
Study on Corrosion Monitoring of Reinforced Concrete Based on Longitudinal Guided Ultrasonic Waves


Abstract
:1. Introduction
2. Theoretical Background
2.1. Corrosion Process Model
- (1)
- The concrete surrounding the reinforcement is a thick-walled cylinder with its wall thickness equal to the cover thickness.
- (2)
- The thickness of the corrosion products around the reinforcement is the same, that is, the reinforcement is uniformly corroded, and the pressure exerted by the corrosion products on the concrete around the reinforcement is uniform.
- (3)
- The effects of external factors are not taken into account in the calculations; only the expansion of the corrosion products induced by stresses and strains is considered.
- (1)
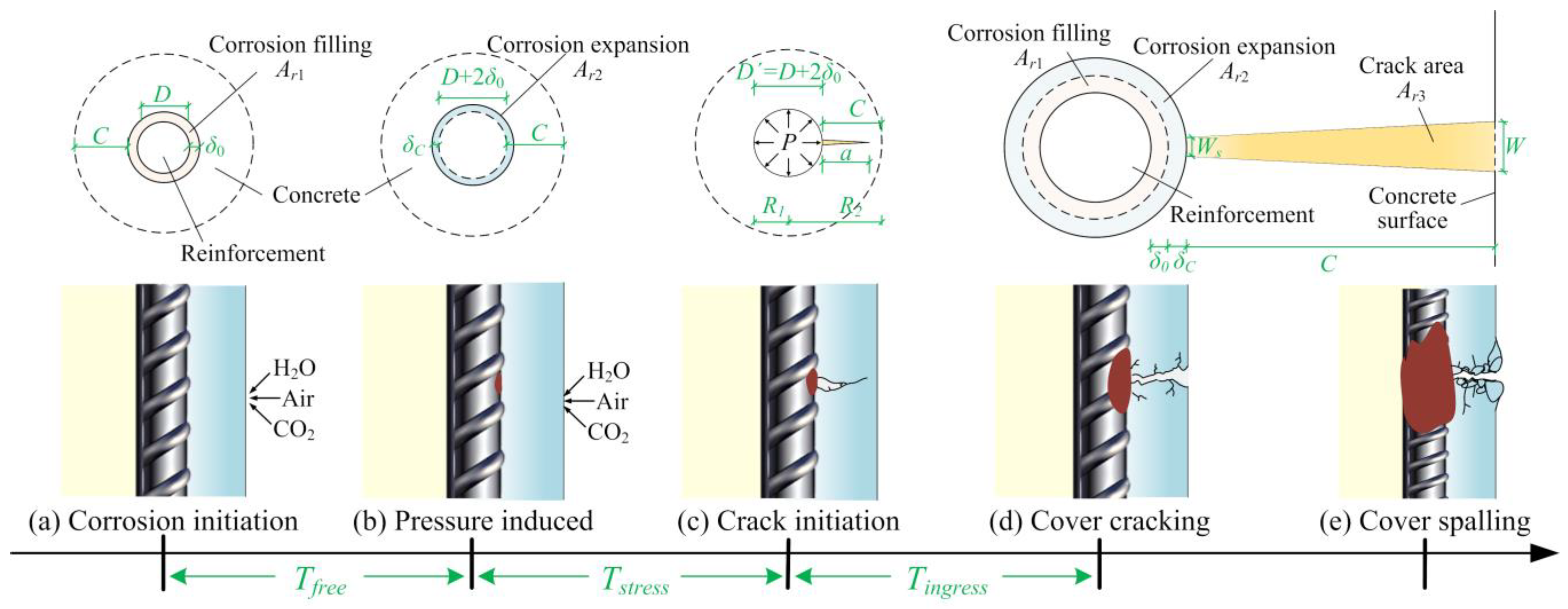
- Tfree interval (determined by the Ar1 surface): as shown in Figure 1a, corrosion products do not induce pressure on the concrete at the beginning of reinforcement corrosion until the porous zone (δ0) is filled with corrosion products.
- (2)
- Tstress interval (associated with the Ar2 surface): Corrosion products gradually penetrate into the concrete and densify the transition zone at the interface between the reinforcement and the concrete. Once the corrosion products fill the porous zone, they exert pressure on the surrounding concrete (Figure 1b). When the pressure is so high that the concrete cannot withstand it, initial cracks will develop in the concrete, as shown in Figure 1c.
- (3)
- Tingress interval (corresponding to the Ar3 surface): When initial cracks induced by internal pressure appear in the concrete, corrosion continues to expand and reduce the cross-section of the reinforcement. The corrosion products accumulated in the cracks will further lead to cover cracking, as shown in Figure 1d.
2.2. Frequency Dispersion Characteristics
3. Finite Element Simulation of Corroded Reinforcement
3.1. Finite Element Model
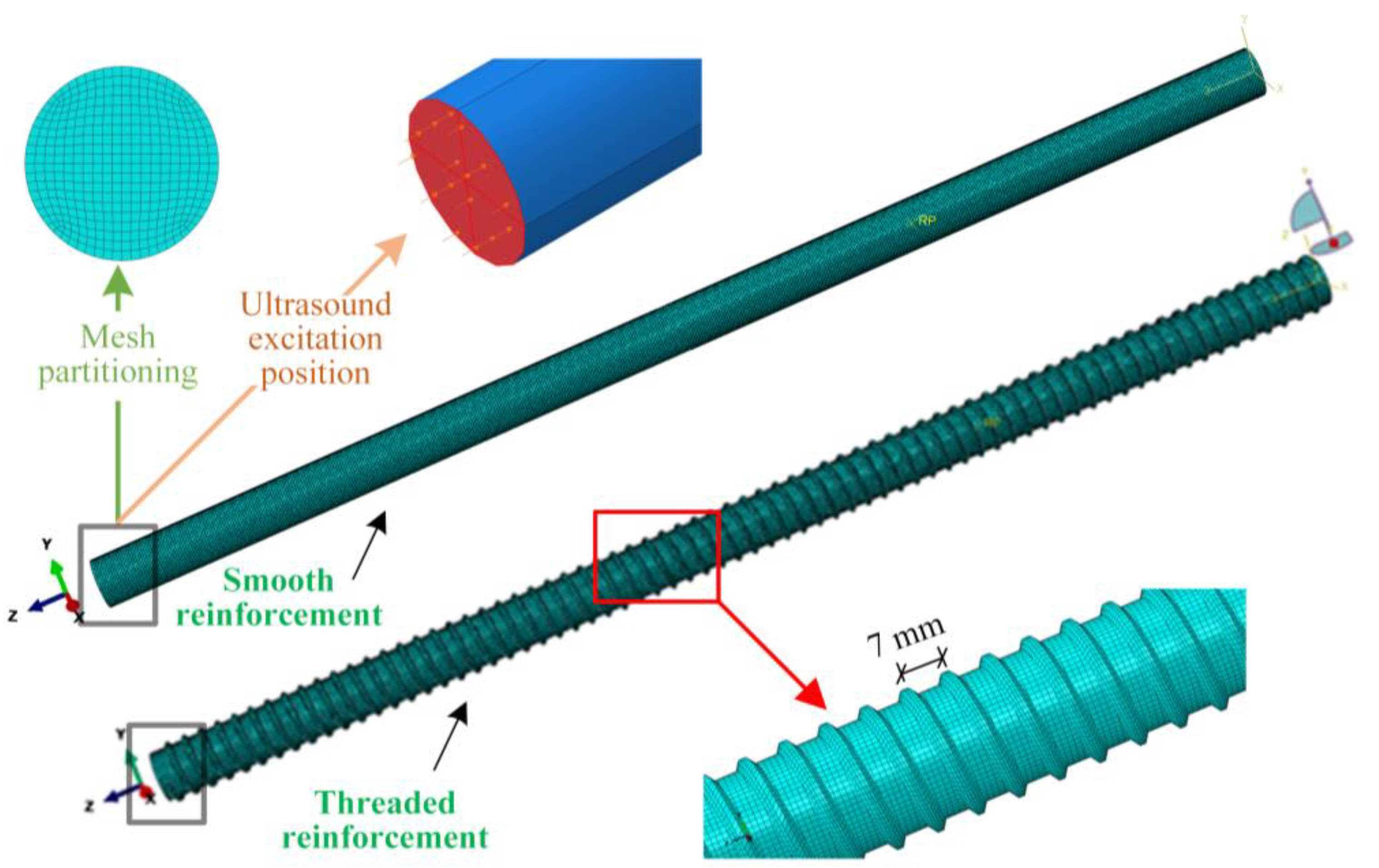
3.1.1. Model Establishment
3.1.2. Effects of Reinforcement Corrugation
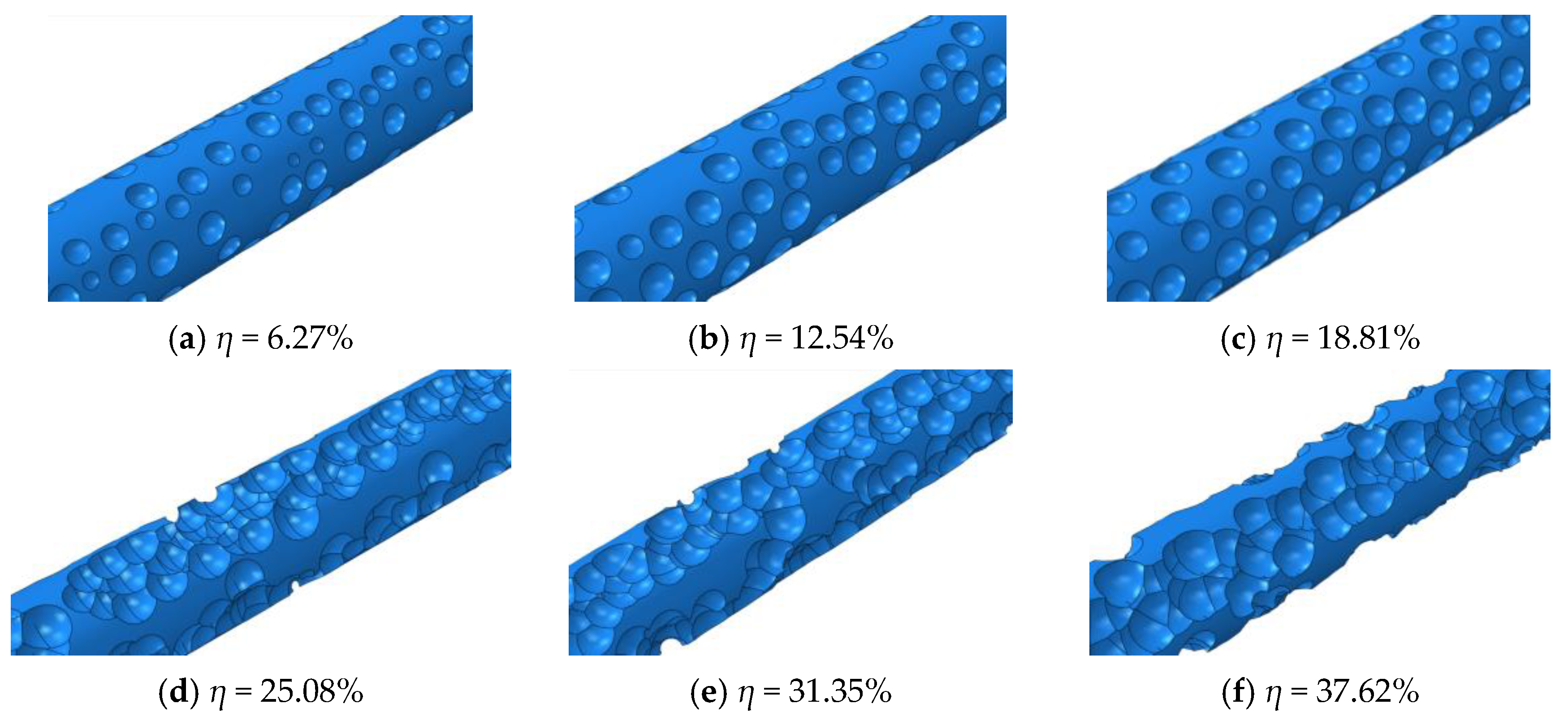
3.1.3. Simulation Method for Random Corrosion Pits on Reinforcement Surfaces
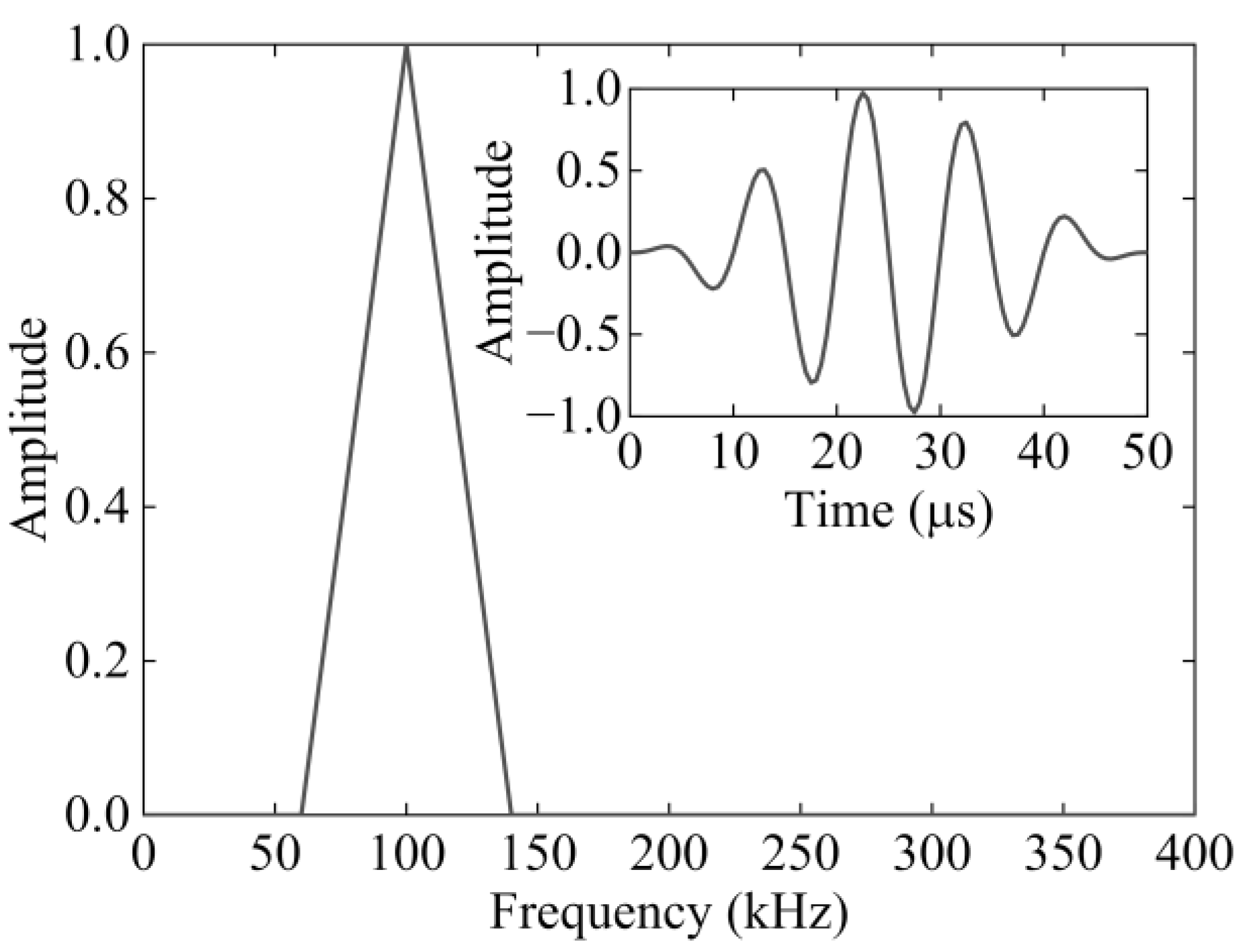
3.1.4. Determination of Excitation Frequency
3.2. Results of Finite Element Simulation
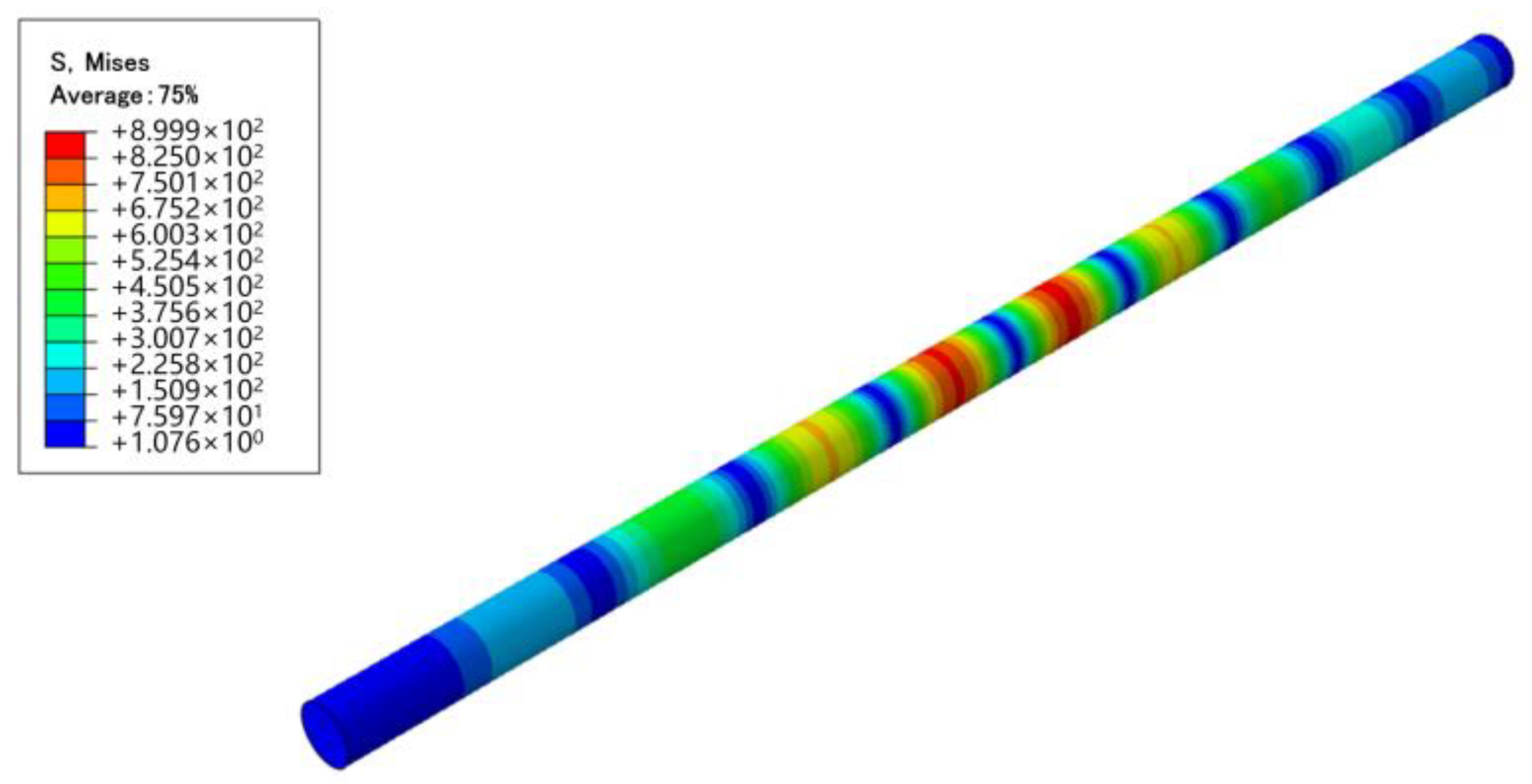
3.2.1. GUW Signals
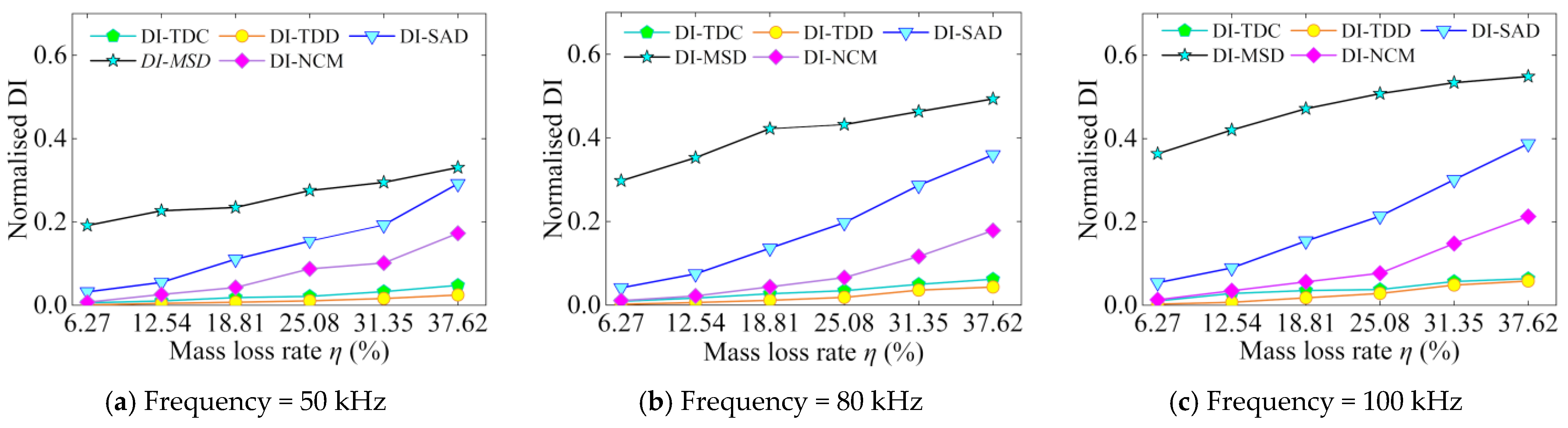
3.2.2. Damage Index
- (1)
- DI-TDC
- (2)
- DI-TDD
- (3)
- DI-SAD
- (4)
- DI-MSD
- (5)
- DI-NCM
4. Testing of Corroded Reinforcement
4.1. Testing Procedures
4.2. Test Results for Bare Reinforcement
4.2.1. Mass Loss Rate of Reinforcement
4.2.2. GUW Signals and DI-SAD of Reinforcement
4.3. Test Results for RC
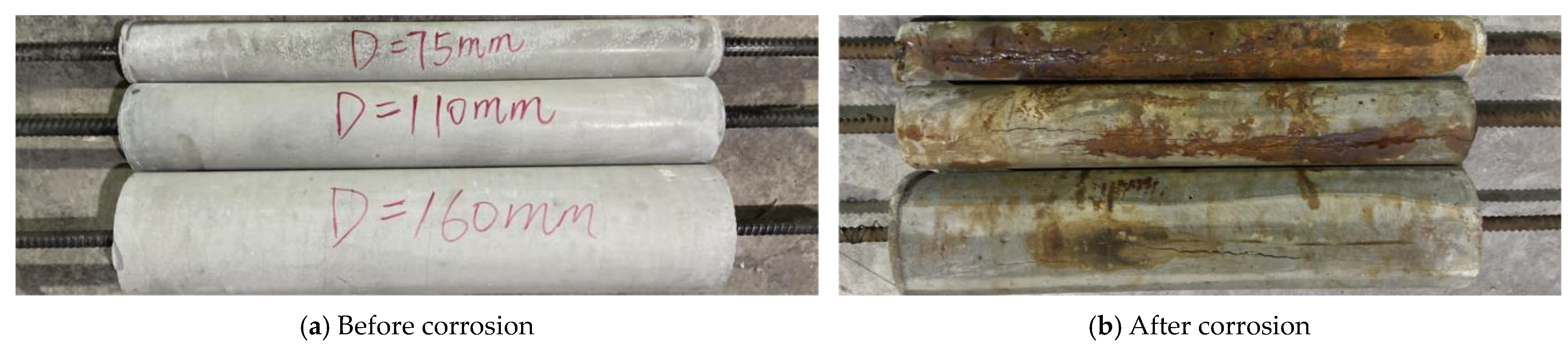
4.3.1. Test Phenomenon of RC
4.3.2. Mass Loss Rate of RC
4.3.3. GUW Signals and DI-SAD of RC
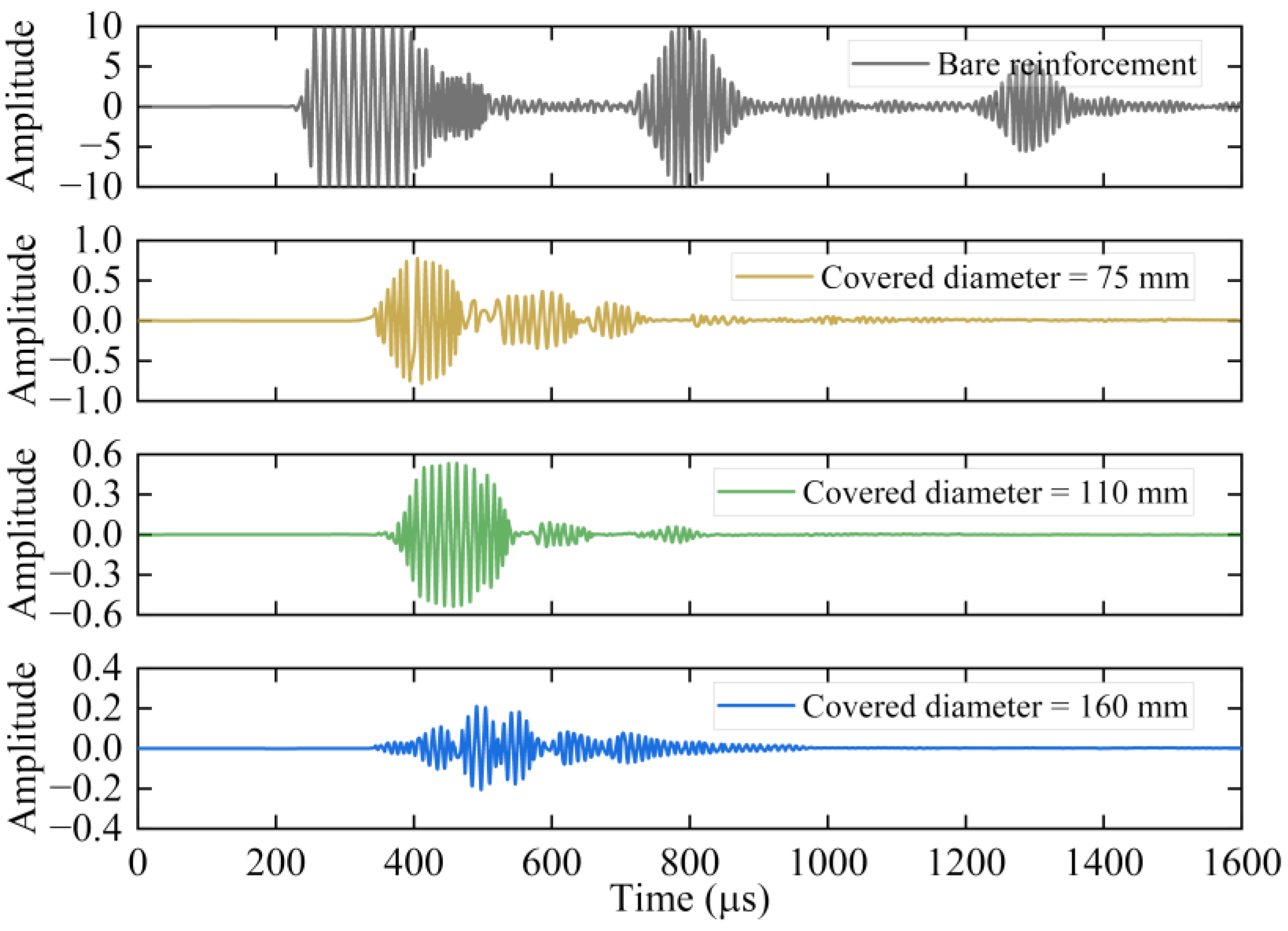
- (1)
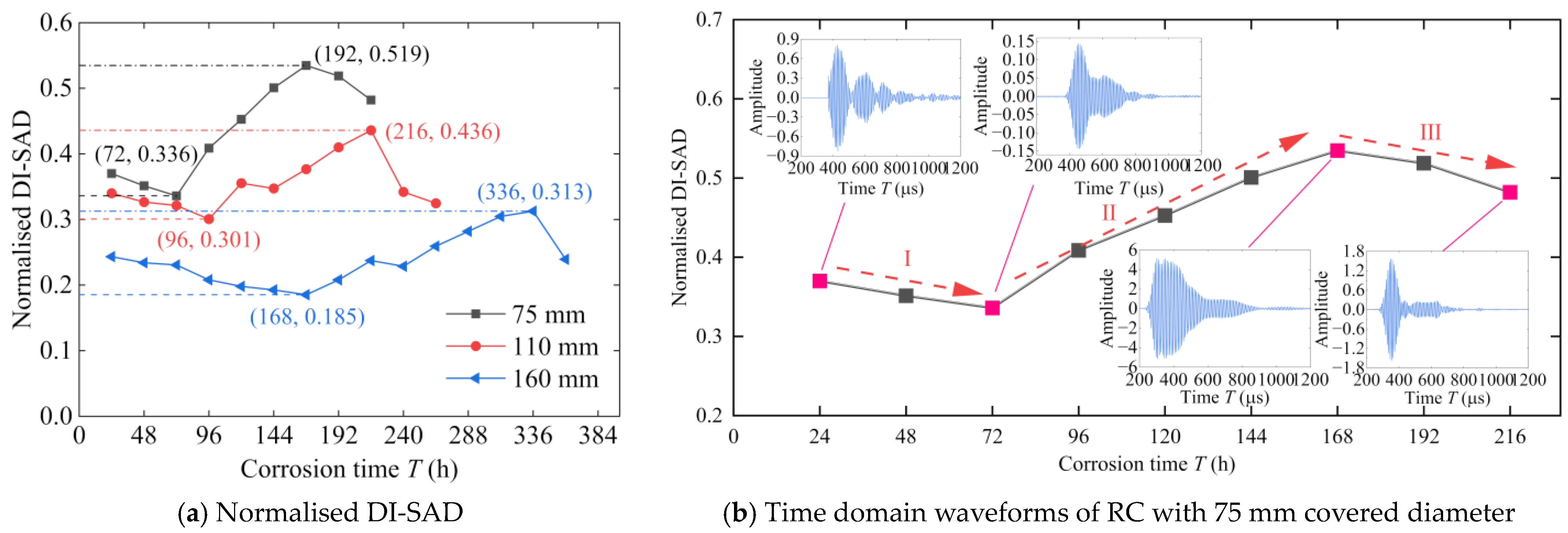
- The amplitude of the GUW signal decreases as the covered thickness increases, and the more signal energy is leaked. The amplitudes in the reinforcement bars with the 75, 110, and 160 mm covered diameters are 1/19, 1/28, and 1/70 of those in the bare reinforcement, respectively.
- (2)
- With the increase in the covered thickness, the arrival time increases and the wave velocity decreases. The arrival time of the signal in the bare reinforcement is 292 μs, whereas the corresponding arrival times are 405, 462, and 491 μs for the reinforcements with 75, 110, and 160 mm covered diameters, respectively.
- (3)
- The mode components in the signals are increased and the signals are complex. Ma et al. [28] pointed out that on the one hand, due to the small signal amplitude, the signal-to-noise ratio is lower and more interfered with by noise; on the other hand, the modal components of the GUW signals are more complex in the composite reinforcement–concrete waveguide medium.
- (I)
- The first stage is the initial stage of reinforcement corrosion, which is characterized by a decrease in the amplitude of the GUWs. At this stage, the corrosion products are slowly filled in the pores of the concrete around the reinforcement, which does not cause the internal cracking of the concrete. Due to the filling of the corrosion products, the contact between the reinforcement and concrete is closer, and more GUW energy is leaked from the reinforcement to the concrete, making the amplitude decrease continuously.
- (II)
- The second stage is the development stage of the internal cracks in the concrete. After the corrosion products fill the pores, their volume continues to increase, and the resulting rust expansion pressure causes cracks to begin to develop within the concrete when the concrete stresses reach the tensile strength. The bond failure between the reinforcement and concrete leads to the gradual decrease in the GUW energy leaked into the concrete, so the amplitude of the GUWs propagating along the reinforcement tends to increase.
- (III)
- The third stage is the development stage of the concrete surface cracks. As the cracks within the concrete continue to extend and expand, cracks appear on the concrete surface. Corrosive products on the reinforcement surface seep out along the cracks, while the corrosion solution flows to the reinforcement surface along the cracks. Since the acoustic impedance of the liquid is much larger than that of the metal material, the amplitude of the GUWs propagating in the reinforcement decreases rapidly.
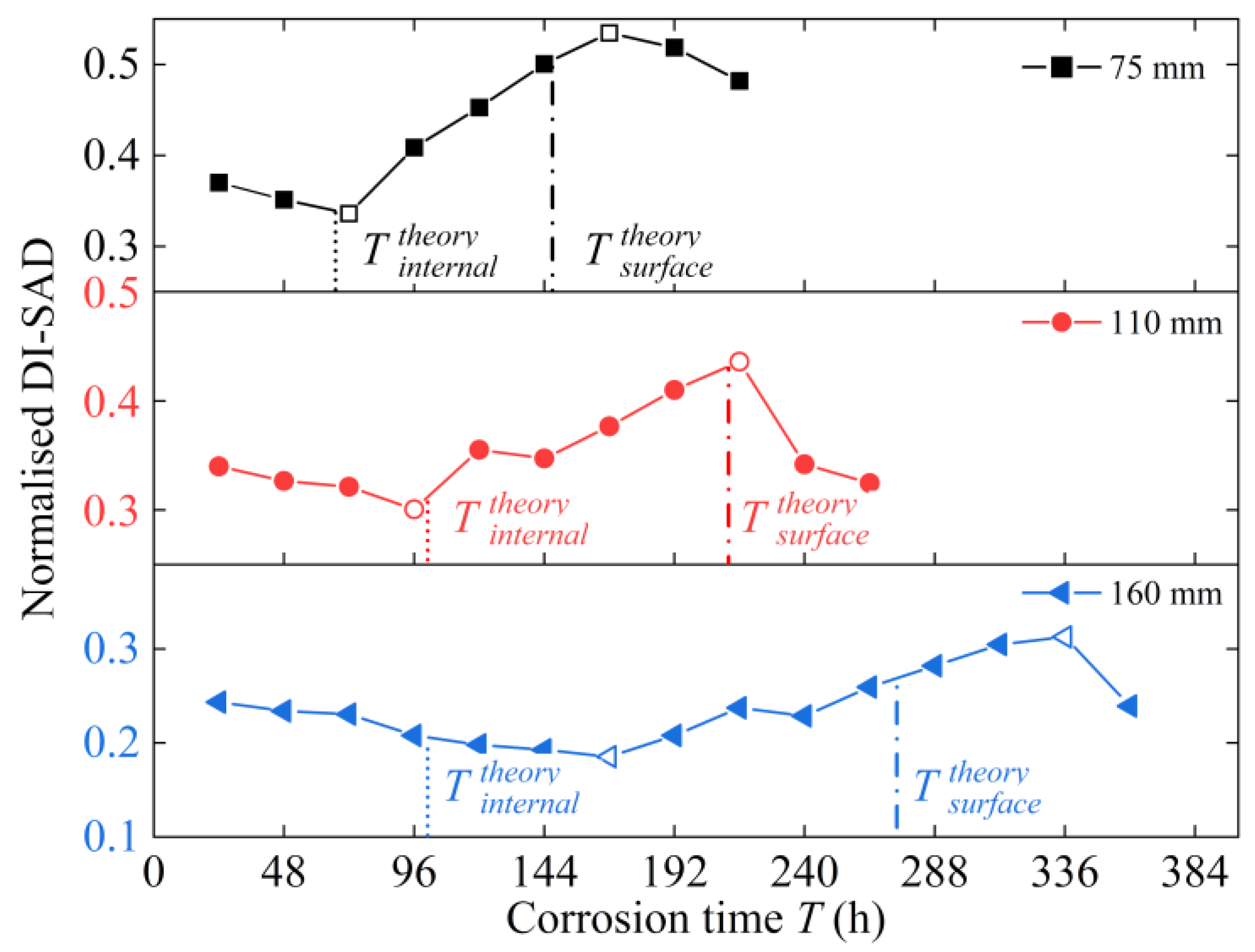
4.3.4. Comparative Analysis with Theoretical Corrosion Model
5. Conclusions
- (1)
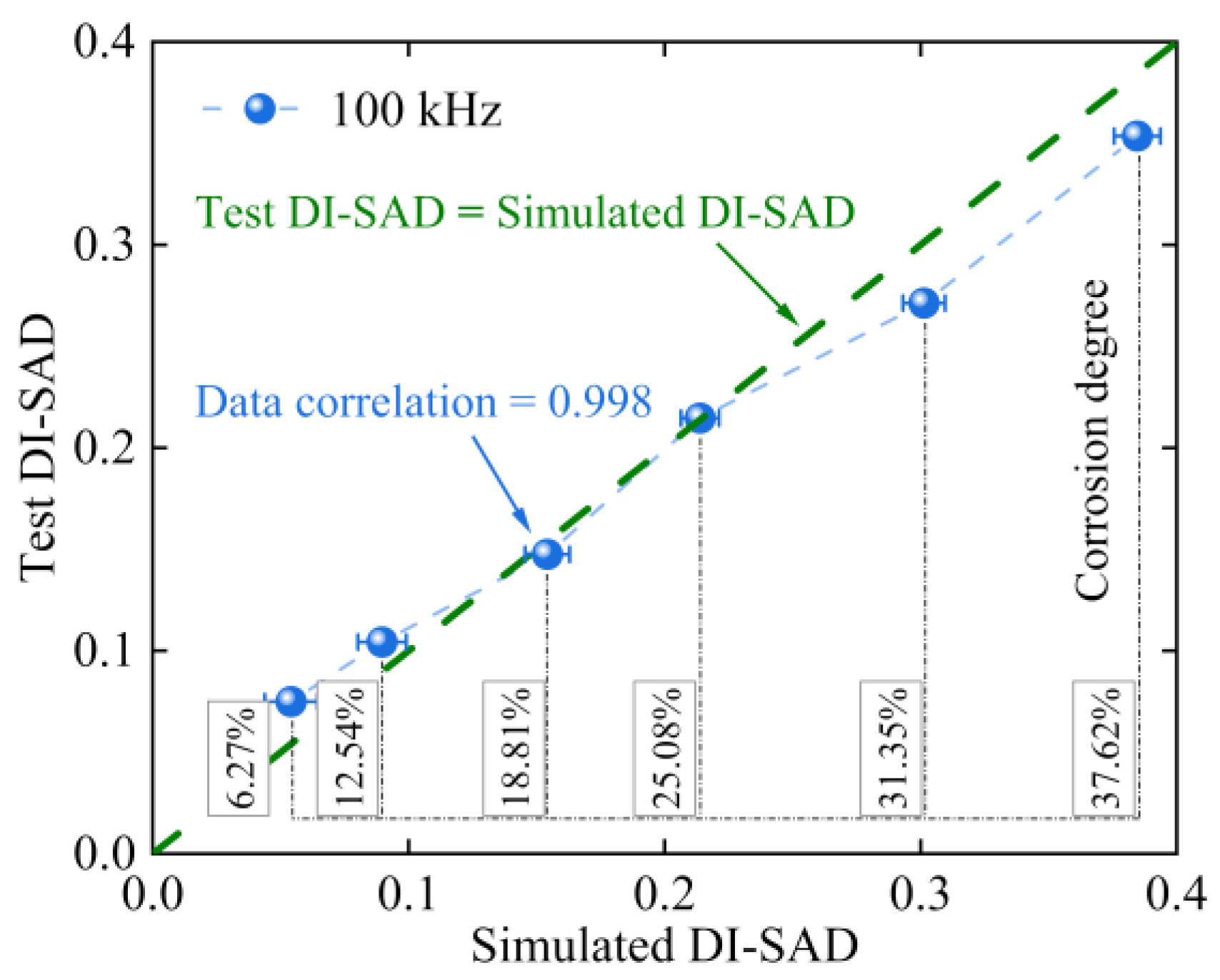
- The five proposed Dis all show a linear increasing trend with the increase in the reinforcement corrosion degree in the finite element analysis, and DI-SAD is the most sensitive to the corrosion state of the reinforcement compared with other DIs, as the excitation frequency increases in the range of 50–100 kHz. The results of the reinforcement corrosion test and the finite element are in good agreement, and their data correlation is 0.998.
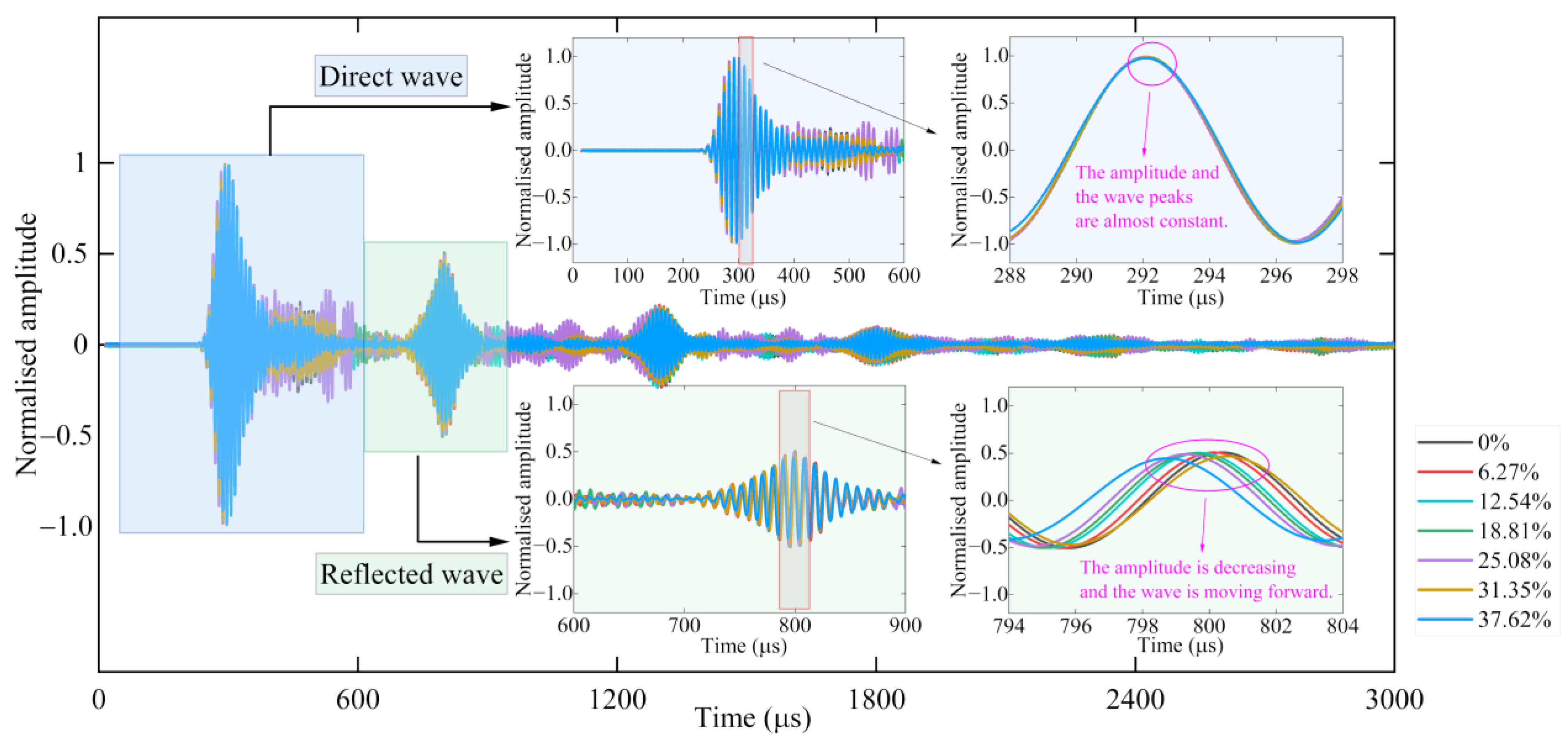
- (2)
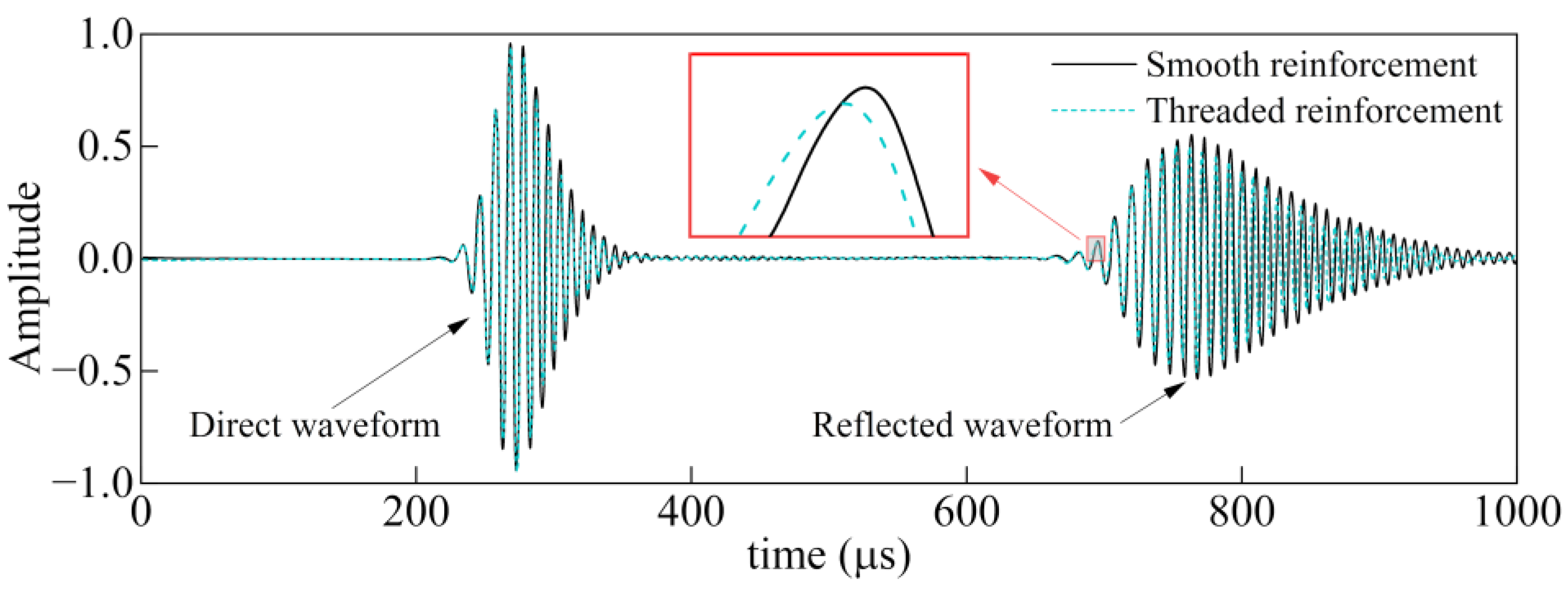
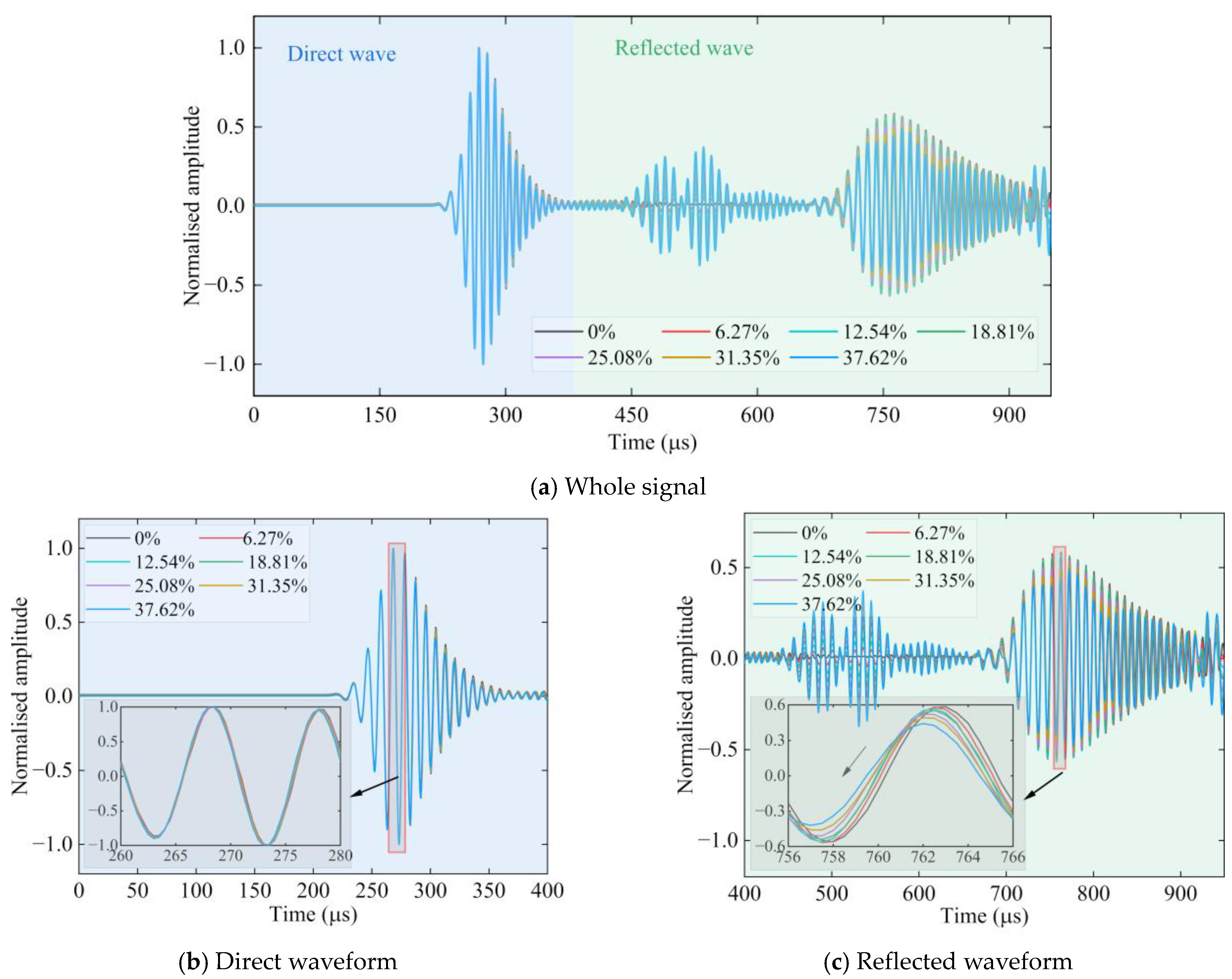
- The direct waveforms of the reinforcement in the finite element simulation and the test almost coincide, while the reflected waveforms tend to shift forward with the increase in the corrosion degree of the reinforcement, and their amplitudes are significantly decreased compared with the direct waveforms. The deviation between the GUW propagation velocity for the specimens with a different corrosion degree from the finite element and test and the numerical solution of the frequency dispersion curve (4510 m/s) is within 4%, which is in good agreement.
- (3)
- As the corrosion time of the RC specimens increases, the DI-SAD values of the GUW show three-stage changes. The larger the covered thickness of the RC specimens, the longer the corrosion time required for each stage. This is the result of the combined effect of the corrosion expansion pressure generated by corrosion and the ultimate tensile strength of the concrete material.
- (4)
- Increasing the covered thickness is beneficial to delay the appearance time of corrosion cracks in the RC specimens. When the covered thickness is small, the test value of the cracking time of the RC specimens is basically consistent with the theoretical results, and the error is within 12.5%, while the test values are significantly larger than the theoretical values when the covered thickness is larger, which is due to the assumed conditions of the theoretical model.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Feng, M.; Li, M.; Qu, H.; Tian, D.; Lu, M.; Gui, T.; Li, G. Degradation mechanism and evaluation of the carbonation resistance of concrete after high-temperature exposure. Structures 2023, 58, 105621. [Google Scholar] [CrossRef]
- Dong, B.; Ding, W.; Qin, S.; Han, N.; Fang, G.; Liu, Y.; Xing, F.; Hong, S. Chemical self-healing system with novel microcapsules for corrosion inhibition of rebar in concrete. Cem. Concr. Compos. 2018, 85, 83–91. [Google Scholar] [CrossRef]
- Dong, B.; Ding, W.; Qin, S.; Fang, G.; Liu, Y.; Dong, P.; Han, S.; Xing, F.; Hong, S. 3D visualized tracing of rebar corrosion-inhibiting features in concrete with a novel chemical self-healing system. Constr. Build. Mater. 2018, 168, 11–20. [Google Scholar] [CrossRef]
- Nafiseh, S.; Mohammad, A.M.; Farzaneh, H. Electrochemical paper-based biosensors for point-of-care diagnostics: Detection methods and applications. J. Electrochem. Sci. Eng. 2022, 12, 399–419. [Google Scholar]
- Wen, J.W.; Jiang, C.; Chen, H. High-precision corrosion detection via SH1 guided wave based on full waveform inversion. Sensors 2023, 23, 9902. [Google Scholar] [CrossRef]
- Mitra, M.; Gopalakrishnan, S. Guided wave based structural health monitoring: A review. Smart Mater. Struct. 2016, 25, 053001. [Google Scholar] [CrossRef]
- Sharma, S.; Mukherjee, A. Longitudinal guided waves for monitoring chloride corrosion in reinforcing bars in concrete. Struct. Health Monit. 2010, 9, 555–567. [Google Scholar] [CrossRef]
- Miller, T.H.; Hauser, C.J.; Kundu, T. Nondestructive inspection of corrosion and delamination at the concrete-steel reinforcement interface. ASME Int. Mech. Eng. Congr. Expo. 2002, 36495, 121–128. [Google Scholar]
- Zhang, Y.Y.; Li, D.S.; Zhou, Z. Time reversal method for guided waves with multimode and multipath on corrosion defect detection in wire. Appl. Sci. 2017, 7, 424–439. [Google Scholar] [CrossRef]
- Miller, T.H.; Kundu, T.; Huang, J.; Grill, J.Y. A new guided wave-based technique for corrosion monitoring in reinforced concrete. Struct. Health Monit. 2013, 12, 35–47. [Google Scholar] [CrossRef]
- Zhou, P.; Zhou, G.; Zhu, Z.; He, Z.; Ding, X.; Tang, C. A review of non-destructive damage detection methods for steel wire ropes. Appl. Sci. 2019, 9, 2771. [Google Scholar] [CrossRef]
- Sharma, S.; Mukherjee, A. Nondestructive evaluation of corrosion in varying environments using guided waves. Res. Nondestruct. Eval. 2013, 24, 63–88. [Google Scholar] [CrossRef]
- Sriramadasu, C.R.; Banerjee, S.; Lu, Y. Detection and assessment of pitting corrosion in rebars using scattering of ultrasonic guided waves. NDT&E Int. 2019, 101, 53–61. [Google Scholar]
- Farhidzadeh, A.; Salamone, S. Reference-free corrosion damage diagnosis in steel strands using guided ultrasonic waves. Ultrasonics 2015, 57, 198–208. [Google Scholar] [CrossRef]
- Umar, A.; Kumar, Y.S.; Tribikram, K. Detection and quantification of diameter reduction due to corrosion in reinforcing steel bars. Struct. Health Monit. 2015, 14, 532–543. [Google Scholar]
- Majhi, S.; Mukherjee, A.; George, N.V.; Uy, B. Corrosion detection in steel bar: A time-frequency approach. NDT E Int. 2019, 107, 102150. [Google Scholar] [CrossRef]
- Sun, X.T.; Zhang, M.H.; Gao, W.H.; Guo, C.; Kong, Q. A novel method for steel bar all-stage pitting corrosion monitoring using the feature-level fusion of ultrasonic direct waves and coda waves. Struct. Health Monit. 2023, 22, 714–729. [Google Scholar] [CrossRef]
- Li, D.S.; Zhang, S.F.; Yang, W.Y.; Zhang, W. Corrosion monitoring and evaluation of reinforced concrete structures utilizing the ultrasonic guided wave technique. Int. J. Distrib. Sens. Netw. 2014, 10, 827130. [Google Scholar] [CrossRef]
- Huo, L.S.; Li, C.B.; Jiang, T.Y.; Li, H.N. Feasibility study of steel bar corrosion monitoring using a piezoceramic transducer enabled time reversal method. Appl. Sci. 2018, 8, 2304. [Google Scholar] [CrossRef]
- Su RK, L.; Zhang, Y.L. A double-cylinder model incorporating confinement effects for the analysis of corrosion-caused cover cracking in reinforced concrete structures. Corros. Sci. 2015, 99, 205–218. [Google Scholar]
- Sriramadasu, R.C.; Banerjee, S.; Lu, Y. Sensitivity of longitudinal guided wave modes to pitting corrosion of rebars embedded in reinforced concrete. Constr. Build. Mater. 2020, 239, 117855. [Google Scholar] [CrossRef]
- Shi, F.; Wang, J.; Cui, W.; Qin, L. Monitoring steel corrosion by using the combination of ultrasonic guided wave and acoustic emission. IOP Conference Series. IOP Publ. Mater. Sci. Eng. 2019, 612, 022057. [Google Scholar]
- Liu, Y.; Ding, W.; Zhao, P.; Qin, L.; Shiotani, T. Research on in-situ corrosion process monitoring and evaluation of reinforced concrete via ultrasonic guided waves. Constr. Build. Mater. 2022, 321, 126317. [Google Scholar] [CrossRef]
- Zhang, S.Q.; Jia, Z.J.; Xiong, Y.L.; Cao, R.; Zhang, Y.; Banthia, N. Wave amplitude of embedded ultrasonic transducer-based damage monitoring of concrete due to steel bar corrosion. Struct. Health Monit. 2022, 21, 1694–1709. [Google Scholar] [CrossRef]
- Mayakuntla, P.K.; Ghosh, D.; Ganguli, A. Nondestructive evaluation of rebar corrosion in concrete structures using ultrasonics and laser-based sensing. Nondestruct. Test. Eval. 2022, 37, 297–314. [Google Scholar] [CrossRef]
- Jamshidi, F.; Dehestani, M. Time to cracking in concrete cover length due to reinforcement corrosion via a simplified fracture mechanics approach. Constr. Build. Mater. 2020, 258, 119588. [Google Scholar] [CrossRef]
- Bhargava, K.; Ghosh, A.K.; Mori, Y.; Ramanujam, S. Modeling of time to corrosion-induced cover cracking in reinforced concrete structures. Cem. Concr. Res. 2005, 35, 2203–2218. [Google Scholar] [CrossRef]
- Ma, C. Corrosion Monitoring of Rebar Embedded in Concrete Using Guided Ultrasonic Waves; Harbin Institute of Technology: Harbin, China, 2018. [Google Scholar]
- Ahmed, A.; Tai, C.N. Debonding detection in rebar-reinforced concrete structures using second harmonic generation of longitudinal guided wave. NDT&E Int. 2021, 122, 102496. [Google Scholar]
- David, B.M. Guided Wave Inspection of Embedded Cylindrical Structures; Imperial College London: London, UK, 2002. [Google Scholar]
- Velázquez, J.; Van Der Weide, J.; Hernández, E.; Hernández, H.H. Statistical modelling of pitting corrosion: Extrapolation of the maximum pit depth-growth. Int. J. Electrochem. Sci. 2014, 9, 4129–4143. [Google Scholar] [CrossRef]
- Melchers, R.E. A review of trends for corrosion loss and pit depth in longer-term exposures. Corros. Mater. Degrad. 2018, 1, 42–58. [Google Scholar] [CrossRef]
- Wu, B.; Li, L.T.; Wang, X.Y.; Yu, H.; Li, Y.; He, C. Non-destructive test of a surface defect on a steel bar based on ultrasonic guided wave techniques. Eng. Mech. 2003, 20, 149–154. [Google Scholar]
- Sun, J.P.; Sun, W.W.; Zhang, J.J.; Gao, C. Application of buckling energy dissipating steel plate in the research and development of seismic isolation bearing. Chin. J. Appl. Mech. 2021, 38, 2268–2274. [Google Scholar]
- Du, P.; Xu, D.; Huang, S.; Cheng, X. Assessment of corrosion of reinforcing steel bars in concrete using embedded piezoelectric transducers based on ultrasonic wave. Constr. Build. Mater. 2017, 151, 925–930. [Google Scholar] [CrossRef]
- Xue, Z.K. Optimization of Grout Ratio for Large-Span Precast Box Girder Pipeline Data Mining of Density Detection; Shijiazhuang Tiedao University: Shijiazhuang, China, 2023. [Google Scholar]
- Zeng, Z.H. Research on the Influence of Ultrasonic Impact Treatment on Acoustic Elastic Coefficient of Ultrasonic Nondestructive Evaluation; Jiangsu University of Science and Technology: Zhenjiang, China, 2022. [Google Scholar]
- Pagnotta, A. Probabilistic Impact-Echo Method for Nondestructive Detection of Defects Around Steel Reinforcing Bars in Reinforced Concrete; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2018. [Google Scholar]
- Qiu, L.; Yuan, S.F.; Chang, F.K.; Bao, Q.; Mei, H. On-line updating Gaussian mixture model for aircraft wing spar damage evaluation under time-varying boundary condition. Smart Mater. Struct. 2014, 23, 125001. [Google Scholar] [CrossRef]
- Torkamani, S.; Roy, S.; Barkey, E.M.; Sazonov, E.; Burkett, S.; Kotru, S. A novel damage index for damage identification using guided waves with application in laminated composites. Smart Mater. Struct. 2014, 23, 095015. [Google Scholar] [CrossRef]
- Sun, Y. Discussion on electromagnetic waves under the circumstances of total internal reflection and optical tunneling/International Informatization and Engineering Associations, Atlantis Press. In Proceedings of the 2015 4th National Conference on Electrical, Electronics and Computer Engineering (NCEECE 2015), Xi’an, China, 12–13 December 2015; Atlantis Press: Amsterdam, The Netherlands, 2015; Volume 6, pp. 170–175. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Type | MOE (GPa) | Poisson’s Ratio | Density (kg/m3) | Diameter (mm) | Length (mm) |
|---|---|---|---|---|---|---|
| Reinforcement | PSB500 | 208 | 0.3 | 7850 | 18 | 1100 |
| Covered concrete | C30 | 19 | 0.2 | 2066 | 75/110/160 | 700 |
| Corrosion Time T (h) | 0 | 24 | 48 | 72 | 96 | 120 | 144 |
|---|---|---|---|---|---|---|---|
| ηtest (%) | 0 | 5.85 | 10.67 | 18.25 | 22.49 | 32.06 | 36.78 |
| ηtheory (%) | 0 | 6.27 | 12.54 | 18.81 | 25.08 | 31.35 | 37.62 |
| Δη (%) | 0 | −6.70 | −14.91 | −2.98 | −10.33 | 2.26 | −2.23 |
| Covered Diameter D (mm) | Test Value for Internal Cracking Time (h) | Theoretical Value for Internal Cracking Time (h) | Error | Test Value for Surface Cracking Time (h) | Theoretical Value for Surface Cracking Time (h) | Error |
|---|---|---|---|---|---|---|
| 75 | 72 | 67 | −6.94% | 168 | 147 | −12.50% |
| 110 | 96 | 101 | 5.21% | 216 | 212 | −1.85% |
| 160 | 168 | 101 | −39.88% | 336 | 274 | −18.45% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qian, J.; Zhang, P.; Wu, Y.; Jia, R.; Yang, J. Study on Corrosion Monitoring of Reinforced Concrete Based on Longitudinal Guided Ultrasonic Waves. Appl. Sci. 2024, 14, 1201. https://doi.org/10.3390/app14031201
Qian J, Zhang P, Wu Y, Jia R, Yang J. Study on Corrosion Monitoring of Reinforced Concrete Based on Longitudinal Guided Ultrasonic Waves. Applied Sciences. 2024; 14(3):1201. https://doi.org/10.3390/app14031201
Chicago/Turabian StyleQian, Ji, Peiyun Zhang, Yongqiang Wu, Ruixin Jia, and Jipeng Yang. 2024. "Study on Corrosion Monitoring of Reinforced Concrete Based on Longitudinal Guided Ultrasonic Waves" Applied Sciences 14, no. 3: 1201. https://doi.org/10.3390/app14031201
APA StyleQian, J., Zhang, P., Wu, Y., Jia, R., & Yang, J. (2024). Study on Corrosion Monitoring of Reinforced Concrete Based on Longitudinal Guided Ultrasonic Waves. Applied Sciences, 14(3), 1201. https://doi.org/10.3390/app14031201