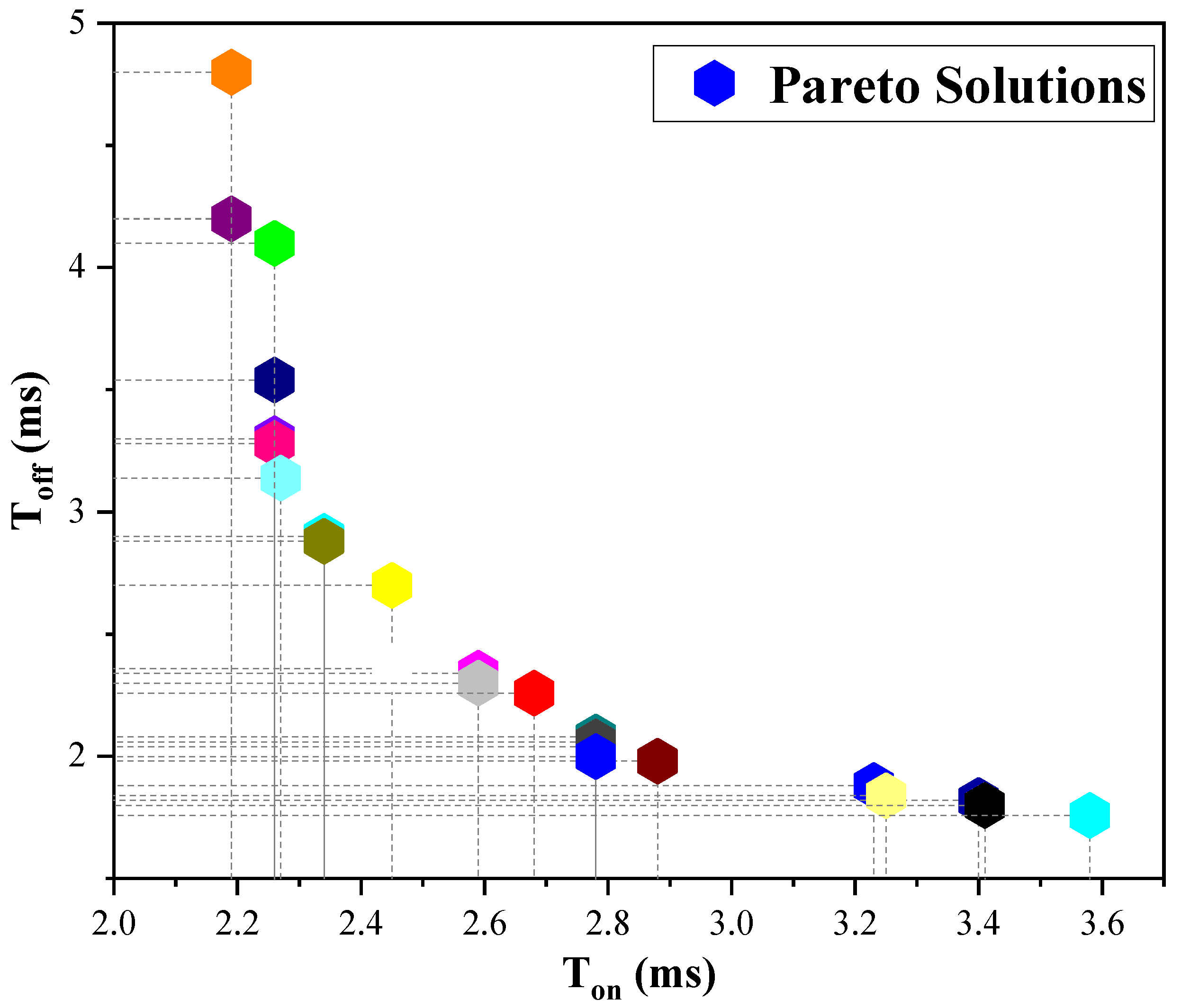
4.3. Optimization Results
5. Prototype and Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Symbol | Description |
| Rp | Diameter of the armature |
| Rt | Width of the magnetic guide ring |
| Rc | Thickness of the outer shell |
| Ht | Thickness of the upper magnetic guide ring |
| Hb | Thickness of the lower magnetic guide ring |
| G1 | Thickness of the upper nonworking air gap |
| G2 | Thickness of the lower nonworking air gap |
| Gw | Thickness of the working air gap |
| M | Mass of the moving components |
| x | Displacement of the spool |
| D | Viscous damping ratio |
| Fe | Electromagnetic force |
| Fe2 | Anti-electromagnetic force |
| PT | Load pressure |
| Pa | Output pressure |
| Fs | Steady state flowforce when the valve is opened |
| Fs2 | Steady state flow force when the valve is closed |
| S | Magnetic circuit cross-sectional area |
| S0 | Cross-sectional area of the main air gap |
| μ0 | Vacuum permeability |
| Magnetic flux | |
| i | Current in coil |
| da | Diameter of ball spool |
| db | Intermediate pin diameter |
| dc | Aperture diameter |
| p1.2 | Inlet and outlet pressure |
| V1,2 | Average flow velocity vectors at the upstream and downstream |
| β1,2 | Momentum correction coefficients at the upstream and downstream |
| ρ | Fluid density |
| q | Flow rate |
References
- Fei, J.; Wu, Z.; Sun, X.; Su, D.; Bao, X. Research on tunnel engineering monitoring technology based on BPNN neural network and MARS machine learning regression algorithm. Neural Comput. Appl. 2021, 33, 239–255. [Google Scholar] [CrossRef]
- Laamanen, M.S.A.; Vilenius, M. Is it time for digital hydraulics. In Proceedings of the Eighth Scandinavian International Conference on Fluid Power, Tampere, Finland, 7–9 May 2003. [Google Scholar]
- Wang, S.; Zhang, B.; Zhong, Q.; Yang, H. Study on control performance of pilot high-speed switching valve. Adv. Mech. Eng. 2017, 9, 1687814017708908. [Google Scholar] [CrossRef]
- Zhang, Q.; Kong, X.; Yu, B.; Ba, K.; Jin, Z.; Kang, Y. Review and development trend of digital hydraulic technology. Appl. Sci. 2020, 10, 579. [Google Scholar] [CrossRef]
- Azzam, I.; Pate, K.; Garcia-Bravo, J.; Breidi, F. Energy savings in hydraulic hybrid transmissions through digital hydraulics technology. Energies 2022, 15, 1348. [Google Scholar] [CrossRef]
- Zhong, Q.; Li, X.; Mao, Y.; Xu, E.; Jia, T.; Li, Y.; Yang, H. Switching Frequency Improvement of a High Speed on/off Valve Based on Pre-excitation Control Algorithm. Chin. J. Mech. Eng. 2024, 37, 88. [Google Scholar] [CrossRef]
- Yue, D.; Li, L.; Wei, L.; Liu, Z.; Liu, C.; Zuo, X. Effects of pulse voltage duration on open–close dynamic characteristics of solenoid screw-In cartridge valves. Processes 2021, 9, 1722. [Google Scholar] [CrossRef]
- Zhang, B.; Zhong, Q.; Ma, J.E.; Hong, H.C.; Bao, H.M.; Shi, Y.; Yang, H.Y. Self-correcting PWM control for dynamic performance preservation in high speed on/off valve. Mechatronics 2018, 55, 141–150. [Google Scholar] [CrossRef]
- Wang, X.J.; Li, W.J.; Li, C.H.; Peng, Y.W. Structure optimization and flow field simulation of plate type high speed on-off valve. J. Cent. South Univ. 2020, 27, 1557–1571. [Google Scholar] [CrossRef]
- Yang, H.; Wang, W.; Lu, K.; Chen, Z. Cavitation reduction of a flapper-nozzle pilot valve using continuous microjets. Int. J. Heat Mass Transf. 2019, 133, 1099–1109. [Google Scholar] [CrossRef]
- Feng, Y.; Xu, T.; Dai, Y. Dynamic optimization method of High-speed solenoid valve parameters. J. Phys. Conf. Ser. 2022, 2296, 012001. [Google Scholar] [CrossRef]
- Yang, S.; Yao, J.; Wang, P.; Zhang, P.; Wei, T.; Li, D. A novel Dual-Magnetic circuit actuated Fast-Switching valve with Multi-Stage excitation control algorithm. Measurement 2024, 230, 114483. [Google Scholar] [CrossRef]
- Chu, Y.; Yuan, Z.; Chang, W. Research on the dynamic erosion wear characteristics of a nozzle flapper pressure servo valve used in aircraft brake system. Math. Probl. Eng. 2020, 2020, 3136412. [Google Scholar] [CrossRef]
- Qingtong, L.; Fanglong, Y.; Songlin, N.; Ruidong, H.; Hui, J. Multi-objective optimization of high-speed on-off valve based on surrogate model for water hydraulic manipulators. Fusion Eng. Des. 2021, 173, 112949. [Google Scholar] [CrossRef]
- Madsen, E.L.; Jørgensen, J.M.; Nørgård, C.; Bech, M.M. Design optimization of moving magnet actuated valves for digital displacement machines. In Fluid Power Systems Technology; American Society of Mechanical Engineers: New York, NY, USA, 2017; Volume 58332, p. V001T01A026. [Google Scholar]
- Abdel-Basset, M.; Abdel-Fatah, L.; Sangaiah, A.K. Metaheuristic algorithms: A comprehensive review. In Computational Intelligence for Multimedia Big Data on the Cloud with Engineering Applications; Elsevier: New York, NY, USA, 2018; pp. 185–231. [Google Scholar]
- Zhong, C.; Li, G.; Meng, Z. Beluga whale optimization: A novel nature-inspired metaheuristic algorithm. Knowl.-Based Syst. 2022, 251, 109215. [Google Scholar] [CrossRef]
- Zhao, W.; Wang, L.; Zhang, Z.; Fan, H.; Zhang, J.; Mirjalili, S.; Cao, Q. Electric eel foraging optimization: A new bio-inspired optimizer for engineering applications. Expert Syst. Appl. 2023, 238, 122200. [Google Scholar] [CrossRef]
- Wei, J.; Ju, Y. Research on optimization method for traffic signal control at intersections in smart cities based on adaptive artificial fish swarm algorithm. Heliyon 2024, 10, e30657. [Google Scholar] [CrossRef]
- Yuan, M.; Kan, X.; Chi, C.; Cao, L.; Shu, H.; Fan, Y. An adaptive simulated annealing and artificial fish swarm algorithm for the optimization of multi-depot express delivery vehicle routing. Intell. Data Anal. 2022, 26, 239–256. [Google Scholar] [CrossRef]
- Tang, Q.; Wu, R.; Ji, J.; Liu, J.; Li, Z. Research on illumination optimization of phototherapy LED based on multi-objective artificial fish swarm algorithm. J. Appl. Opt. 2021, 42, 352–359. [Google Scholar]
- Ma, C.; He, R. Green wave traffic control system optimization based on adaptive genetic-artificial fish swarm algorithm. Neural Comput. Appl. 2019, 31, 2073–2083. [Google Scholar] [CrossRef]
- Wu, S.; Zhao, X.; Li, C.; Jiao, Z.; Qu, F. Multiobjective optimization of a hollow plunger type solenoid for high speed on/off valve. IEEE Trans. Ind. Electron. 2017, 65, 3115–3124. [Google Scholar] [CrossRef]
- Li, T.; Zhang, Y.; Liang, Y.; Yang, Y.; Jiao, J. Multiobjective optimization research on the response time of a pneumatic pilot-operated high speed on/off valve. Int. J. Appl. Electromagn. Mech. 2021, 65, 109–127. [Google Scholar] [CrossRef]
- Kassaymeh, S.; Al-Laham, M.; Al-Betar, M.A.; Alweshah, M.; Abdullah, S.; Makhadmeh, S.N. Backpropagation Neural Network optimization and software defect estimation modelling using a hybrid Salp Swarm optimizer-based Simulated Annealing Algorithm. Knowl.-Based Syst. 2022, 244, 108511. [Google Scholar] [CrossRef]
- Li, P.; Zhang, Y. Influence of eddy current on transient characteristics of common rail injector solenoid valve. J. Beijing Inst. Technol. 2015, 24, 26–34. [Google Scholar]
- Wan, L.; Yu, X.; Zeng, X.; Ma, D.; Wang, J.; Meng, Z.; Zhang, H. Performance analysis of the new balance jack of anti-impact ground pressure hydraulic support. Alex. Eng. J. 2023, 62, 157–167. [Google Scholar] [CrossRef]
- Hannan, M.A.; Lipu, M.S.H.; Hussain, A.; Saad, M.H.; Ayob, A. Neural network approach for estimating state of charge of lithium-ion battery using backtracking search algorithm. IEEE Access 2018, 6, 10069–10079. [Google Scholar] [CrossRef]
- Pourpanah, F.; Wang, R.; Lim, C.P.; Wang, X.Z.; Yazdani, D. A review of artificial fish swarm algorithms: Recent advances and applications. Artif. Intell. Rev. 2023, 56, 1867–1903. [Google Scholar] [CrossRef]
- Zhang, H.; Hong, Q.; Shi, X.; He, J. A social tagging recommendation model based on improved artificial fish swarm algorithm and tensor decomposition. In Security with Intelligent Computing and Big-data Services; Springer International Publishing: Cham, Switzerland, 2018; pp. 3–13. [Google Scholar]
- Li, X.L. An optimizing method based on autonomous animats: Fish-swarm algorithm. Syst. Eng.-Theory Pract. 2002, 22, 32–38. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rp (mm) | RT (mm) | Rc (mm) | Hb (mm) | Hm (mm) | Hs (mm) | |
|---|---|---|---|---|---|---|
| Range | [3,10] | [3,6] | [3,10] | [3,10] | [5,20] | [20,50] |
| Item | Model | Range | Remarks |
|---|---|---|---|
| Signal generator | OHR-B00 | 1–10 kHz (±100 Hz) | |
| Pump | - | 0–30 mPa | Max 50 L/min |
| Flow probe | KRACHT TM8 TFC250S | 0–8 L/min | 25 °C |
| Pressure probe | AR-SS-SZJ06 | 0.1~14.0 mPa | |
| Relief valve | DBET-6X/315G24K4 V | 0.1~31.5 mPa | Max 10 L/min |
| Rp (mm) | RT (mm) | Rc (mm) | Hb (mm) | Hm (mm) | Hs (mm) | |
|---|---|---|---|---|---|---|
| Initial | 4.6 | 4.55 | 3.2 | 3.6 | ~ | 36.4 |
| Optimal | 5.3 | 4.2 | 4.1 | 5.5 | 6.5 | 43.1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, Y.; Wang, D.; Shen, Y. Modeling and Multi-Objective Optimization Design of High-Speed on/off Valve System. Appl. Sci. 2024, 14, 7879. https://doi.org/10.3390/app14177879
Ma Y, Wang D, Shen Y. Modeling and Multi-Objective Optimization Design of High-Speed on/off Valve System. Applied Sciences. 2024; 14(17):7879. https://doi.org/10.3390/app14177879
Chicago/Turabian StyleMa, Yexin, Dongjie Wang, and Yang Shen. 2024. "Modeling and Multi-Objective Optimization Design of High-Speed on/off Valve System" Applied Sciences 14, no. 17: 7879. https://doi.org/10.3390/app14177879
APA StyleMa, Y., Wang, D., & Shen, Y. (2024). Modeling and Multi-Objective Optimization Design of High-Speed on/off Valve System. Applied Sciences, 14(17), 7879. https://doi.org/10.3390/app14177879