
Characterization of Hydraulic Spool Clamping Triggered by Solid Particles Based on Mechanical Model and Experiment Research

Abstract
1. Introduction
1.1. Study of Solid Particles in Hydraulically Contaminated Fluids
1.2. Modeling of Solid Particle Wear on Hydraulic Valves
1.3. Study of Spool Clamping
1.4. Summary
2. Materials and Methods
2.1. Establishment of Mechanical Model
2.1.1. Fundamental Theories
2.1.2. Mathematical Model of Spool Clamping Risk Zone Ai
2.1.3. Calculation of the Number of Sensitive Particles n, and Deduction of the Expressions of Joint Force Fclamping and Single Force σi
2.2. Experiment Design and Result Analysis
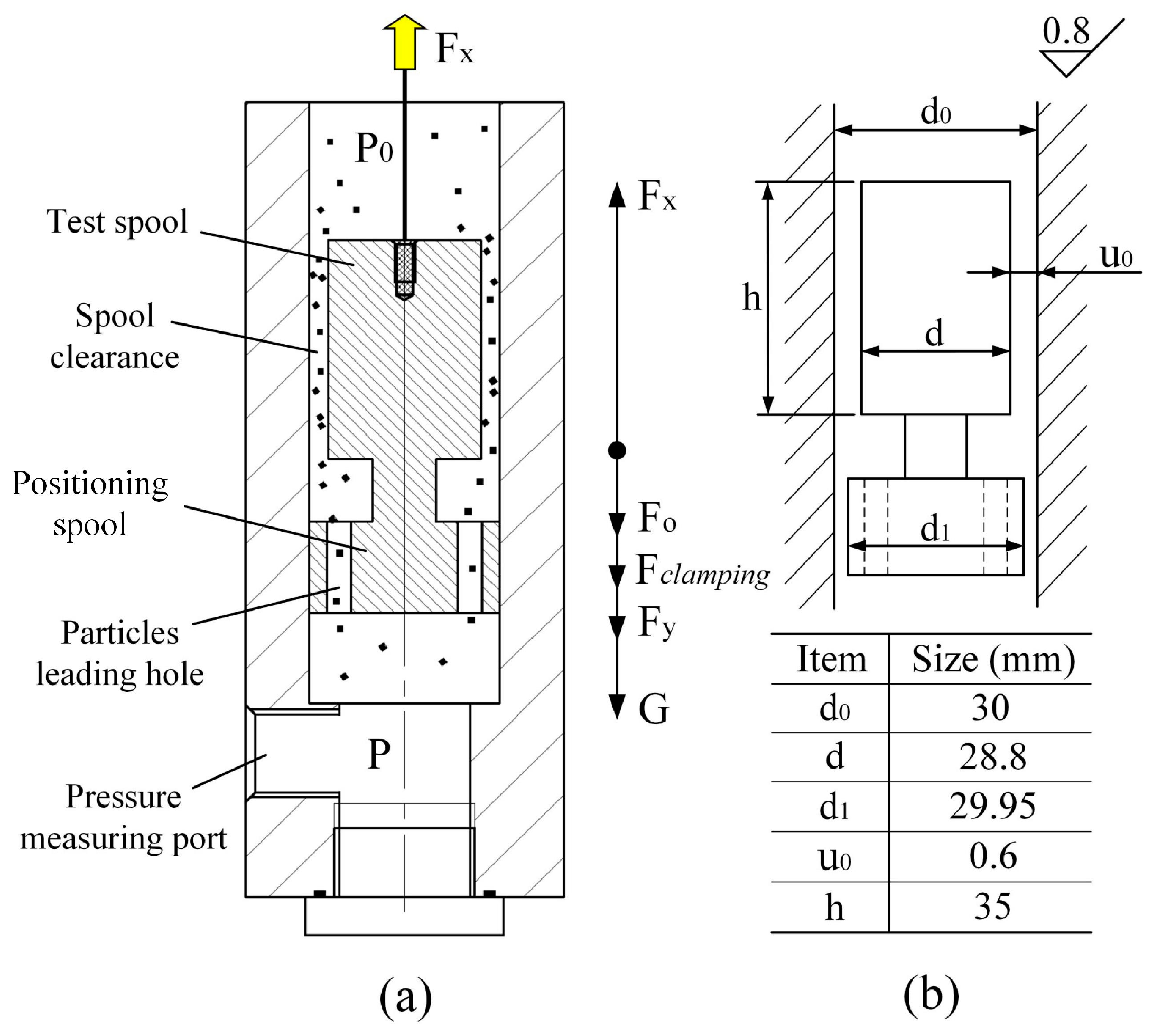
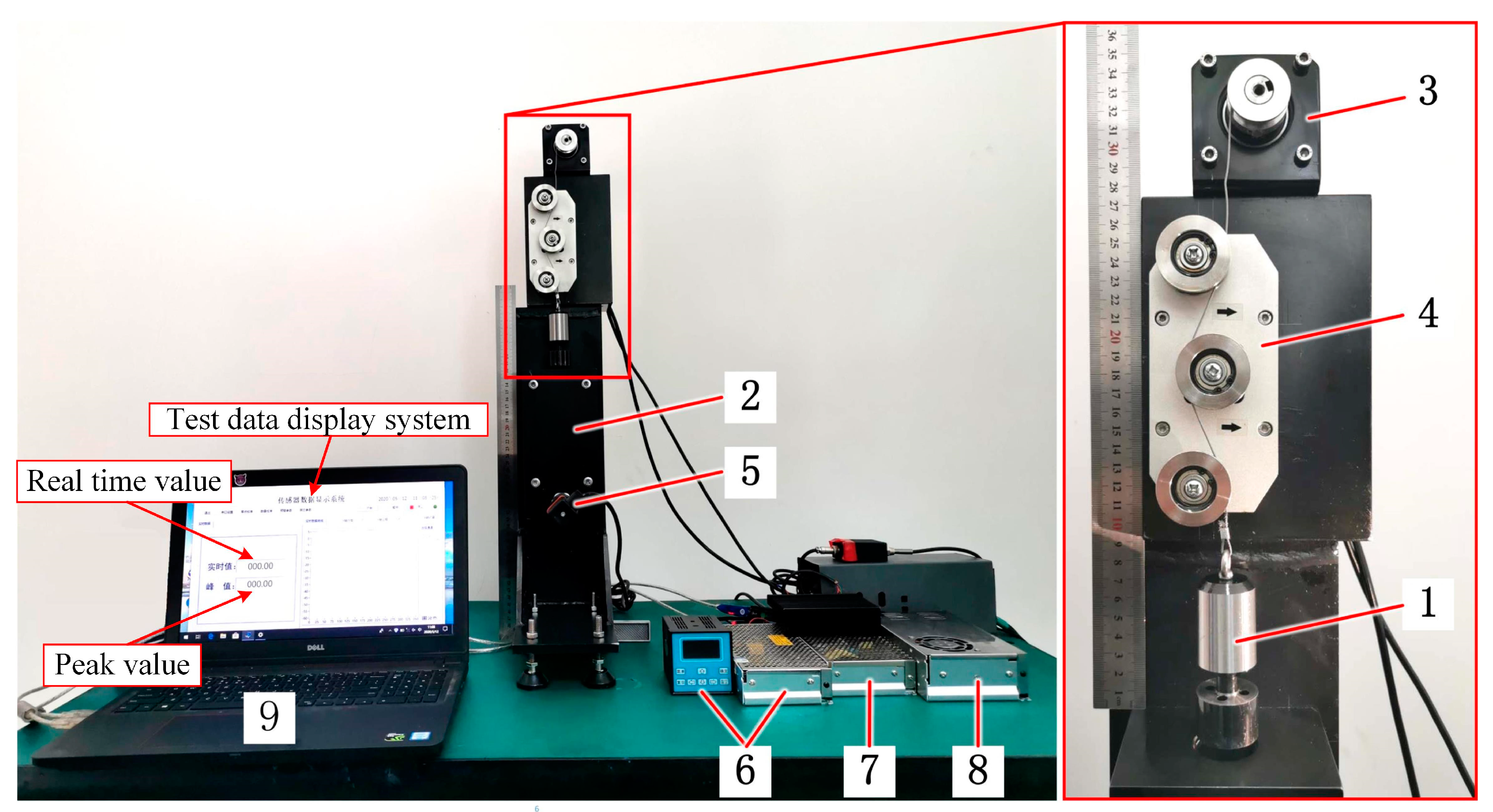
2.2.1. Design of Experimental Device and Method
2.2.2. Influences of Particle Kinds on Clamping Force
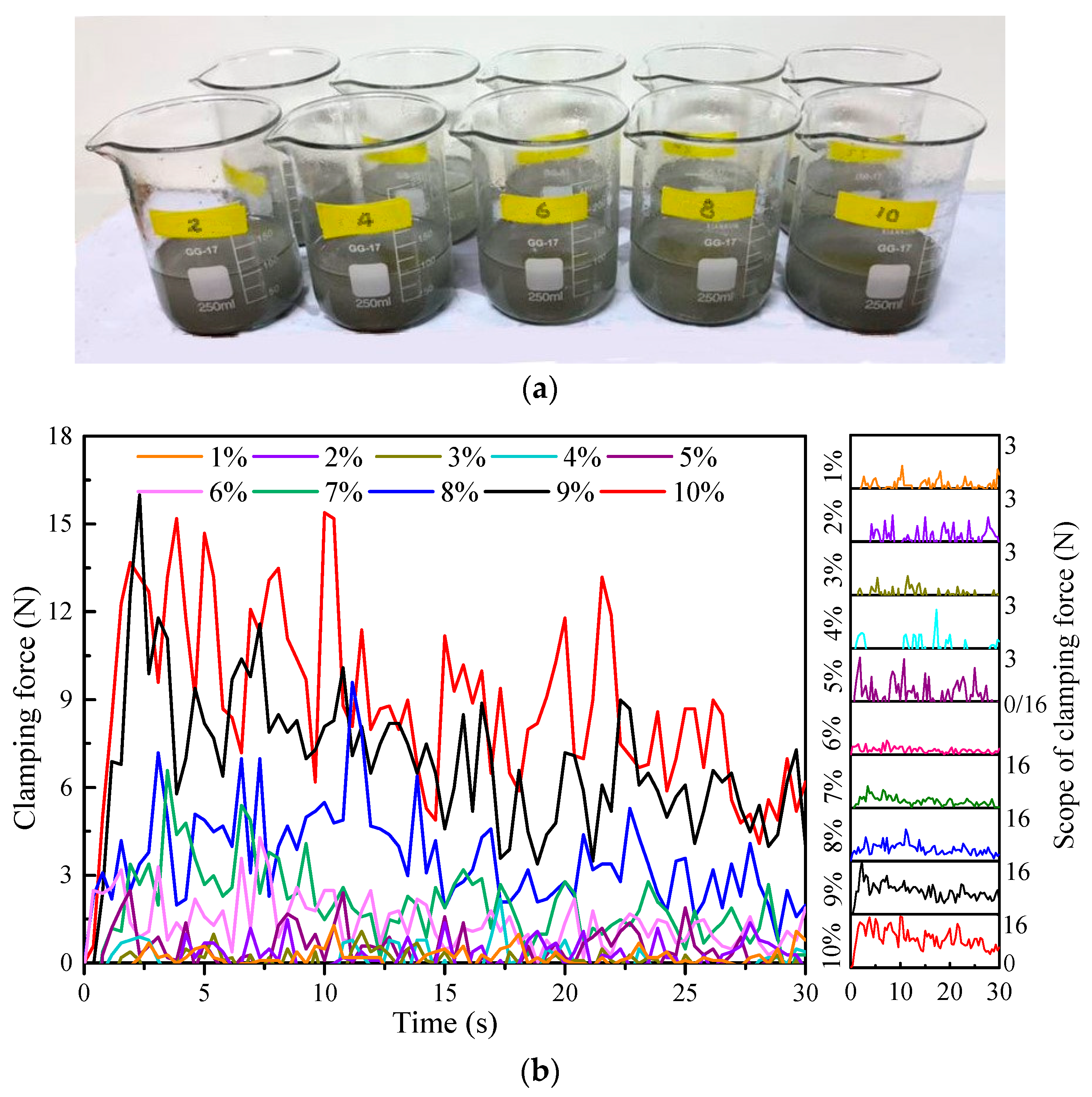
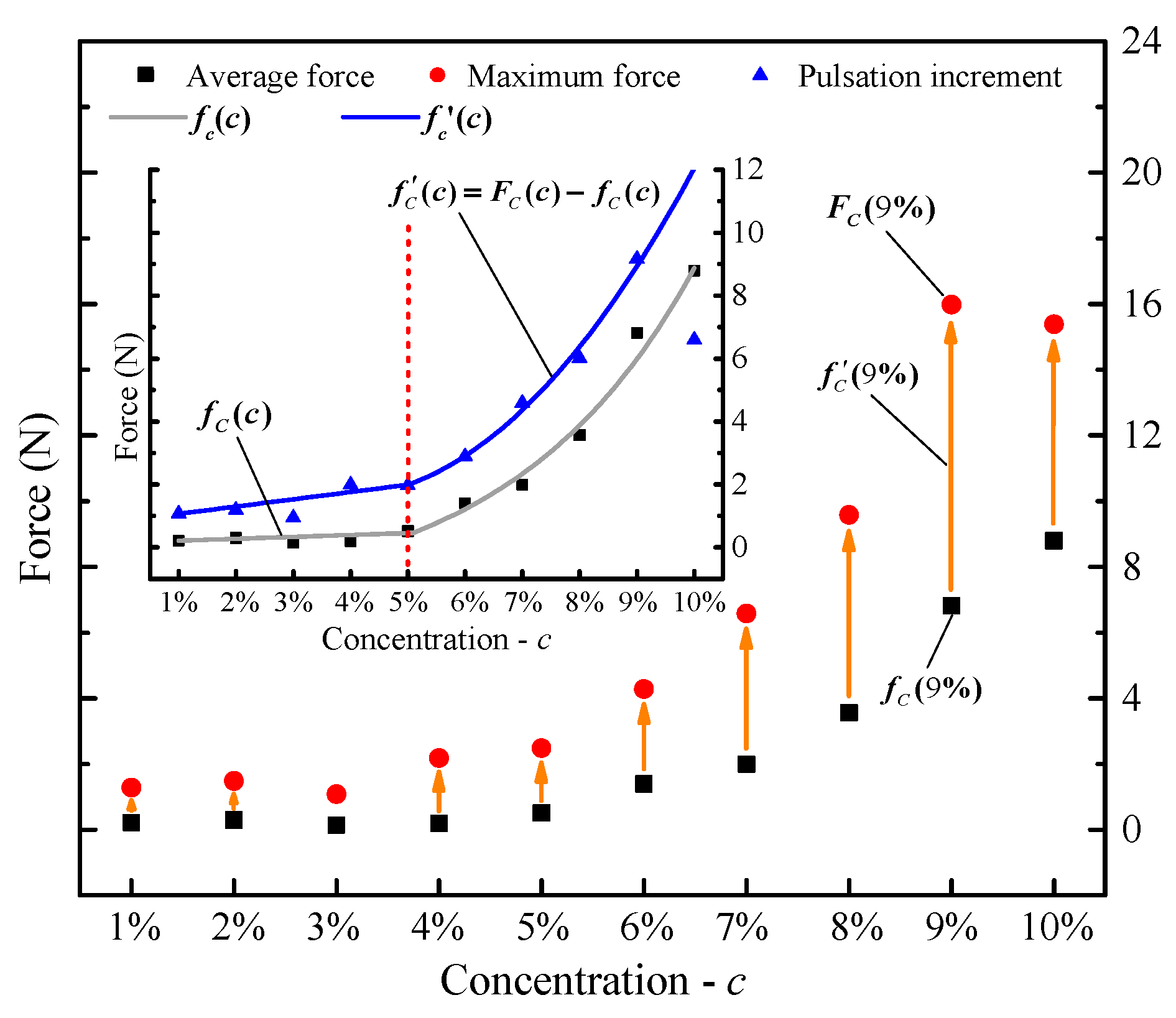
2.2.3. Influences of Particle Concentration on Clamping Force
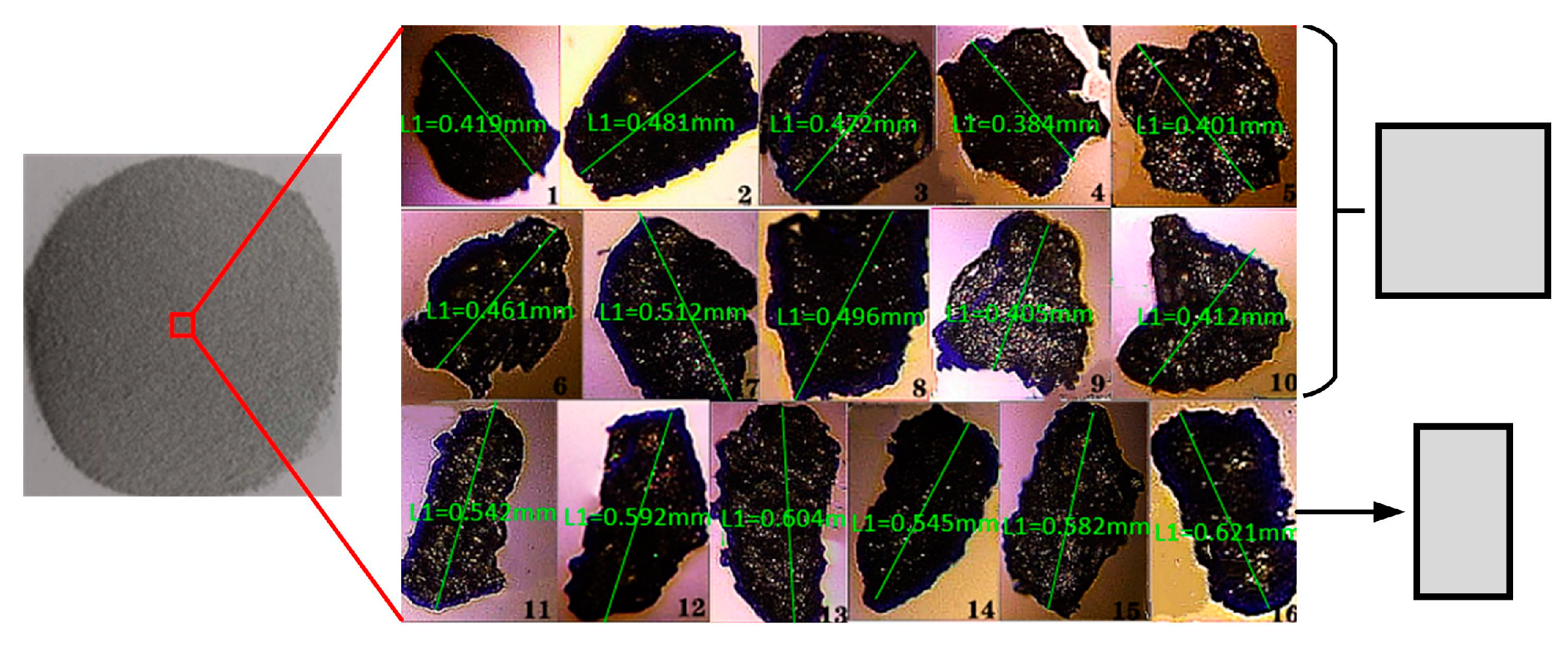
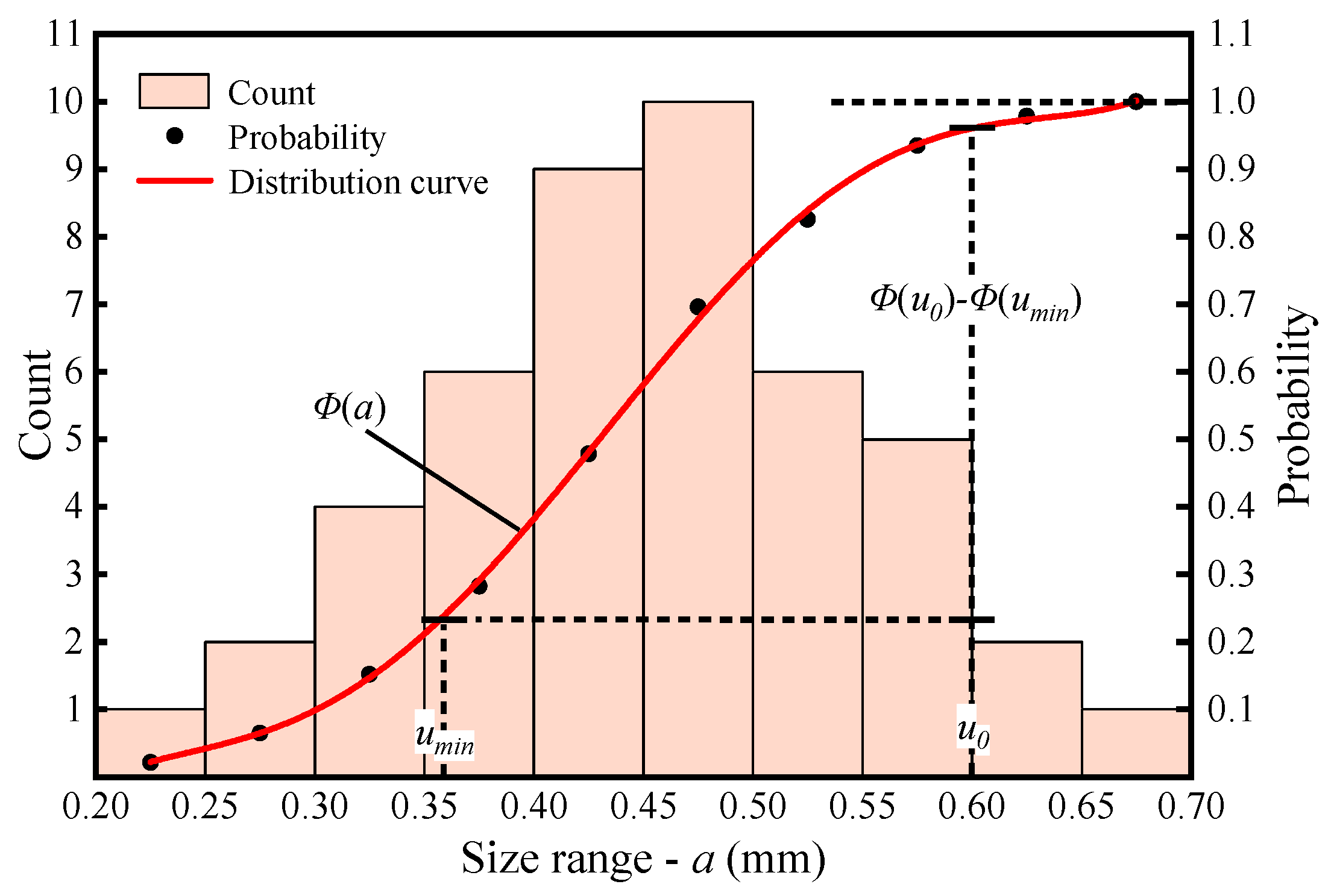
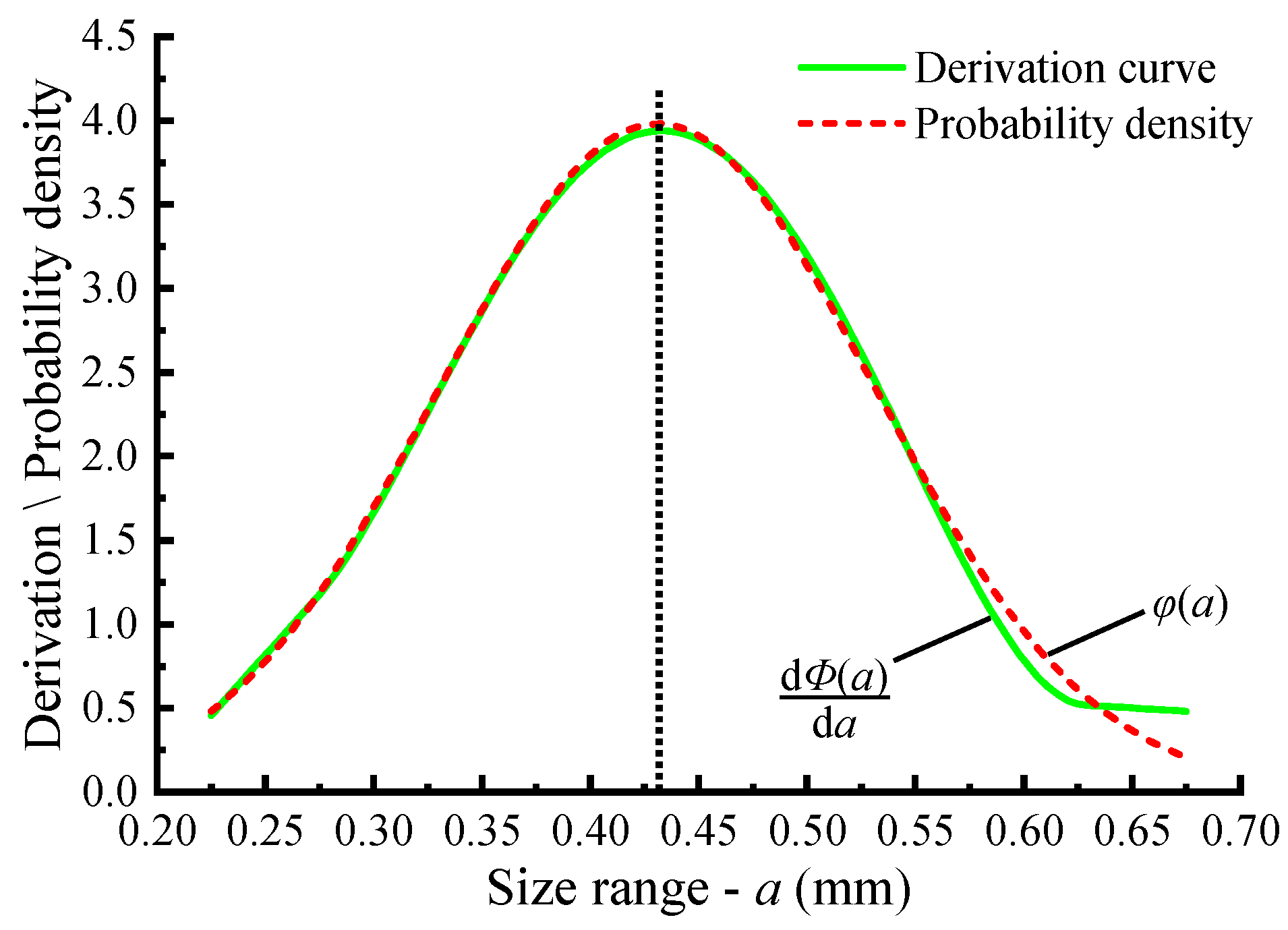
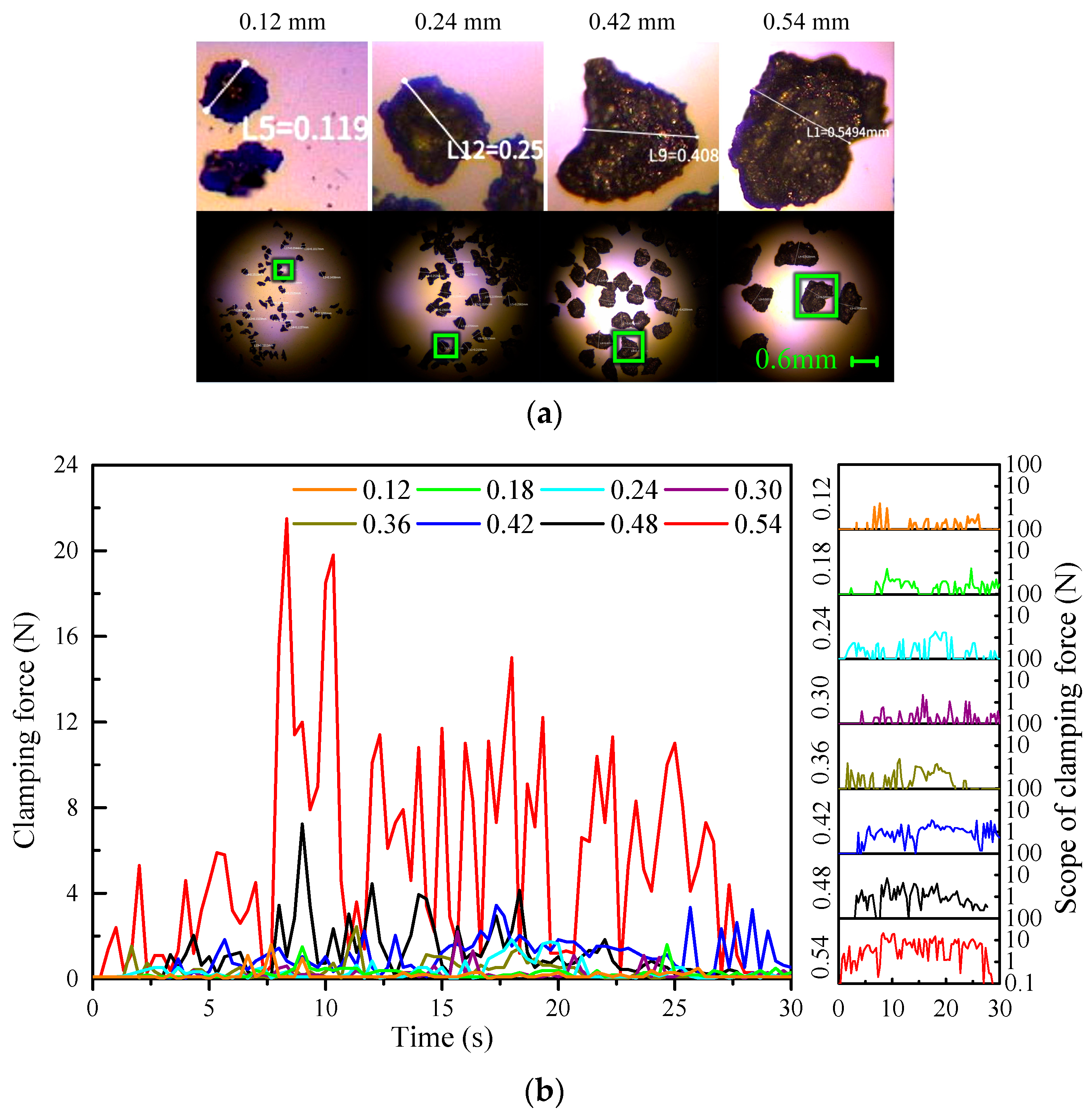
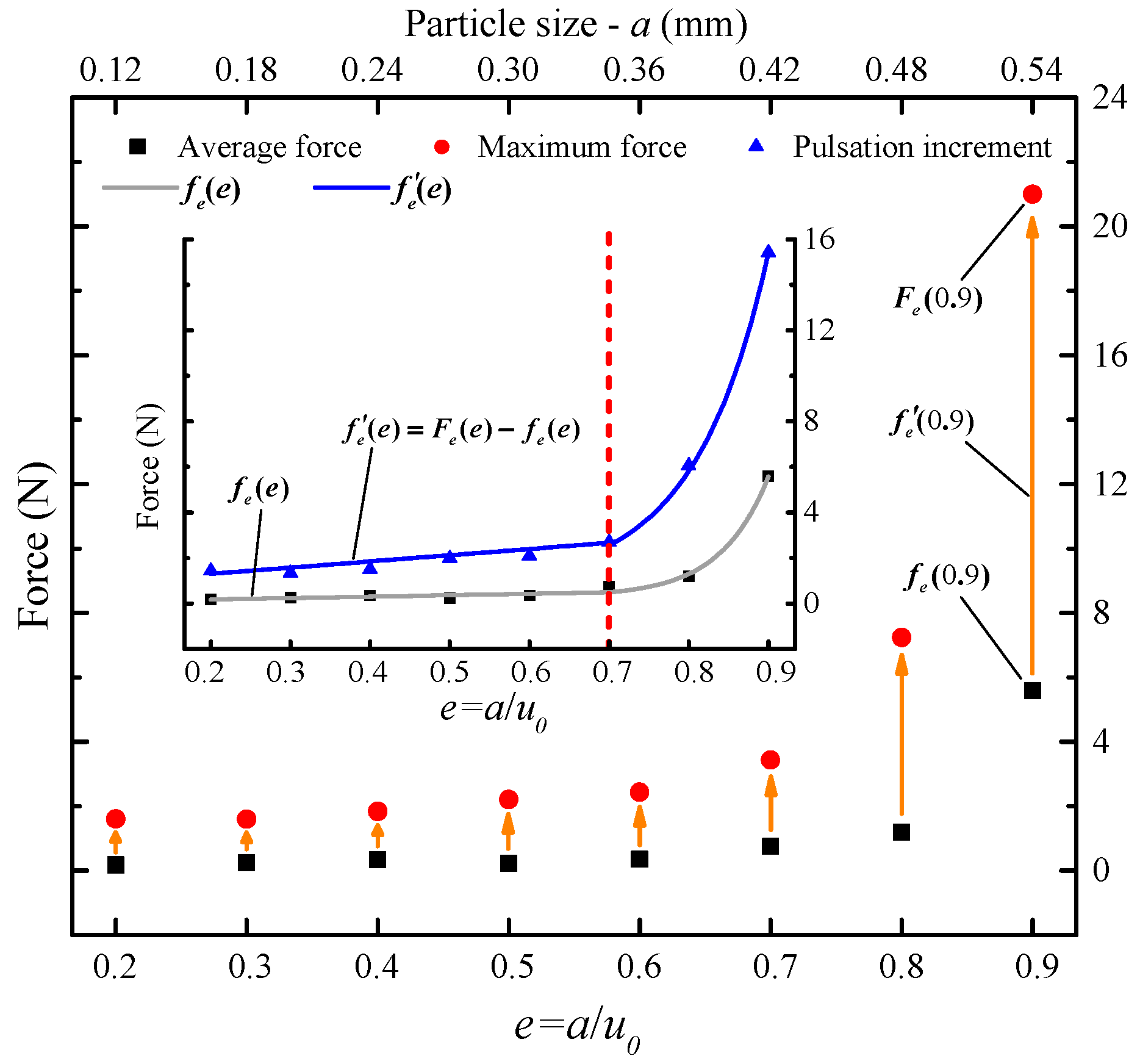
2.2.4. Influences of Particle Size on the Clamping Force
3. Conclusions
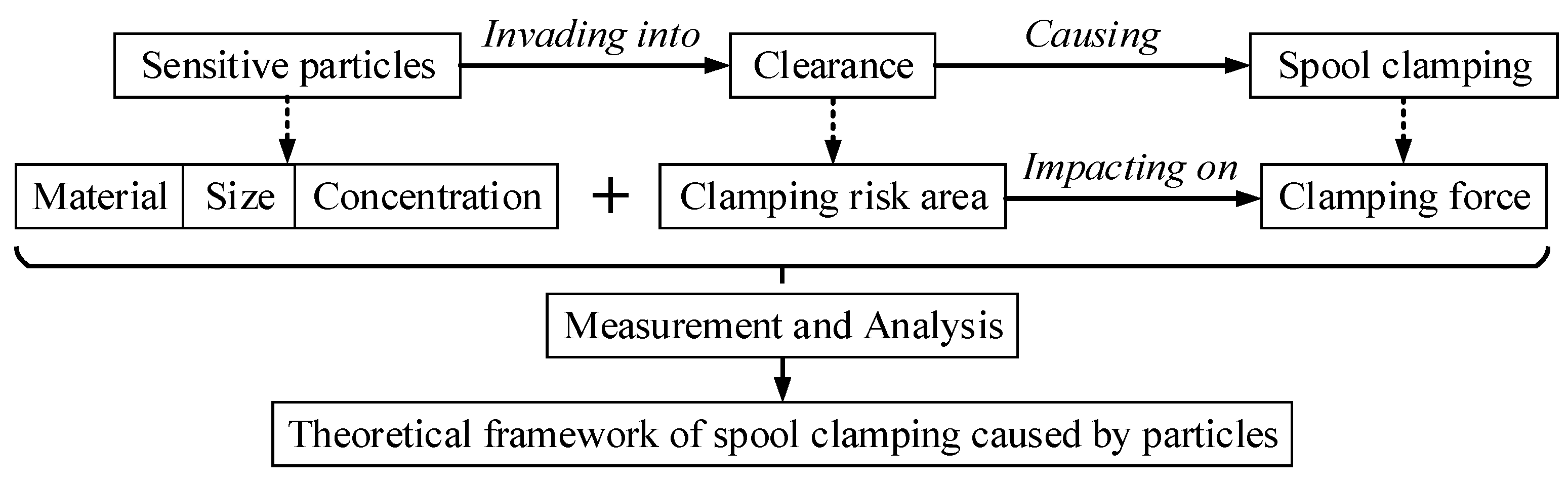
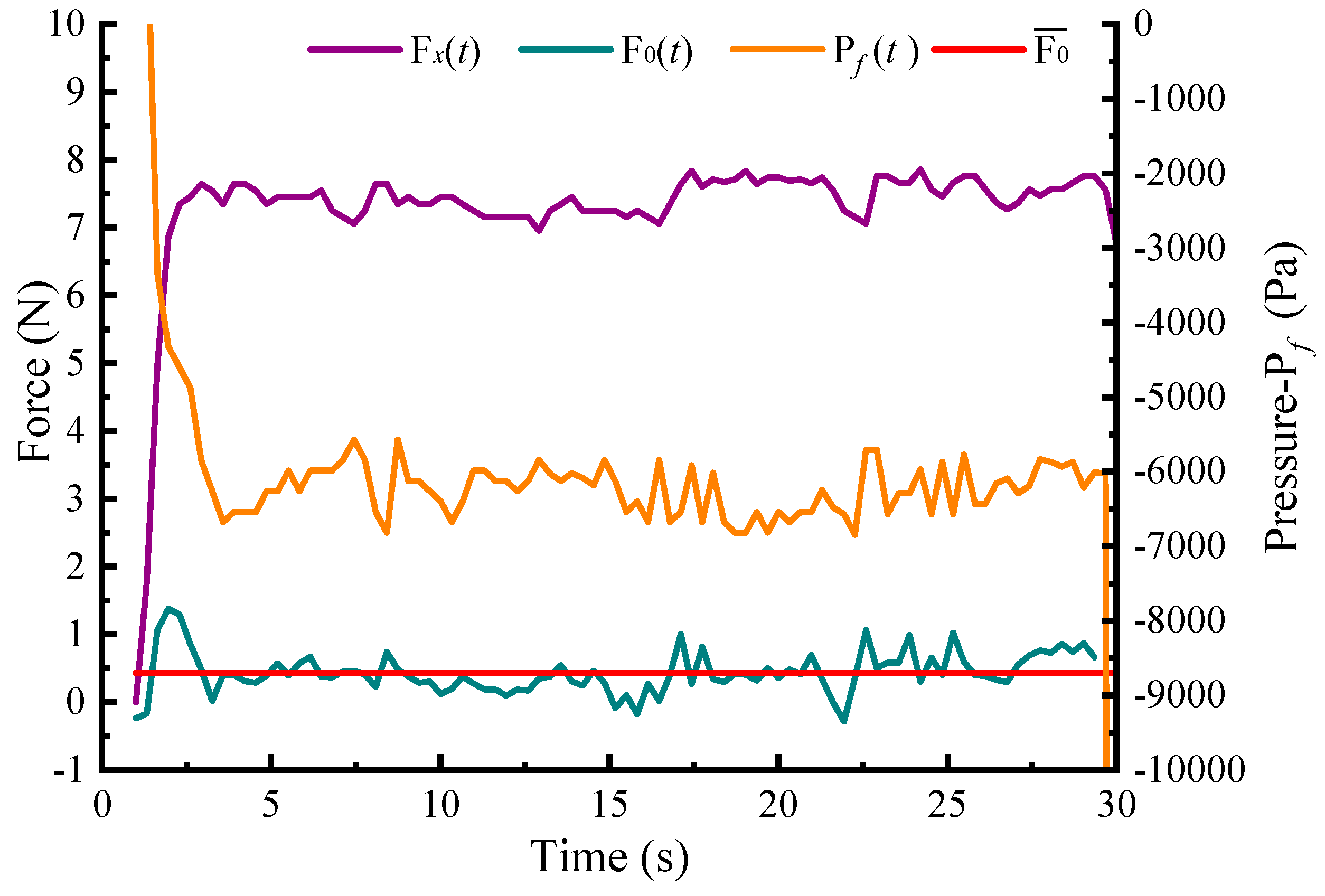
- The clamping force of spool triggered by solid particles can be considered as a stacking effect of each tiny particle, which is mainly correlated with the material, size, and concentration of particles. However, because of the rotation of particles and varying posture of the spool, the clamping force presents a pattern of aperiodic pulsation; the cause of spool pulsation is the rotation of the particles and changes in the spool postures.
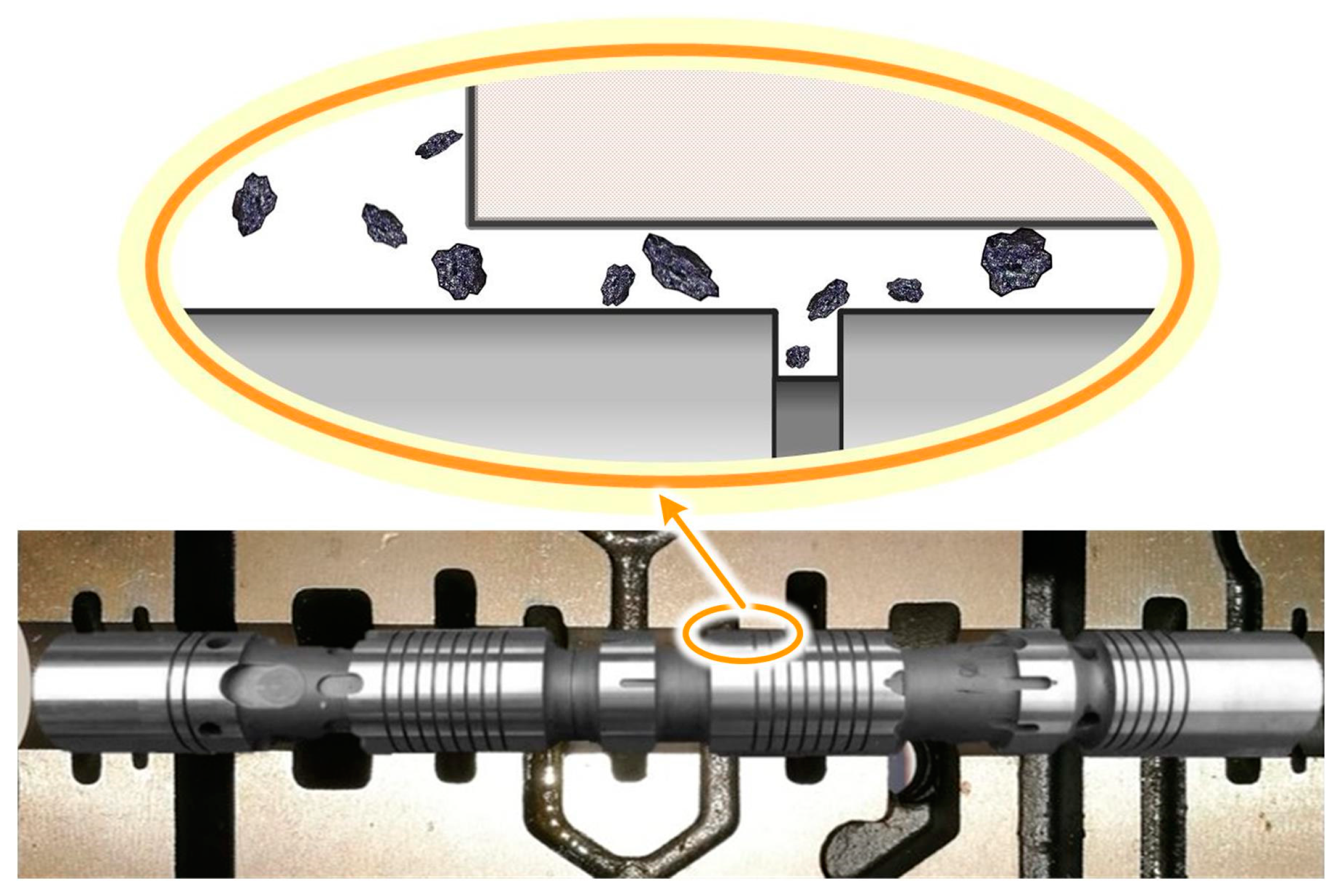
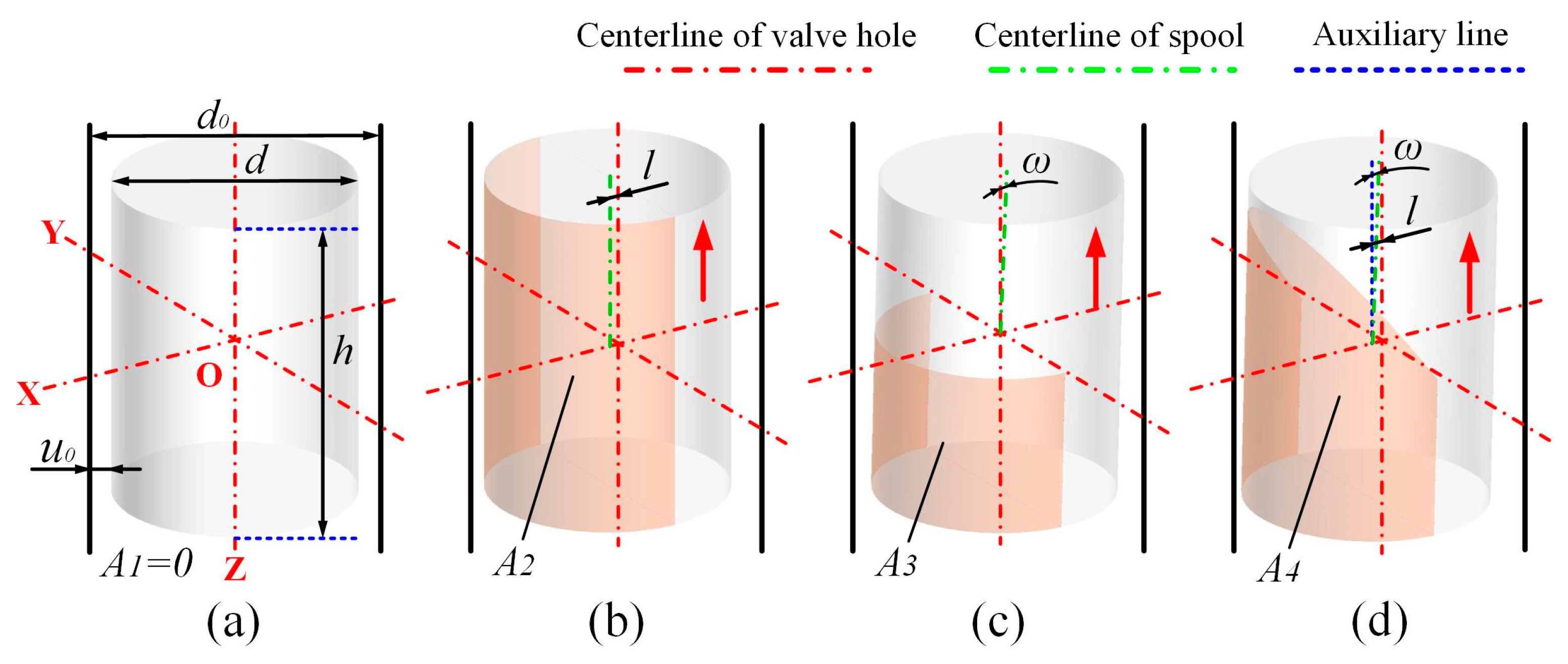
- After the incursion of particles into the valve clearance, the second action of spools will lead to spool clamping as the spool posture has changed. The imperfect posture of a spool in a valve hole is mainly off-centered, tilt, or off-centered + tilt. The different postures bring about clamping risk zones in the valve clearance.
- The kinds of particles have a certain but limited effect on the spool clamping force. In general, particles with a larger elastic modulus give rise to a stronger spool clamping force, and also give rise to pulsation frequency. This accords with the physical model that we employed in this study.
- A larger volume fraction of particles in hydraulic oil implies an increasing number of sensitive particles and a stronger spool clamping force thus engendered. Spools bear a considerably increased risk of clamping when the particle volume concentration is higher than the “sensitive concentration” of 5%, and the clamping force increases rapidly in the manner of a quadratic curve with concentration. When the concentration is 9%, the maximum clamping force can reach 21.5 N, which will lead to a higher risk of spool clamping.
- Within a certain size range, the probability density distribution of particle size conforms to the normal distribution function. The “sensitive particles” are proven to take up 0.7–1 of the valve clearances. When the ratio of particle size to clearance size is larger than 0.7, the clamping force increases rapidly in the manner of a quadratic curve. When the ratio is 0.9, the maximum clamping force can reach 15.98 N, which may lead to a higher risk of spool clamping.
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rodríguez-Pérez, A.M.; Rodríguez-González, C.A.; López, R.; Hernández-Torres, J.A.; Caparrós-Mancera, J.J. Water Microturbines for Sustainable Applications: Optimization Analysis and Experimental Validation. Water Resour Manag. 2024, 38, 1011–1025. [Google Scholar] [CrossRef]
- Novak, N.; Trajkovski, A.; Kalin, M.; Majdič, F. Degradation of hydraulic system due to wear particles or medium test dust. Appl. Sci. 2023, 13, 7777. [Google Scholar] [CrossRef]
- Liu, X.; Ji, H.; Min, W.; Zheng, Z.; Wang, J. Erosion behavior and influence of solid particles in hydraulic spool valve without notches. Eng. Fail. Anal. 2020, 108, 104262. [Google Scholar] [CrossRef]
- Frith, R.H.; Scott, W. Control of solids contamination in hydraulic systems—An overview. Wear 1993, 165, 69–74. [Google Scholar] [CrossRef]
- Singh, M.; Lathkar, G.S.; Basu, S.K. Failure Prevention of Hydraulic System Based on Oil Contamination. J. Inst. Eng. 2012, 93, 269–274. [Google Scholar] [CrossRef]
- Uy, D.; Simko, S.J.; Carter, R.O., III; Jensen, R.K.; Gangopadhyay, A.K. Characterization of anti-wear films formed from fresh and aged engine oils. Wear 2007, 263, 1165–1174. [Google Scholar] [CrossRef]
- Edmonds, J.; Resner, M.S.; Shkarlet, K. Detection of precursor wear debris in lubrication systems. In Proceedings of the 2000 IEEE Aerospace Conference. Proceedings (Cat. No.00TH8484), Big Sky, MT, USA, 25 March 2000. [Google Scholar] [CrossRef]
- Mitchell, W.H.; Spagnolie, S.E. A generalized traction integral equation for Stokes flow, with applications to near-wall particle mobility and viscous erosion. J. Comput. Phys. 2016, 333, 462–482. [Google Scholar] [CrossRef]
- Tavassoli, H.; Kriebitzsch, S.H.L.; van der Hoef, M.A.; Peters, E.A.J.F.; Kuipers, J.A.M. Direct numerical simulation of particulate flow with heat transfer. Int. J. Multiph. Flow 2013, 57, 29–37. [Google Scholar] [CrossRef]
- Deen, N.G.; Kriebitzsch, S.H.; van der Hoef, M.A.; Kuipers, J.A.M. Direct numerical simulation of flow and heat transfer in dense fluid–particle systems. Chem. Eng. Sci. 2012, 81, 329–344. [Google Scholar] [CrossRef]
- Zhou, Z.; Jin, G.; Tian, B.; Jian, R. Hydrodynamic force and torque models for a particle moving near a wall at finite particle Reynolds numbers. Int. J. Multiph. Flow 2017, 92, 1–19. [Google Scholar] [CrossRef]
- Daghooghi, M.; Borazjani, I. The effects of irregular shape on the particle stress of dilute suspensions. J. Fluid Mech. 2018, 839, 663–692. [Google Scholar] [CrossRef]
- Choi, C.R.; Kim, C.N. Fluid-particle interaction simulations of the interception of red blood cells in shear flow. J. Mech. Sci. Technol. 2010, 24, 1451–1463. [Google Scholar] [CrossRef]
- Terrell, E.J.; Higgs Iii, C.F. A Modeling Approach for Predicting the Abrasive Particle Motion during Chemical Mechanical Polishing. J. Tribol. 2007, 129, 933–941. [Google Scholar] [CrossRef]
- Kharoua, N.; Alshehhi, M.; Khezzar, L. Effects of fluid flow split on black powder distribution in pipe junctions. Adv. Powder Technol. 2016, 27, 42–52. [Google Scholar] [CrossRef]
- Sung, I.-H.; Han, H.-G.; Kong, H. Nanomechanical characteristics at an ultra-small particle-surface contact interface. J. Mech. Sci. Technol. 2010, 24, 107–110. [Google Scholar] [CrossRef]
- Sajjadi, H.; Salmanzadeh, M.; Ahmadi, G.; Jafari, S. Lattice Boltzmann method and RANS approach for simulation of turbulent flows and particle transport and deposition. Particuology 2017, 30, 62–72. [Google Scholar] [CrossRef]
- Bian, L.-C.; Guo, J.-M.; Pan, J. Micromechanics analysis for thermal expansion coefficients of three-phase particle composites. Arch. Appl. Mech. 2019, 89, 1641–1654. [Google Scholar] [CrossRef]
- Chen, Y.-X.; Gong, W.-J.; Kang, R. Coupling behavior between adhesive and abrasive wear mechanism of aero-hydraulic spool valves. Chin. J. Aeronaut. 2016, 29, 1119–1131. [Google Scholar] [CrossRef]
- Chen, Y.-X.; Jing, H.-L.; Liao, X.; Kang, R. Research on the wear mechanism coupling modeling of spool valve. In Proceedings of the 2015 Annual Reliability and Maintainability Symposium (RAMS), Palm Harbor, FL, USA, 26–29 January 2015. [Google Scholar]
- Chu, Y.-B.; Yuan, Z.-H.; Chang, W.-C. Research on the Dynamic Erosion Wear Characteristics of a Nozzle Flapper Pressure Servo Valve Used in Aircraft Brake System. Math. Probl. Eng. 2020, 2020, 3136412. [Google Scholar] [CrossRef]
- Ren, P.; Chen, J.-H.; Hu, Y.-P.; Yuan, H.-J. Research on typical wear fault diagnosis of electa hydraulic servo valve element. In Proceedings of the 2016 Prognostics and System Health Management Conference (PHM-Chengdu), Chengdu, China, 19–21 October 2016. [Google Scholar] [CrossRef]
- Cao, L.-H.; Liu, S.; Hu, P.-F.; Si, H.-Y. The influence of governing valve opening on the erosion characteristics of solid particle in steam turbine. Eng. Fail. Anal. 2020, 118, 104929. [Google Scholar] [CrossRef]
- Zhang, K.; Yao, J.-Y.; Jiang, T.-M. Degradation assessment and life prediction of electro-hydraulic servo valve under erosion wear. Eng. Fail. Anal. 2014, 36, 284–300. [Google Scholar] [CrossRef]
- Yin, Y.-B.; Yuan, J.-Y.; Guo, S.-R. Numerical study of solid particle erosion in hydraulic spool valves. Wear 2017, 392, 174–189. [Google Scholar] [CrossRef]
- Fang, X.; Yao, J.-Y.; Yin, X.-Z.; Chen, X.; Zhang, C.-H. Physics-of-failure models of erosion wear in electrohydraulic servo valve, and erosion wear life prediction method. Mechatronics 2013, 23, 1202–1214. [Google Scholar] [CrossRef]
- Sun, F.; Hu, Y.-B.F.Y.; Yang, B.-B. CFD-based Characteristic Analysis of Erosion Wear of Servo Slide Valve. Surf. Technol. 2016, 45, 84–90. (In Chinese) [Google Scholar]
- Zhang, J.; Ji, H.; Zhao, W.; Chen, Q.; Liu, X. Numerical investigation of micrometer-sensitive particle intrusion in hydraulic valve clearances and its impact on valve performance. Processes 2024, 12, 864. [Google Scholar] [CrossRef]
- Iyengar, S.K.R. Effect of particulate-contaminants on break-out and actuating for forces in spool valves-A case study. BFPR Annu. Rep. 1976, 10, 1–7. [Google Scholar]
- Fitch, E.C. Control of hydraulic fluid contamination parts: Component contaminant tolerance. Hydraul. Pneum. 1983, 37, 88–98. [Google Scholar]
- Eleftherakis, J.G. Contaminant Sensitivity Assessment of Electrohydraulic Valves. SAE Int. By Univ. Auckl. 1989, 891867. [Google Scholar] [CrossRef]
- Reinertz, O.; Schlemmer, K.; Schumacher, J.T.; Murrenhoff, H. Development of an accelerated ageing test for hydraulic spool and poppet valves. In Proceedings of the 7th International Fluid Power Conference (7th IFK), Aachen, Germany, 22–24 March 2010. [Google Scholar]
- Ji, H.; Cui, T.-X.; Chen, X.-M.; Wei, M.; Zhen, Z.; Liu, X.-Q. Rotation phenomenon of square micron particles in clearance of spool valve. J. Lanzhou Univ. Technol. 2017, 43, 51–55. (In Chinese) [Google Scholar]
- Lu, L.; Xia, F.-Y.; Yin, Y.-B.; Yuan, J.-Y.; Guo, S.-R. Spool stuck mechanism of ball-type rotary direct drive pressure servo valve. J. Zhejiang Univ. (Eng. Sci.) 2019, 53, 1265–1273+1339. (In Chinese) [Google Scholar]
- Borghi, M. Hydraulic locking-in spool-type valves: Tapered clearances analysis. Proc. Inst. Mech. Eng.-Part I J. Syst. Control Eng. 2001, 215, 157–168. [Google Scholar] [CrossRef]
- Hong, S.H.; Kim, K.W. A new type groove for hydraulic spool valve. Tribol. Int. 2016, 103, 629–640. [Google Scholar] [CrossRef]
- Zhang, S.-Z.; Lin, Z.-H.; Chen, S.-J.; Jin, Z.-J.; Qian, J.-Y. Unbalanced force analysis on valve core clamping in hydraulic spool valves. Ann. Nucl. Energy 2024, 203, 110505. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, Z.; Chen, Y.; Gong, Y. Simulation Analysis and Experimental Research on Mechanical Properties of Water-Hydraulic Ball Valve. 2022, preprint. [Google Scholar] [CrossRef]
- Zhao, J.-H.; Zhang, B.; Chen, T.; Wang, Q.; Zhou, S.-L.; Gao, D.-R. Research on valve core’s clamping stagnation of double flapper-nozzle servo valve. High Technol. Lett. 2019, 25, 65–73. [Google Scholar] [CrossRef]
- Zeng, Q.-L.; Cui, J.; Zhao, W.-M. Simulation Analysis for Hydraulic Clamping Force of Bidirectional Hydraulic Lock’ Valve Spool Based on Fluent. Adv. Mater. Res. 2012, 542–543, 1091–1095. [Google Scholar] [CrossRef]
- Jia, W.-H.; Yin, C.-B.; Cao, D.-H.; Yi, Y. The gap seal’s influences on the leakage and clamping of multi-way directional valves. Sens. Transducers 2013, 23, 44–48. [Google Scholar]
- Wang, A.-L.; Dong, Y.-L.; Zhou, P.-J.; Wu, X.-F.; Zhou, C.-L. Robust Design Method for the Seizure Problem of Hydraulic Slide Valve. J. Shangh Ai Jiaotong Univ. 2011, 45, 1637–1642+1652. (In Chinese) [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Property | Al | Sand (SiO2) | Fe |
|---|---|---|---|
| Density (g/cm3) | 2.7 | 2.5~2.7 | 7.87 |
| Elastic modulus (GPa) | 68.5 | 73.1 | 206 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, Q.; Liu, M.; Ji, H.; Chai, W.; Luo, C. Characterization of Hydraulic Spool Clamping Triggered by Solid Particles Based on Mechanical Model and Experiment Research. Appl. Sci. 2024, 14, 8880. https://doi.org/10.3390/app14198880
Chen Q, Liu M, Ji H, Chai W, Luo C. Characterization of Hydraulic Spool Clamping Triggered by Solid Particles Based on Mechanical Model and Experiment Research. Applied Sciences. 2024; 14(19):8880. https://doi.org/10.3390/app14198880
Chicago/Turabian StyleChen, Qianpeng, Min Liu, Hong Ji, Wenwei Chai, and Changmin Luo. 2024. "Characterization of Hydraulic Spool Clamping Triggered by Solid Particles Based on Mechanical Model and Experiment Research" Applied Sciences 14, no. 19: 8880. https://doi.org/10.3390/app14198880
APA StyleChen, Q., Liu, M., Ji, H., Chai, W., & Luo, C. (2024). Characterization of Hydraulic Spool Clamping Triggered by Solid Particles Based on Mechanical Model and Experiment Research. Applied Sciences, 14(19), 8880. https://doi.org/10.3390/app14198880