



Fuel Efficiency Optimization in Adaptive Cruise Control: A Comparative Study of Model Predictive Control-Based Approaches



Abstract
:1. Introduction
1.1. Background
1.2. Motivation
1.3. Contributions
- one with a strictly quadratic cost and indirect minimization of fuel consumption;
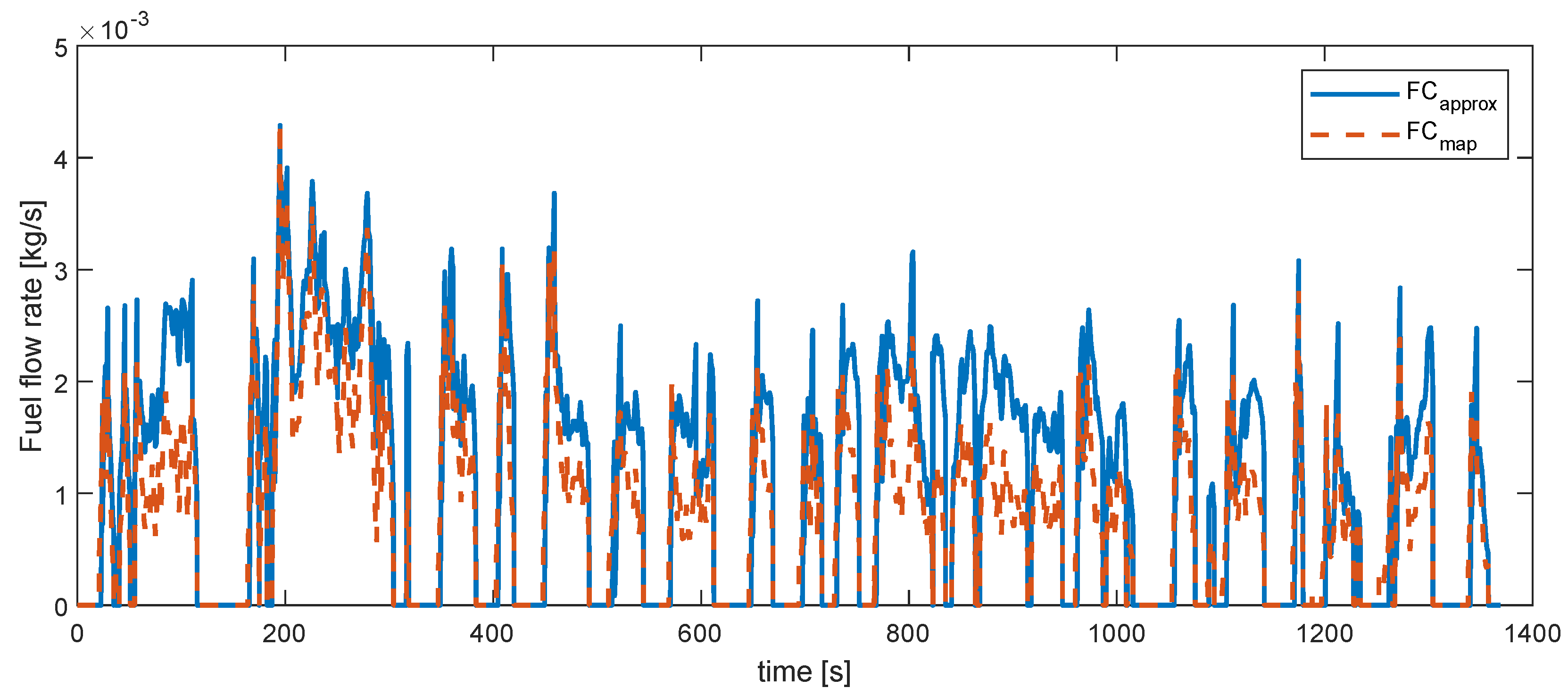
- a second one that explicitly includes a fuel consumption map in the MPC cost function.
2. Methods
2.1. Simulation Model
- is the equivalent translating mass of the vehicle, considering both translating and rotating components;
- a and v are the vehicle’s acceleration and speed;
- is the torque at the wheels;
- are the rolling resistance coefficients;
- is the wheel radius;
- and are the transmission’s gear ratio and efficiency, respectively;
- is the road slope.
2.2. Control-Oriented Model
2.3. Spacing Policy
2.4. Dynamic Programming
- is the optimal cost-to-go from state ;
- is the immediate cost incurred by applying control at state ;
- is the state at the next time step resulting from control .
2.5. Model Predictive Control
2.5.1. MPC Algorithm and Implementation
- Prediction model: Use the vehicle model to predict future states over the prediction horizon based on the current state and control inputs.
- Optimization: Solve an optimization problem to find the control inputs that minimize the cost function, subject to constraints.
- Implementation: Apply the first control input from the optimized sequence.
- Update: Update the model with new state measurements and repeat the process.
2.5.2. Cost Function with Explicit Fuel Economy Objective
2.5.3. Cost Function with Implicit Fuel Economy Objective
3. Simulation Setup
3.1. Driving Scenarios
- Urban driving: Frequent stops and starts, lower speeds, and varying traffic conditions.
- Highway driving: Higher speeds, fewer stops, and steady traffic flow.
- Mixed driving: A combination of urban and highway conditions.
3.2. Performance Metrics
- Fuel consumption: Total fuel consumption over the driving cycle.
- Fuel consumption savings: Fuel percentage savings compared to the fuel consumption arising from the optimal acceleration profile of the driving cycle.
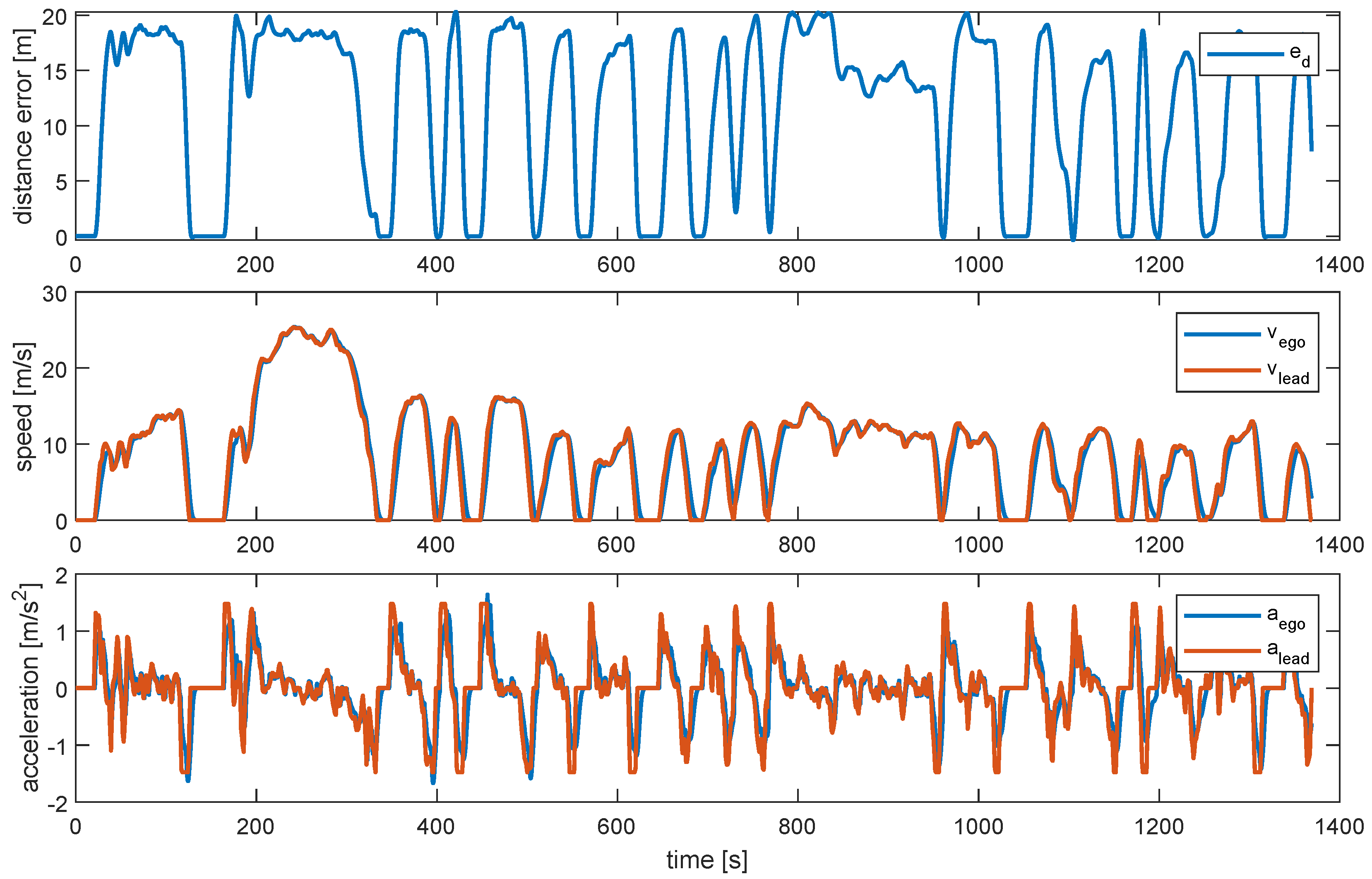
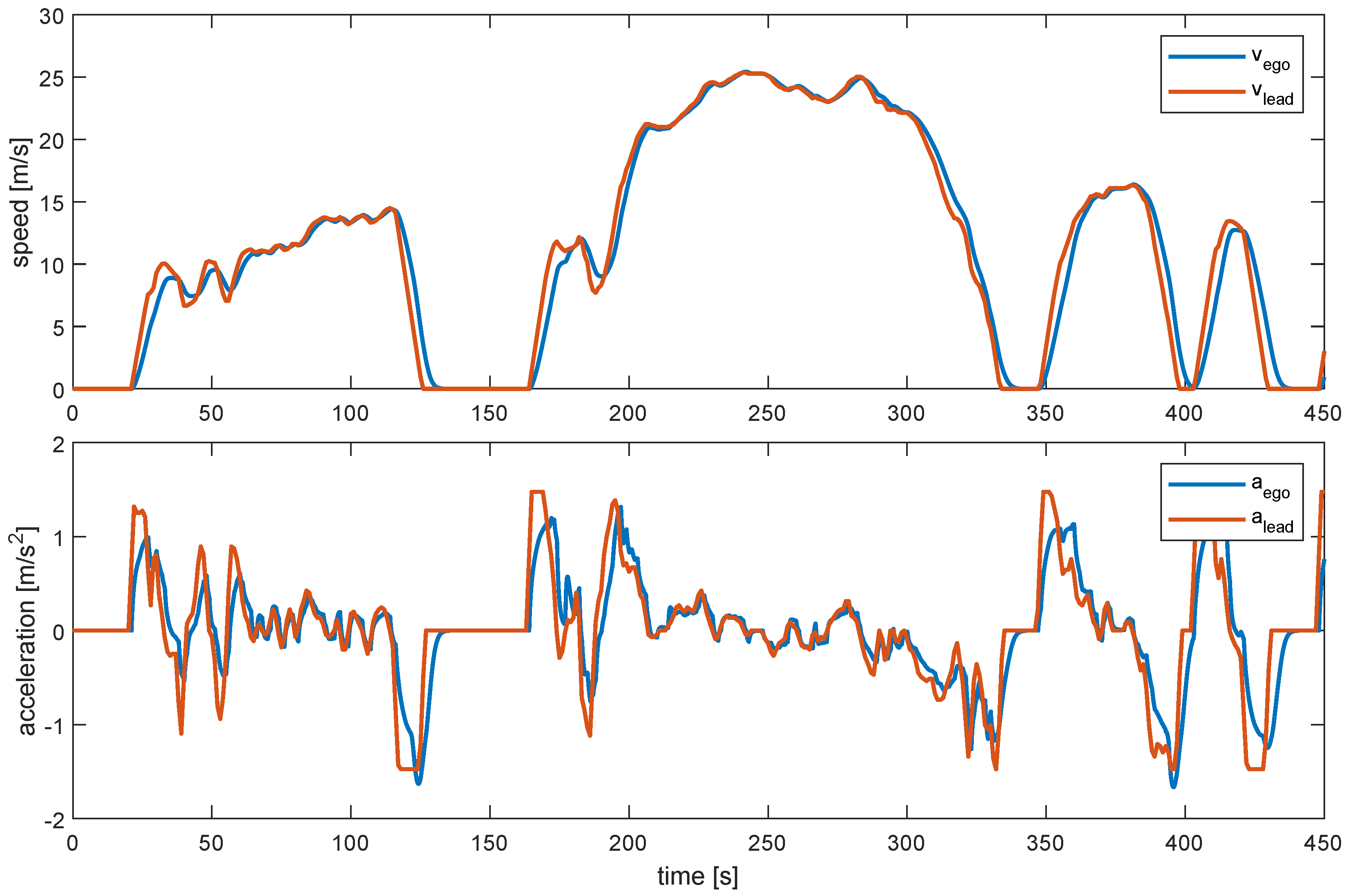
- Tracking: Deviation from the desired following distance and reference speed.
- Acceleration smoothness: Variability in acceleration, reflecting passenger comfort.
3.3. Test Cycles
- UDDS: represents city driving conditions and is used for light-duty vehicles, also including stop-and-go simulations;
- ARDC: represents rural driving conditions, reaching higher speeds than 100 km/h;
- AUDC: represents urban conditions;
- RD1: represents urban conditions;
- RD2: represents urban conditions.
4. Results and Discussion
4.1. Fuel Consumption
- The performance difference between the two MPC controllers is minimal, with a maximum variation of 0.5%, indicating highly comparable results;
- Both MPC controllers and DP show higher beneficial impacts in urban areas and driving cycles characterized by lower average speeds and higher-acceleration RMS, reflecting the efficiency of the control strategies in more dynamic driving conditions.
4.2. Tracking and Passenger Comfort
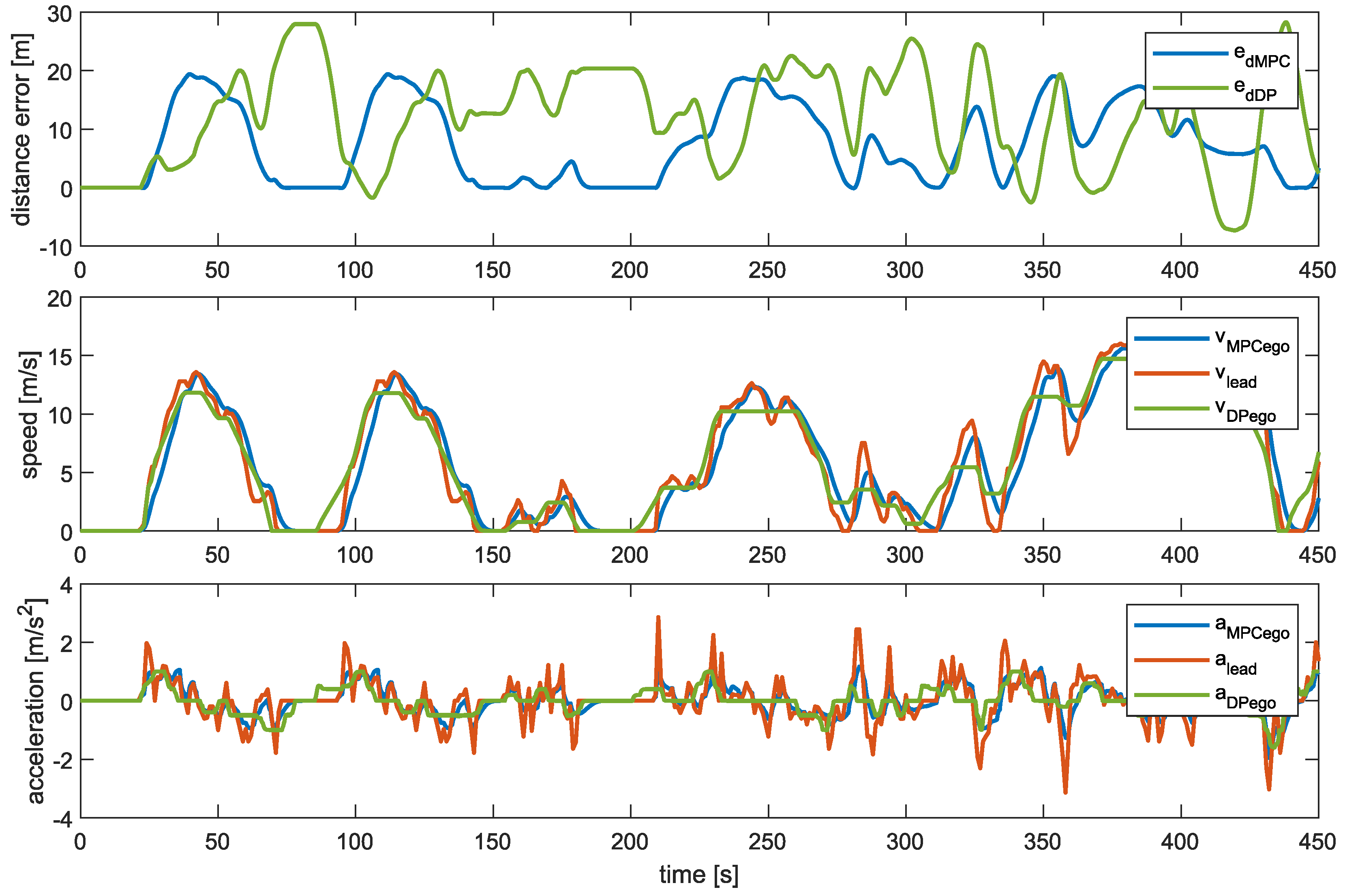
4.3. Distance Error
5. Conclusions
- One strategy explicitly incorporates a fuel consumption term;
- The other indirectly addresses fuel efficiency by focusing on acceleration smoothing.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brown, A.; Gonder, J.; Repac, B. An Analysis of Possible Energy Impacts of Automated Vehicles. In Road Vehicle Automation; Lecture Notes in Mobility; Springer International Publishing: Cham, Switzerland, 2014; pp. 137–153. [Google Scholar] [CrossRef]
- Vahidi, A.; Sciarretta, A. Energy saving potentials of connected and automated vehicles. Transp. Res. Part C Emerg. Technol. 2018, 95, 822–843. [Google Scholar] [CrossRef]
- Benmimoun, M.; Pütz, A.; Zlocki, A.; Eckstein, L. euroFOT: Field Operational Test and Impact Assessment of Advanced Driver Assistance Systems: Final Results. In Proceedings of the FISITA 2012 World Automotive Congress; Springer: Berlin/Heidelberg, Germany, 2012; pp. 537–547. [Google Scholar] [CrossRef]
- Zlocki, A.; Themann, P. Methodology for quantification of fuel reduction potential for adaptive cruise control relevant driving strategies. IET Intell. Transp. Syst. 2014, 8, 68–75. [Google Scholar] [CrossRef]
- Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Churchill, M.; Hamilton, N.; Haulcy, R.; Pohlmann, H.; Wu, F.; et al. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef]
- IEA (Ed.) Global EV Outlook 2024: Moving Towards Increased Affordability; IEA: Paris, France, 2024. [Google Scholar]
- IEA (Ed.) Global CO2 Emissions by Sector, 2019–2022; IEA: Paris, France, 2023. [Google Scholar]
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; Skabardonis, A.; Zafiropoulou, V. Connected & autonomous vehicles—Environmental impacts—A review. Sci. Total Environ. 2020, 712, 135237. [Google Scholar] [CrossRef] [PubMed]
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Veh. Syst. Dyn. 2010, 48, 1167–1192. [Google Scholar] [CrossRef]
- Anselma, P.G. Optimization-Driven Powertrain-Oriented Adaptive Cruise Control to Improve Energy Saving and Passenger Comfort. Energies 2021, 14, 2897. [Google Scholar] [CrossRef]
- Schmied, R.; Waschl, H.; Quirynen, R.; Diehl, M.; del Re, L. Nonlinear MPC for Emission Efficient Cooperative Adaptive Cruise Control. IFAC-PapersOnLine 2015, 48, 160–165. [Google Scholar] [CrossRef]
- Ma, F.; Yang, Y.; Wang, J.; Li, X.; Wu, G.; Zhao, Y.; Wu, L.; Aksun-Guvenc, B.; Guvenc, L. Eco-driving-based cooperative adaptive cruise control of connected vehicles platoon at signalized intersections. Transp. Res. Part D Transp. Environ. 2021, 92, 102746. [Google Scholar] [CrossRef]
- Weißmann, A.; Görges, D.; Lin, X. Energy-optimal adaptive cruise control combining model predictive control and dynamic programming. Control Eng. Pract. 2018, 72, 125–137. [Google Scholar] [CrossRef]
- Luo, Y.; Chen, T.; Zhang, S.; Li, K. Intelligent Hybrid Electric Vehicle ACC with Coordinated Control of Tracking Ability, Fuel Economy, and Ride Comfort. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2303–2308. [Google Scholar] [CrossRef]
- Li, S.; Li, K.; Rajamani, R.; Wang, J. Model predictive multi-objective vehicular adaptive cruise control. IEEE Trans. Control Syst. Technol. 2011, 19, 556–566. [Google Scholar] [CrossRef]
- Vajedi, M.; Azad, N. Ecological adaptive cruise controller for plug-in hybrid electric vehicles using nonlinear model predictive control. IEEE Trans. Intell. Transp. Syst. 2016, 17, 113–122. [Google Scholar] [CrossRef]
- Musa, A.; Miretti, F.; Misul, D. MPC-Based Cooperative Longitudinal Control for Vehicle Strings in a Realistic Driving Environment. In Proceedings of the SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2023. [Google Scholar] [CrossRef]
- Fiorillo, C.; Mauro, M.; Biswas, A.; Bonfitto, A.; Emadi, A. Designing a Real-Time Implementable Optimal Adaptive Cruise Control for Improving Battery Health and Energy Consumption in EVs through V2V Communication. Energies 2024, 17, 1986. [Google Scholar] [CrossRef]
- Pan, C.; Huang, A.; Wang, J.; Chen, L.; Liang, J.; Zhou, W.; Wang, L.; Yang, J. Energy-optimal adaptive cruise control strategy for electric vehicles based on model predictive control. Energy 2022, 241, 122793. [Google Scholar] [CrossRef]
- Borneo, A.; Zerbato, L.; Miretti, F.; Tota, A.; Galvagno, E.; Misul, D.A. Platooning Cooperative Adaptive Cruise Control for Dynamic Performance and Energy Saving: A Comparative Study of Linear Quadratic and Reinforcement Learning-Based Controllers. Appl. Sci. 2023, 13, 10459. [Google Scholar] [CrossRef]
- Zhu, M.; Wang, Y.; Pu, Z.; Hu, J.; Wang, X.; Ke, R. Safe, efficient, and comfortable velocity control based on reinforcement learning for autonomous driving. Transp. Res. Part C Emerg. Technol. 2020, 117, 102662. [Google Scholar] [CrossRef]
- Acquarone, M.; Borneo, A.; Misul, D.A. Acceleration control strategy for Battery Electric Vehicle based on Deep Reinforcement Learning in V2V driving. In Proceedings of the 2022 IEEE Transportation Electrification Conference & Expo (ITEC), Anaheim, CA, USA, 15–17 June 2022. [Google Scholar] [CrossRef]
- Borneo, A.; Miretti, F.; Acquarone, M.; Misul, D. Battery Electric Vehicle Control Strategy for String Stability Based on Deep Reinforcement Learning in V2V Driving; SAE Technical Paper Series; SAE International: Warrendale, PA, USA, 2023. [Google Scholar] [CrossRef]
- Bertsekas, D.P. Dynamic Programming and Optimal Control; Athena Scientific: Nashua, NH, USA, 2012. [Google Scholar]
- Nguyen, D.G.; Park, S.; Park, J.; Kim, D.; Eo, J.S.; Han, K. An MPC Approximation Approach for Adaptive Cruise Control With Reduced Computational Complexity and Low Memory Footprint. IEEE Trans. Intell. Veh. 2024, 9, 3154–3167. [Google Scholar] [CrossRef]
- Lin, X.; Görges, D. Robust Model Predictive Control of Linear Systems With Predictable Disturbance With Application to Multiobjective Adaptive Cruise Control. IEEE Trans. Control Syst. Technol. 2020, 28, 1460–1475. [Google Scholar] [CrossRef]
- Ostertag, E. Mono- and Multivariable Control and Estimation: Linear, Quadratic and LMI Methods; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Selvaraj, D.; Hegde, S.; Amati, N.; Deflorio, F.; Chiasserini, C. An ML-Aided Reinforcement Learning Approach for Challenging Vehicle Maneuvers. IEEE Trans. Intell. Veh. 2023, 8, 1686–1698. [Google Scholar] [CrossRef]
- Lin, Y.; McPhee, J.; Azad, N.L. Comparison of Deep Reinforcement Learning and Model Predictive Control for Adaptive Cruise Control. IEEE Trans. Intell. Veh. 2021, 6, 221–231. [Google Scholar] [CrossRef]
- Li, L.; Wang, X.; Song, J. Fuel consumption optimization for smart hybrid electric vehicle during a car-following process. Mech. Syst. Signal Process. 2017, 87, 17–29. [Google Scholar] [CrossRef]
- Li, S.E.; Guo, Q.; Xu, S.; Duan, J.; Li, S.; Li, C.; Su, K. Performance Enhanced Predictive Control for Adaptive Cruise Control System Considering Road Elevation Information. IEEE Trans. Intell. Veh. 2017, 2, 150–160. [Google Scholar] [CrossRef]
- Luo, L.h.; Liu, H.; Li, P.; Wang, H. Model predictive control for adaptive cruise control with multi-objectives: Comfort, fuel-economy, safety and car-following. J. Zhejiang Univ. Sci. A 2010, 11, 191–201. [Google Scholar] [CrossRef]
- Nie, Z.; Farzaneh, H. Adaptive Cruise Control for Eco-Driving Based on Model Predictive Control Algorithm. Appl. Sci. 2020, 10, 5271. [Google Scholar] [CrossRef]
- Guzzella, L.; Sciarretta, A. Vehicle Propulsion Systems: Introduction to Modeling and Optimization; Springer: Berlin/Heidelberg, Germany, 2013. [Google Scholar] [CrossRef]
- Bageshwar, V.; Garrard, W.; Rajamani, R. Model Predictive Control of Transitional Maneuvers for Adaptive Cruise Control Vehicles. IEEE Trans. Veh. Technol. 2004, 53, 1573–1585. [Google Scholar] [CrossRef]
- Wu, C.; Xu, Z.; Liu, Y.; Fu, C.; Li, K.; Hu, M. Spacing Policies for Adaptive Cruise Control: A Survey. IEEE Access 2020, 8, 50149–50162. [Google Scholar] [CrossRef]
- Vogel, K. A comparison of headway and time to collision as safety indicators. Accid. Anal. Prev. 2003, 35, 427–433. [Google Scholar] [CrossRef]
- Bertsekas, D.P. Bertsekas, 4th ed.; Athena Scientific: Belmont, MA, USA, 2017; Volume 1. [Google Scholar]
- Miretti, F.; Misul, D.; Spessa, E. DynaProg: Deterministic Dynamic Programming solver for finite horizon multi-stage decision problems. SoftwareX 2021, 14, 100690. [Google Scholar] [CrossRef]
- Hülsebusch, D.; Salfeld, M.; Xia, Y.; Gauterin, F. Adaptive Cruise Control: A Behavioral Assessment of Following Traffic Participants Due to Energy Efficient Driving Strategies. In Proceedings of the FISITA 2012 World Automotive Congress; Springer: Berlin/Heidelberg, Germany, 2012; pp. 209–220. [Google Scholar] [CrossRef]
- Hulsebusch, D.; Salfeld, M.; Ponomarev, I.; Gauterin, F. The impact of energy efficient driving strategies on rear-end safety. In Proceedings of the 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013), The Hague, The Netherlands, 6–9 October 2013. [Google Scholar] [CrossRef]
- Lofberg, J. YALMIP: A toolbox for modeling and optimization in MATLAB. In Proceedings of the 2004 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 2–4 September 2004; pp. 284–289. [Google Scholar] [CrossRef]
- Jerez, J.L.; Kerrigan, E.C.; Constantinides, G.A. A condensed and sparse QP formulation for predictive control. In Proceedings of the IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011. [Google Scholar] [CrossRef]
- MOSEK ApS. The MOSEK Optimization Suite. Version 10.2.1; MOSEK ApS: København, Denmark, 2024. [Google Scholar]
- Zeilinger, M.N.; Jones, C.N.; Morari, M. Robust stability properties of soft constrained MPC. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| UDDS | ARDC | AUDC | RD1 | RD2 | |
|---|---|---|---|---|---|
| Duration (s) | 1369 | 1082 | 993 | 381 | 435 |
| Mean velocity (m/s) | 8.7520 | 15.9487 | 4.8992 | 5.5080 | 4.9888 |
| Max velocity (m/s) | 25.347 | 30.972 | 16.028 | 14.427 | 18.073 |
| RMS acceleration (m/s2) | 0.6091 | 0.6289 | 0.7785 | 0.7370 | 0.7013 |
| UDDS | ARDC | AUDC | RD1 | RD2 | |
|---|---|---|---|---|---|
| Leader (kg) | 1.1102 | 1.5676 | 0.5518 | 0.2288 | 0.2479 |
| MPCnoFC (kg) | 1.0727 | 1.5127 | 0.4576 | 0.2017 | 0.2147 |
| MPCFC (kg) | 1.0692 | 1.5085 | 0.4563 | 0.2006 | 0.2142 |
| DP (kg) | 1.0141 | 1.4590 | 0.4293 | 0.1900 | 0.1953 |
| UDDS | ARDC | AUDC | RD1 | RD2 | |
|---|---|---|---|---|---|
| MPCnoFC | 3.4% | 3.5% | 17.1% | 11.8% | 13.4% |
| MPCFC | 3.7% | 3.8% | 17.3% | 12.3% | 13.6% |
| DP | 8.6% | 6.9% | 22.2% | 16.9% | 21.2% |
| Leader | MPCFC | MPCnoFC | DP | |
|---|---|---|---|---|
| RMS acc UDDS (m/s2) | 0.6091 | 0.4924 | 0.4963 | 0.5218 |
| RMS acc AUDC (m/s2) | 0.7785 | 0.4728 | 0.4764 | 0.4412 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Borneo, A.; Miretti, F.; Misul, D.A. Fuel Efficiency Optimization in Adaptive Cruise Control: A Comparative Study of Model Predictive Control-Based Approaches. Appl. Sci. 2024, 14, 9833. https://doi.org/10.3390/app14219833
Borneo A, Miretti F, Misul DA. Fuel Efficiency Optimization in Adaptive Cruise Control: A Comparative Study of Model Predictive Control-Based Approaches. Applied Sciences. 2024; 14(21):9833. https://doi.org/10.3390/app14219833
Chicago/Turabian StyleBorneo, Angelo, Federico Miretti, and Daniela Anna Misul. 2024. "Fuel Efficiency Optimization in Adaptive Cruise Control: A Comparative Study of Model Predictive Control-Based Approaches" Applied Sciences 14, no. 21: 9833. https://doi.org/10.3390/app14219833
APA StyleBorneo, A., Miretti, F., & Misul, D. A. (2024). Fuel Efficiency Optimization in Adaptive Cruise Control: A Comparative Study of Model Predictive Control-Based Approaches. Applied Sciences, 14(21), 9833. https://doi.org/10.3390/app14219833