1. Introduction
Lower limb knee–ankle prostheses are commonly used devices that can effectively assist above-knee amputees in completing their basic daily activities and lead to significant social and economic benefits. Intelligent prostheses can actively perform the relevant actions and allow the prosthetic side to match the healthy side better [
1,
2,
3]. The joint biomechanical characteristics of prosthetics are designed to be more in line with the characteristics of healthy people, ensuring safety and comfort during walking. Prostheses remain in close contact with the wearer, which is an important application in the field of human–robot interaction (HRI). While the development of intelligent technology has improved the performance of such systems to a certain extent, it still has limitations in dynamic and complex environments and tasks [
4]. One aspect is the research on controllers, with user comfort as the core. Current prosthetic research primarily focuses on achieving prosthetic control performance, often overlooking the crucial aspect of comfort. Research should prioritize comfort as the main indicator. Secondly, there is the accurate expression and recognition of the wearer’s motion intent. The wearer’s subjective will should serve as the primary source of control commands in the human–prosthesis interaction system. Therefore, it is essential to accurately determine the wearer’s current motion intent and design appropriate intent command information to transmit to the prosthetic controller.
The kinematic estimation of a prosthesis involves calculating and optimizing its motion trajectory based on information about the user’s intentions and motion states. This ensures that the prosthesis matches the gait cycle and stride length of healthy individuals, while also avoiding noticeable impacts or vibrations that could make the walking process uncomfortable. To achieve this, a kinematic model is established for both the prosthesis and the human body, allowing for the position and attitude of the prosthesis to be calculated based on the corresponding phase variables. Additionally, the model needs to be able to adapt to changes in walking speed and slopes, dynamically adjusting the motion trajectory of the prosthetic limb according to the real-time speed and slope information collected.
Previous studies have shown that different gait speeds and slopes during walking can change the gait trajectory shapes [
5,
6,
7]. While gait information can be collected through experimental measurement at various speeds and slopes, this method results in a discontinuous database relative to the task variables and requires a large amount of data to be collected, making it unsuitable for human experiments. Therefore, it is necessary to build a continuous model of gait kinematics to enable adaptive adjustment to the expected kinematic trajectory during walking.
Studies in the field of prosthetic control generally adopt three-layer control structures [
8], with the upper layer detecting the wearer’s intention and determining the walking state. The middle layer generates the desired joint trajectory, and the lower layer controls the actuators to the desired position or torque. In 2016, Gregg’s team proposed a gait kinematics modelling method based on the virtual constraint control method. This method considers walking state differences, such as changes in speed and slope [
9], and models gait kinematics as a continuous function of gait phase, walking speed, and ground slope. The virtual constraint controller provides the required trajectories over continuous gait stages and movement patterns. In 2017, the team clarified the definition of task function in the optimization algorithm [
10], and introduced model order reduction, motion range restriction, and anti-jitter into the algorithm. In 2021, the team further analyzed the potential sources of prediction errors, which were deviations from the average kinematics [
11].
The main method of prosthetic control is based on gait phase, including time-based control [
12,
13,
14], echo control [
15], central pattern generator-based control [
16,
17,
18], finite state impedance (FSM) control [
19,
20,
21,
22,
23,
24,
25], and more. The FSM control method is a more human-like control method based on kinematics. By simulating joint motion at different stages as a spring-damping model, it can better simulate the biomechanical characteristics of human leg joints, possessing similar stiffness and viscosity to the human leg. The position of the gait state machine is determined based on the gait event, and different impedance control parameters are designed for each state. However, the discrete gait stage increases the difficulty of achieving state classification and smooth switching, and many control parameters need to be adjusted manually. This study uses a prosthetic prototype that utilizes a continuous phase variable control method to address these issues. The prototype calculates the continuous phase variable based on the inertial measurement unit (IMU) sensor placed on the front of the thigh, allowing for overall gait planning and flexibility control of the entire gait.
Individual models are designed for different wearers based on their movement patterns and characteristics, which can effectively enhance the stability and comfort of wearing prosthetics. In order to achieve an individual optimization method, it is crucial to study the desired joint kinesiology. Gregg’s team adjusted the benchmark model to create an individual modelling method using the gait kinematics modelling approach [
9,
11,
26]. This method involves having the user walk for a certain distance at a certain speed on a flat surface, and calculating the deviation from the benchmark model of flat surface walking (which is the average model of multiple experimenters). This method can adjust the model parameters for all velocities and slopes using only one experiment. However, it is important to note that the deviation from the reference model may vary after a change in motion conditions, and the theoretical basis of the method needs to be further studied. Moreover, for amputees, the model cannot be modified by walking naturally on level ground. For prosthetic control, this kinematic fitting and individualization approach needs to be adjusted.
Therefore, a kinematic estimation model with varying speeds and slopes is proposed, which can achieve trajectory estimation for the whole gait cycle and provide the desired control target for the middle and lower layers of the prosthetic controllers.
Section 2 introduces the prosthesis prototype and the phase variable calculation.
Section 3 describes the detailed methods of kinematics estimation.
Section 4 outlines the experiments based on the gait data set.
Section 5 and
Section 6 provide the discussion and conclusion.
3. Adaptive Kinematic Estimation Method
This section describes the adaptive kinematic estimation method.
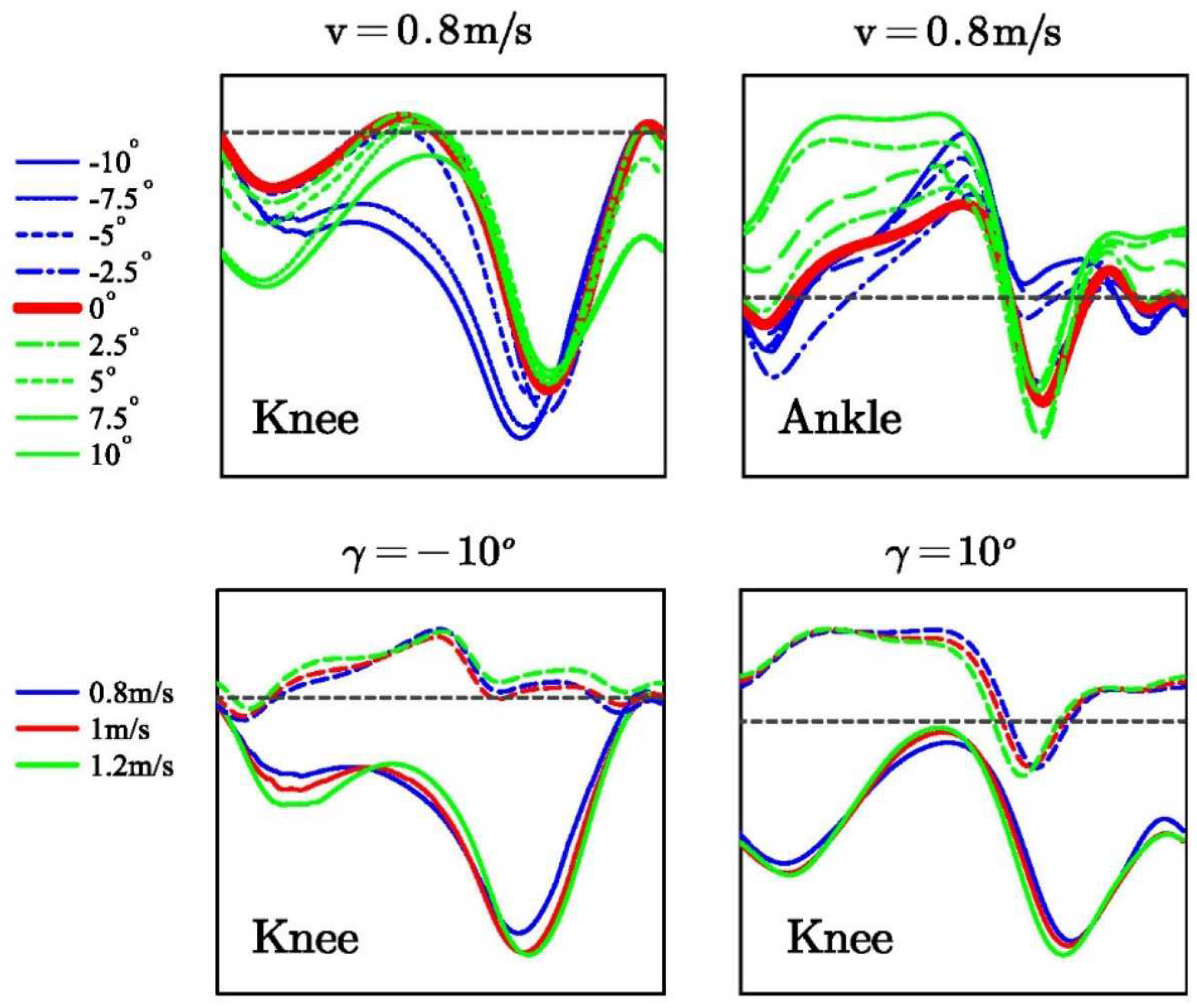
Figure 2 shows knee and ankle angles under varying slopes and constant speed, and the knee angle at different speeds with slopes of −10° and 10°.
When the task variables change, the joint angle also changes accordingly. As the walking speed increases, the maximum swing angle of the knee and ankle joints increases, allowing for a larger stride length in the same amount of time. This shortens the duration of the support period and increases the proportion of the swing period in the gait cycle. When walking on a slope, the knee and ankle joint angles undergo a larger deformation compared to walking on flat ground. At the end of the support phase, the ankle joint transitions from dorsiflexion to plantar flexion when walking uphill. This helps the body overcome gravity and move forward and upward, and results in an increase in the percentage of knee joint flexion time and ankle joint plantar flexion time, showing a state of propulsion. Conversely, when walking downhill, the percentage of knee flexion time decreases and the plantar flexion of the ankle joint increases with the increase in the slope angle.
3.1. Kinematic Estimation Problem Description
In our previous work, we used the Gaussian process (GP) to fit a single-motion trajectory [
27]. However, we observed that adaptability to speed and slope was weak. When the walking speed changes, the motion trajectory also changes, and, for different users, the joint kinematics have personalized characteristics that cannot be adjusted accordingly. We also found that the GP curve-fitting method has some disadvantages, such as high computational complexity, which increases with the amount of data and requires a lot of computational resources. Additionally, the choices of kernel functions and hyperparameters affect the fitting effect, which requires a lot of experience and debugging. Furthermore, a large amount of sample data is required, which is not feasible for experiments involving human subjects. Therefore, we developed an adaptive kinematic trajectory estimation algorithm for speed and slope that can be used for subsequent personalized adjustment.
The function for the kinematic modeling of a joint with velocity and slope adaptation is expressed as the following function of the angle of the knee and ankle, with respect to the velocity variable
, slope variable
, and phase variable
:
where
and
are the function relationships between the knee and ankle joint angles and the phase variable
.
and
represent the expected prosthetic joint angles calculated by the gait kinematic model. A unified expression of
is used in the following section.
A method based on task function weights was proposed in [
10], and the gait model was modeled as a basis function with
as a variable, and a task function with
and
as variables. Although changes in velocity and slope will lead to changes in kinematic trajectory, there is a basic trajectory shape; the basis function represents the invariant part of the trajectory, while the changes caused by the changes in velocity and slope are reflected in the task function. Thus, the angle expression is as follows:
where
is an F-order Fourier series with
,
is a task function with task variables
and
, and
is the number of basis functions. We set
when
. When
, the slope variable is 0 and the basis function is weighted by the velocity variable. When
, slope variables are used to weigh the basis function. It can be seen that if
, the unknown parameters of each basis function are
, and the total number of unknown parameters in the model is
. Due to the large data volume and high computational difficulty, the decipherability of parameters is not exact, and there are certain difficulties in the subsequent adjustment of the model.
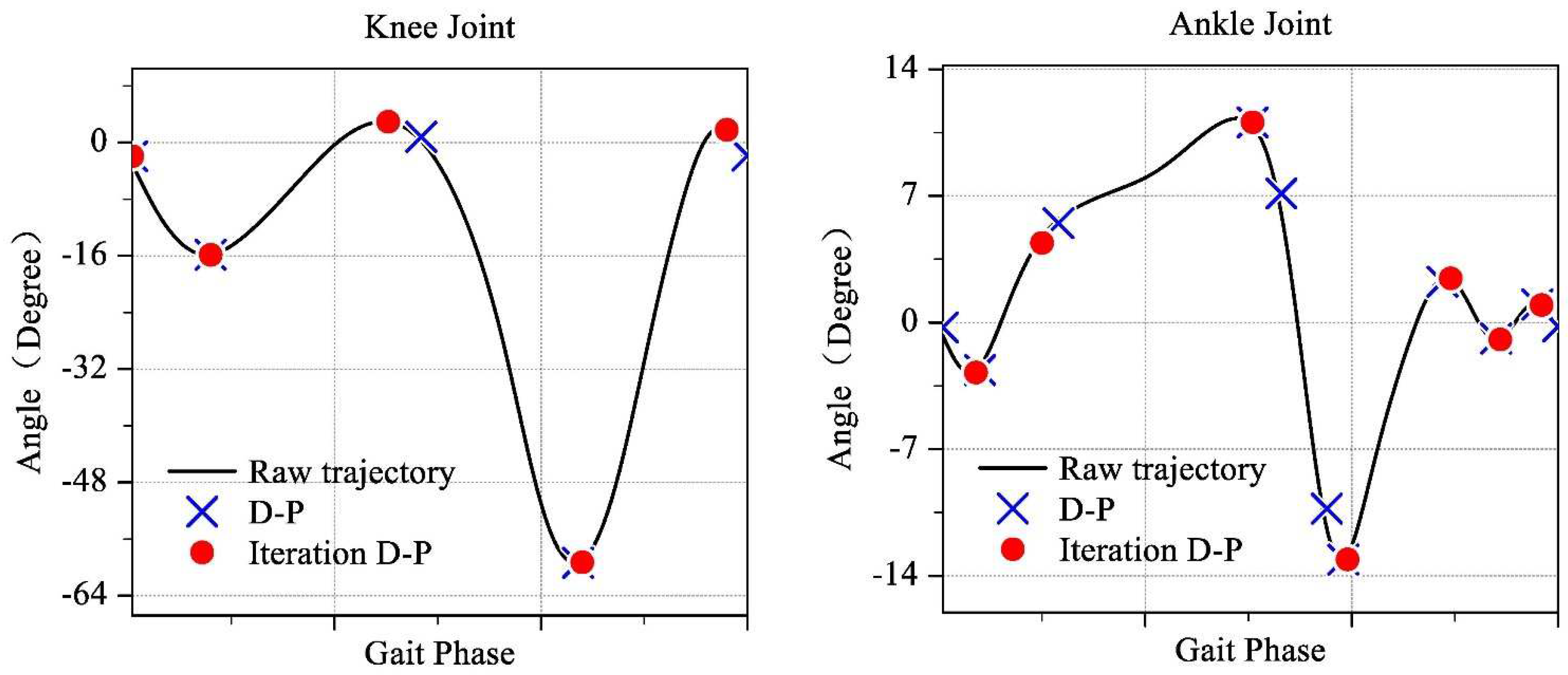
3.2. Key Point Extraction Based on D-P Iteration
Key points can summarize the basic shape of the kinematic curve and affect the trend of the curve. Although the positions of the key points may vary with factors such as individuals’ height and weight, the curves follow a general pattern, with the key points changing within a certain range. Initially, the key point positions of the average gait model are determined, and personalized methods can be subsequently employed for further optimization [
27]. The core idea of extracting feature points is to reduce the number of nodes with the premise of maintaining the curve shape characteristics as much as possible. At present, the methods for extracting feature points include vertical distance, slope, angle, etc. The Douglas–Peucker (D-P) extraction algorithm is a commonly used method based on the vertical distance method. The idea is to set the threshold in advance, and then compare the vertical distance of the line from the point on the curve to the first and end points of the curve with the size of the given threshold.
Obviously, the accuracy of the D-P algorithm is related to the chosen threshold. The larger the threshold, the greater the degree of simplification and the fewer key points. On the contrary, the lower the degree of simplification, the more key points, and a curve that is closer to the full shape. The algorithm is prone to the loss of some important feature points when the curvature is large, and to the retention of non-feature points when the bending horizontal distance is small. Therefore, an improved iterative D-P key point extraction method is proposed in this section, which can adaptively extract the global key points of the curve.
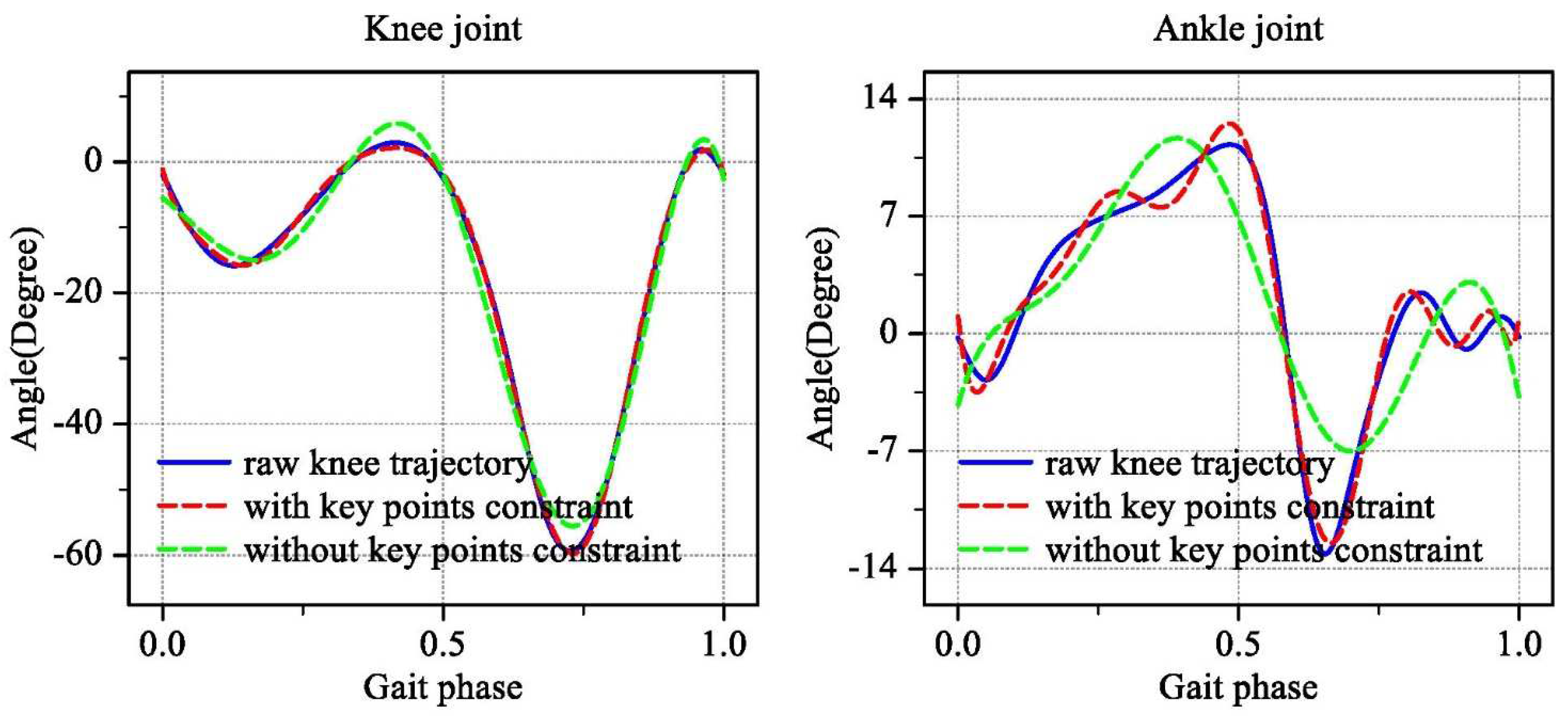
3.3. Invariant Basis Function Estimation Considering Key Points Constraints
The basis function is defined as the gait trajectory with
under a speed of 1 m/s and a slope of 0, expressed as follows:
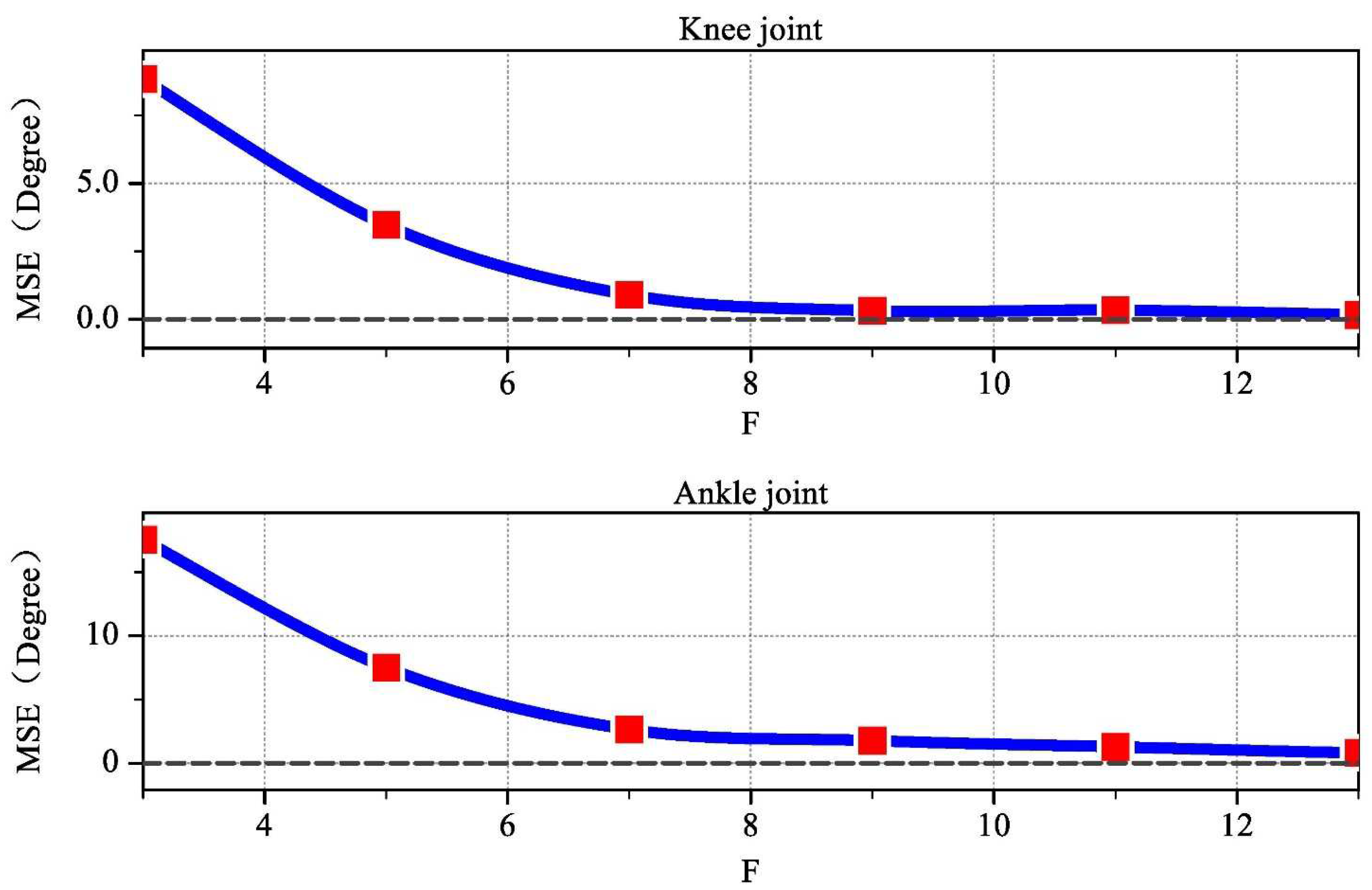
The invariant basis function is fitted by Fourier series, whose expression is as follows:
where the coefficient matrix
is the order of the Fourier series. Generally, the larger the
is, the better the fitting effect of the specified points is, but it is more likely to cause overfitting.
The first goal of fitting is to fit all data points; on the other hand, the accuracy of fitting key points should be ensured as much as possible. Therefore, the convex optimization method is used to estimate the Fourier coefficient matrix. The form of convex optimization is as follows:
where
is the
sampling point of the original trajectory,
is the estimated result, and
is the standard error of the original data. Similarly,
is the
jth key point, and
is the key point position of the estimated result.
and
are the optimization targets indicating that the estimated error is as small as possible, and
is the number of key points of the current curve.
and
are weighted by the proportional coefficient
to create a bias between the curve global domain and the key point domain.
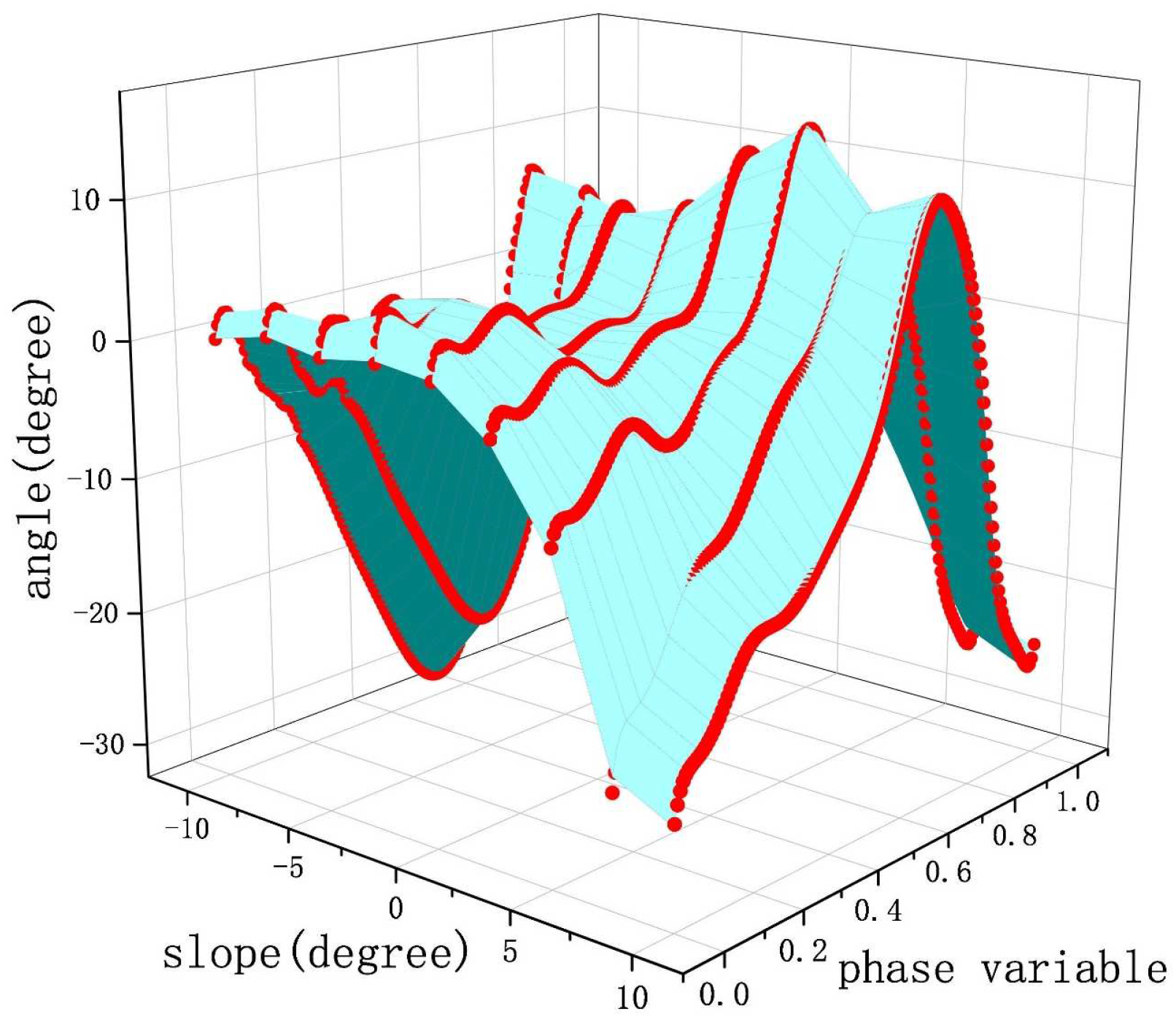
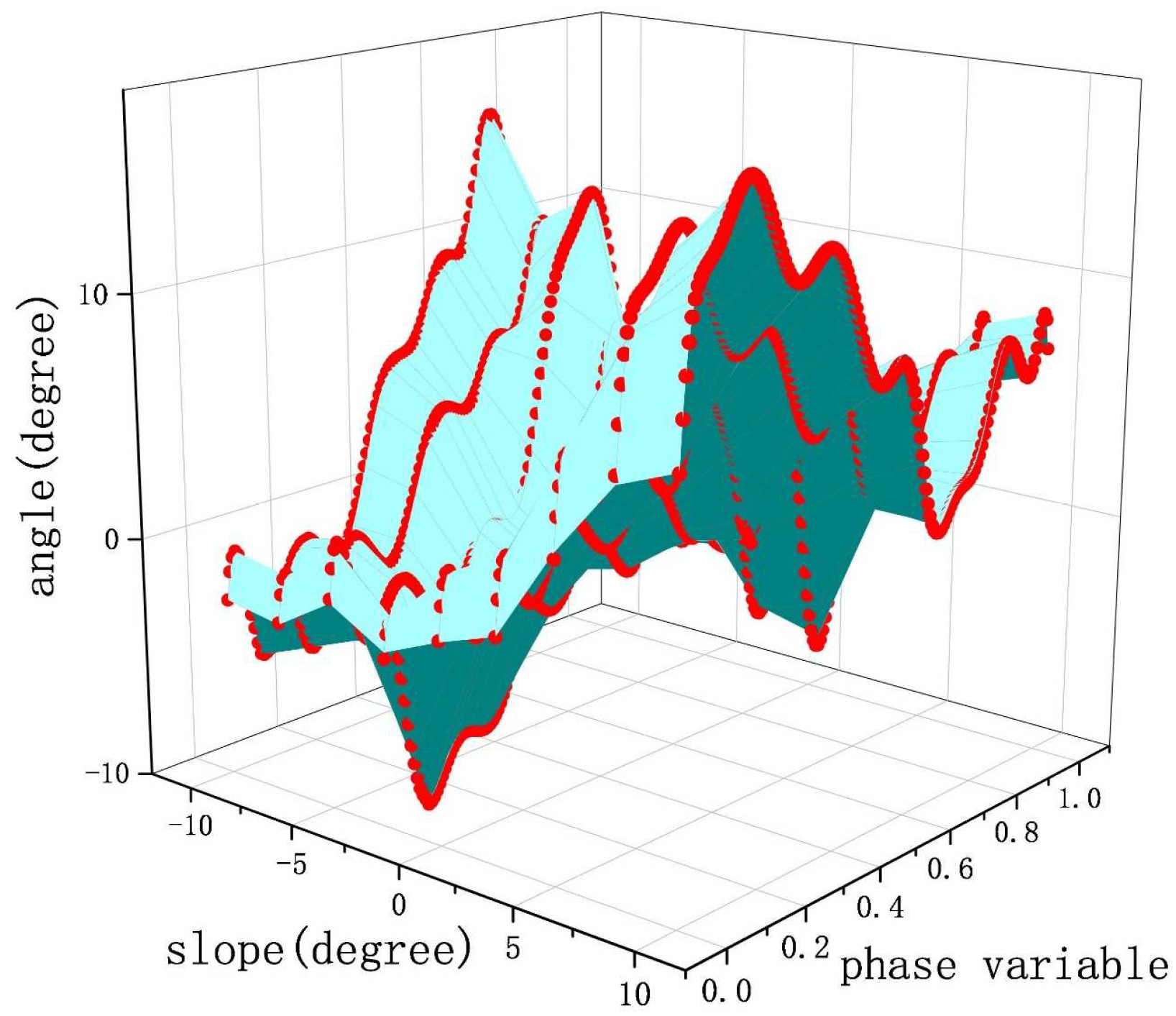
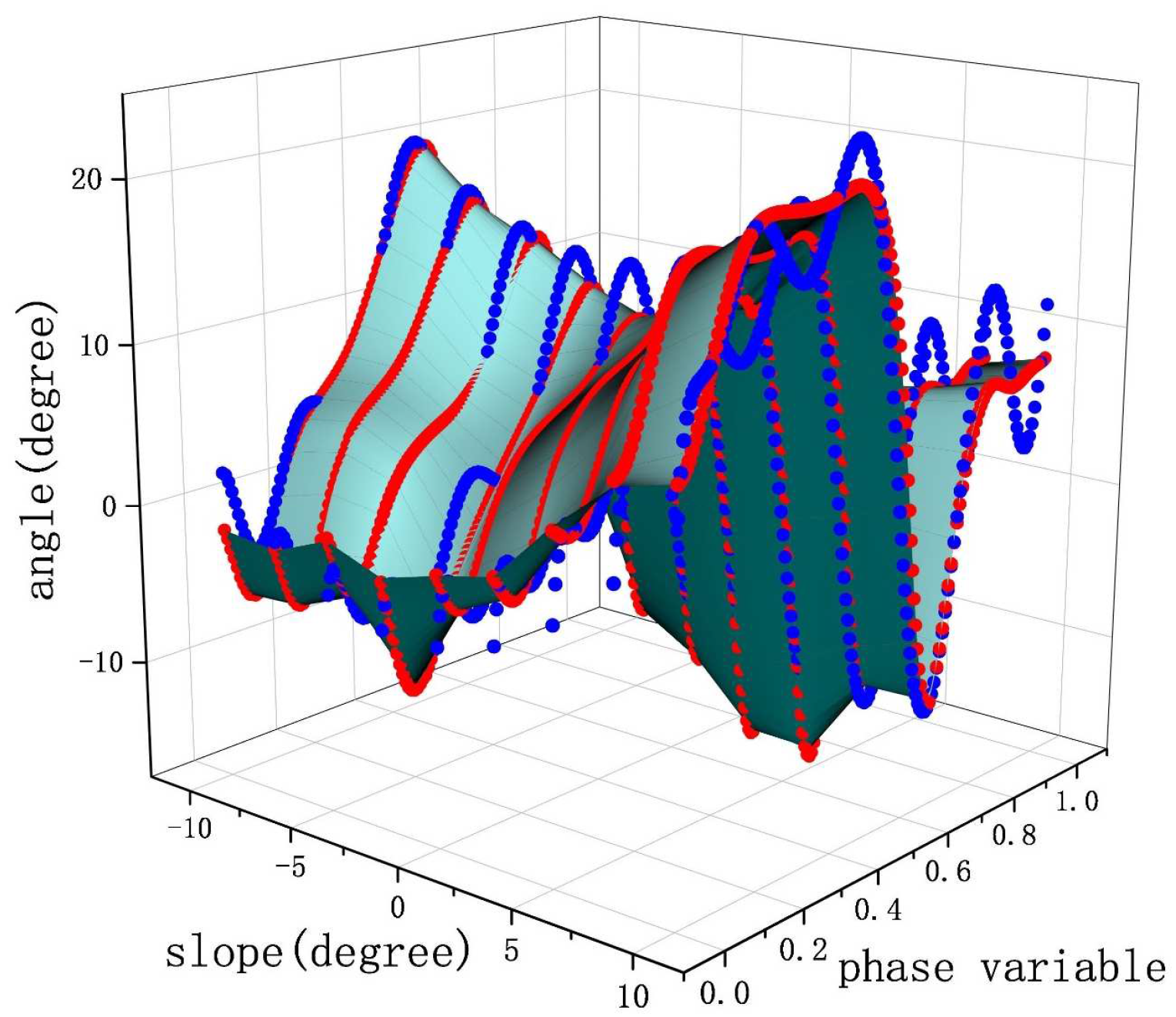
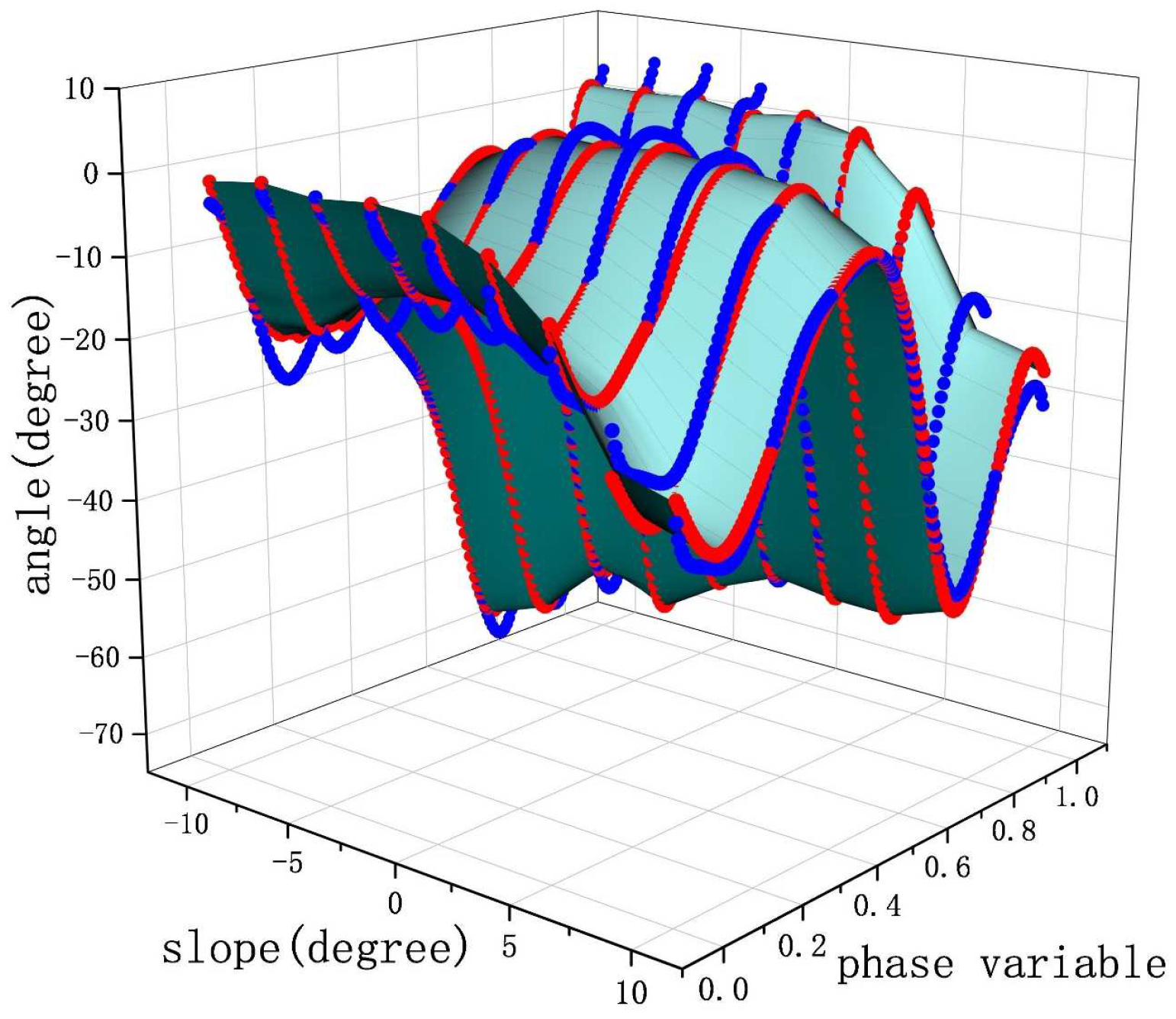
3.4. Adaptive Task Function Estimation Based on RBF Neural Network
The purpose of the task function is to enable the kinematic model to adaptively generate the expected motion trajectory of the joint according to the current task, so as to provide more reasonable guidance for the prosthetic controller. The task function represents the function of the task vector
, where
is the forward velocity of the subject. The task vector matrix
can be expanded according to the specific requirements to cope with more changes in walking conditions, such as standing or sitting. The desired task function can be calculated by the following:
where
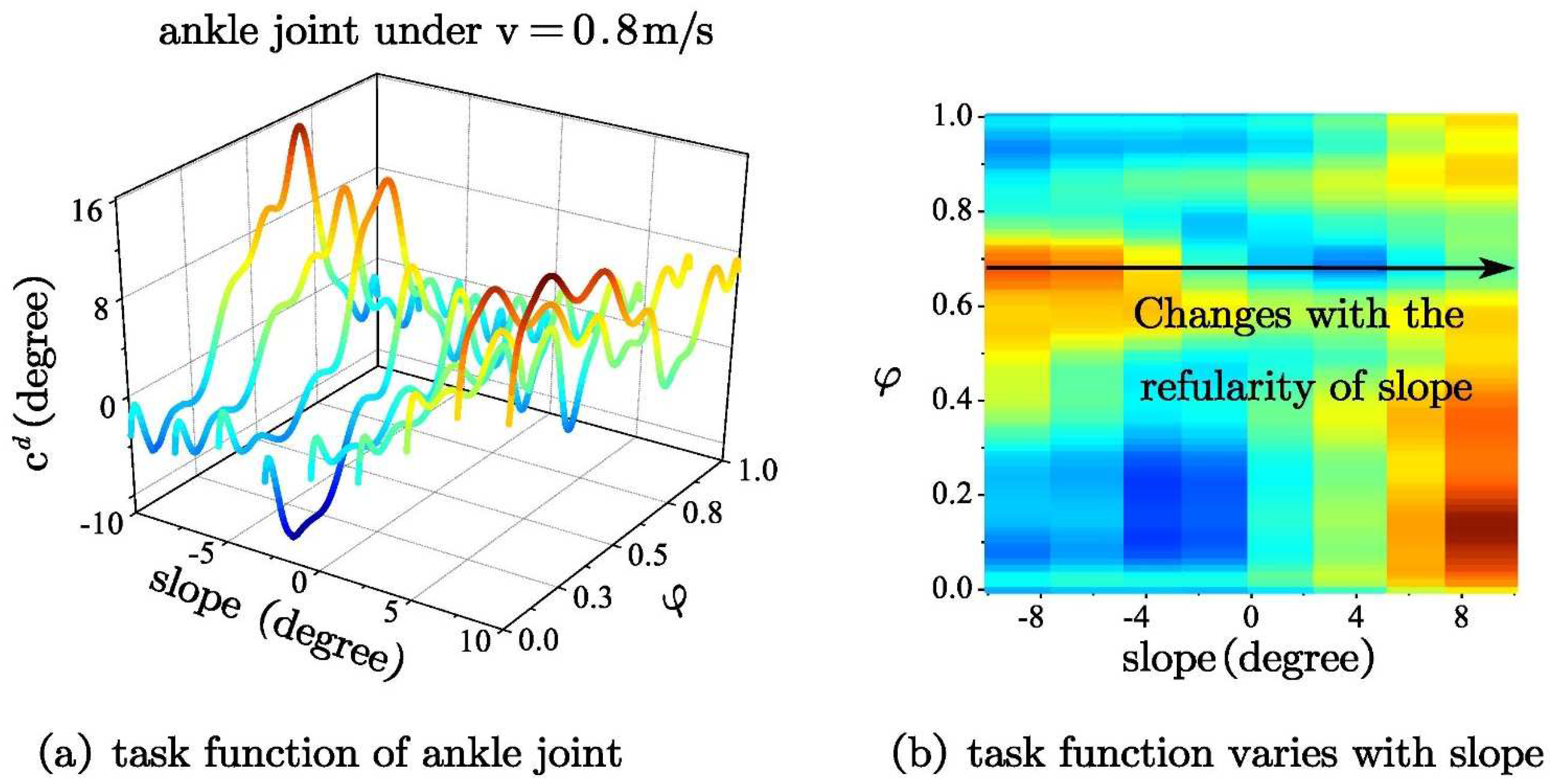
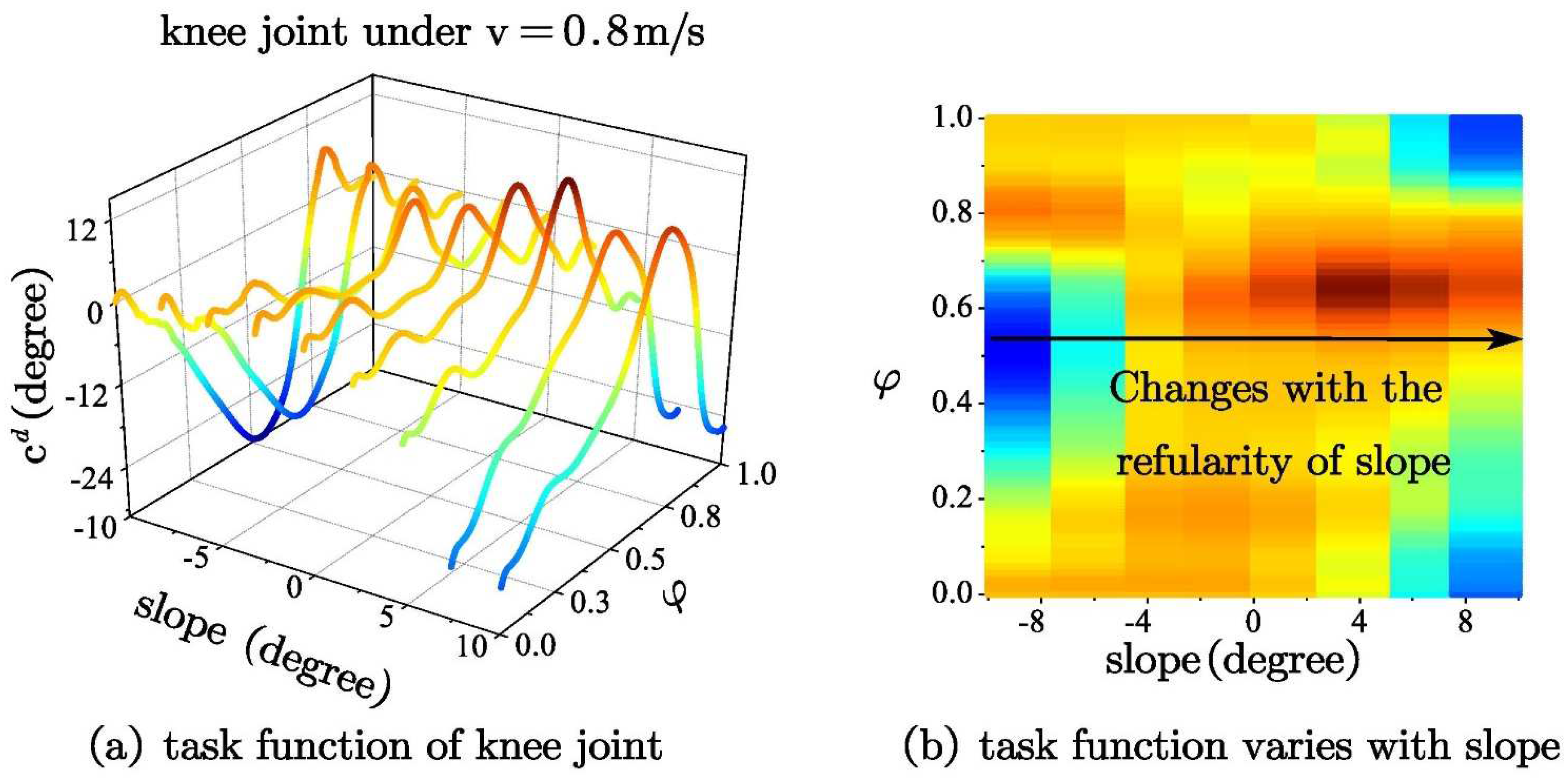
is the expected trajectory provided by the data set. As shown in
Figure 3 and
Figure 4, the obtained surface of the task function changing with slope at the three speeds shows that the value of
is correlated with the change in slope in each phase variable dimension and presents a nonlinear change trend.
In this study, a radial basis function (RBF) neural network was used to fit the task function. RBF is a kind of feedback neural network with good performance, which is suitable for solving nonlinear problems. The basic idea is to transform the input vector by introducing the radial basis function as the activation function of the hidden layer neuron, and transform the low-dimensional input data into a high-dimensional space, so that the neural network can better approximate the nonlinear function. The input vector is
, and the radial basis vector is
, where
is the following Gaussian basis function:
where
is the center vector of the
jth node of the network. When the base width vector of the network is set to
,
is the base width function of node
. The weight vector is
. The resulting output is as follows:
According to the gradient descent method, the iterative algorithm of the output weight, node center, and node base width parameters are as follows:
where
is the learning rate and
is the momentum factor.
5. Discussion
5.1. The Advantages of the Kinematic Estimation Method
Upon theoretical analysis and experimental verification, this study’s proposed kinematic estimation method based on the key points has the following benefits:
(1) This method is designed to obtain a global continuous kinematic model with limited gait database data. Human experimental data are limited, making it impossible to obtain gait data for arbitrary continuous speeds and slopes. This method builds a kinematic model using the limited data and estimates the unknown gait between experimental data based on the regular differences caused by speeds and slopes. Gait kinematics are divided into two parts: the invariant basis function and task function. Fitting and estimation are carried out, respectively, to reduce the complexity of the model and the difficulty of the calculation.
(2) A new method has been proposed to estimate the key points of the gait model. The improved iterative D-P algorithm automatically locates these key points and introduces the constraint of the key points into the basis function solution. The use of the key points in the basis function has several advantages. Firstly, it ensures that the key points, which determine gait characteristics, are retained to ensure that the same action is performed with the reference gait in the key gait phases. This helps to improve walking comfort and stability. Secondly, individualization is usually a difficult problem to solve in prosthetic control. However, the gait differences of different people can be reflected by the key points, which makes it an effective and concise method to adjust the basis function through the key points.
(3) The RBF neural network is used to estimate the task function, adaptively adjust the network model, and build an adaptive estimation method for speeds and slopes with high estimation accuracy.
5.2. Future Works
Our research method requires further work to be carried out. The first step is to study the individual optimization method based on the invariant basis function using the key points. In our previous work, an individual control method based on gait trajectory key points was raised [
27]. The next step is to build a regression model based on the wearer’s individual characteristics such as their height and weight. The individual model will be updated through the active feedback of the user. The kinematic model will then be used to provide a trajectory reference for the underlying control of the prosthetic limb. The dynamic control method of the prosthesis will be studied using compliant control methods such as impedance control. Finally, the performance of the prosthetic prototype and control methods will be verified by conducting experiments on amputee patients.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}