
Experimental Investigation of Free-Motion Task Implementation on a Serial Metamorphic Manipulator



Abstract
Featured Application
Abstract
1. Introduction
1.1. Recent Advances in Reconfigurable Robots and Challenges
1.2. Dynamic Performance Evaluation
1.3. Motivation and Contribution
- Assessing system modeling accuracy: This study provides insights into the accuracy of the proposed system model for SMMs. In order to test modeling accuracy, experimental validation is conducted to bridge the gap between theoretical predictions and real-world performance. Robot performance varies along the task path, necessitating the use of theoretical foundations and an accurate dynamic model to identify regions of higher and lower performance. This understanding is critical for the optimal configuration of task execution strategies and the precise tuning of controller parameters.
- Dynamic performance evaluation: Reconfiguration introduces additional variables that significantly affect kinematic and dynamic characteristics. The primary focus is to study the achieved performance along the free-motion task path execution for the optimized robot configurations. Optimized robot configurations should achieve higher efficiency in robot joints’ motions and achieve higher acceleration capabilities with reduced joint effort.
2. Preliminaries and Methodology
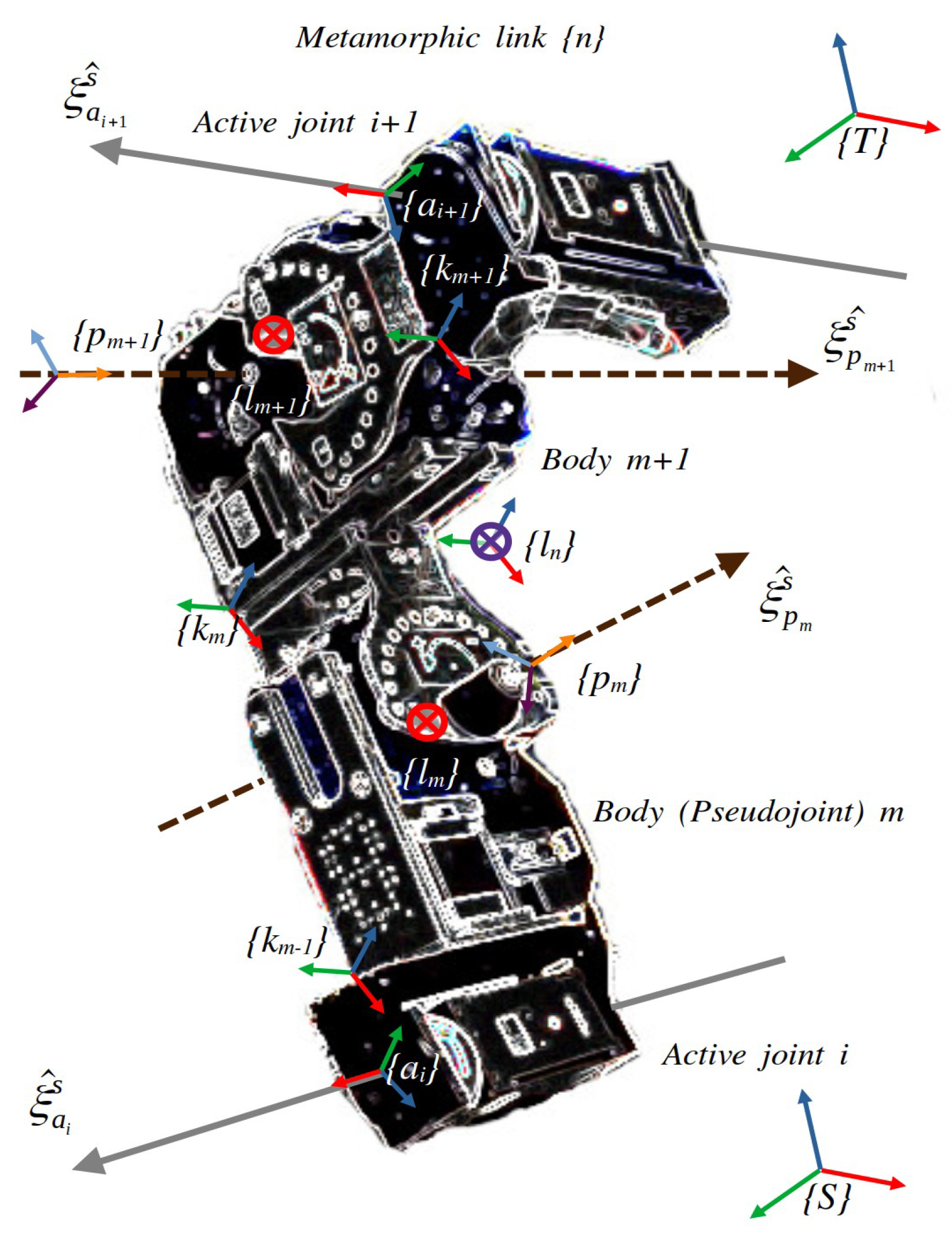
2.1. Dynamic Modeling of SMMs
2.2. Performance Evaluation
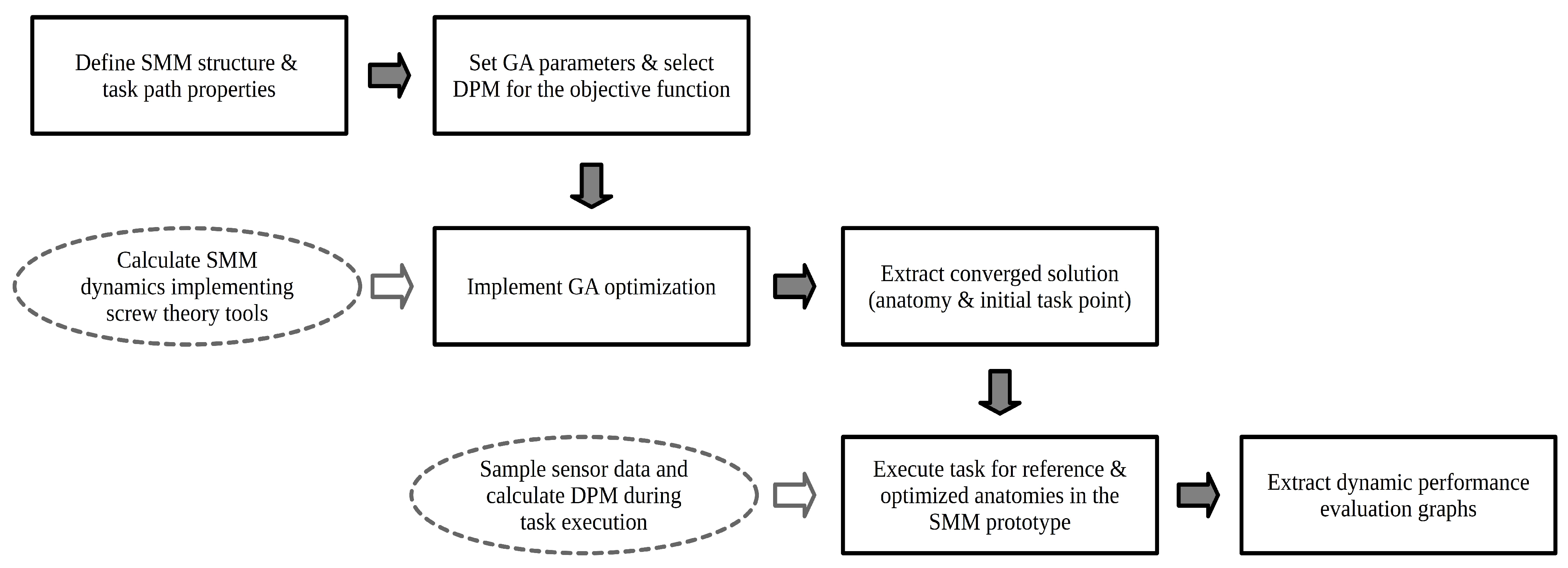
2.3. Methodology
3. Main Theoretical Results
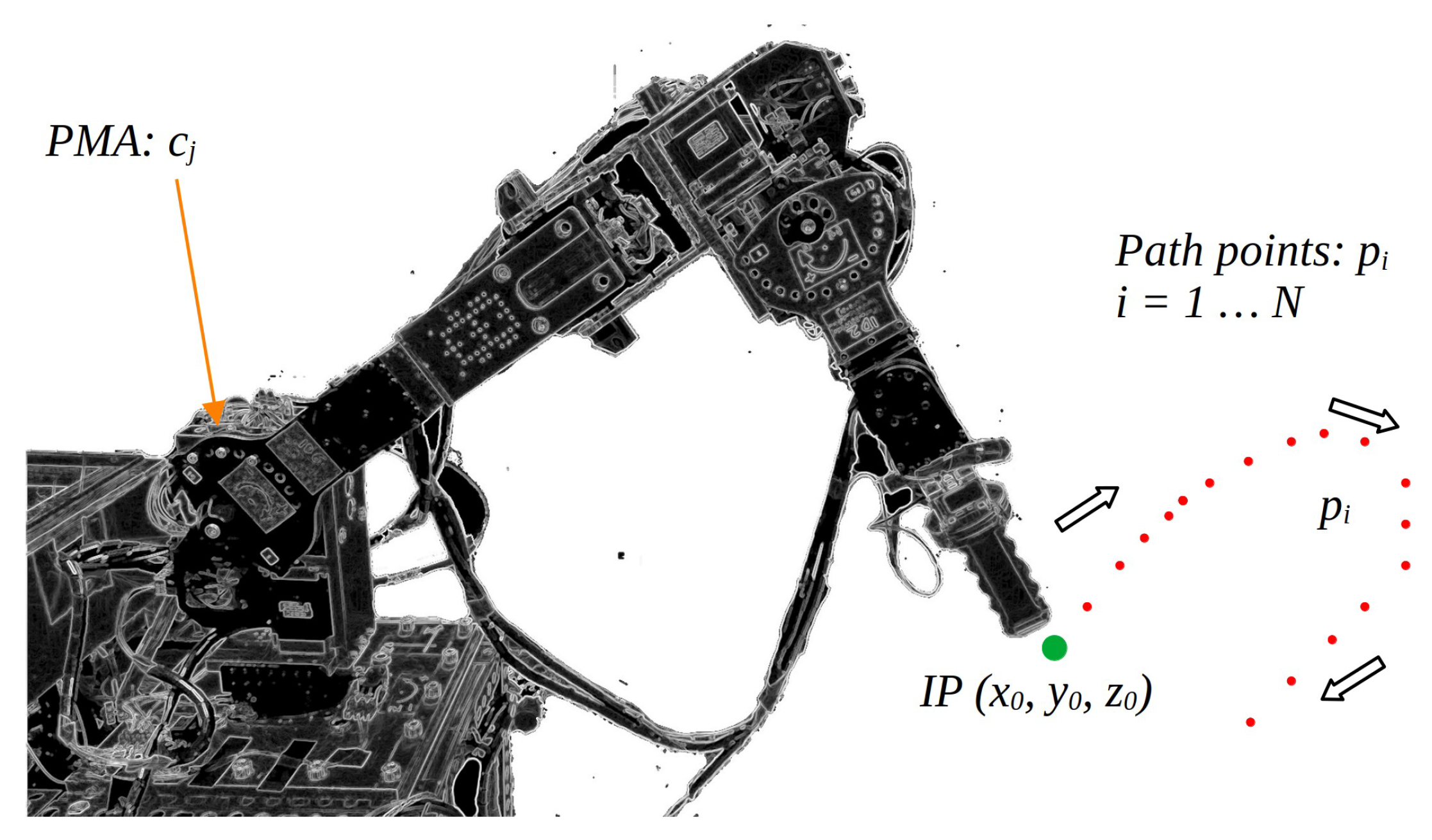
3.1. Task Paths
3.2. GA Optimization Results
3.3. Theoretical Validation of Dynamic Modeling
4. Experimental Case Study
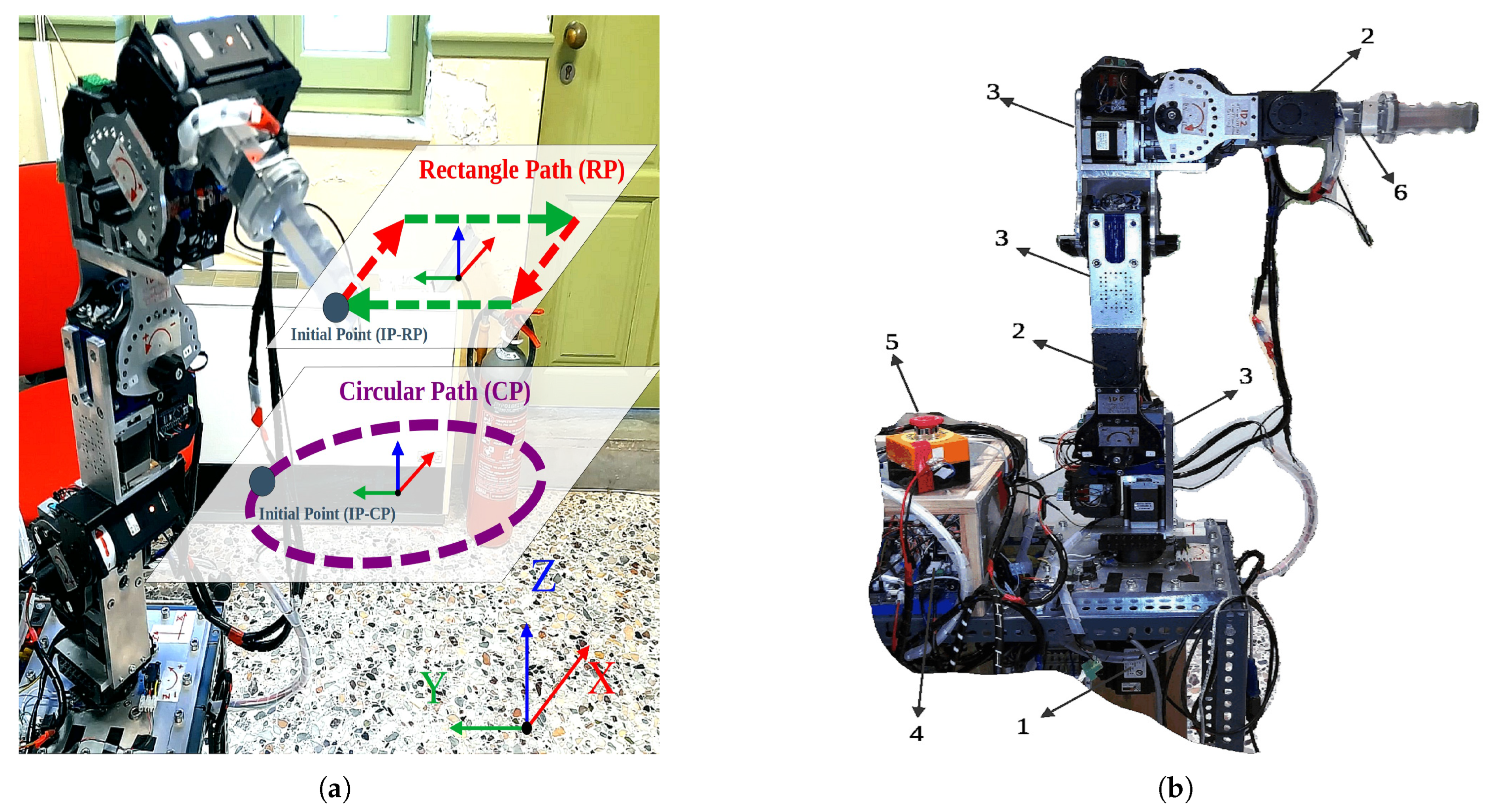
4.1. The SMM Prototype
4.2. Executed Task Paths
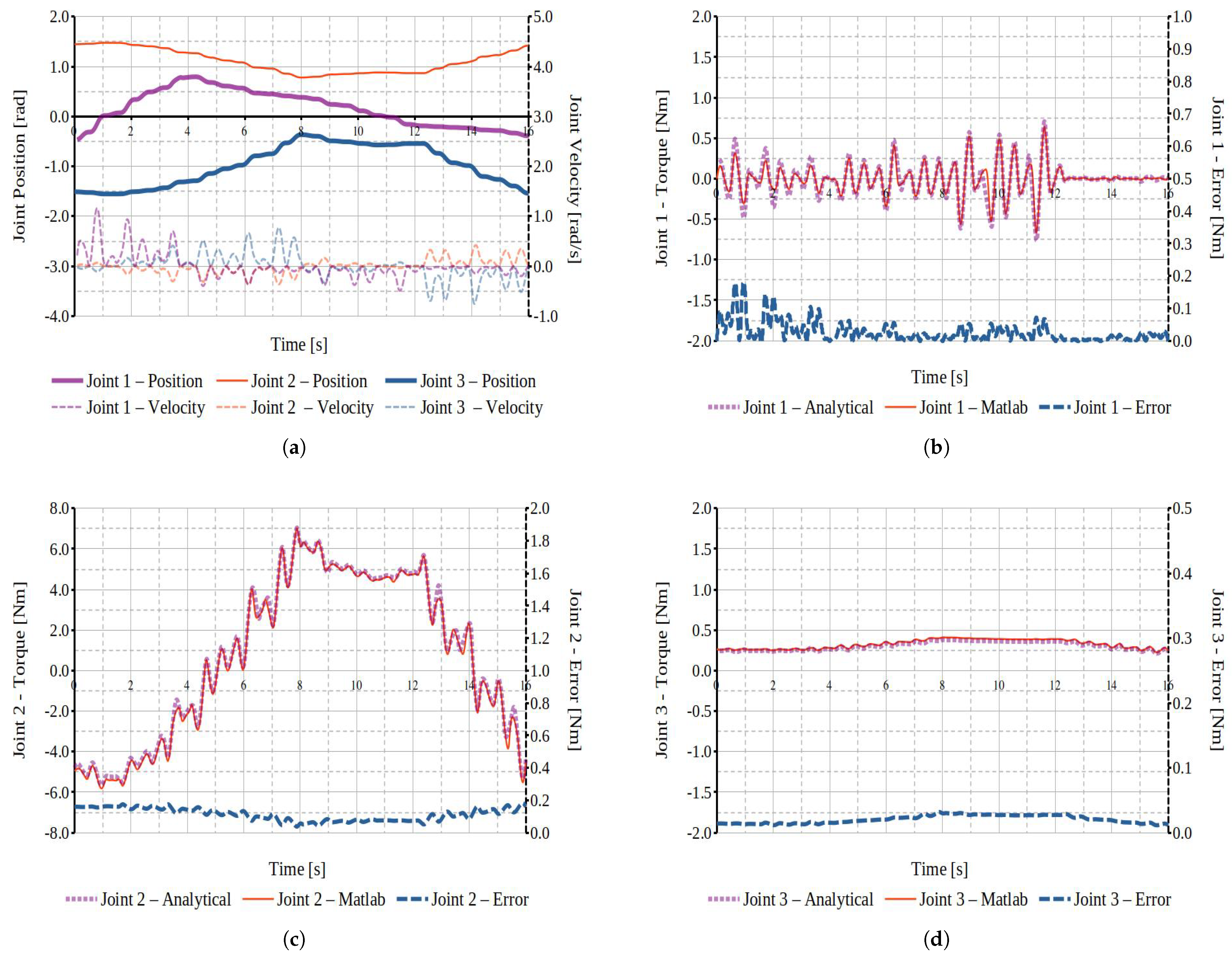
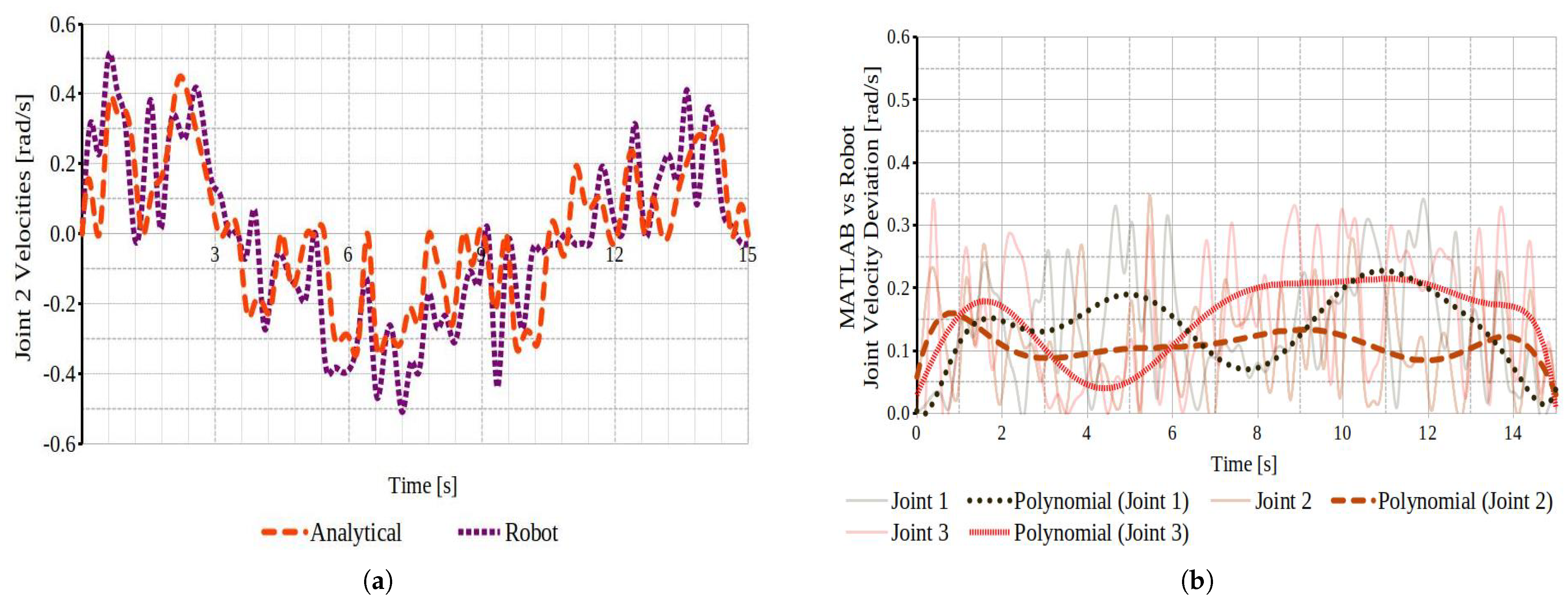
4.3. Experimental Validation of Dynamic Modeling
4.4. Dynamic Performance Evaluation
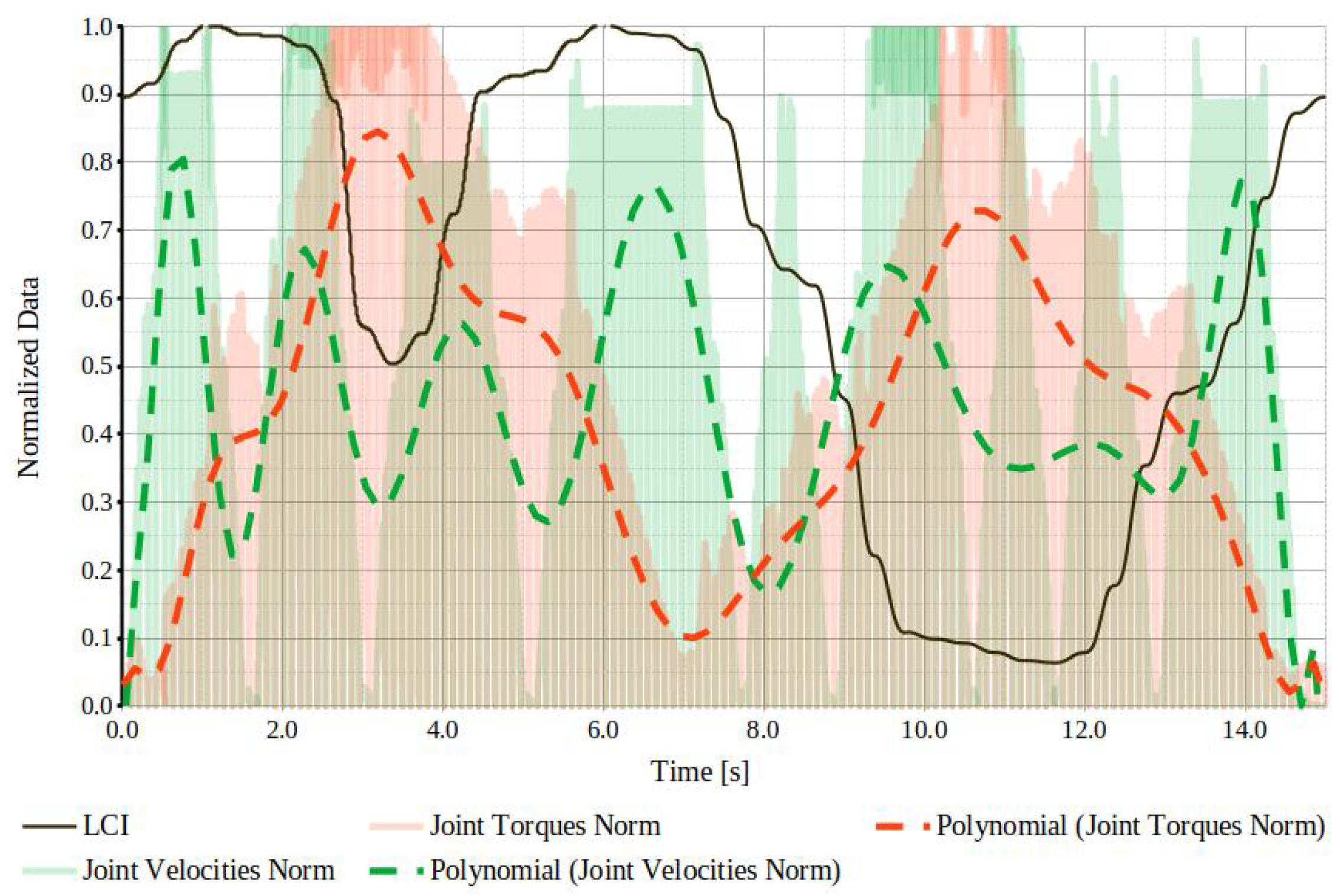
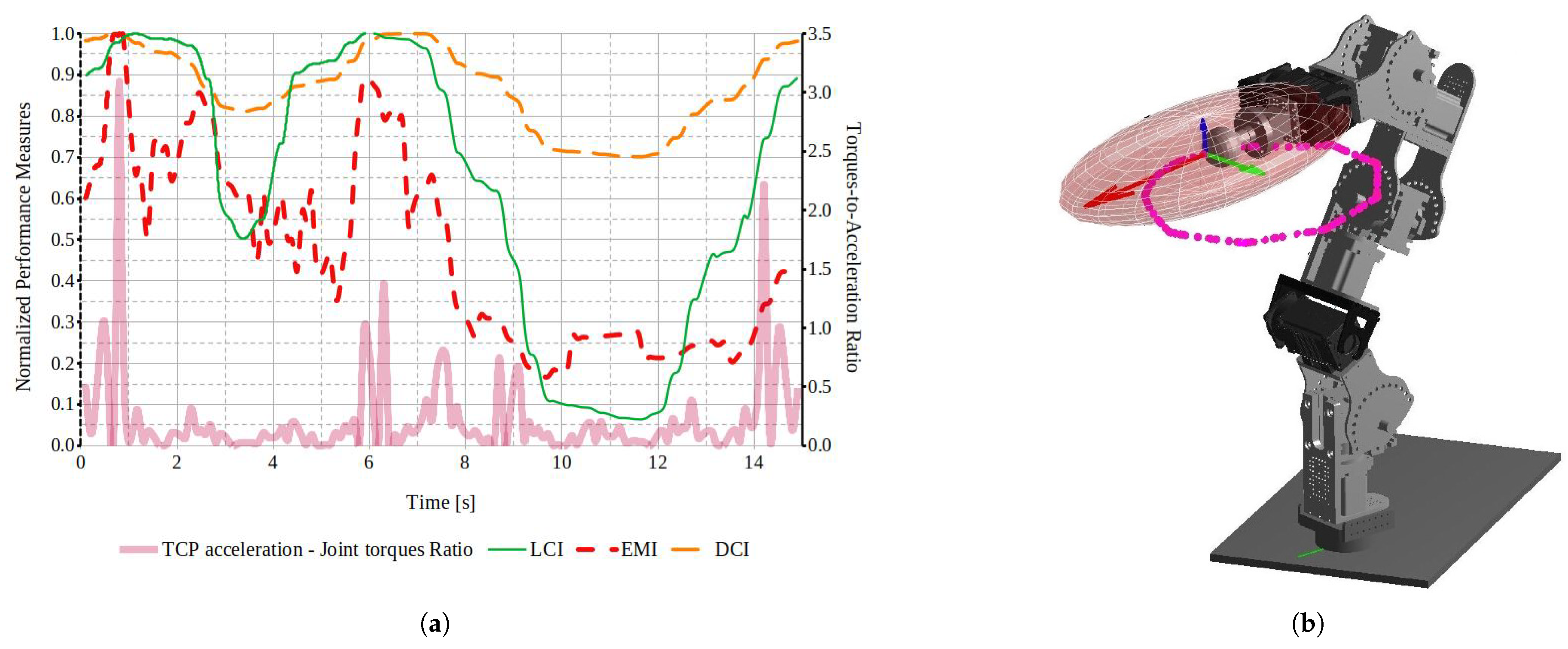
4.4.1. Optimizing Joint Torque to Velocity Output
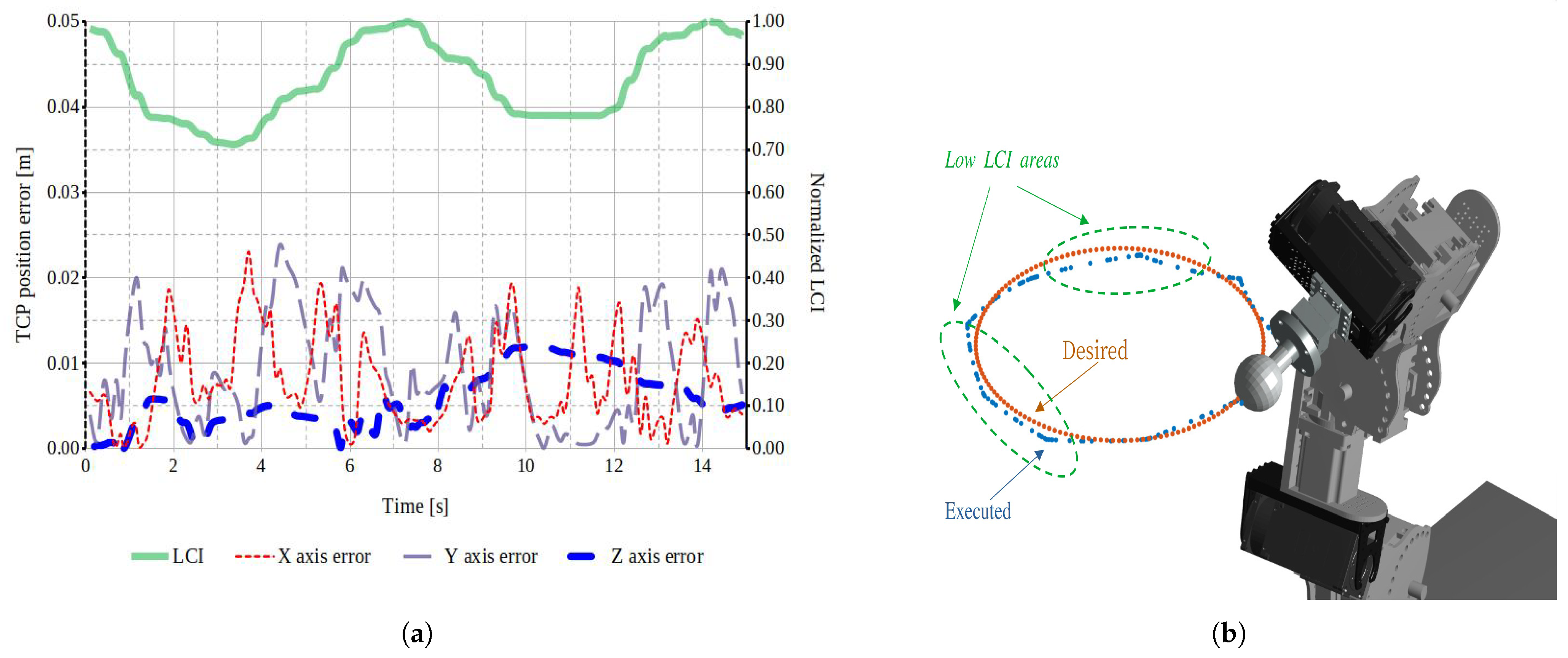
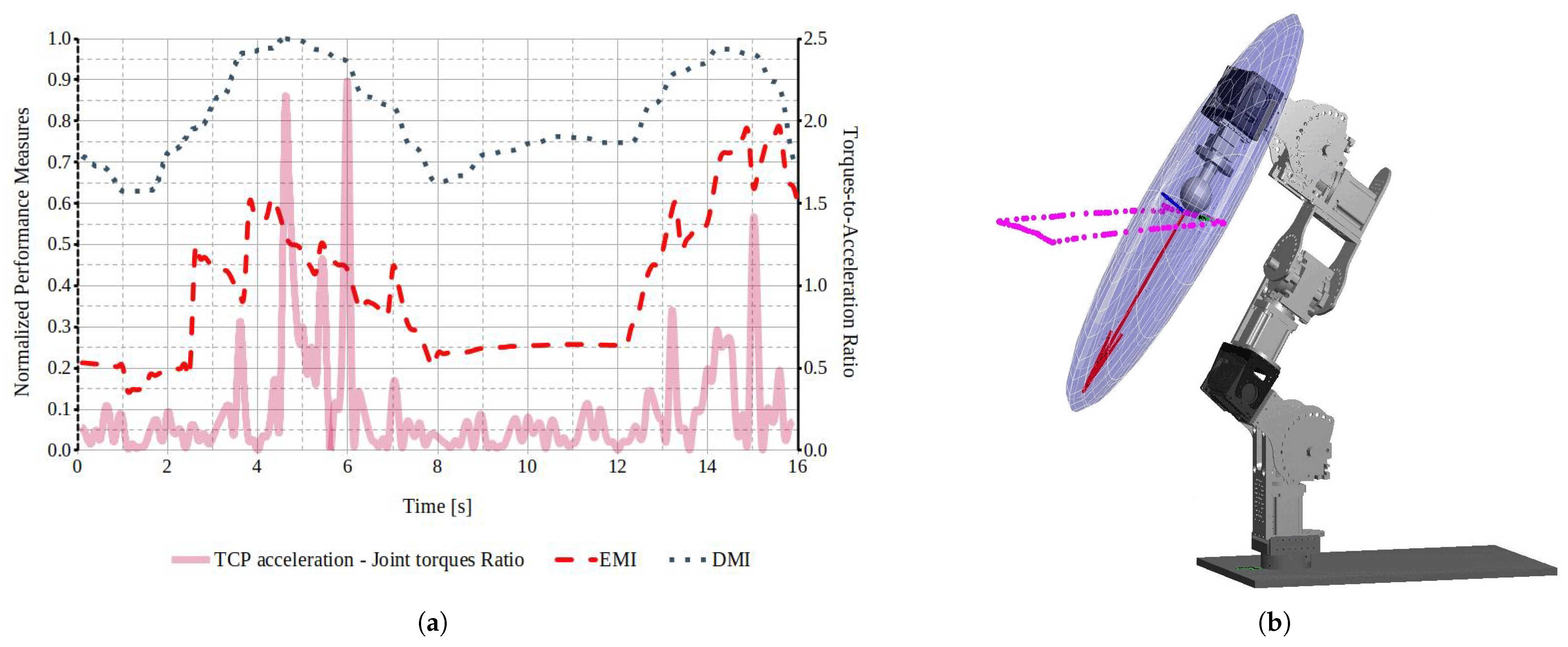
4.4.2. Optimizing End-Effector Translation Response
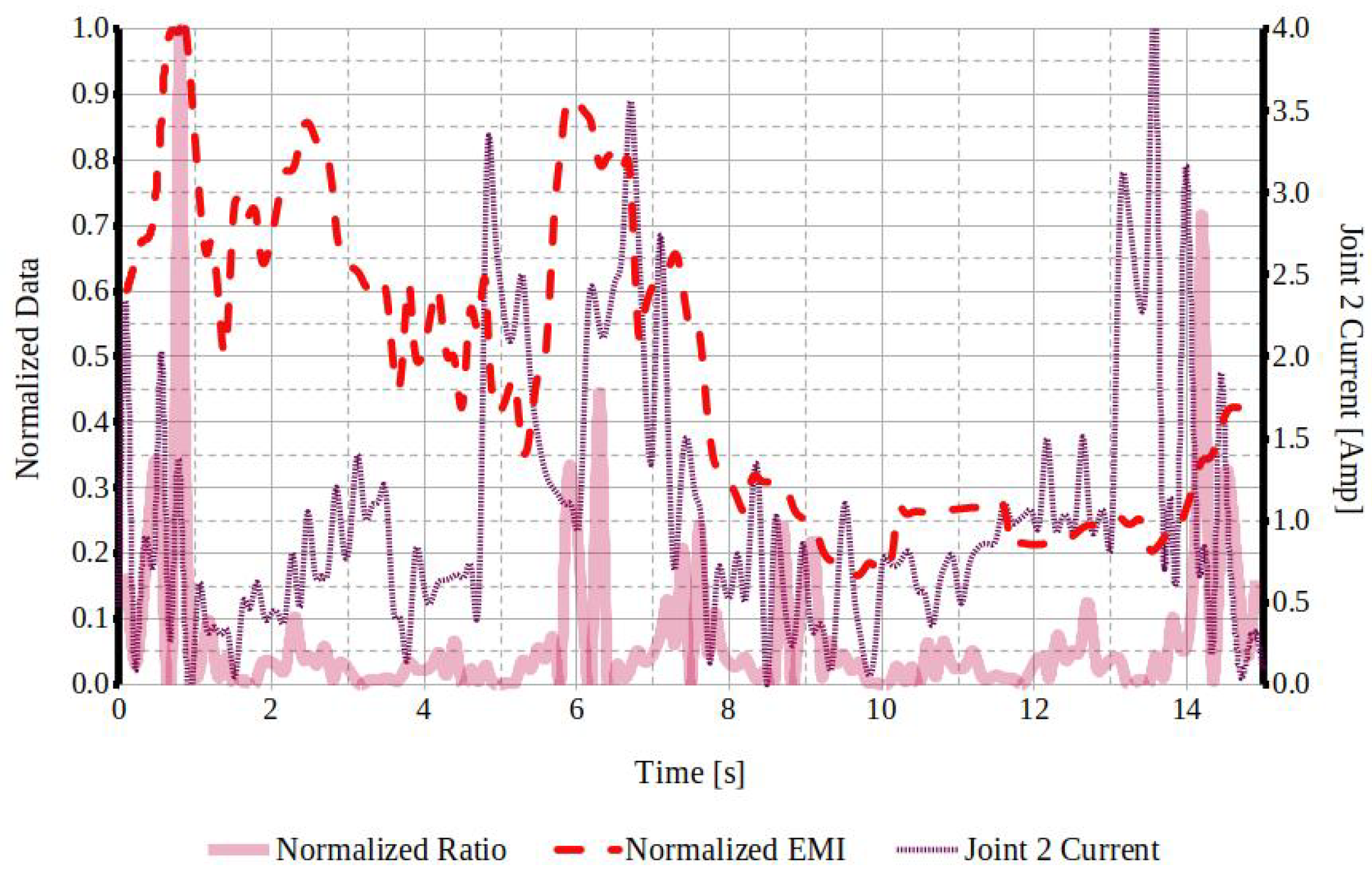
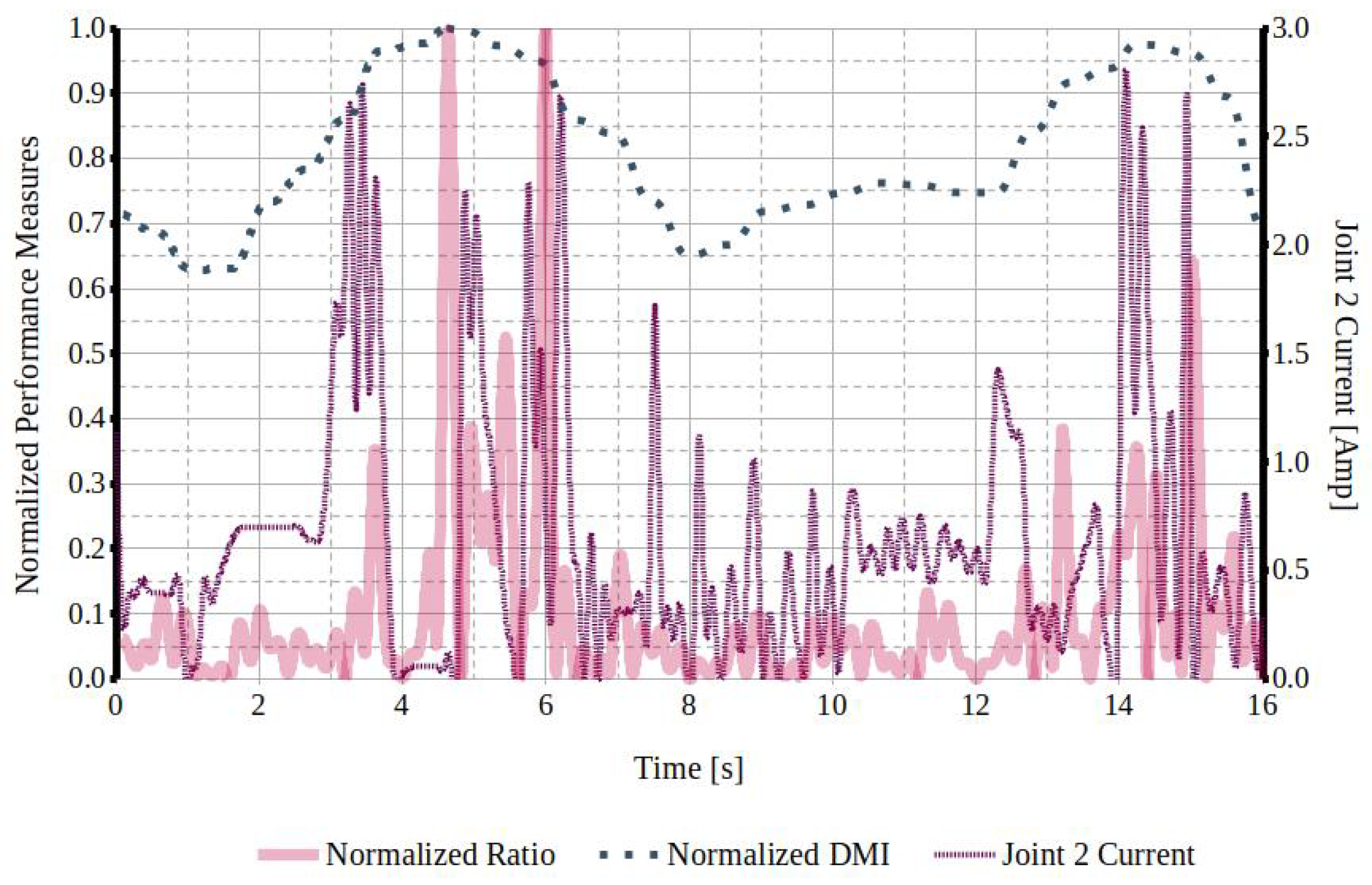
4.4.3. Joint Torque Controller Output
5. Conclusions and Future Work
- Modeling accuracy: Given the simplified dynamic model employed for this initial evaluation, the focus was on analyzing the system’s fundamental behavior under basic task conditions, including low end-effector speed and the absence of external forces or loads. Both theoretical and experimental validation results confirmed the adequacy of the proposed dynamic model, providing a reliable baseline for comparing simulation data with experimental findings. The theoretical analysis confirmed the model’s accuracy, while the experimental validation highlighted that unmodeled dynamics contributed to deviations in joint torques, though overall trends remained consistent. Additionally, systematic errors arising from the inherent inaccuracies and imperfections of the physical robot prototype were evident but did not alter the general representation of the system’s dynamic behavior. These findings underscore the utility of the simplified model as a foundational tool for understanding system dynamics and guiding future refinements in modeling and experimental validation.
- Dynamic performance evaluation: Various metrics were analyzed to assess their effectiveness in extracting accurate information about the robot’s actual behavior. The results of this study successfully identified robot structures that led to enhanced performance and optimized task execution, consistent with findings in the literature [13,15,18]. The results demonstrated the value of performance measures in identifying task segments with optimized performance and areas requiring improvement. Despite using a simplified dynamic model, the framework effectively correlated performance indices with trajectory accuracy, highlighting its utility for evaluating and refining control strategies in reconfigurable robotic systems. The results demonstrated that task-based optimization, which incorporated the robot’s dynamic properties, brought performance evaluations closer to real-world conditions. This approach provided a more accurate reflection of how modular reconfigurable robots performed in practice, offering significant improvements in task adaptability and precision.
- Controller performance: The implementation of simple PID joint position controllers with fixed gains to execute motion commands on the SMM prototype resulted in reduced positional accuracy, particularly in task segments with lower dynamic performance. While task optimization increased the torque-to-acceleration ratio, it also introduced counterproductive effects that must be addressed to enhance controller efficiency and overall performance. Elevated joint currents and current spikes observed in regions with high torque-to-acceleration ratios indicated significant dynamic load variations. These findings underscore the necessity for advanced trajectory optimization techniques and refined control system architectures to achieve improved dynamic performance and energy efficiency.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Romanov, A.M.; Yashunskiy, V.D.; Chiu, W.Y. A modular reconfigurable robot for future autonomous extraterrestrial missions. IEEE Access 2021, 9, 147809–147827. [Google Scholar] [CrossRef]
- Xu, W.; Han, L.; Wang, X.; Yuan, H. A wireless reconfigurable modular manipulator and its control system. Mechatronics 2021, 73, 102470. [Google Scholar] [CrossRef]
- Hong, S.; Choi, D.; Kang, S.; Lee, H.; Lee, W. Design of manually reconfigurable modular manipulator with three revolute joints and links. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 5210–5215. [Google Scholar] [CrossRef]
- Valente, A. Reconfigurable industrial robots—An integrated approach to design the joint and link modules and configure the robot manipulator. In Advances in Reconfigurable Mechanisms and Robots II; Ding, X., Kong, X., Dai, J., Eds.; Springer: Cham, Switzerland, 2016. [Google Scholar] [CrossRef]
- Liu, Y.; Xu, H.; Geng, C.; Chen, G. A modular manipulator for industrial applications: Design and implement. In Proceedings of the 2nd International Conference on Robotics and Automation Engineering (ICRAE), Shanghai, China, 29–31 December 2017; pp. 331–335. [Google Scholar] [CrossRef]
- Yun, A.; Moon, D.; Ha, J.; Kang, S.; Lee, W. ModMan: An Advanced Reconfigurable Manipulator System with Genderless Connector and Automatic Kinematic Modeling Algorithm. IEEE Robot. Autom. Lett. 2020, 5, 4225–4232. [Google Scholar] [CrossRef]
- Wang, Y.; Zhao, C.; Mei, D.; Tang, G.; Zhang, L.; Zhu, D. Structural Design and Position Tracking of the Reconfigurable SCARA Robot by the Pre-Filter AFE PID Controller. Appl. Sci. 2022, 12, 1626. [Google Scholar] [CrossRef]
- Kang, P.; Han, L.; Xu, W.; Wang, P.; Yang, G. Mobile Robot Manipulation System with a Reconfigurable Robotic Arm: Design and Experiment. In Proceedings of the 2019 IEEE International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2378–2383. [Google Scholar] [CrossRef]
- Ye, L.; Liu, H.; Wang, X.; Liang, B.; Yuan, B. Design and control of a robotic system with legs, wheels, and a reconfigurable arm. IET Cyber-Syst. Robot. 2022, 4, 313–321. [Google Scholar] [CrossRef]
- Romanov, A.M.; Romanov, M.P.; Manko, S.V.; Volkova, M.A.; Chiu, W.Y.; Ma, H.P.; Chiu, K.Y. Modular reconfigurable robot distributed computing system for tracking multiple objects. IEEE Syst. J. 2020, 15, 802–813. [Google Scholar] [CrossRef]
- Zhang, T.; Du, Q.; Yang, G.; Wang, C.; Chen, C.Y.; Zhang, C.; Chen, S.; Fang, Z. Assembly Configuration Representation and Kinematic Modeling for Modular Reconfigurable Robots Based on Graph Theory. Symmetry 2022, 14, 433. [Google Scholar] [CrossRef]
- Althoff, M.; Giusti, A.; Liu, S.B.; Pereira, A. Effortless creation of safe robots from modules through self-programming and self-verification. Sci. Robot. 2019, 4, 1924. [Google Scholar] [CrossRef]
- Chitre, N.; Dogra, A.; Singla, E. Optimal synthesis of reconfigurable manipulators for robotic assistance in vertical farming. Robotica 2023, 41, 2283–2297. [Google Scholar] [CrossRef]
- Ding, Z.; Tang, H.; Wan, H.; Zhang, C.; Sun, R. A Modular Robotic Arm Configuration Design Method Based on Double DQN with Prioritized Experience Replay. Symmetry 2024, 16, 714. [Google Scholar] [CrossRef]
- Whitman, J.; Choset, H. Task-specific manipulator design and trajectory synthesis. IEEE Robot. Autom. Lett. 2018, 4, 301–308. [Google Scholar] [CrossRef]
- Valsamos, C.; Stravopodis, N.; Moulianitis, V.; Apsragathos, N.A. Metamorphic Manipulators. In Robot Design Mechanisms and Machine Science; Carbone, G., Laribi, M.A., Eds.; Springer: Cham, Switzerland, 2023. [Google Scholar] [CrossRef]
- Dogra, A.; Mahna, S.; Padhee, S.S.; Singla, E. Unified modeling of unconventional modular and reconfigurable manipulation system. Robot. Comput.-Integr. Manuf. 2022, 78, 102385. [Google Scholar] [CrossRef]
- Liu, S.B.; Althoff, M. Optimizing performance in automation through modular robots. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 4044–4050. [Google Scholar] [CrossRef]
- Nainer, C.; Feder, M.; Giusti, A. Automatic generation of kinematics and dynamics model descriptions for modular reconfigurable robot manipulators. In Proceedings of the IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 45–52. [Google Scholar] [CrossRef]
- Nainer, C.; Giusti, A. Automatically deployable robust control of modular reconfigurable robot manipulators. IEEE Robot. Autom. Lett. 2022, 7, 5286–5293. [Google Scholar] [CrossRef]
- Xia, H.; Guo, P. Sliding mode-based online fault compensation control for modular reconfigurable robots through adaptive dynamic programming. Complex Intell. Syst. 2022, 8, 1963–1973. [Google Scholar] [CrossRef]
- Ma, B.; Yao, X.; An, T. Model free position-force control of environmental constrained reconfigurable manipulators based on adaptive dynamic programming. Artif. Intell. 2023, 56, 3143–3171. [Google Scholar] [CrossRef]
- Ma, B. Adaptive dynamic programming-based fault-tolerant position-force control of constrained reconfigurable manipulators. IEEE Access 2020, 8, 183286–183299. [Google Scholar] [CrossRef]
- Song, R.; Liu, L.; Xu, Z. Adaptive dynamic event-triggered control for constrained modular reconfigurable robot. Knowl.-Based Syst. 2022, 254, 109624. [Google Scholar] [CrossRef]
- Yoshikawa, T. Dynamic manipulability of robot manipulators. Trans. Soc. Instrum. Control Eng. 1985, 21, 970–975. [Google Scholar] [CrossRef]
- Khatib, O. Inertial properties in robotic manipulation: An object-level framework. Int. J. Robot. Res. 1995, 14, 19–36. [Google Scholar] [CrossRef]
- Ma, O.; Angeles, J. Optimum design of manipulators under dynamic isotropy conditions. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Atlanta, GA, USA, 2–6 May 1993; pp. 470–475. [Google Scholar]
- Stravopodis, N.; Moulianitis, V.C. Rectilinear tasks optimization of a modular serial metamorphic manipulator. J. Mech. Robot. 2021, 13, 011001. [Google Scholar] [CrossRef]
- Stravopodis, N.; Valsamos, C.; Moulianitis, V.C. Experimental Verification of Optimized Anatomies on a Serial Metamorphic Manipulator. Sensors 2022, 22, 918. [Google Scholar] [CrossRef] [PubMed]
- Stravopodis, N.; Moulianitis, V.C. Serial metamorphic manipulator dynamics formulation implementing screw theory tools. ASME Lett. Dyn. Syst. Control 2024, 22, 041006. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Anatomies | ID | IP Cartesian Coordinates [m] | Pseudojoints’ Angles [rad] |
|---|---|---|---|
| Reference | 0 | - | |
| Optimized EMI CP | 1 | ||
| Optimized LCI CP | 2 | ||
| Optimized LCI RP | 3 |
| Performance Area | Optimized (ID:2) | Reference (ID:0) |
|---|---|---|
| Best LCI score along the task path | 66% | 34% |
| Lower torques norm along the task path | 74% | 26% |
| Maximum torque norm [Nm] | 7.4 | 16.0 |
| Median torque norm [Nm] | 2.86 | 4.86 |
| Median velocity norm [rad/s] | 0.27 | 0.29 |
| Median torque-norm-to-velocity-norm ratio | 10.81 | 16.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stravopodis, N.; Moulianitis, V. Experimental Investigation of Free-Motion Task Implementation on a Serial Metamorphic Manipulator. Appl. Sci. 2024, 14, 11265. https://doi.org/10.3390/app142311265
Stravopodis N, Moulianitis V. Experimental Investigation of Free-Motion Task Implementation on a Serial Metamorphic Manipulator. Applied Sciences. 2024; 14(23):11265. https://doi.org/10.3390/app142311265
Chicago/Turabian StyleStravopodis, Nikolaos, and Vassilis Moulianitis. 2024. "Experimental Investigation of Free-Motion Task Implementation on a Serial Metamorphic Manipulator" Applied Sciences 14, no. 23: 11265. https://doi.org/10.3390/app142311265
APA StyleStravopodis, N., & Moulianitis, V. (2024). Experimental Investigation of Free-Motion Task Implementation on a Serial Metamorphic Manipulator. Applied Sciences, 14(23), 11265. https://doi.org/10.3390/app142311265