

Innovative Experimental Assessment of Human–Structure Interaction Effects on Footbridges with Accurate Multi-Axial Dynamic Sensitivity Using Real-Time Hybrid Simulation

Abstract
:1. Introduction
2. Main Dynamic System
2.1. Footbridge with Precise Dynamic Sensitivity
2.2. Human-Induced Gait Loads: Test Subjects (TSs)
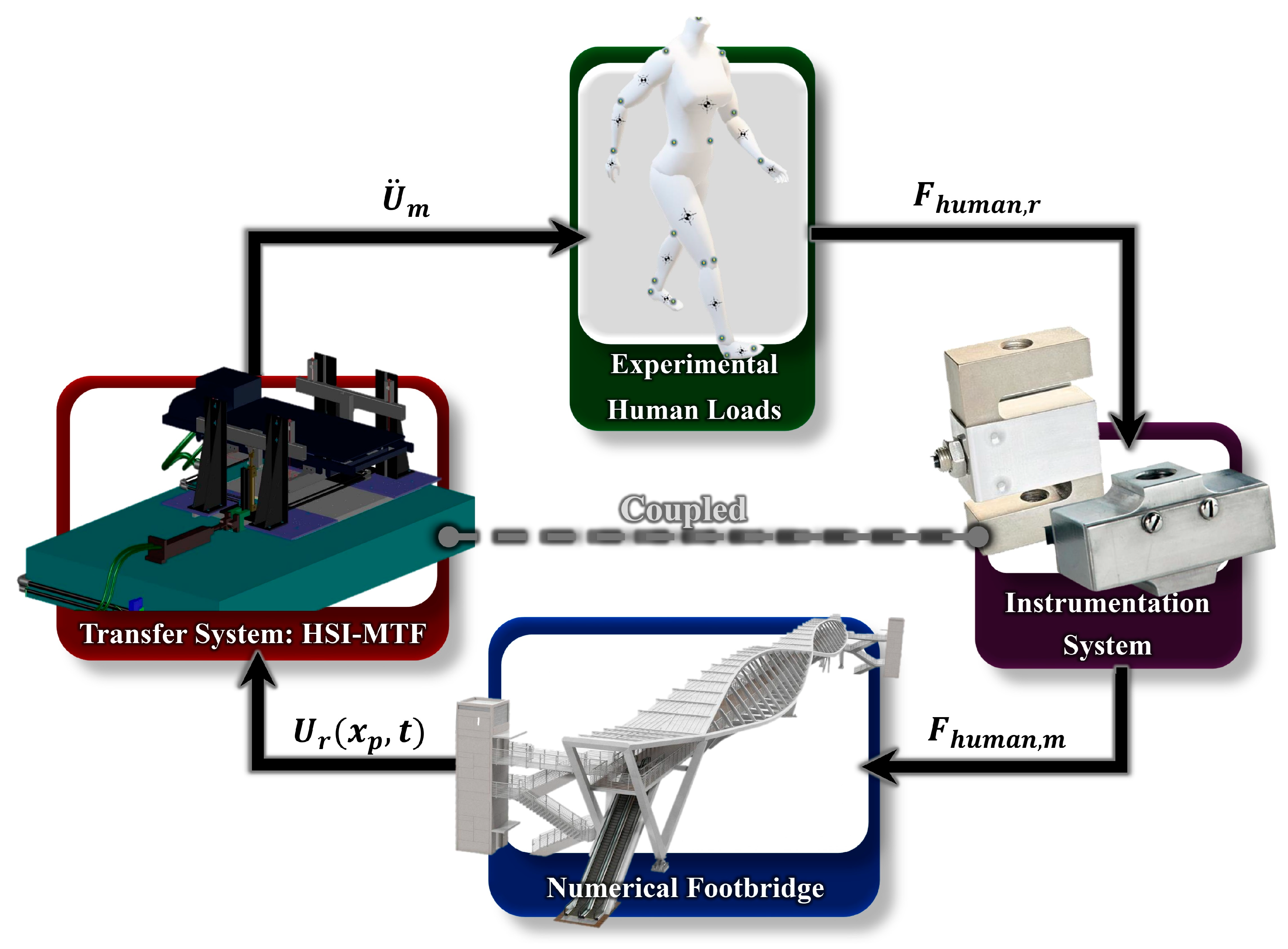
3. Real-Time Hybrid Simulation (RTHS)
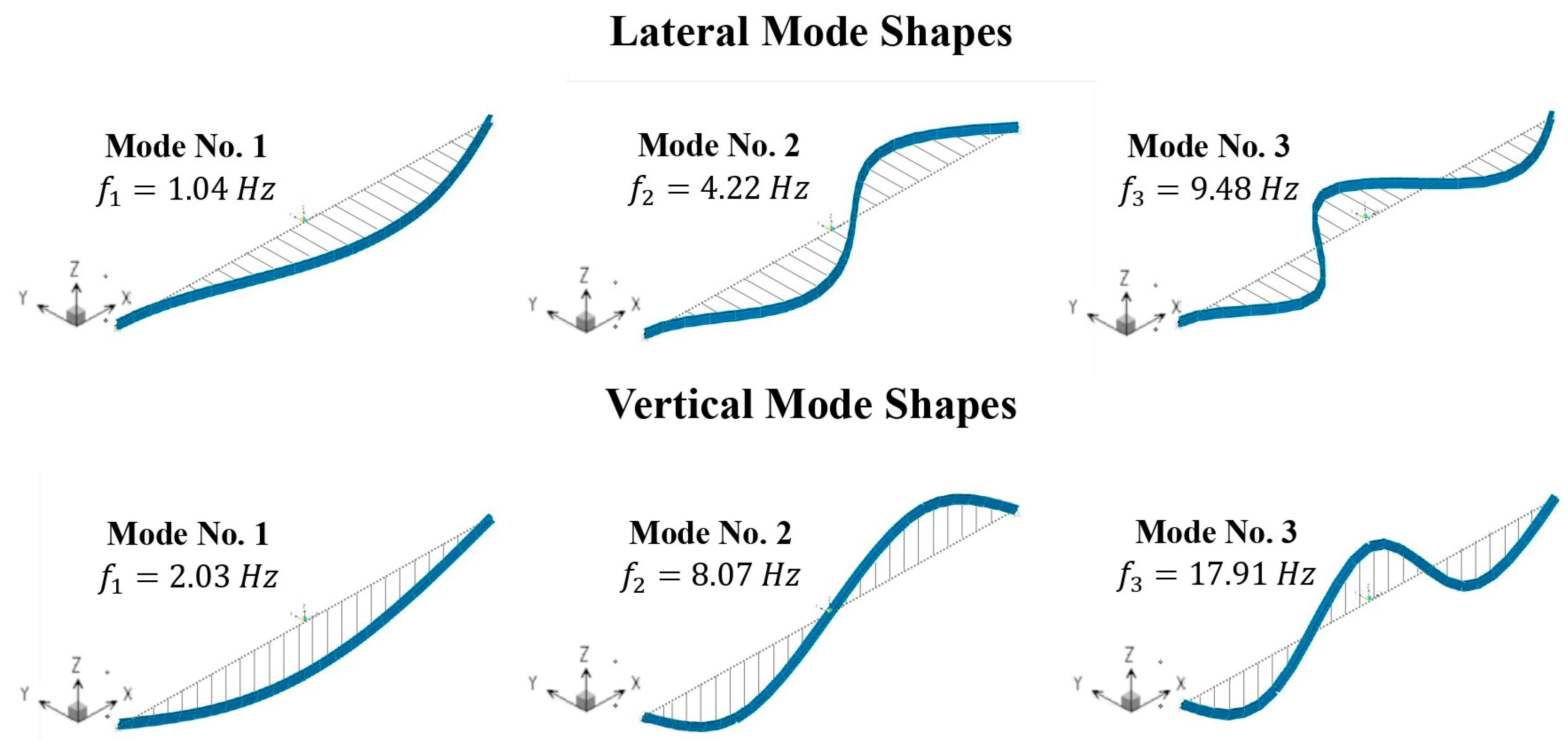
3.1. Numerical Substructure (NS): Reference Footbridge Model
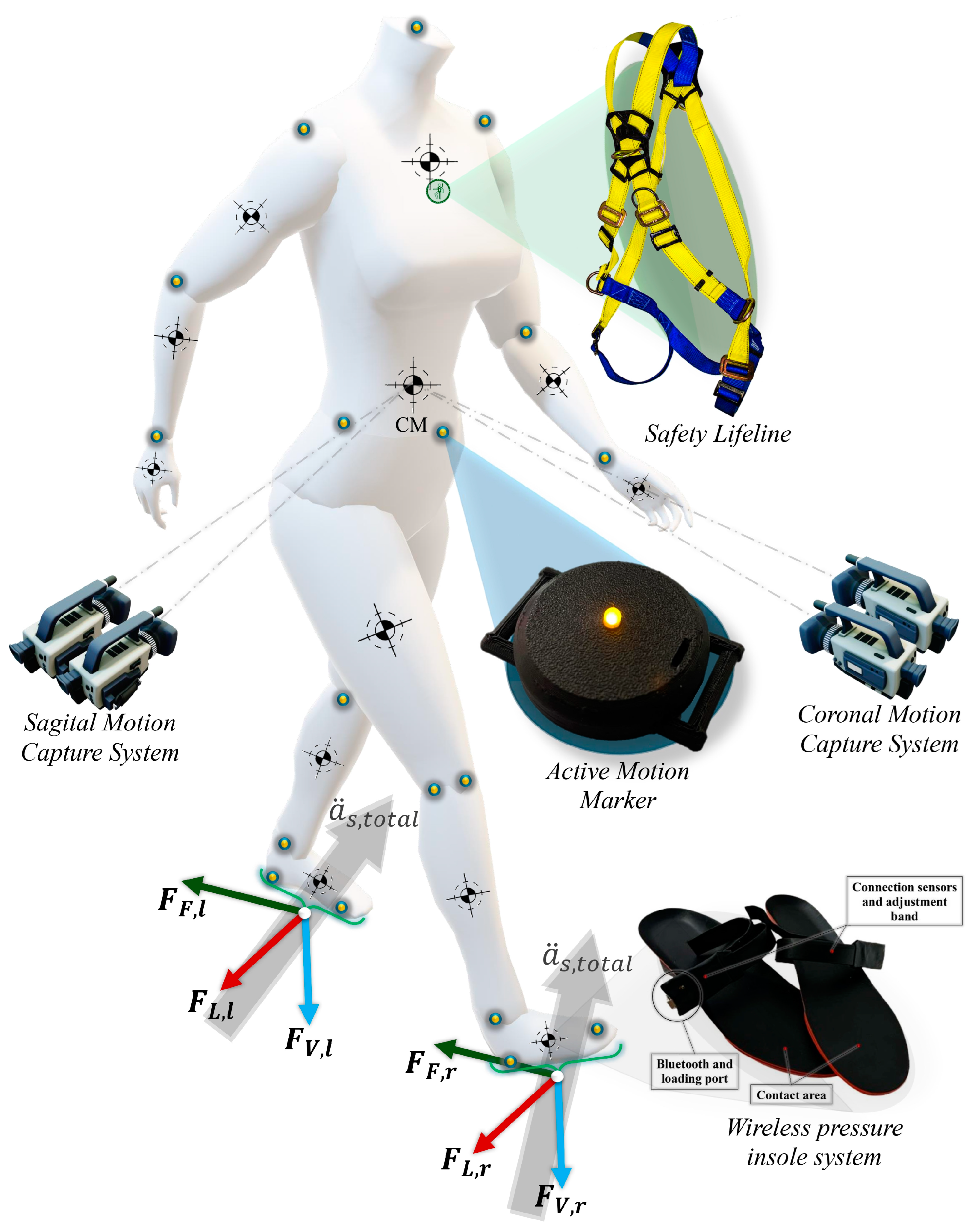
3.2. Experimental Substructure (NS)
3.3. Transfer System: Human–Structure Interaction Multi-Axial Test Framework (HSI-MTF)
3.4. Experimental Setup
3.5. Experimental Input: Evaluation of HSI Effects
4. Results and Discussion
4.1. Human-Induced Gait Load Performance on the Reference Footbridge
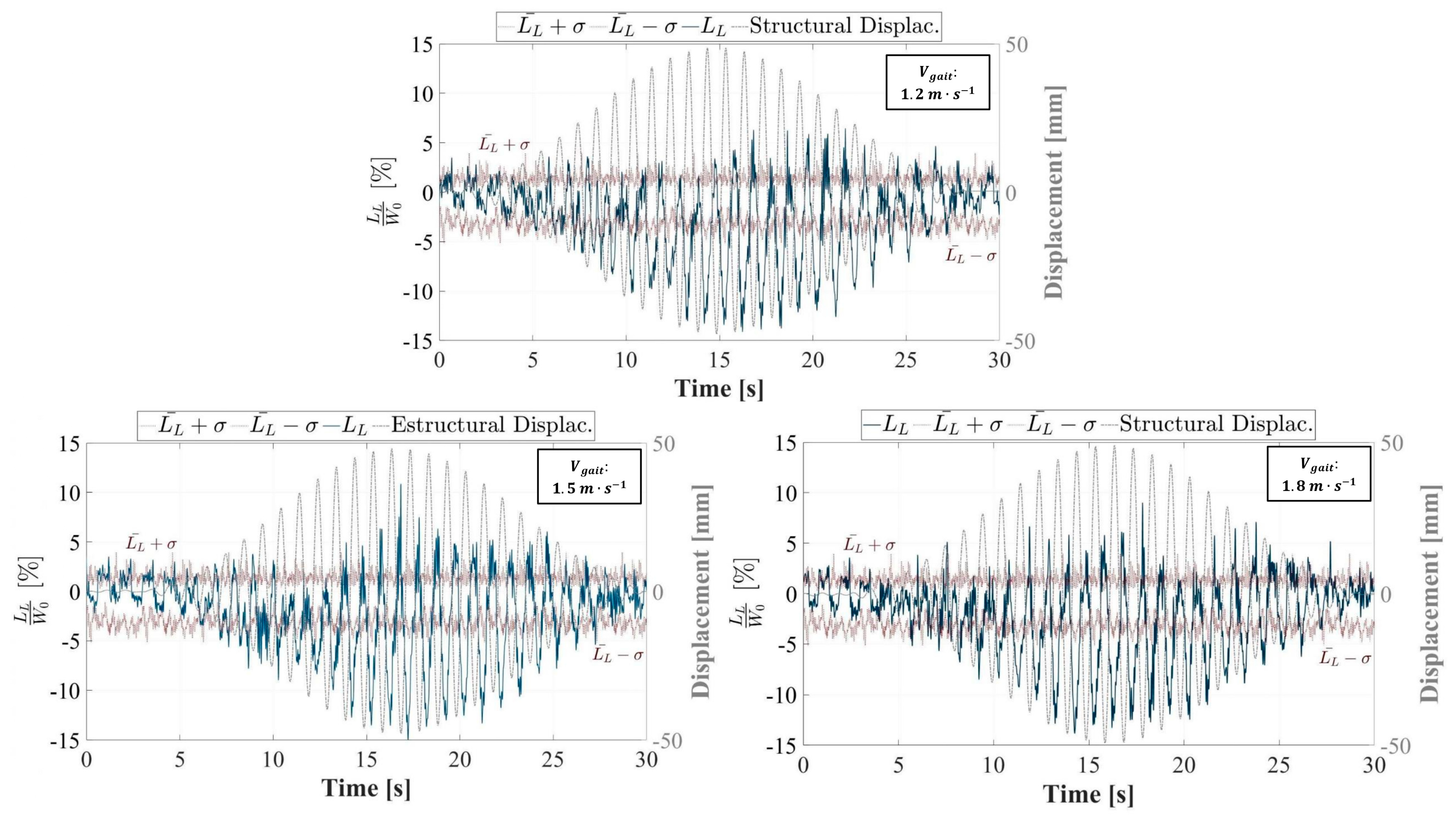
4.1.1. Lateral Loads
4.1.2. Vertical Loads
4.2. Reference Footbridge Performance, Including HSI
4.3. RTHS Performance
5. Future Works and Perspectives
6. Conclusions
- (1)
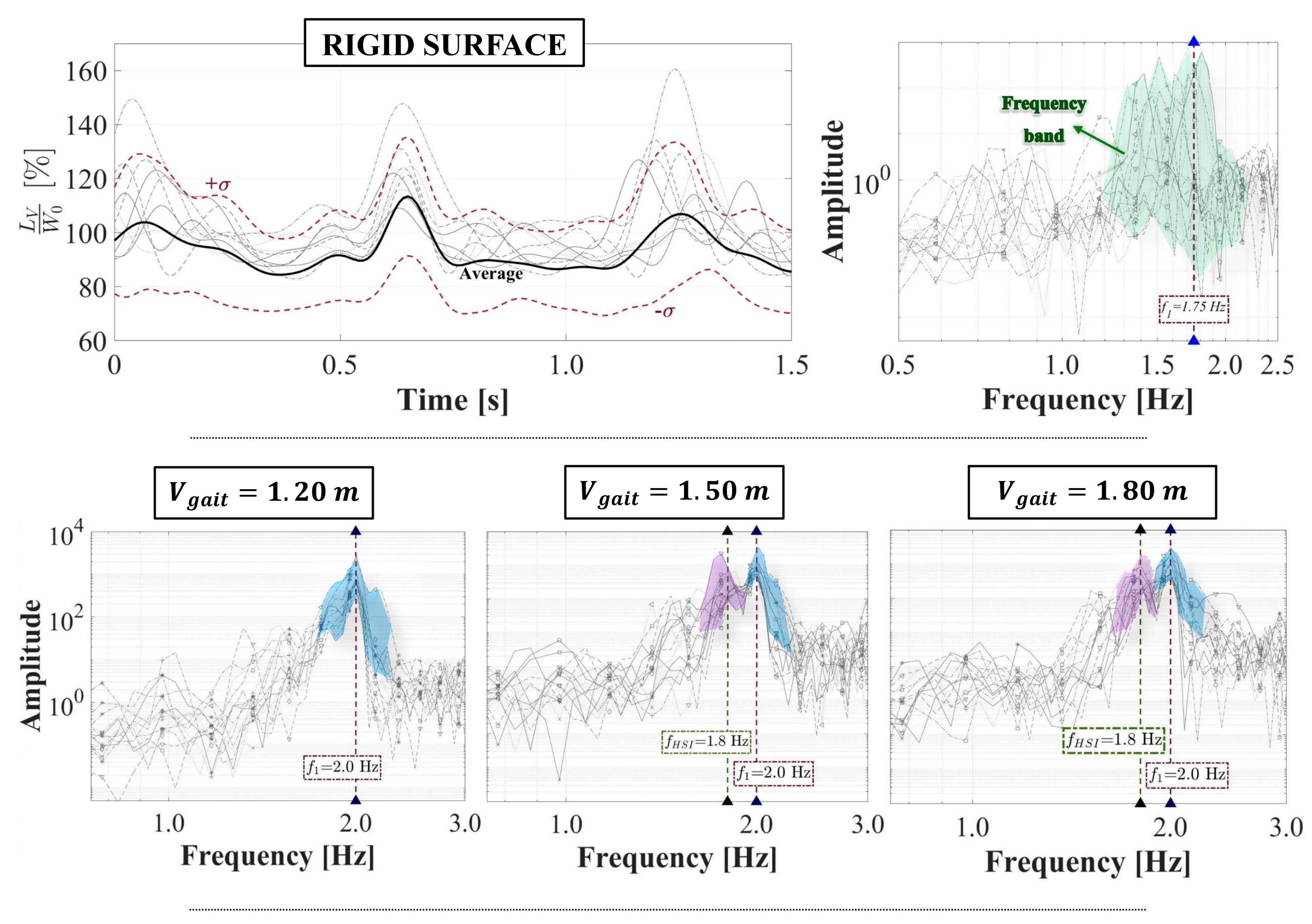
- The assessment of human-induced gait loads on the reference footbridge revealed significant interactions between pedestrian activities and structural responses. Both lateral and vertical loads exhibited dynamic coupling, with frequency content closely aligned to the footbridge’s natural frequencies, particularly in the range of 1.0 Hz and 1.8 Hz. This dynamic synchronization, particularly during higher gait velocities, amplified structural vibrations, especially in the middle span, leading to increased loading by up to 300.0% in lateral directions. Vertical loads showed similar variation, with substantial amplification and attenuation depending on the gait velocity and footbridge position. These findings highlight the critical role of human–structure interaction (HSI) in dynamically sensitive structures, underscoring the importance of accounting for these interactions in the design and evaluation processes to ensure serviceability and safety under regular pedestrian use.
- (2)
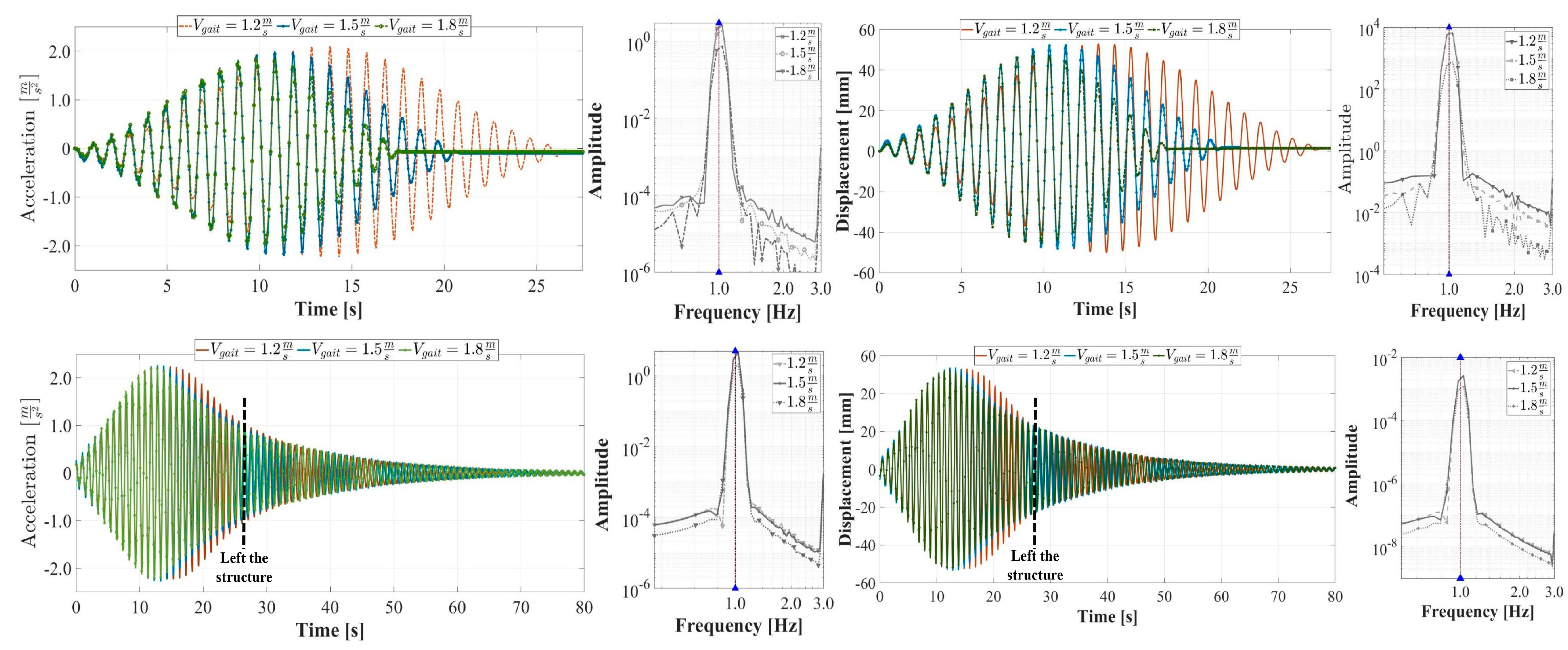
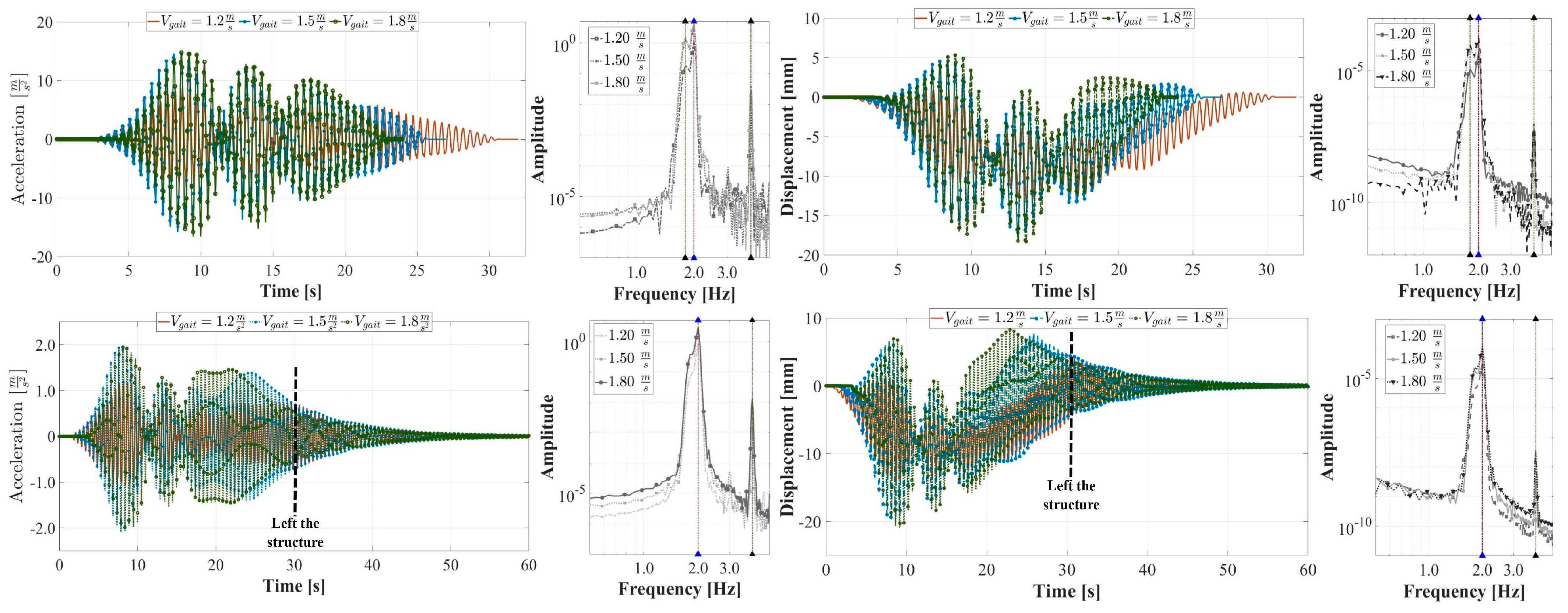
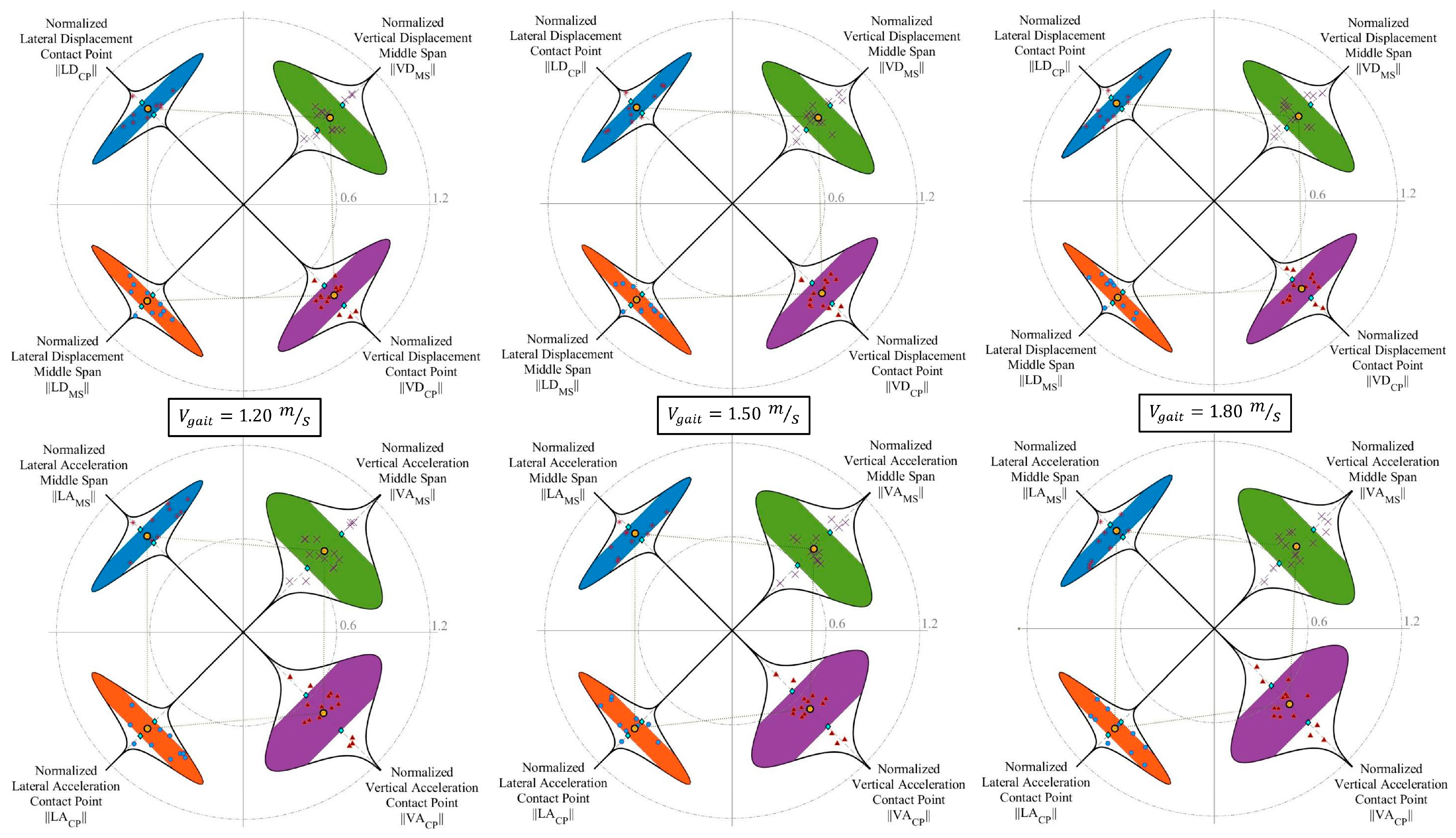
- The performance analysis of the reference footbridge under human–structure interaction (HSI) effects demonstrated significant dynamic responses in both the lateral and vertical directions, particularly at higher pedestrian velocities. Lateral accelerations and displacements exhibited a fundamental frequency around 1.0 Hz, whereas vertical responses peaked near 2.0 Hz. The coupling of pedestrian-induced loads with footbridge dynamic properties led to increased vibration amplitudes, especially in the middle span. Lateral accelerations showed a dispersion of approximately 15.0%, whereas vertical accelerations exhibited higher variability, with dispersions reaching up to 20.0%. Moreover, the percentage difference between lateral and vertical displacements was less than 10.0% for all evaluated gait velocities. These findings underscore the critical importance of integrating HSI considerations into footbridge design because human activity can induce substantial variations in structural performance, potentially affecting serviceability and user comfort.
- (3)
- The experimental assessment was performed using the RTHS technique, taking an analytical continuous model (through a fourth-order partial differential equation) of the reference structure with accurate multi-axial dynamic sensitivity as a numerical substructure and the gait of the test subjects as an experimental substructure. All cases had high-level tracking for the horizontal and vertical transfer systems, which developed a generalized amplitude A0 around 1.0 and global errors lower than 2.95%. Furthermore, HSI-MTF had delays of less than 2.10 ms in all directions evaluated with an NRMS of less than 2.95%, employing a robust H∞ type controller in the lateral axis and a PID setup with a phase anticipator in the vertical axis. The above results indicate that the RTHS exhibits high fidelity and accuracy.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Aktan, A.E.; Brownjohn, J.M.W.; Moon, F.L.; Sjoblom, K.J.; Bartoli, I.; Karaman, S.G. Civil engineer for urban livability, sustainability and resilience. Sustain. Resilient Infrastruct. 2022, 7, 480–491. [Google Scholar] [CrossRef]
- Andrade, P.; Santos, J.; Escórcio, P. Numerical methods to predict human induced vibrations on low frequency stairs. Part 2: Evaluation by comparing with experimental data. Structures 2021, 34, 1008–1020. [Google Scholar] [CrossRef]
- Andrade, P.; Santos, J.; Maia, L. Numerical methods to predict human induced vibrations on low frequency stairs. Part 1: Literature review, modelling. Structures 2021, 34, 575–588. [Google Scholar] [CrossRef]
- Berardengo, M.; Drago, L.; Manzoni, S.; Vanali, M. An approach to predict human–structure interaction in the case of staircases. Arch. Appl. Mech. 2019, 89, 2167–2191. [Google Scholar] [CrossRef]
- Yuan, J.; Yu, S.; Liu, C.; Gao, C.; Wang, W.; He, L.; Fan, F. Investigation of Dynamic Responses and Vibration Serviceability of Temporary Grandstands by a 3 DOF Interaction Model due to Swaying Motion. Shock Vib. 2022, 2022, 6217148. [Google Scholar] [CrossRef]
- Comer, A.; Blakeborough, A.; Williams, M.S. Grandstand simulator for dynamic human-structure interaction experiments. Exp. Mech. 2010, 50, 825–834. [Google Scholar] [CrossRef]
- Millán-Yusti, D.C.; Marulanda, J.; Thomson, P. Evaluation of the structural reliability of a grandstand subjected to anthropic loads. Ing. Compet. 2016, 18, 59–69. [Google Scholar] [CrossRef]
- Vasilatoua, V.; Harrisona, R.; Nikitasb, N. Development of a human-structure dynamic interaction model for human sway for use in permanent grandstand design. Procedia Eng. 2017, 199, 2895–2900. [Google Scholar] [CrossRef]
- Racic, V.; Brownjohn, J.M.W.; Pavic, A. Reproduction and application of human bouncing and jumping forces from visual marker data. J. Sound Vib. 2010, 329, 3397–3416. [Google Scholar] [CrossRef]
- Moreu, F.; Maharjan, D.; Zhu, C.; Wyckoff, E. Monitoring Human Induced Floor Vibrations for Quantifying Dance Moves: A Study of Human–Structure Interaction. Front. Built Environ. 2020, 6, 36. [Google Scholar] [CrossRef]
- Mohammed, A.; Pavic, A. Human-structure dynamic interaction between building floors and walking occupants in vertical direction. Mech. Syst. Signal Process. 2021, 147, 107036. [Google Scholar] [CrossRef]
- Bedon, C. Time-domain numerical analysis of single pedestrian random walks on laminated glass slabs in pre- or post-breakage regime. Eng. Struct. 2022, 260, 114250. [Google Scholar] [CrossRef]
- Živanović, S.; Pavic, A.; Reynolds, P. Vibration serviceability of footbridges under human-induced excitation: A literature review. J. Sound Vib. 2005, 279, 1–74. [Google Scholar] [CrossRef]
- Ingólfsson, E.T.; Georgakis, C.T.; Jönsson, J. Pedestrian-induced lateral vibrations of footbridges: A literature review. Eng. Struct. 2012, 45, 21–52. [Google Scholar] [CrossRef]
- Colmenares, D.; del Pozo, G.; Costa, G.; Karoumi, R.; Andersson, A. Full-scale tests of a lightweight footbridge, The Folke Bernadotte Bridge. In Current Perspectives and New Directions in Mechanics, Modelling and Design of Structural Systems; CRC Press: Boca Raton, FL, USA, 2022; pp. 766–771. [Google Scholar]
- Gallegos-calderón, C.; Naranjo-pérez, J.; Renedo, C.M.C.; Díaz, M. A frequency-domain approach to model vertical crowd-structure interaction in lightweight footbridges. J. Sound Vib. 2023, 557, 117750. [Google Scholar] [CrossRef]
- Castillo, B.; Marulanda, J.; Thomson, P. Experimental Evaluation of Pedestrian-Induced Multiaxial Gait Loads on Footbridges: Effects of the Structure-to-Human Interaction by Lateral Vibrating Platforms. Sensors 2024, 24, 2517. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y.; Gan, D.; Li, J.; Chen, Y.F.; Yuan, K. Serviceability Assessment of Footbridges Under Heel-Drop Impact Considering Human Structure Interaction. Int. J. Struct. Stab. Dyn. 2024, 24, 4. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; De Roeck, G.; Van den Broeck, P. Vibration serviceability of footbridges: Evaluation of the current codes of practice. Eng. Struct. 2014, 59, 448–461. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; de Roeck, G.; Van Den Broeck, P. Human-induced vibrations of footbridges: The effect of vertical human-structure interaction. In Conference Proceedings of the Society for Experimental Mechanics Series; Springer: New York, NY, USA, 2016; pp. 299–307. [Google Scholar] [CrossRef]
- Toso, M.A.; Gomes, H.M.; de Brito, J.L.V. Crowd-structure interaction: Investigating the spatiality and synchronization of a pedestrian force model. J. Constr. Steel Res. 2017, 133, 510–521. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; De Roeck, G.; Van den Broeck, P. The impact of vertical human-structure interaction on the response of footbridges to pedestrian excitation. J. Sound Vib. 2017, 402, 104–121. [Google Scholar] [CrossRef]
- Ahmadi, E.; Caprani, C.; Živanović, S.; Heidarpour, A. Assessment of human-structure interaction on a lively lightweight GFRP footbridge. Eng. Struct. 2019, 199, 109687. [Google Scholar] [CrossRef]
- van den Broeck, P.; van Hauwermeiren, J.; van Nimmen, K. An open access benchmark dataset on pedestrian-induced vibrations collected on the eeklo footbridge. In Proceedings of the International Conference on Structural Dynamic, EURODYN, Athens, Greece, 23–26 November 2020; European Association for Structural Dynamics: Athens, Greece, 2020; pp. 1866–1873. [Google Scholar] [CrossRef]
- Gallegos-Calderón, C.; Naranjo-Pérez, J.; Pulido, M.G.D.; Díaz, I.M.; Pulido, M.G.D. Design, construction and structural response of a lightweight FRP footbridge. In Proceedings of the IABSE Congress, Ghent 2021: Structural Engineering for Future Societal Needs; International Association for Bridge and Structural Engineering (IABSE), Ghent, Belgium, 22–24 September 2021; pp. 2053–2061. [Google Scholar] [CrossRef]
- Lottefier, J.; Van den Broeck, P.; Vanwanseele, B.; Van Nimmen, K. Active human-structure interaction in vertical running-induced vibrations: An experimental study. J. Sound Vib. 2024, 589, 118588. [Google Scholar] [CrossRef]
- Ingólfsson, E.T.; Georgakis, C.T.; Ricciardelli, F.; Jönsson, J. Experimental identification of pedestrian-induced lateral forces on footbridges. J. Sound Vib. 2011, 330, 1265–1284. [Google Scholar] [CrossRef]
- Castillo, B.; Thomson, P.; Marulanda, J. A Multiaxial Test Framework for the Evaluation of Human Gait-Induced Loads on Lateral Harmonic Surfaces. J. Phys. Conf. Ser. 2024, 2647, 122004. [Google Scholar] [CrossRef]
- Wei, X.; Liu, J.C.; Bi, S. Uncertainty quantification and propagation of crowd behaviour effects on pedestrian-induced vibrations of footbridges. Mech. Syst. Signal Process. 2022, 167, 108557. [Google Scholar] [CrossRef]
- García-Diéguez, M.; Racic, V.; Zapico-Valle, J.L. Complete statistical approach to modelling variable pedestrian forces induced on rigid surfaces. Mech. Syst. Signal Process. 2021, 159, 107800. [Google Scholar] [CrossRef]
- Cristiani, E.; Piccoli, B.; Tosin, A.; Cristiani, E.; Piccoli, B.; Tosin, A. An overview of the modeling of crowd dynamics. In Multiscale Modeling of Pedestrian Dynamics; Springer: Cham, Switzerland, 2014; pp. 73–107. [Google Scholar]
- Nakamura, S.; Kawasaki, T.; Katsuura, H.; Yokoyama, K. Experimental studies on lateral forces induced by pedestrians. J. Constr. Steel Res. 2008, 64, 247–252. [Google Scholar] [CrossRef]
- Carroll, S.P.; Owen, J.S.; Hussein, M.F.M. Reproduction of lateral ground reaction forces from visual marker data and analysis of balance response while walking on a laterally oscillating deck. Eng. Struct. 2013, 49, 1034–1047. [Google Scholar] [CrossRef]
- Bocian, M.; Burn, J.F.; Macdonald, J.H.G.; Brownjohn, J.M.W. From phase drift to synchronisation–pedestrian stepping behaviour on laterally oscillating structures and consequences for dynamic stability. J. Sound Vib. 2017, 392, 382–399. [Google Scholar] [CrossRef]
- Ahmadi, E.; Caprani, C.; Živanović, S.; Evans, N.; Heidarpour, A. A framework for quantification of human-structure interaction in vertical direction. J. Sound Vib. 2018, 432, 351–372. [Google Scholar] [CrossRef]
- Han, H.; Zhou, D.; Ji, T.; Zhang, J. Modelling of lateral forces generated by pedestrians walking across footbridges. Appl. Math. Model. 2021, 89, 1775–1791. [Google Scholar] [CrossRef]
- Abraham, N.M.; Williams, G.; Zivanovic, S. Impact of vertical vibrations on human rhythmic jumping. Structures 2023, 57, 105154. [Google Scholar] [CrossRef]
- Shahabpoor, E.; Pavic, A.; Racic, V. Identification of walking human model using agent-based modelling. Mech. Syst. Signal Process. 2018, 103, 352–367. [Google Scholar] [CrossRef]
- Belykh, I.; Bocian, M.; Champneys, A.R.; Daley, K.; Jeter, R.; Macdonald, J.H.G.; McRobie, A. Emergence of the London Millennium Bridge instability without synchronisation. Nat. Commun. 2021, 12, 7223. [Google Scholar] [CrossRef]
- Tadeu, A.; Romero, A.; Bandeira, F.; Pedro, F.; Dias, S.; Serra, M.; Brett, M.; Galvín, P. Theoretical and experimental analysis of the quasi-static and dynamic behaviour of the world’s longest suspension footbridge in 2020. Eng. Struct. 2022, 253, 113830. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Van Hauwermeiren, J.; Van den Broeck, P. Eeklo Footbridge: Benchmark Dataset on Pedestrian-Induced Vibrations. J. Bridge Eng. 2021, 26, 05021007. [Google Scholar] [CrossRef]
- Živanović, S. Benchmark Footbridge for Vibration Serviceability Assessment under the Vertical Component of Pedestrian Load. J. Struct. Eng. 2012, 138, 1193–1202. [Google Scholar] [CrossRef]
- Shahabpoor, E.; Pavic, A.; Racic, V. Interaction between Walking Humans and Structures in Vertical Direction: A Literature Review. Shock Vib. 2016, 2016, 3430285. [Google Scholar] [CrossRef]
- Aux, J.D.; Castillo, B.; Marulanda, J.; Thomson, P. Modelling Human-Structure Interaction in Pedestrian Bridges Using a Three-Dimensional Biomechanical Approach. Appl. Sci. 2024, 14, 7257. [Google Scholar] [CrossRef]
- Gao, Y.A.; Yang, Q.S.; Qin, J.W. Bipedal Crowd-Structure Interaction Including Social Force Effects. Int. J. Struct. Stab. Dyn. 2017, 17, 7. [Google Scholar] [CrossRef]
- Jiménez-Alonso, J.F.; Sáez, A.; Caetano, E.; Cunha, A. A crowd-structure interaction model to analyze the lateral lock-in phenomenon on footbridges. Int. J. Comput. Methods Exp. Meas. 2018, 6, 764–771. [Google Scholar] [CrossRef]
- Tubino, F. Probabilistic assessment of the dynamic interaction between multiple pedestrians and vertical vibrations of footbridges. J. Sound Vib. 2018, 417, 80–96. [Google Scholar] [CrossRef]
- Van, K.; Leuven, N.K.; Kasapova, K.; Dinev, D.; Van Nimmen, K.; Van Den Broeck, P. Modeling of Crowd Flows For Footbridge Design. J. Theor. Appl. Mech. 2021, 51, 35–48. [Google Scholar]
- Gallegos-Calderón, C.; Naranjo-Pérez, J.; Jiménez-Alonso, J.F.; Díaz, I.M. Lightweight footbridges subjected to streams of pedestrians: Tests and discussion of a crowd-structure interaction model. J. Phys. Conf. Ser. 2024, 2647, 122012. [Google Scholar] [CrossRef]
- Yang, H.; Wu, B.; Li, J.; Bao, Y.; Xu, G. A spring-loaded inverted pendulum model for analysis of human-structure interaction on vibrating surfaces. J. Sound Vib. 2022, 522, 116727. [Google Scholar] [CrossRef]
- Bocian, M.; Brownjohn, J.M.W.; Racic, V.; Hester, D.; Quattrone, A.; Monnickendam, R. A framework for experimental determination of localised vertical pedestrian forces on full-scale structures using wireless attitude and heading reference systems. J. Sound Vib. 2016, 376, 217–243. [Google Scholar] [CrossRef]
- Caprani, C.; Qu, J.; Zivanovic, S.; Evans, N.; Ahmadi, E. Quantification of human-structure interaction. MATEC Web Conf. 2015, 24, 07001. [Google Scholar] [CrossRef]
- Fujino, Y.; Pacheco, B.M.; Nakamura, S.-I.; Warnitchai, P. Synchronization of human walking observed during lateral vibration of a congested pedestrian bridge. Earthq. Eng. Struct. Dyn. 1993, 22, 741–758. [Google Scholar] [CrossRef]
- Dallard, P.; Fitzpatrick, A.J.; Flint, A.; Le Bourva, S.; Low, A.; Ridsdill Smith, R.M.; Willford, M. The London Millennium Footbridge. Struct. Eng. 2001, 79, 17–33. [Google Scholar]
- Dziuba, P.; Grillaud, G.; Flamand, O.; Sanquier, S.; Tétard, Y. La passerelle Solférino comportement dynamique (dynamic behaviour of the Solférino bridge). Bull. Ouvrages Mét. 2001, 1, 34–57. [Google Scholar]
- Brownjohn, J.; Fok, P.; Roche, M.; Omenzetter, P. Long span steel pedestrian bridge at Singapore Changi Airport. Part 2: Crowd loading tests and vibration mitigation measures. Struct. Eng. 2004, 82, 28–34. [Google Scholar]
- Sun, L.; Yuan, X. Study on pedestrian-induced vibration of footbridge. In Proceedings of the Footbridge 2008, Third International Conference, Porto, Portugal, 6–8 July 2008. [Google Scholar]
- Bursi, O.; Zasso, A.; Bonelli, A.; Vulcan, L.; Bonora, M.; Santini, S. Dynamic Analysis and Vibration Control of the Twin Deck Curved Suspension Foot/Cycle Bridge” Ponte Del Mare”. In Proceedings of the Third International Conference Footbridge, EURODYN 2011, Leuven, Belgium, 6–8 July 2011; pp. 1–7. [Google Scholar]
- Živanović, S.; Díaz, I.M.; Pavić, A. Influence of Walking and Standing Crowds on Structural Dynamic Properties. In Proceedings of the IMAC-XXVI, Orlando, FL, USA, 9–12 February 2009. [Google Scholar]
- Weber, F.; Obholzer, F.; Huber, P. Model-based TMD Design for the Footbridge “Inwilerstrasse” in Switzerland and its Experimental Verification. In Proceedings of the Footbridge International Conference, Madrid, Spain, 7–9 September 2020; pp. 7–9. [Google Scholar]
- Venuti, F.; Bruno, L. Crowd-structure interaction in lively footbridges under synchronous lateral excitation: A literature review. Phys. Life Rev. 2009, 6, 176–206. [Google Scholar] [CrossRef] [PubMed]
- Pena, A.N.P.; de Brito, J.L.V.; da Silva, F.F.G.; Pimentel, R.L. Pedestrian Biodynamic Model for Vibration Serviceability of Footbridges in Lateral Direction. J. Vib. Eng. Technol. 2021, 9, 1223–1237. [Google Scholar] [CrossRef]
- Gao, X.; Castaneda, N.; Dyke, S.J. Real time hybrid simulation: From dynamic system, motion control to experimental error. Earthq. Eng. Struct. Dyn. 2013, 42, 815–832. [Google Scholar] [CrossRef]
- Li, H.; Maghareh, A.; Wilfredo Condori Uribe, J.; Montoya, H.; Dyke, S.J.; Xu, Z. An adaptive sliding mode control system and its application to real-time hybrid simulation. Struct. Control Health Monit. 2022, 29, e2851. [Google Scholar] [CrossRef]
- Palacio-Betancur, A.; Gutierrez Soto, M. Recent advances in computational methodologies for real-time hybrid simulation of engineering structures. Arch. Comput. Methods Eng. 2023, 30, 1637–1662. [Google Scholar] [CrossRef]
- Gong, W.; Liu, C.; Zhao, X.; Xu, S. A model review for controller-hardware-in-the-loop simulation in EV powertrain application. IEEE Trans. Transp. Electrif. 2023, 10, 925–937. [Google Scholar] [CrossRef]
- Živanovi, S.; Lin, B.; Dang, H.V.; Zhang, S.; Mladen, Ć.; Caprani, C. Evaluation of Inverted-Pendulum-with-Rigid-Legs Walking Locomotion Models for Civil Engineering Applications Evaluation of Inverted—Pendulum–with–Rigid–Legs Walking Locomotion Models for Civil Engineering Applications. Buildings 2022, 12, 1216. [Google Scholar] [CrossRef]
- Massone, L.M.; Jara, S.; Rojas, F. Experimental study on displacement capacity of reinforced concrete walls with varying cross-sectional slenderness. J. Build. Eng. 2023, 76, 107338. [Google Scholar] [CrossRef]
- Castillo, B.; Vides, S.M.; Marulanda, J.; Ortíz, A.R.; Thomson, P. Seismic performance assessment of a low-rise thin reinforced concrete wall building with unconnected fiber reinforced elastomeric isolators using real-time hybrid simulations. J. Build. Eng. 2024, 89, 109303. [Google Scholar] [CrossRef]
- Castillo, B.; Ceron, D.F.; Vides, S.M.; Marulanda, J.; Thomson, P. Comprehensive Assessment of the Seismic Performance of an Innovative Hybrid Semiactive and Passive State Control System for a Low-Degree-of-Freedom Structure Using Real-Time Hybrid Simulation. Struct. Control. Health Monit. 2024, 2024, 9945556. [Google Scholar] [CrossRef]
- Chen, C.; Yang, Y.; Hou, H.; Peng, C.; Xu, W. Real-time hybrid simulation with multi-fidelity Co-Kriging for global response prediction under structural uncertainties. Earthq. Eng. Struct. Dyn. 2022, 51, 2591–2609. [Google Scholar] [CrossRef]
- Chen, P.-C.; Dong, M.-W.; Chen, P.-C.; Nakata, N. Stability analysis and verification of real-time hybrid simulation using a shake table for building mass damper systems. Front. Built Environ. 2020, 6, 109. [Google Scholar] [CrossRef]
- Maghareh, A.; Dyke, S.J.; Silva, C.E. A Self-tuning Robust Control System for nonlinear real-time hybrid simulation. Earthq. Eng. Struct. Dyn. 2020, 49, 695–715. [Google Scholar] [CrossRef]
- Sarebanha, A.; Schellenberg, A.H.; Schoettler, M.J.; Mosqueda, G.; Mahin, S.A. Real-time hybrid simulation of seismically isolated structures with full-scale bearings and large computational models. Comput. Model. Eng. Sci. 2019, 120, 693–717. [Google Scholar] [CrossRef]
- Brailsford, S.C.; Eldabi, T.; Kunc, M.; Mustafee, N.; Osorio, A.F. Hybrid simulation modelling in operational research: A state-of-the-art review. Eur. J. Oper. Res. 2019, 278, 721–737. [Google Scholar] [CrossRef]
- Ligeikis, C.; Christenson, R. Assessing structural reliability using real-time hybrid sub-structuring. Int. J. Lifecycle Perform. Eng. 2020, 4, 158–183. [Google Scholar] [CrossRef]
- Williams, M.S.; Blakeborough, A.; Houlsby, G.T.; Williams, D.M. Development of a real-time hybrid dynamic testing system. In Seismic Design and Practice into the Next Century; Routledge: Abingdon, UK, 2022; pp. 373–379. [Google Scholar]
- Insam, C.; Rixen, D.J. Fidelity assessment of real-time hybrid substructure testing: A review and the application of artificial neural networks. Exp. Tech. 2022, 46, 137–152. [Google Scholar] [CrossRef]
- Tian, Y.; Shao, X.; Zhou, H.; Wang, T. Advances in real-time hybrid testing technology for shaking table substructure testing. Front. Built Environ. 2020, 6, 123. [Google Scholar] [CrossRef]
- Wagg, D.; Neild, S.; Gawthrop, P. Real-time testing with dynamic substructuring. In Modern Testing Techniques for Structural Systems; Springer: Vienna, Austria, 2008. [Google Scholar]
- Blakeborough, A.; Williams, M.S.; Darby, A.P.; Williams, D.M. The development of real–time substructure testing. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2001, 359, 1869–1891. [Google Scholar] [CrossRef]
- Mahin, S.A.; Shing, P.-S.B.; Thewalt, C.R.; Hanson, R.D. Pseudodynamic test method—Current status and future directions. J. Struct. Eng. 1989, 115, 2113–2128. [Google Scholar] [CrossRef]
- Najafi, A.; Spencer, B.F. Validation Of Model-based Real-time Hybrid Simulation For A Lightly-damped And Highly-nonlinear Structural System. J. Appl. Comput. Mech. 2021, 7, 1252–1265. [Google Scholar] [CrossRef]
- Castillo, B.; Riascos, C.; Franco, J.M.; Marulanda, J.; Thomson, P. Assessing Spatiotemporal Behavior of Human Gait: A Comparative Study between Low-Cost Smartphone-Based Mocap and OptiTrack Systems. Exp. Tech. 2024. [Google Scholar] [CrossRef]
- Ardakani, E.S. Dynamic Interaction of Walking Humans with Pedestrian Structures in Vertical Direction Experimentally Based Probabilistic Modelling. Ph.D. Thesis, University of Sheffield, Sheffield, UK, 2014. [Google Scholar]
- Condori Uribe, J.W.; Salmeron, M.; Patino, E.; Montoya, H.; Dyke, S.J.; Silva, C.E.; Maghareh, A.; Najarian, M.; Montoya, A. Experimental benchmark control problem for multi-axial real-time hybrid simulation. Front. Built Environ. 2023, 9, 1270996. [Google Scholar] [CrossRef]
- Tell, S.; Andersson, A.; Najafi, A.; Spencer, B.F., Jr.; Karoumi, R. Real-time hybrid testing for efficiency assessment of magnetorheological dampers to mitigate train-induced vibrations in bridges. Int. J. Rail Transp. 2022, 10, 436–455. [Google Scholar] [CrossRef]
- Christenson, R.; Dyke, S.J.; Zhang, J.; Mosqueda, G.; Chen, C.; Nakata, N.; Laplace, P.; Song, W.; Chae, Y.; Marshall, G. Hybrid Simulation: A Discussion of Current Assessment Measures; US National Science Foundation (NSF): Alexandria, VA, USA, 2014.
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons: Hoboken, NJ, USA, 2012; ISBN 1118443217. [Google Scholar]
- Deng, Z.; Huang, M.; Wan, N.; Zhang, J. The current development of structural health monitoring for bridges: A review. Buildings 2023, 13, 1360. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, M.; Wan, N.; Deng, Z.; He, Z.; Luo, J. Missing measurement data recovery methods in structural health monitoring: The state, challenges and case study. Measurement 2024, 231, 114528. [Google Scholar] [CrossRef]
- Koh, B.H.; Dyke, S.J. Structural health monitoring for flexible bridge structures using correlation and sensitivity of modal data. Comput. Struct. 2007, 85, 117–130. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Analysis Direction | Structural Damping [%] | Numerical Frequency | FE Model | ||
|---|---|---|---|---|---|
| Lateral | Axis (y-y) | 1.00 | |||
| Vertical | Axis (x-x) | 1.00 | |||
| CM [cm] | |||||
|---|---|---|---|---|---|
| 1 | 22.0 | 169.0 | 100.0 | 68.3 | M |
| 2 | 25.0 | 170.0 | 95.0 | 85.6 | M |
| 3 | 27.0 | 153.0 | 97.0 | 66.5 | f |
| 4 | 33.0 | 170.0 | 110.0 | 65.2 | M |
| 5 | 22.0 | 165.0 | 97.0 | 68.6 | M |
| 6 | 23.0 | 175.0 | 99.0 | 81.5 | M |
| 7 | 22.0 | 175.0 | 103.0 | 90.9 | M |
| 8 | 24.0 | 183.0 | 110.0 | 78.3 | M |
| 9 | 24.0 | 173.0 | 101.0 | 75.3 | M |
| 10 | 34.0 | 162.0 | 92.0 | 54.7 | f |
| 11 | 19.0 | 165.0 | 95.0 | 51.1 | f |
| 12 | 20.0 | 167.0 | 100.0 | 62.2 | f |
| 13 | 21.0 | 157.0 | 98.0 | 65.7 | f |
| 14 | 22.0 | 168.0 | 102.0 | 61.6 | M |
| 15 | 21.0 | 158.0 | 90.0 | 62.4 | f |
| Test | [%] | [Hz] | [%] | [%] | [ms] | ||
|---|---|---|---|---|---|---|---|
| Vertical Transfer System | |||||||
| 2.910 0.80 | 0.985–0.012i 0.01 | 2.065 0.03 | 0.985 0.01 | 0.540 0.30 | 2.930 0.30 | 2.010 0.10 | |
| 2.900 0.11 | 0.987–0.013i 0.01 | 2.063 0.04 | 0.987 0.01 | 0.560 0.20 | 2.940 0.30 | 2.045 0.10 | |
| 2.850 0.16 | 0.989–0.012i 0.01 | 2.065 0.03 | 0.989 0.01 | 0.560 0.30 | 2.880 0.30 | 2.085 0.10 | |
| Lateral Transfer System | |||||||
| 1.450 0.43 | 1.005–0.019i 0.01 | 1.034 0.01 | 1.005 0.01 | 0.310 0.28 | 1.860 0.40 | 1.700 0.30 | |
| 1.380 0.36 | 1.004–0.011i 0.01 | 1.045 0.01 | 1.004 0.01 | 0.310 0.29 | 1.770 0.37 | 1.600 0.20 | |
| 1.350 0.19 | 1.002–0.011i 0.01 | 1.059 0.02 | 1.002 0.01 | 0.240 0.15 | 1.670 0.18 | 1.600 0.20 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Castillo, B.; Marulanda, J.; Thomson, P. Innovative Experimental Assessment of Human–Structure Interaction Effects on Footbridges with Accurate Multi-Axial Dynamic Sensitivity Using Real-Time Hybrid Simulation. Appl. Sci. 2024, 14, 8908. https://doi.org/10.3390/app14198908
Castillo B, Marulanda J, Thomson P. Innovative Experimental Assessment of Human–Structure Interaction Effects on Footbridges with Accurate Multi-Axial Dynamic Sensitivity Using Real-Time Hybrid Simulation. Applied Sciences. 2024; 14(19):8908. https://doi.org/10.3390/app14198908
Chicago/Turabian StyleCastillo, Bryan, Johannio Marulanda, and Peter Thomson. 2024. "Innovative Experimental Assessment of Human–Structure Interaction Effects on Footbridges with Accurate Multi-Axial Dynamic Sensitivity Using Real-Time Hybrid Simulation" Applied Sciences 14, no. 19: 8908. https://doi.org/10.3390/app14198908