
Engineering Vehicle Detection Based on Improved YOLOv6


Abstract
:1. Introduction
- Within this research, we combine a Swin Transformer with YOLOv6, specifically optimized for the task of detecting engineering vehicles. The incorporation of the Swin Transformer, with its exceptional global feature extraction and interpretation capabilities, notably boosts the model’s precision in recognizing partially occluded vehicles. This technological integration not only represents a major breakthrough compared to traditional convolutional neural network (CNN) methods but also demonstrates higher detection precision and robustness in diverse operational environments.
- Given the economic challenges associated with data collection and annotation in the field of engineering vehicle detection, we adopt the SimMIM self-supervised learning paradigm to address this issue. Through this strategy, we significantly reduced the reliance on large-scale annotated datasets, thereby alleviating the financial and time costs associated with model training. The results of this study not only confirm that self-supervised learning is capable of maintaining or even elevating the efficacy of detection models without expensive annotation work, but also provide an economically efficient solution for resource-constrained projects and research.
2. Related Work
3. Methods
3.1. Backbone
3.2. Self-Supervised Pre-Training Backbone
3.3. YOLOv6 Algorithm
3.4. Loss Functions
4. Experiments
4.1. Devices, Environments, and Hyperparameters
4.2. Dataset
4.3. Evaluation Metrics
4.4. Experimental Results
4.4.1. Comparison between Different Models
4.4.2. Contrasting Various Backbone Architectures
4.4.3. Comparing Different Pre-Training Weights
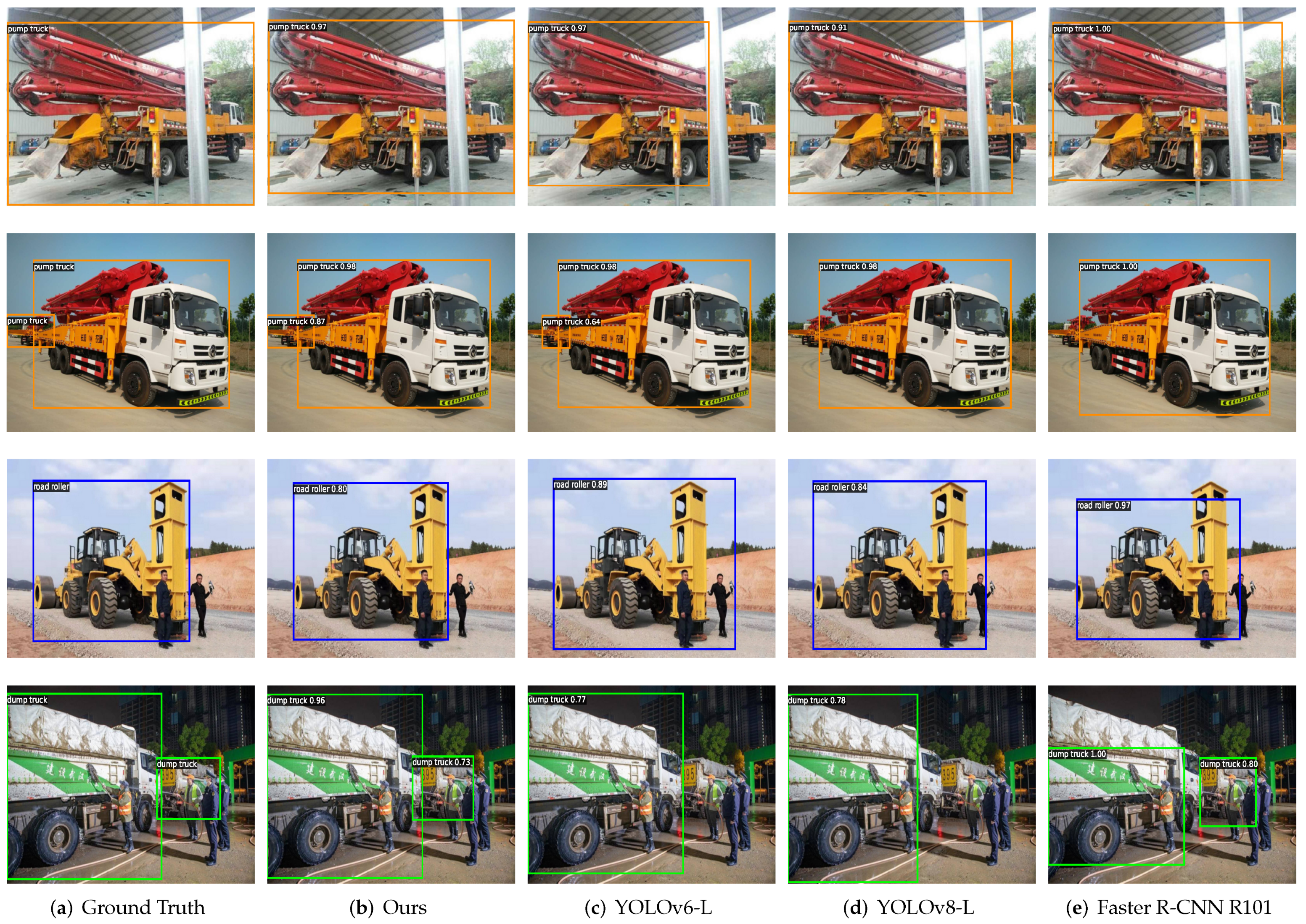
4.4.4. Comparison of Examples
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zheng, Z.; Wang, F.; Gong, G.; Yang, H.; Han, D. Intelligent technologies for construction machinery using data-driven methods. Autom. Constr. 2023, 147, 104711. [Google Scholar] [CrossRef]
- Guo, Y.; Xu, Y.; Niu, J.; Li, S. Anchor-free arbitrary-oriented construction vehicle detection with orientation-aware Gaussian heatmap. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 907–919. [Google Scholar] [CrossRef]
- Fang, W.; Ding, L.; Love, P.E.; Luo, H.; Li, H.; Pena-Mora, F.; Zhong, B.; Zhou, C. Computer vision applications in construction safety assurance. Autom. Constr. 2020, 110, 103013. [Google Scholar] [CrossRef]
- Xiang, X.; Meng, F.; Lv, N.; Yin, H. Engineering vehicles detection for warehouse surveillance system based on modified YOLOv4-Tiny. Neural Process. Lett. 2023, 55, 2743–2759. [Google Scholar] [CrossRef]
- Li, C.; Li, L.; Jiang, H.; Weng, K.; Geng, Y.; Li, L.; Ke, Z.; Li, Q.; Cheng, M.; Nie, W.; et al. YOLOv6: A single-stage object detection framework for industrial applications. arXiv 2022, arXiv:2209.02976. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 10012–10022. [Google Scholar]
- Xie, Z.; Zhang, Z.; Cao, Y.; Lin, Y.; Bao, J.; Yao, Z.; Dai, Q.; Hu, H. Simmim: A simple framework for masked image modeling. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 19–24 June 2022; pp. 9653–9663. [Google Scholar]
- Viola, P.; Jones, M.J. Robust real-time face detection. Int. J. Comput. Vis. 2004, 57, 137–154. [Google Scholar] [CrossRef]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Felzenszwalb, P.F.; Girshick, R.B.; McAllester, D.; Ramanan, D. Object Detection with Discriminatively Trained Part-Based Models. IEEE Trans. Pattern Anal. Mach. Intell. 2010, 32, 1627–1645. [Google Scholar] [CrossRef] [PubMed]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 580–587. [Google Scholar]
- Girshick, R. Fast r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Santiago, Chile, 7–13 December 2015; pp. 1440–1448. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2016, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6154–6162. [Google Scholar]
- Dai, J.; Li, Y.; He, K.; Sun, J. R-fcn: Object detection via region-based fully convolutional networks. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 379–387. [Google Scholar]
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Ultralytics. YOLOv5, V7.0; Ultralytics: Los Angeles, CA, USA, 2022. Available online: https://github.com/ultralytics/yolov5 (accessed on 2 August 2024).
- Wang, C.Y.; Bochkovskiy, A.; Liao, H.Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 18–23 June 2023; pp. 7464–7475. [Google Scholar]
- Ultralytics. YOLO by Ultralytics. 2023. Available online: https://github.com/ultralytics/ultralytics (accessed on 2 August 2024).
- Ge, Z.; Liu, S.; Wang, F.; Li, Z.; Sun, J. Yolox: Exceeding yolo series in 2021. arXiv 2021, arXiv:2107.08430. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; pp. 21–37. [Google Scholar]
- Liu, X.; Zhang, Y.; Zhang, S.y.; Wang, Y.; Liang, Z.y.; Ye, X.z. Detection of engineering vehicles in high-resolution monitoring images. Front. Inf. Technol. Electron. Eng. 2015, 16, 346–357. [Google Scholar] [CrossRef]
- Choudhury, S.; Chattopadhyay, S.P.; Hazra, T.K. Vehicle detection and counting using haar feature-based classifier. In Proceedings of the 2017 8th Annual Industrial Automation and Electromechanical Engineering Conference, Bangkok, Thailand, 16–18 August 2017; pp. 106–109. [Google Scholar]
- Harjoko, A.; Candradewi, I.; Bakhtiar, A.A. Intelligent traffic monitoring systems: Vehicles detection, tracking, and counting using Haar cascade classifier and optical flow. In Proceedings of the International Conference on Video and Image Processing, Singapore, 27–29 December 2017; pp. 49–55. [Google Scholar]
- Suhao, L.; Jinzhao, L.; Guoquan, L.; Tong, B.; Huiqian, W.; Yu, P. Vehicle type detection based on deep learning in traffic scene. Procedia Comput. Sci. 2018, 131, 564–572. [Google Scholar] [CrossRef]
- Sang, J.; Wu, Z.; Guo, P.; Hu, H.; Xiang, H.; Zhang, Q.; Cai, B. An improved YOLOv2 for vehicle detection. Sensors 2018, 18, 4272. [Google Scholar] [CrossRef] [PubMed]
- Guo, Y.; Xu, Y.; Li, S. Dense construction vehicle detection based on orientation-aware feature fusion convolutional neural network. Autom. Constr. 2020, 112, 103124. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, Z.; Wu, J.; Tian, Y.; Tang, H.; Guo, X. Real-time vehicle detection based on improved yolo v5. Sustainability 2022, 14, 12274. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention is all you need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017; pp. 5998–6008. [Google Scholar]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A Large-Scale Hierarchical Image Database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Liu, S.; Qi, L.; Qin, H.; Shi, J.; Jia, J. Path aggregation network for instance segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 8759–8768. [Google Scholar]
- Wang, W.; Xie, E.; Song, X.; Zang, Y.; Wang, W.; Lu, T.; Yu, G.; Shen, C. Efficient and accurate arbitrary-shaped text detection with pixel aggregation network. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 8440–8449. [Google Scholar]
- Wang, C.Y.; Liao, H.Y.M.; Wu, Y.H.; Chen, P.Y.; Hsieh, J.W.; Yeh, I.H. CSPNet: A new backbone that can enhance learning capability of CNN. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 390–391. [Google Scholar]
- Ding, X.; Zhang, X.; Ma, N.; Han, J.; Ding, G.; Sun, J. Repvgg: Making vgg-style convnets great again. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 19–25 June 2021; pp. 13733–13742. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized intersection over union: A metric and a loss for bounding box regression. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 16–20 June 2019; pp. 658–666. [Google Scholar]
- Contributors, M. MMYOLO: OpenMMLab YOLO Series Toolbox and Benchmark. 2022. Available online: https://github.com/open-mmlab/mmyolo (accessed on 2 August 2024).
- Chen, K.; Wang, J.; Pang, J.; Cao, Y.; Xiong, Y.; Li, X.; Sun, S.; Feng, W.; Liu, Z.; Xu, J.; et al. MMDetection: Open MMLab Detection Toolbox and Benchmark. arXiv 2019, arXiv:1906.07155. [Google Scholar]
- Wang, W.; Xie, E.; Li, X.; Fan, D.P.; Song, K.; Liang, D.; Lu, T.; Luo, P.; Shao, L. Pyramid vision transformer: A versatile backbone for dense prediction without convolutions. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 568–578. [Google Scholar]
- Wang, W.; Xie, E.; Li, X.; Fan, D.P.; Song, K.; Liang, D.; Lu, T.; Luo, P.; Shao, L. Pvtv2: Improved baselines with pyramid vision transformer. Comput. Vis. Media 2022, 8, 415–424. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hardware or Software | Detailed Specifications |
|---|---|
| CPU | Intel(R) Xeon(R) Platinum 8336C CPU @ 2.30 GHz |
| GPU | NVIDIA GeForce RTX 4090 24 GB × 4 |
| Operating System | Ubuntu 20.04.6 LTS |
| Miniconda | 23.5.2 |
| Python | 3.8.18 |
| PyTorch | 1.11.0 |
| CUDA | 11.3 |
| Model | (%) | (%) | (%) |
|---|---|---|---|
| YOLOv5-L [18] | 76.5 | 91.5 | 83.0 |
| YOLOv6-L [5] | 82.8 | 93.4 | 86.2 |
| YOLOv7-L [19] | 70.0 | 89.0 | 77.7 |
| YOLOv8-L [20] | 85.0 | 94.0 | 88.2 |
| YOLOx-L [21] | 71.8 | 91.5 | 80.8 |
| Faster R-CNN R50 [14] | 70.3 | 90.1 | 79.4 |
| Faster R-CNN R101 [14] | 68.8 | 89.9 | 78.3 |
| Casade R-CNN R50 [15] | 70.5 | 90.4 | 79.4 |
| Casade R-CNN R101 [15] | 70.4 | 89.2 | 79.4 |
| YOLOv6-L Swin-B (Ours) | 88.5 | 95.9 | 91.7 |
| Model | IoU Based on Prediction Results | IoU Based on Ground Truth | ||||||
|---|---|---|---|---|---|---|---|---|
| Number | Mean | Standard Deviation | p -Value | Number | Mean | Standard Deviation | p -Value | |
| YOLOv5-L [18] | 679 | 0.88 | 0.19 | 0.102 | 822 | 0.74 | 0.36 | 0.000 |
| YOLOv6-L [5] | 793 | 0.87 | 0.24 | 0.005 | 822 | 0.84 | 0.28 | 0.005 |
| YOLOv7-L [19] | 665 | 0.85 | 0.22 | 0.000 | 822 | 0.70 | 0.37 | 0.000 |
| YOLOv8-L [20] | 764 | 0.89 | 0.22 | 0.222 | 822 | 0.83 | 0.30 | 0.002 |
| YOLOx-L [21] | 775 | 0.82 | 0.24 | 0.000 | 822 | 0.78 | 0.29 | 0.000 |
| Faster R-CNN R50 [14] | 868 | 0.78 | 0.27 | 0.000 | 822 | 0.80 | 0.25 | 0.000 |
| Faster R-CNN R101 [14] | 879 | 0.77 | 0.28 | 0.000 | 822 | 0.79 | 0.27 | 0.000 |
| Casade R-CNN R50 [15] | 792 | 0.81 | 0.24 | 0.000 | 822 | 0.79 | 0.27 | 0.000 |
| Casade R-CNN R101 [15] | 788 | 0.82 | 0.24 | 0.000 | 822 | 0.78 | 0.28 | 0.000 |
| YOLOv6-L Swin-B (Ours) | 795 | 0.90 | 0.22 | 0.500 | 822 | 0.87 | 0.25 | 0.500 |
| Model | (%) | (%) | (%) |
|---|---|---|---|
| YOLOv6-L EfficientRep [5] | 82.8 | 93.4 | 86.2 |
| YOLOv6-L PVT-L [40] | 76.1 | 89.2 | 81.4 |
| YOLOv6-L PVTv2-B5 [41] | 87.8 | 95.9 | 91.3 |
| YOLOv6-L Swin-B (Ours) | 88.5 | 95.9 | 91.7 |
| Model | (%) | (%) | (%) |
|---|---|---|---|
| Scratch | 0.747 | 0.838 | 0.792 |
| Supervised | 0.826 | 0.891 | 0.856 |
| SimMIM | 0.885 | 0.959 | 0.917 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ling, H.; Zhao, T.; Zhang, Y.; Lei, M. Engineering Vehicle Detection Based on Improved YOLOv6. Appl. Sci. 2024, 14, 8054. https://doi.org/10.3390/app14178054
Ling H, Zhao T, Zhang Y, Lei M. Engineering Vehicle Detection Based on Improved YOLOv6. Applied Sciences. 2024; 14(17):8054. https://doi.org/10.3390/app14178054
Chicago/Turabian StyleLing, Huixuan, Tianju Zhao, Yangqianhui Zhang, and Meng Lei. 2024. "Engineering Vehicle Detection Based on Improved YOLOv6" Applied Sciences 14, no. 17: 8054. https://doi.org/10.3390/app14178054