
Analysis of Mechanical Properties of Steep Surrounding Rock and Failure Process with Countermeasures for Tunnel Bottom Structures

Abstract
:1. Introduction
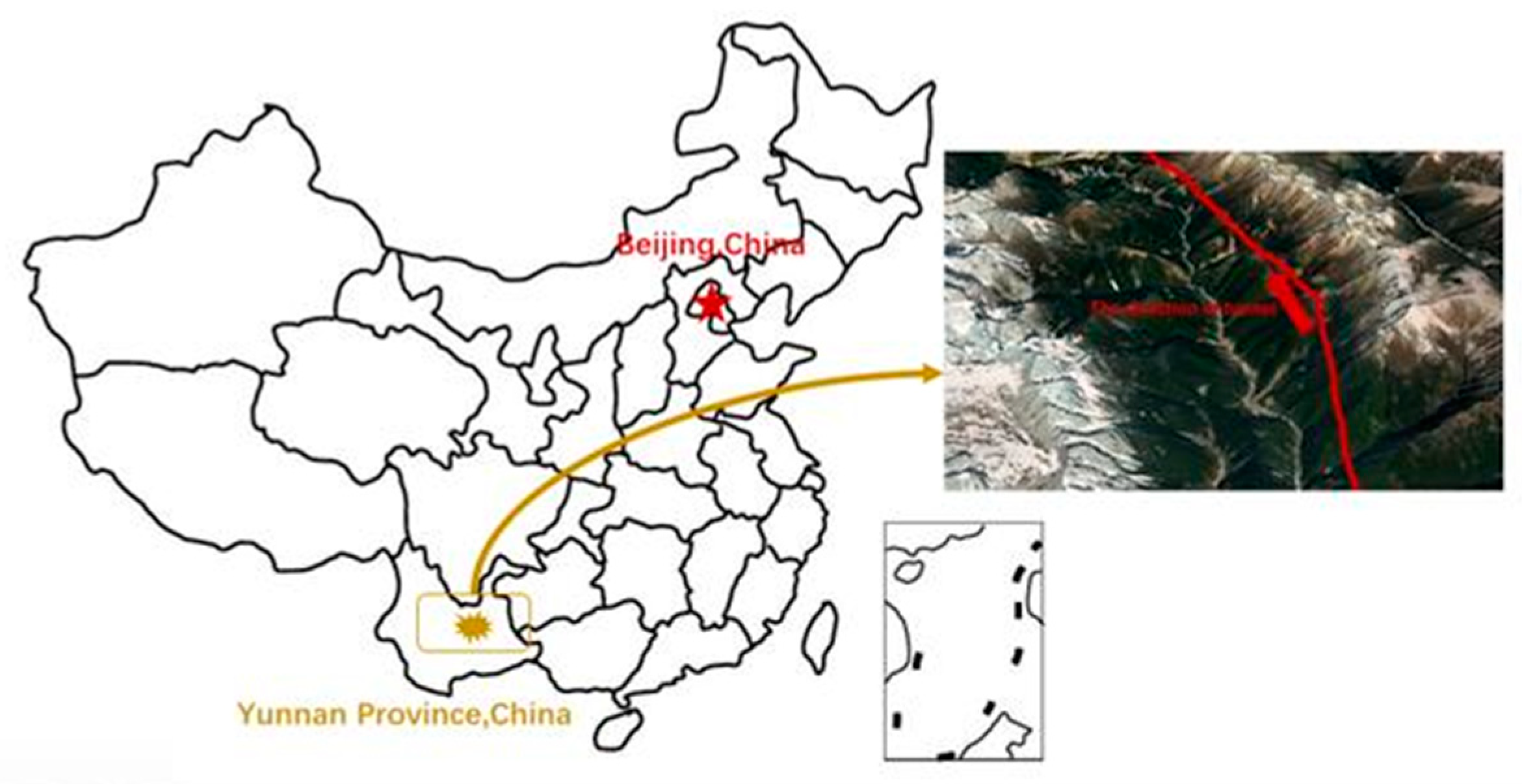
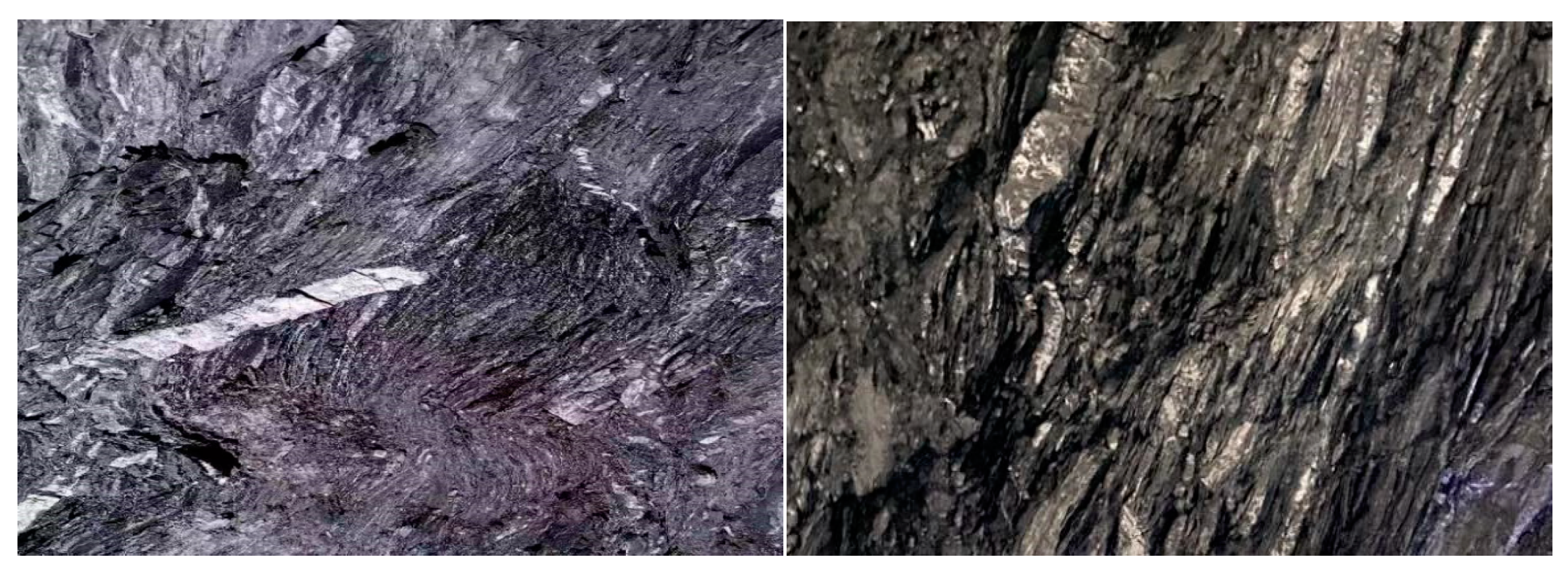
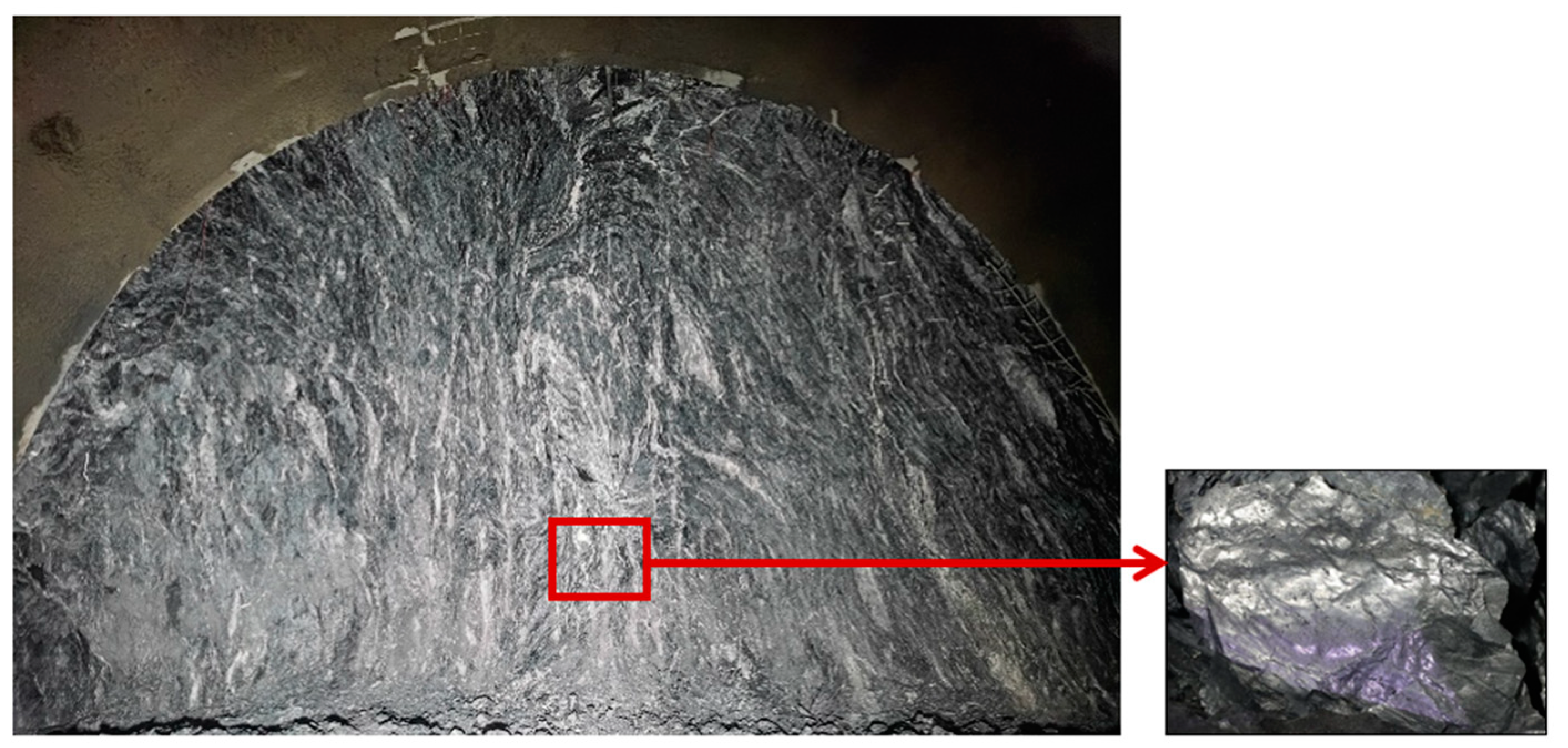
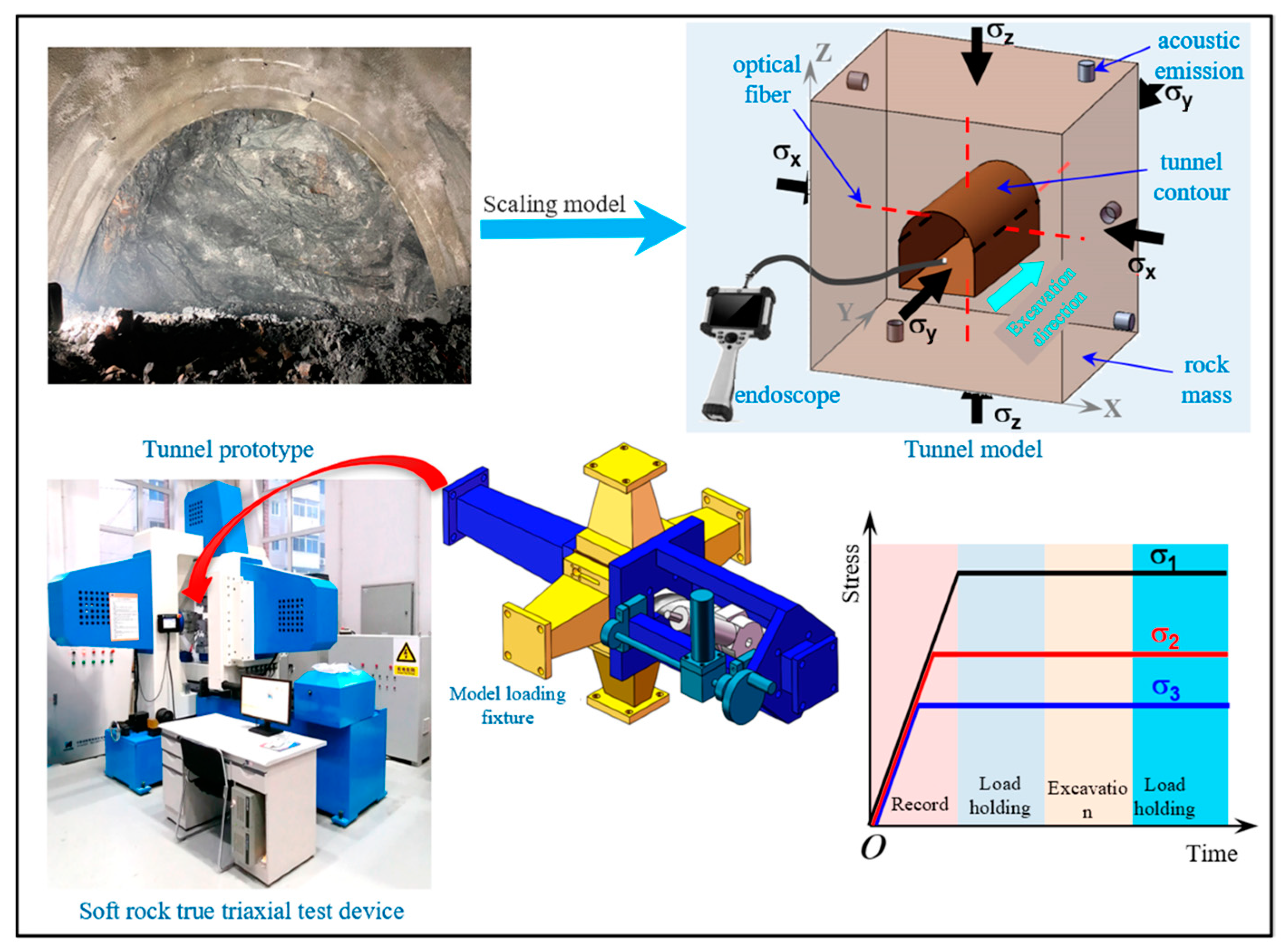
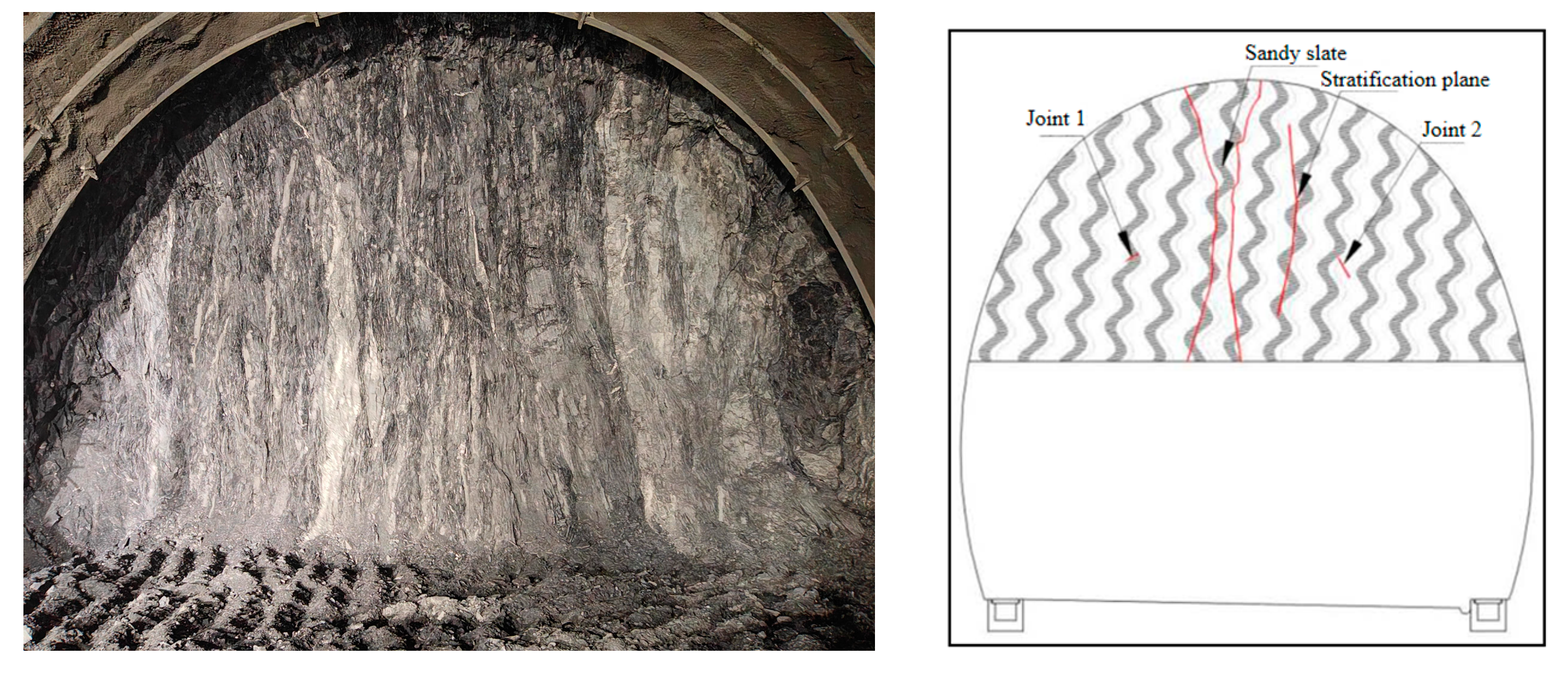
2. Engineering Background
3. Analysis of Mechanical Properties of Steep Surrounding Rock
3.1. Point Load Test
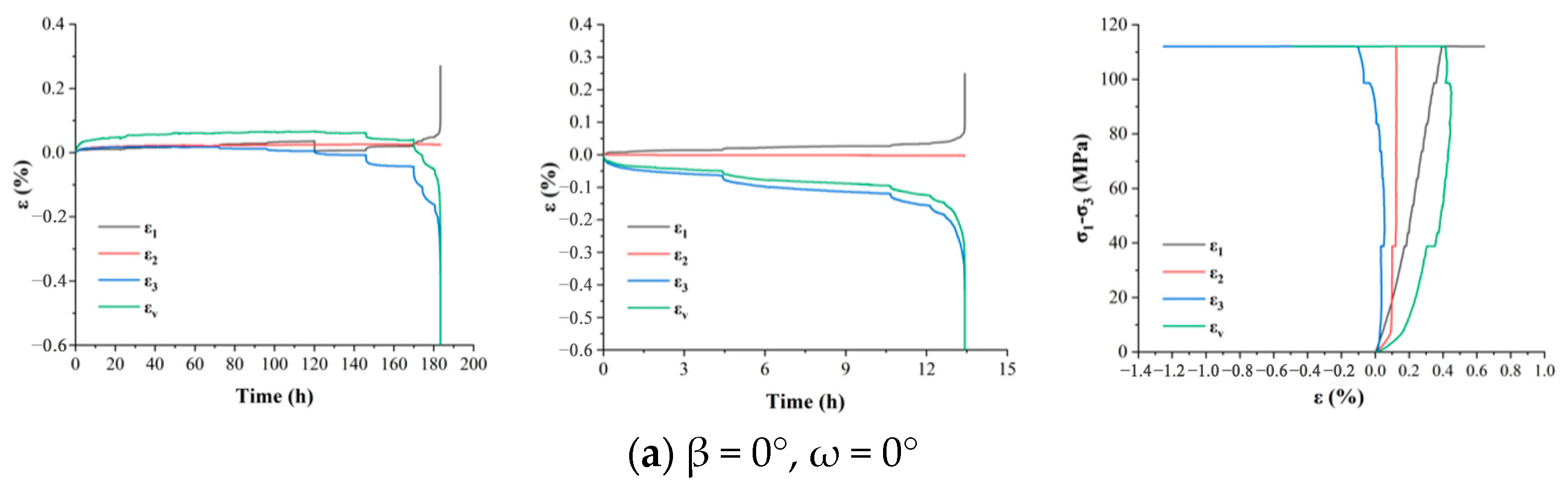
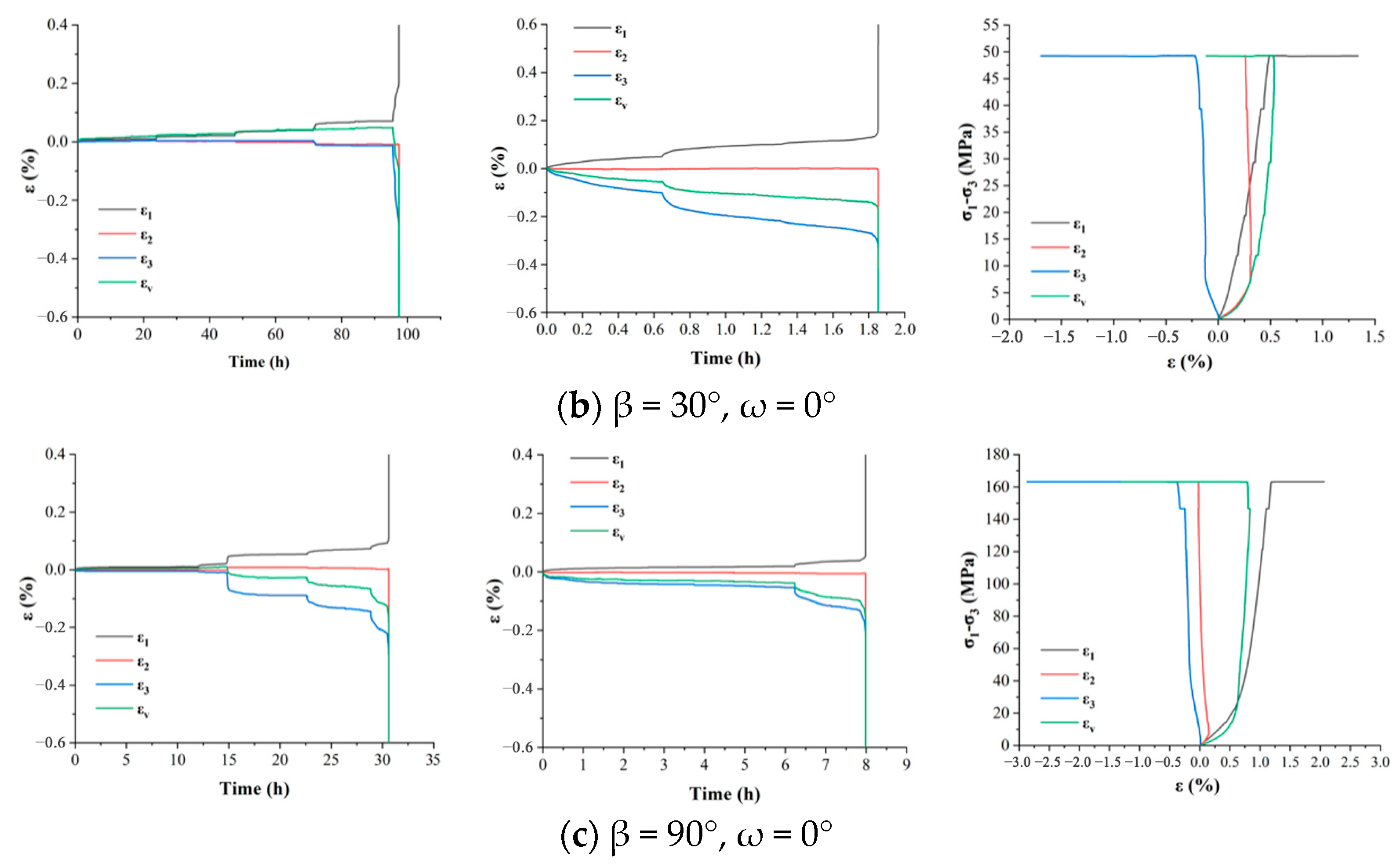
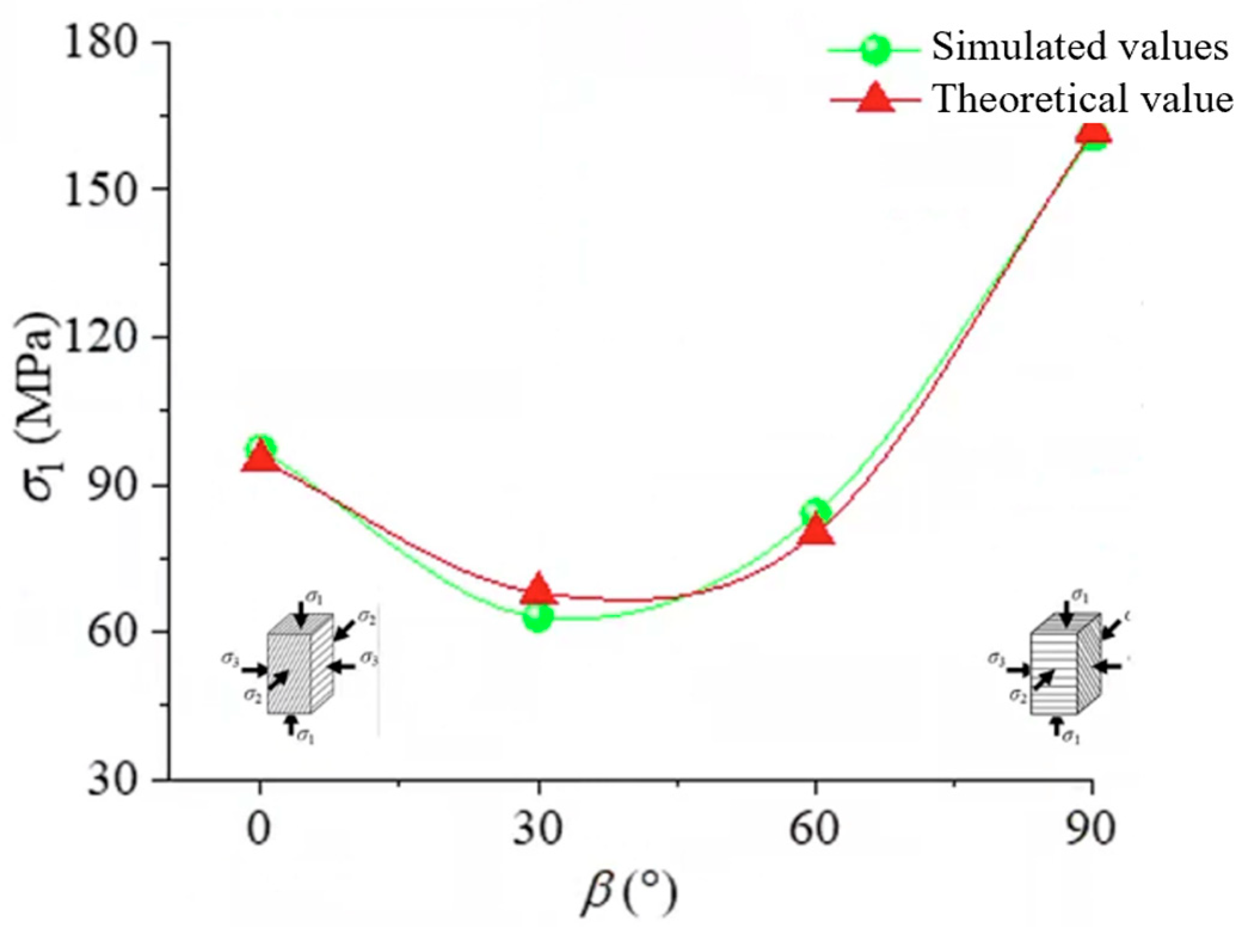
3.2. Triaxial Rock Creep Test
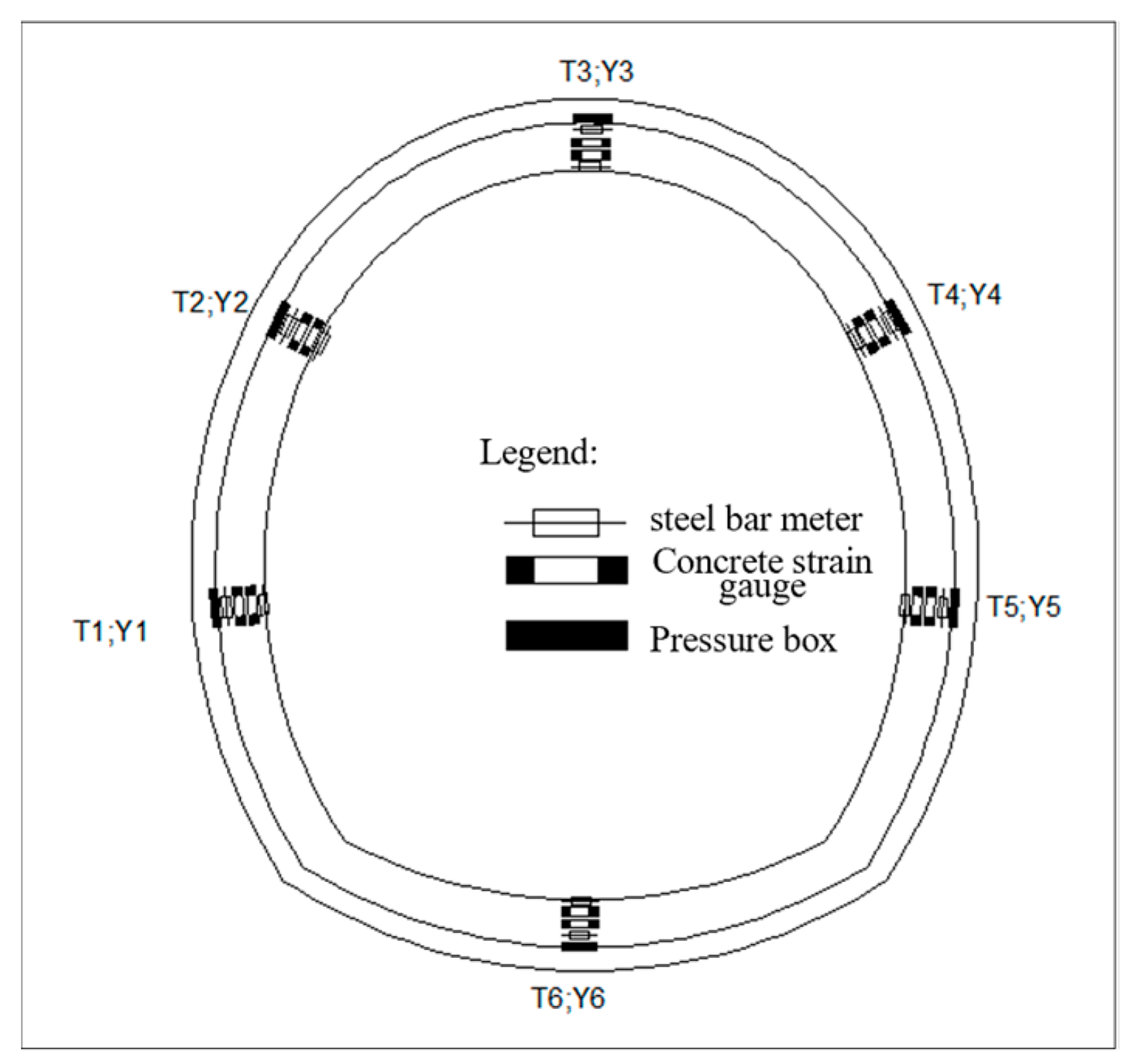
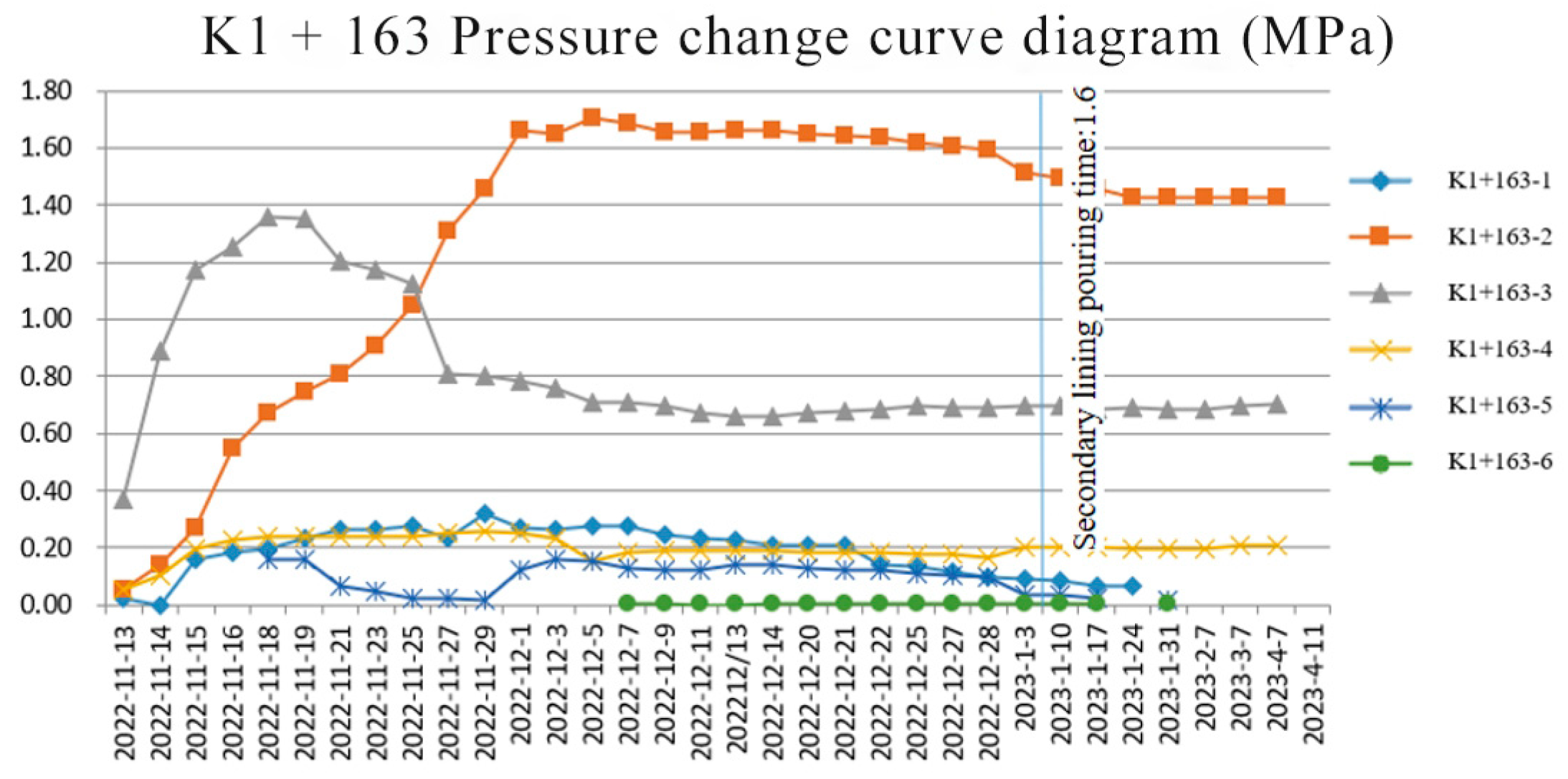
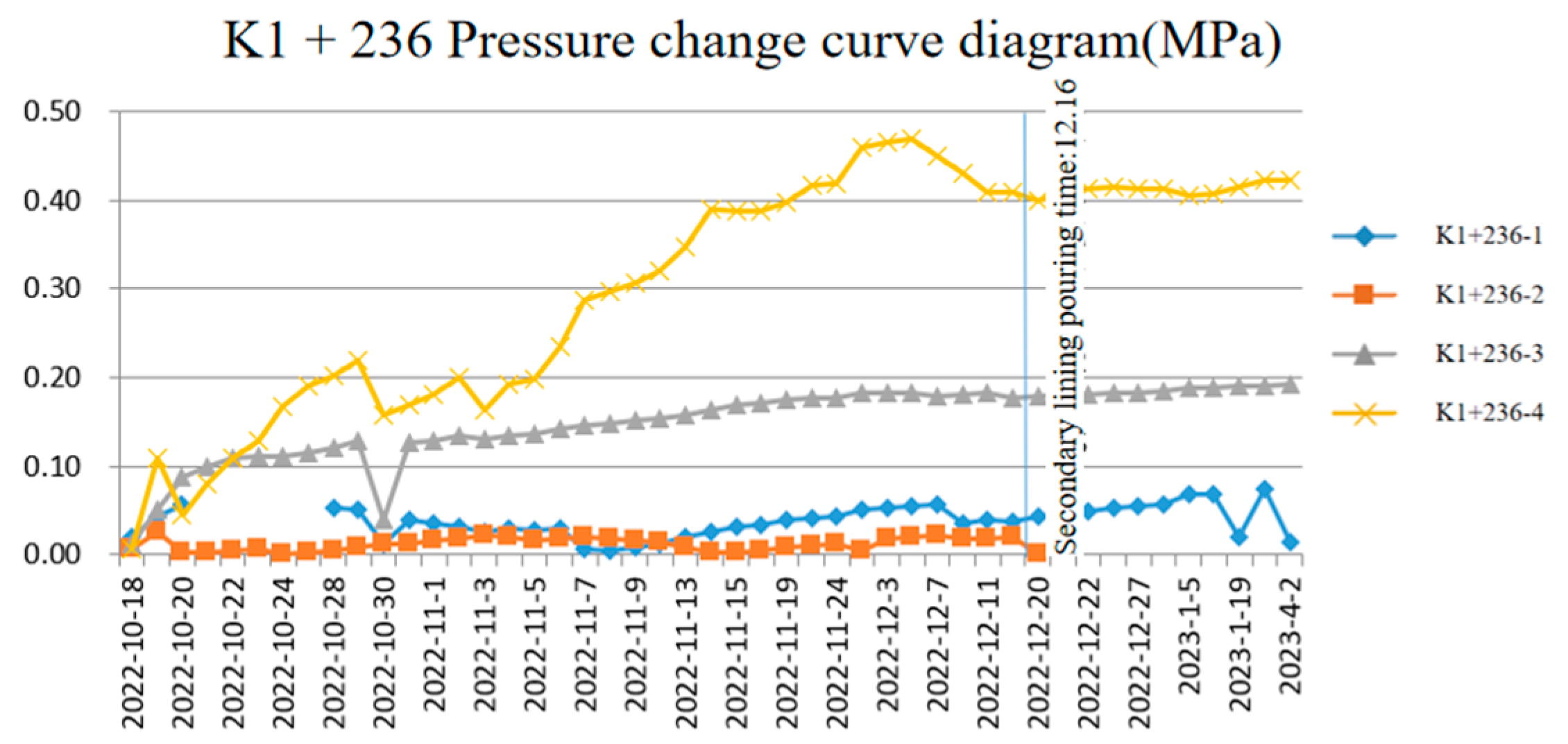
3.3. Field Test Analysis of Surrounding Rock Contact Pressure
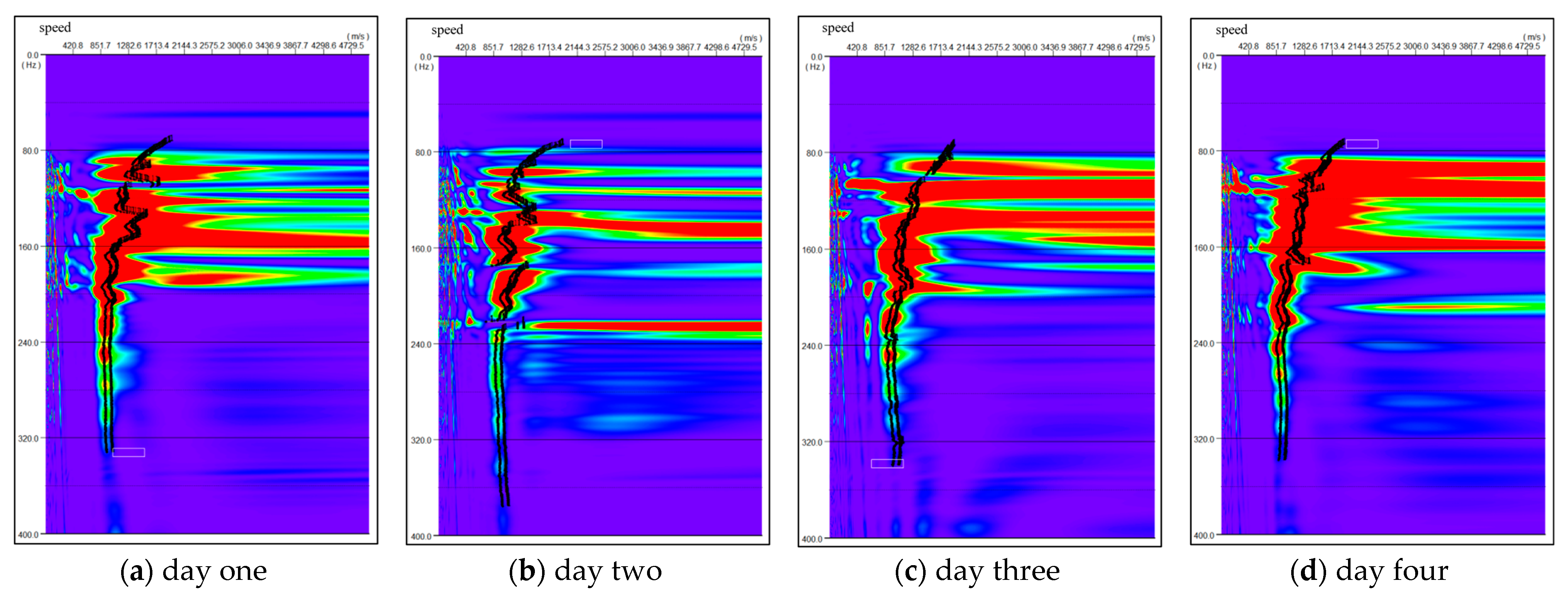
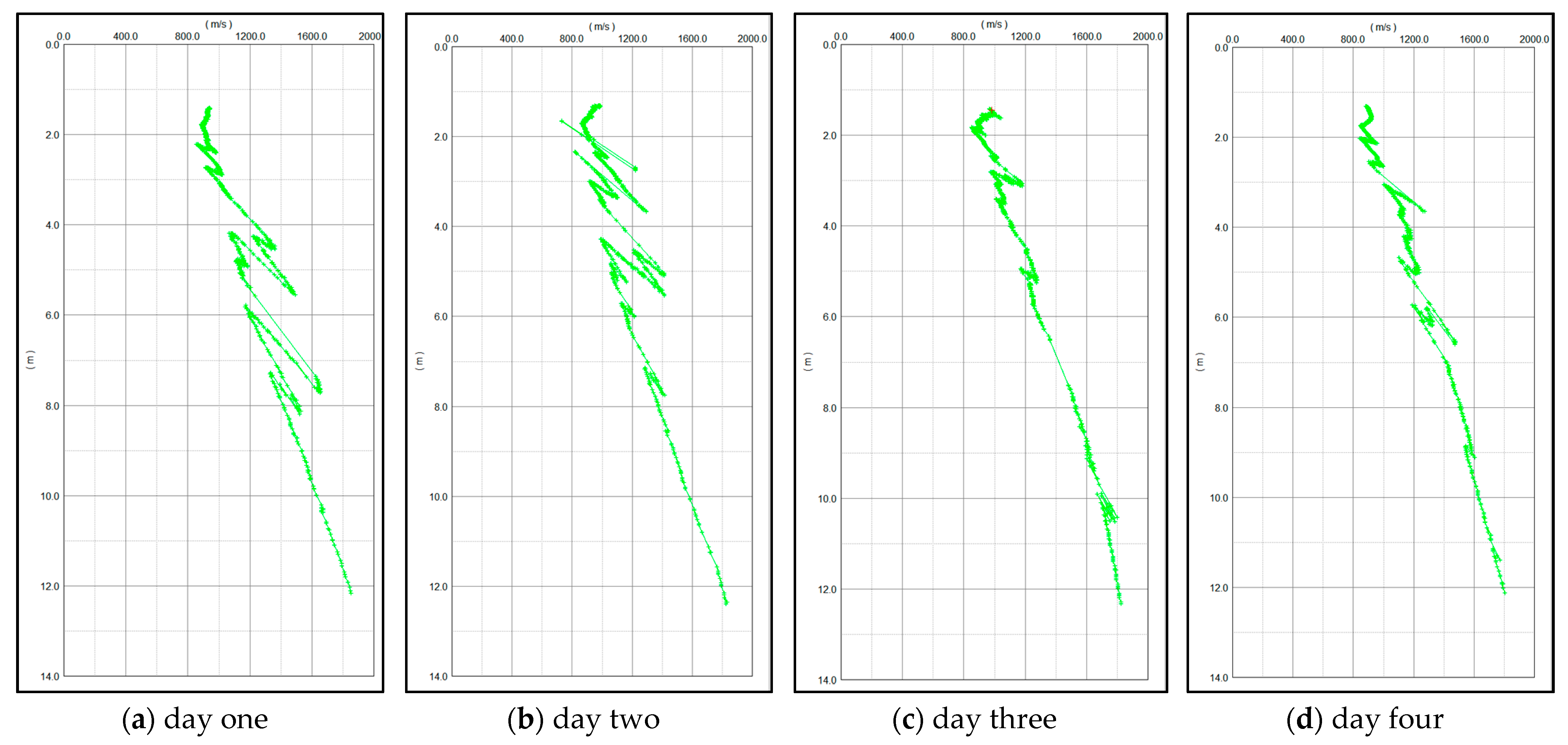
3.4. Loose Ring Test
4. Analysis of Progressive Failure Process of Surrounding Rock and Tunnel Structure
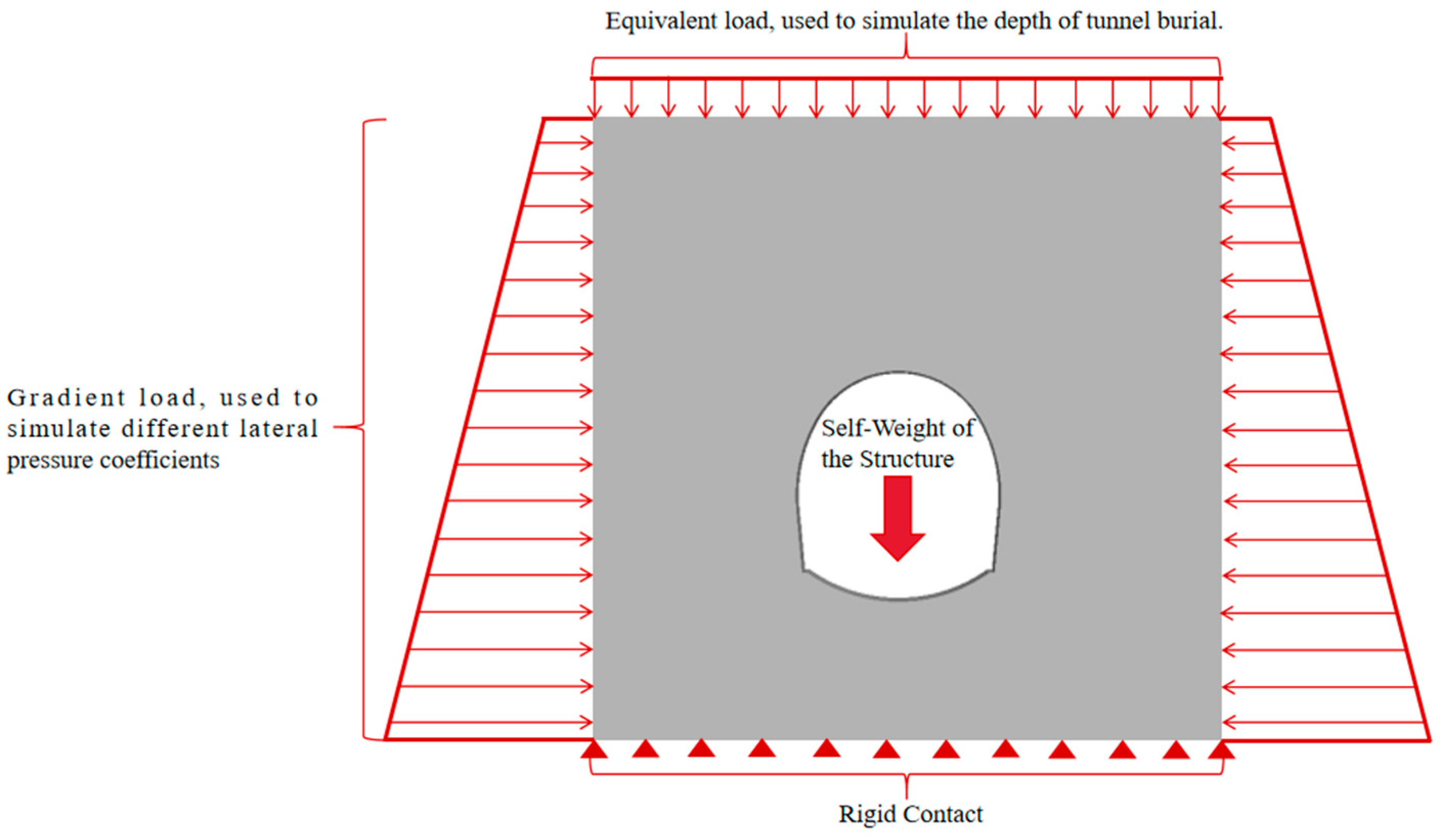
4.1. Establishment of Numerical Simulation Model
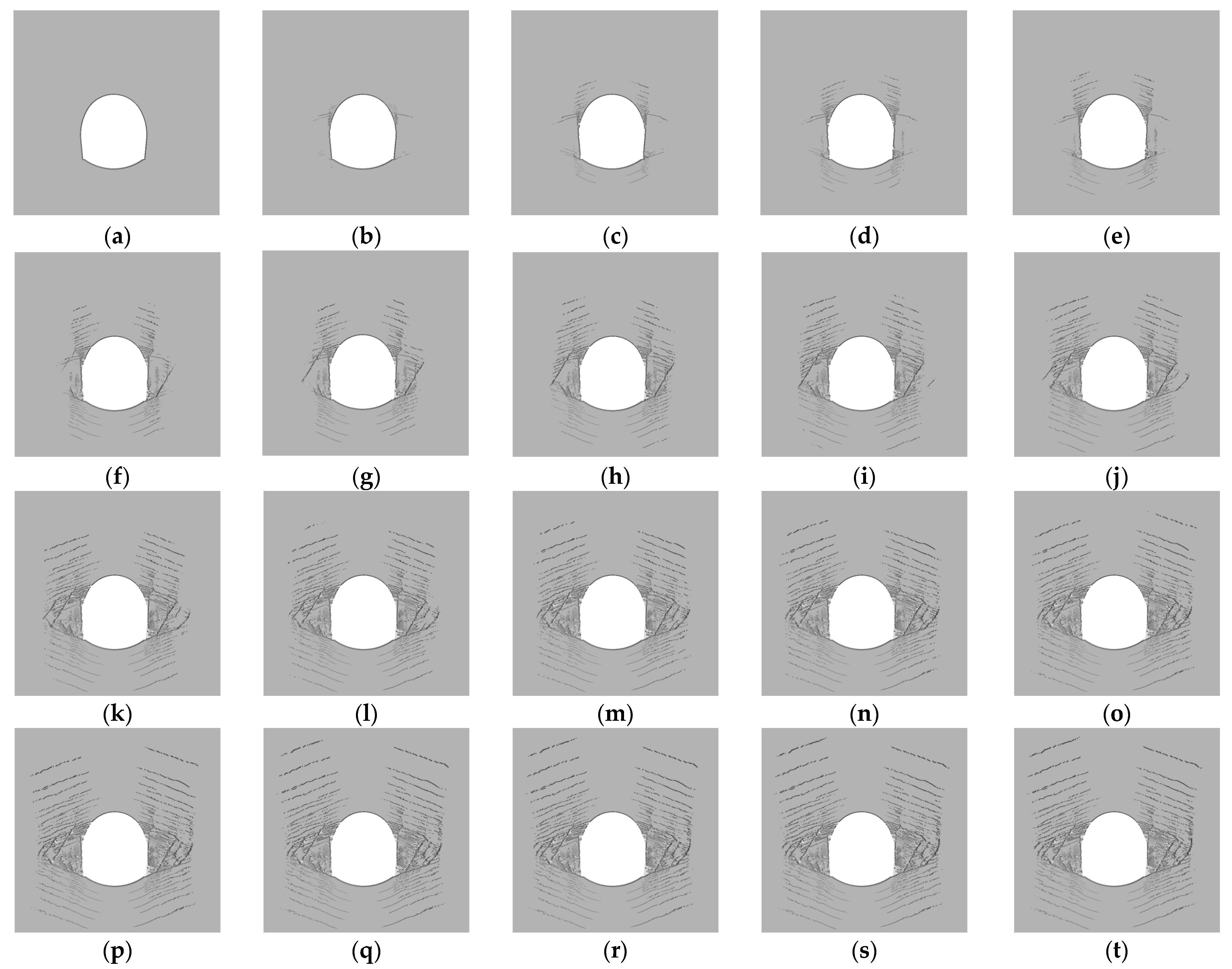
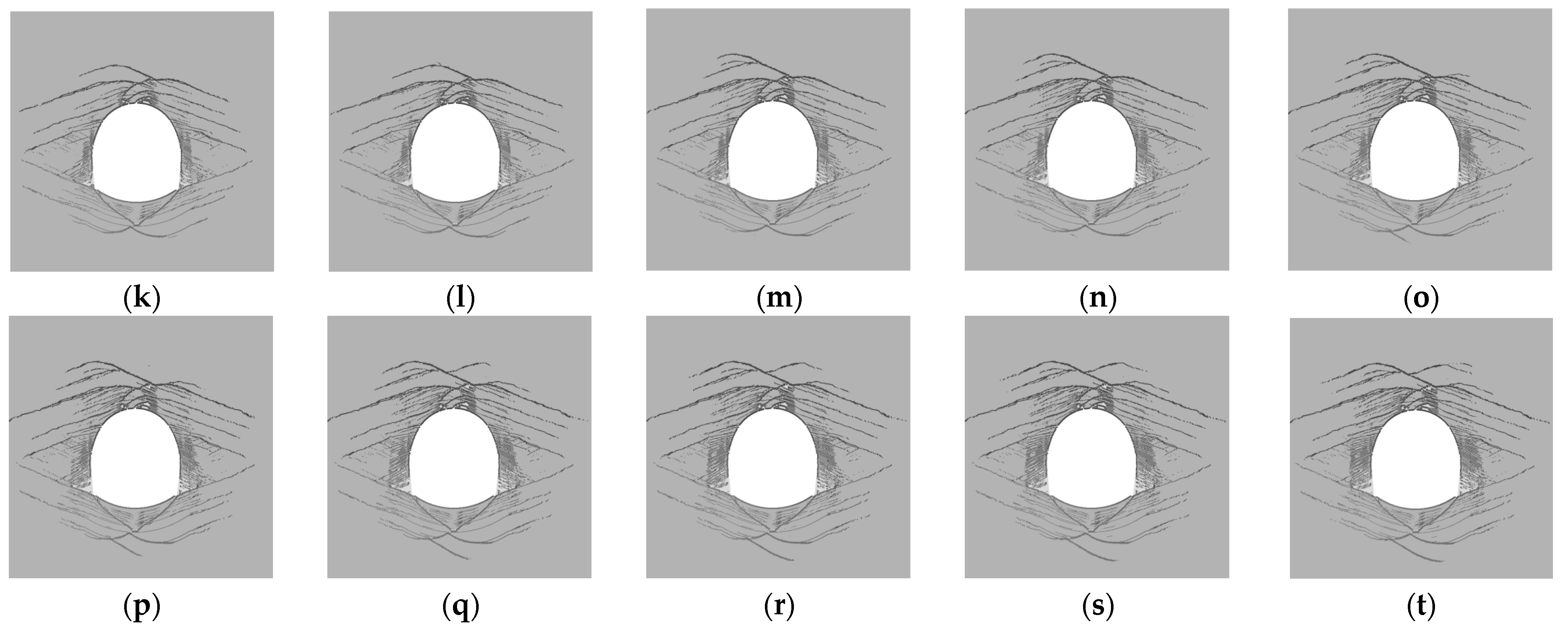
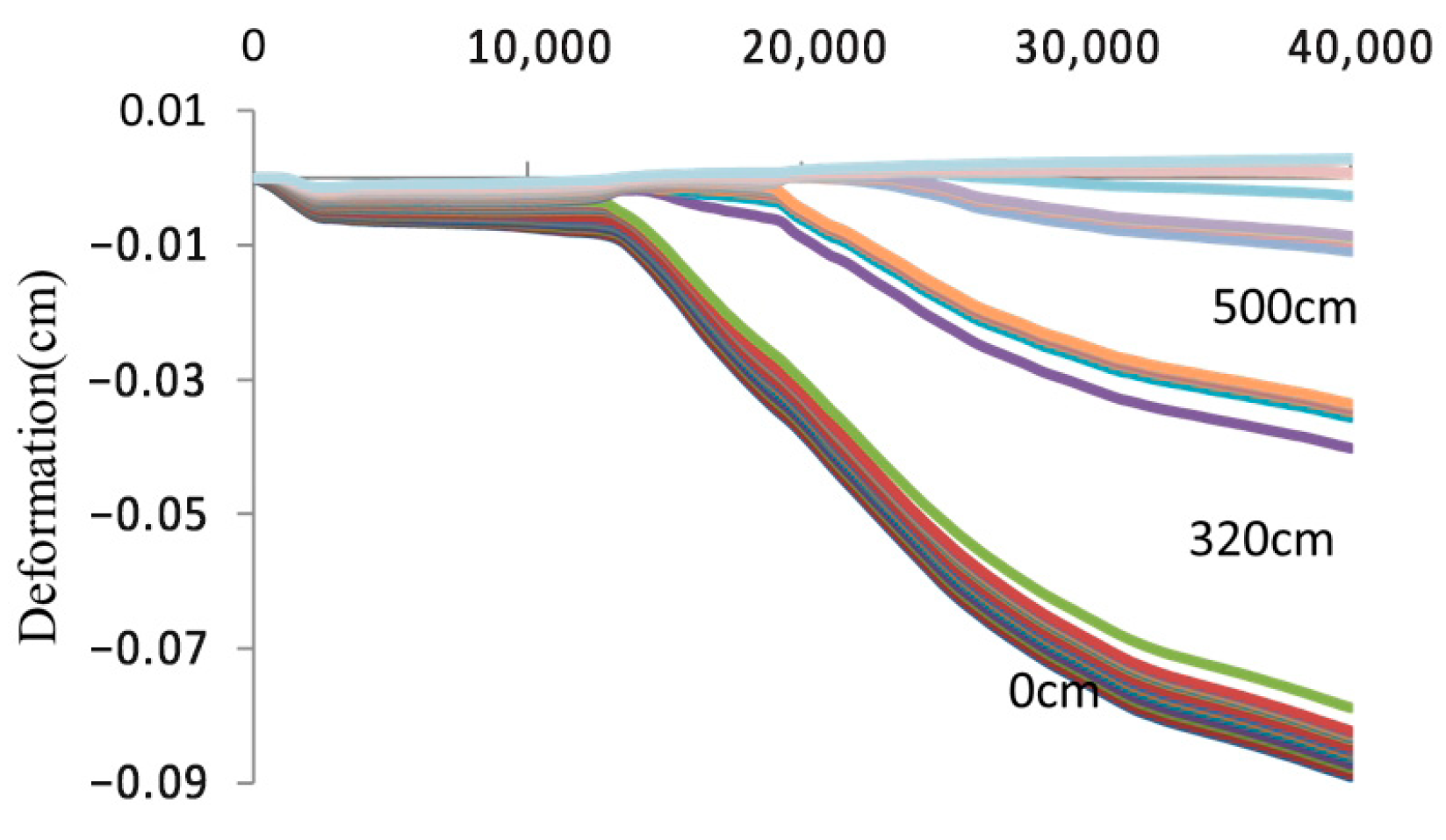
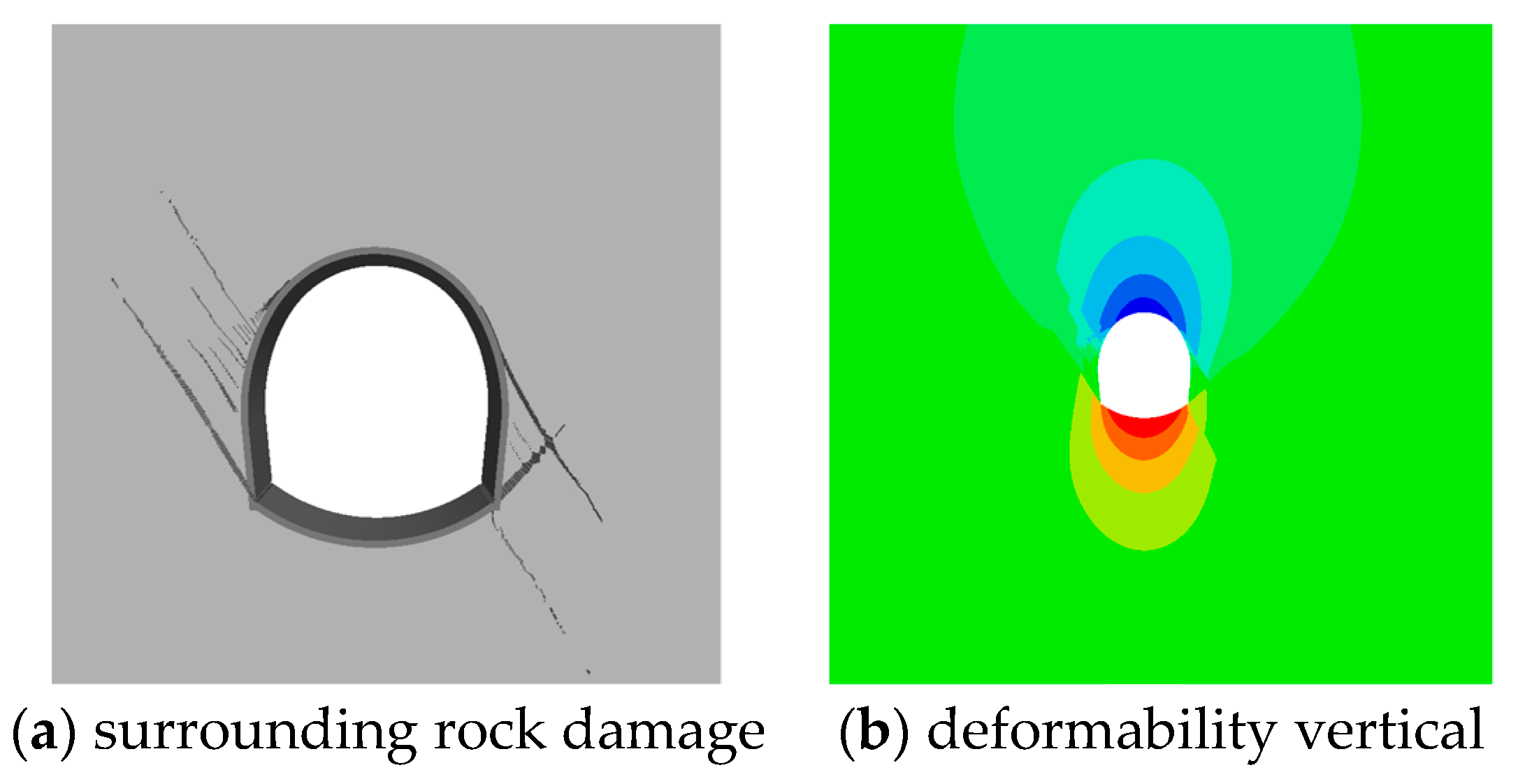
4.2. Numerical Simulation Results
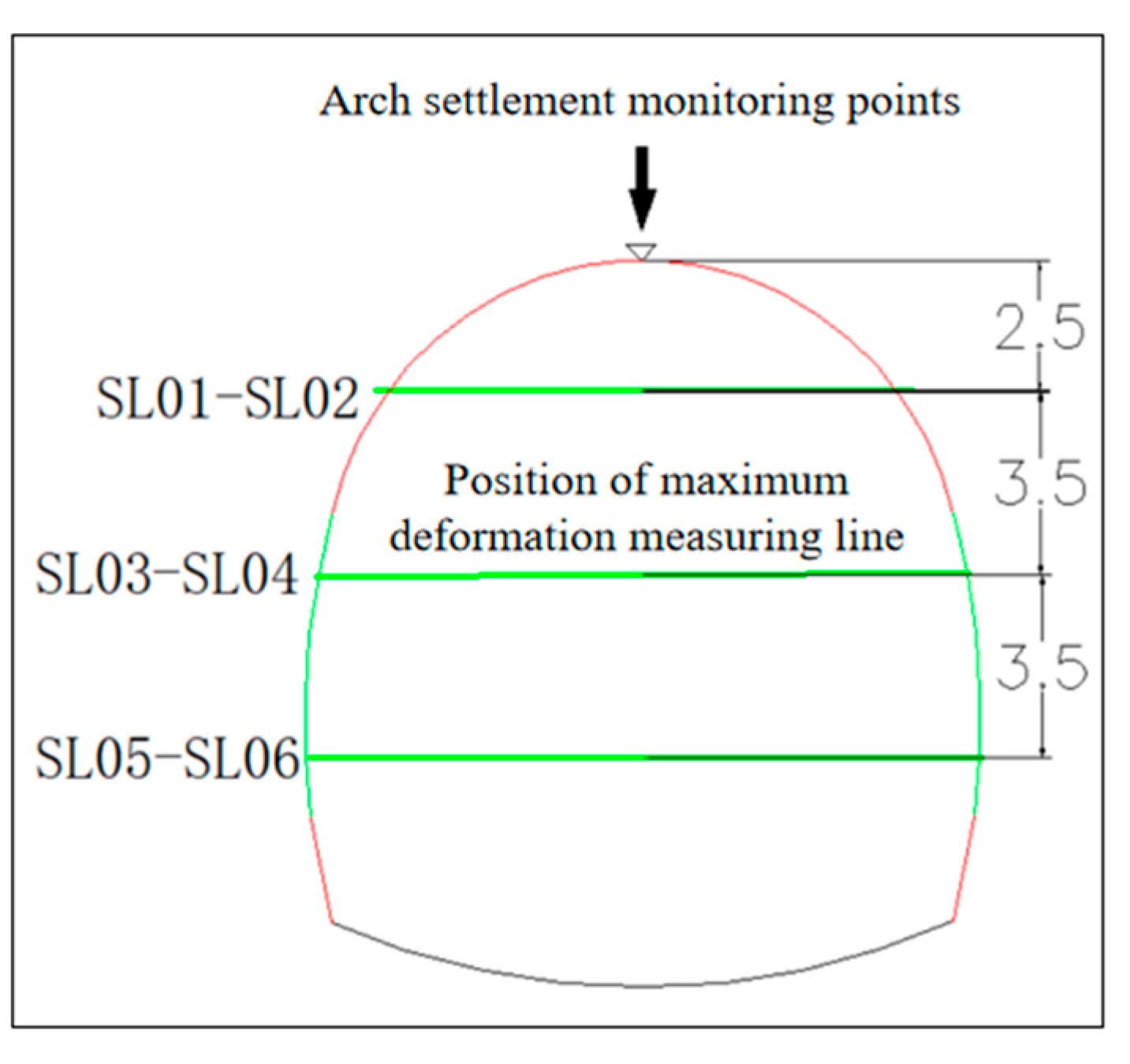
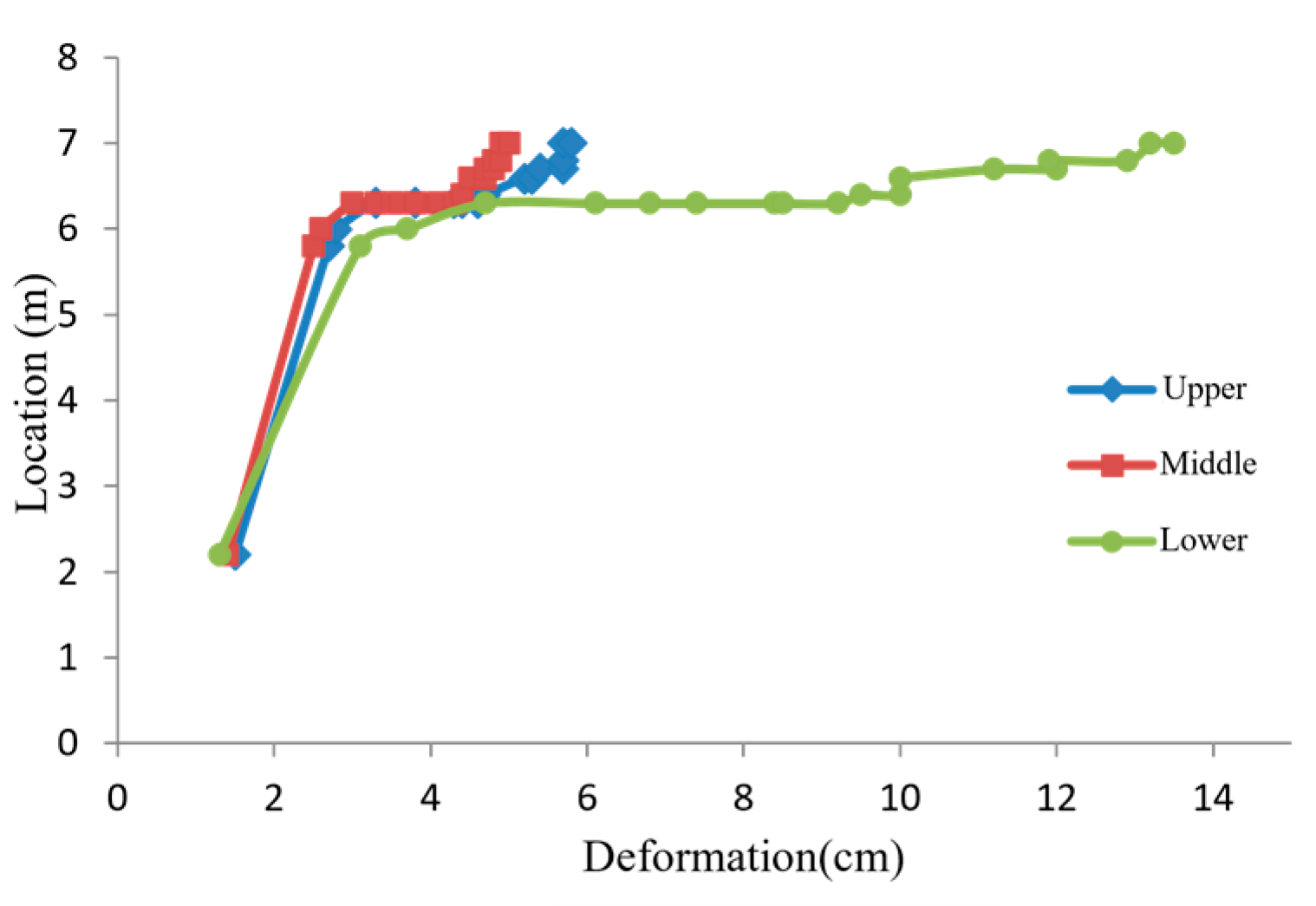
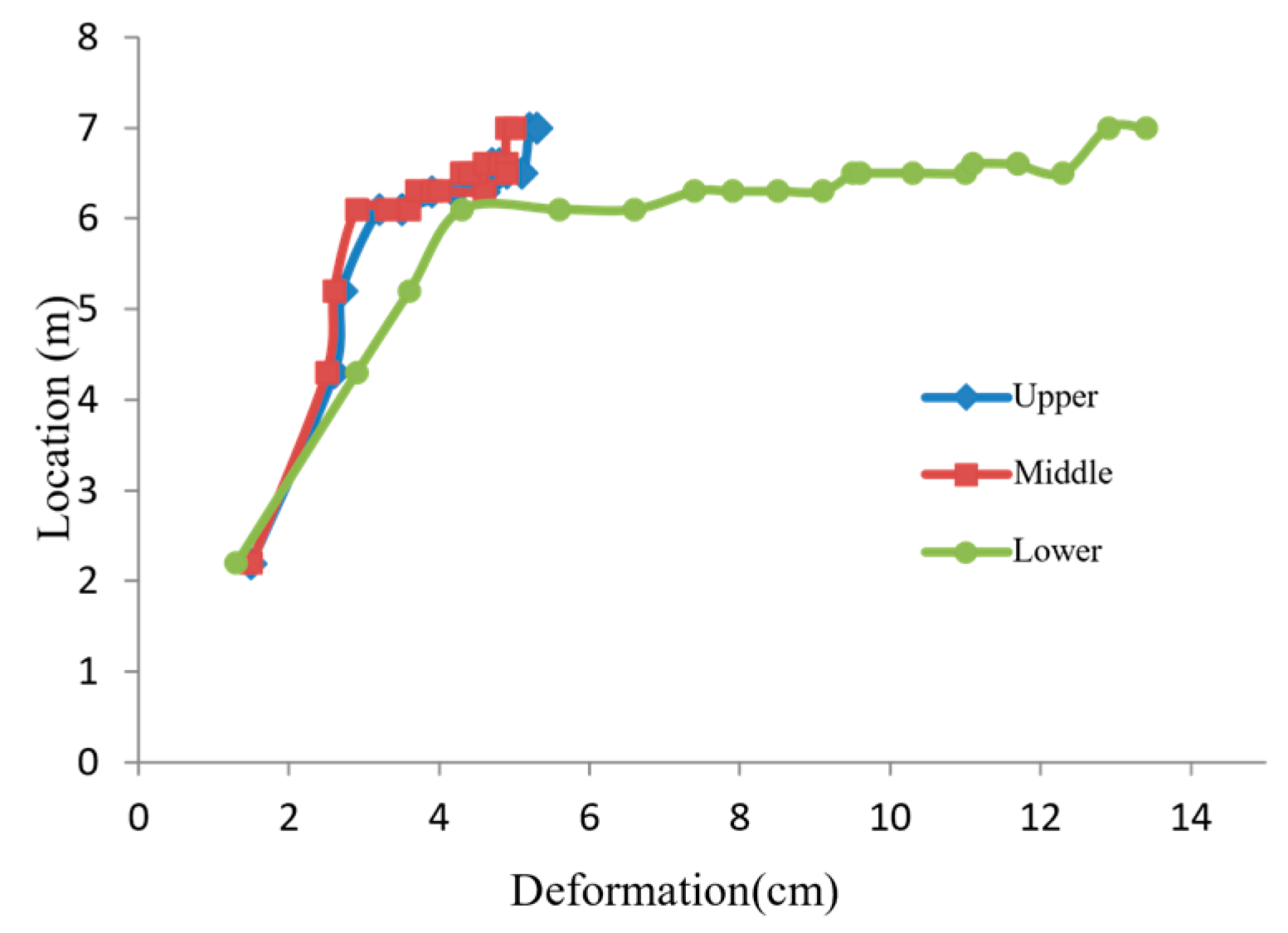
4.3. Site Monitoring Results
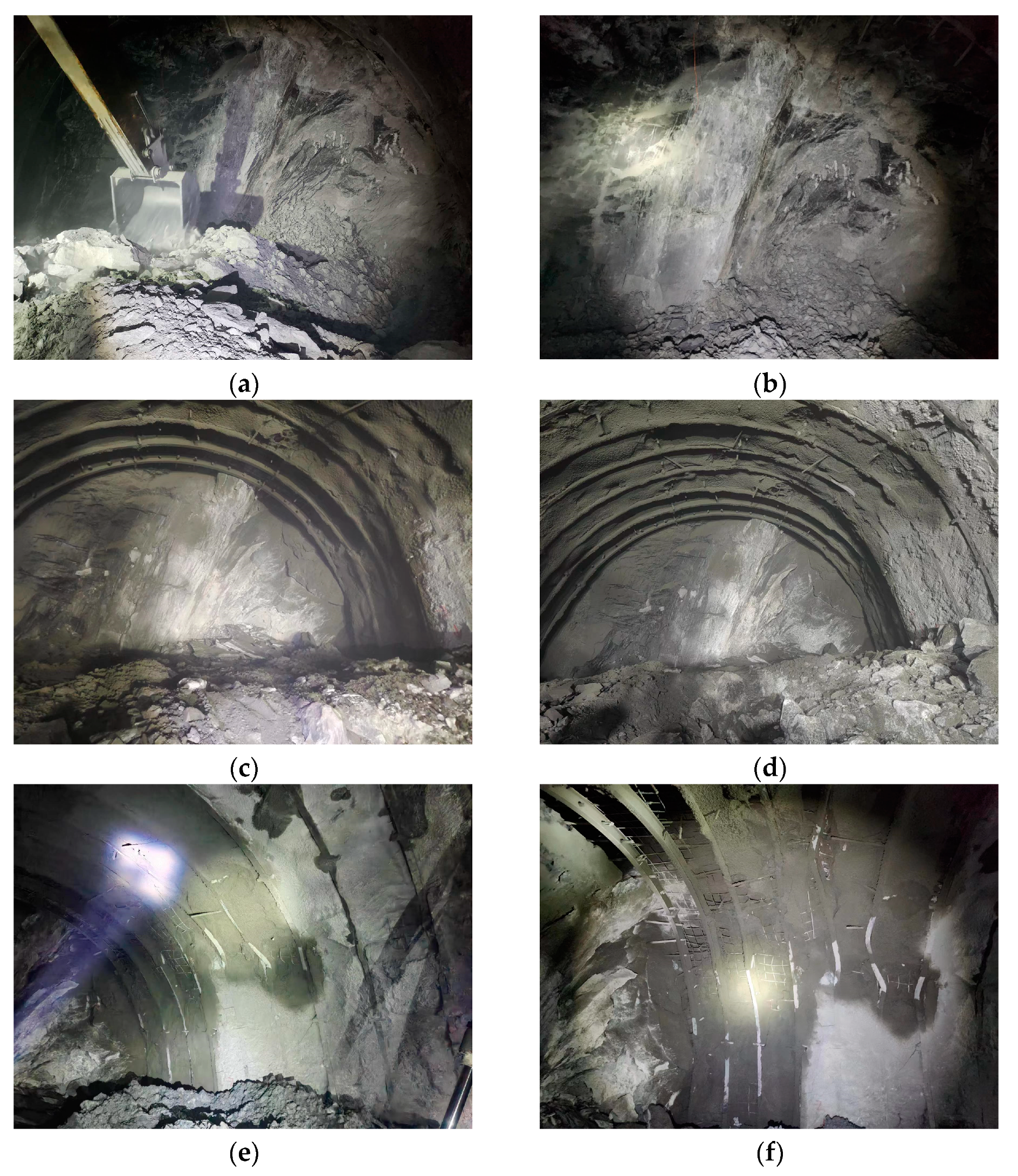
4.4. Analysis of Progressive Failure Process
5. Analysis of Tunnel Bottom Structure Damage and Countermeasures
5.1. Types and Mechanism of Tunnel Bottom Drum
5.2. Analysis of Tunnel Bottom Structure Damage
5.3. Analysis of Tunnel Bottom Structure Countermeasures
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Meng, L.; Li, T.; Jiang, Y.; Wang, R.; Li, Y. Characteristics and mechanisms of large deformation in the Zhegu mountain tunnel on the Sichuan–Tibet highway. Tunn. Undergr. Space Technol. 2013, 37, 157–164. [Google Scholar] [CrossRef]
- Chen, J.; Tian, C.; Luo, Y.; Li, Y.; Liu, W.; Chen, H.; Zhu, H. Deformation behavior and damage characteristics of surface buildings induced by undercrossing of shallow large-section loess tunnels. Eng. Fail. Anal. 2024, 162, 108422. [Google Scholar] [CrossRef]
- Bao, H.; Liu, C.; Liang, N.; Lan, H.; Yan, C.; Xu, X. Analysis of large deformation of deep-buried brittle rock tunnel in strong tectonic active area based on macro and microcrack evolution. Eng. Fail. Anal. 2022, 138, 106351. [Google Scholar] [CrossRef]
- Xu, C.; Xia, C. A new large strain approach for predicting tunnel deformation in strain-softening rock mass based on the generalized Zhang-Zhu strength criterion. Int. J. Rock. Mech. Min. Sci. 2021, 143, 104786. [Google Scholar] [CrossRef]
- Wu, K.; Zheng, X.; Zhao, N.; Shao, Z. Effect of compressible layer on time-dependent behavior of soft-rock large deformation tunnels revealed by mathematical analytical method. Appl. Math. Model. 2024, 126, 457–481. [Google Scholar] [CrossRef]
- Jia, R.; Zheng, G.; Jiang, Y. The effect of clay structure formed during deposition on the ground deformation induced by shield tunneling. Tunn. Undergr. Space Technol. 2024, 147, 105689. [Google Scholar] [CrossRef]
- He, H.; Wang, S.; Shen, W.; Zhang, W. The influence of pipe-jacking tunneling on deformation of existing tunnels in soft soils and the effectiveness of protection measures. Transp. Geotech. 2023, 42, 101061. [Google Scholar] [CrossRef]
- Tian, Y.; Shu, X.; Tian, H.; He, L.; Jin, Y.; Huang, M. Effect of horizontal stress on the mesoscopic deformation and failure mechanism of layered surrounding rock masses in tunnels. Eng. Fail. Anal. 2023, 148, 107226. [Google Scholar] [CrossRef]
- Hong, J.; Huang, X.; Chen, R.; Zhang, Y.; Lu, J.; Zhou, F. Investigating on the longitudinal seismic response and deformation mechanism of a long tunnel under the combined action of the traveling wave effect and mutation of the soil layer. Structures 2024, 63, 106377. [Google Scholar] [CrossRef]
- Wu, F.; Sheng, W.; Zhang, G.; Li, H.; Ren, Y.; Zhang, K.; Wang, C.; Sun, T. Research on the deformation and settlement characteristics of tunnel lining structures under repeated loads. Structures 2024, 63, 106366. [Google Scholar] [CrossRef]
- Zhang, B.; Tao, Z.; Guo, P.; Yang, K.; Yang, Y. Model test on deformation and failure mechanism of tunnel support with layered rock mass under high ground stress. Eng. Fail. Anal. 2023, 150, 107296. [Google Scholar] [CrossRef]
- Yang, S.-Q.; Tao, Y.; Xu, P.; Chen, M. Large-scale model experiment and numerical simulation on convergence deformation of tunnel excavating in composite strata. Tunn. Undergr. Space Technol. 2019, 94, 103133. [Google Scholar] [CrossRef]
- Ma, M.; Yang, X.; Zhou, J.; Li, L.; Tian, J. Model tests and numerical simulations of deformation repair effect for operating shield tunnels under horizontal lateral grouting. Transp. Geotech. 2024, 47, 101277. [Google Scholar] [CrossRef]
- Du, X.; Li, Y.; Dong, X.; Han, K. Large deformation induced soil pressure changes in a loess tunnel. Eng. Fail. Anal. 2024, 163, 108568. [Google Scholar] [CrossRef]
- Tian, H.; Chen, W.; Tan, X.; Shu, X. Failure of rigid support and yielding support solution in large deformation tunnels: A case study. Eng. Fail. Anal. 2022, 140, 106598. [Google Scholar] [CrossRef]
- Yu, W.; Luo, X.; Wang, B.; Liu, J.; Zi, X. Design approaches for active prestressed and prestressed yielding anchorage systems in large deformation traffic tunnels. Tunn. Undergr. Space Technol. 2024, 152, 105942. [Google Scholar] [CrossRef]
- Liu, Y.; Song, H.L.; Sun, X.D.; Xing, H.P.; Feng, C.Y.; Liu, J.F.; Zhao, G.T. Characteristics of rail deformation caused by tunnel floor heave and corresponding running risk of high-speed train. Constr. Build. Mater. 2022, 346, 128385. [Google Scholar] [CrossRef]
- Wang, C.; Zhang, D.; Tan, D.; Ye, J.; Wang, X.; Wang, C.; Li, Q. Study on the evolution of limestone damage and permeability under the tunnel driving stress path. Constr. Build. Mater. 2024, 425, 136050. [Google Scholar] [CrossRef]
- Wu, K.; Shao, Z.; Qin, S. A solution for squeezing deformation control in tunnels using foamed concrete: A review. Constr. Build. Mater. 2020, 257, 119539. [Google Scholar] [CrossRef]
- Zhang, X.; Broere, W. Monitoring seasonal deformation behavior of an immersed tunnel with distributed optical fiber sensors. Measurement 2023, 219, 113268. [Google Scholar] [CrossRef]
- Zhu, A. A novel high-precision photogrammetric technique for monitoring subway tunnel deformation. Structures 2023, 55, 2217–2231. [Google Scholar] [CrossRef]
- Zheng, G.; Zhen, J.; Cheng, X.; Du, Y.; Yu, D.; Song, X. Basal heave stability analysis of excavations considering the soil strength increasing with depth. Comput. Geotech. 2024, 166, 106026. [Google Scholar] [CrossRef]
- Ma, K.; Zhang, J.; Zhang, J.; Dai, Y.; Zhou, P. Floor heave failure mechanism of large-section tunnels in sandstone with shale stratum after construction: A case study. Eng. Fail. Anal. 2022, 140, 106497. [Google Scholar] [CrossRef]
- Ou, X.-F.; Ouyang, L.-X.; Xu, X.-X.; Wang, L. Case study on floor heave failure of highway tunnels in gently inclined coal seam. Eng. Fail. Anal. 2022, 136, 106224. [Google Scholar] [CrossRef]
- Feng, J.; Gong, L.; Wang, L.; Zhou, P.; Zhang, P.; Li, Y.; Liu, Z. Study on failure mechanism and treatment measures of floor heave of high-speed railway tunnel in the interbedded surrounding rock with high geostress. Eng. Fail. Anal. 2023, 150, 107365. [Google Scholar] [CrossRef]
- Li, Z.X.; Fujii, Y.; Alam, A.K.M.B.; Li, Z.H.; Du, F.; Wei, W.J. Implementing a simple 2D constitutive model for rocks into finite element method. Comput. Geotech. 2024, 167, 106095. [Google Scholar] [CrossRef]
- Mo, S.; Sheffield, P.; Corbett, P.; Ramandi, H.L.; Oh, J.; Canbulat, I.; Saydam, S. A numerical investigation into floor buckling mechanisms in underground coal mine roadways. Tunn. Undergr. Space Technol. 2020, 103, 103497. [Google Scholar] [CrossRef]
- Wang, W.; Gao, X.; Ding, Z.; Ma, H.; Ren, J.; Liu, Z. Fracture characteristic and support effect around deep lined tunnels using CGP-FDEM simulation and field investigation analysis. Eng. Anal. Bound. Elem. 2024, 161, 29–47. [Google Scholar] [CrossRef]
- Chen, Z.; Zhuang, D.; Yu, B.; Ning, Z.; Zhan, H.; He, C. Seepage interaction mechanism of crossing tunnels and existing tunnels: Model test and numerical analysis. Transp. Geotech. 2024, 46, 101269. [Google Scholar] [CrossRef]
- Ruiz-Gutiérrez, É.; Hasslberger, J.; Klein, M.; Dalgarno, K.; Chakraborty, N. Physically consistent modelling of surface tension forces in the Volume-of-Fluid method for three or more phases. J. Comput. Phys. 2024, 513, 113149. [Google Scholar] [CrossRef]
- Ni, W.; Zeng, Q.; Ruan, Y.; He, Z. A novel steepness-adjustable harmonic volume-of-fluid method for interface capturing. J. Comput. Phys. 2024, 501, 112765. [Google Scholar] [CrossRef]
- Sabooniha, E.; Nick, H.M. Pore-scale investigation of injectivity impairment caused by oil droplets during produced water reinjection using volume of fluid method. J. Mol. Liq. 2024, 411, 125686. [Google Scholar] [CrossRef]
- Wu, L. Theory of Plates and Shells; Shanghai Jiao Tong University Press: Shanghai, China, 1989. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Serial Number | P Breaking Load (N) | Is(50) Point Load Strength of Standard Specimens (MPa) | Rc Uniaxial Compression Strength of Rock (MPa) |
|---|---|---|---|
| 1 | 272 | 0.10 | 4.0 |
| 2 | 178 | 0.03 | 1.60 |
| 3 | 192 | 0.05 | 2.25 |
| 4 | 130 | 0.05 | 2.49 |
| 5 | 246 | 0.08 | 3.26 |
| 6 | 162 | 0.084 | 3.57 |
| 7 | 0 | 0 | 0 |
| 8 | 972 | 0.27 | 8.58 |
| 9 | 0 | 0 | 0 |
| 10 | 958 | 0.12 | 4.53 |
| 11 | 0 | 0 | 0 |
| 12 | 472 | 0.18 | 6.27 |
| 13 | 702 | 0.21 | 7.09 |
| 14 | 2 | 0.001 | 0.09 |
| 15 | 618 | 0.26 | 7.45 |
| 16 | 236 | 0.72 | 3.17 |
| 17 | 432 | 0.370 | 10.83 |
| 18 | 290 | 0.10 | 3.92 |
| 19 | 226 | 0.19 | 6.46 |
| 20 | 0 | 0 | 0 |
| Surrounding Rock Classification | Volumetric Weight/(kN/m3) | E/(GPa) | Poisson Ratio | Angle of Internal Friction/(°) | Cohesion/(MPa) |
|---|---|---|---|---|---|
| Va | 19 | 1.65 | 0.37 | 24 | 0.16 |
| Density/(kg/m3) | Viscosity/(Pa·s) | Inflow/(m3/s) | Initial Pressure/(kPa) |
|---|---|---|---|
| 1000 | 0.001 | 0.002 | 49.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, R.; Chen, T.; Yin, X.; Wang, G.; Li, M.; Wang, S. Analysis of Mechanical Properties of Steep Surrounding Rock and Failure Process with Countermeasures for Tunnel Bottom Structures. Appl. Sci. 2024, 14, 8341. https://doi.org/10.3390/app14188341
Fan R, Chen T, Yin X, Wang G, Li M, Wang S. Analysis of Mechanical Properties of Steep Surrounding Rock and Failure Process with Countermeasures for Tunnel Bottom Structures. Applied Sciences. 2024; 14(18):8341. https://doi.org/10.3390/app14188341
Chicago/Turabian StyleFan, Rong, Tielin Chen, Xuexuan Yin, Gujian Wang, Man Li, and Shunyu Wang. 2024. "Analysis of Mechanical Properties of Steep Surrounding Rock and Failure Process with Countermeasures for Tunnel Bottom Structures" Applied Sciences 14, no. 18: 8341. https://doi.org/10.3390/app14188341