
A Helly Model-Based MPC Control System for Jam-Absorption Driving Strategy against Traffic Waves in Mixed Traffic


Abstract
:1. Introduction
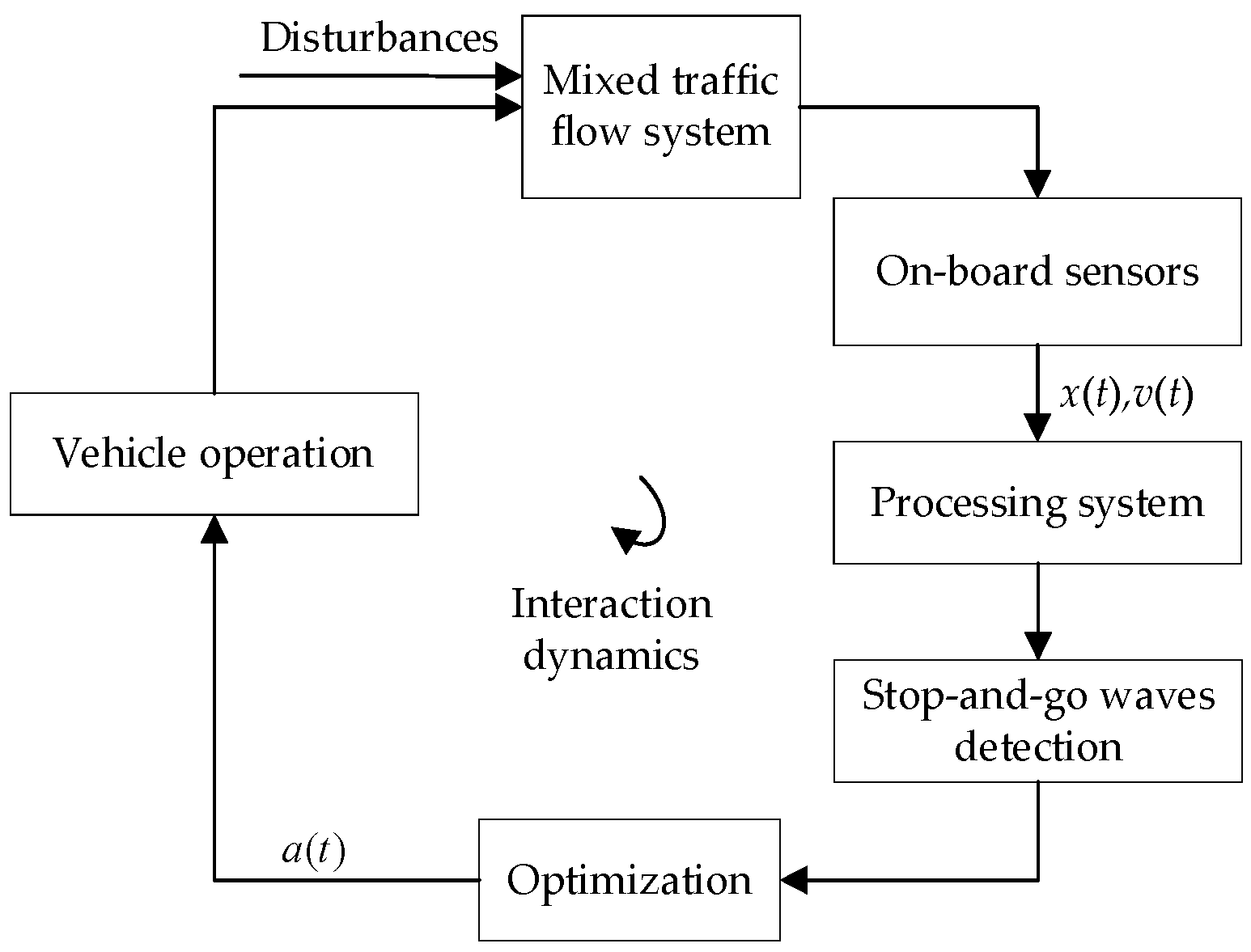
2. The Application Framework
3. System Description
3.1. The Manual Vehicle
3.2. Traffic State Dynamics
3.3. Objective Function
3.4. System Constraints
4. Numerical Simulation
4.1. Experimental Design
4.2. Results and Discussion
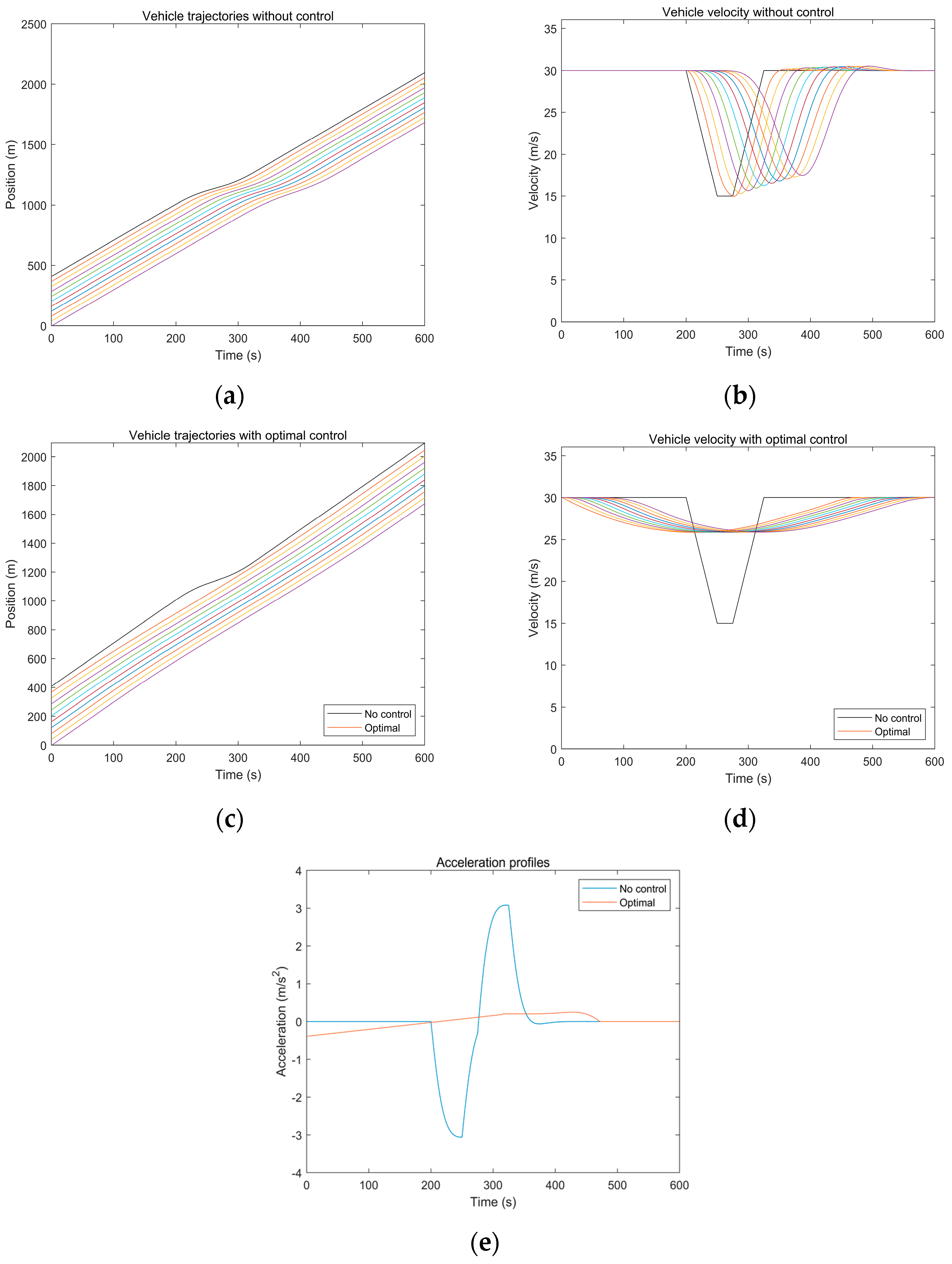
4.2.1. The Scenario with a Single Traffic Wave
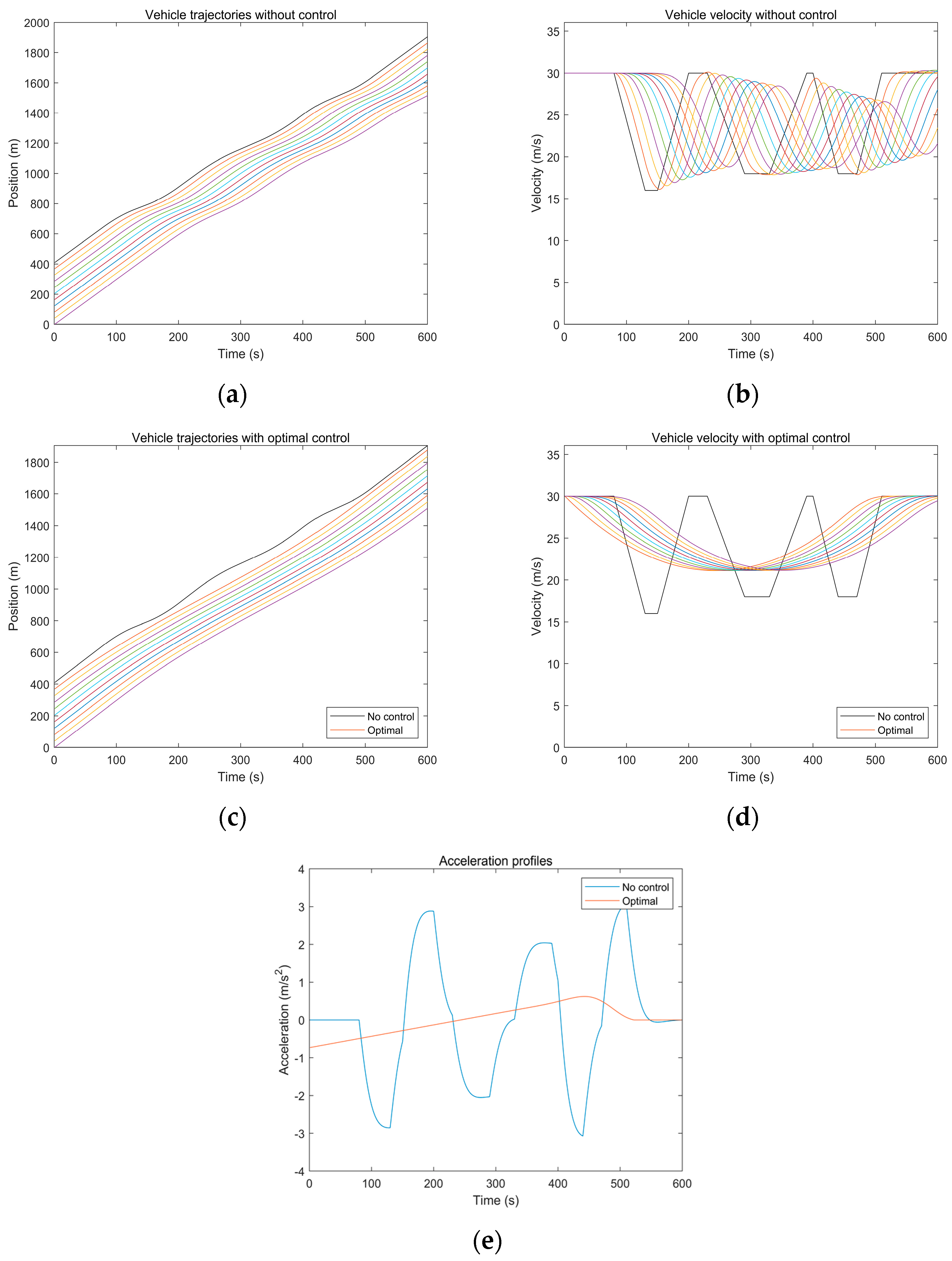
4.2.2. The Scenario with Multiple Traffic Waves
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, X.; Cui, J.; An, S.; Parsafard, M. Stop-and-go traffic analysis: Theoretical properties, environmental impacts and oscillation mitigation. Transp. Res. Part B Methodol. 2014, 70, 319–339. [Google Scholar] [CrossRef]
- Zhang, L.; Luan, H.; Zhan, J. Stabilization of stop-and-go waves in vehicle traffic flow. IEEE Trans. Autom. Control 2023, 1–14. [Google Scholar] [CrossRef]
- Ma, J.; Li, X.; Shladover, S.; Rakha, H.A.; Lu, X.Y.; Jagannathan, R.; Dailey, D.J. Freeway speed harmonization. IEEE Trans. Intell. Veh. 2016, 1, 78–89. [Google Scholar] [CrossRef]
- Müller, E.R.; Carlson, R.C.; Kraus, W.; Papageorgiou, M. Microsimulation analysis of practical aspects of traffic control with variable speed limits. IEEE Trans. Intell. Transp. Syst. 2015, 16, 512–523. [Google Scholar] [CrossRef]
- Yang, X.; Lin, Y.; Lu, Y.; Zou, N. Optimal variable speed limit control for real-time freeway congestions. Procedia-Soc. Behav. Sci. 2013, 96, 2362–2372. [Google Scholar] [CrossRef]
- van de Weg, G.S.; Hegyi, A.; Hoogendoorn, S.P.; De Schutter, B. Efficient freeway MPC by parameterization of ALINEA and a speed-limited area. IEEE Trans. Intell. Transp. Syst. 2019, 20, 16–29. [Google Scholar] [CrossRef]
- Hegyi, A.; Hoogendoorn, S.P. Dynamic speed limit control to resolve shock waves on freeways-field test results of the SPECIALIST algorithm. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 519–524. [Google Scholar] [CrossRef]
- Han, Y.; Hegyi, A.; Yuan, Y.; Hoogendoorn, S.; Papageorgiou, M.; Roncoli, C. Resolving freeway jam waves by discrete first-order model-based predictive control of variable speed limits. Transp. Res. Part C Emerg. Technol. 2017, 77, 405–420. [Google Scholar] [CrossRef]
- Han, Y.; Wang, M.; He, Z.; Li, Z.; Wang, H.; Liu, P. A linear lagrangian model predictive controller of macro-and micro-variable speed limits to eliminate freeway jam waves. Transp. Res. Part C Emerg. Technol. 2021, 128, 103–121. [Google Scholar] [CrossRef]
- Roncoli, C.; Papageorgiou, M.; Papamichail, I. Traffic flow optimisation in presence of vehicle automation and communication systems–part II: Optimal control for multi-lane motorways. Transp. Res. Part C Emerg. Technol. 2015, 57, 260–275. [Google Scholar] [CrossRef]
- Roncoli, C.; Papageorgiou, M.; Papamichail, I. Traffic flow optimisation in presence of vehicle automation and communication systems-Part I: A first-order multi-lane model for motorway traffic. Transp. Res. Part C Emerg. Technol. 2015, 57, 241–259. [Google Scholar] [CrossRef]
- Kim, T.; Jerath, K. Congestion-aware cooperative adaptive cruise control for mitigation of self-organized traffic jams. IEEE Trans. Intell. Transp. Syst. 2021, 23, 6621–6632. [Google Scholar] [CrossRef]
- Stern, R.E.; Cui, S.; Delle Monache, M.L.; Bhadani, R.; Bunting, M.; Churchill, M.; Work, D.B. Dissipation of stop-and-go waves via control of autonomous vehicles: Field experiments. Transp. Res. Part C Emerg. Technol. 2018, 89, 205–221. [Google Scholar] [CrossRef]
- Cummins, L.; Sun, Y.; Reynolds, M. Simulating the effectiveness of wave dissipation by FollowerStopper autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2021, 123, 102954. [Google Scholar] [CrossRef]
- Nateeboon, T.; Tawabutr, H.; Termsaithong, T.; Hirunsirisawat, E. Ability to damp traffic wave when controlling every car on the road by FollowerStopper controller. In Proceedings of the Journal of Physics: Conference Series, Siam Physics Congress 2018 (SPC2018), Pitsanulok, Thailand, 21–23 May 2018; Volume 1144. [Google Scholar] [CrossRef]
- Nishi, R.; Tomoeda, A.; Shimura, K.; Nishinari, K. Theory of jam-absorption driving. Transp. Res. Part B Methodol. 2013, 50, 116–129. [Google Scholar] [CrossRef]
- Nishi, R. Theoretical conditions for restricting secondary jams in jam-absorption driving scenarios. Phys. A Stat. Mech. Its Appl. 2020, 542, 123393. [Google Scholar] [CrossRef]
- Li, S.; Yanagisawa, D.; Nishinari, K. A jam-absorption driving system for reducing multiple moving jams by estimating moving jam propagation. Transp. Res. Part C Emerg. Technol. 2024, 158, 104394. [Google Scholar] [CrossRef]
- Taniguchi, Y.; Nishi, R.; Ezaki, T.; Nishinari, K. Jam-absorption driving with a car-following model. Phys. A Stat. Mech. Its Appl. 2015, 433, 304–315. [Google Scholar] [CrossRef]
- He, Z.; Zheng, L.; Song, L.; Zhu, N. A jam-absorption driving strategy for mitigating traffic oscillations. IEEE Trans. Intell. Transp. Syst. 2016, 18, 802–813. [Google Scholar] [CrossRef]
- Zheng, Y.; Zhang, G.; Li, Y.; Li, Z. Optimal jam-absorption driving strategy for mitigating rear-end collision risks with os-cillations on freeway straight segments. Accid. Anal. Prev. 2020, 135, 105367. [Google Scholar] [CrossRef]
- Li, X.; Ghiasi, A.; Xu, Z.; Qu, X. A piecewise trajectory optimization model for connected automated vehicles: Exact optimization algorithm and queue propagation analysis. Transp. Res. Part B Methodol. 2018, 118, 429–456. [Google Scholar] [CrossRef]
- Salzmann, T.; Kaufmann, E.; Arrizabalaga, J.; Pavone, M.; Scaramuzza, D.; Ryll, M. Real-time neural MPC: Deep learning model predictive control for quadrotors and agile robotic platforms. IEEE Robot. Autom. Lett. 2023, 8, 2397–2404. [Google Scholar] [CrossRef]
- Stano, P.; Montanaro, U.; Tavernini, D.; Tufo, M.; Fiengo, G.; Novella, L.; Sorniotti, A. Model predictive path tracking control for automated road vehicles: A review. Annu. Rev. Control 2023, 55, 194–236. [Google Scholar] [CrossRef]
- Ghandriz, T.; Jacobson, B.; Nilsson, P.; Laine, L. Trajectory-following and off-tracking minimisation of long combination vehicles: A comparison between nonlinear and linear model predictive control. Veh. Syst. Dyn. 2024, 62, 277–310. [Google Scholar] [CrossRef]
- Cao, J.; Song, C.; Peng, S.; Song, S.; Zhang, X.; Xiao, F. Trajectory tracking control algorithm for autonomous vehicle considering cornering characteristics. IEEE Access 2020, 8, 59470–59484. [Google Scholar] [CrossRef]
- Ahn, T.; Lee, Y.; Park, K. Design of integrated autonomous driving control system that incorporates chassis controllers for improving path tracking performance and vehicle stability. Electronics 2021, 10, 144. [Google Scholar] [CrossRef]
- Liang, Y.; Li, Y.; Khajepour, A.; Zheng, L. Multi-model adaptive predictive control for path following of autonomous vehicles. IET Intell. Transp. Syst. 2020, 14, 2092–2101. [Google Scholar] [CrossRef]
- Chowdhri, N.; Ferranti, L.; Iribarren, F.S.; Shyrokau, B. Integrated nonlinear model predictive control for automated driving. Control Eng. Pract. 2021, 106, 104654. [Google Scholar] [CrossRef]
- Zhang, K.; Sprinkle, J.; Sanfelice, R.G. Computationally aware control of autonomous vehicles: A hybrid model predictive control approach. Auton. Robot. 2015, 39, 503–517. [Google Scholar] [CrossRef]
- Spielberg, N.A.; Brown, M.; Gerdes, J.C. Neural network model predictive motion control applied to automated driving with unknown friction. IEEE Trans. Control Syst. Technol. 2021, 30, 1934–1945. [Google Scholar] [CrossRef]
- Hang, P.; Xia, X.; Chen, G.; Chen, X. Active safety control of automated electric vehicles at driving limits: A tube-based MPC approach. IEEE Trans. Transp. Electrif. 2021, 8, 1338–1349. [Google Scholar] [CrossRef]
- Karimshoushtari, M.; Novara, C.; Tango, F. How imitation learning and human factors can be combined in a model predictive control algorithm for adaptive motion planning and control. Sensors 2021, 21, 4012. [Google Scholar] [CrossRef]
- Costa, G.; Pinho, J.; Botto, M.A.; Lima, P.U. Online learning of MPC for autonomous racing. Robot. Auton. Syst. 2023, 167, 104469. [Google Scholar] [CrossRef]
- Hewing, L.; Wabersich, K.P.; Menner, M.; Zeilinger, M.N. Learning-based model predictive control: Toward safe learning in control. Annu. Rev. Control Robot. Auton. Syst. 2020, 3, 269–296. [Google Scholar] [CrossRef]
- Adetola, V.; Guay, M. Robust adaptive MPC for constrained uncertain nonlinear systems. Int. J. Adapt. Control Signal Process. 2011, 25, 155–167. [Google Scholar] [CrossRef]
- Borrelli, F.; Bemporad, A.; Morari, M. Predictive Control for Linear and Hybrid Systems, 1st ed.; Cambridge University Press: New York, NY, USA, 2017; pp. 9–448. [Google Scholar] [CrossRef]
- Jiang, S.; Keyvan-Ekbatani, M. Hybrid perimeter control with real-time partitions in heterogeneous urban networks: An integration of deep learning and MPC. Transp. Res. Part C Emerg. Technol. 2023, 154, 104240. [Google Scholar] [CrossRef]
- Stoffel, P.; Henkel, P.; Rätz, M.; Kümpel, A.; Müller, D. Safe operation of online learning data driven model predictive control of building energy systems. Energy AI 2023, 14, 100296. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, L.; Chen, J.; Zheng, X.; Pan, H.; Zhang, W. MPC-based dynamic speed control of CAVs in multiple sections upstream of the bottleneck area within a mixed vehicular environment. Phys. A Stat. Mech. Its Appl. 2023, 613, 128542. [Google Scholar] [CrossRef]
- Li, L.; Gan, J.; Qu, X.; Lu, W.; Mao, P.; Ran, B. A dynamic control method for CAVs platoon based on the MPC framework and safety potential field model. KSCE J. Civ. Eng. 2021, 25, 1874–1886. [Google Scholar] [CrossRef]
- Wang, C.; Dai, Y.; Xia, J. A CAV platoon control method for isolated intersections: Guaranteed feasible multi-objective approach with priority. Energies 2020, 13, 625. [Google Scholar] [CrossRef]
- Qiu, J.; Du, L. Cooperative trajectory control for synchronizing the movement of two connected and autonomous vehicles separated in a mixed traffic flow. Transp. Res. Part B Methodol. 2023, 174, 102769. [Google Scholar] [CrossRef]
- Wen, J.; Wang, S.; Wu, C.; Xiao, X.; Lyu, N. A longitudinal velocity CF-MPC model for connected and automated vehicle platooning. IEEE Trans. Intell. Transp. Syst. 2022, 24, 6463–6476. [Google Scholar] [CrossRef]
- Pang, H.; Liu, N.; Hu, C.; Xu, Z. A practical trajectory tracking control of autonomous vehicles using linear time-varying MPC method. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 709–723. [Google Scholar] [CrossRef]
- Zhou, H.; Zhou, A.; Li, T.; Chen, D.; Peeta, S.; Laval, J. Congestion-mitigating MPC design for adaptive cruise control based on Newell’s car following model: History outperforms prediction. Transp. Res. Part C Emerg. Technol. 2022, 142, 103801. [Google Scholar] [CrossRef]
- Wang, J.; Lian, Y.; Jiang, Y.; Xu, Q.; Li, K.; Jones, C.N. Distributed data-driven predictive control for cooperatively smoothing mixed traffic flow. Transp. Res. Part C Emerg. Technol. 2023, 155, 104274. [Google Scholar] [CrossRef]
- Zhou, Q.; Zhou, B.; Hu, S.; Roncoli, C.; Wang, Y.; Hu, J.; Lu, G. A safety-enhanced eco-driving strategy for connected and autonomous vehicles: A hierarchical and distributed framework. Transp. Res. Part C Emerg. Technol. 2023, 156, 104320. [Google Scholar] [CrossRef]
- Liang, J.; Tian, Q.; Feng, J.; Pi, D.; Yin, G. A polytopic model-based robust predictive control scheme for path tracking of autonomous vehicles. IEEE Trans. Intell. Veh. 2023, 1–11. [Google Scholar] [CrossRef]
- Liang, J.; Li, Y.; Yin, G.; Xu, L.; Lu, Y.; Feng, J.; Shen, T.; Cai, G. A MAS-based hierarchical architecture for the cooperation control of connected and automated vehicles. IEEE Trans. Veh. Technol. 2022, 72, 1559–1573. [Google Scholar] [CrossRef]
- Roncoli, C.; Papamichail, I.; Papageorgiou, M. Hierarchical model predictive control for multi-lane motorways in presence of vehicle automation and communication systems. Transp. Res. Part C Emerg. Technol. 2016, 62, 117–132. [Google Scholar] [CrossRef]
- Nishi, R.; Watanabe, T. System-size dependence of a jam-absorption driving strategy to remove traffic jam caused by a sag under the presence of traffic instability. Phys. A Stat. Mech. Its Appl. 2022, 600, 127512. [Google Scholar] [CrossRef]
- Helly, W. Simulation of bottlenecks in single lane traffic flow. In Proceedings of the Theory of Traffic Flow Symposium, Warren, MI, USA, 7–8 December 1959. [Google Scholar]
- Mattas, K.; Albano, G.; Donà, R.; He, Y.; Ciuffo, B. On the relationship between traffic hysteresis and string stability of vehicle platoons. Transp. Res. Part B Methodol. 2023, 174, 102785. [Google Scholar] [CrossRef]
- Das, S.; Maurya, A.K. Defining Time-to-Collision thresholds by the type of lead vehicle in non-lane-based traffic environments. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4972–4982. [Google Scholar] [CrossRef]
- Rosas-Jaimes, O.A.; Quezada-Téllez, L.A.; Fernández-Anaya, G. Control designs and stability analyses for Helly’s car-following model. Int. J. Mod. Phys. C 2018, 29, 1850025. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | The Change in Performance Metrics (%) | ||
|---|---|---|---|
| Throughput | TET | TIT | |
| No control | 0 | 0 | 0 |
| JAD | 58.46 | −65.96 | −73.65 |
| Optimal control | 61.11 | −72.01 | −75.31 |
| Methods | The Change in Performance Metrics (%) | ||
|---|---|---|---|
| Throughput | TET | TIT | |
| No control | 0 | 0 | 0 |
| JAD | 57.23 | −65.06 | −71.99 |
| Optimal control | 61.48 | −73.20 | −76.21 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Roncoli, C.; Ju, Y. A Helly Model-Based MPC Control System for Jam-Absorption Driving Strategy against Traffic Waves in Mixed Traffic. Appl. Sci. 2024, 14, 1424. https://doi.org/10.3390/app14041424
Li H, Roncoli C, Ju Y. A Helly Model-Based MPC Control System for Jam-Absorption Driving Strategy against Traffic Waves in Mixed Traffic. Applied Sciences. 2024; 14(4):1424. https://doi.org/10.3390/app14041424
Chicago/Turabian StyleLi, Haizhen, Claudio Roncoli, and Yongfeng Ju. 2024. "A Helly Model-Based MPC Control System for Jam-Absorption Driving Strategy against Traffic Waves in Mixed Traffic" Applied Sciences 14, no. 4: 1424. https://doi.org/10.3390/app14041424
APA StyleLi, H., Roncoli, C., & Ju, Y. (2024). A Helly Model-Based MPC Control System for Jam-Absorption Driving Strategy against Traffic Waves in Mixed Traffic. Applied Sciences, 14(4), 1424. https://doi.org/10.3390/app14041424