
Trajectory Tracking Control of Remotely Operated Vehicles via a Fast-Sliding Mode Controller with a Fixed-Time Disturbance Observer
Abstract
:1. Introduction
- An innovative fast reaching law (FRL) is presented to tackle the chatter problem of conventional SMC. The presented FRL can both achieve fast response as well as reduce the system chatter, which solves the shortcomings of the ERL;
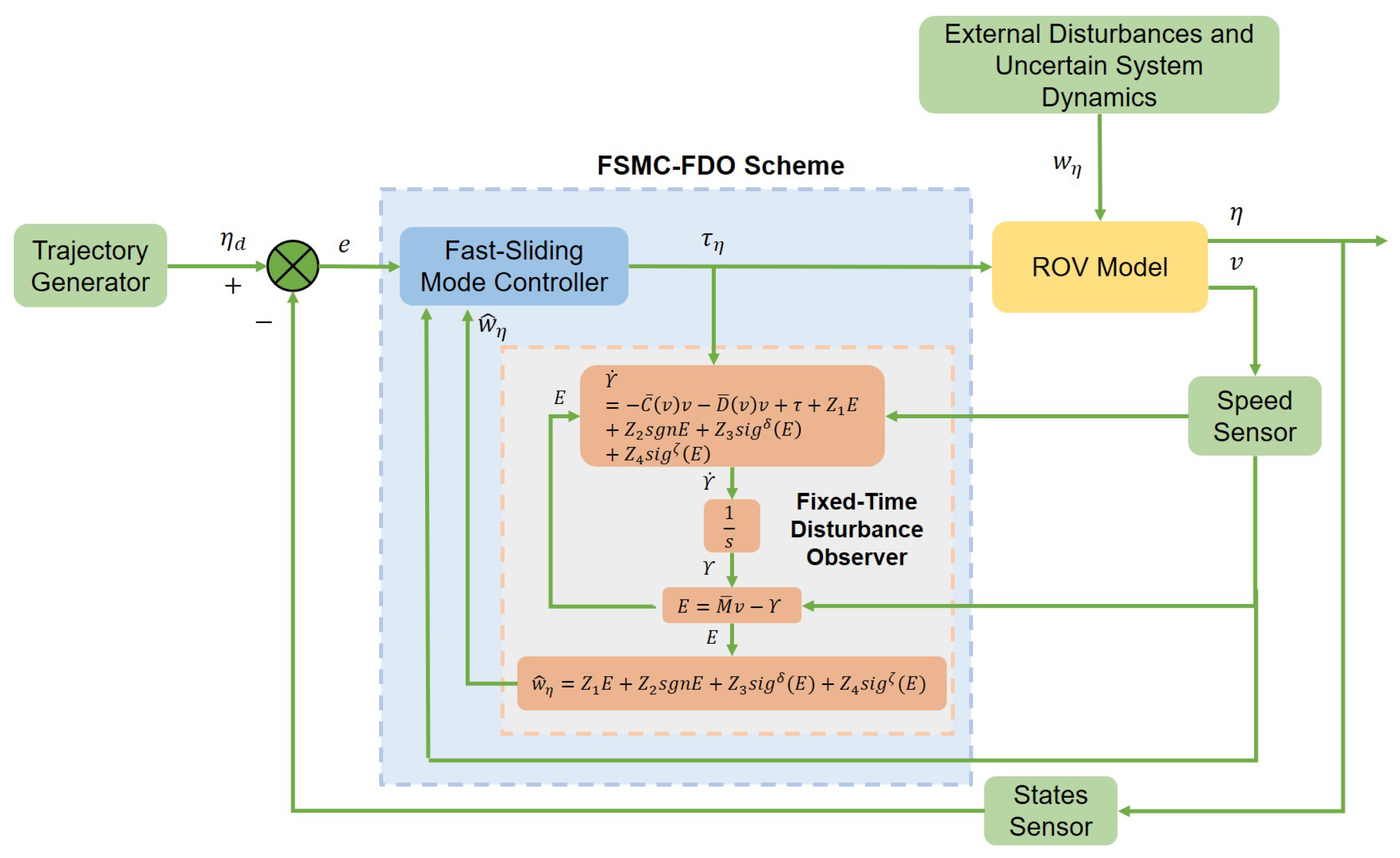
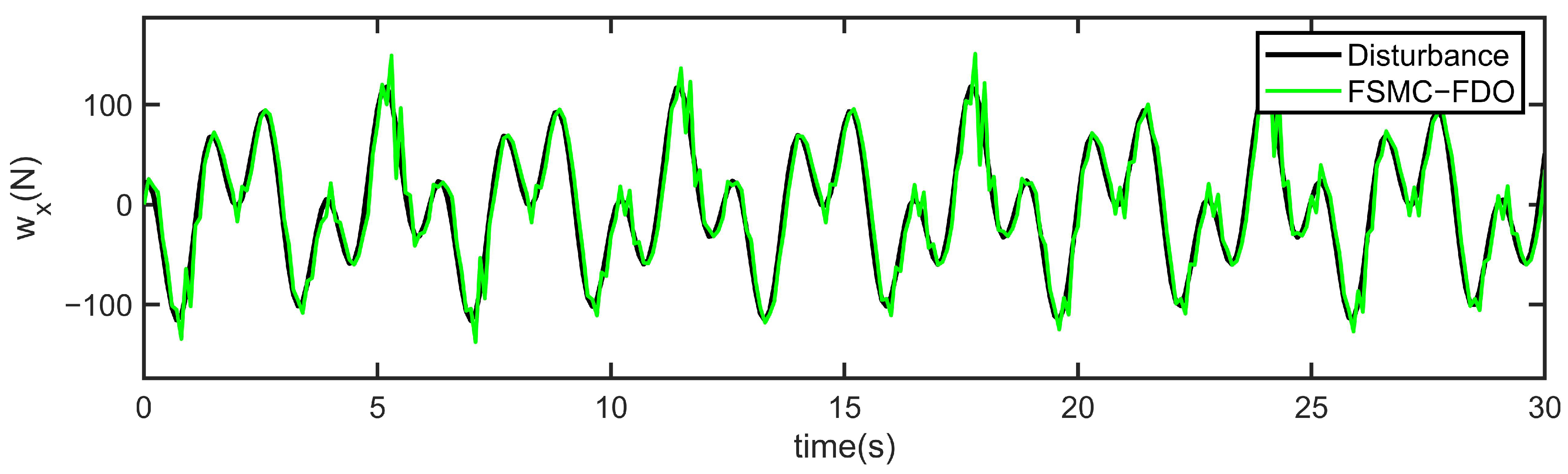
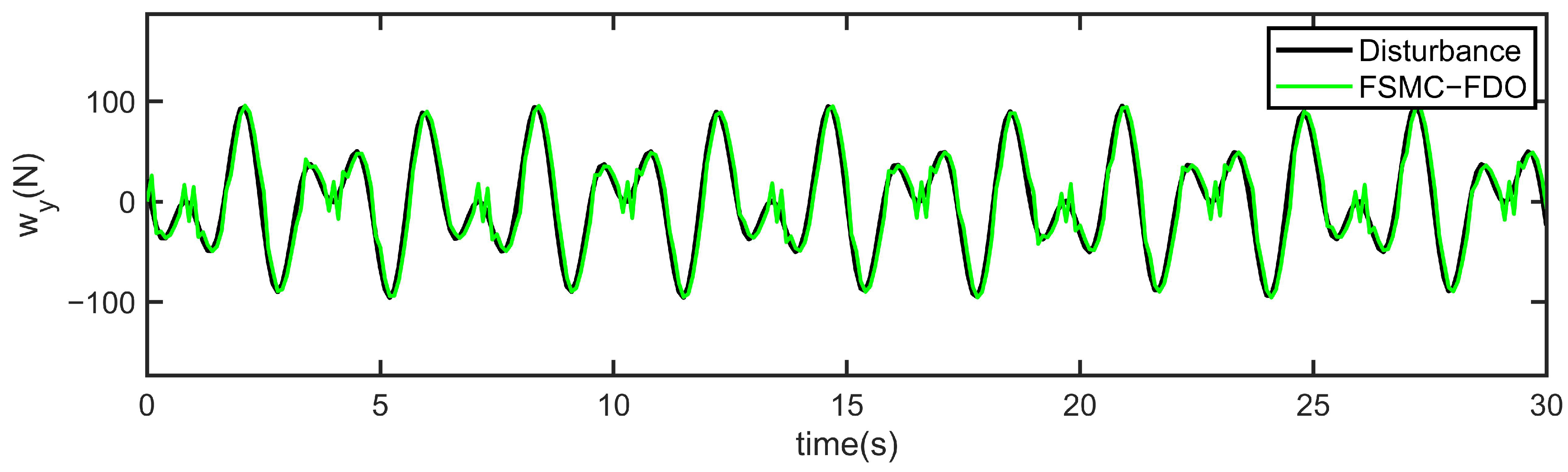
- A novel fixed-time disturbance observer is presented in order to compensate for ROVs model parameter errors and time-varying external disturbances. A Lyapunov analysis is used to demonstrate the stability of the system;
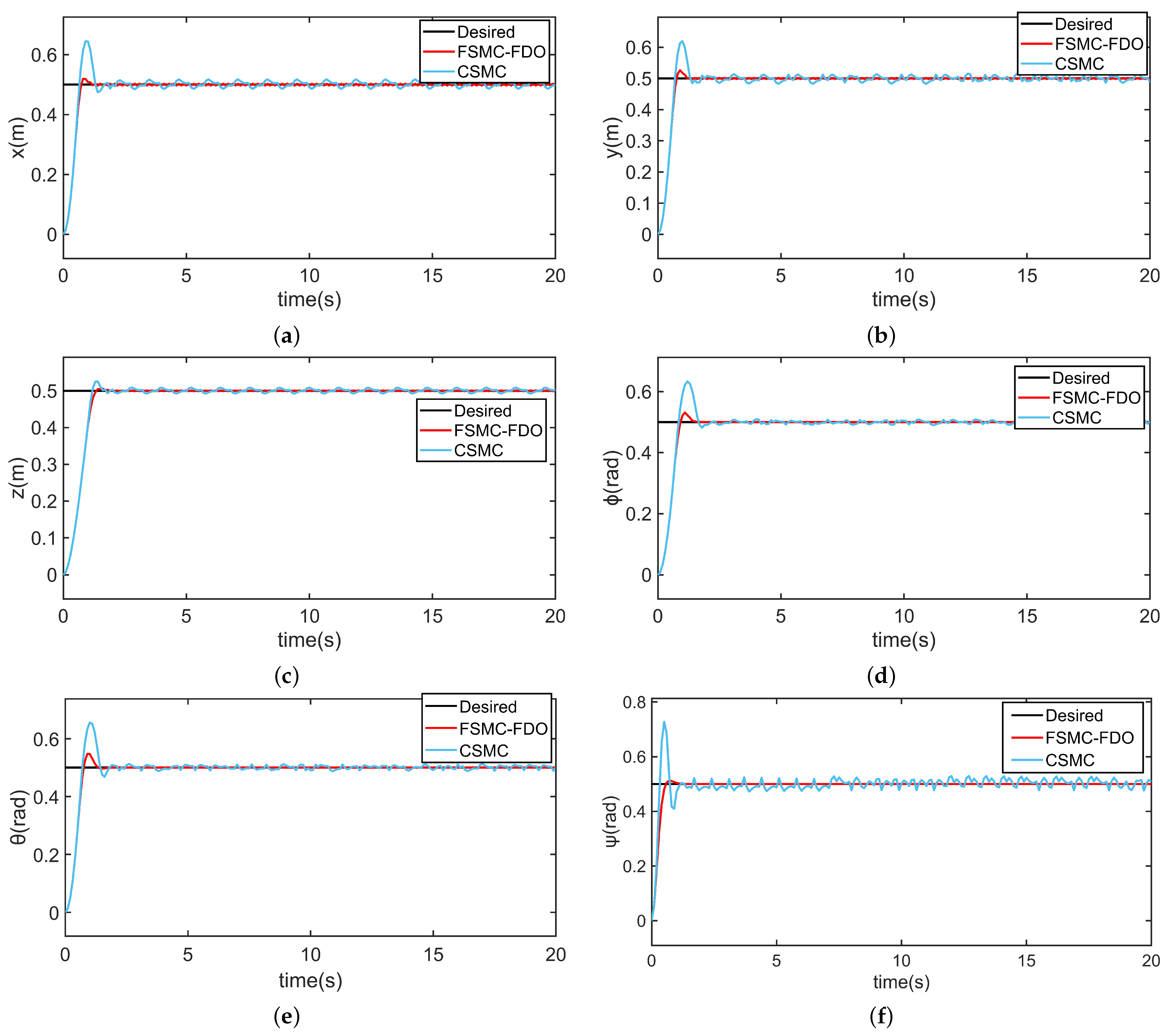
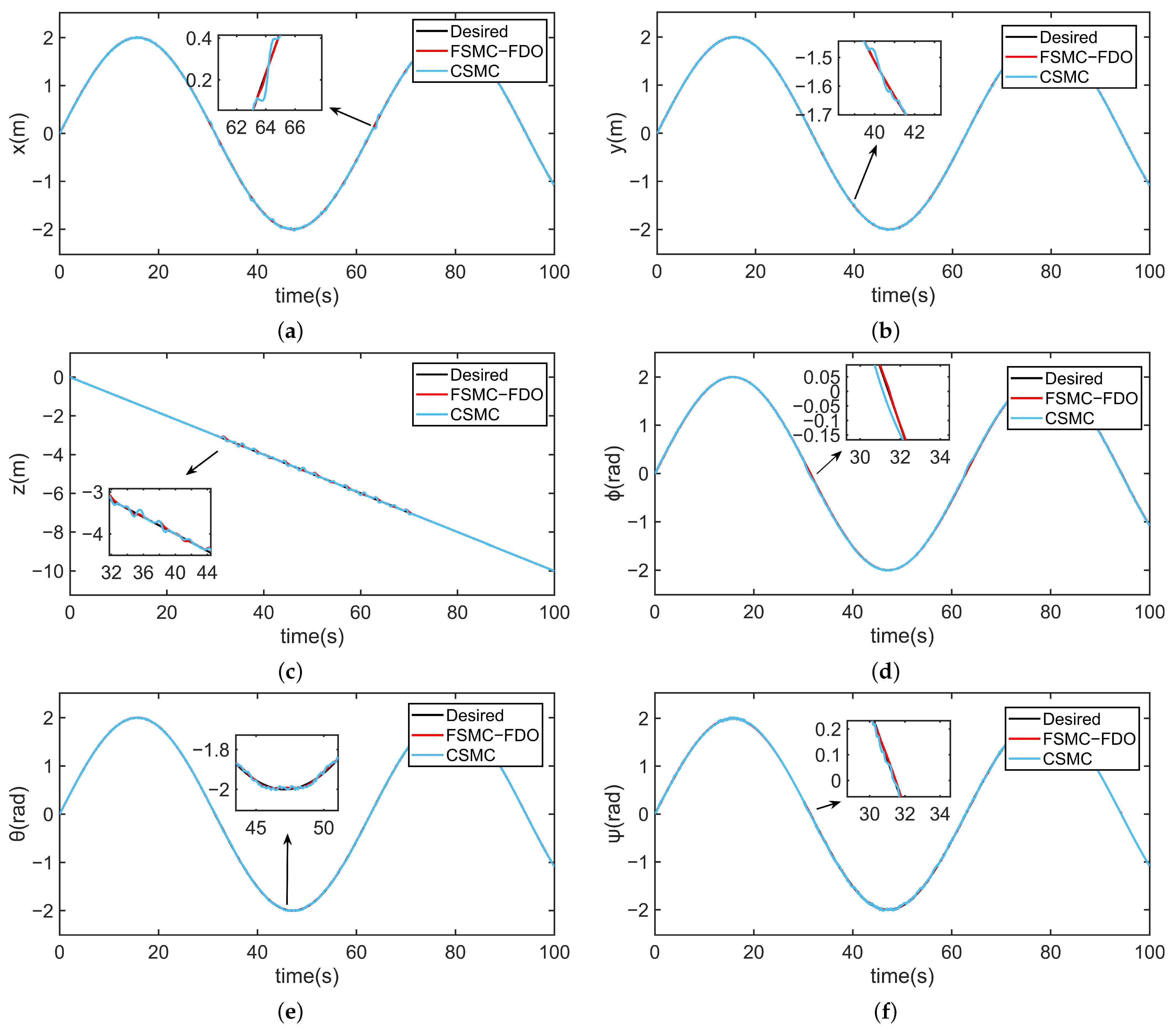
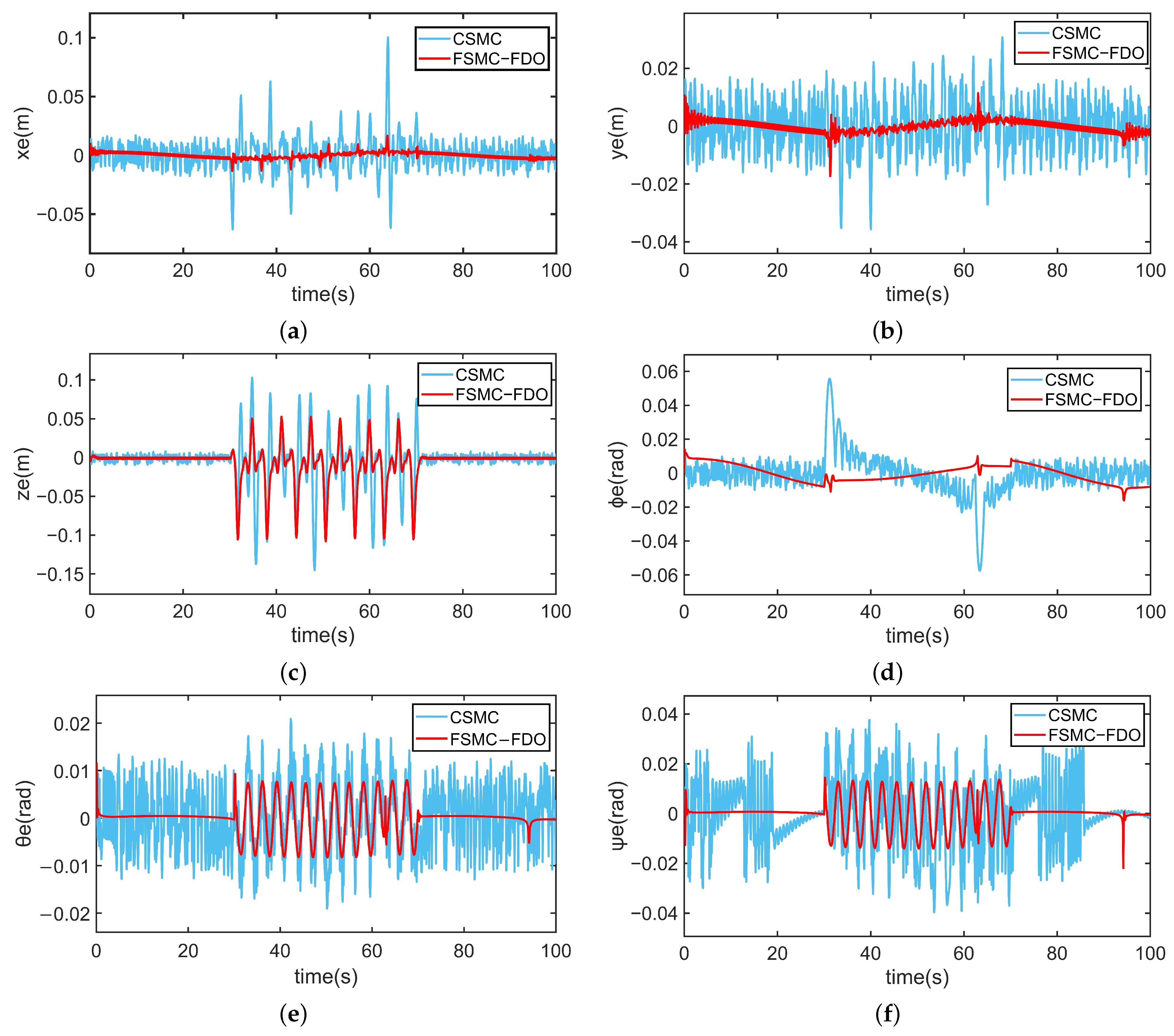
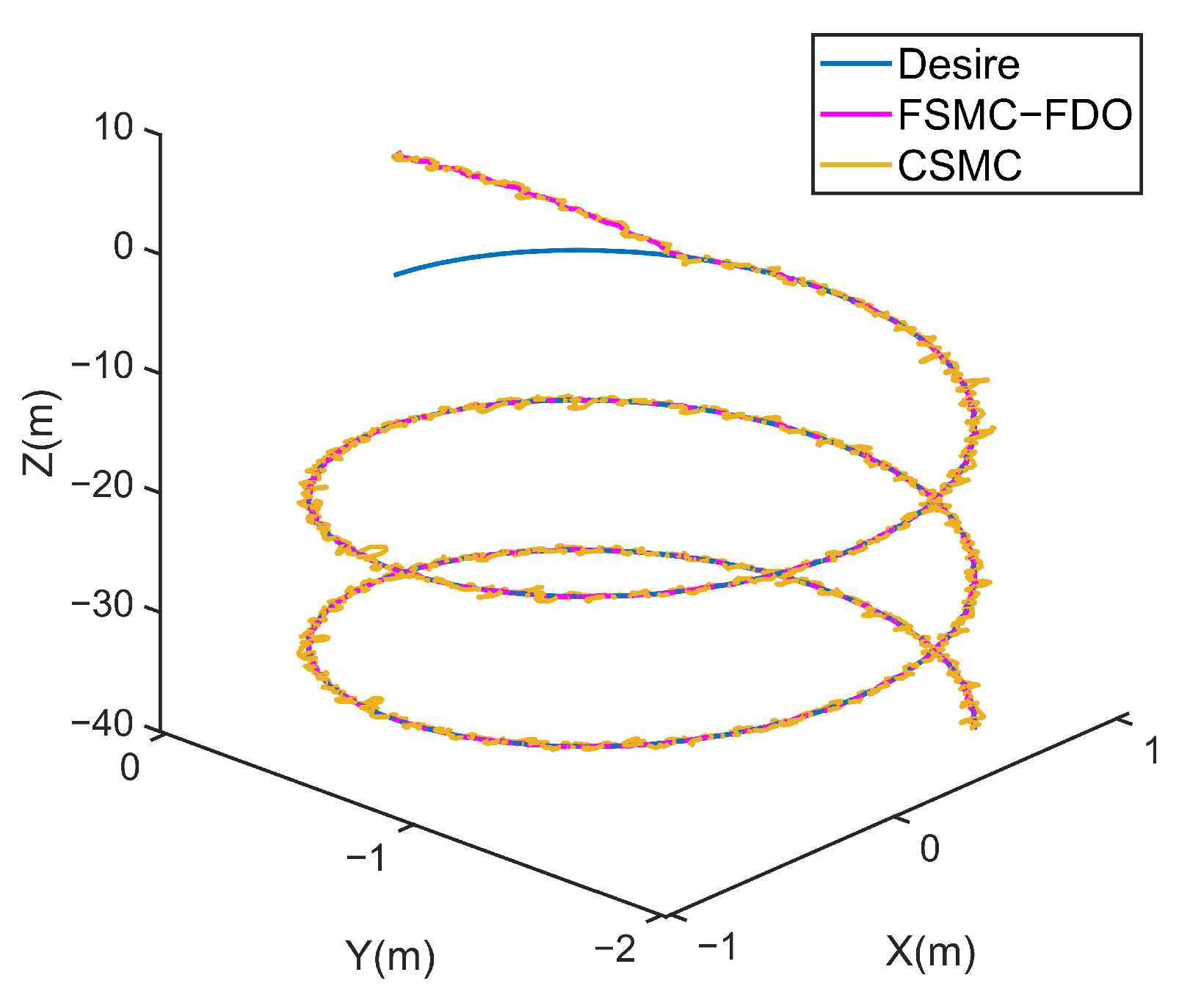
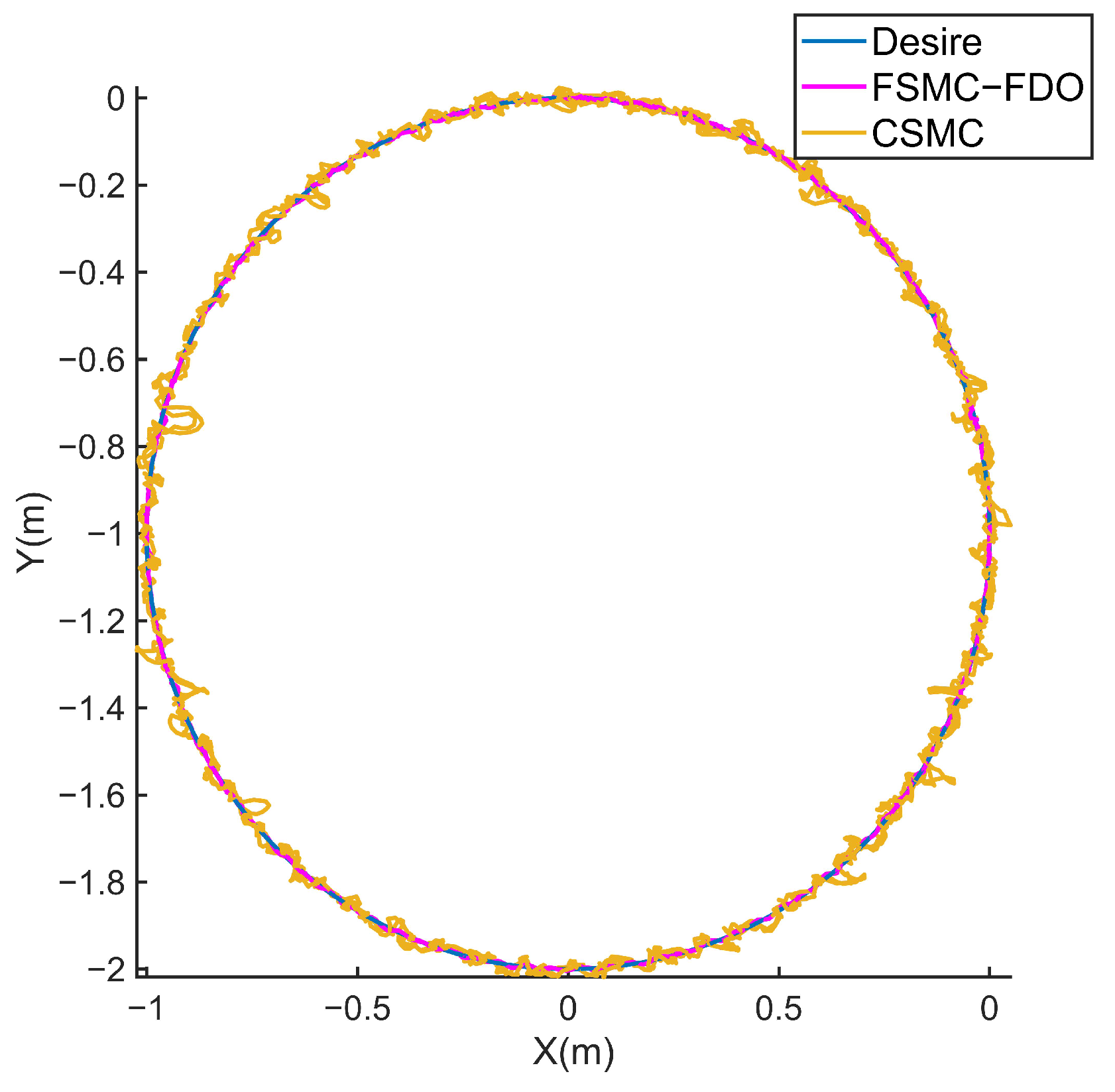
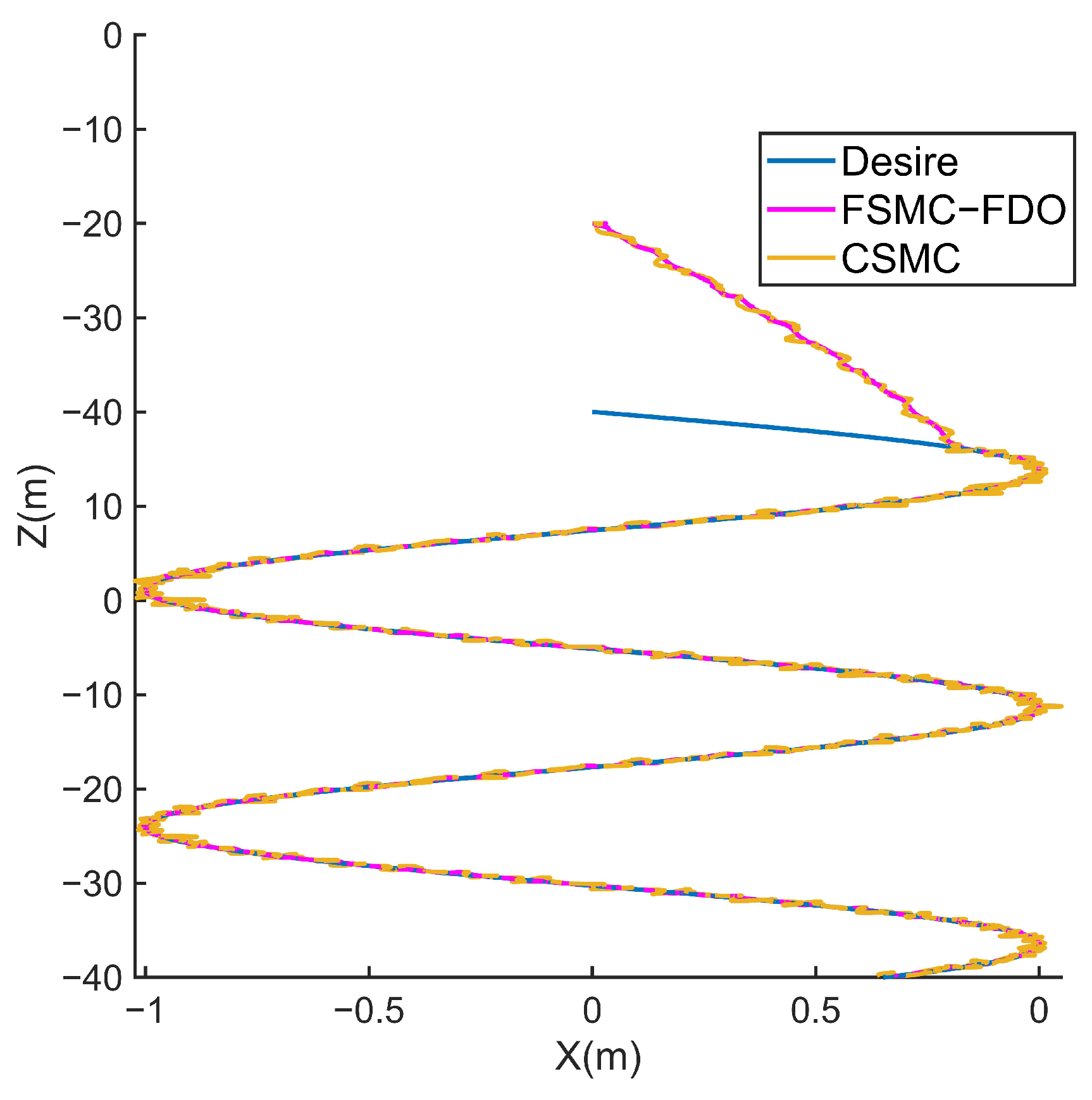
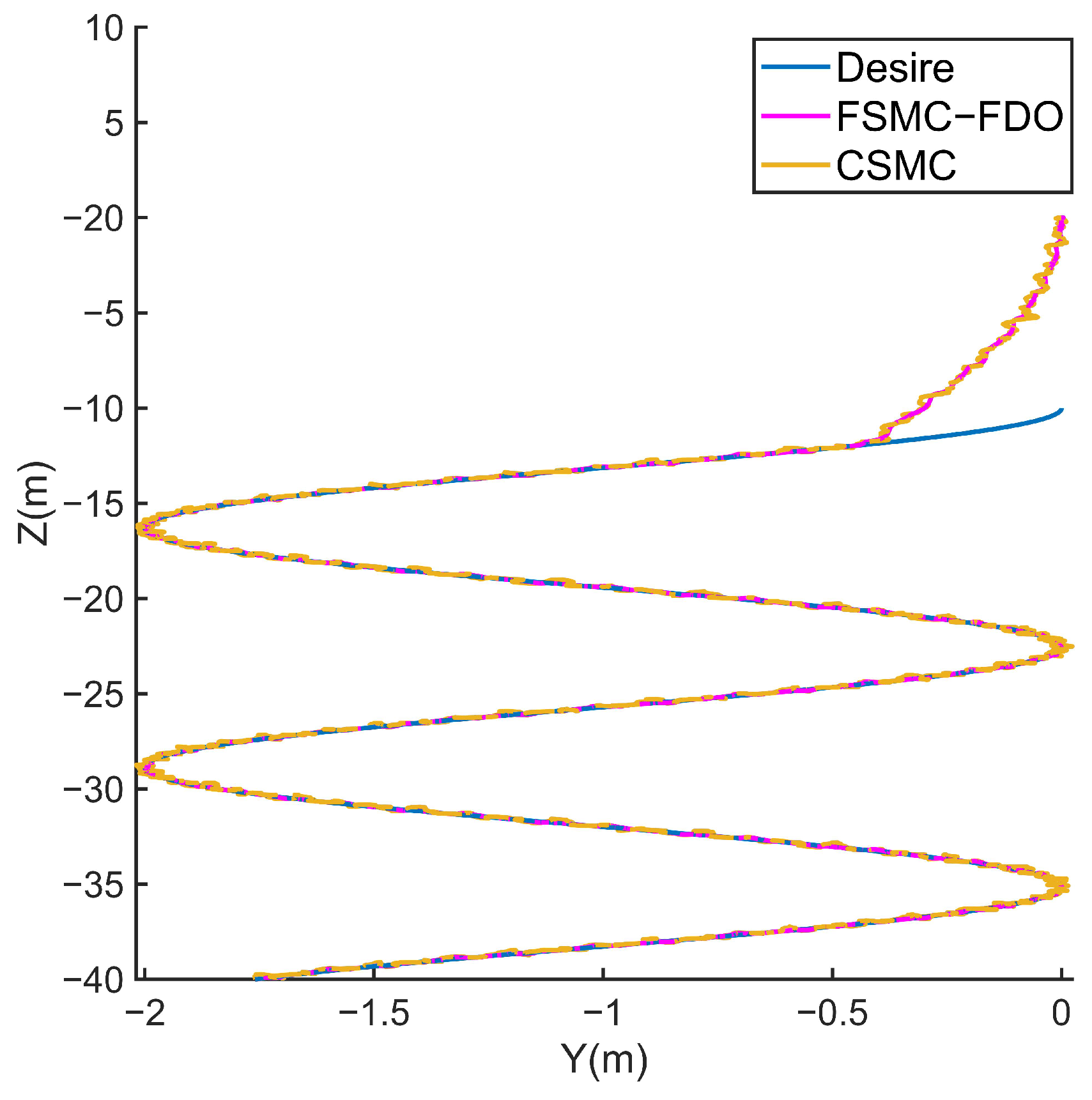
- To demonstrate the superior performance of the FSMC-FDO, a comparative study between the FSMC-FDO and the CSMC trajectory tracking is performed by simulation.
2. Preliminaries and Problem Statement
2.1. Preliminaries
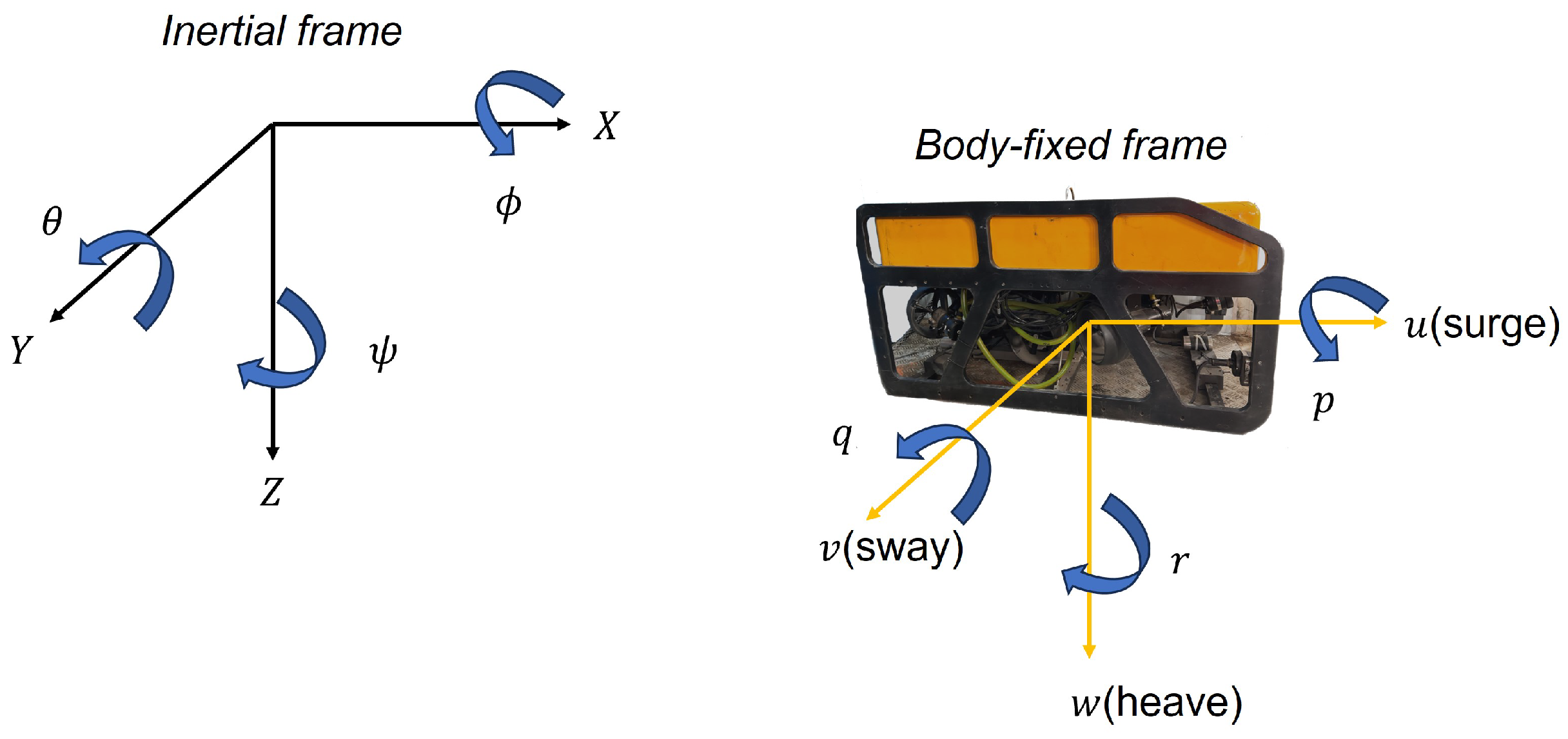
2.2. ROVs Kinematic and Dynamic Models
3. Control Scheme Design
3.1. Sliding Mode Control Scheme Design
3.2. Design and Analysis for the Reaching Law
3.3. Stability Analysis
3.4. Fixed-Time Disturbance Observer
4. Simulation Study and Results Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sahoo, A.; Dwivedy, S.K.; Robi, P.S. Advancements in the Field of Autonomous Underwater Vehicle. Ocean. Eng. 2019, 181, 145–160. [Google Scholar] [CrossRef]
- Zereik, E.; Bibuli, M.; Mišković, N.; Ridao, P.; Pascoal, A. Challenges and Future Trends in Marine Robotics. Annu. Rev. Control 2018, 46, 350–368. [Google Scholar] [CrossRef]
- Kim, M.; Joe, H.; Kim, J.; Yu, S. Integral Sliding Mode Controller for Precise Manoeuvring of Autonomous Underwater Vehicle in the Presence of Unknown Environmental Disturbances. Int. J. Control 2015, 88, 2055–2065. [Google Scholar] [CrossRef]
- Herman, P. Decoupled PD Set-Point Controller for Underwater Vehicles. Ocean. Eng. 2009, 36, 529–534. [Google Scholar] [CrossRef]
- Radmehr, N.; Kharrati, H.; Bayati, N. Optimized Design of Fractional-Order PID Controllers for Autonomous Underwater Vehicle Using Genetic Algorithm. In Proceedings of the 2015 9th International Conference on Electrical and Electronics Engineering (ELECO), Bursa, Turkey, 26–28 November 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 729–733. [Google Scholar]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A.; Campos, E. Saturation Based Nonlinear PID Control for Underwater Vehicles: Design, Stability Analysis and Experiments. Mechatronics 2019, 61, 96–105. [Google Scholar] [CrossRef]
- Lima, G.S.; Trimpe, S.; Bessa, W.M. Sliding Mode Control with Gaussian Process Regression for Underwater Robots. J. Intell. Robot Syst. 2020, 99, 487–498. [Google Scholar] [CrossRef]
- Elmokadem, T.; Zribi, M.; Youcef-Toumi, K. Control for Dynamic Positioning and Way-Point Tracking of Underactuated Autonomous Underwater Vehicles Using Sliding Mode Control. J. Intell. Robot Syst. 2019, 95, 1113–1132. [Google Scholar] [CrossRef]
- Makavita, C.D.; Jayasinghe, S.G.; Nguyen, H.D.; Ranmuthugala, D. Experimental Study of Command Governor Adaptive Control for Unmanned Underwater Vehicles. IEEE Trans. Contr. Syst. Technol. 2019, 27, 332–345. [Google Scholar] [CrossRef]
- Shojaei, K. Three-Dimensional Neural Network Tracking Control of a Moving Target by Underactuated Autonomous Underwater Vehicles. Neural Comput. Appl. 2019, 31, 509–521. [Google Scholar] [CrossRef]
- Liang, X.; Wan, L.; Blake, J.I.R.; Shenoi, R.A.; Townsend, N. Path Following of an Underactuated AUV Based on Fuzzy Backstepping Sliding Mode Control. Int. J. Adv. Robot. Syst. 2016, 13, 122. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.-J.; Ramírez-Rodríguez, H.; Parra-Vega, V.; Sánchez-Orta, A. Fractional Sliding Mode Control of Underwater ROVs Subject to Non-Differentiable Disturbances. Int. J. Control Autom. Syst. 2017, 15, 1314–1321. [Google Scholar] [CrossRef]
- Gao, F.; Pan, C.; Han, Y. Design and Analysis of a New AUV’s Sliding Control System Based on Dynamic Boundary Layer. Chin. J. Mech. Eng. 2013, 26, 35–45. [Google Scholar] [CrossRef]
- Yu, X.; Zhou, B.; Xiong, L.; Jiang, S. Composite Sliding Mode Speed Control for Sinusoidal Doubly Salient Electromagnetic Machine Drives Using Fast-reaching Law and Disturbance Compensation. IEEE Trans. Ind. Electron. 2023, 70, 6563–6573. [Google Scholar] [CrossRef]
- Su, B.; Wang, H.; Li, N. Event-Triggered Integral Sliding Mode Fixed Time Control for Trajectory Tracking of Autonomous Underwater Vehicle. Trans. Inst. Meas. Control 2021, 43, 3483–3496. [Google Scholar] [CrossRef]
- Sakiyama, J.; Motoi, N. Position and Attitude Control Method Using Disturbance Observer for Station Keeping in Underwater Vehicle. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 5469–5474. [Google Scholar]
- Rong, S.; Wang, H.; Li, H.; Sun, W.; Gu, Q.; Lei, J. Performance-Guaranteed Fractional-Order Sliding Mode Control for Underactuated Autonomous Underwater Vehicle Trajectory Tracking with a Disturbance Observer. Ocean. Eng. 2022, 263, 112330. [Google Scholar] [CrossRef]
- Zheng, J.; Song, L.; Liu, L.; Yu, W.; Wang, Y.; Chen, C. Fixed-Time Sliding Mode Tracking Control for Autonomous Underwater Vehicles. Appl. Ocean. Res. 2021, 117, 102928. [Google Scholar] [CrossRef]
- Luo, W.; Liu, S. Disturbance Observer Based Nonsingular Fast Terminal Sliding Mode Control of Underactuated AUV. Ocean. Eng. 2023, 279, 11455. [Google Scholar] [CrossRef]
- Lakhekar, G.V.; Waghmare, L.M.; Roy, R.G. Disturbance Observer-Based Fuzzy Adapted S-Surface Controller for Spatial Trajectory Tracking of Autonomous Underwater Vehicle. IEEE Trans. Intell. Veh. 2019, 4, 622–636. [Google Scholar] [CrossRef]
- Lu, D.; Guo, Y.; Xiong, C.; Zeng, Z.; Lian, L. Takeoff and Landing Control of a Hybrid Aerial Underwater Vehicle on Disturbed Water’s Surface. IEEE J. Ocean. Eng. 2022, 47, 295–311. [Google Scholar] [CrossRef]
- An, S.; Wang, L.; He, Y. Robust Fixed-Time Tracking Control for Underactuated AUVs Based on Fixed-Time Disturbance Observer. Ocean. Eng. 2022, 266, 112567. [Google Scholar] [CrossRef]
- Guerrero, J.; Torres, J.; Creuze, V.; Chemori, A. Adaptive Disturbance Observer for Trajectory Tracking Control of Underwater Vehicles. Ocean. Eng. 2020, 200, 107080. [Google Scholar] [CrossRef]
- Sun, B.; Zhu, D. A Chattering-Free Sliding-Mode Control Design and Simulation of Remotely Operated Vehicles. In Proceedings of the 2011 Chinese Control and Decision Conference (CCDC), Mianyang, China, 23–25 May 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 4173–4178. [Google Scholar]
- Soylu, S.; Proctor, A.A.; Podhorodeski, R.P.; Bradley, C.; Buckham, B.J. Precise Trajectory Control for an Inspection Class ROVs. Ocean. Eng. 2016, 111, 508–523. [Google Scholar] [CrossRef]
- Huang, B.; Yang, Q. Double-Loop Sliding Mode Controller with a Novel Switching Term for the Trajectory Tracking of Work-Class ROVs. Ocean. Eng. 2019, 178, 80–94. [Google Scholar] [CrossRef]
- Soylu, S.; Buckham, B.J.; Podhorodeski, R.P. A Chattering-Free Sliding-Mode Controller for Underwater Vehicles with Fault-Tolerant Infinity-Norm Thrust Allocation. Ocean. Eng. 2008, 35, 1647–1659. [Google Scholar] [CrossRef]
- Vu, Q.V.; Dinh, T.A.; Nguyen, T.V.; Tran, H.V.; Le, H.X.; Pham, H.V.; Kim, T.D.; Nguyen, L. An Adaptive Hierarchical Sliding Mode Controller for Autonomous Underwater Vehicles. Electronics 2021, 10, 2316. [Google Scholar] [CrossRef]
- Tao, G. Model Reference Adaptive Control with L1+α Tracking. Int. J. Control 1996, 64, 859–870. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Yazdanpanah, M.J. Performance Enhanced Model Reference Adaptive Control through Switching Non-Quadratic Lyapunov Functions. Syst. Control Lett. 2015, 76, 47–55. [Google Scholar] [CrossRef]
- Du, P.; Yang, W.; Wang, Y.; Hu, R.; Chen, Y.; Huang, S.H. A Novel Adaptive Backstepping Sliding Mode Control for a Lightweight Autonomous Underwater Vehicle with Input Saturation. Ocean. Eng. 2022, 263, 112362. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| − 36.27 N/s | −6.23 kg | ||
| −43.72 N/s | −9.44 | ||
| −105.29 N/s | −13.53 | ||
| −7.86 N/s | −35.62 | ||
| −8.16 N/s | −10.65 | ||
| −10.21 N/s | −9.23 | ||
| −17.25 kg | −102.32 | ||
| −20.22 kg | 10.13 | ||
| −22.73 kg | 16.48 | ||
| −2.65 kg | 17.52 | ||
| −1.23 kg | m | 23.5 kg |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| x | 14.81% | x | 23.91% |
| y | 11.08% | y | 27.01% |
| z | 2.75% | z | 4.58% |
| 11.19% | 26.22% | ||
| 7.72% | 30.88% | ||
| 2.40% | 40.03% |
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| x | 0.0013 | x | 0.0131 |
| y | 0.0094 | y | 0.0032 |
| z | 0.3497 | z | 0.3829 |
| x | 0.0022 | x | 0.0180 |
| y | 0.0040 | y | 0.0116 |
| z | 1.4884 | z | 1.4901 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, H.; Mu, X. Trajectory Tracking Control of Remotely Operated Vehicles via a Fast-Sliding Mode Controller with a Fixed-Time Disturbance Observer. Appl. Sci. 2024, 14, 2533. https://doi.org/10.3390/app14062533
Zhou H, Mu X. Trajectory Tracking Control of Remotely Operated Vehicles via a Fast-Sliding Mode Controller with a Fixed-Time Disturbance Observer. Applied Sciences. 2024; 14(6):2533. https://doi.org/10.3390/app14062533
Chicago/Turabian StyleZhou, Huadong, and Xiangyang Mu. 2024. "Trajectory Tracking Control of Remotely Operated Vehicles via a Fast-Sliding Mode Controller with a Fixed-Time Disturbance Observer" Applied Sciences 14, no. 6: 2533. https://doi.org/10.3390/app14062533