

Robotic Button Mushroom Harvesting Systems: A Review of Design, Mechanism, and Future Directions


 , , ,
, , , 
 ,
, 
Abstract
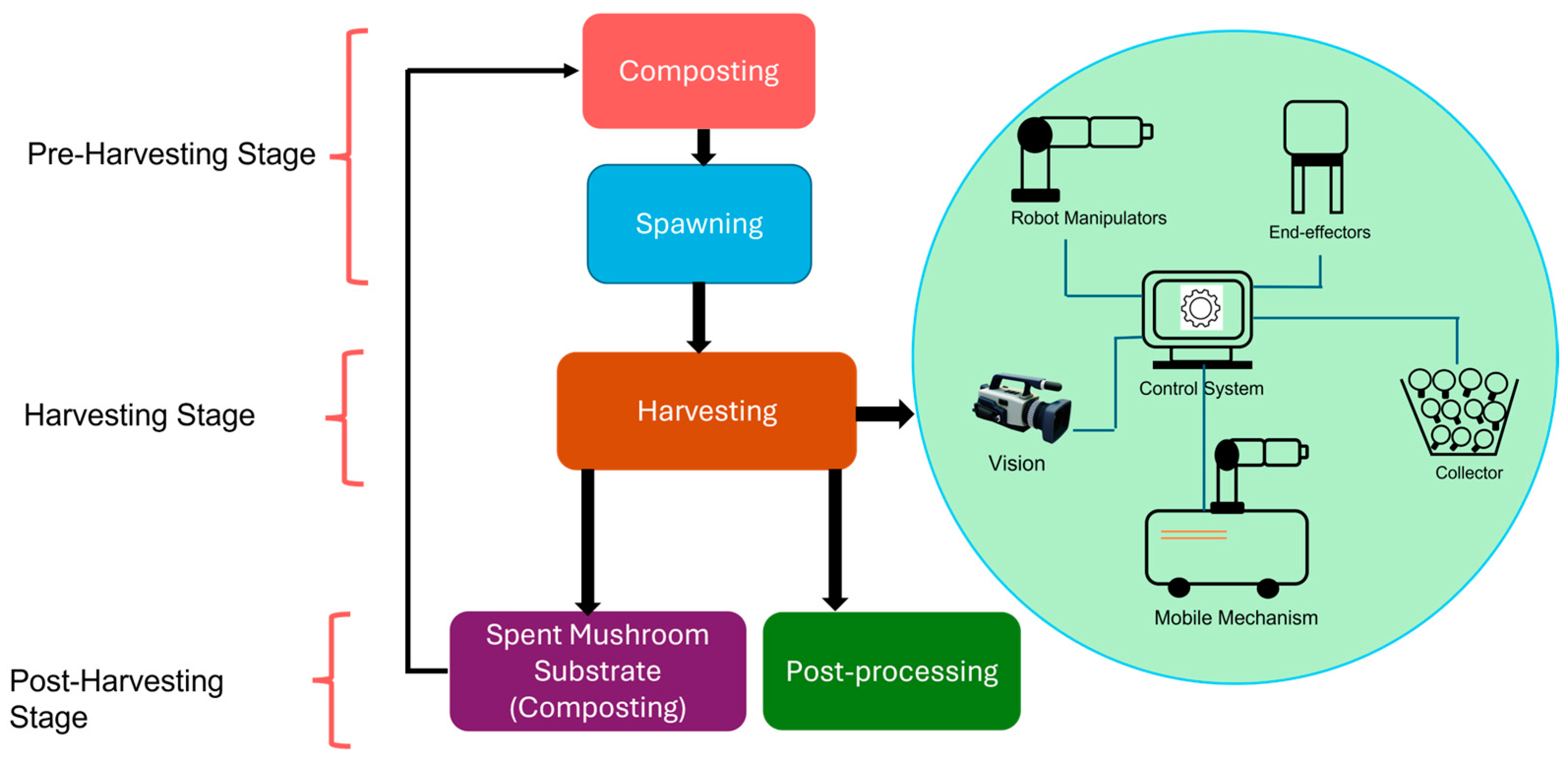
:1. Introduction
2. Methodology
3. Mechanical System
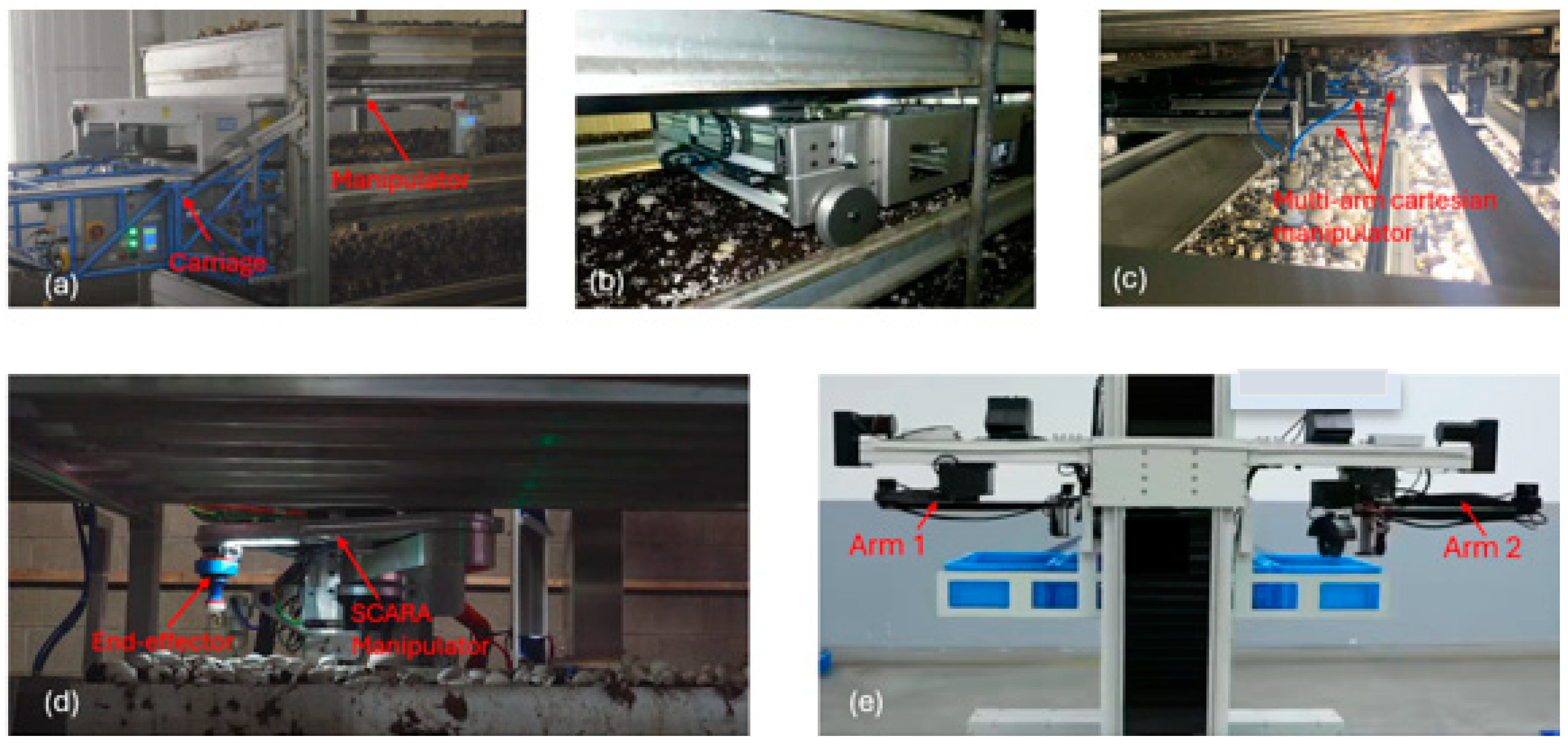
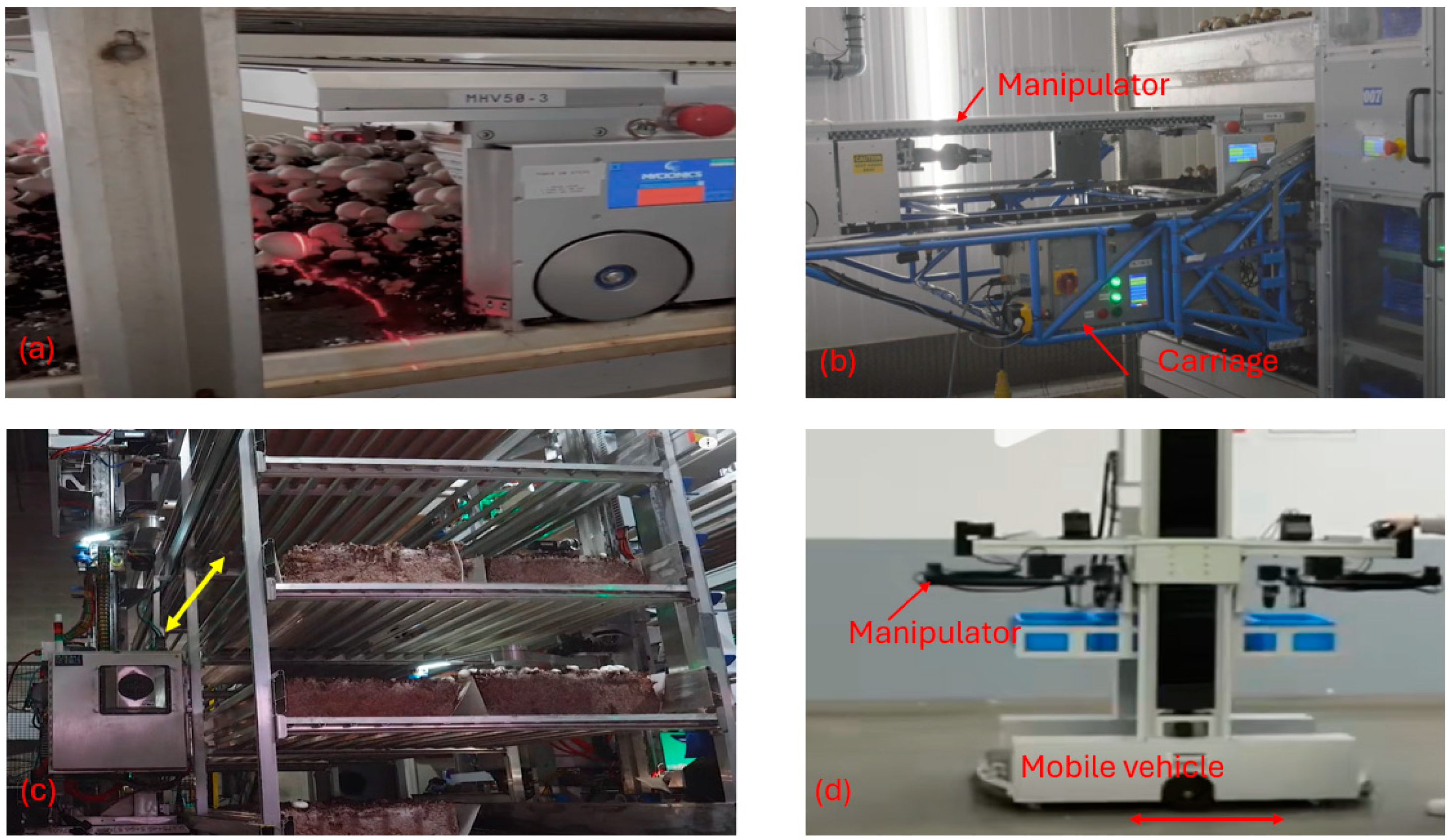
3.1. Robot Manipulators
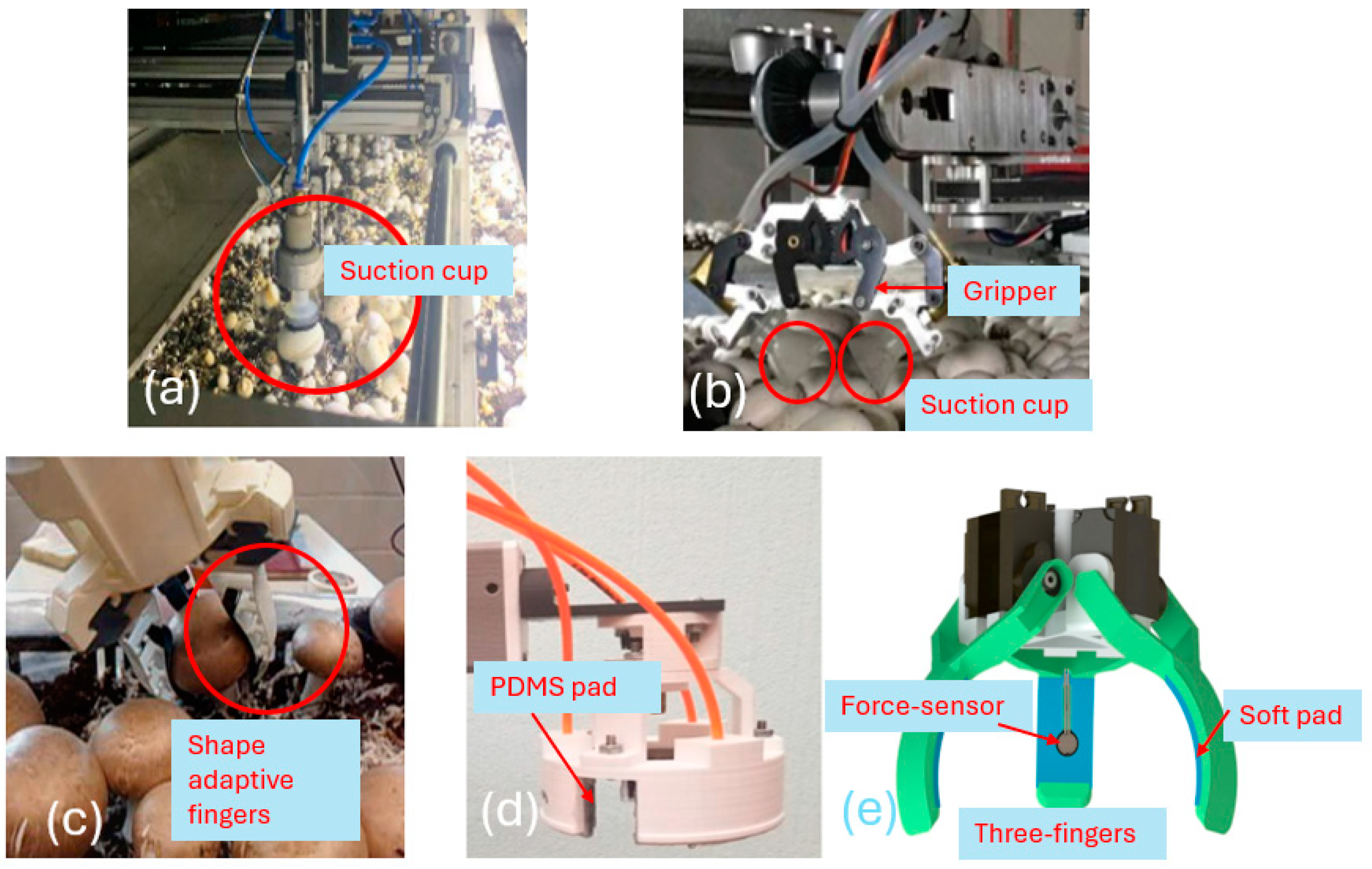
3.2. End-Effectors

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| End-Effector Type | Actuation | Picking Time [s] | Success Rate [%] | Application | References |
|---|---|---|---|---|---|
| Suction cup | Pneumatic | 1.7 | 70–100 | Commercial harvesting | [26,27,31,38,52] |
| Two-finger gripper | - | - | - | Commercial harvesting | [45] |
| Three-finger gripper | - | - | - | Commercial harvesting | [58] |
| Hybrid three-finger gripper | Electric motor | 1.2 | 64–100 | - | [3,46] |
| Closed graspers | Hyper-elastic | - | 100 | Organic objects | [59] |
| Soft three-finger gripper | Pneumatic | 3–4 | - | - | [55] |
| Conventional hand picking | Manual | 3 | ~100 | Commercial harvesting | [52] |
3.3. Collection System
3.4. Mobile Platform
3.5. Sensors
4. Computer Vision System
4.1. Two-Dimensional (2D) and Three-Dimensional (3D) Vision
4.2. Mushroom Detection and Localization
4.3. Classification and Growth Monitoring
4.4. Quality and Disease Detection
4.5. Mushroom Image Datasets
5. Discussion
6. Potential and Challenges
- Increased Productivity: Semi-automated or fully automated harvesting systems greatly reduce reliance on human labor. Reliable machines can operate for longer hours, enhancing productivity. These systems can be optimized to use the most effective picking methods based on the mushroom’s growth stage, reducing both the picking time and energy expenditure.
- Enhanced Mushroom Monitoring and Quality Control: Automated harvesters can track the entire lifecycle of mushrooms, identifying their growth stages, detecting damage and diseases, and monitoring distribution. With the help of various sensors and feedback systems, these harvesters can detect and address diseases early, preserving the quality and extending the life of the remaining mushrooms, thus improving overall production.
- Seamless Integration with Automated Production Systems: Automated harvesters can be integrated with other automation stages in the mushroom industry, including pre-harvesting and post-harvesting processes. This integration minimizes time delays between stages and enhances communication, leading to greater overall efficiency.
- Advanced Computer Vision: Enhancing computer vision through faster controllers and advanced computers can improve speed and accuracy. Utilizing 3D cameras and depth sensors can help the harvester approach mushrooms from the optimal angle, reducing injuries. Better model training and 3D mapping can also enhance detection accuracy, especially for clustered mushrooms, and shorten detection times.
- Working Environment and Space Availability: Most of the work that has been conducted so far in button mushroom harvesting is for the aluminum Dutch shelves with a specific design and arrangement. There are extant mushroom farms that use wooden shelves and other growing environments, which offer significant challenges to designing the harvesters that can be used in these environments. Modifications to the existing designs may not be feasible. Furthermore, some of the harvester components require significant space inside the shelves to be installed. Therefore, the harvesting system, which is flexible in terms of the working environment, is a critical challenge.
- Adaptability: Button mushrooms grow in different sizes and shapes. The distribution of mushrooms on the growth bed is very irregular: from sparsely distributed single-grown mushrooms to densely packed cluster mushrooms. Thus far, the works have mostly focused on single-grown mushrooms of a limited size range. The damage associated with end-effectors is higher than that of human pickers. The development of an end-effector that can adapt to any mushroom regardless of its size, shape, or distribution is very challenging at the present time.
- Maintenance and Downtime: This is one of the fields that has not been explored for mushroom harvesters. In the long run, the machine will need regular maintenance and may experience downtime due to technical issues. The reliability of the machines overtime and the loss associated with downtime are not yet studied, which could be a critical issue in the future.
- Technical complexity and efficiency: Automated harvesters include different physical and non-physical components that must be meticulously designed and operated. The machine must be able to replicate human sensitivity to avoid any damage and operate at human-level efficiency. This requires significant research progress in the design and programming of the system, which demands skilled manpower and investment. Furthermore, automated machines require high initial investments, operating costs, and energy consumption. The design of energy-efficient machines, as well as a low-cost automation solution for the parts and maintenance, great product service, etc., are some critical areas that cannot be overlooked.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sreekantha, D.K. Automation in agriculture: A study. Int. J. Eng. Sci. Invent. Res. Dev. 2016, 2, 823–833. [Google Scholar]
- Desa, U.N. World Population Prospects 2019 Highlights (ST/ESA/SER.A/423); United Nations Department for Economic and Social Affairs: New York, NY, USA, 2019. [Google Scholar]
- Koirala, B.; Kafle, A.; Nguyen, H.C.; Kang, J.; Zakeri, A.; Balan, V.; Merchant, F.; Benhaddou, D.; Zhu, W. A Hybrid Three-Finger Gripper for Automated Harvesting of Button Mushrooms. Actuators 2024, 13, 287. [Google Scholar] [CrossRef]
- Bachche, S. Deliberation on Design Strategies of Automatic Harvesting Systems: A Survey. Robotics 2015, 4, 194–222. [Google Scholar] [CrossRef]
- Croptracker. Labor Shortages in Agriculture: The Trends and Solutions. Available online: https://www.croptracker.com/blog/labor-shortages-in-agriculture-the-trends-and-solutions (accessed on 27 September 2024).
- Journal-Courier. How Labor Shortages Are Affecting Agriculture. Available online: https://www.myjournalcourier.com/news/article/modern-farmer-worker-shortage-18358374.php (accessed on 27 September 2024).
- 4AG Robotics Changing the Mushroom Harvesting Business. Available online: https://4ag.ai/mushroom-harvesting-robot/ (accessed on 28 September 2024).
- Saiful Azimi Mahmud, M.; Shukri Zainal Abidin, M.; Abiodun Emmanuel, A.; Sahib Hasan, H. Robotics and Automation in Agriculture: Present and Future Applications. Appl. Model. Simul. 2020, 4, 130–140. [Google Scholar]
- Saleem, M.H.; Potgieter, J.; Arif, K.M. Automation in Agriculture by Machine and Deep Learning Techniques: A Review of Recent Developments. Precis. Agric. 2021, 22, 2053–2091. [Google Scholar] [CrossRef]
- Evarist, N.; Deborah, N.; Birungi, G.; Nakiguli, C.; John, B. A Model for Detecting the Presence of Pesticide Residues in Edible Parts of Tomatoes, Cabbages, Carrots, and Green Pepper Vegetables. Artif. Intell. Appl. 2024, 2, 225–232. [Google Scholar] [CrossRef]
- Yin, H.; Yi, W.; Hu, D. Computer Vision and Machine Learning Applied in the Mushroom Industry: A Critical Review. Comput. Electron. Agric. 2022, 198, 107015. [Google Scholar] [CrossRef]
- Azoyan, A. Feasibility Analysis of an Automated Mushroom Harvesting System. Master’s Thesis, University of Georgia, Athens, Greece, 2004. [Google Scholar]
- El-Ramady, H.; Abdalla, N.; Badgar, K.; Llanaj, X.; Törős, G.; Hajdú, P.; Eid, Y.; Prokisch, J. Edible Mushrooms for Sustainable and Healthy Human Food: Nutritional and Medicinal Attributes. Sustainability 2022, 14, 4941. [Google Scholar] [CrossRef]
- Balan, V.; Munafo, J.P.; Pattathil, S.; Merritt, B.B.; Venketachalam, S.; Ng, W.-O. Protocols to Evaluate the Nutritional and Potential Health Benefits of Edible Mushrooms. Curr. Biotechnol. 2016, 7, 34–58. [Google Scholar] [CrossRef]
- Banerjee, D.K.; Das, A.K.; Banerjee, R.; Pateiro, M.; Nanda, P.K.; Gadekar, Y.P.; Biswas, S.; McClements, D.J.; Lorenzo, J.M. Application of Enoki Mushroom (Flammulina velutipes) Stem Wastes as Functional Ingredients in Goat Meat Nuggets. Foods 2020, 9, 432. [Google Scholar] [CrossRef]
- Ibrahim, S.; Huda-Faujan, H.S. Potential Use of Underutilised Mushroom Stems in Meat Products and Meat Analogues: A Mini Review. Malays. J. Sci. Health Technol. 2023, 9, 147–152. [Google Scholar] [CrossRef]
- Bhushan, A.; Kulshreshtha, M. The Medicinal Mushroom Agaricus bisporus: Review of Phytopharmacology and Potential Role in the Treatment of Various Diseases. J. Nat. Sci. Med. 2018, 1, 4–9. [Google Scholar]
- Dawood, M.A.O.; Eweedah, N.M.; El-Sharawy, M.E.; Awad, S.S.; Van Doan, H.; Paray, B.A. Dietary White Button Mushroom Improved the Growth, Immunity, Antioxidative Status and Resistance against Heat Stress in Nile Tilapia (Oreochromis niloticus). Aquaculture 2020, 523, 735229. [Google Scholar] [CrossRef]
- Park, H.J. Current Uses of Mushrooms in Cancer Treatment and Their Anticancer Mechanisms. Int. J. Mol. Sci. 2022, 23, 10502. [Google Scholar] [CrossRef]
- Wang, X.; Ha, D.; Mori, H.; Chen, S. White Button Mushroom (Agaricus bisporus) Disrupts Androgen Receptor Signaling in Human Prostate Cancer Cells and Patient-Derived Xenograft. J. Nutr. Biochem. 2021, 89, 108580. [Google Scholar] [CrossRef]
- Grand View Research. Mushroom Market Size, Share & Trends Analysis Report by Product (Button, Shiitake, Oyster), by Form, by Distribution Channel, by Application (Food, Pharmaceuticals, Cosmetics), by Region, and Segment Forecasts, 2022–2030. Available online: https://www.grandviewresearch.com/industry-analysis/mushroom-market# (accessed on 8 October 2024).
- Zhang, M.Z.; Xu, J.P.; Callac, P.; Chen, M.Y.; Wu, Q.; Wach, M.; Mata, G.; Zhao, R.L. Insight into the Evolutionary and Domesticated History of the Most Widely Cultivated Mushroom Agaricus bisporus via Mitogenome Sequences of 361 Global Strains. BMC Genom. 2023, 24, 182. [Google Scholar] [CrossRef]
- Global Market Insights. White Mushroom Market Size. Available online: https://www.gminsights.com/industry-analysis/white-mushroom-market (accessed on 12 June 2024).
- Balan, V.; Zhu, W.; Krishnamoorthy, H.; Benhaddou, D.; Mowrer, J.; Husain, H.; Eskandari, A. Challenges and Opportunities in Producing High-Quality Edible Mushrooms from Lignocellulosic Biomass in a Small Scale. Appl. Microbiol. Biotechnol. 2022, 106, 1355–1374. [Google Scholar] [CrossRef] [PubMed]
- Zied, D.C.; Pardo-Gimenez, A. Edible and Medicinal Mushrooms; Wiley Blackwell: Hoboken, NJ, USA, 2017. [Google Scholar]
- Reed, J.N.; Tillett, R.D. Initial Experiments in Robotic Mushroom Harvesting. Mechatronics 1994, 4, 265–279. [Google Scholar] [CrossRef]
- Reed, J.N.; Miles, S.J.; Butler, J.; Baldwin, M.; Noble, R. Automatic Mushroom Harvester Development. J. Agric. Eng. Res. 2001, 78, 15–23. [Google Scholar] [CrossRef]
- Noble, R.; Reed, J.N.; Miles, S.; Jackson, A.F.; Butler, J. Influence of Mushroom Strains and Population Density on the Performance of a Robotic Harvester. J. Agric. Eng. Res. 1997, 68, 215–222. [Google Scholar] [CrossRef]
- Tillett, R.D.; Batchelor, B.G. An Algorithm for Locating Mushrooms in a Growing Bed. Comput. Electron. Agric. 1991, 6, 191–200. [Google Scholar] [CrossRef]
- Kuchinskiy, N.A. Development of an Autonomous Robotic Mushroom Harvester. Master’s Thesis, The University of Western Ontario, London, ON, Canada, 2016. [Google Scholar]
- Zhao, K.; Li, H.; Ji, J.; Li, Q.; Li, M.; He, Y.; Li, J.; Xing, S. Pressure-Stabilized Flexible End-Effector for Selective Picking of Agaricus bisporus. Agriculture 2023, 13, 2256. [Google Scholar] [CrossRef]
- Ghahraei, O.; Kheshtzarrin, M.; Saghafinia, A. Development of a Button Mushroom Harvesting Robot Using Expert System and Image Processing in Shelf Cultivation Method. Majlesi J. Electr. Eng. 2023, 17, 53–61. [Google Scholar] [CrossRef]
- Mavridis, P.; Mavrikis, N.; Mastrogeorgiou, A.; Chatzakos, P. Low-Cost, Accurate Robotic Harvesting System for Existing Mushroom Farms. In Proceedings of the 2023 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Seattle, WA, USA, 28–30 June 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023; pp. 144–149. [Google Scholar]
- Mycionics Inc. System and Method for Autonomous Harvesting of Mushrooms. U.S. Patent No. 11,154,010, 26 October 2021. [Google Scholar]
- Champi-On Fully Automatic System for Picking and Handling Mushrooms for the Fresh Market: From the Growing Bed to the Cooling Storage. Available online: https://cordis.europa.eu/project/id/262037/reporting (accessed on 19 August 2024).
- Jia, B.; Yang, S.; Yu, T. Research on Three Picking Arm Avoidance Algorithms for Agaricus Mushroom Picking Robot. In Proceedings of the 2020 IEEE International Conference on Advances in Electrical Engineering and Computer Applications (AEECA), Dalian, China, 25–27 August 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020; pp. 325–328. [Google Scholar]
- Hu, X.; Pan, Z.; Lv, S. Picking Path Optimization of Agaricus bisporus Picking Robot. Math. Probl. Eng. 2019, 2019, 8973153. [Google Scholar] [CrossRef]
- Yang, S.; Ji, J.; Cai, H.; Chen, H. Modeling and Force Analysis of a Harvesting Robot for Button mushrooms. IEEE Access 2022, 10, 78519–78526. [Google Scholar] [CrossRef]
- Huang, M.; Jiang, X.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Development of a Robotic Harvesting Mechanism for Button mushrooms. Trans. ASABE 2021, 64, 565–575. [Google Scholar] [CrossRef]
- Mycionics Inc. Revolutionize Your Mushroom Farm Using Robotic Harvesting. Available online: https://www.youtube.com/watch?v=npGkqo-wewQ (accessed on 26 August 2024).
- Tabatabaei, S. Dorna for Picking Mushrooms. Available online: https://dorna.ai/case-study/dorna-for-picking-mushrooms/ (accessed on 27 September 2024).
- van Delden, B. Agri-Technology Investment Opportunity in the Mushroom Industry; Hort Innovation: Sydney, Australia, 2020. [Google Scholar]
- British Columbia, Agritech: TechBrew Robotics. Available online: https://www.youtube.com/watch?v=f4d0Q4u0Z9U (accessed on 19 August 2024).
- Boudreau, M.H.; Findlater, K.A.L.; Gibson, J.B.; Richardson, C.A. Automated Mushroom Harvesting System. U.S. Patent 20240155985A1, 2 February 2024. [Google Scholar]
- The Last Mile of Mushroom Automated Production: Picking. Available online: https://new.qq.com/rain/a/20230418V05NPA00 (accessed on 19 August 2024).
- Recchia, A.; Strelkova, D.; Urbanic, J.; Kim, E.; Anwar, A.; Murugan, A.S. A Prototype Pick and Place Solution for Harvesting White Button Mushrooms Using a Collaborative Robot. Robot. Rep. 2023, 1, 67–81. [Google Scholar] [CrossRef]
- Recchia, A. Development of a High-Level Discrete Event Simulation Model for the Harvesting of White Button Mushrooms with Human-Robot Collaboration (HRC). Master’s Thesis, University of Windsor, Windsor, ON, Canada, 2024. [Google Scholar]
- Mohanan, M.G.; Salgaonkar, A. Robotic Mushroom Harvesting by Employing Probabilistic Road Map and Inverse Kinematics. BOHR Int. J. Future Robot. Artif. Intell. 2021, 1, 1–10. [Google Scholar] [CrossRef]
- Rowley, J.H. Developing Flexible Automation for Mushroom Harvesting (Agaricus bisporus). Ph.D. Thesis, The University of Warwick, Coventry, UK, 2009. [Google Scholar]
- Dai, Y.; Xiang, C.; Qu, W.; Zhang, Q. A Review of End-Effector Research Based on Compliance Control. Machines 2022, 10, 100. [Google Scholar] [CrossRef]
- Zhong, M.; Han, R.; Liu, Y.; Huang, B.; Chai, X.; Liu, Y. Development, Integration, and Field Evaluation of an Autonomous Agaricus bisporus Picking Robot. Comput. Electron. Agric. 2024, 220, 108871. [Google Scholar] [CrossRef]
- Huang, M.; He, L.; Choi, D.; Pecchia, J.; Li, Y. Picking Dynamic Analysis for Robotic Harvesting of Agaricus bisporus Mushrooms. Comput. Electron. Agric. 2021, 185, 106145. [Google Scholar] [CrossRef]
- Fantoni, G.; Santochi, M.; Dini, G.; Tracht, K.; Scholz-Reiter, B.; Fleischer, J.; Kristoffer Lien, T.; Seliger, G.; Reinhart, G.; Franke, J.; et al. Grasping Devices and Methods in Automated Production Processes. CIRP Ann. Manuf. Technol. 2014, 63, 679–701. [Google Scholar] [CrossRef]
- Rajendran, V.; Debnath, B.; Mghames, S.; Mandil, W.; Parsa, S.; Parsons, S.; Amir, G.-E. Towards Autonomous Selective Harvesting: A Review of Robot Perception, Robot Design, Motion Planning and Control. J. Field Robot. 2023, 41, 2247–2279. [Google Scholar] [CrossRef]
- Mbakop, S.; Tagne, G.; Lagache, A.; Youcef-Toumi, K.; Merzouki, R. Integrated Design of a Bio-Inspired Soft Gripper for Mushrooms Harvesting. In Proceedings of the 2023 IEEE International Conference on Soft Robotics (RoboSoft), Singapore, 3–7 April 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023. [Google Scholar]
- Qiu, Z.; Paul, H.; Wang, Z.; Hirai, S.; Kawamura, S. An Evaluation System of Robotic End-Effectors for Food Handling. Foods 2023, 12, 4062. [Google Scholar] [CrossRef] [PubMed]
- Keri Ferguson. Robotics Researcher Revolutionizes Mushroom Harvesting. Available online: https://news.westernu.ca/2022/02/western-roboctics-researcher-revolutionizes-mushroom-harvester/ (accessed on 26 August 2024).
- Mycionics Robotics: The Future of Mushroom Harvesting|30+ Picks Per Minute! Available online: https://www.youtube.com/watch?v=VZI5BV9quk4 (accessed on 19 August 2024).
- Galley, A.; Knopf, G.K.; Kashkoush, M. Pneumatic Hyperelastic Actuators for Grasping Curved Organic Objects. Actuators 2019, 8, 76. [Google Scholar] [CrossRef]
- Tao, K.; Wang, Z.; Yuan, J.; Liu, X. Design of a Novel End-Effector for Robotic Bud Thinning of Agaricus bisporus Mushrooms. Comput. Electron. Agric. 2023, 210, 107880. [Google Scholar] [CrossRef]
- Wang, F.; Zheng, J.; Tian, X.; Wang, J.; Niu, L.; Feng, W. An Automatic Sorting System for Fresh White Button Mushrooms Based on Image Processing. Comput. Electron. Agric. 2018, 151, 416–425. [Google Scholar] [CrossRef]
- Xiong, Y.; Peng, C.; Grimstad, L.; From, P.J.; Isler, V. Development and Field Evaluation of a Strawberry Harvesting Robot with a Cable-Driven Gripper. Comput. Electron. Agric. 2019, 157, 392–402. [Google Scholar] [CrossRef]
- Feng, Q.; Zou, W.; Fan, P.; Zhang, C.; Wang, X. Design and Test of Robotic Harvesting System for Cherry Tomato. Int. J. Agric. Biol. Eng. 2018, 11, 96–100. [Google Scholar] [CrossRef]
- Zhao, Y.; Gong, L.; Liu, C.; Huang, Y. Dual-Arm Robot Design and Testing for Harvesting Tomato in Greenhouse. In IFAC-PapersOnLine; Elsevier B.V.: Amsterdam, The Netherlands, 2016; Volume 49, pp. 161–165. [Google Scholar]
- Porichis, A.; Vasios, K.; Iglezou, M.; Mohan, V.; Chatzakos, P. Visual Imitation Learning for Robotic Fresh Mushroom Harvesting. In Proceedings of the 2023 31st Mediterranean Conference on Control and Automation (MED), Limassol, Cyprus, 26–29 June 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023; pp. 535–540. [Google Scholar]
- Zhu, X.; Zhu, K.; Liu, P.; Zhang, Y.; Jiang, H. A Special Robot for Precise Grading and Metering of Mushrooms Based on Yolov5. Appl. Sci. 2023, 13, 10104. [Google Scholar] [CrossRef]
- Subedi, A.; Luitel, A.; Baskota, M.; Acharya, T.D. IoT Based Monitoring System for White Button Mushroom Farming. Proceedings 2020, 42, 46. [Google Scholar]
- Gaohang, Y.; Yun, Z.; Ge, L. Algorithm for Locating Individual Mushroom and Description of Its Contour Using Machine Vision. Trans. CSAE 2005, 21, 101–104. [Google Scholar]
- Gaohang, Y.; Jianmin, L.; Yun, Z. Region Marking Technique Based on Sequential Scan and Segmentation Method of Mushroom Images. Trans. CSAE 2006, 22, 139–142. [Google Scholar]
- Yong-Qiang, Y.; Ming, Y.; Yong-Hua, L.; Shou-Gang, R. Localization Algorithm Based on Corner Density Detection for Overlapping Mushroom Image. Comput. Syst. Appl. 2018, 27, 119–125. [Google Scholar] [CrossRef]
- Yang, S.; Ni, B.; Du, W.; Yu, T. Research on an Improved Segmentation Recognition Algorithm of Overlapping Agaricus bisporus. Sensors 2022, 22, 3946. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Wang, F.; Cai, Y.; Yi, S.; Zhang, B. An Improved YOLOv5s-Based Agaricus bisporus Detection Algorithm. Agronomy 2023, 13, 1871. [Google Scholar] [CrossRef]
- Retsinas, G.; Efthymiou, N.; Anagnostopoulou, D.; Maragos, P. Mushroom Detection and Three Dimensional Pose Estimation from Multi-View Point Clouds. Sensors 2023, 23, 3576. [Google Scholar] [CrossRef]
- Baisa, N.L.; Al-Diri, B. Mushrooms Detection, Localization and 3D Pose Estimation Using RGB-D Sensor for Robotic-Picking Applications. arXiv 2022, arXiv:2201.02837. [Google Scholar]
- Lin, A.; Liu, Y.; Zhang, L. Mushroom Detection and Positioning Method Based on Neural Network. In Proceedings of the IEEE Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; pp. 1174–1178. [Google Scholar]
- Wei, B.; Zhang, Y.; Pu, Y.; Sun, Y.; Zhang, S.; Lin, H.; Zeng, C.; Zhao, Y.; Wang, K.; Chen, Z. Recursive-YOLOv5 Network for Edible Mushroom Detection in Scenes with Vertical Stick Placement. IEEE Access 2022, 10, 40093–40108. [Google Scholar] [CrossRef]
- Olpin, A.J.; Dara, R.; Stacey, D.; Kashkoush, M. Region-Based Convolutional Networks for End-to-End Detection of Agricultural Mushrooms. In Proceedings of the Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics), Cherbourg, France, 2–4 July 2018; Springer Verlag: Berlin/Heidelberg, Germany, 2018; Volume 10884 LNCS, pp. 319–328. [Google Scholar]
- Heinemann, P.H.; Hughes, R.; Morrow, C.T.; Sommer, H.J.; Beelman, R.B.; Wuest, P.J. Grading of mushrooms using a machine vision system. Trans. ASAE 1994, 37, 1671–1677. [Google Scholar] [CrossRef]
- Wang, F.; Zheng, J.; Wang, L.; Feng, W.; Niu, L. Classification Method Research of Fresh Agaricus bisporus Based on Image Processing. In Proceedings of the Computer and Computing Technologies in Agriculture XI: 11th IFIP WG 5.14 International Conference, CCTA 2017, Jilin, China, 12–15 August 2017; pp. 333–340. [Google Scholar] [CrossRef]
- Lu, C.P.; Liaw, J.J.; Wu, T.C.; Hung, T.F. Development of a Mushroom Growth Measurement System Applying Deep Learning for Image Recognition. Agronomy 2019, 9, 32. [Google Scholar] [CrossRef]
- Lu, C.P.; Liaw, J.J. A Novel Image Measurement Algorithm for Common Mushroom Caps Based on Convolutional Neural Network. Comput. Electron. Agric. 2020, 171, 105336. [Google Scholar] [CrossRef]
- Lee, C.H.; Choi, D.; Pecchia, J.; He, L.; Heinemann, P. Development of a Mushroom Harvesting Assistance System Using Computer Vision. In Proceedings of the 2019 ASABE Annual International Meeting; American Society of Agricultural and Biological Engineers, Boston, MA, USA, 7–10 July 2019. [Google Scholar]
- Vízhányó, T.; Felföldi, J. Enhancing Colour Differences in Images of Diseased Mushrooms. Comput. Electron. Agric. 2000, 26, 187–198. [Google Scholar] [CrossRef]
- Nadim, M.; Ahmadifar, H.; Mashkinmojeh, M.; Yamaghani, M.R. Application of Image Processing Techniques for Quality Control of Mushroom. Casp. J. Health Res. 2019, 4, 72–75. [Google Scholar] [CrossRef]
- Arjun, A.D.; Chakraborty, S.K.; Mahanti, N.K.; Kotwaliwale, N. Non-Destructive Assessment of Quality Parameters of White Button Mushrooms (Agaricus bisporus) Using Image Processing Techniques. J. Food Sci. Technol. 2022, 59, 2047–2059. [Google Scholar] [CrossRef]
- Jacob, P.M.; Moni, J.; Sunil, S.; Johnson, A.; Mathews, J.M.; Akshaya, M. An Intelligent System for Cultivation and Classification of Mushrooms Using Machine Vision. In Proceedings of the International Conference on Computational Intelligence and Sustainable Engineering Solution, CISES 2023, Greater Noida, India, 28–30 April 2023; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2023; pp. 264–270. [Google Scholar]
- Concha-Meyer, A.; Eifert, J.; Wang, H.; Sanglay, G. Volume Estimation of Strawberries, Mushrooms, and Tomatoes with a Machine Vision System. Int. J. Food Prop. 2018, 21, 1867–1874. [Google Scholar] [CrossRef]
- Lee, C.-H. Development of a Mushroom Harvesting Assistance System Using Computer Vision. Master’s Thesis, The Pennsylvania State University, University Park, PA, USA, 2020. [Google Scholar]
- Zakeri, A.; Fawakherji, M.; Kang, J.; Koirala, B.; Balan, V.; Zhu, W.; Benhaddou, D.; Merchant, F.A. M18K: A Comprehensive RGB-D Dataset and Benchmark for Mushroom Detection and Instance Segmentation. arXiv 2024, arXiv:2407.11275. [Google Scholar]
- Jareanpon, C.; Khummanee, S.; Sriputta, P.; Scully, P. Developing an Intelligent Farm System to Automate Real-Time Detection of Fungal Diseases in Mushrooms. Curr. Appl. Sci. Technol. 2024, 24, e0255708. [Google Scholar] [CrossRef]
- Moysiadis, V.; Kokkonis, G.; Bibi, S.; Moscholios, I.; Maropoulos, N.; Sarigiannidis, P. Monitoring Mushroom Growth with Machine Learning. Agriculture 2023, 13, 223. [Google Scholar] [CrossRef]
- Benhaddou, D.; Balan, V.; La Garza, A.D.; Merchant, F.A. Estimating Mushroom Yield and Quality Using Computer Vision. In Proceedings of the International Wireless Communications and Mobile Computing, IWCMC 2023, Marrakesh, Morocco, 19–23 June 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 562–567. [Google Scholar]
- Anagnostopoulou, D.; Retsinas, G.; Efthymiou, N.; Filntisis, P.; Maragos, P. A Realistic Synthetic Mushroom Scenes Dataset. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) Workshops 2023, Vancouver, BC, Canada, 18–22 June 2023; pp. 6282–6289. [Google Scholar]
- Cao, J. White Button Mushroom RGB-D Images. Mendeley Data 2020. [Google Scholar] [CrossRef]


| Application (Measurement) | Sensors | References |
|---|---|---|
| Gripping force, load, picking parameters | FSRs, load | [3,30,38,39,46,51,52,55,60,65] |
| Suction pressure | Pressure | [38,39,51,52,64] |
| Distance, displacement | Distance, electromagnetic | [51,59] |
| Bending | Bending | [55] |
| Strain changes | Strain-resistance gauge | [66] |
| Angle | Inclination, attitude angle | [39,52,60] |
| Temperature, humidity | DHT | [67] |
| Object detection | LIDAR, camera | [11,66] |
| Grading and quality | camera | [11] |
| Application | Camera/Sensor | Algorithm/Method | Tasks | Results | References |
|---|---|---|---|---|---|
| Identification | Video camera | Morphological target detection and image processing | Identifying and locating mushrooms inside harvester rig | 86% identified | [29] |
| Monochromatic camera (MC) | Image processing and morphological target detection | Detecting and locating mushrooms inside the harvester | 84% located, 67% picked | [26] | |
| 76% picked | [28] | ||||
| MC with a zoom lens | 81.6% picked | [26] | |||
| Monochromatic camera | Image processing algorithm with centroid method | Locate mushrooms in a growing field | Effective | [68,69] | |
| Harris corner detection with an iterative algorithm combined with a watershed algorithm | Background suppression, center detection for identification | 86.3% located | [70] | ||
| Image processing using edge detection, convex hull extraction, and Harris corner detection | Segmenting and identifying overlapping mushrooms | 96% recognition accuracy | [71] | ||
| Improved YOLOv5s model with CBAM module and Mosaic image augmentation | Detection of Agaricus bisporus in complex environment | 98.8% detection accuracy | [72] | ||
| RGB-D | Template-based approach with 3D meshes or point clouds, density clustering, and modified ICP algorithm | Detection and 3D pose estimation | Very effective | [73] | |
| RGB-D | Greyscale conversion, active contour, and circular Hough transform | Detection, localization, and 3D pose estimation | Effective in lab and farm settings | [74] | |
| Improved YOLOv2 algorithm with ResNet50 | Detecting and positioning mushrooms | 33.9 frames/s detection rate; high accuracy | [75] | ||
| Recursive-YOLOv5, ASPP, improved IOU metrics | Identifying edible mushrooms | 98% accuracy | [76] | ||
| Region-based convolutional networks with LoG algorithm | Detection | 92.142% detection rate | [77] | ||
| Classification and growth | Monochromatic | Image analysis based on color, shape, stem cut, and cap veil opening | Mushroom classification and quality | [78] | |
| Image processing algorithm | Classification based on pileus diameter | [79] | |||
| IP67 Network camera | Novel image detection algorithm using YOLOv3 and SP algorithm | Measuring mushroom cap size and growth rate | Better accuracy than CHT | [80,81] | |
| Kinect RGB-D | Image processing and machine learning | Monitoring growth stages | 70.93% accuracy | [82] | |
| Quality Assessment | Color video camera | Vectorial normalization method | Disease detection based on discoloration | 81% of diseases classified | [83] |
| Digital webcam | Image processing with artificial neural network and fuzzy logic | Assess mushroom quality based on color, area, weight, and volume | Detection rate 95.6% | [84] | |
| Optical zooming digital camera | L-a-b color model and hyperspectral imaging | Distinguish damaged and undamaged mushroom based on color and browning | Highly accurate | [85] | |
| Android camera | MobileNetv2 | Distinguish poisonous and edible mushrooms | 72% confidence rate | [86] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Koirala, B.; Zakeri, A.; Kang, J.; Kafle, A.; Balan, V.; Merchant, F.A.; Benhaddou, D.; Zhu, W. Robotic Button Mushroom Harvesting Systems: A Review of Design, Mechanism, and Future Directions. Appl. Sci. 2024, 14, 9229. https://doi.org/10.3390/app14209229
Koirala B, Zakeri A, Kang J, Kafle A, Balan V, Merchant FA, Benhaddou D, Zhu W. Robotic Button Mushroom Harvesting Systems: A Review of Design, Mechanism, and Future Directions. Applied Sciences. 2024; 14(20):9229. https://doi.org/10.3390/app14209229
Chicago/Turabian StyleKoirala, Bikram, Abdollah Zakeri, Jiming Kang, Abishek Kafle, Venkatesh Balan, Fatima A. Merchant, Driss Benhaddou, and Weihang Zhu. 2024. "Robotic Button Mushroom Harvesting Systems: A Review of Design, Mechanism, and Future Directions" Applied Sciences 14, no. 20: 9229. https://doi.org/10.3390/app14209229
APA StyleKoirala, B., Zakeri, A., Kang, J., Kafle, A., Balan, V., Merchant, F. A., Benhaddou, D., & Zhu, W. (2024). Robotic Button Mushroom Harvesting Systems: A Review of Design, Mechanism, and Future Directions. Applied Sciences, 14(20), 9229. https://doi.org/10.3390/app14209229