
Enhancing Marine Topography Mapping: A Geometrically Optimized Algorithm for Multibeam Echosounder Survey Efficiency and Accuracy


Abstract
:1. Introduction
- A new multibeam echosounder model was developed utilizing geometric optimization techniques, significantly enhancing measurement accuracy and data integrity, particularly in complex seabed terrains.
- An optimized multibeam measurement algorithm was designed capable of dynamically adjusting survey line configurations in regions requiring frequent measurements, thus improving efficiency and reducing data overlap and resource wastage.
- The performance of multibeam echosounding technology in practical applications was enhanced, providing critical support for marine science research and seabed resource exploration.
2. Research Content and Methodology
2.1. Coverage and Measurement Accuracy Standards
2.2. Methodology
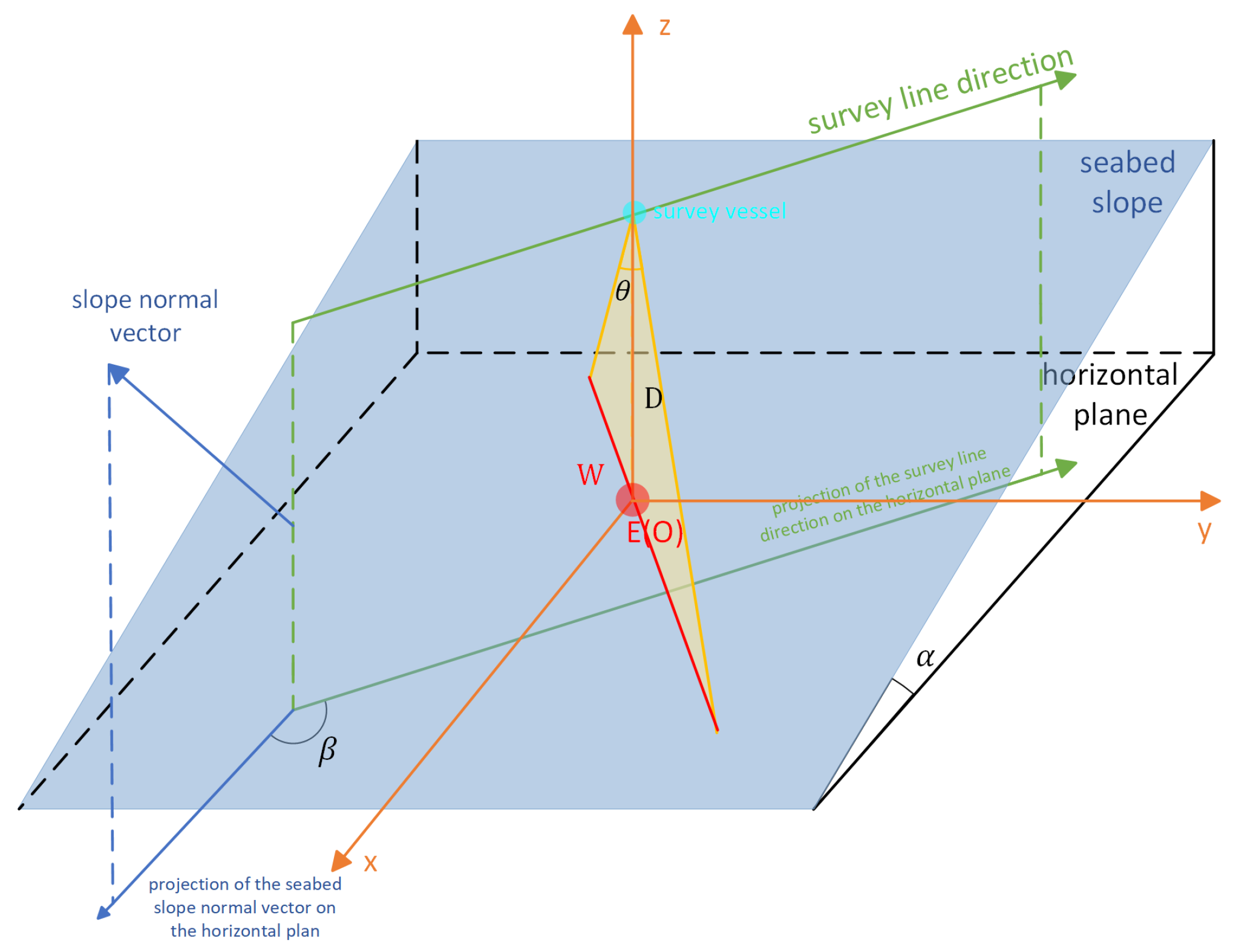
2.2.1. Precision Measurement Optimization Model
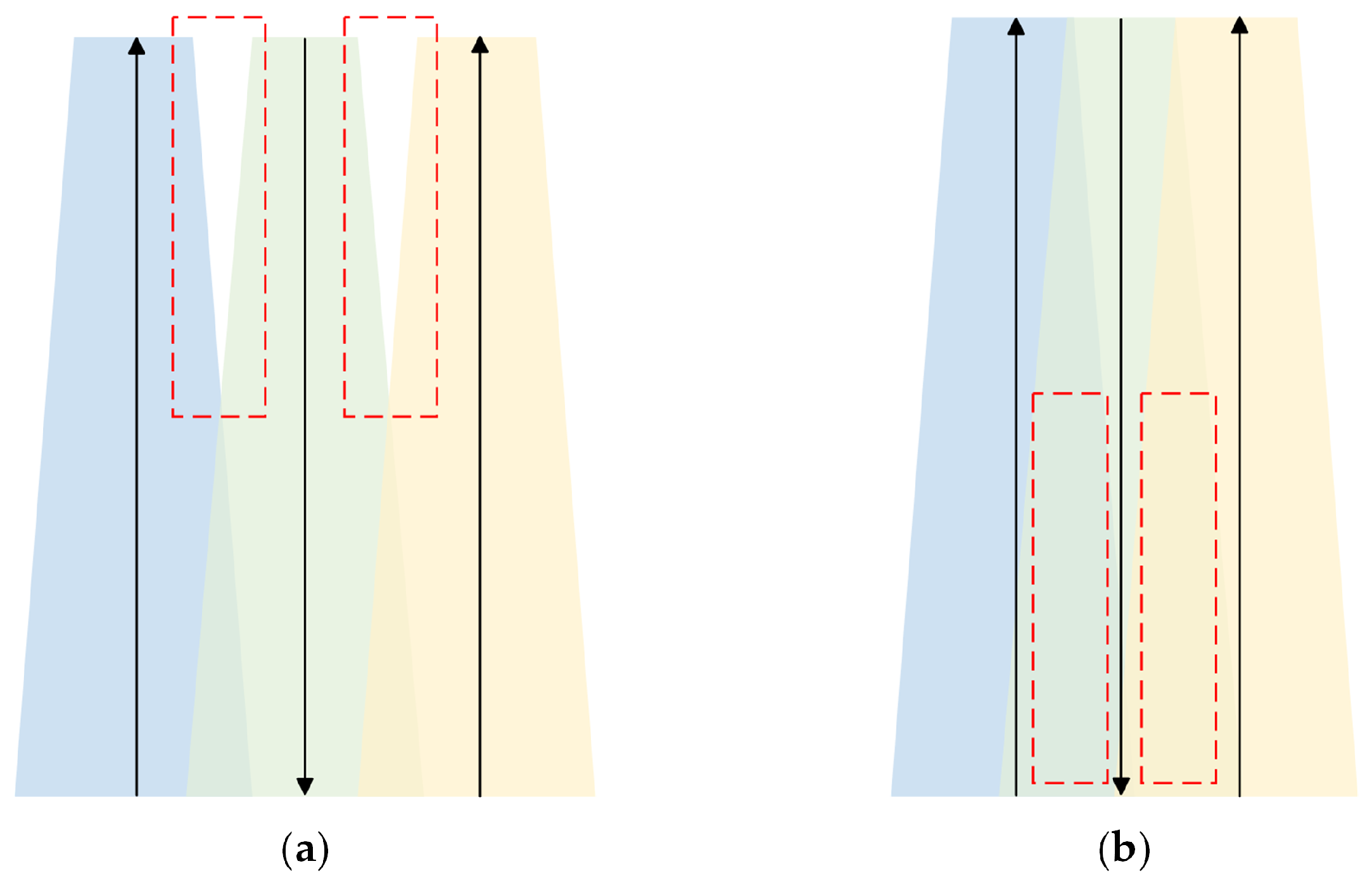
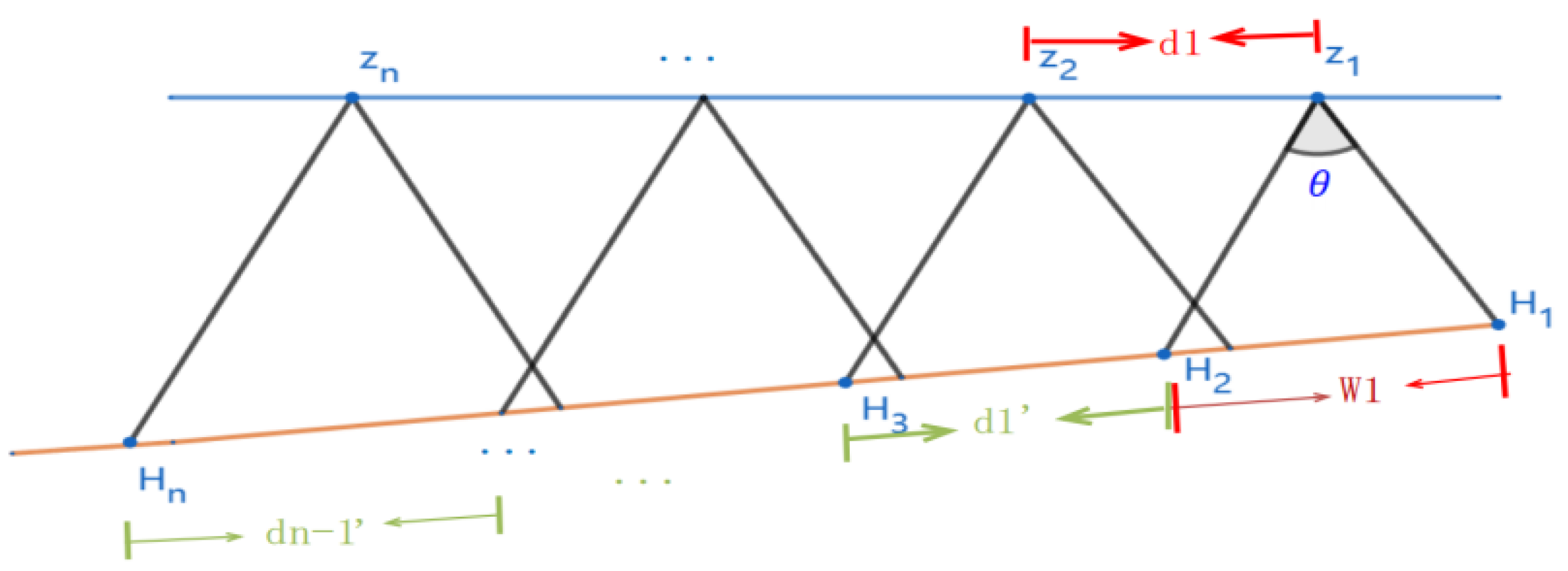
2.2.2. Complex Area Survey Line Optimization Model
3. Results and Comparative Experiments
3.1. Datasets and Experimental Environment
3.2. Evaluation Metrics
- Effective Coverage Area: The total geographical area covered and effectively scanned by the survey lines, measured in square meters.
- Coverage Rate [25]: The ratio of the effective coverage area to the total area of the survey region, serving as a key indicator of the model’s actual coverage within the marine area.
- Total Survey Line Length: The sum of all survey line lengths, measured in meters, reflecting the efficiency of the survey model. The formula for calculating the average survey line length is:
- Weighted Average Overlap Rate: The weighted average value of the overlap rates between each survey line. It indicates the redundancy in the overlapping regions during the survey. The formula for calculating the weighted average overlap rate is:
3.3. Experimental Results and Comparative Experiments
3.4. Model Robustness Analysis
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Derivation of the Precision Measurement Optimization Model
Appendix A.1. Derivation of Equations (1) and (2)

Appendix A.2. Derivation of Equation (3)
Appendix B. Derivation of the Complex Marine Area Survey Line Optimization Model
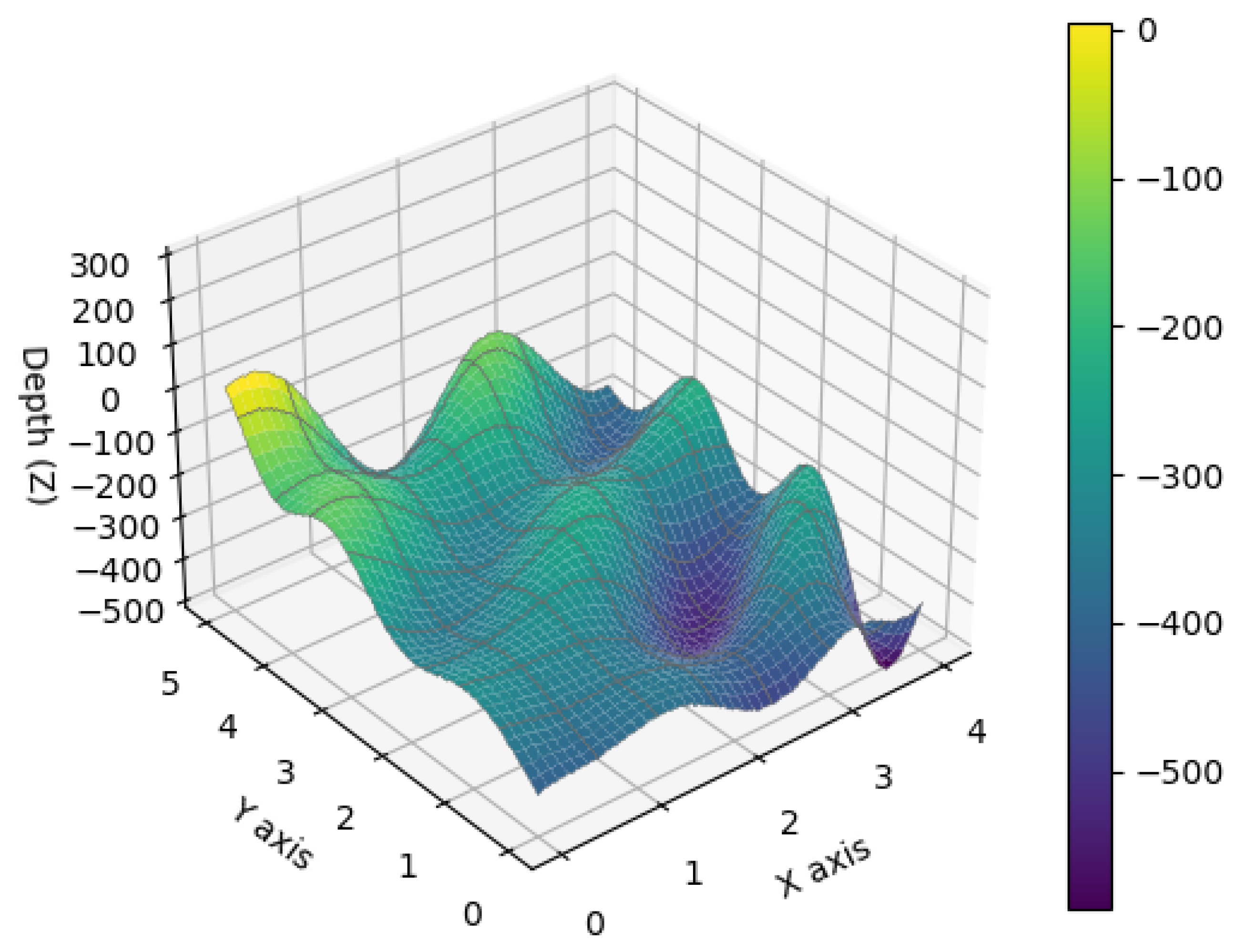
Appendix B.1. Seabed Coordinate Data of the Marine Area

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | |
|---|---|---|---|---|---|---|---|
| 1 | −419.519 | −418.317 | −414.532 | −411.712 | −411.083 | −411.856 | −410.857 |
| 2 | −416.148 | −415.537 | −411.993 | −410.414 | −410.186 | −409.167 | −410.403 |
| 3 | −411.267 | −410.704 | −408.855 | −409.708 | −406.032 | −409.945 | −407.646 |
| 4 | −407.436 | −408.972 | −405.738 | −407.693 | −404.474 | −402.182 | −402.857 |
| 5 | −407.433 | −401.795 | −402.713 | −402.887 | −402.613 | −400.351 | −397.257 |
| 6 | −401.516 | −402.432 | −398.618 | −400.311 | −401.117 | −400.850 | −396.713 |
| 7 | −399.641 | −398.642 | −398.293 | −404.488 | −395.189 | −395.352 | −397.226 |
| 8 | −397.070 | −396.186 | −394.851 | −390.699 | −391.679 | −396.517 | −394.961 |
| 9 | −392.621 | −395.804 | −394.211 | −394.150 | −390.677 | −387.531 | −392.386 |
| 10 | −390.828 | −390.449 | −389.131 | −388.218 | −389.258 | −388.942 | −387.434 |
Appendix B.2. Derivation of Model 2 in Section 2.2.2
References
- Casalbore, D. Multibeam Echosounder. In Remote Sensing for Characterization of Geohazards and Natural Resources; Springer International Publishing: Cham, Switzerland, 2024; pp. 159–169. [Google Scholar]
- Abbot, P.; Dyer, I. Sonar Performance Predictions Incorporating Environmental Variability. In Impact of Littoral Environmental Variability on Acoustic Predictions and Sonar Performance; Springer: Dordrecht, The Netherlands, 2002; pp. 611–618. [Google Scholar]
- Swain, J.; Umesh, P.A.; Harikrishnan, M. Role of Oceanography in Naval Defence. Indian J. Geo-Mar. Sci. 2010, 39, 631–645. [Google Scholar]
- Williamson, B.J.; Blondel, P.; Williamson, L.D.; Scott, B.E. Application of a Multibeam Echosounder to Document Changes in Animal Movement and Behaviour around a Tidal Turbine Structure. ICES J. Mar. Sci. 2021, 78, 1253–1266. [Google Scholar] [CrossRef]
- Trenkel, V.M.; Mazauric, V.; Berger, L. The New Fisheries Multibeam Echosounder ME70: Description and Expected Contribution to Fisheries Research. ICES J. Mar. Sci. 2008, 65, 645–655. [Google Scholar] [CrossRef]
- Brown, C.J.; Blondel, P. Developments in the Application of Multibeam Sonar Backscatter for Seafloor Habitat Mapping. Appl. Acoust. 2009, 70, 1242–1247. [Google Scholar] [CrossRef]
- Pratomo, D.G.; Saputro, I. Comparative Analysis of Singlebeam and Multibeam Echosounder Bathymetric Data. Proc. Iop Conf. Ser. Mater. Sci. Eng. 2021, 1052, 012015. [Google Scholar]
- Hughes Clarke, J.E. Multibeam Echosounders. Submar. Geomorphol. 2018, 25, 25–41. [Google Scholar]
- Maleika, W. Development of a Method for the Estimation of Multibeam Echosounder Measurement Accuracy. Prz. Elektrotechniczny 2012, 2, 4. [Google Scholar]
- Singh, N.K.; Morgan, R. Blue Stream Survey: Deepwater Challenge. In Proceedings of the Offshore Technology Conference, OTC, Houston, TX, USA, 30 April–3 May 2001. OTC-13156-MS. [Google Scholar]
- Zhu, W.L.; Zhong, K.; Li, Y.C.; Xu, Q.; Fang, D.Y. Characteristics of Hydrocarbon Accumulation and Exploration Potential of the Northern South China Sea Deepwater Basins. Chin. Sci. Bull. 2012, 57, 3121–3129. [Google Scholar] [CrossRef]
- Rahman, C.; Tsamenyi, M. A Strategic Perspective on Security and Naval Issues in the South China Sea. In Maritime Issues in the South China Sea; Routledge: London, UK, 2013; pp. 35–53. [Google Scholar]
- Ferreira, I.O.; Andrade, L.C.; Teixeira, V.G.; Santos, F.C.M. State of art of bathymetric surveys. Bol. Ciências Geodésicas 2022, 28, e2022002. [Google Scholar] [CrossRef]
- Parkinson, F.; Douglas, K.; Li, Z. A Generalized Semiautomated Method for Seabed Geology Classification Using Multibeam Data and Maximum Likelihood Classification. J. Coast. Res. 2024, 40, 1–16. [Google Scholar] [CrossRef]
- Hakim, A.M.M.; Che, R.H.; Md, N.S.; Said, M.S.M.; Razali, R. Marine Habitat Mapping using Multibeam Echosounder Survey and Underwater Video Observations: A Case Study from Tioman Marine Park. IOP Conf. Ser. Earth Environ. Sci. 2023, 1240, 012006. [Google Scholar]
- Abubakari, A.; Poerbandono, P. Effectiveness of Vertical Error Budget Model for Portable Multi-beam Echo-Sounder in Shallow Water Bathymetric Survey. IOP Conf. Ser. Earth Environ. Sci. 2023, 1245, 012041. [Google Scholar] [CrossRef]
- Wang, F.; Ma, Y. Design and Implementation of Polar Ocean Multibeam Survey Line Layout System. Mar. Inf. Technol. Appl. 2023, 38, 158–162+186. [Google Scholar]
- Dong, Y. Application Research of Multibeam Echosounder System in Marine Channel Measurement. Eng. Technol. Res. 2023, 8, 122–124. [Google Scholar] [CrossRef]
- Hao, R.J.; Wan, X.Y.; Sui, X.H.; Jia, Y.J.; Wu, X. Current Status and Accuracy Analysis of Seafloor Terrain Detection and Model Development. Earth Planet. Phys. (Rev.) 2022, 53, 172–186. [Google Scholar] [CrossRef]
- Melnychuk, M.C.; Christensen, V. Methods for Estimating Detection Efficiency and Tracking Acoustic Tags with Mobile Transect Surveys. J. Fish Biol. 2009, 75, 1773–1794. [Google Scholar] [CrossRef] [PubMed]
- Kielland, P.; Dagbert, M. The Use of Spatial Statistics in Hydrography. Int. Hydrogr. Rev. 1992, LXIX, 71–92. [Google Scholar]
- Lü, L.; Xu, Z. Analytical Geometry, 5th ed.; Higher Education Press: Beijing, China, 2019. [Google Scholar]
- Kalaimaran, A. Some New Geometrical Theorems on Various Parameters of an Ellipse. Int. J. Phys. Math. Sci. 2014, 4, 19–33. [Google Scholar]
- Sard, A. Linear Approximation; American Mathematical Society: Providence, RI, USA, 1963. [Google Scholar]
- Strahler, A.H.; Boschetti, L.; Foody, G.M.; Friedl, M.A.; Hansen, M.C.; Herold, M.; Mayaux, P.; Morisette, J.T.; Stehman, S.V.; Woodcock, C.E. Global Land Cover Validation: Recommendations for Evaluation and Accuracy Assessment of Global Land Cover Maps. Eur. Communities Luxemb. 2006, 51, 1–60. [Google Scholar]
- Mohammadloo, H.; Snellen, T.; Simons, G. Assessing the Performance of the Multi-Beam Echo-Sounder Bathymetric Uncertainty Prediction Model. Appl. Sci. 2020, 10, 4671. [Google Scholar] [CrossRef]
- Zhou, P.; Chen, J.; Wang, S. A Dual Robust Strategy for Removing Outliers in Multi-Beam Sounding to Improve Seabed Terrain Quality Estimation. Sensors 2024, 24, 1476. [Google Scholar] [CrossRef] [PubMed]
- Maleika, W. Local Polynomial Interpolation Method Optimization in the Process of Digital Terrain Model Creation Based on Data Collected from a Multibeam Echosounder. IEEE J. Ocean. Eng. 2024, 49, 931–932. [Google Scholar] [CrossRef]
- Sommerville, D.M.Y. Analytical Geometry of Three Dimensions; CUP Archive: Cambridge, UK, 1951. [Google Scholar]
- Davenport, P.B. A Vector Approach to the Algebra of Rotations with Applications; National Aeronautics and Space Administration: Washington, DC, USA, 1968.
- Gray, A. Vector Cross Products on Manifolds. Trans. Am. Math. Soc. 1969, 141, 465–504. [Google Scholar] [CrossRef]



| CASLOM Model | Effective Coverage Area (m2) | Coverage Rate (%) | Total Survey Line Length (m) | Weighted Average Overlap Rate (%) |
|---|---|---|---|---|
| Dataset 1 | 94.95 | 470,527 | 3.12 | |
| Dataset 2 | 95.02 | 476,893 | 3.19 | |
| Dataset 3 | 94.89 | 474,671 | 3.21 | |
| Dataset 4 | 95.01 | 479,438 | 3.35 | |
| Dataset 5 | 94.96 | 474,792 | 3.25 | |
| Dataset 6 | 95.03 | 474,556 | 3.22 | |
| Dataset 7 | 94.92 | 475,847 | 3.16 | |
| Dataset 8 | 95.06 | 471,572 | 2.94 |
| Model | Average Effective Coverage Area (m2) | Average Coverage Rate (%) | Average Survey Line Length (m) | Weighted Average Overlap Rate (%) |
|---|---|---|---|---|
| AMUST | 88.56 | 528,235 | 12.24 | |
| DRS | 86.95 | 545,410 | 10.84 | |
| LPIOM | 87.27 | 559,507 | 11.58 | |
| Baseline | 73.03 | 101,860 | −5.42 | |
| Our Model | 94.98 | 474,662 | 3.18 |
| Elevation Change (m) | −300 | −150 | 0 | +150 | +300 |
|---|---|---|---|---|---|
| Effective Coverage Area (m2) | 1.2443 × 108 | 1.2659 × 108 | 1.3039 × 108 | 1.2944 × 108 | 1.2935 × 108 |
| Coverage Rate (%) | 92.43% | 92.80% | 95.25% | 94.89% | 94.82% |
| Total Survey Line Length (m) | 492,572 | 493,723 | 494,387 | 495,621 | 495,876 |
| Weighted Average Overlap Rate (%) | 9.92 | 8.67 | 7.51 | 10.53 | 11.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Xu, J.; Zhong, Y.; Lin, H. Enhancing Marine Topography Mapping: A Geometrically Optimized Algorithm for Multibeam Echosounder Survey Efficiency and Accuracy. Appl. Sci. 2024, 14, 8875. https://doi.org/10.3390/app14198875
Lu Y, Xu J, Zhong Y, Lin H. Enhancing Marine Topography Mapping: A Geometrically Optimized Algorithm for Multibeam Echosounder Survey Efficiency and Accuracy. Applied Sciences. 2024; 14(19):8875. https://doi.org/10.3390/app14198875
Chicago/Turabian StyleLu, Yi, Juangui Xu, Yubin Zhong, and Hongbin Lin. 2024. "Enhancing Marine Topography Mapping: A Geometrically Optimized Algorithm for Multibeam Echosounder Survey Efficiency and Accuracy" Applied Sciences 14, no. 19: 8875. https://doi.org/10.3390/app14198875