Abstract
One of the most pressing issues in livestock farming is the protection of economically valuable livestock. The prevention and the treatment of infectious diseases are directly related to maintaining stable livestock output. Vermin is a primary source of livestock infection, resulting in the occurrence and expansion of epidemic diseases. To protect livestock against infections caused by epidemic diseases, this study proposes a vermin repulsion system called the Miyazaki Vermin Repulsion Robot (MiVeReR). Different from existing vermin repulsion systems, the development objective of MiVeReR is to repel vermin rather than kill them. In particular, MiVeReR generates changeable acousto-optic signals as repulsion signals for wild animals. Furthermore, MiVeReR employs image data to monitor the invasion of wild animals and their location data to track them, and accurately focuses the generated signals on them. These acousto-optic stimuli can be changed based on the reactions of the intruder through the feedback of the image data to ensure the effectiveness of the repulsion motions for vermin. Details on the hardware configuration of MiVeReR and its control scheme are explained. As a first step to develop MiVeReR, we attempted to repel vermin such as mice and wild cats from farm environments. Extensive experiments were conducted to verify the effectiveness of MiVeReR and the proposed control solution. Through experiments in wild environments, the feasibility of MiVeReR was inspected. The results of this study are concretely described.
1. Introduction
Livestock farming is an important part of agriculture in Japan [1]. Practically, livestock farming accounts for more than 50% of all agricultural production. To produce high-quality meat such as pork and beef [2], it is necessary to not only raise livestock scientifically [3,4] but also protect them from disease [5,6]. The prevention and treatment of infectious diseases in livestock farming are directly related to maintaining stable livestock output. When infectious diseases spread on farms, large-scale culling is typically adopted to mitigate the spread, which results in significant economic losses [7]. Precautionary measures include shoe disinfection, feed sterilization, and protective clothing. However, wild animals that invade farms are typically carriers of deadly infectious diseases [8,9]. Wild animals infect livestock or spread viruses to other healthy animals [5].
In general, wild animals that invade farming areas include mice, wild cats, boars, birds, and so on [9]. They are typically active at night, invading farms for food or attacking livestock [10]. To repel these vermin, or to prevent their invasion, various methods have been devised and used [11,12,13], for example, using sound and/or light signals, the isolation of power grids, and predator-shaped mock-ups [14]. According to protection objectives, such methods are classified into three aspects: segregation, killing, and expulsion. The first approach, segregation, is primarily used to prevent vermin invasion after installing fences with power grids and/or artificial lights [15,16,17]. With the advances of IoT technologies, automatic monitoring methods using camera systems installed on the fences have been reported [18,19,20]. Based on artificial intelligence, the methods generate expulsion sounds according to the types of vermin that have been detected [21,22,23]. However, installation and maintenance costs are high, and it is difficult to change the location and size after placement. Regarding the second approach, vermin can be killed in many ways, such as by using weapons, traps, and drugged baits [24,25,26,27]. This approach is highly effective in controlling the number of vermin in a certain area. However, it requires the disposal of dead vermin bodies. Poisonous baits can lead to death or injury. This method may endanger the consumers of livestock that have ingested baits. The method is not suitable for wild animal preservation.
As the third approach, the signals used in existing vermin expulsion methods primarily include sound [28,29,30], flash (light), appearance that imitates fierce predators [14], such as wolves and eagles, and smell [31] stimuli. Among these signals, sound and/or flash stimuli, known as acousto-optic signals, are widely used. Examples of vermin expulsion sounds include the cry of a beast [29], gun explosions [30], and air-raid sirens. Examples of optical signals include visible light and laser beams [32,33]. This approach causes less harm to wild animals, livestock, and the natural environment than the killing approach. The installation of sound or light sources is convenient for changing the irradiation location based on the situation. However, when wild animals repeatedly experience the same acousto-optic signals, they can adapt to these signals. Accordingly, the repeated use of the same stimuli gradually reduces the effectiveness of this approach. In addition, for fixed artifact predators, vermin may learn to avoid areas facing the predators. Ultimately, these methods are ineffective in the long term; thus, vermin must be repelled by human force [34]. Unfortunately, to the best of our knowledge, no approaches have been reported as considering these limitations.
To deal with the limitations, this study proposes a vermin repulsion robotic system. To achieve this goal, a robotic system called the Miyazaki Vermin Repulsion Robot (MiVeReR) was developed. MiVeReR is based on the generation of changeable acousto-optic signals. Furthermore, MiVeReR employs image data to monitor vermin invasion and their location data to track them, and accurately focuses the generated stimuli on the target animal. More importantly, the generated signals are adjusted through the feedback of the image data to ensure effective changeable signal generation. This paper describes in detail the MiVeReR prototype and its expulsion–control scheme. Extensive experiments were performed within indoor environments to verify the effectiveness of MiVeReR and its control scheme. Moreover, the feasibility of MiVeReR was examined by field experiments.
The remainder of this paper is organized as follows. In Section 2, the development direction of MiVeReR is introduced. Moreover, the MiVeReR prototype is described in detail. Section 3 explains the expulsion–control scheme of MiVeReR. Section 4 presents the evaluation results for extensive experiments conducted to verify the effectiveness of MiVeReR and their discussions. Section 5 concludes this study.
2. Development of MiVeReR Prototype
In this paper, we address the vermin expulsion problem to repel wild intruders. As a solution, this study proposes MiVeReR and its control scheme by combining changeable sounds and light signals and tracking the locations of the intruders.
2.1. Development Direction and Design Concept of MiVeReR
MiVeReR was developed for vermin such as mice and wild cats. Compared with the aforementioned existing methods, the development policy of the proposed method is to repel vermin rather than kill them. MiVeReR employs changeable stimuli, thereby enhancing the effectiveness of the expulsion signals. In addition, image data are used to compute the location of wild animals to focus on the calculated location and accurately exert the expulsion signals on the target vermin. These two considerations allow the robot to effectively repel vermin. Finally, Figure 1 illustrates the concept of changeable stimuli and vermin targeting.
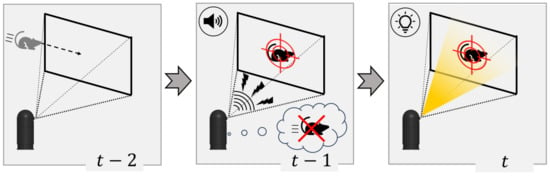
Figure 1.
Conceptual illustration of MiVeReR capable of generating changeable acousto-optic signals. Here, MiVeReR generates different acousto-optic signals while focalizing on the mouse at times and t after its detection at .
The design concept of MiVeReR includes the following five points. MiVeReR is installed outdoors, such as on farms and ranches; thus, it needs to be on a stand-alone system. Furthermore, MiVeReR requires a waterproofing function, and it should be able to be deployed according to its use. More importantly, MiVeReR should be harmless to livestock and wild animals. Finally, MiVeReR needs to be built and assembled at a low cost. Next, MiVeReR positioned in or outside farms and ranches targets wild animals using a camera. Through the obtained image data, MiVeReR recognizes the movements of a wild intruder while retracing. Subsequently, MiVeReR continuously generates changeable expulsion signals until the intruder runs away.
2.2. Four Main Units of MiVeReR
To achieve the expulsion task, MiVeReR is primarily composed of four main units: a visual sensing unit, a control unit, an actuation unit, and an acousto-optic signal generation (AOSG) unit. Figure 2 illustrates the control architecture of MiVeReR to describe individual units.
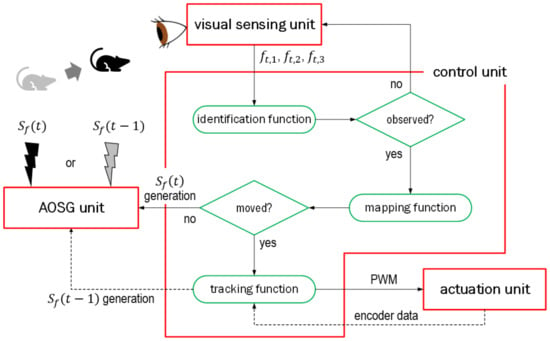
Figure 2.
Illustration for the control architecture of MiVeReR.
First, the visual sensing unit observes the surroundings and assesses whether there is an intruder, such as a wild animal. In this unit, a web camera (ELP 1080P 200HDUSB, Ailipu Technology Co., Ltd., Shenzhen, China) is employed to observe the surroundings. In practice, the web camera allows MiVeReR to monitor intruders day and night. Three consecutive image data are obtained at interval T using the camera. The output of this unit at time t is the reconstituted data , where , by referring to the robot’s coordinate system. The details on the process of in the unit are described in the next section.
Second, the control unit examines whether there exists an intruder in the data obtained by the visual sensing unit to compute the location of the intruder and track its movements. To perform complex operations, Raspberry Pi4 Model-B 4 GB is used as the main controller and coded based on the Python 3.11.9 and Open CV 4.9.0 software environment [35]. This unit comprises three functions: identification, mapping, and tracking (Figure 2). To begin, the identification function determines the existence of an intruder from . This function outputs a two-alternative answer such as existence and nonexistence. The computation results are then used in the next functions. The details on the computational process are explained in the next section. Next, the mapping function obtains the location of the intruder. Finally, based on the obtained location, the tracking function generates pulse width modulation (PWM) signals using a tracking-function controller (Arduino Mega 2560, Arduino Co., Ltd., Lombardia, Italy) with a motor controller (MDV 2 × 2A DC Motor Controller (L298N), Zhiwei Robotics Corp., Shanghai, China) to enable the robot to focus on the intruder. Using the coordinates of the desired target, the distance to the target is calculated, and adequate PWM signals are generated.
Third, the actuation unit moves toward the position provided by the control unit. In this unit, two types of rotation motions in the yaw and roll directions are realized. For horizontal rotation generation, a DC motor (TG-47G-SG-5-HA, TSUKASA Co., Ltd., Tokyo, Japan) is used to achieve significant torque gains. The mechanical structure is explained in the next subsection. For vertical rotation generation, a servo motor (HS-M7990TH, Hitec Multiplex Japan, Inc., Tokyo, Japan) is used. The encoder signals from the two motors are input to the tracking function of the control unit.
Fourth, the AOSG unit generates repellent signals, focused on the target intruder. The repellent signal used in this unit at time t is defined as , where and denote sound and light signals, respectively. In practice, to generate , two types of hardware devices are combined. First, is realized using a speaker (T440 II, Pioneer Corp., Tokyo, Japan). Second, generated using a light-emitting diode (LED) flashlight (X004, Alonefire Co., Ltd., Shenzhen, China) provides four-color lights: red, green, blue, and white. Based on these hardware specifications, the generable frequency range of is from 5000 Hz to 20,000 Hz. Specifically, with different frequencies can be generated by the variations of 1000 Hz within the range. Before is outputted, a selected frequency is combined with one sound among a siren, a dog bark, and a gunshot. Next, is lit in two lighting patterns. After one color light is assigned, flashes on and off. On the other hand, is on. For and , the start time and the duration are controlled separately. When is generated, the combination of and depends on the input to the control unit. The output is divided into the same and a different according to the intruder. Details of these combinations and the generation control of are explained in the next section.
2.3. Hardware Configuration
Figure 3 shows the outward frame and the internal structure of the MiVeReR prototype. An elongated robot is designed and developed to minimize the placement space on the farm. In Figure 3a, the top part is round so that rainwater or dust and tree branches do not accumulate. To expand the field of view (FoV) of MiVeReR by rotation, the upper and lower frames of the external form are separated, as shown in Figure 3b. The external form is produced using polylactic acid materials. The lower frame of the robot is made of aluminum alloy to allow its use in wet environments. The colors of the outward frame are changed according to displacement locations so that farmers are not surprised by the robot’s appearance.

Figure 3.
Outward frame and internal structure of the MiVeReR robot prototype; (a) outward frame; (b) internal structure.
From a structural layout perspective, as shown in Figure 3b, the inner configuration of the MiVeReR prototype is classified into three parts: top, middle, and bottom. The bottom part is surrounded by aluminum beams. A portable battery (Jackery 240, Jackery Japan Inc., Tokyo, Japan) is positioned in the bottom part. The middle part includes the main and motor controllers and the DC and servo motors. The middle part is connected to the upper section of the bottom part and rotates around a connected rotor horizontally using the DC motor. The top part contains the web camera, LED flashlight, and speaker. Specifically, the servo motor in the middle part is directly connected to the top part, which allows the vertical rotation of the top part. After the upper frame focuses on intruders, MiVeReR enables the generation of directional acousto-optic signals.
As shown in Figure 4a, the direction of gravity is denoted by . The horizontal direction is defined as rotating counterclockwise from . lies counterclockwise from , and and intersect at origin O. Figure 4b shows the dimensions of the outward frame of MiVeReR.
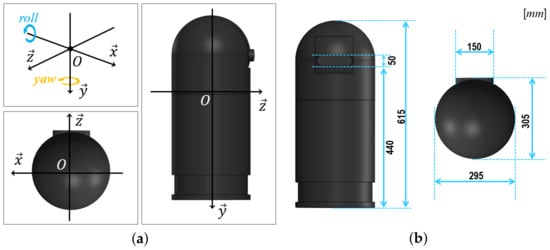
Figure 4.
Coordinate systems and the dimension of the MiVeReR prototype; (a) definition of coordinate system; (b) dimension of outward frame.
In Figure 5, the valid FoV ranges of MiVeReR based on the visual sensing unit are defined according to the horizontal and vertical planes. As explained in Section 2.1, MiVeReR targets at mice and wild cats. Depending on their average sizes in Japan, individual ranges of measurements are set to 1.5 m and 4 m, respectively. Due to the height of the camera, a blind zone of 40 cm exists. The use of the DC and servo motors enables two types of rotational directions. The DC motor makes the upper frame rotate along around . This rotational direction is called the yaw rotation (see the left side in Figure 4a). The top part rotates along around , which is called the roll rotation.
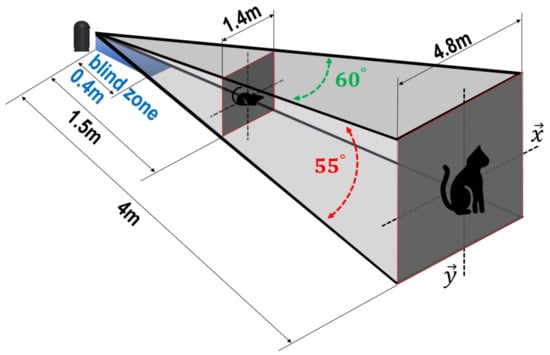
Figure 5.
Illustration for valid FoV ranges of MiVeReR.
3. Expulsion Control Scheme of MiVeReR
3.1. Overall Control Flow
As shown in Figure 2, MiVeReR comprises four main units, and the control unit comprises three functions. Under this control architecture, the operation routine of MiVeReR begins with the input of the output data from the visual sensing unit at t. Next, from , the control unit computes the existence of an intruder and its position. To target intruders, the motor operations of the actuation unit are conducted. In addition, according to the commands of the control unit, the AOSG unit generates the desired value as output. Depending on the situation, the operation routine either returns to the visual sensing unit or forwards the commands to the AOSG unit from the control unit without involving the actuation unit.
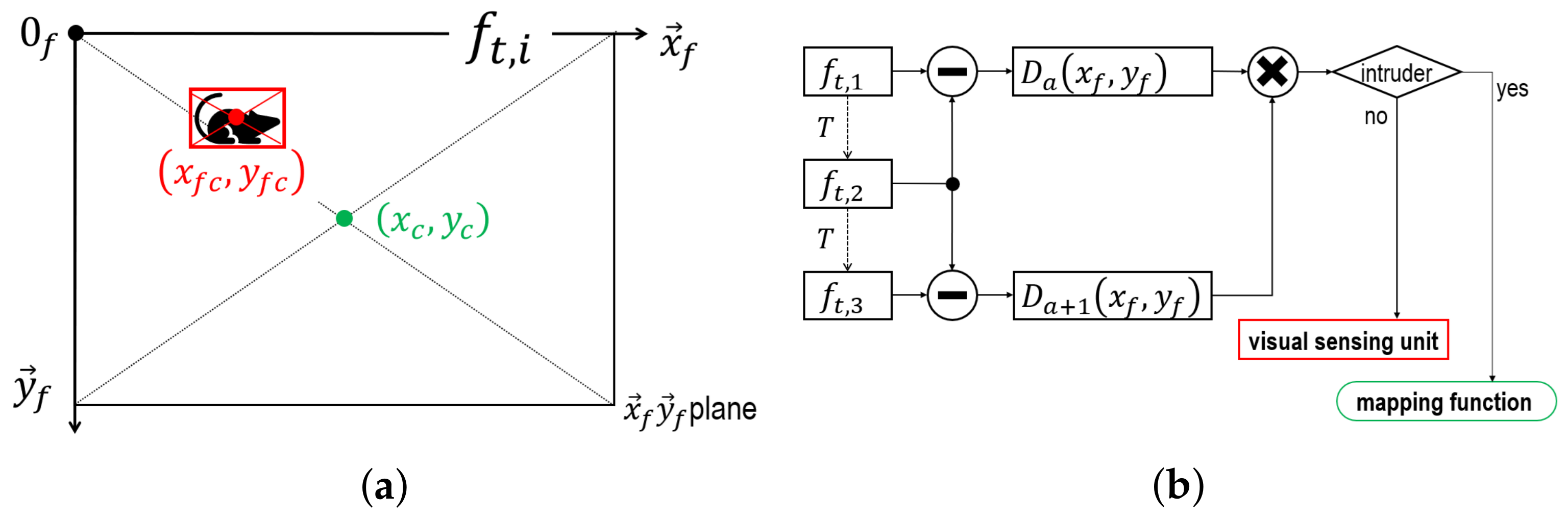
The detailed control flow is explained. The surrounding scene at t within the valid range is read by the visual sensing unit (see Figure 5). Next, the identification function first determines whether there is an intruder based on . Using as illustrated in Figure 6a, the horizontal and vertical directions are, respectively, defined as and . Unless an intruder exists, MiVeReR continues to observe its surroundings. When an intruder is detected, the mapping function outputs its location with respect to and . Here, the top-right corner of is set as the origin with respect to and . The directions of and correspond to and , respectively (Figure 4a). In addition, at t, a central coordinate in the plane composed of and is defined as . When the intruder remains stationary at the same location, the control unit forwards an generation command to the AOSG unit. If the intruder moves, the tracking function calculates the displacements to from to allow MiVeReR to trace it. After the displacements are transformed into PWM signals, they are transferred to the actuation unit. In practice, to correspond to , the actuation unit controls the rotations of the two motors. After the movements of the displacement by the actuation unit, the tracking function sends a movement completion message to the AOSG unit. Then, the AOSG unit exerts signals on the intruder.
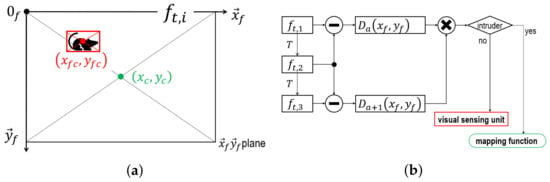
Figure 6.
Definitions and control flow of identification function; (a) surrounding scene at time t; (b) flow of identification function.
3.2. Control Flow from Identification to Mapping
The identification–mapping control comprises two functions in the control unit. Before this control flow is explained, several definitions are provided. The visual sensing unit at t outputs , discretized into 640 × 480 pixel blocks at intervals of T. Specifically, the plane consists of 640 × 480 pixel blocks from along and . The color of each pixel block is discretized into 0−256 numbers. Using both the coordinate system with respect to and and the color value, each pixel on the plane is identified and represented by at t.
To discriminate the existence of an intruder within a valid range, the well-known three-frame difference algorithm [36] is employed in the identification function to detect the movement of the intruder. The three-frame difference algorithm allows MiVeReR to separate moving objects from the stationary background by comparing their values. Figure 6b illustrates the concept of the difference algorithm and its computation flow. By distinguishing between and , the difference data are obtained. Similarly, the calculation between and yields . If the intersection between and bit by bit is empty, it is determined that no object has moved, i.e., no intruder has been observed. Otherwise, the next process to locate an intruder is followed.
After the intruder is detected, its is estimated using the mapping function (Figure 6a). First, based on the latest data, the pixels corresponding to the border of the intruder are assigned as 1. The remaining pixels are set to 0. Second, edges are drawn from the borders of consecutive pixels to form the contour of the intruder. Third, a rectangular bounding box containing the contour is computed. Specifically, the smallest rectangle with the minimum perimeter condition for the contour is obtained. If multiple bounding boxes are generated on the plane, the box with the largest area is determined as the intruder to trace. Based on the selected bounding box, its centroid is calculated and is drawn on the plane as a red point.
3.3. Control Flow from Tracking to Stimulation Generation
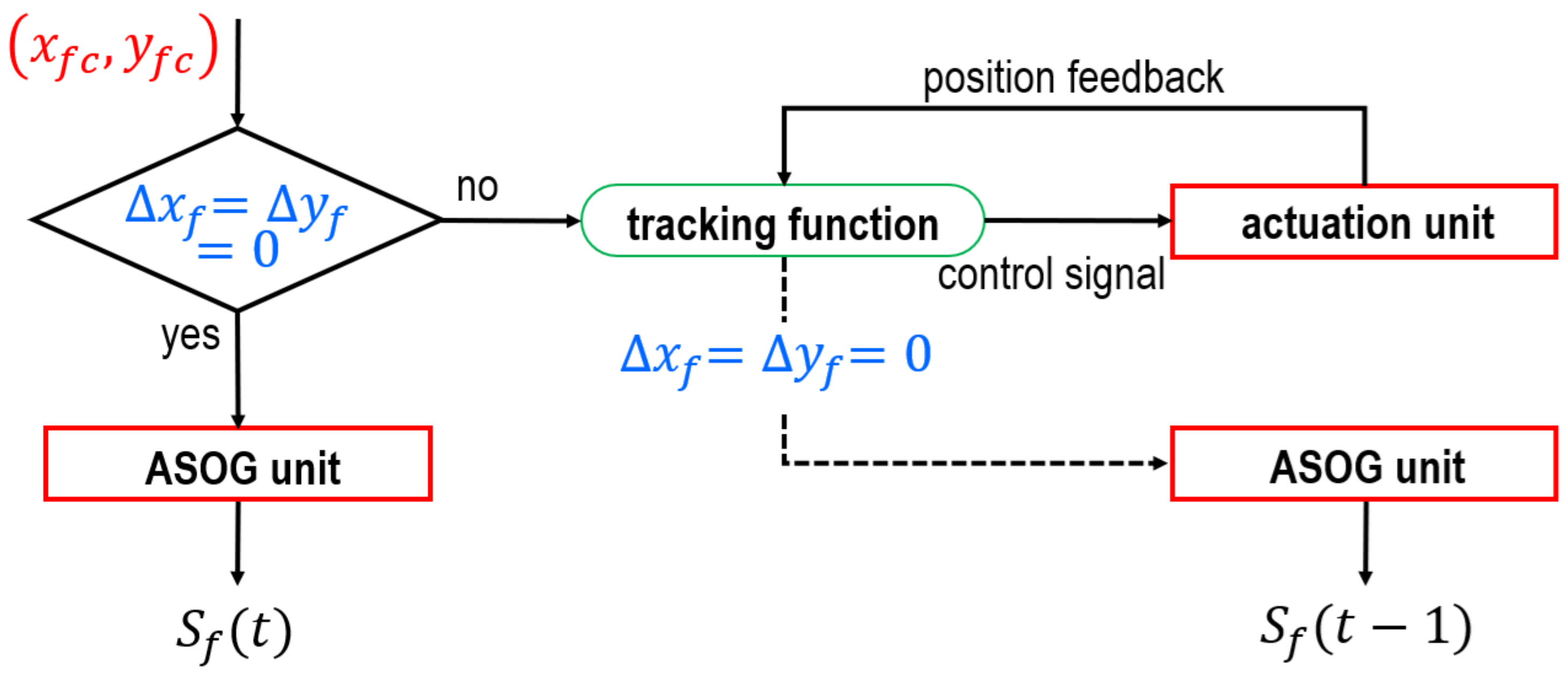
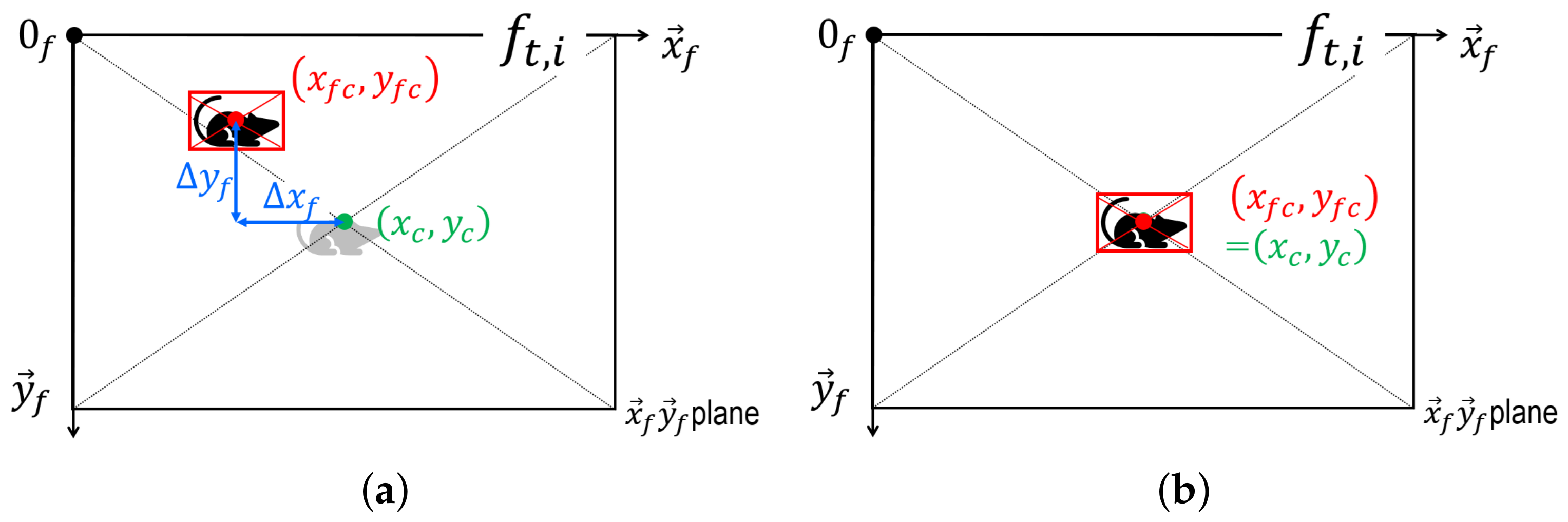
This subsection describes the computation process of the control, actuation, and ASOG units based on . The control unit examines whether the intruder moves by comparing with . Figure 7 presents the control flow of generation depending on two conditions. As illustrated in Figure 8a, and denote the differences between and and between and , respectively. Based on and , two cases are classified according to the movements of the intruder.
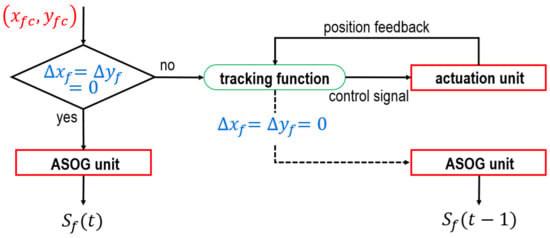
Figure 7.
Illustration for generation according to differences between and .
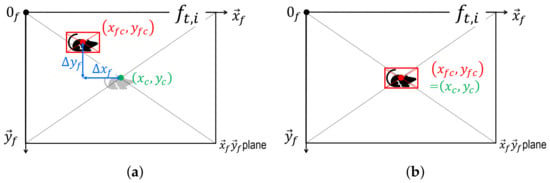
Figure 8.
Illustration for the differences ( and ) between and and between and ; (a) definitions of and ; (b) .
On the one hand, if the intruder moves, i.e., and/or , the tracking function in the control unit calculates and . The basic concept underlying this function is that the two points must remain coincident, as shown in Figure 8b. To achieve , a proportional and derivative (PD) controller is integrated. Next, the actuation unit, which receives input from the tracking function, drives the motors using a PD controller. According to the feedback outputs of the actuation unit, the tracking function examines whether and coincide with each other. Then, the state of their coincidence is sent to the AOSG unit (see Figure 7). On the other hand, if the intruder does not move between and t, the control unit transmits the state to the AOSG unit.
Depending on the movement state, the AOSG unit generates an acousto-optic signal, or . When and/or , after the AOSG unit is aligned with the intruder, as shown in Figure 8b, the unit sends the same stimulus as the generated at (see Figure 7). If , the unit sends a different stimulus as an unfamiliar signal. If the intruder remains stationary, MiVeReR changes the stimulation pattern and continues to emit signals until the intruder runs away. After the expiration of any assigned time, the visual sensing unit restarts emitting signals in the surroundings. Then, the control flow of MiVeReR is executed repeatedly until the intruder disappears within a valid range.
4. Experimental Results and Discussions
This section explains the experimental results on the effectiveness of MiVeReR and discusses its performance and feasibility. Specifically, the results are divided according to the experiment environment, i.e., indoor and outdoor environments.
4.1. Indoor Experimental Results
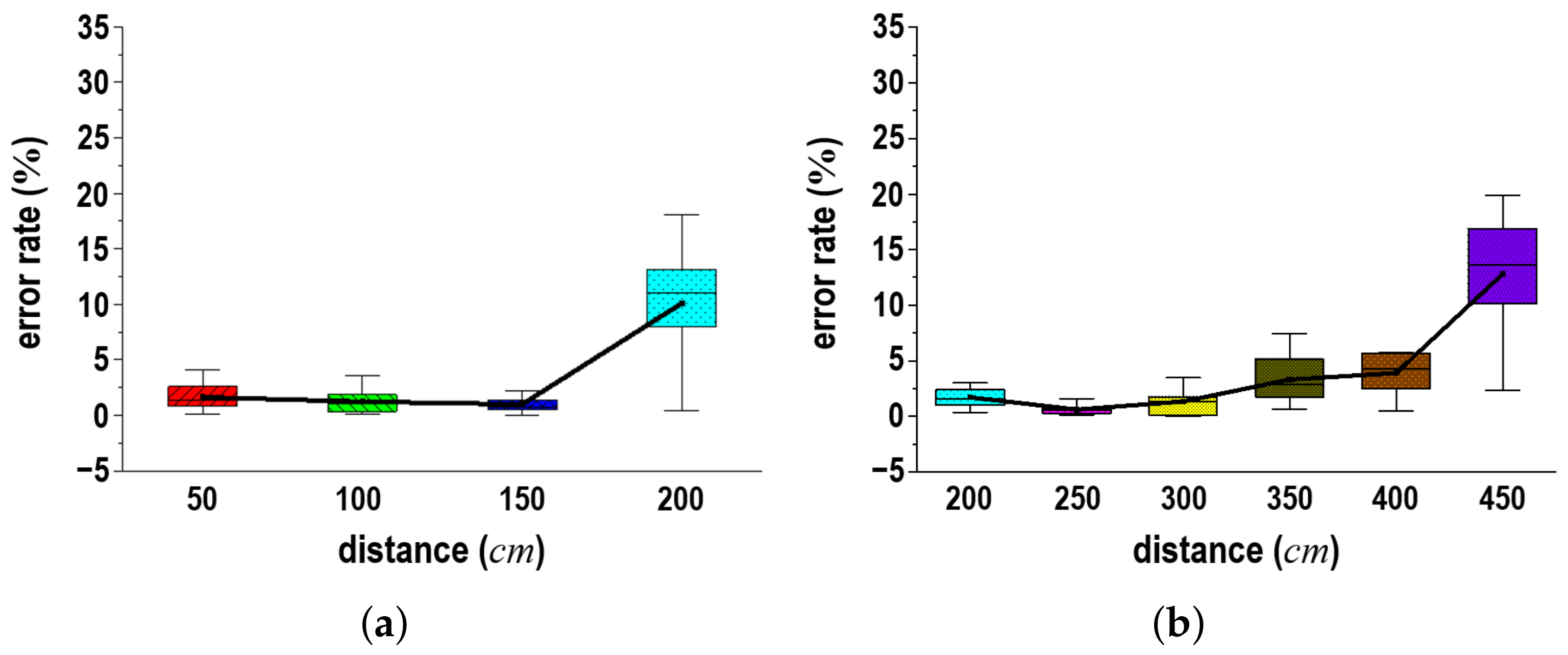
As a preliminary experiment, based on the existing studies [37,38], the number of effective pixels was counted according to the size of the assigned rectangle and analyzed at various distances. The objective of this experiment is to investigate the range to which wild animals can be recognized. The rectangle indicates a bounding box obtained after the computation of the mapping function, as explained in Section 4.2. Specifically, to count the number of effective pixels, two different-sized boxes (20 cm × 5 cm and 60 cm × 30 cm) were prepared to symbolize a mouse and a cat, respectively. Figure 9 shows statistical results obtained over 30 trials according to distances. Here, the error rate on the vertical axis indicates the ratio of the number of ideal pixels in each bounding box minus the counted pixels divided by the number of ideal pixels. In these statistical data, the error bars indicate 95% confidence intervals, and the boxes represent distributions of measurement data in the range of 25–75%. From the results, the error rates in Figure 9a and b increase sharply at a distance of 200 mm and 450 mm, respectively. Consequently, the monitoring ranges depending on the sizes of the bounding boxes were determined with reference to these results.
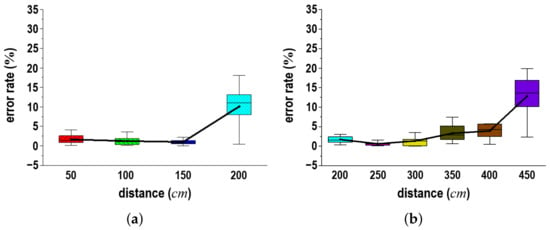
Figure 9.
Experimental results for counting the numbers of effective pixels according to distances; (a) bounding box with a size of 20 cm × 5 cm; (b) bounding box with a size of 60 cm × 30 cm.
From here, the results of experiments conducted are given to evaluate the effectiveness of the control flow using the four main units of MiVeReR. First, to investigate the computation processes of the identification and mapping functions, measurement and calculation tests for were conducted. Regarding the experimental setting, an object with a size of 60 cm × 30 cm was placed at the four positions – (Figure 10a). Under the same conditions, the experiments were repeated 30 times. Figure 10b shows the measurement and calculation results of for the object, where the arbitrarily assigned positions – correspond to , , , and , respectively. In the statistical data of , the error bars indicate 95% confidence intervals, and the boxes represent distributions of measurement data in the range of 25–75%. Despite slight variations according to individual positions, the results were within the range of the assigned positions. After the identification of the function outputs , , and , we confirmed that the mapping function can accurately compute .
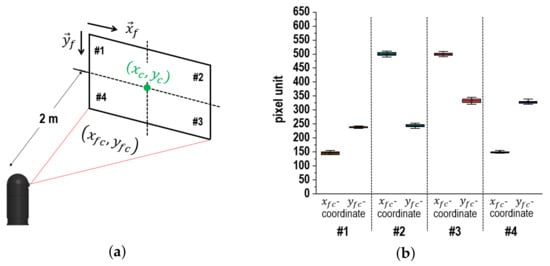
Figure 10.
Experimental results for the location measurement of an object at four assigned positions from to through and ; (a) illustration of experimental setting; (b) measurements for four locations.
Next, to analyze the accuracy of the MiVeReR’s recognition based on the identification and mapping functions, experiments on the location measurement of were carried out. Specifically, means (320, 240) with respect to and coordinate systems. Although the settings shown in Figure 10a were employed, the object positioned at was moved at intervals of 500 mm in the range of 50 cm through 400 cm. Figure 11 presents the statistical analysis results of 30 trials over distances to the measured object. As predicted, the measurement accuracy degraded at a long distance (i.e., far away, at 300 cm). When the object was located at 200 cm, the average values and their standard deviations (SDs) of and were 320.2 (SD: 1.89) and 239.8 (SD: 2.31), respectively. In the case of 400 cm, the average values and the SDs of and were given by 321.5 (SD: 5.54) and 239.4 (SD: 6.17), respectively. The results indicate that the recognition performance is considered satisfactory for practical use considering the size of the target animal.
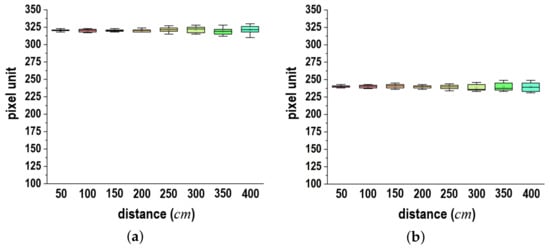
Figure 11.
Experimental results for the location measurements according to distances from MiVeReR to along ; (a) location measurements of ; (b) location measurements of .
Second, to examine the tracking accuracy of the control and actuation units, experiments were conducted based on the settings shown in Figure 10a. When the object used in the previous experiments was repeatedly moved from an assigned location to individual positions (, , , and ), we examined how accurately MiVeReR followed the target locations. Figure 12 shows the results where the actuation unit generated the movements of MiVeReR according to and calculated by the tracking function. The left and right graphs show the movement results in the and directions, respectively. The results for exhibited wider variations than those for . As explained in Section 2.3, the overall upper frame rotates along , whereas the AOSG unit rotates along . Therefore, it was thought that the two directions varied. Thus, we verified that the control flow from the tracking function to the actuation unit allowed MiVeReR to generate movements that corresponded more closely to the assigned locations.
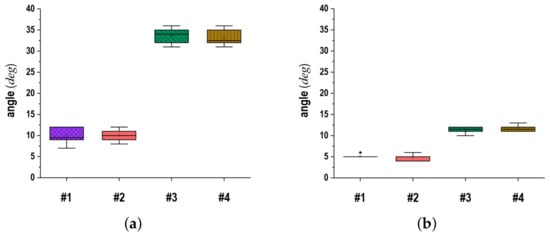
Figure 12.
Experimental results for the tracking accuracy of the control and the actuation units based on the experimental settings in Figure 10a; (a) rotations in direction; (b) rotations in direction.
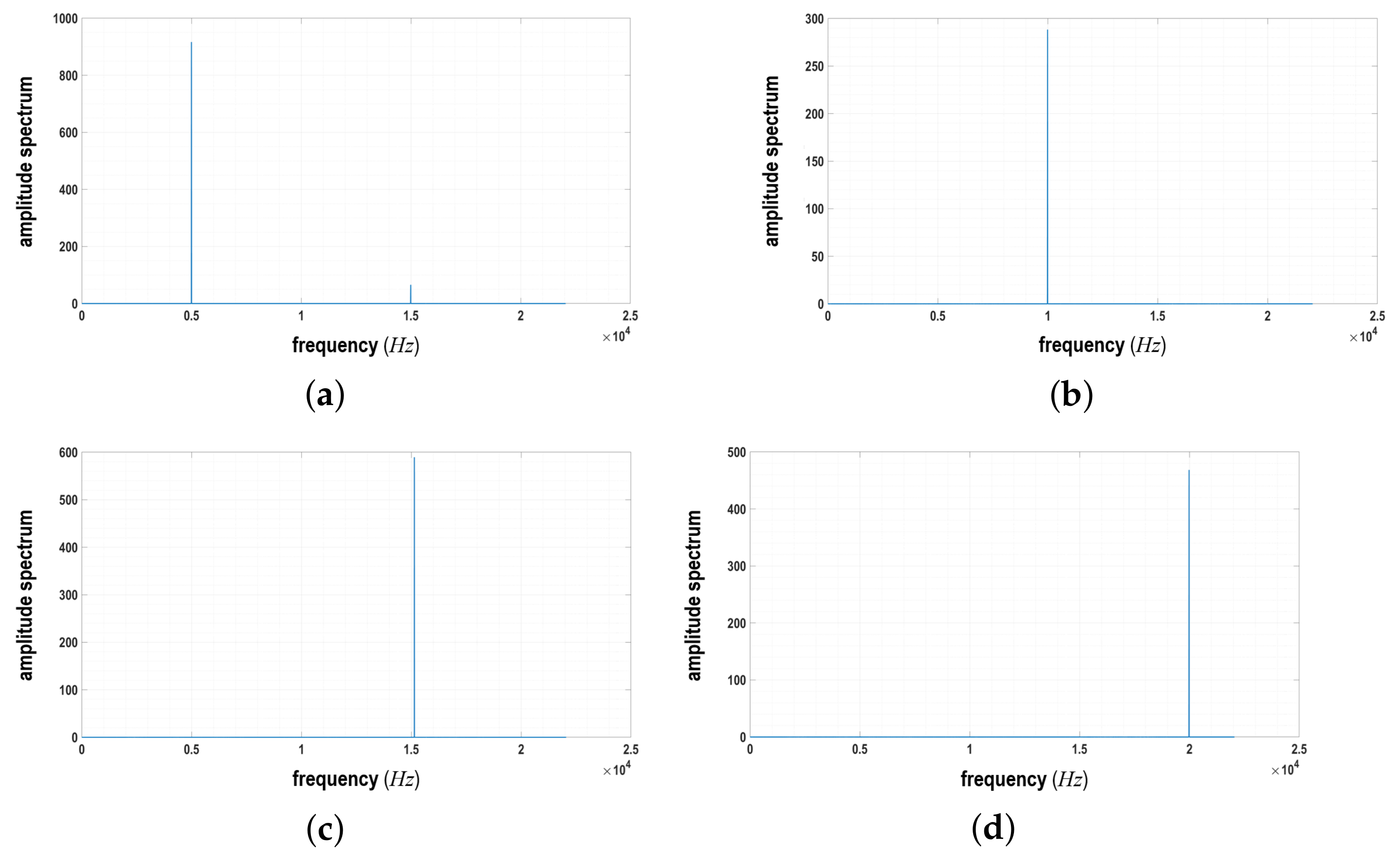
The third experiment for generation was conducted to verify the signal generation of the ASOG unit. To begin, tests were conducted. Four colors of light (red, green, blue, and white) were sequentially lit according to the control signals. Simultaneously, the wavelength of each light color was measured using a GoSpectro handheld spectrometer (Goyalab Co., Talence, France). The objective of this experiment was to examine whether the ASOG unit generates the color lights corresponding to the control commands. Figure 13 shows snapshots of the experimental scenes and the wavelength measurements during the lighting of each light. As expected, we confirmed that MiVeReR could cast four colors of light according to the commands. From the results, it was verified that MiVeReR could handle the diverse generation. Next, we conducted experiments for generation according to frequency changes. Figure 14 shows the measurements of the amplitude spectra as functions of frequency. In practice, after pulse-code modulation recording using a smartphone, the measured spectra were analyzed using the Fourier transform method in the Matlab R2023b software. MiVeReR can also generate assigned at different frequencies. According to the results, the ASOG unit facilitates the generation of various signals according to the intruder’s situation.
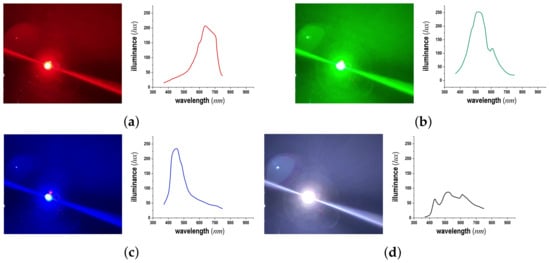
Figure 13.
Experimental results for generation in the ASOG unit when four colors such as red, green, blue, and white were lit; (a) red light; (b) green light; (c) blue light; (d) white light.
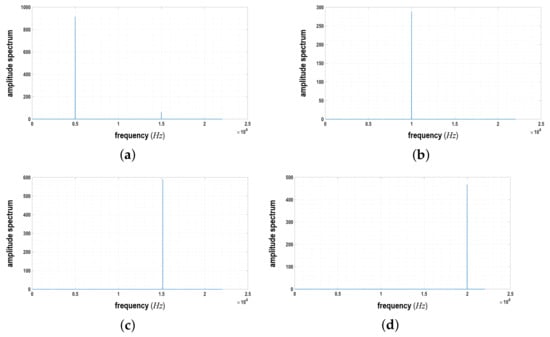
Figure 14.
Experimental results for generation in the ASOG unit according to four different frequencies (blue lines); (a) 5000 Hz; (b) 10,000 Hz; (c) 15,000 Hz; (d) 20,000 Hz.
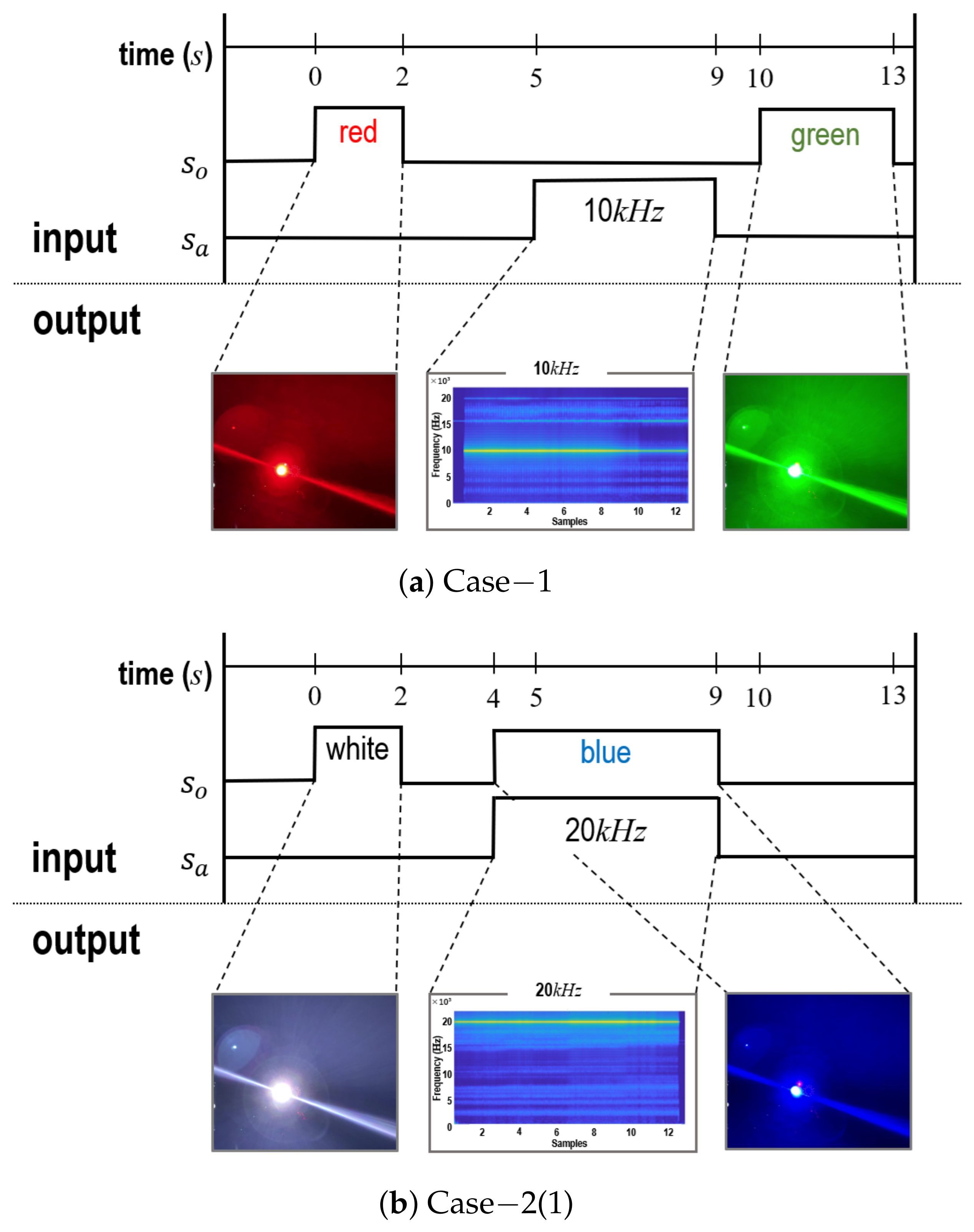
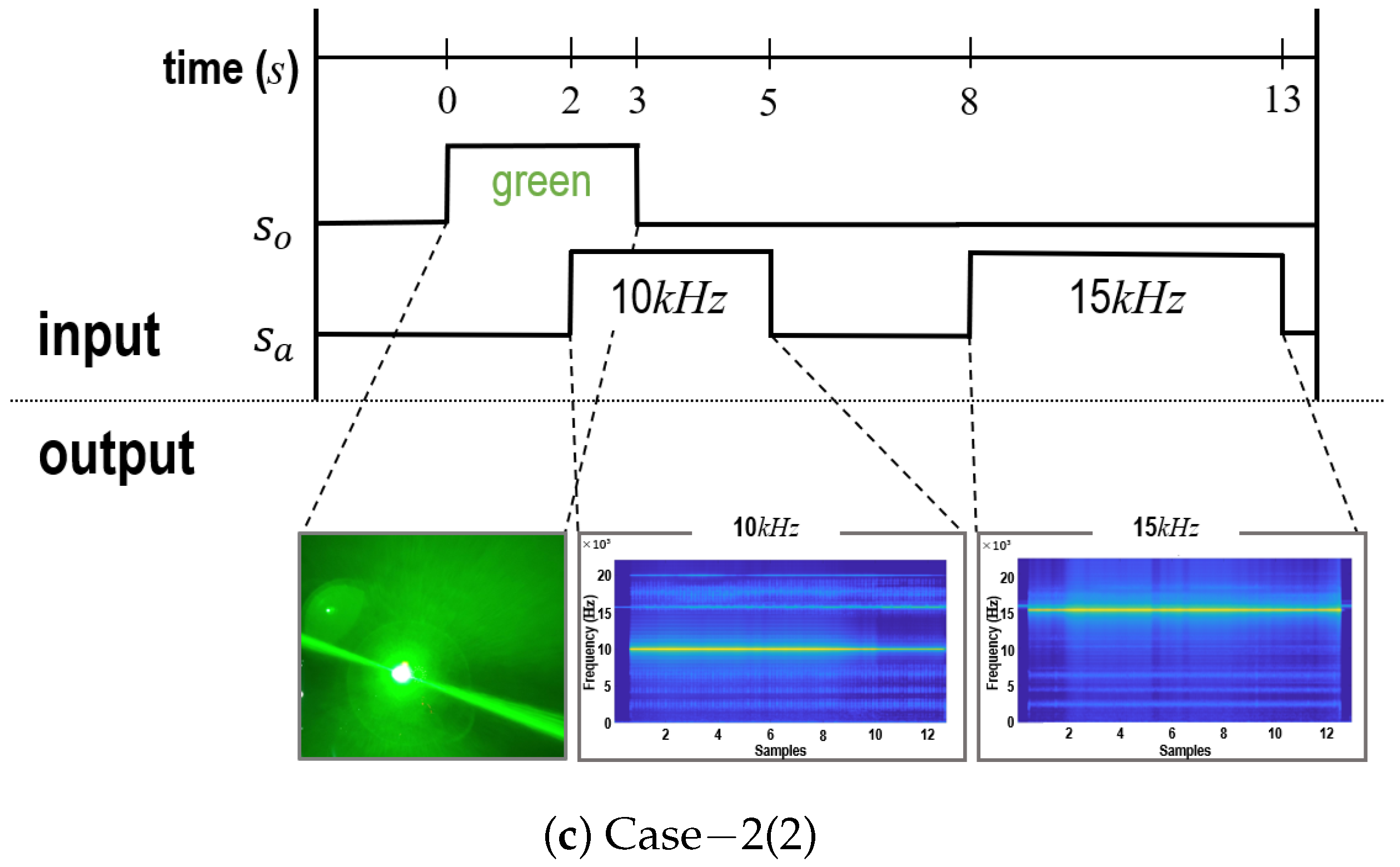
Fourth, to verify the feasibility and computation process of generation under the control flow of MiVeReR, experiments were conducted. Figure 15a shows the results for generation after object detection. Here, this experimental setting is referred to as Case−1. The ASOG unit hit a red flash for 2 s, which is denoted as . At 5 s, a 10,000 Hz sound was generated for 4 s, which is denoted as . From 10 to 13 s, with a green flash was lit. From the results, the generations could be accurately conducted according to the control commands. Next, Figure 15b,c show the consecutive experimental results for Case−2. After object detection, the ASOG unit generated at . However, the object remained stationary. Then, the ASOG unit based on the control unit generated another at t. In the first stage (Case−2(1) in Figure 15b), the ASOG unit generated a white flash for 2 s. Then, from 4 to 9 s, the ASOG unit simultaneously generated the blue flash as and a 20,000 Hz sound as . However, the object did not move. In the second stage (Case−2(2), see Figure 15c), the ASOG unit generated a green flash for 3 s. While lighting the green flash, specifically at 2 s, the ASOG unit generated both a green flash and a 10,000 Hz sound. At 8 s, only the sound frequency was changed to 15,000 Hz. The results show that the combination of acousto-optic signals could be verified according to the situation based on the control unit.
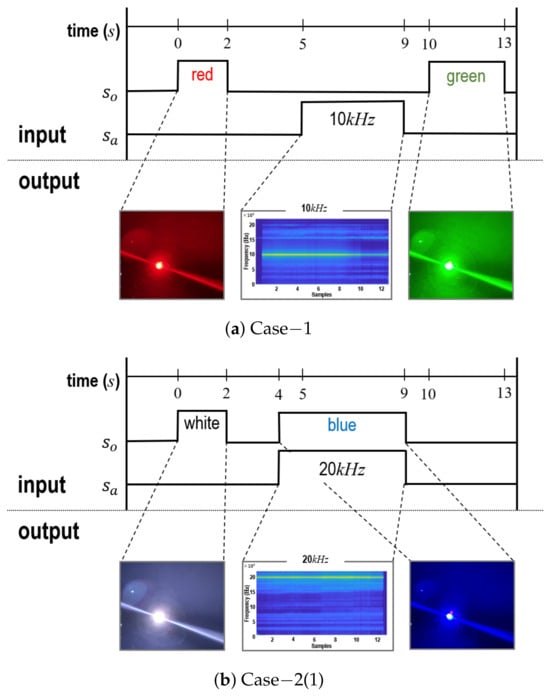
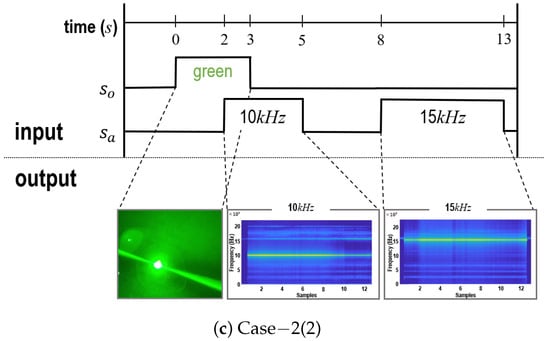
Figure 15.
Experimental results for the generation of under the control flow of MiVeReR. Here, (a) Case−1 indicates the generation of after the detection of an object. (b) Case−2(1) indicates the generation after the detection of another object. Since the object remains stationary, (c) Case−2(2) entails another expulsion-signal generation.
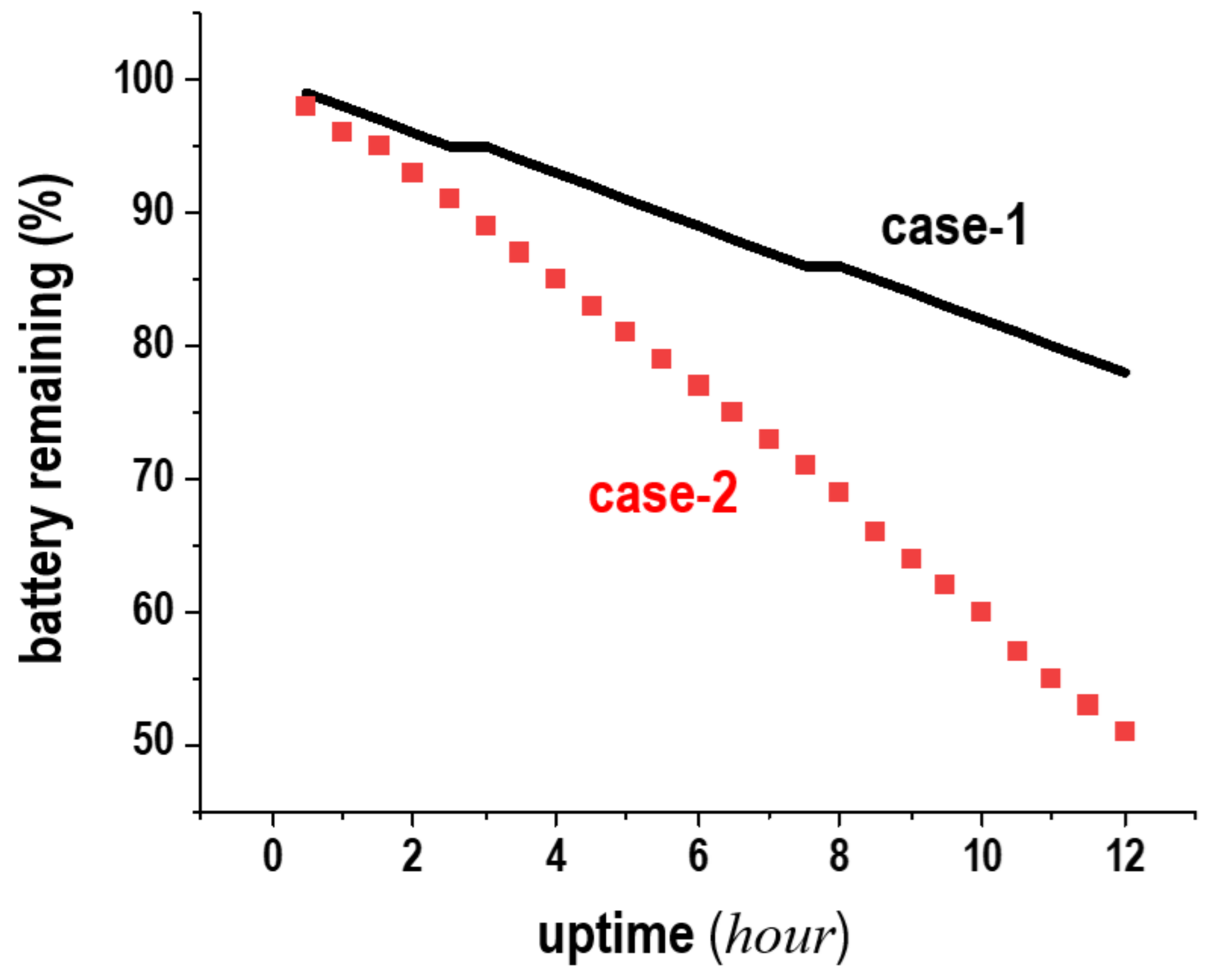
Finally, battery-life experiments were conducted to verify how long MiVeReR could operate in the field. Figure 16 shows the residual values of the battery for two operation types. The bold black line indicates that only the visual sensing and control units are operated repeatedly. The red dotted line represents the continuous and recurring operations of the four units based on the overall control flow from the visual sensing unit to the ASOG unit. From the two cases, after 12 h of operations, the battery residual values were 78% and 51%, respectively. We confirmed that MiVeReR exhibited sufficient performance for one day to monitor intruders and generate .
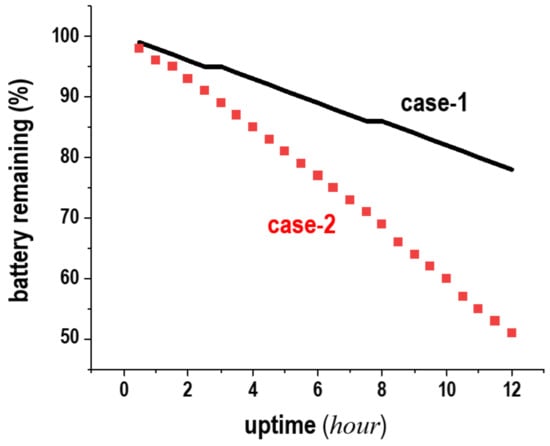
Figure 16.
Experimental results for the battery life according to the operation situations of MiVeReR.
4.2. Outdoor Experimental Results
To evaluate the effectiveness of the overall MiVeReR operation, field tests were conducted at different locations. All experiments were conducted in compliance with the protocol which was reviewed by the Institutional Animal Care and Use Committee and approved by the President of the University of Miyazaki (Permission Number: 2021-044-2). The setup of the first field experiments conducted in a feed shed close to a swine barn is shown in Figure 17a. This location was selected since mice appeared night and day. The distance from the camera of MiVeReR to the wall was about 1.5 m. The results of MiVeReR confirm its successful startup operation after detecting a mouse, tracking ability, and generation performance. In addition, mice were typically observed to be stationary in response to (see Figure 18). Many mice of different sizes than expected were observed. Although we observed situations in which mice ran away in response to , we could not determine whether they reappeared since they were not followed up. It is clear that MiVeReR can generate and send to intruding mice, and individual mice respond to the signal.

Figure 17.
Snapshots of test environments of MiVeReR; (a) feed shed in swine barn; (b) cattle kraal.

Figure 18.
Snapshots of a mouse responding to of MiVeReR in a feed shed; (a) approaching; (b) moving away.
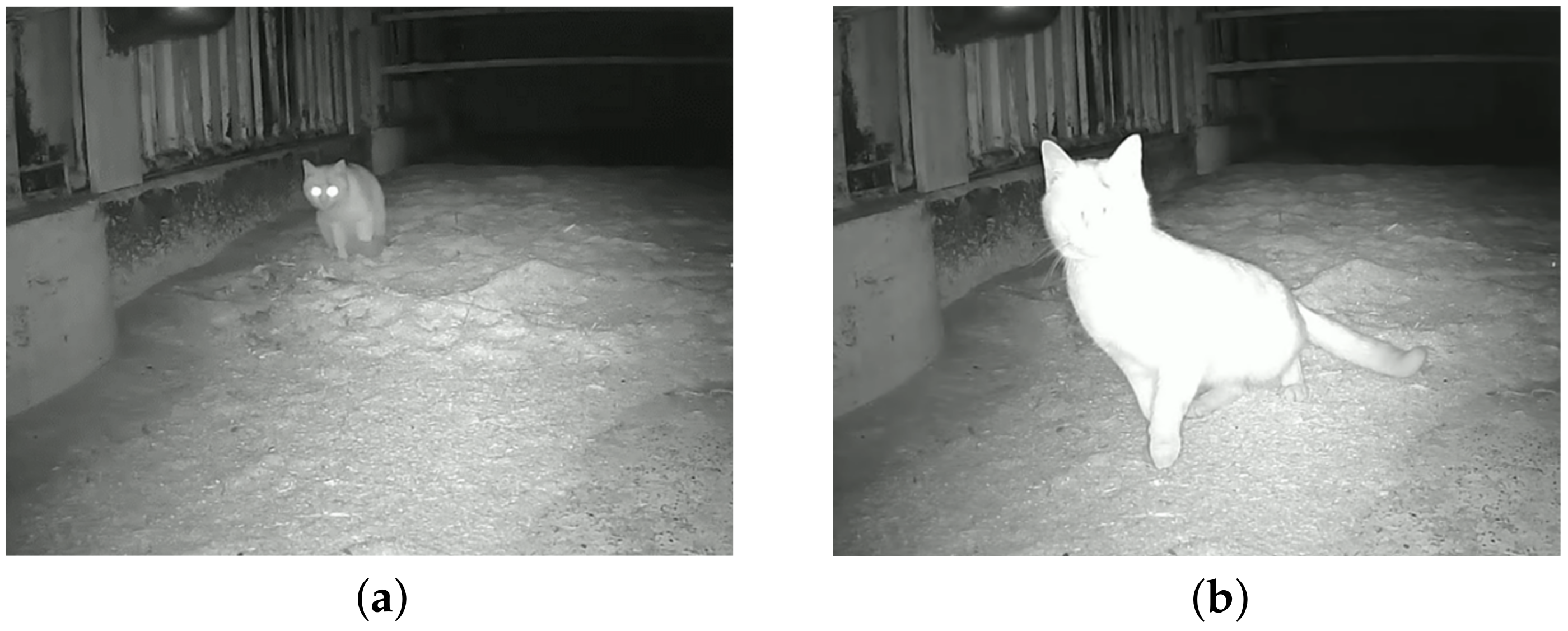
We also conducted experiments to evaluate the operation of MiVeReR in a cattle kraal. Practically, this kraal was an empty space where cattle were not raised. MiVeReR was evaluated at this location since we heard from workers that wild cats frequently appeared. As shown in Figure 19, the snapshots demonstrate that MiVeReR successfully detected a cat within the target area and outputted . In addition, the combined of a white flash and 5000 Hz sound showed that the cat reacted to the signal from MiVeReR. To analyze the cat’s reactions to , a video clip was recorded and used. Through the video data, we observed that the invasion of wild cats caused MiVeReR to track the cats and hit successfully. In addition, the different reactions of the cat according to (Figure 19b,c) confirmed that MiVeReR generated depending on the cat’s responses. Finally, Figure 20, taken from a different day, shows the snapshots of the MiVeReR’s tracking depending on the movements of the wild cat. After the detection of an intruder, MiVeReR hit (). When MiVeReR generated by focusing on the intruder, the intruder appeared wary of its surroundings (). The intruder was pictured running away to a place where there was no (). Consequently, the experimental results could confirm the validity of the generation of and the intruder’s location tracking by MiVeReR despite the intruder’s movements.


Figure 19.
Snapshots of wild cat responding to of MiVeReR in a cattle kraal; (a) appearing; (b) surprised look; (c) looking wary; (d) running away.

Figure 20.
Snapshots of MiVeReR’s tracking of wild cat where the snapshots were placed in chronological order from left () to right ().
4.3. Discussions
From the experimental results, intruder monitoring and tracking and AOSG via expulsion control were verified using the four main units. The results confirm that MiVeReR repels intruders while adapting to their reactions. However, MiVeReR is not yet complete. Based on the data analyses, the following reasons are provided. (1) To avoid harming other animals, including humans, the generation time of acousto-optic signals was limited. (2) Due to the same reason as (1), the intensity of the acousto-optic signal was insufficient to immediately repel intruders. To overcome this limitation, we attempted to improve the transmission of acousto-optic signals. (3) Different from (1) and (2), the three-frame difference algorithm was easily affected by the illumination of the surroundings. Depending on an interval between each frame, it would be difficult to recognize when a wild animal moves swiftly. If there are animals that move quickly in different directions, this algorithm alone cannot cope with this condition.
Next, the well-known Gaussian mixture model [39] was tentatively applied to enhance the accuracy of the identification function, as explained in Section 3.2. Recently, to distinguish and identify several wild animals, we have studied a deep learning-based mapping function. To expand the scope of monitoring and cope with smaller wild animals, the performance improvements of hardware devices including cameras have been considered. In addition, several actuators are employed and tested to achieve rapid and effective irradiation tracking. We cannot conclude that MiVeReR completely repels intruders. It would be difficult to confirm that the proposed MiVeReR could reduce the adaptability of wild animals to repulsion signals. Due to the limitations of vermin identification, this was because we did not perform the follow-up examinations of the wild animals. Furthermore, it is difficult to understand the responses of intruders due to insufficient knowledge of animal behaviors, including physiological characteristics. Therefore, we intend to promote solidarity with zoology researchers to address these issues. Finally, to expand the monitoring areas and improve the functions of MiVeReR, we plan to incorporate mobile devices such as wheels. Therefore, addressing these remaining issues using MiVeReR is our future research direction.
5. Conclusions
This study proposes MiVeReR to monitor the invasion of wild animals, especially mice and wild cats, track them, and generate expulsion acousto-optic signals to repel them. We expect that the adaptability of wild animals to existing repulsion systems can be weakened by changing the generated acousto-optic signals while tracking their movements, thereby achieving long-term and effective vermin expulsion. To verify the effectiveness and reliability of MiVeReR, verification experiments were conducted for its four units. In addition, several experiments were conducted in our laboratory to evaluate target tracking and AOSG. According to the results, MiVeReR tracked an intruder after detection and generated acousto-optic signals to repel it. In addition, experiments in real-world environments were conducted. Through these field experiments, we confirmed that MiVeReR successfully detected the invasion of mice and wild cats, after which, as expected, it generated and broadcast audible and visual signals to repel them. The invaders cautiously responded to the signals. MiVeReR and its control flow can help prevent intruder adaptability to vermin expulsion systems due to changeable signal generation while tracking vermin.
Author Contributions
Conceptualization, G.L. and T.Y.; methodology, G.L. and T.Y.; software, T.Y.; validation, T.Y., T.K. (Tasuku Koga) and T.K. (Tota Kuga); formal analysis, T.Y. and T.K. (Tasuku Koga); investigation, G.L.; resources, G.L. and T.Y.; data curation, T.Y.; writing—original draft preparation, G.L.; writing—review and editing, T.Y., T.K. (Tasuku Koga) and T.K. (Tota Kuga); visualization, G.L., T.Y. and T.K. (Tasuku Koga); supervision, G.L.; project administration, G.L.; funding acquisition, G.L. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
All experiments were conducted in compliance with the protocol which was reviewed by the Institutional Animal Care and Use Committee and approved by the President of the University of Miyazaki (Permission Number: 2021-044-2).
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Acknowledgments
Special thanks to Shijie Ge and Hiroki Yokoyama for data analysis and technical assistance. Their extraordinary contributions have greatly improved the quality of this thesis paper.
Conflicts of Interest
The authors declare no conflicts of interest.
Abbreviations
The following abbreviations are used in this manuscript:
| MiVeReR | Miyazaki Vermin Repulsion Robot |
| AOSG | Acousto-optic signal generation |
| PWM | Pulse width modulation |
| FoV | Field of view |
References
- Annual Report on Food, Agriculture and Rural Areas in Japan FY 2022. Available online: https://www.maff.go.jp/e/data/publish/attach/pdf/index-224.pdf (accessed on 2 September 2024).
- Papakonstantinou, G.I.; Voulgarakis, N.; Terzidou, G.; Fotos, L.; Giamouri, E.; Papatsiros, V.G. Precision Livestock Farming Technology: Applications and Challenges of Animal Welfare and Climate Change. Agriculture 2024, 14, 620. [Google Scholar] [CrossRef]
- Lee, G.; Ogata, K.; Kawasue, K.; Sakamoto, S.; Ieiri, S. Identifying-and-Counting Based Monitoring Scheme for Pigs by Integrating BLE Tags and WBLCX Antennas. Comput. Electron. Agric. 2022, 198, 107070. [Google Scholar] [CrossRef]
- Casas, R.; Hermosa, A.; Marco, A.; Blanco, T.; Zarazaga-Soria, F.J. Real-Time Extensive Livestock Monitoring Using LPWAN Smart Wearable and Infrastructure. Appl. Sci. 2021, 11, 1240. [Google Scholar] [CrossRef]
- Karmacharya, D.; Herrero-García, G.; Luitel, B.; Rajbhandari, R.; Balseiro, A. Shared infections at the wildlife–livestock interface and their impact on public health, economy, and biodiversity. Anim. Front. 2024, 14, 20–29. [Google Scholar] [CrossRef]
- Doeschl-Wilson, A.; Knap, P.W.; Opriessnig, T.; More, S.J. Review: Livestock disease resilience: From individual to herd level. Animal 2021, 15, 100286. [Google Scholar] [CrossRef] [PubMed]
- Kappes, A.; Tozooneyi, T.; Shakil, G.; Railey, A.F.; McIntyre, K.M.; Mayberry, D.E.; Rushton, J.; Pendell, D.L.; Marsh, T.L. Livestock health and disease economics: A scoping review of selected literature. Front. Vet. Sci. 2023, 10, 1168649. [Google Scholar] [CrossRef] [PubMed]
- Barroso, P.; Gortázar, C. The coexistence of wildlife and livestock. Anim. Front. 2024, 14, 5–12. [Google Scholar] [CrossRef] [PubMed]
- Jori, F.; Hernandez-Jover, M.; Magouras, I.; Dürr, S.; Brookes, V.J. Wildlife–livestock interactions in animal production systems: What are the biosecurity and health implications? Anim. Front. 2021, 11, 8–19. [Google Scholar] [CrossRef]
- Ver Cauteren, K.; Breck, S. Overview of global wildlife–livestock interfaces: The array of conflicts and strategies to mitigate them. Anim. Front. 2024, 14, 30–39. [Google Scholar] [CrossRef]
- Msimang, V.; Rostal, M.K.; Cordel, C.; Machalaba, C.; Tempia, S.; Bagge, W.; Burt, F.J.; Karesh, W.B.; Paweska, J.T.; Thompson, P.N. Factors affecting the use of biosecurity measures for the protection of ruminant livestock and farm workers against infectious diseases in central South Africa. Transbound. Emerg. Dis. 2022, 69, e1899–e1912. [Google Scholar] [CrossRef]
- Ballejo, F.; Plaza, P.I.; Lambertucci, S.A. The conflict between scavenging birds and farmers: Field observations do not support people’s perceptions. Biol. Conserv. 2020, 248, 108627. [Google Scholar] [CrossRef]
- Giordano, S.; Seitanidis, I.; Ojo, M.; Adami, D.; Vignoli, F. IoT solutions for crop protection against wild animal attacks. In Proceedings of the 2018 IEEE International Conference on Environmental Engineering (EE), Milan, Italy, 12–14 March 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Micaelo, E.B.; Lourenço, L.G.P.S.; Gaspar, P.D.; Caldeira, J.M.L.P.; Soares, V.N.G.J. Bird deterrent solutions for crop protection: Approaches, challenges, and opportunities. Agriculture 2023, 13, 774. [Google Scholar] [CrossRef]
- Bruns, A.; Waltert, M.; Khorozyan, I. The effectiveness of livestock protection measures against wolves (Canis lupus) and implications for their co-existence with humans. Glob. Ecol. Conserv. 2020, 21, e00868. [Google Scholar] [CrossRef]
- Mysterud, A.; Rolandsen, C.M. Fencing for wildlife disease control. J. Appl. Ecol. 2019, 56, 519–525. [Google Scholar] [CrossRef]
- Jakes, A.F.; Jones, P.F.; Paige, L.C.; Seidler, R.G.; Huijser, M.P. A fence runs through it: A call for greater attention to the influence of fences on wildlife and ecosystems. Biol. Conserv. 2018, 227, 310–318. [Google Scholar] [CrossRef]
- Gnanasekar, O.; Dinesh, P.; Srividhya, K. Image processing based animal intrusion detection system in agricultural field using deep learning. In Proceedings of the 3rd International Conference on Intelligent Techniques in Control, Optimization and Signal Processing, Krishnankoil, Virudhunagar District, Tamil Nadu, India, 14–16 March 2024; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, M.; Gao, F.; Yang, W.; Zhang, H. Real-time target detection system for animals based on self-attention improvement and feature extraction optimization. Appl. Sci. 2023, 13, 3987. [Google Scholar] [CrossRef]
- Yoon, H.-D.; Kim, S.; Jang, Y.S.; Ghil, M.; Rha, W.; Seok, Y. A study on the modeling of the IoT-based motion pattern analysis system to exterminating harmful wild animals. In Proceedings of the International Conference on Information and Communication Technology Convergence, Jeju, Republic of Korea, 21–23 October 2020; pp. 1908–1911. [Google Scholar]
- Singh, P.; Krishnamurthi, R. Rodenticides and wildlife extermination. Int. J. Inf. Technol. 2024, 12, 178–188. [Google Scholar] [CrossRef]
- Simla, A.J.; Chakravarthi, R.; Leo, L.M. Agricultural intrusion detection (AID) based on the internet of things and deep learning with the enhanced lightweight M2M protocol. Soft Comput. 2023. [Google Scholar] [CrossRef]
- Iniyaa, K.K.; Divya, J.K.; Devdharshini, S.; Sangeethapriya, R. Crop protection from animals using deep learning. Int. J. Progress. Res. Sci. Eng. 2021, 2, 41–44. [Google Scholar]
- Erofeeva, E.V.; Surkova, J.E.; Shubkina, A.V. Rodenticides and wildlife extermination. Biol. Bull. Rev. 2022, 12, 178–188. [Google Scholar] [CrossRef]
- Hinds, L.A.; Belmain, S.R. Fertility control of rodent pests: Recent developments from lab to field. Integr. Zool. 2022, 17, 960–963. [Google Scholar] [CrossRef] [PubMed]
- Croft, S.; Aegerter, J.N.; Beatham, S.; Coats, J.; Massei, G. A spatially explicit population model to compare management using culling and fertility control to reduce numbers of grey squirrels. Ecol. Model. 2021, 440, 109386. [Google Scholar] [CrossRef]
- Croft, S.; Franzetti, B.; Gill, R.; Massei, G. Too many wild boar? Modelling fertility control and culling to reduce wild boar numbers in isolated populations. PLoS ONE 2020, 15, e0238429. [Google Scholar] [CrossRef] [PubMed]
- Bhusal, S.; Karkee, M.; Bhattarai, U.; Majeed, Y.; Zhang, Q. Automated execution of a pest bird deterrence system using a programmable unmanned aerial vehicle (UAV). Comput. Electron. Agric. 2022, 198, 106972. [Google Scholar] [CrossRef]
- Wang, Z.; Griffin, A.S.; Lucas, A.; Wong, K.C. Psychological warfare in vineyard: Using drones and bird psychology to control bird damage to wine grapes. Crop. Prot. 2019, 120, 163–170. [Google Scholar] [CrossRef]
- Mapari, R.; Bhangale, K.; Deshmukh, L.; Gode, P.; Gaikwad, A. Agriculture Protection from Animals Using Smart Scarecrow System. In Soft Computing for Security Applications. Advances in Intelligent Systems and Computing; Ranganathan, G., Fernando, X., Shi, F., El Allioui, Y., Eds.; Springer: Singapore, 2022; Volume 1397, pp. 539–551. [Google Scholar] [CrossRef]
- Robertson, M.R.; Olivier, L.J.; Roberts, J.; Yonthantham, L.; Banda, C.; N’gombwa, I.B.; Dale, R.; Tiller, L.N. Testing the effectiveness of the “Smelly” elephant repellent in controlled experiments in semi-captive asian and african savanna elephants. Animals 2023, 13, 3334. [Google Scholar] [CrossRef]
- Chen, Y.-C.; Chu, J.-F.; Hsieh, K.-W.; Lin, T.-H.; Chang, P.-Z.; Tsai, Y.-C. Automatic wild bird repellent system that is based on deep-learning-based wild bird detection and integrated with a laser rotation mechanism. Sci. Rep. 2024, 14, 15924. [Google Scholar] [CrossRef]
- Adami, D.; Ojo, M.O.; Giordano, S. Design, development and evaluation of an intelligent animal repelling system for crop protection based on embedded edge-AI. IEEE Access 2021, 9, 132125–132139. [Google Scholar] [CrossRef]
- Miao, J.; Rajasekhar, D.; Mishra, S.; Nayak, S.K.; Yadav, R. A microservice-based smart agriculture system to detect animal intrusion at the edge. Future Internet 2024, 16, 296. [Google Scholar] [CrossRef]
- Parveen, S.; Shah, J. A motion detection system in Python and OpenCV. In Proceedings of the 3rd International Conference on Intelligent Communication Technologies and Virtual Mobile Networks, Tirunelveli, India, 4–6 February 2021; pp. 1378–1382. [Google Scholar]
- Zhang, Y.; Wang, X.; Qu, B. Three-frame difference algorithm research based on mathematical morphology. Procedia Eng. 2012, 29, 2705–2709. [Google Scholar] [CrossRef]
- Bui, M.T.; Doskocil, R.; Krivanek, V. The analysis of the effect of the parameters on indirect distance measurement using a digital Camera. In Proceedings of the International Conference on Military Technologies, Brno, Czech Republic, 30–31 May 2019; pp. 1–9. [Google Scholar]
- Hsu, C.-C.; Lu, M.-C.; Chin, K.-W. Distance measurement based on pixel variation of CCD images. ISA Trans. 2009, 48, 389–395. [Google Scholar] [CrossRef] [PubMed]
- Zivkovic, Z. Improved adaptive Gaussian mixture model for background subtraction. In Proceedings of the 17th International Conference on Pattern Recognition, Cambridge, UK, 26 August 2004; pp. 28–31. [Google Scholar] [CrossRef]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).