Abstract
The cyclic towing system for underwater vehicles presented in this paper is a platform, featuring high efficiency and flexibility that is specifically designed for hydrodynamic experiments with underwater vehicles in an experimental water tank. To study the dynamic characteristics of the cyclic towing system, this paper employs the Lagrange equations of the second kind to model the key components of the system, including the underwater vehicle, towing wheel, guiding wheel, tensioning device, and cable. The model calculates the system’s stiffness, damping, mass, and fluid resistance equations, while the overall dynamic model of the system is numerically solved using the Runge–Kutta method. The validity of this model was verified by comparing and analyzing the simulation results with those from the commercial software ADAMS. Finally, this paper discusses the effects of different operating conditions, such as input torque and tensioning force, on the system’s operation. The research findings can provide theoretical support for engineering applications of cyclic towing systems.
1. Introduction
As the new century faces multiple challenges, such as resource constraints and environmental concerns, the ocean, with its abundant biological resources, is bound to attract increasing attention. As marine resources have been developed and utilized, related equipment and experimental devices have also rapidly evolved [1,2]. The cyclic towing system proposed in this paper is a system established in an experimental water tank that enables the dynamic testing of underwater vehicles. The cyclic towing system mainly consists of a main base bracket, auxiliary base bracket, towing device, tensioning device, depth adjustment device, cable circuit, and electrical control system. The system can support underwater vehicle masses ranging from 100 kg to 1500 kg. The system is constructed based on an experimental water tank, using a lifting platform to submerge the towed underwater vehicle from the surface to the bottom of the tank, simulating the underwater navigation state of a submarine model. This provides a realistic environment for verification and research. During the towing experiments, an underwater vehicle is connected to the towing cable circuit, with two parallel guide ropes attached to the left and right ends of the model. The mechanical tensioning device tightens the cable circuit, ensuring that the upper and lower transverse cables are in a horizontally straight line. The depth adjustment device regulates the depth at which the lower section of the cable circuit submerges underwater, as well as the depth of the model. The towing device drives the cable circuit to rotate clockwise and counterclockwise through the towing wheel, thereby moving the tested vessel back and forth between the two ends of the tank in both reverse and forward directions. This setup enables the model to accelerate, maintain a constant speed, and decelerate at different submergence depths. The schematic diagram of the cyclic towing system is shown in Figure 1.
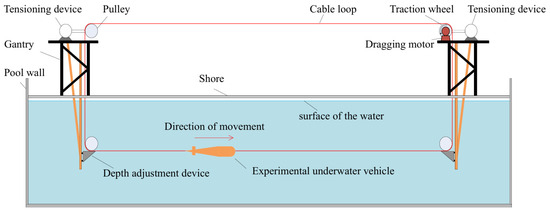
Figure 1.
Schematic diagram of the towing system.
The primary purpose of the experimental water tank is to conduct hydrodynamic experiments on underwater vehicles, using model testing methods to analyze and evaluate an underwater vehicle’s speed, propulsion power, and other performance characteristics. In recent years, underwater vehicle towing systems have gradually improved in terms of structural complexity and operational stability. Based on different system structures, underwater vehicle towing systems can be categorized into single flexible cable towing systems, double flexible cable towing systems, and self-propelled towing systems [3,4]. The single flexible cable towing system, which is the type of towing system studied in this paper, typically consists of a motor and a pulley cable transmission loop, forming an overall closed-loop structure; the double flexible cable towing system usually consists of two hydraulic winches, one at the front and one at the rear, connected to the towed body through two independent pulley cable transmission loops, forming an open-type, multi-body series transmission system; the self-propelled towing system has a simple structure that uses a motor-driven device to provide power, a carriage to move the towed body laterally, and a corresponding lifting device to submerge the towed body to different depths underwater.
In recent years, numerous scholars have conducted extensive research on underwater vehicle towing systems in experimental water tanks, with a focus on system modeling and the development of various advanced control techniques. Liu Gang et al. designed a double flexible cable towing-type catapult test carriage system built in a shallow water tank, developed dynamic models for both the carriage and the hydraulic mechanism, studied the dynamic characteristics of the towing system through simulations, and proposed a coordinated control strategy for double flexible cable towing and a multi-mode switching control strategy in response to the force coupling characteristics of dual-drive hydraulic winches [5,6]. Xun Shirui et al. proposed a control strategy based on F+PID fuzzy switching controls for underwater motion control of a double flexible cable towing-type catapult test carriage [7]. Y. Zhao et al. proposed a single flexible cable towing-type catapult test carriage system based on a self-submersible tension leg platform, developed the mathematical model for the single flexible cable towing carriage system, and conducted research on high-precision speed control technology for the track carriage [8]. Xia Y et al. developed a joint space-based dynamic model for an underwater tension leg platform driven by hydraulic winches, proposed a dual-loop control strategy, and conducted research on the dynamic modeling and control issues of the test platform [9]. Wang Xinyu et al. designed a double winch structure for use in a cyclic towing system, calculated the structural parameters of the winch, and conducted a finite element analysis of the structure using ANSYS, demonstrating the reliability of the optimized structural design compared to traditional winches [10]. Chen Yulong et al. calculated the operating parameters of a carriage truss in a self-propelled towing system and conducted a finite element analysis of the main beam of the carriage and the central testing platform’s lifting rod, providing a foundation for the system’s operational stability [11,12]. Kang Hao et al. used ANSYS finite element software to perform vibration and mechanical analysis on the key parts of the towing system’s carriage chassis, verifying its structural characteristics [13]. Feng H et al. proposed a two-part underwater towing system for near-surface towing experiments, obtained hydrodynamic coefficients through experimental methods, and developed a mathematical model of the two-part towing system, demonstrating that the lift compensation device can improve system stability by reducing depth fluctuations of the ballast [14].
This study establishes a dynamic model for an underwater cyclical test platform system using the Lagrangian equation and implements a program in the MATLAB (2023b) environment, employing the fourth- to fifth-order Runge–Kutta algorithm for dynamic simulation analysis. To verify the accuracy of the proposed method, a comparison is made between the results for displacement, velocity, acceleration, and tension obtained using the multibody dynamics software ADAMS (v.24.1) and the Lagrangian equation for the same example. Moreover, compared to ADAMS, the Lagrangian method offers unique advantages. For instance, the cable model, which consists of a spring and damper, can address cable elongation—a problem that ADAMS cannot solve—and is analyzed separately in Section 4 of this paper. The focus of this study is to investigate the impact of key parameters, such as different input torques and tension forces, on the speed fluctuations, cable deformation, and tension of underwater vehicles. Cyclical systems are widely used in modern society across various devices and platforms, such as cyclical test stands and elevators. This research aims to develop an accurate dynamic model for such cyclical systems, providing scientific guidance for their design and optimization to meet the needs of practical engineering applications.
2. Model Development
2.1. System Dynamics Modeling
When establishing the model, considering that the depth of the system remains constant during the experiment and that the underwater vehicle moves at a fixed depth underwater, the longitudinal state vector of the system is not taken into account. Additionally, the complex accompanying components and structures of the cyclic towing system are neglected, simplifying the dynamic model of the cyclic towing system. Underwater vehicles are considered as a mass block, and after simplification and analysis, a system with multiple state variables is obtained. The system mainly consists of the towing wheel, guiding wheel, cable circuit, underwater vehicle, and tensioning device. In the cyclic towing system, all components are primarily connected in series through a cable, which plays a crucial role. During the operation of the underwater vehicle, the length of the cable continuously changes over time, mainly affecting the mass and stiffness of the cable. Therefore, the cable is discretized into a spring–damper system [15]. The dynamic model of the cyclic towing system in this paper is based on the following three assumptions:
- (1)
- The lateral elastic deformation of the cable does not reach its elastic limit and follows Hooke’s law;
- (2)
- The density and cross-sectional area of each segment of the cable are identical, ensuring continuity;
- (3)
- The longitudinal displacement of the cable is neglected; only the effect of the lateral deformation of the cable on the system is considered.
The parameters in Figure 2 are defined as follows: —equivalent mass of the towing wheel and tensioning device, equivalent mass of the guiding wheel and tensioning device, and the mass of the underwater vehicle; —equivalent mass, stiffness, and damping of each equally divided segment of the cable between the towing wheel and the underwater vehicle; —equivalent mass, stiffness, and damping of each equally divided segment of the cable between the guiding wheel and the underwater vehicle; —equivalent mass, stiffness, and damping of each equally divided segment of the cable between the guiding wheel and the towing wheel; —stiffness and damping of the tensioning device; —rotational inertia of the towing wheel, radius of the towing wheel, and the angular displacement of the towing wheel; —rotational inertia of the guiding wheel, radius of the guiding wheel, and the angular displacement of the guiding wheel.
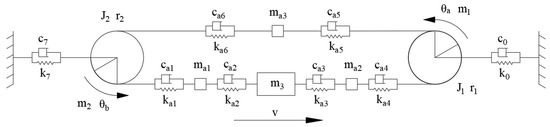
Figure 2.
Dynamic model of the cyclic towing system.
The structural force analysis of the cyclic towing system is shown in Figure 3. In the model, all linear displacements to the right are considered positive, and all angular displacements in the counterclockwise direction are considered positive. The dynamic equations of the cyclic towing system are established based on the Lagrange equation:
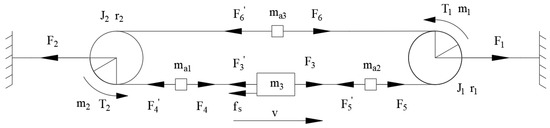
Figure 3.
Structural force analysis of the cyclic towing system.
The variables in Equation (1) are defined as: T—system kinetic energy, U—system potential energy, D—system dissipation function, —system generalized coordinates, —system generalized velocities, and —system generalized forces.
The system’s kinetic energy T is given by:
The system’s potential energy U is given by:
The system’s dissipation term D is given by:
In the process of analyzing the system, only the lateral vector of the model is considered, without taking into account the longitudinal vector of the model, so the influence of gravity and buoyancy in the system are not considered. Based on Equations (1)–(4), the equations of motion are derived from the Lagrange equation as a system of differential equations:
In the equation:
where:
- —Generalized mass, stiffness, and damping matrices;
- —Generalized displacement, velocity, and acceleration matrices;
- —Generalized force matrix;
- —Displacement of the mass bodies ;
- —Angular displacement of the traction wheel and guide wheel;
- —Velocity of the mass bodies ;
- —Angular velocity of the traction wheel and guide wheel;
- —Acceleration of the mass bodies ;
- —Angular acceleration of the traction wheel and guide wheel;
- —The force applied to the mass body ;
- —Torque applied to the traction wheel and guide wheel.
2.2. External Load Modeling
During the operation of the cyclic towing system, the system is primarily subjected to external forces, such as tension and fluid resistance. Tension plays a crucial role in the system, as the tensioning device, by applying force to the cable, prevents nonlinear slackening of the long cable, thereby enhancing system stability. In this study, the tension is set as a constant and is added to the generalized force matrix.
During full underwater operation tests in an experimental water tank, the underwater vehicle is subjected to fluid resistance. To this end, the fluid resistance of the underwater vehicle in the water tank was calculated and analyzed using the computational fluid dynamics software Fluent (v.5.0.4). Additionally, simulation software was used to measure the fluid resistance and drag coefficient of the underwater vehicle under different operating conditions. Using SolidWorks software (2024), a 3D model was created based on the geometric dimensions of the underwater vehicle, disregarding minor features during the modeling process. The front and rear of the underwater vehicle were modeled as semi-ellipsoidal, with the middle section modeled as a cylinder measuring 1 m in length and 0.4 m in diameter. For the fluid computation domain, the upstream boundary was set as a velocity inlet, the downstream boundary was set as a free outlet, and the surrounding boundaries and the computational model were treated as solid walls. Mesh generation employed inflation and localized meshing. The inflation boundary was set to the vehicle’s outer surface, with a maximum of 15 layers, a growth rate of 1.2, and a transition ratio of 0.25. In the localized meshing, the element size for the outer surface of the fluid domain was set to 0.2 m, while the element size for the main area of interest, the vehicle’s outer surface, was set to 0.005 m. This resulted in 965,892 nodes and a total of 2,568,133 mesh elements. The turbulence model used was the standard k-epsilon model with standard wall functions, and the coupled algorithm was applied to solve the pressure–velocity coupling equations, with 5000 iterations. The fluid resistance experienced by the underwater vehicle increases with its speed; therefore, the fluid resistance was calculated for the vehicle at speeds of 1 m/s, 2 m/s, 3 m/s, and 4 m/s. Using Fluent, the drag on the underwater vehicle in the fluid domain under different speed conditions can be obtained, with the drag coefficient calculated according to the fluid resistance formula [16]:
The variables in Equation (6) are defined as: —velocity of the vehicle, —hydrodynamic resistance, —water density, —projected area of the underwater vehicle relative to the water flow direction, and —drag coefficient.
After conducting four simulation runs, the dimensionless drag coefficients were averaged, resulting in an average drag coefficient of 0.248 for an underwater vehicle in the direction of travel, as shown in Table 1. Therefore, the water resistance can be calculated using the following formula:

Table 1.
Calculated results of the underwater vehicle’s drag and drag coefficient.
3. Model Validation
To ensure the validity of the dynamic model and the simulation of the cyclic towing system, it is necessary to validate the dynamic model discussed earlier. This section primarily focuses on conducting simulation experiments on the system model using MATLAB simulation software and comparing the results with those obtained from the commercial software ADAMS. The ADAMS/cable module offers two methods for modeling pulley cable systems: the simplified method and the discrete method [17]. The simplified method provides a quick approach to modeling, where the effects of gravity, inertia, bending stiffness, and torsional stiffness on the cable during transmission are not considered; the discrete method, on the other hand, discretizes the cable into small spheres, which are interconnected by generalized forces. Compared to the simplified method, the discrete method incorporates the mass, inertia, bending stiffness, and torsional stiffness of the cable into the model, allowing for a more accurate representation of the transmission process between the cable and pulley. To improve the accuracy of the calculations, the discrete method was used for modeling in this study.
For validation, the method presented in this paper and the ADAMS software applied the same torque at the drive wheel, and the distance between the towing wheel and the guiding wheel was set to 40 m, while a tension of 3500 N was applied to the cable. The displacement, velocity, and acceleration were compared to analyze the errors between the two methods. The parameters used in the validation of the Lagrangian equation are shown in Table 2. These parameters are derived from an actual physical project and represent data obtained through on-site measurements during project implementation. In this study, the ODE45 function in MATLAB was used to solve differential equations. ODE45 employs a fourth- to fifth-order Runge–Kutta algorithm, where the fourth-order method provides a candidate solution and the fifth-order method controls the error. This adaptive (variable-step) numerical solution method is used to integrate the differential equations of the variable coefficient cyclic towing system. The calculation flowchart is shown in Figure 4. In the commercial software ADAMS, the discrete model of a cyclic towing system is established using the parameterized integration module cable. The parameters for the cable in the model are set as follows: diameter of 17 mm, length of 40 m, Young’s modulus of 6 × 109 N/m2, density of 970 kg/m3, and an element count of 200. The contact parameters between the cable and pulley are defined as: contact stiffness of 104 N/mm, force exponent of 1, damping coefficient of 0.1, and friction coefficient of 0.6. The dimensions of the pulleys are set as follows: the driving pulley has a diameter of 0.8 m, and the guiding pulley has a diameter of 0.7 m with a width of 50 mm and depth of 20 mm. When applying external load fluid resistance, although ADAMS software lacks a dedicated module for fluid resistance calculations, this can be achieved by treating the fluid resistance as a unidirectional force applied to the center of mass of the underwater vehicle [18]. Since fluid resistance is related to the vehicle’s speed, the software can monitor the speed of the underwater vehicle, substitute it into the fluid resistance formula, and then apply the calculated force to the model’s center of mass. The simulation time is set equal to the operating time of the underwater vehicle. The solver employs the GSTIFF method, with an integration error and a time step set to 0.001 and 0.01 s, respectively.
Table 2.
Parameters of the cyclic towing system.
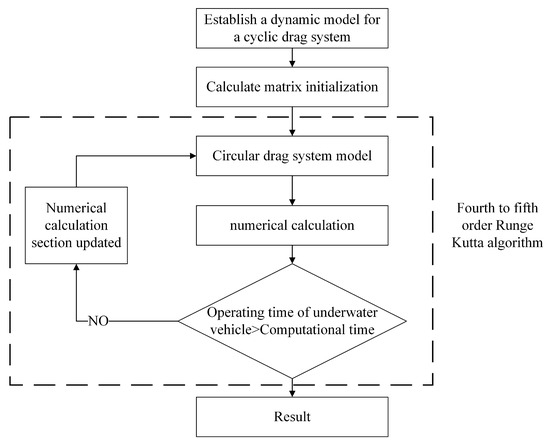
Figure 4.
Calculation flowchart.
As shown in Figure 5b, the displacement of the underwater vehicle calculated using the method in this paper was 8.005 m, while the displacement simulated by the ADAMS software was 8.035 m, resulting in a relative error of 0.37%. From the speed curve of the underwater vehicle shown in the figure, it can be observed that the vehicle undergoes acceleration from 0 to 2 s, moves at a constant speed from 2 to 4 s, and decelerates from 4 to 6 s. The cyclic towing test system primarily focuses on the stability of the vehicle’s speed during the constant speed phase, as this is crucial for conducting hydrodynamic experiments with the underwater vehicle. Therefore, the comparison here is mainly focused on the constant speed phase. The average speed of the underwater vehicle during the constant speed phase, calculated by the method in this paper, was 2.0235 m/s, while the average speed during the constant speed phase in the ADAMS simulation was 2.0174 m/s, resulting in a relative error of 0.3%; the average acceleration of the underwater vehicle during the constant speed phase, calculated by the method in this paper, was 0.0155 m/s2, while the average acceleration during the constant speed phase in the ADAMS software was 0.0166 m/s2, resulting in a relative error of 6.63%. The average tension in the cable during the steady-state segment, calculated using the method in this study, was 5001 N, while the value obtained from the ADAMS simulation was 5125 N, resulting in a relative error of 4.7%. Figure 5f–h show the comparison of displacement, speed, and acceleration, respectively, for the upper end of the cable in the cyclic towing system, with the curves closely aligning. In summary, the modeling method adopted in this paper is feasible and can be used to simulate the motion process of the cyclic towing system.
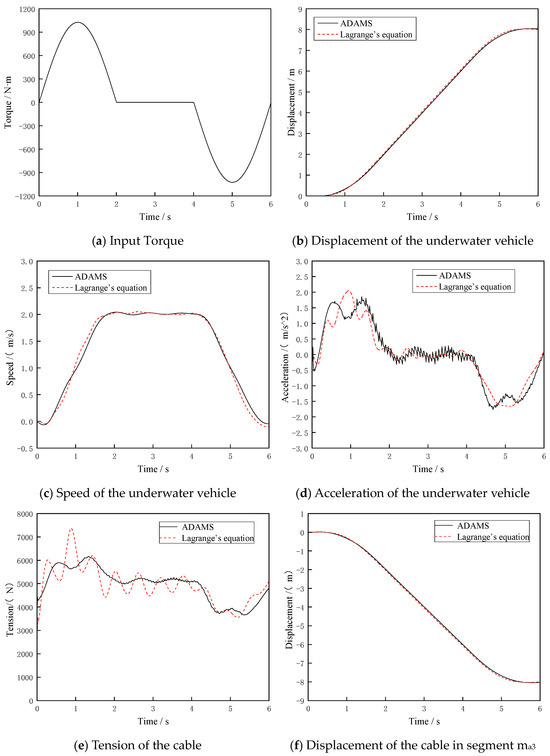
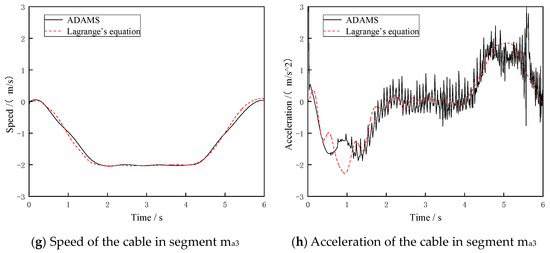
Figure 5.
Validation of the dynamic model for the cyclic towing system.
4. Analysis of Key Parameter Influences
4.1. Different Input Torques
In Case Study 1, by applying different torques to the towing wheel, setting the tension force on the cable to 3500 N, keeping other parameters unchanged, and using the parameter settings from Table 2, the underwater vehicle’s constant speed phase achieves the target speeds of 1 m/s, 2 m/s, 3 m/s, and 4 m/s. Figure 6 presents the displacement and speed of the underwater vehicle, the tension and deformation of the equally divided sections of the cable between the towing wheel and the underwater vehicle, and the relationship between the input torque of the towing wheel and the speed of the underwater vehicle.
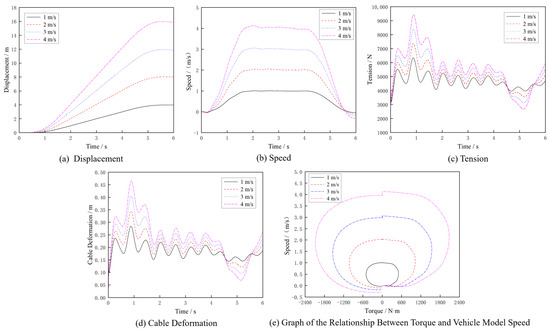
Figure 6.
Dynamic curves for the underwater vehicle and cable under different input torques.
As shown in Figure 6e, when the maximum input torques reach 504 N·m, 1026 N·m, 1538 N·m, and 2078 N·m, the underwater vehicle’s constant speed phases correspond to 1 m/s, 2 m/s, 3 m/s, and 4 m/s, respectively. The displacement of the underwater vehicle is 3.973 m, 8.005 m, 11.889 m, and 15.88 m, respectively. As shown in Figure 6b, during the 2–4 s constant speed phase, the speed fluctuations of the underwater vehicle are within the ranges of 0.991 m/s to 1.01 m/s, 1.996 m/s to 2.051 m/s, 2.96 m/s to 3.06 m/s, and 3.952 m/s to 4.126 m/s, respectively. When the towing wheel is controlled according to the ideal input curve, although the underwater vehicle can move with the towing device, the flexibility and elasticity of the cable cause varying degrees of speed fluctuations during the constant speed phase, leading to unstable motion. In fact, as the input torque increases, the operating speed of the underwater vehicle becomes faster, and the speed fluctuations become more pronounced.
In the cyclic towing system, long-distance, flexible cables are key components, as their deformation becomes a critical focus in system operations due to their relaxation nonlinearities. Traditional studies on cables often assume that the cable is a rigid body. For instance, in commercial software such as ADAMS, cables are typically discretized as small spheres connected by generalized forces. However, actual flexible cables are composed of multiple intertwined strands, and when subjected to tension, they exhibit complex viscoelastic mechanical behaviors. To better approximate real-world conditions, this paper adopts the Kelvin–Voigt model as the mechanical model for the cable. This model consists of a spring and a damper, allowing for simultaneous consideration of the cable’s stiffness and damping characteristics, thus more accurately simulating the elastic and viscous behavior of the cable during stretching. According to Figure 6c,d, the maximum tension in the cable occurs during the acceleration phase, with values of 6341 N, 7362 N, 8377 N, and 9424 N, respectively. At these points, the maximum deformation of the cable is 0.284 m, 0.344 m, 0.404 m, and 0.465 m, corresponding to maximum elongation rates of 0.73%, 0.89%, 1.04%, and 1.2%, respectively. During the constant speed phase, the average tension in the cable is 4698 N, 5001 N, 5304 N, and 5596 N, respectively, while the corresponding average deformation of the cable is 0.188 m, 0.206 m, 0.224 m, and 0.241 m. During the acceleration phase, as the load increases, the tension in the cable significantly rises, which in turn enhances elastic stress, leading to more pronounced tensile deformation of the cable. During the constant speed phase, although the tension decreases, it still gradually increases with the load. The higher tension causes greater deformation, making the experimental underwater vehicle more prone to speed fluctuations. In the deceleration phase, as the system’s kinetic energy gradually decreases, the tension in the cable also reduces, leading to a corresponding decrease in the extent of its deformation.
4.2. Different Tension Forces
In Case Study 2, the tensioning device applies tension forces of 1500 N, 2500 N, 3500 N, and 4500 N to the cable, while other parameters remain unchanged. At this time, the towing wheel is given the same input torque, enabling the underwater vehicle to reach the target speed of 2 m/s. Figure 7 presents the displacement and speed of the underwater vehicle, the tension and deformation of the equally divided sections of the cable between the towing wheel and the underwater vehicle, and the relationship between the input torque of the towing wheel and the speed of the underwater vehicle.
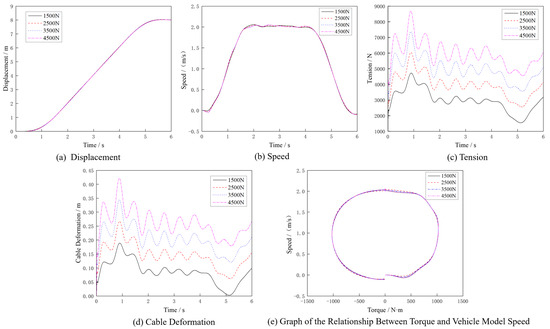
Figure 7.
Dynamic curves of the underwater vehicle and cable under different tension forces.
As the tension force gradually increases, it can be observed from Figure 7a that the displacement of the underwater vehicle is 8.01 m, 8.008 m, 8.005 m, and 8.003 m, respectively. According to Figure 7b, during the constant speed phase, the speed fluctuation ranges of the underwater vehicle are 1.989 m/s to 2.056 m/s, 1.994 m/s to 2.057 m/s, 1.996 m/s to 2.051 m/s, and 1.997 m/s to 2.053 m/s, respectively. It is evident that, under the same input torque, as the tension force increases from 1500 N to 3500 N, the range of speed fluctuations gradually decrease. This indicates that, as the tension force increases, the fluctuations of forces within the towing system on the cable and the impact of external disturbances on the speed of the towed body are reduced, thereby improving the speed stability of the system. However, when the tension force is between 3500 N and 4500 N, the change in the speed fluctuation range is minimal. This is because the tension force has reached an optimal range for suppressing speed fluctuations. In practical applications, it is crucial to select an appropriate tension force to ensure speed stability while saving energy and reducing equipment wear.
As shown in Figure 7c,d, under the tension forces of 1500 N, 2500 N, 3500 N, and 4500 N, the maximum tension in the cable occurs during the acceleration phase, with values of 4722 N, 6040 N, 7362 N, and 8686 N, respectively. At these points, the maximum deformation of the cable is 0.189 m, 0.267 m, 0.344 m, and 0.422 m, with corresponding maximum elongation rates of 0.49%, 0.69%, 0.89%, and 1.09%. The average tension in the cable during the constant speed phase is 2991 N, 4002 N, 5000 N, and 5999 N, while the average deformation of the cable is 0.088 m, 0.147 m, 0.206 m, and 0.264 m, respectively. With an increase in tensioning force applied to the system by the tensioning device, the elastic stress is intensified, resulting in the significant stretching deformation of the cable.
5. Conclusions
This paper derives dynamic differential equations of a cyclic towing system based on Lagrange equations of the second kind. The fluid resistance coefficient of the underwater vehicle was calculated using the computational fluid dynamics software Fluent, and the resistance was then calculated using the fluid resistance formula. A dynamic model of a cyclic towing system for an underwater vehicle was thus established. The model’s validity was verified through comparison with the commercial software ADAMS. Furthermore, the effect of different input torques and tension forces on the system’s operation were discussed. The following conclusions were drawn:
- (1)
- The dynamic model of the cyclic towing system for an underwater vehicle can predict the vehicle’s displacement, velocity, cable tension, and cable deformation. In different case studies with varying input torques, the speed fluctuations of the underwater vehicle are significantly influenced by the flexibility and elasticity of the cable. As the input torque increases, the deformation of the cable intensifies, leading to more pronounced speed fluctuations.
- (2)
- Regarding the tension force applied to the cable by the tensioning device, as the tension force increases, the operation of the underwater vehicle during the constant speed phase becomes more stable. The tension force prevents the cable from becoming overly slack. However, there is an optimal range where the tension force effectively suppresses speed fluctuations.
- (3)
- To calculate the deformation of the cable during system operation, this paper adopts the Kelvin–Voigt mechanical model for the cable. Unlike the discrete model used in commercial software such as ADAMS, the proposed method accurately computes the cable’s deformation. From Case Study 1 and 2, it is evident that the cable tension increases with an increase in input torque and tensioning force, and the cable’s deformation also increases. The maximum cable tensions observed were 9424 N and 8686 N, respectively, corresponding to maximum elongation rates of 1.2% and 1.09%.
The simulation method presented in this paper can predict the dynamic characteristics of the system under different input torques and tension forces, providing theoretical guidance for the design, development, and improvement of cyclic towing systems.
Author Contributions
Methodology, X.L.; Software, X.L.; Validation, X.L.; Formal analysis, X.L.; Writing—original draft, X.L.; Writing—review & editing, S.H.; Supervision, S.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
The raw data supporting the conclusions of this article will be made available by the authors on request.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Xia, Y.; Xu, K.; Li, Y.; Xu, G.; Xiang, X. Modeling and three-layer adaptive diving control of a cable-driven underwater parallel platform. IEEE Access 2018, 6, 24016–24034. [Google Scholar] [CrossRef]
- Pugi, L.; Allotta, B.; Pagliai, M. Redundant and reconfigurable propulsion systems to improve motion capability of underwater vehicles. Ocean Eng. 2018, 148, 376–385. [Google Scholar] [CrossRef]
- Wang, S.; Bai, X.; Liu, N. Structural Design and Analysis of Towing Tank Carriage. J. Tianjin Univ. Technol. 2023, 39, 9–15. [Google Scholar]
- Liu, G. Research on Cooperative Control Technology of Dual Flexible Cable Towing for Ejection Test Car in Constrained Space. Ph.D. Thesis, Huazhong University of Science and Technology, Wuhan, China, 2020. [Google Scholar]
- Liu, G.; Xu, G.; Wang, G.; Yuan, G.; Liu, J. Modeling and Speed Control of the Underwater Wheeled Vehicle Flexible Towing System. Math. Probl. Eng. 2019, 2019, 3943472. [Google Scholar] [CrossRef]
- Liu, G.; Shen, X.; Xu, G.; Xun, S.; Chen, Z. Motion control of an underwater wheeled vehicle in constrained pond. In Proceedings of the OCEANS 2017-Anchorage, Anchorage, AK, USA, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Xun, S.; Liu, G.; Guo, R.; Xu, G. Research on Constrained Motion Control of Underwater Flexible Driven Vehicle. Mach. Electron. 2018, 36, 27–32. [Google Scholar]
- Zhao, Y.; Xia, Y.; Chen, Y.; Xu, G.H. A speed control method for underwater vehicle under hydraulic flexible traction. J. Control Sci. Eng. 2015, 2015, 384105. [Google Scholar] [CrossRef]
- Xia, Y.; Xu, G.; Xu, K.; Chen, Y.; Xiang, X.; Ji, Z. Dynamics and control of underwater tension leg platform for diving and leveling. Ocean Eng. 2015, 109, 454–478. [Google Scholar] [CrossRef]
- Wang, X.; Cao, J.; Zhang, G.; Luo, Y.; Xu, W.; Yang, X. Design and Simulation Analysis of Cable Storage Winch in Cyclic Towing System. Mech. Eng. Autom. 2023, 3, 47–49. [Google Scholar]
- Chen, Y.; Zhang, L. Design of a Heavy-Duty Towing System for a Towing Tank. Mech. Electr. Eng. 2017, 34, 1004–1008. [Google Scholar]
- Chen, Y.; Lei, Y.; Zhang, L. Structural Design of Towing Tank Carriage. Mech. Electr. Eng. 2015, 32, 1586–1589+1594. [Google Scholar]
- Kang, H.; Yang, X.; Zhang, G.; Gong, X.; Yang, S. Design and Structural Simulation of Towing Tank Carriage System. Mech. Eng. Autom. 2020, 2, 37–39. [Google Scholar]
- Feng, H.; Sun, W.; Tang, G.; Wang, J.-J. Study on a novel two-part underwater towed system for near-surface towed vehicle test. Ocean Eng. 2022, 255, 111440. [Google Scholar] [CrossRef]
- Tian, Z.; He, H.; Zhou, Y. Modeling and Numerical Computation of the Longitudinal Non-Linear Dynamics of High-Speed Elevators. Appl. Sci. 2024, 14, 1821. [Google Scholar] [CrossRef]
- Liu, J. On the Calculation of Total Resistance in Ship Towing. China Water Transp. 2023, 3, 61–63. [Google Scholar] [CrossRef]
- Guo, Y.; Zhang, D.; Yang, X.; Feng, C.; Ge, S. Experimental research on effect of wire rope transverse vibration on friction transmission stability in a friction hoisting system. Tribol. Int. 2017, 115, 233–245. [Google Scholar] [CrossRef]
- Jia, X.; Guo, Y.; Liu, S.; Wang, Y. Simulation Study of Deepwater Deployment of the Functional Module of the Next-Generation Underwater Production System Based on ADAMS. Pet. Sci. Bull. 2019, 4, 174–183. [Google Scholar]








Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).