
Optical Design and Stray Light Analysis of Underwater Spectral Radiometer

Abstract
:1. Introduction
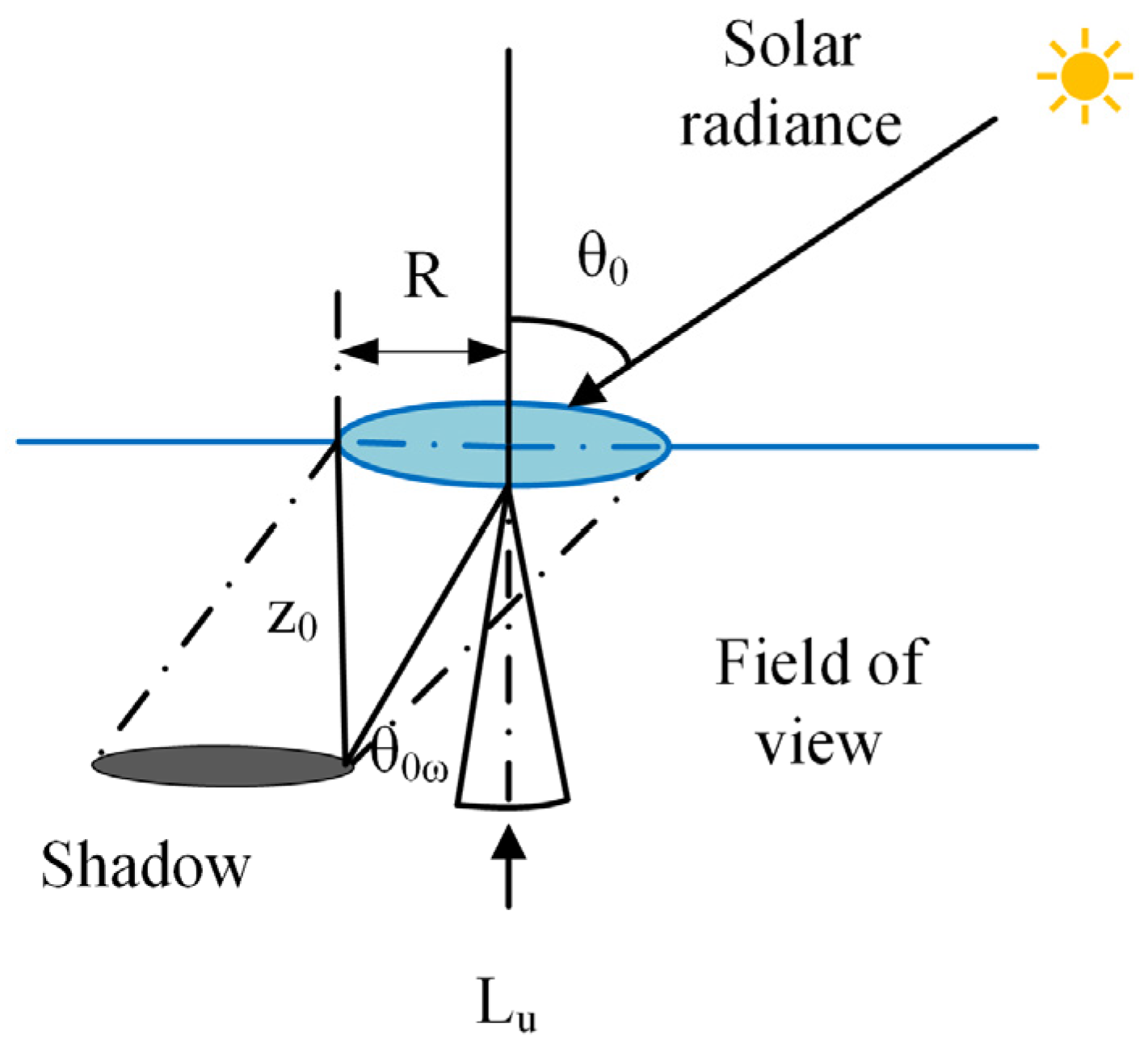
2. Theoretical Foundation
3. Underwater Spectral Radiometer Design
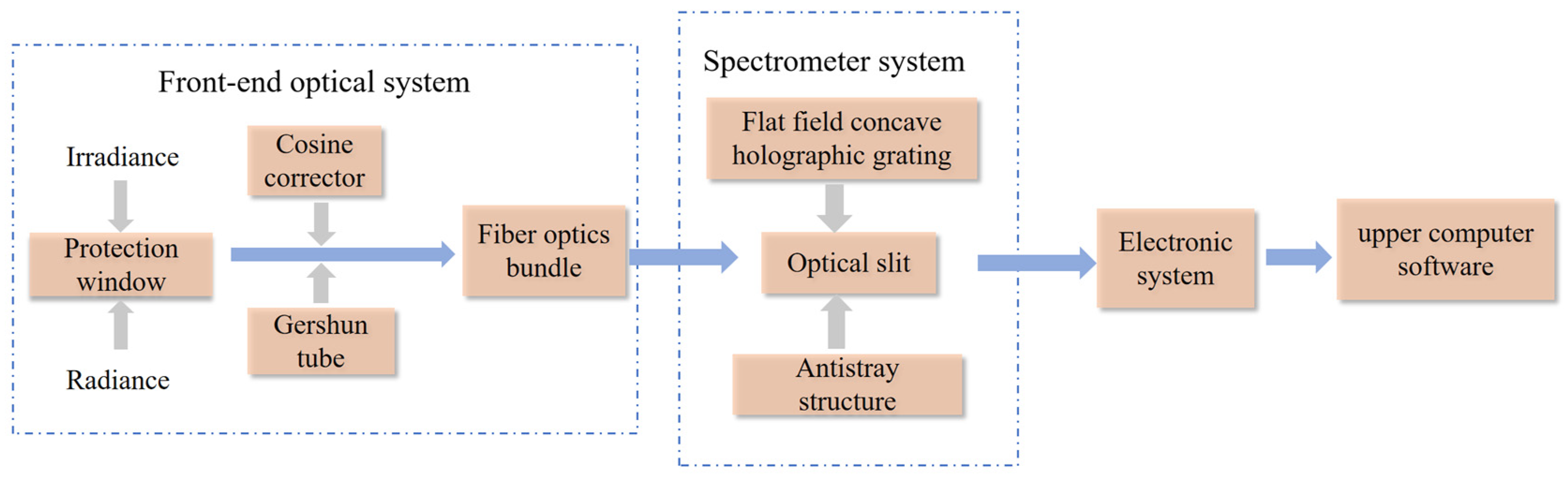
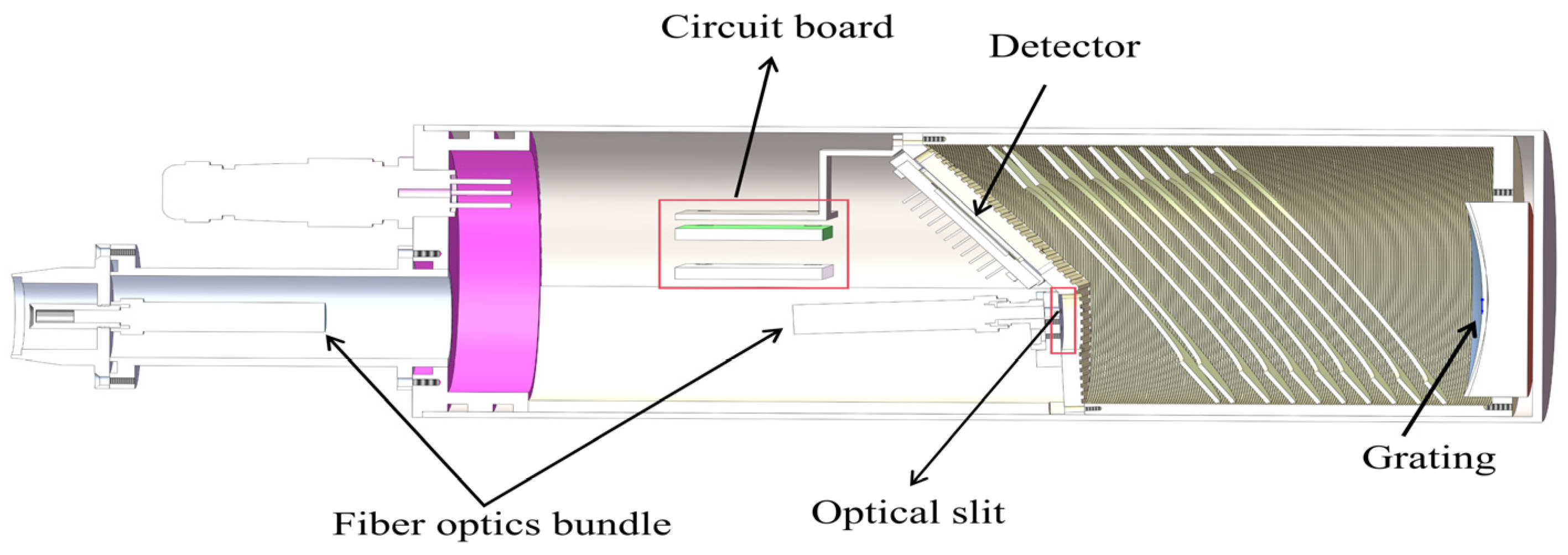
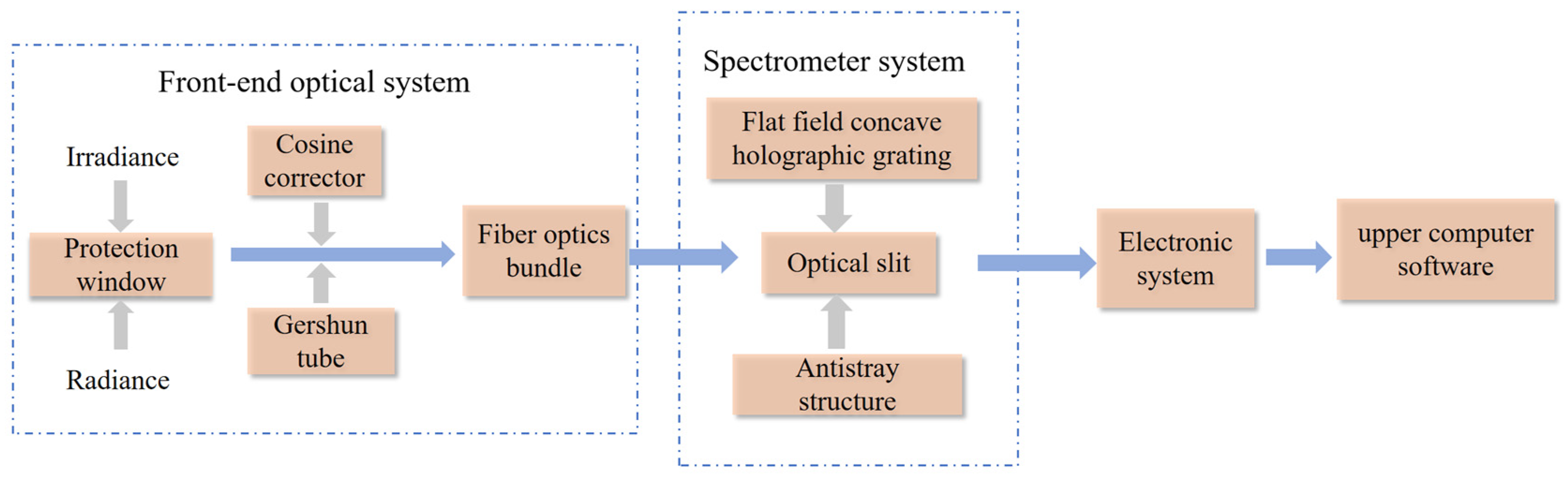
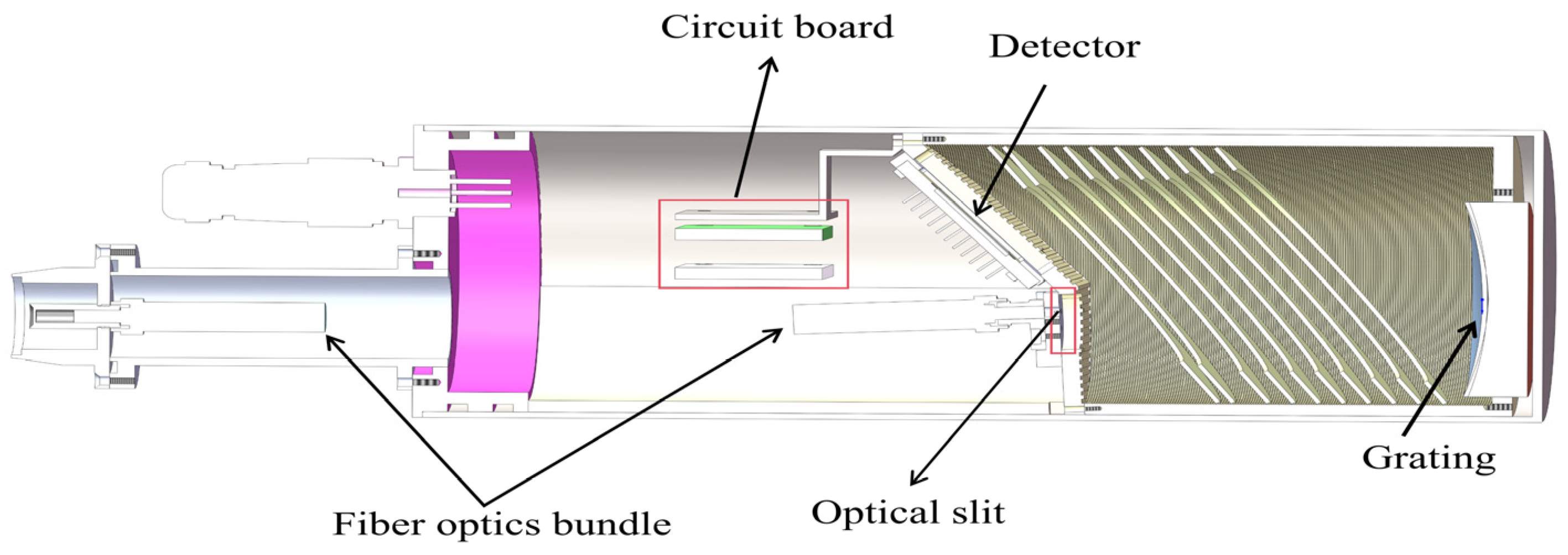
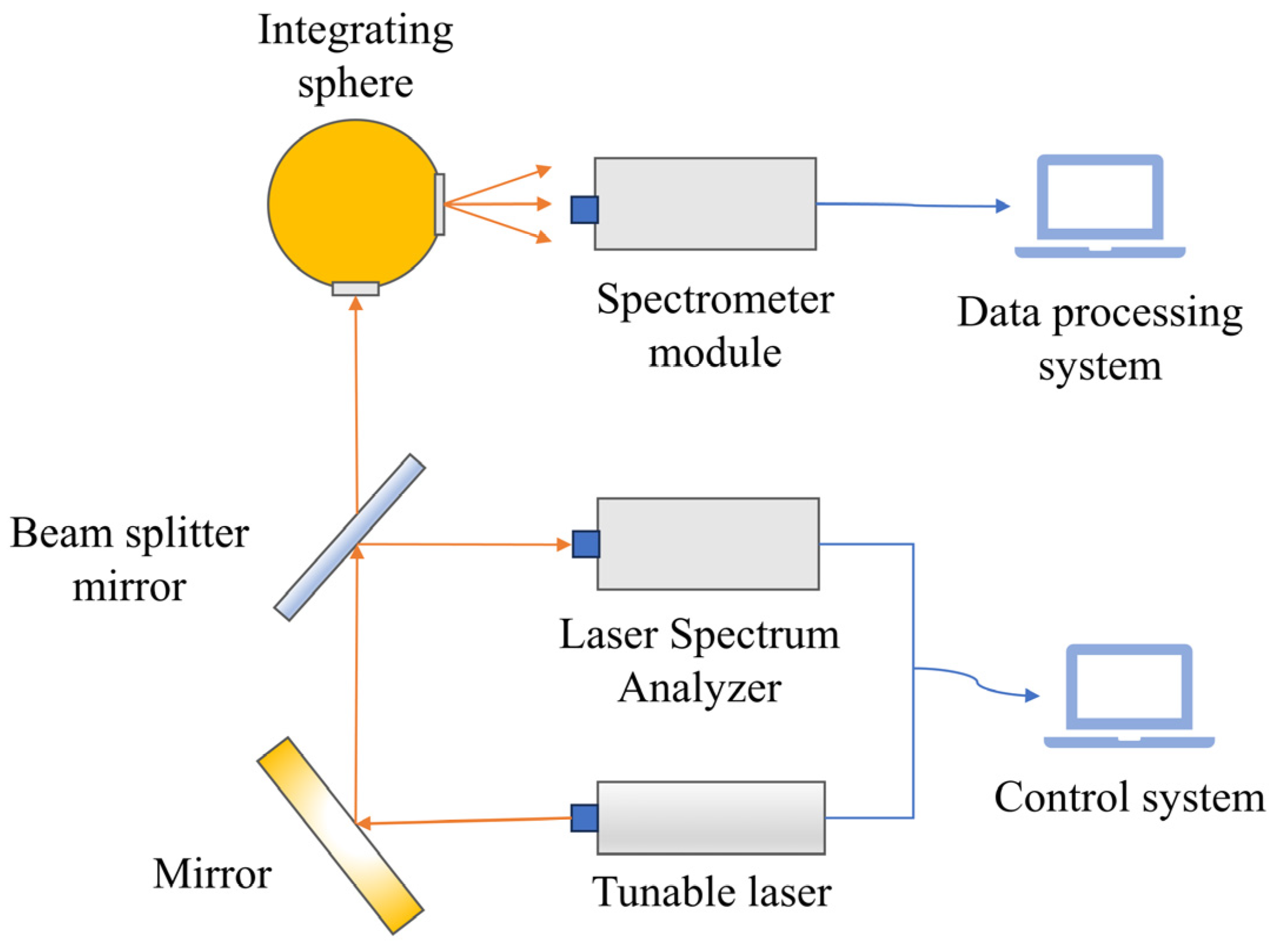
3.1. Overall Design
3.2. Front-End Optical System
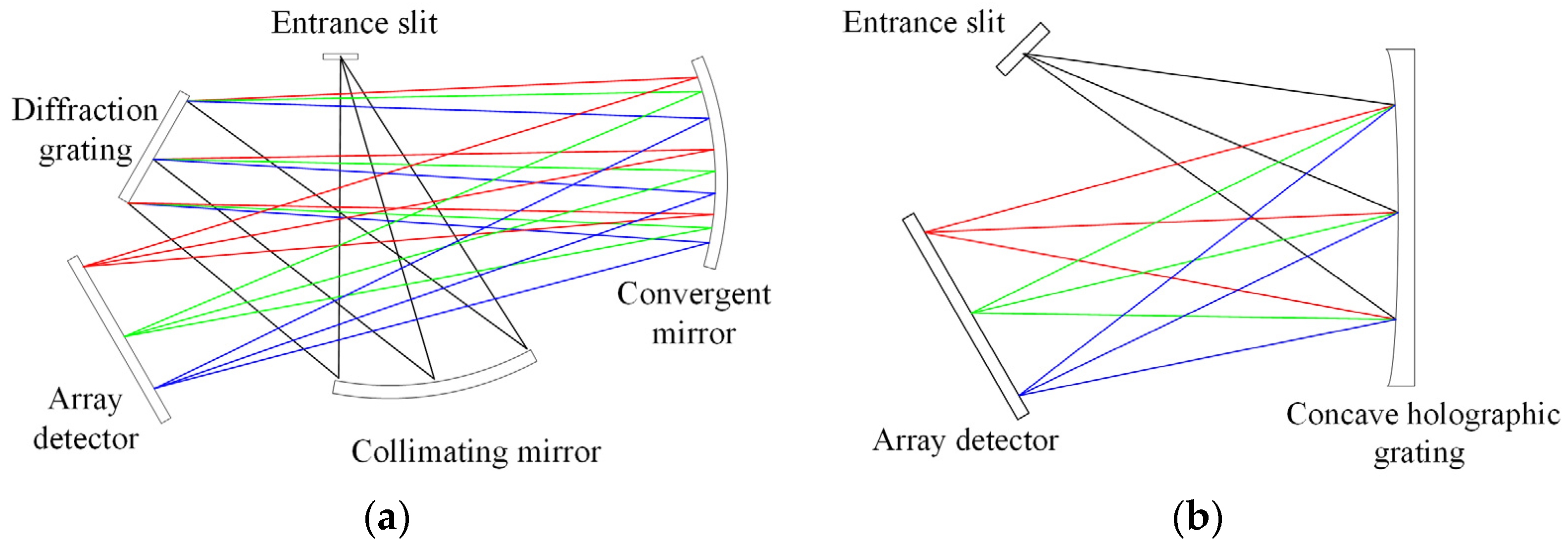
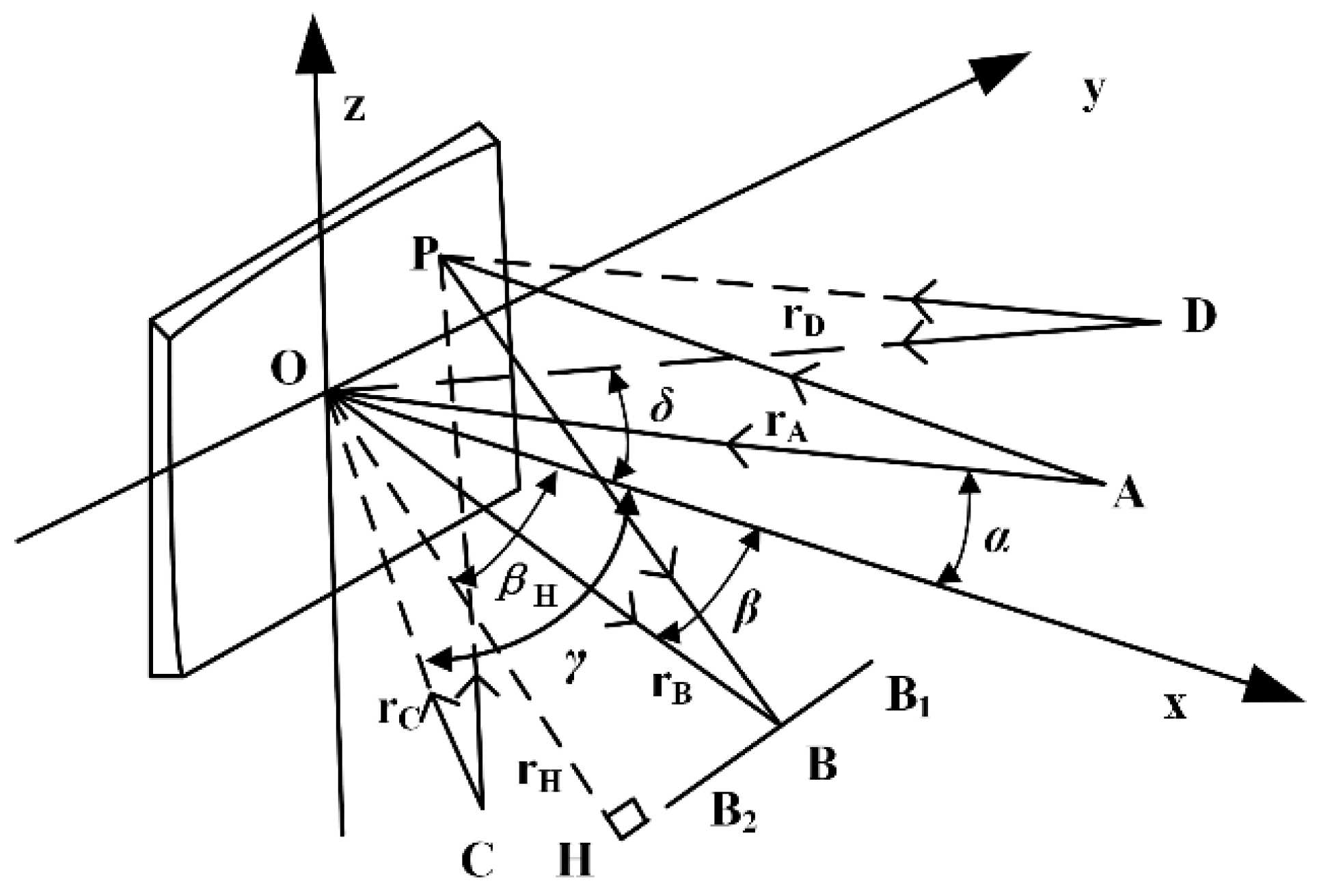
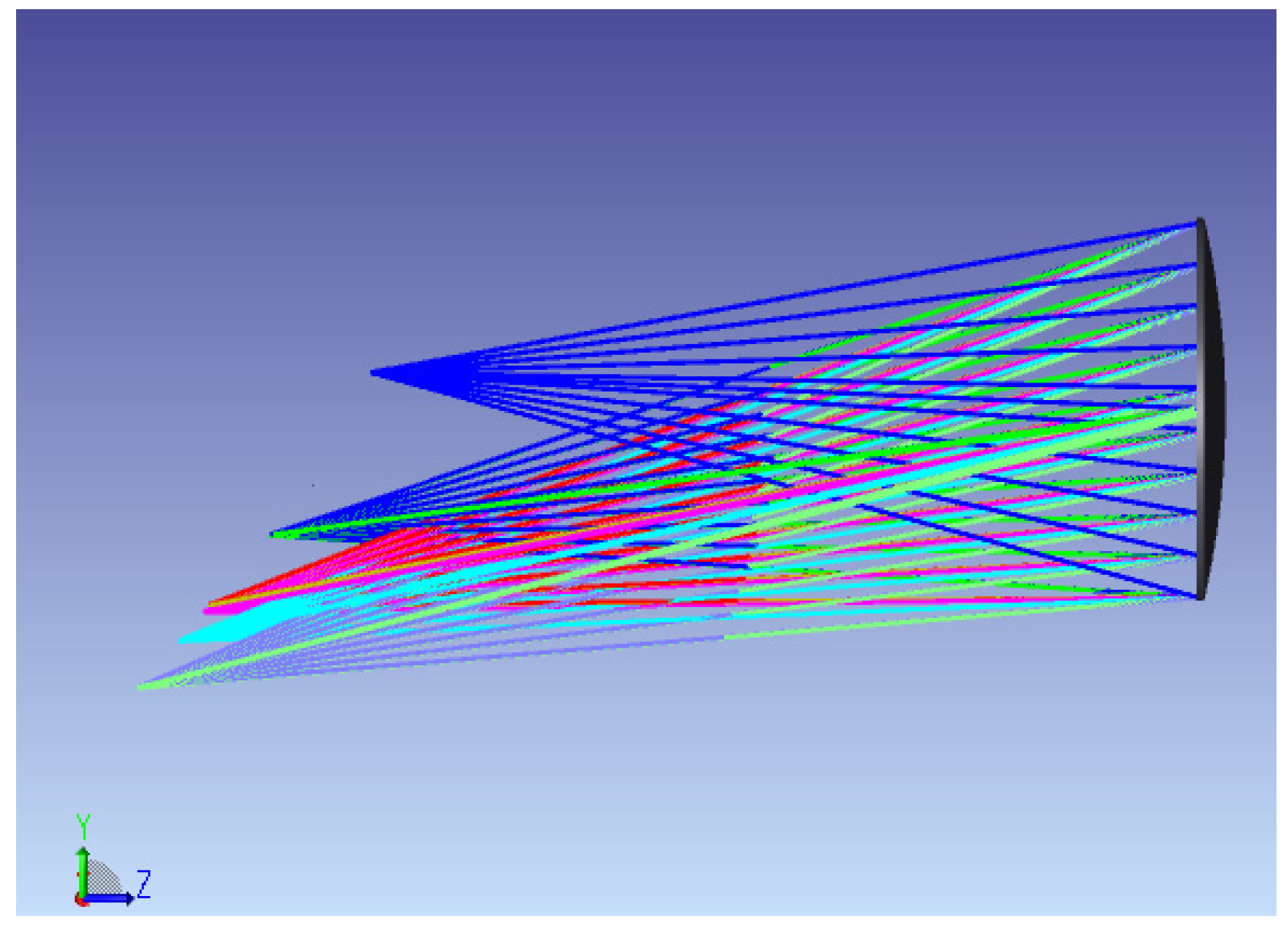
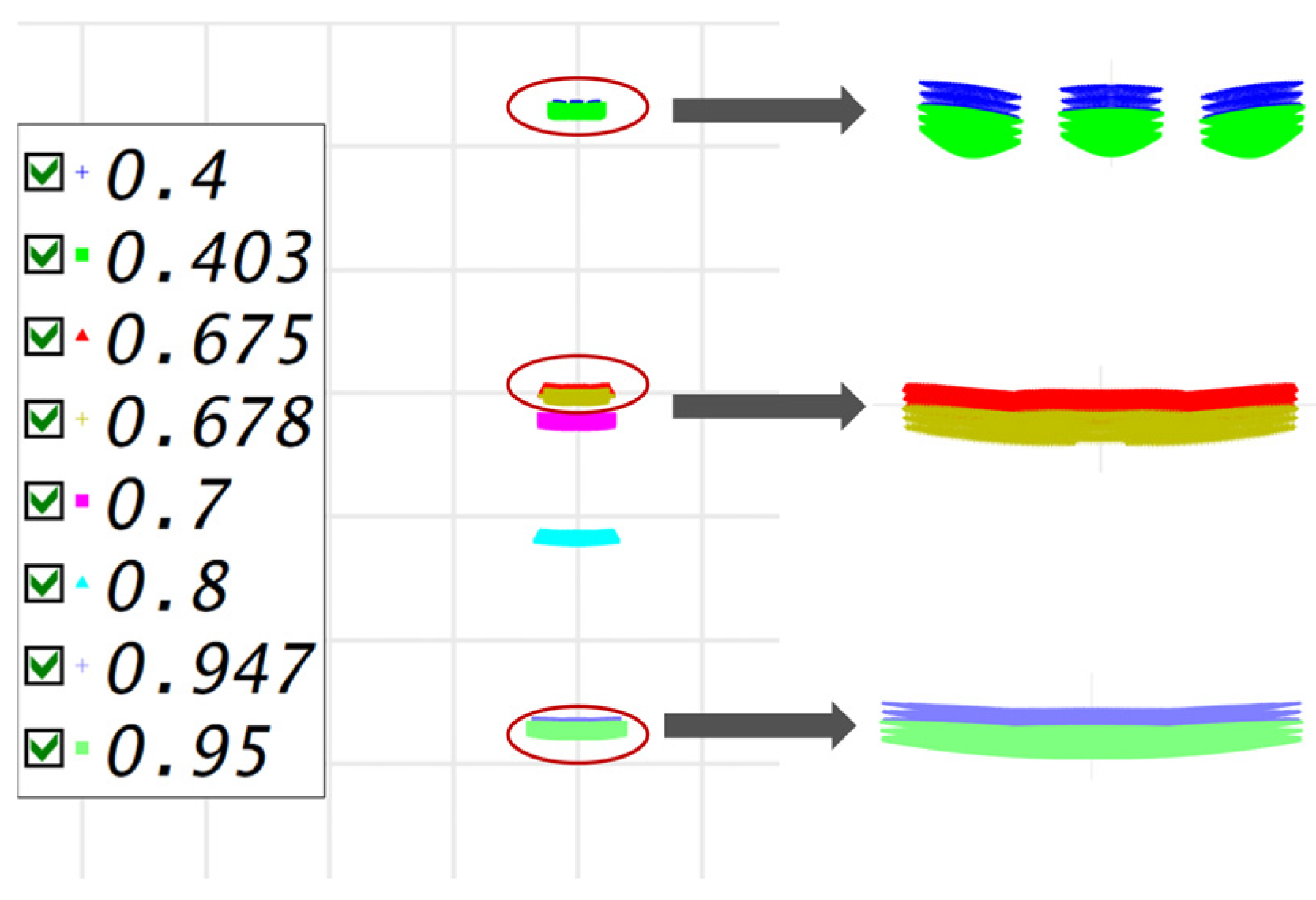
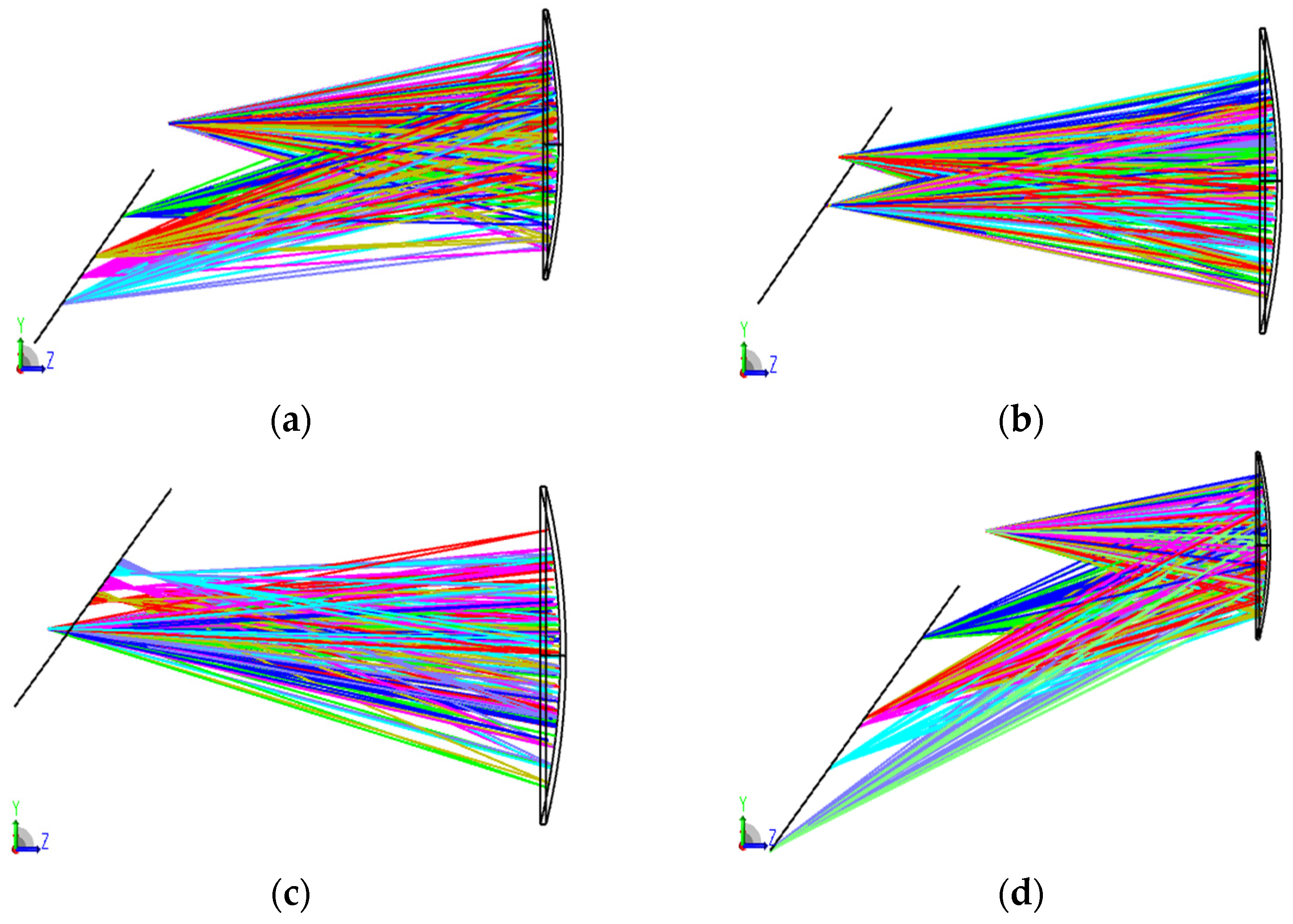
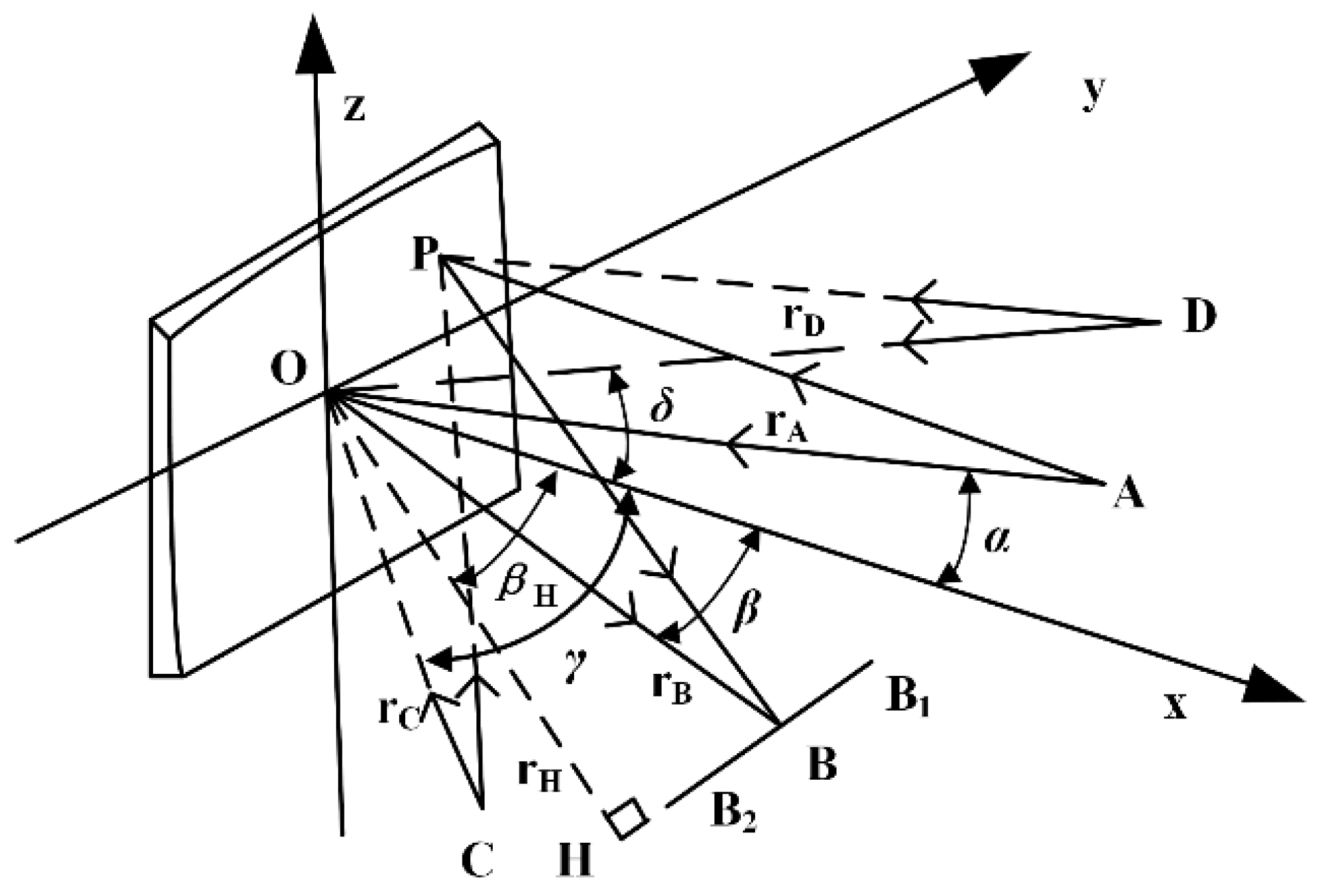
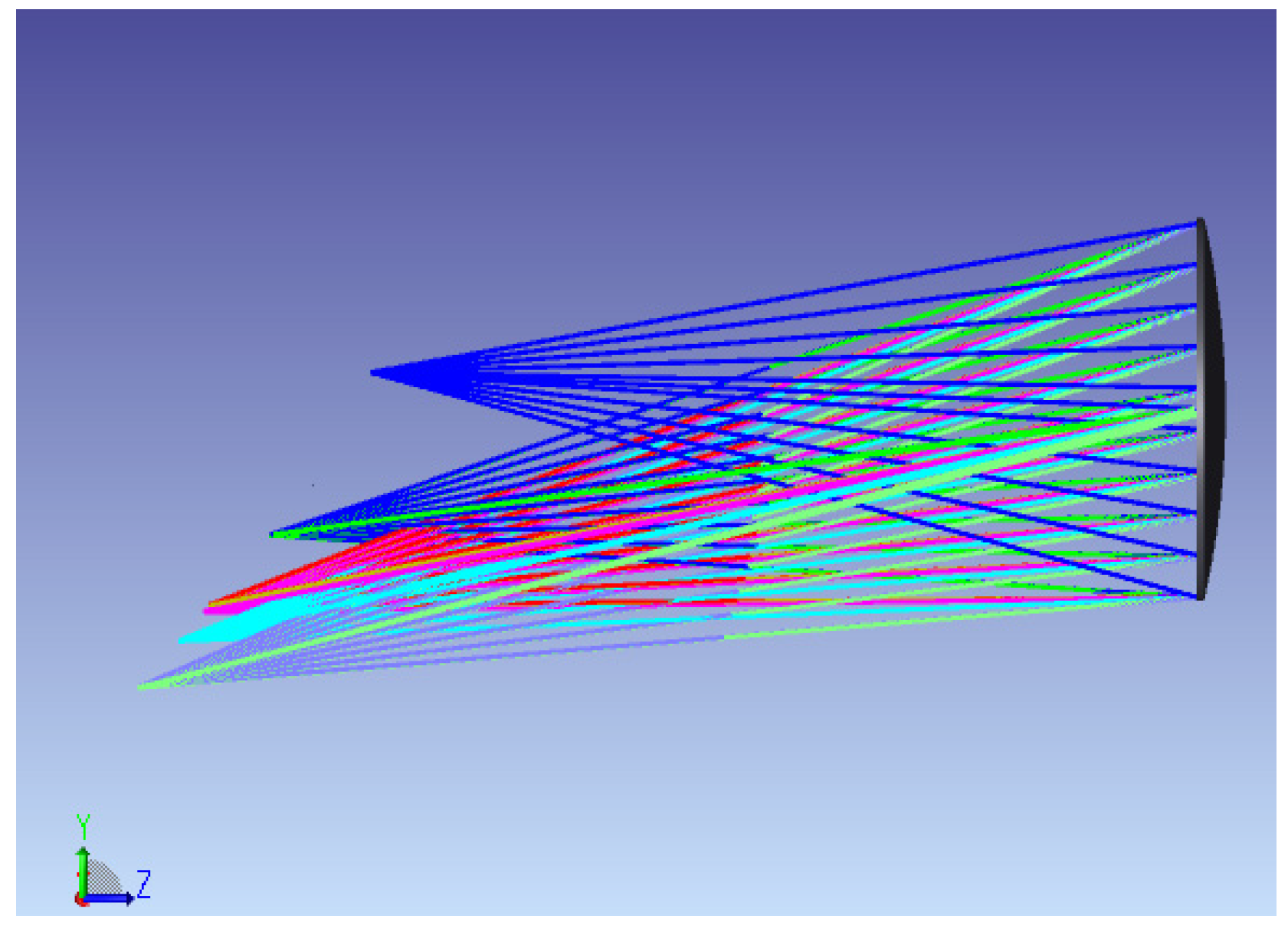
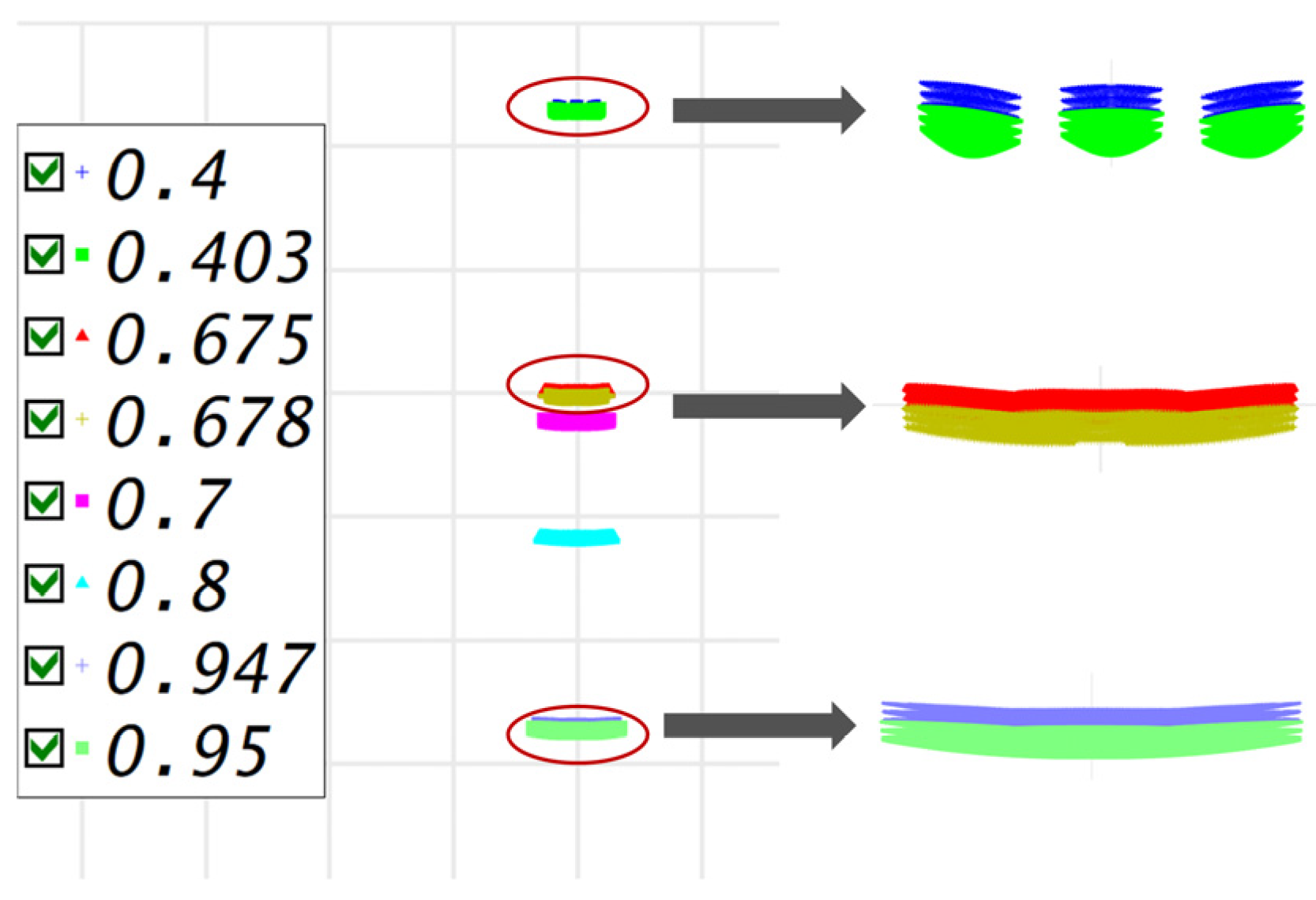
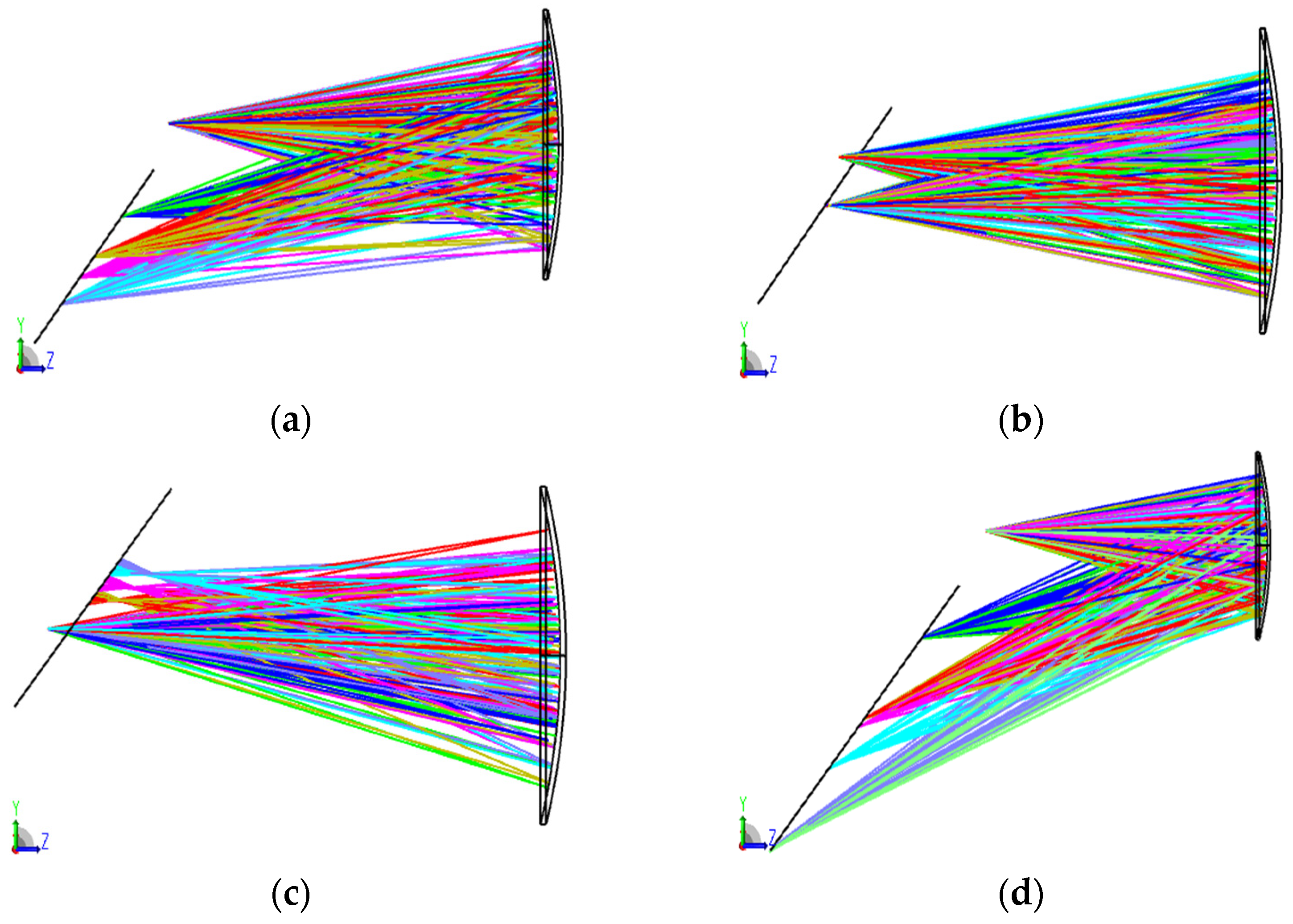
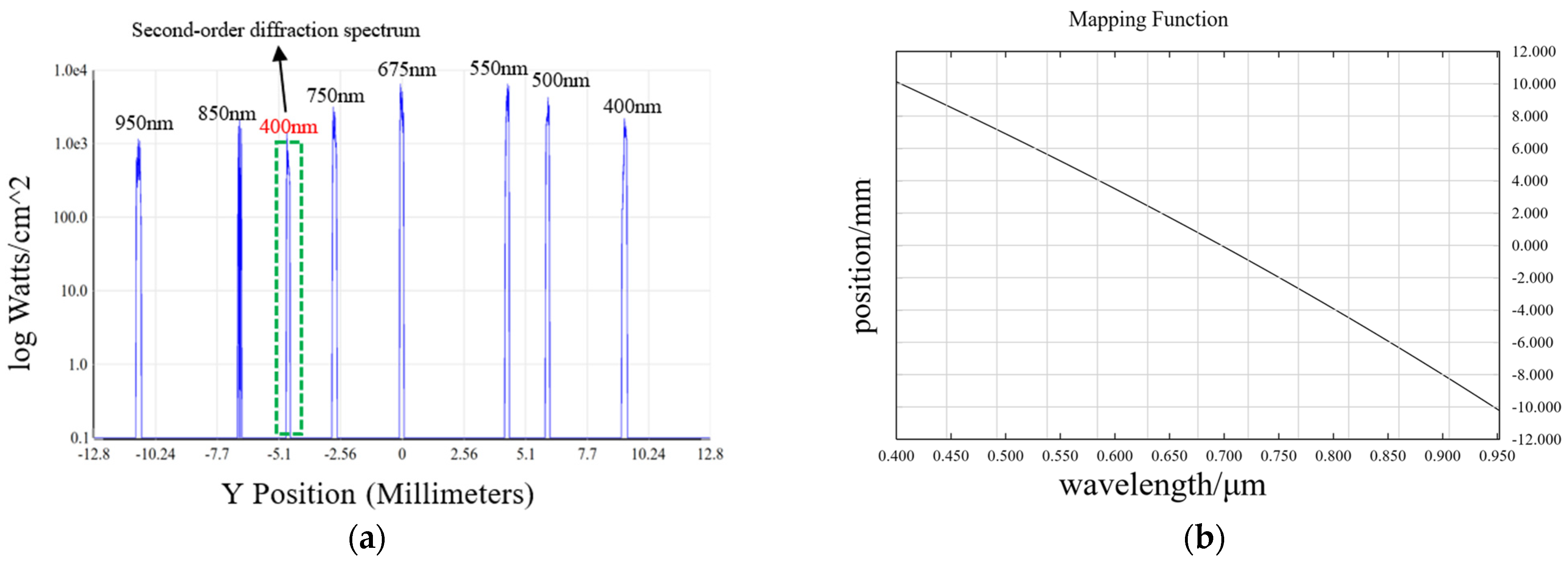
3.3. Spectrometer System Design
4. Stray Light Suppression and Simulation Analysis
4.1. Sources of Stray Light and Inhibition Assessment Methods
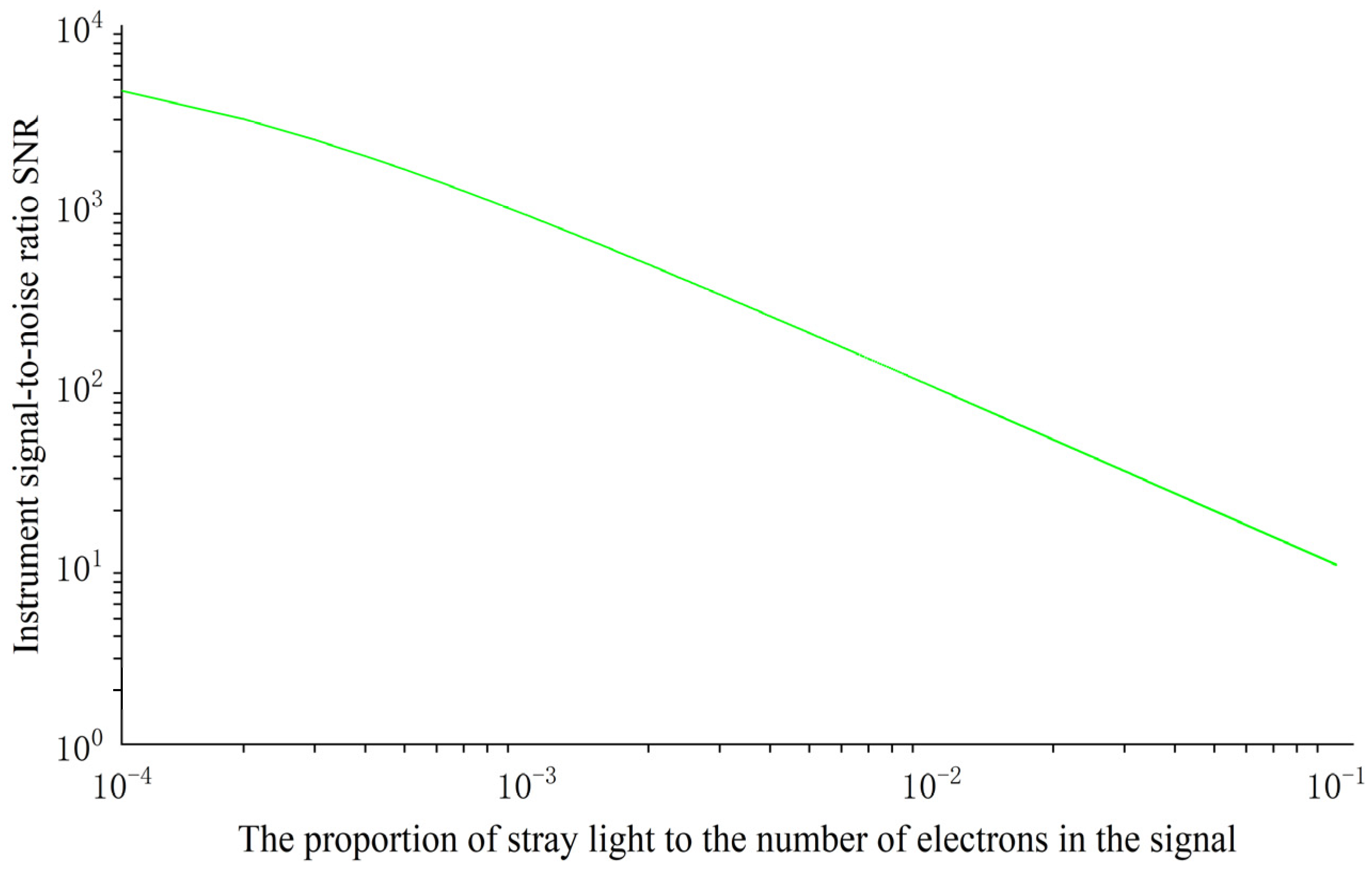
4.2. Analysis and Calculation of Stray Light Suppression Index
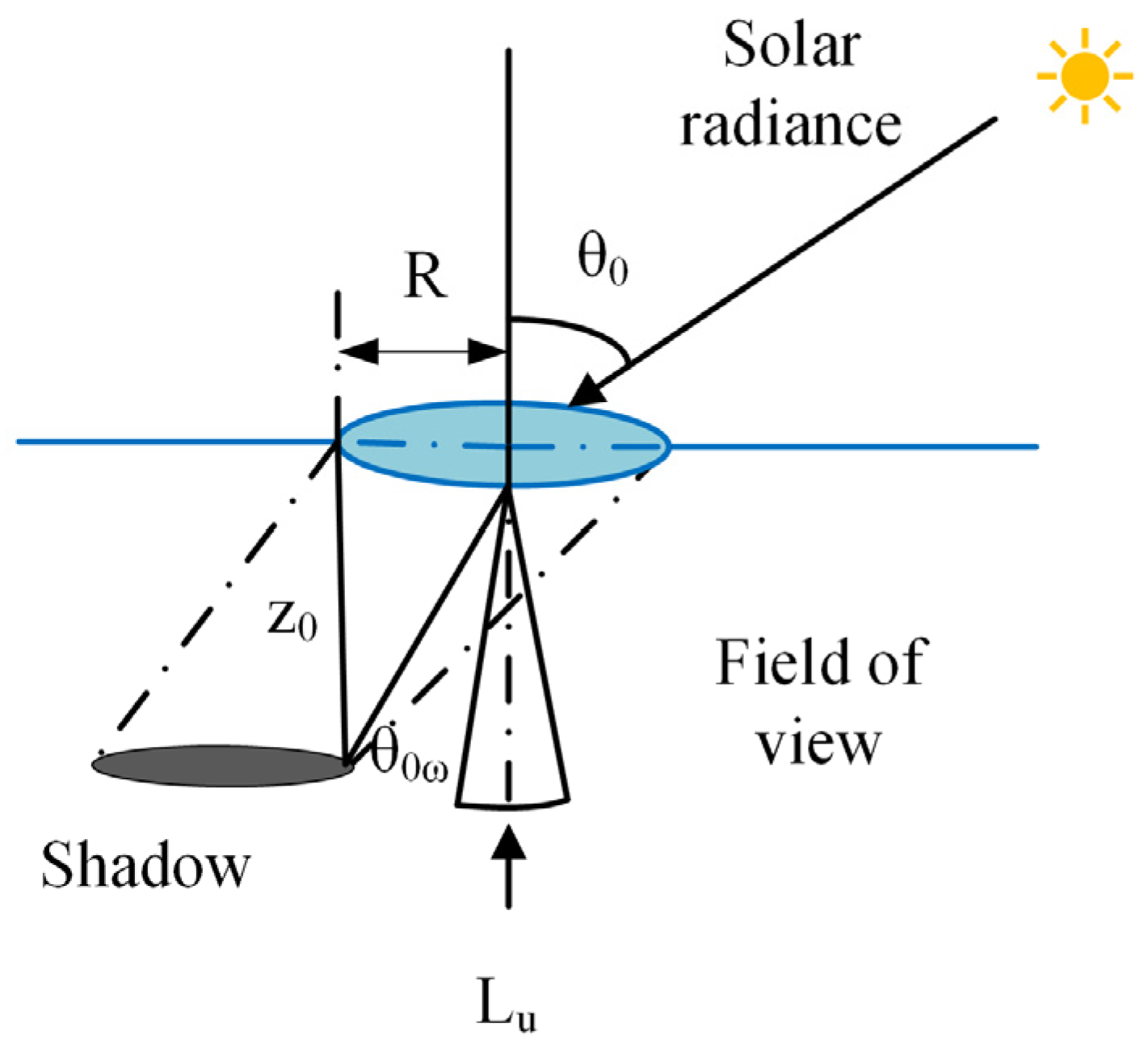
- The solar zenith angle is 0 degrees.
- Surface solar spectral irradiance
- Air-to-sea interface transmittance
- Diffuse attenuation coefficient in oceanic-type water
- The instrument’s position below the sea surface is z = 20 m
- Pixel area ; Quantum efficiency
- The transmittance of the optical system for irradiance measurement:
- Grating diffraction efficiency
- Detector dark current
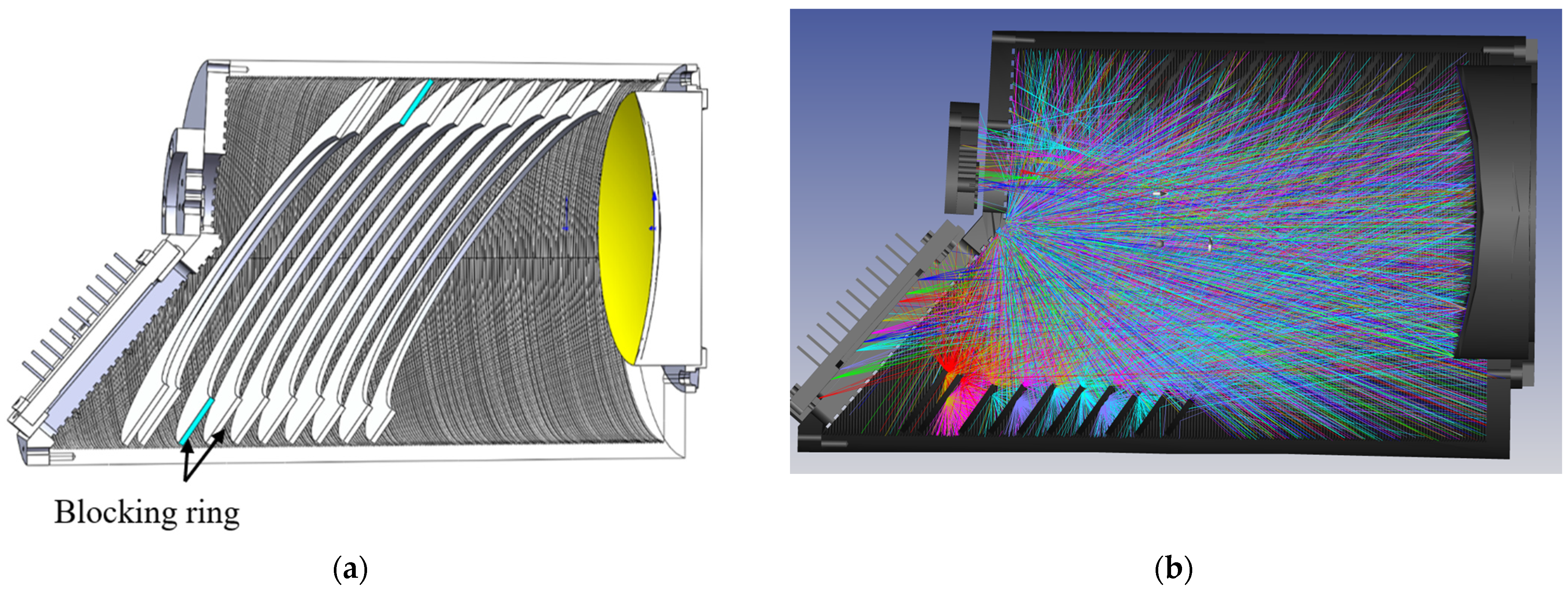
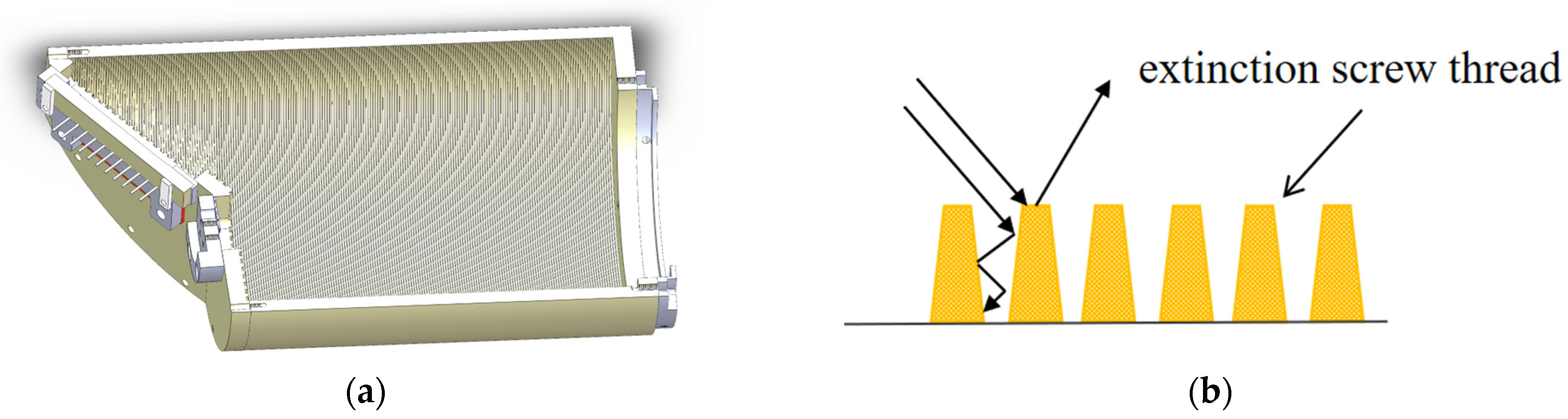
4.3. Stray Light Suppression Methods
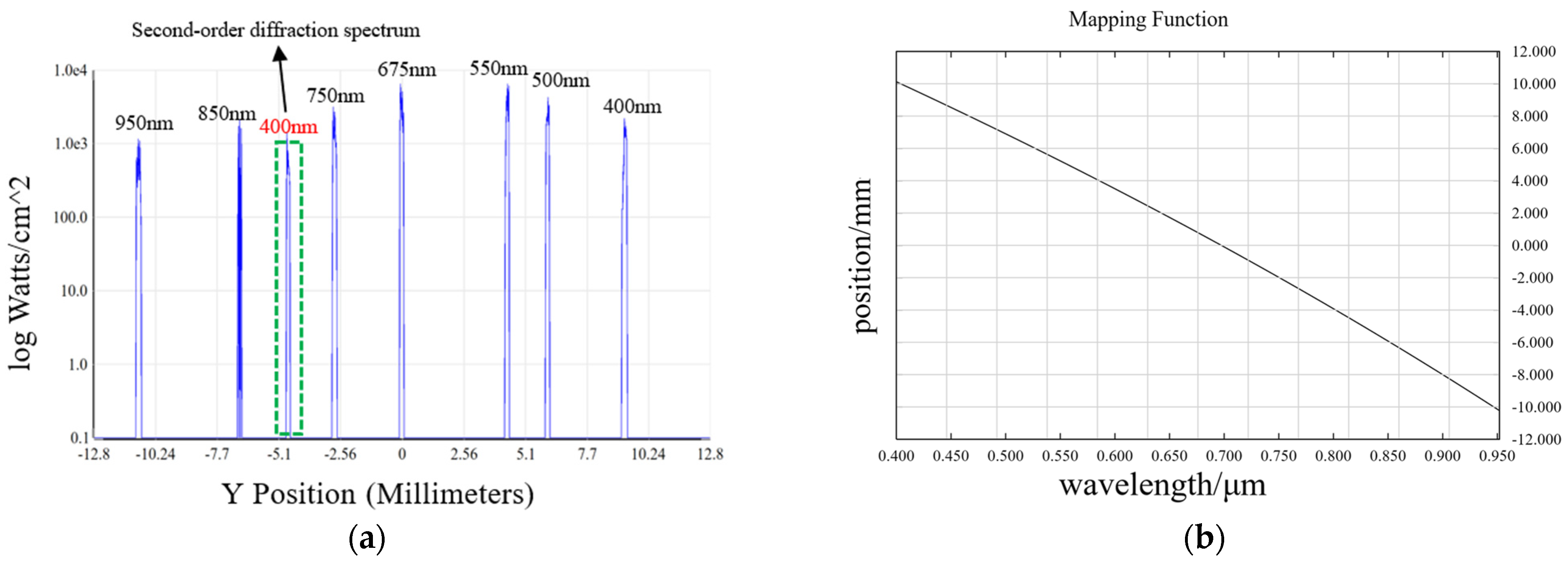
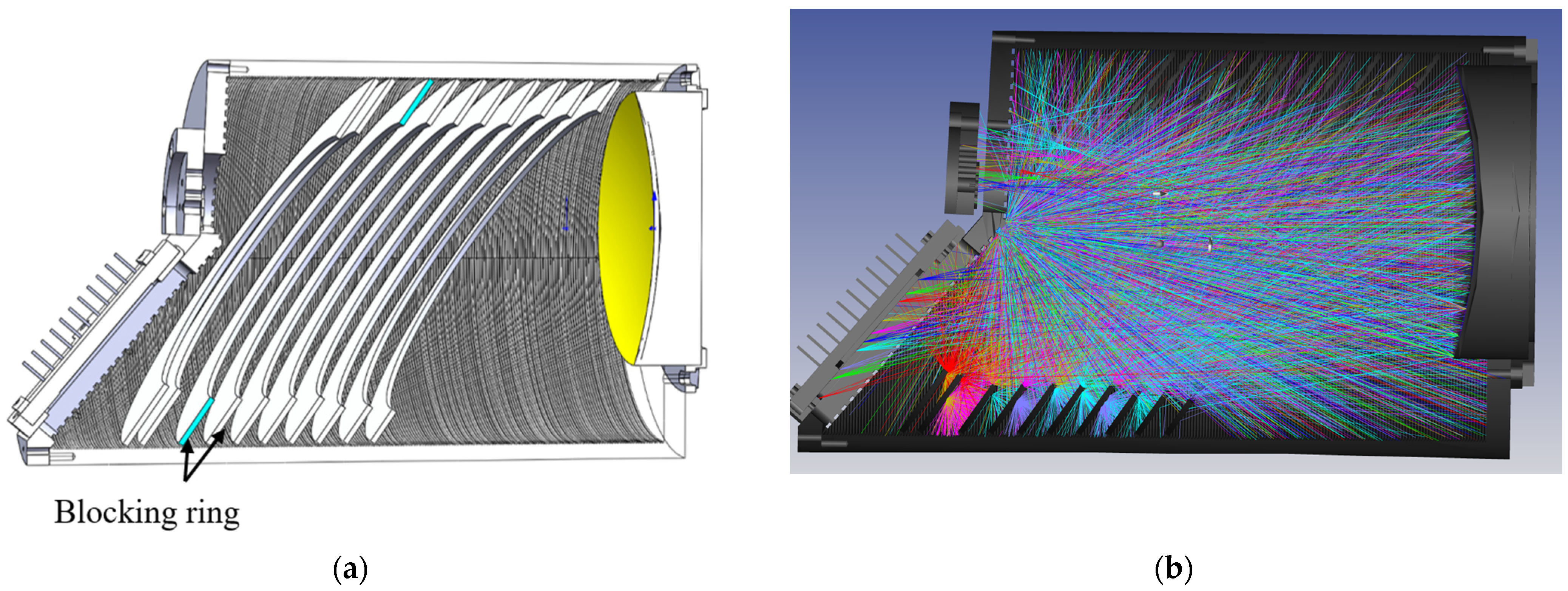
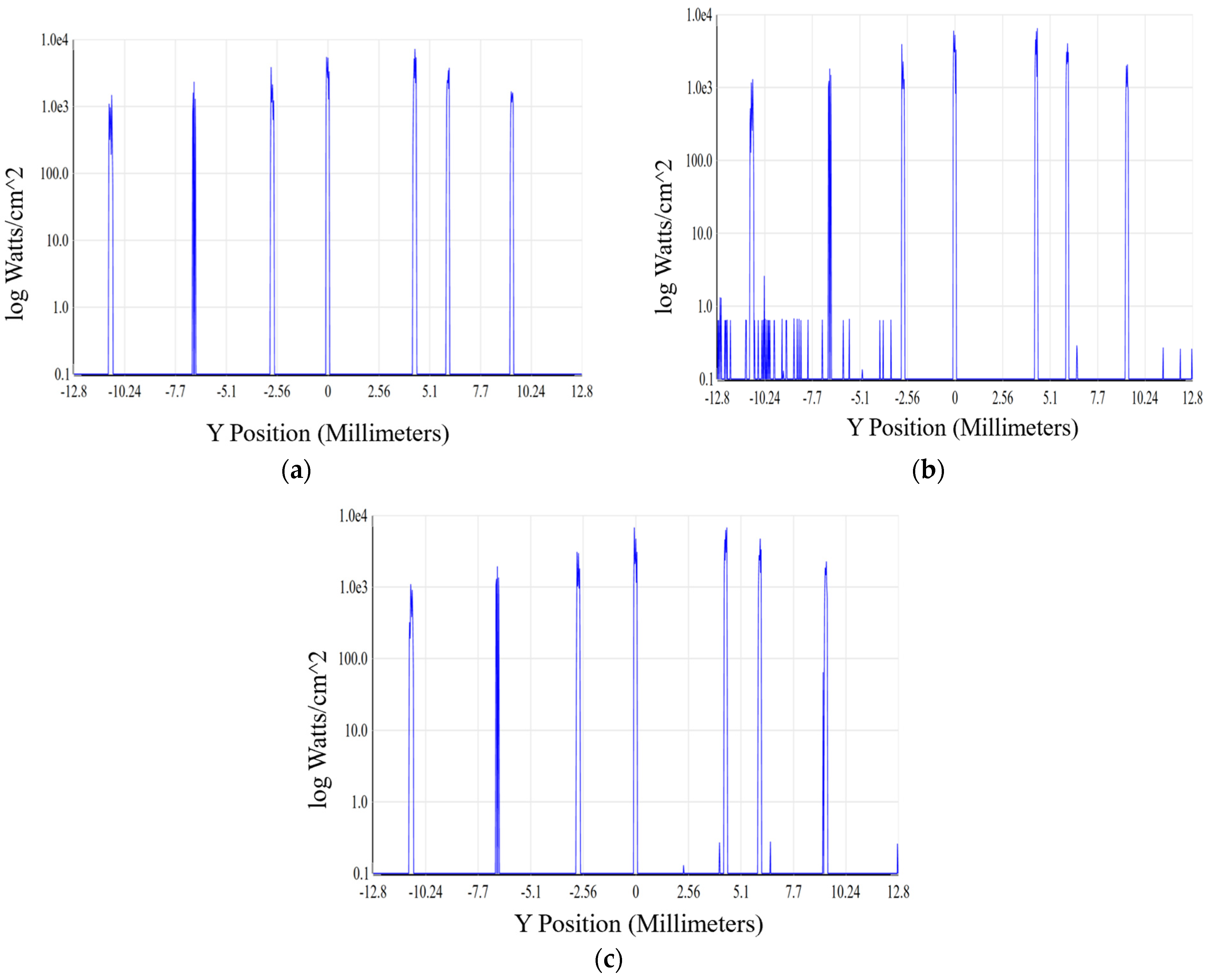
4.4. Simulation Results Analysis
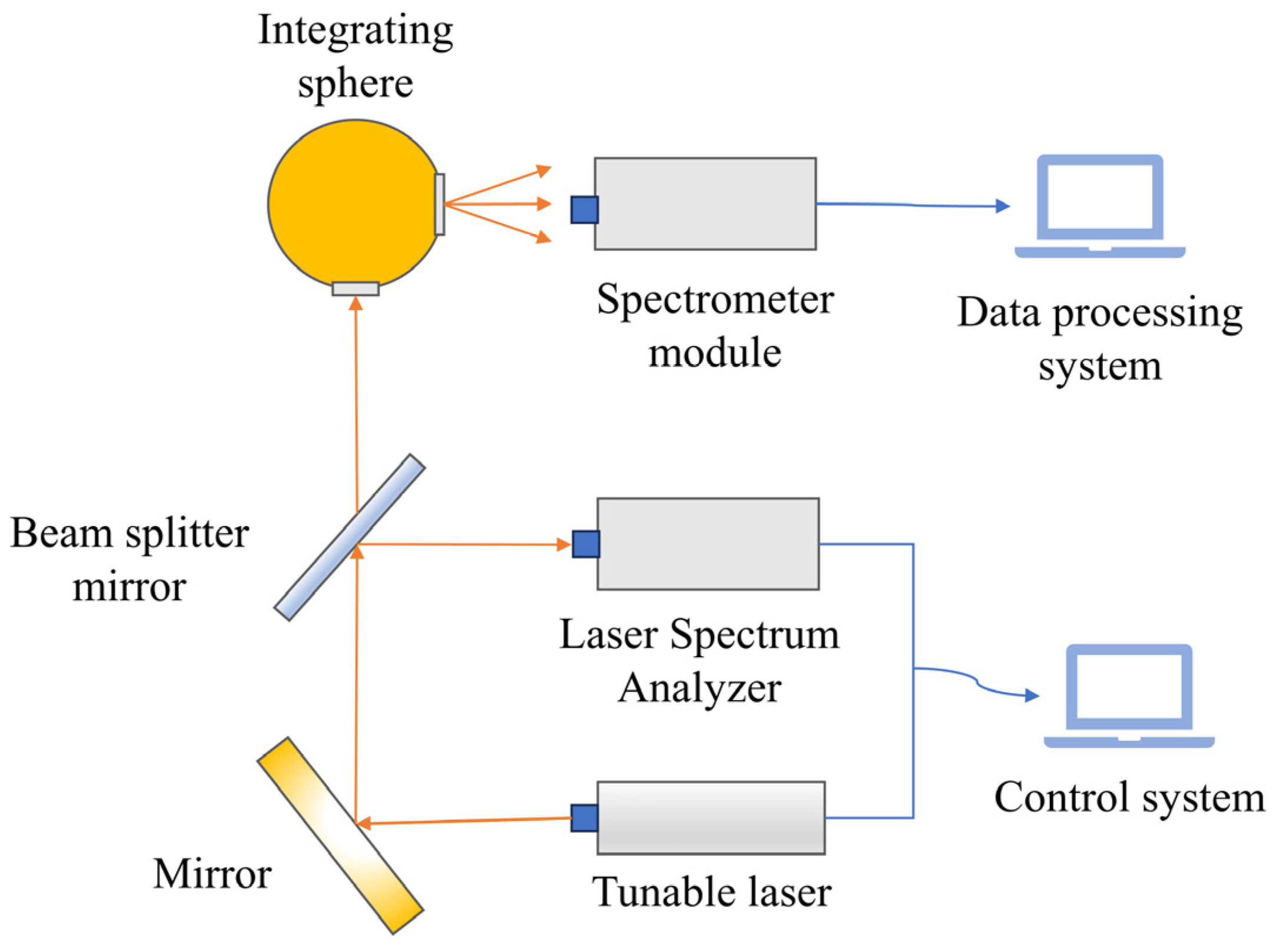
5. Experiment and Results
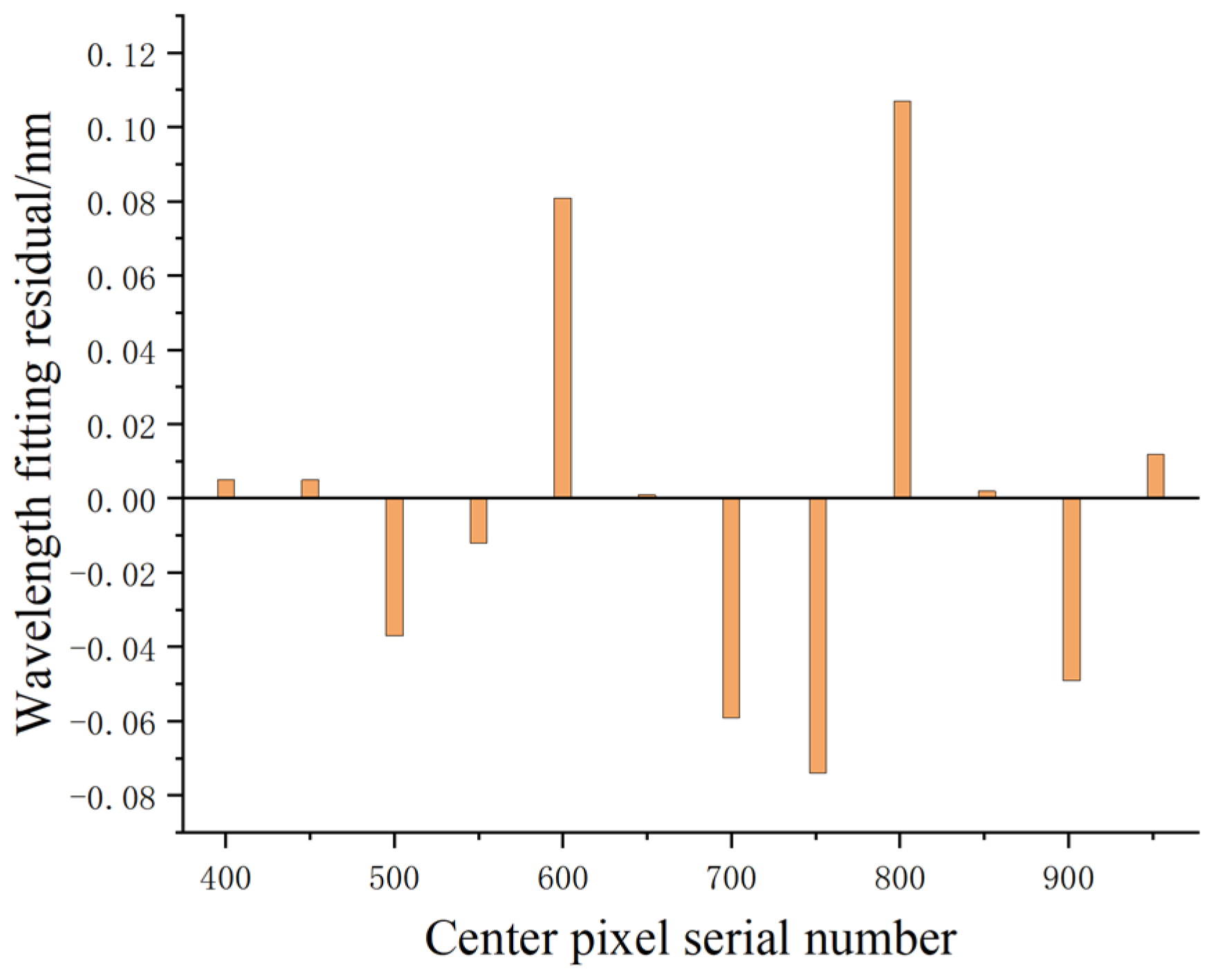
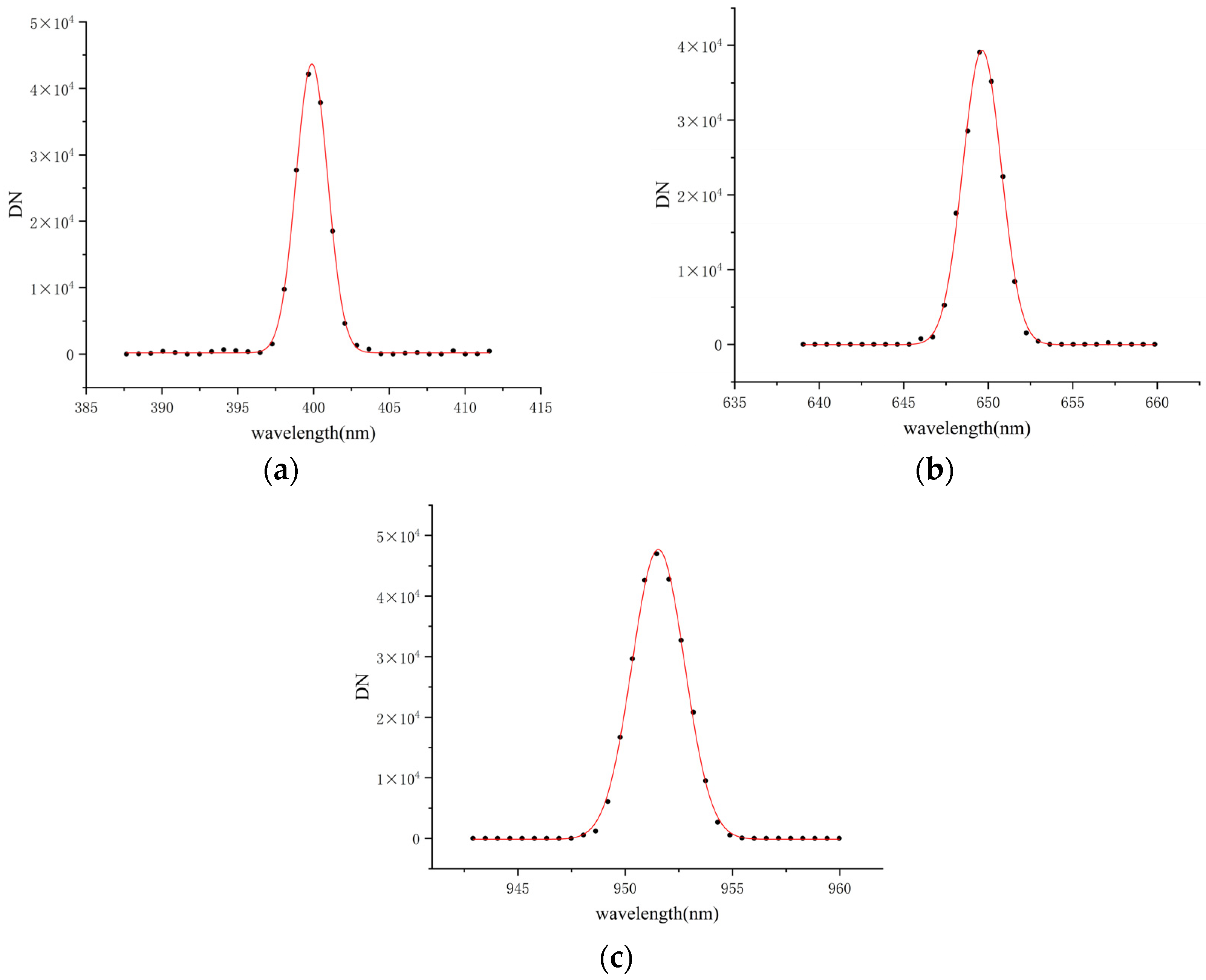
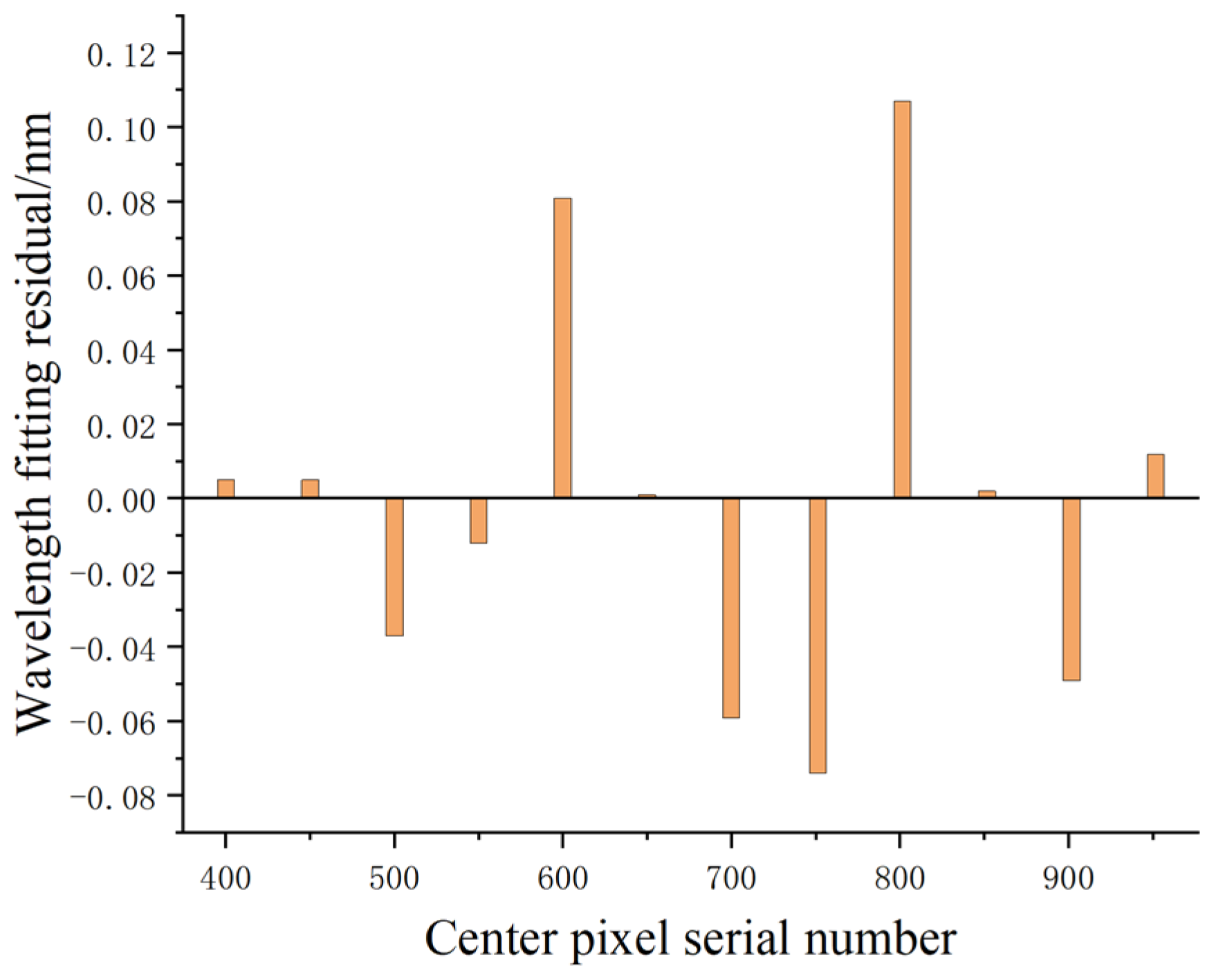
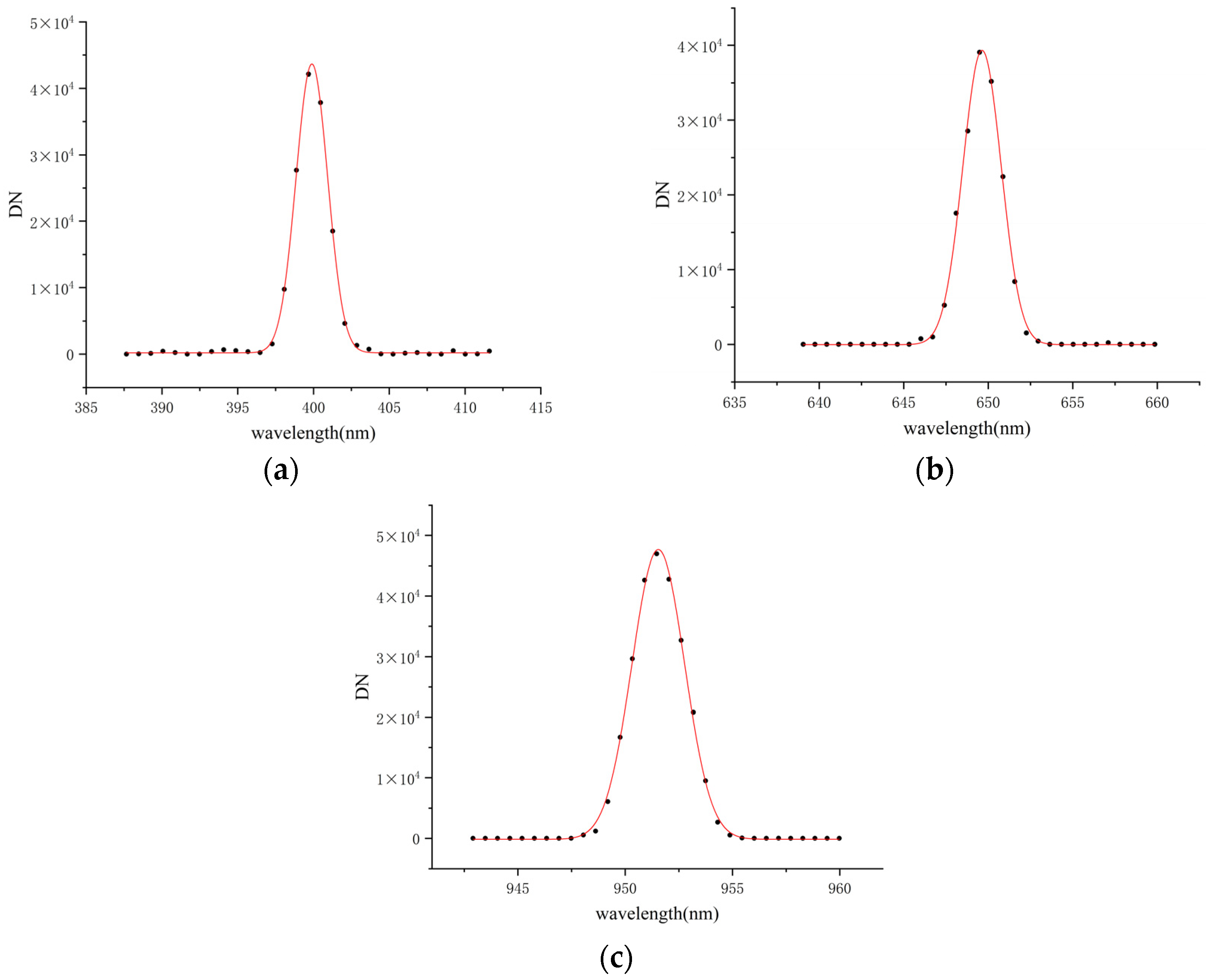
5.1. Wavelength Calibration
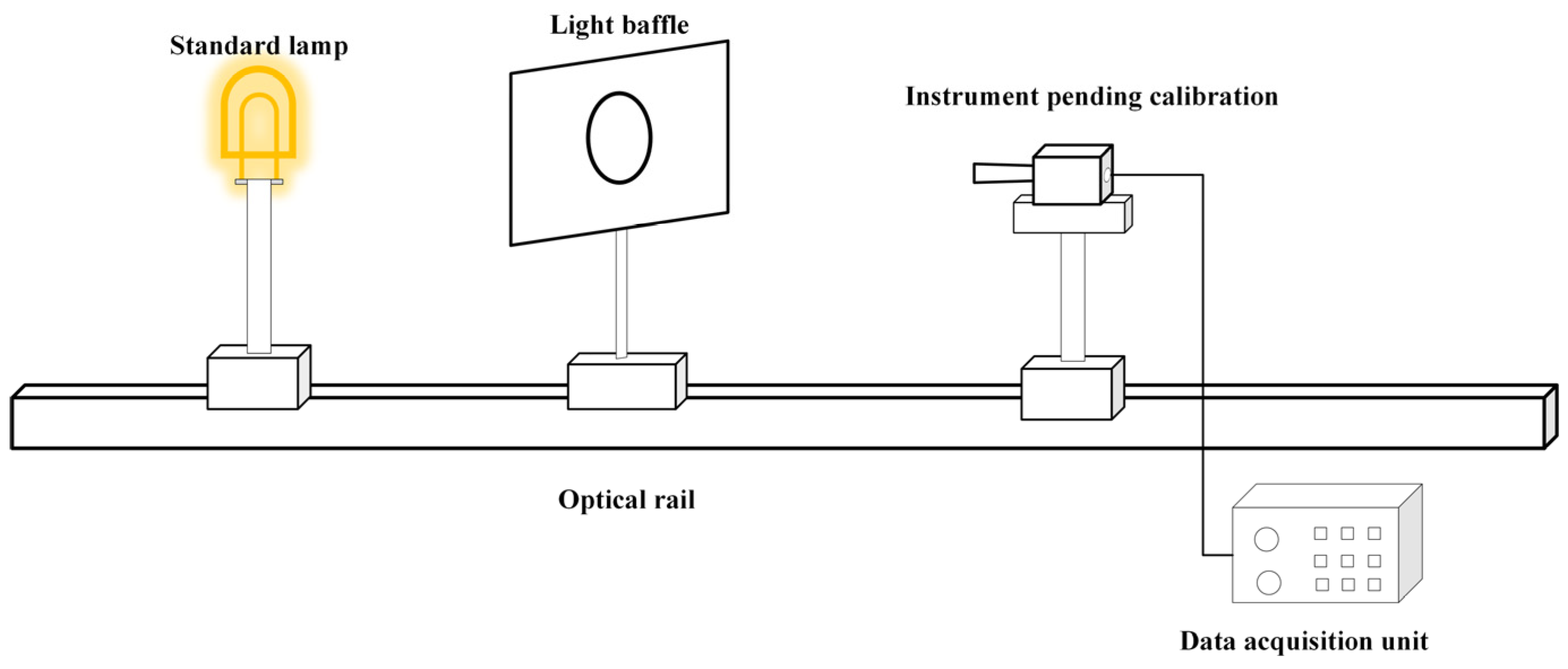
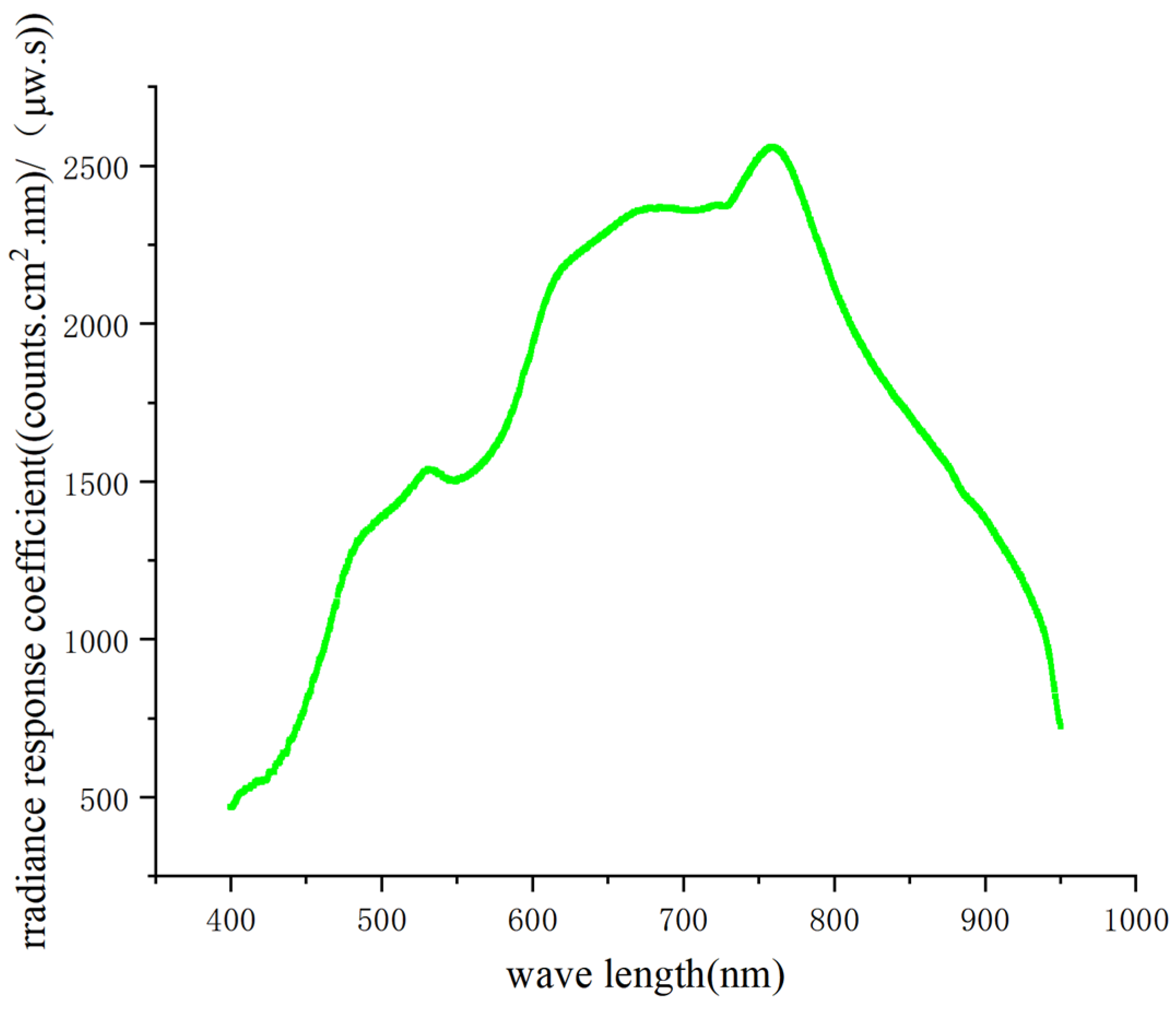
5.2. Radiometric Calibration
5.3. Uncertainty Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, C.; Yang, H.; Chen, Y.; Jin, X.; Chen, B.; Li, W.; Ren, Z.; Leng, S.; Ding, D. Modern Marine pasture construction and de-velopment—the academic review of the 230th Double Qing Forum. Sci. Found. China 2021, 35, 143–152. [Google Scholar] [CrossRef]
- Zhang, Y.; Qin, B.; Chen, W.; Gao, G.; Chen, Y. Experimental study on underwater light intensity and primary productivity caused by variation of total suspended matter. Adv. Water Sci. 2004, 15, 615–620. [Google Scholar] [CrossRef]
- Siegel, D.A.; Westberry, T.K.; O’Brien, M.C.; Nelson, N.B.; Michaels, A.F.; Morrison, J.R.; Scott, A.; Caporelli, E.A.; Sorensen, J.C.; Maritorena, S.; et al. Bio-Optical Modeling of Primary Production on Regional Scales: The Bermuda BioOptics Project. Deep Sea Res. Part II Top. Stud. Oceanogr. 2001, 48, 1865–1896. [Google Scholar] [CrossRef]
- Zhang, T.; Chen, S.; Xue, C. Research progress of optical properties measurement technology of Marine water body. Atmos-Pheric Environ. Opt. 2020, 15, 23–39. [Google Scholar] [CrossRef]
- Tian, L.; Li, S.; Sun, X.; Tong, R.; Song, Q.; Li, Y.; Sun, Z. Development of a Floating Water Spectral Measurement System Based on Sky Light Occlusion Method. Spectrosc. Spectr. Anal. 2020, 40, 2756. [Google Scholar] [CrossRef]
- Li, W.; Tian, L.; Guo, S.; Li, J.; Sun, Z.; Zhang, L. An Automatic Stationary Water Color Parameters Observation System for Shallow Waters: Designment and Applications. Sensors 2019, 19, 4360. [Google Scholar] [CrossRef] [PubMed]
- Braga, F.; Fabbretto, A.; Vanhellemont, Q.; Bresciani, M.; Giardino, C.; Scarpa, G.M.; Manfè, G.; Concha, J.A.; Brando, V.E. Assessment of PRISMA Water Reflectance Using Autonomous Hyperspectral Radiometry. ISPRS J. Photogramm. Remote Sens. 2022, 192, 99–114. [Google Scholar] [CrossRef]
- Zhang, X.; Li, C.; Zhou, W.; Liu, C.; Xu, Z.; Cao, W.; Yang, Y. Research on the Diffuse Attenuation Coefficient in the South China Sea Based on Volume Scattering Function and Absorption Coefficient. J. Trop. Oceanogr. 2023, 42, 86–95. [Google Scholar]
- Li, X. Water-related optics. Sci. Sin. Informationis 2024, 54, 227. [Google Scholar] [CrossRef]
- de Sa, E.S.; Desa, B.A.E. Design of an In-Water Spectrograph for Irradiance Measurements in the Ocean. Opt. Eng. 1991, 30, 1576–1582. [Google Scholar] [CrossRef]
- Cao, W.; Guo, Y.; Yang, Y.; Ke, T.; Jin, X.; Yu, B.; Zhong, Q. Multiband Underwater Spectral Radiometer. High-Tech. Commun. 2002, 12, 96–101. [Google Scholar] [CrossRef]
- Shang, Z.; Lee, Z.; Dong, Q.; Wei, J. Self-Shading Associated with a Skylight-Blocked Approach System for the Measurement of Water-Leaving Radiance and Its Correction. Appl. Opt. 2017, 56, 7033–7040. [Google Scholar] [CrossRef] [PubMed]
- Gordon, H.R.; Ding, K. Self-Shading of in-Water Optical Instruments. Limnol. Oceanogr. 1992, 37, 491–500. [Google Scholar] [CrossRef]
- Wu, T.; Cao, W. Research on the Shadow Effect and Its Correction Method in Underwater Radiance Measurements. Acta Oceanol. Sin. 2003, 25, 42–51. [Google Scholar]
- Li, C.; Ke, T.; Cao, W.; Yang, Y.; Lu, G.; Guo, C.; Deng, C. Design of an anchor chain-type underwater multispectral radiometer. Opt. Tech. 2004, 30, 665–668. [Google Scholar] [CrossRef]
- Wang, X.; Li, Z. Design and Performance Test of Gershun Tube Spectral Radiometer. Acta Opt. Sin. 2017, 37, 0612002. [Google Scholar] [CrossRef]
- Ramkilowan, A.; Chetty, N.; Lysko, M.; Griffith, D. Optical Detectors for Integration into a Low Cost Radiometric Device for In-Water Applications: A Feasibility Study. J. Indian Soc. Remote Sens. 2013, 41, 531–538. [Google Scholar] [CrossRef]
- Wu, J.; Zhao, L.; Chen, Y.; Zhou, C.; Wang, T.; Wang, Y. Design of Wide-Spectrum High-Resolution Flat-Field Concave Holo-graphic Grating Spectrometer. Acta Opt. Sin. 2012, 32, 83–87. [Google Scholar]
- Kong, P.; Tang, Y.; Bayin Heg Li, W.; Cui, J. Optimal design of zero-astigmatism wide-band flat field holographic concave grating. Spectrosc. Spectr. Anal. 2012, 32, 565–569. [Google Scholar] [CrossRef]
- Shu, Z.; Han, Z.; Wu, Y.; Lin, Z.; Zhang, H.; Wang, M. Stray light analysis and optimization design for optical system of space detection camera. Appl. Opt. 2023, 44, 982–991. [Google Scholar] [CrossRef]
- Wang, H.; Chen, Q.; Ma, Z.; Yan, H.; Lin, S.; Xue, Y. Development and Prospects of Stray Light Suppression and Evaluation Techniques (Invited). Acta Photonica Sin. 2022, 51, 56. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Spectral range/nm | 400–950 |
| Diffraction order | +1 |
| Spectral resolution/nm | ≤3 |
| Grating density | 217 L/mm |
| Slit width/μm | 50 |
| F-number | 2.27 |
| Spectrum length/mm | 20.2 |
| Mounting Parameters | Recording Parameter | ||
|---|---|---|---|
| /mm | 84.9 | /mm | 181.44 |
| /(°) | 2.5 | /(°) | 4.13 |
| /mm | 64 | /mm | 239.14 |
| /(°) | 40.51 | /(°) | 9.67 |
| R/mm | 85.787 | /μm | 4.6 |
| Numerical Order | Wavelength/nm | Central Pixel |
|---|---|---|
| 1 | 399.916 | 132.298 |
| 2 | 449.895 | 195.813 |
| 3 | 499.849 | 261.162 |
| 4 | 549.789 | 328.254 |
| 5 | 599.740 | 397.166 |
| 6 | 649.612 | 468.180 |
| 7 | 699.526 | 541.292 |
| 8 | 751.034 | 618.966 |
| 9 | 801.193 | 696.694 |
| 10 | 851.443 | 777.586 |
| 11 | 901.524 | 860.939 |
| 12 | 951.564 | 947.142 |
| WAVE/nm | FWHM/nm |
|---|---|
| 399.902 | 2.458 |
| 449.918 | 2.688 |
| 499.862 | 2.891 |
| 549.795 | 2.805 |
| 599.634 | 2.823 |
| 649.584 | 2.670 |
| 699.513 | 2.432 |
| 751.032 | 2.362 |
| 801.181 | 2.217 |
| 851.428 | 2.272 |
| 901.501 | 2.422 |
| 951.597 | 2.869 |
| Uncertainty Sources | Uncertainty |
|---|---|
| Standard light spectrum irradiance | 1% |
| Stabilized current supply | 0.1% |
| Calibration distance and angle | 0.4% |
| Spatial stray light | 0.2% |
| System noise | 0.3~0.9% |
| Combined uncertainty | 1.14~1.42% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Wang, K.; Yue, W.; Liu, S.; Yu, J.; Ye, X. Optical Design and Stray Light Analysis of Underwater Spectral Radiometer. Appl. Sci. 2024, 14, 3172. https://doi.org/10.3390/app14083172
Zhang Y, Wang K, Yue W, Liu S, Yu J, Ye X. Optical Design and Stray Light Analysis of Underwater Spectral Radiometer. Applied Sciences. 2024; 14(8):3172. https://doi.org/10.3390/app14083172
Chicago/Turabian StyleZhang, Yisu, Kai Wang, Wei Yue, Shuangkui Liu, Jieling Yu, and Xin Ye. 2024. "Optical Design and Stray Light Analysis of Underwater Spectral Radiometer" Applied Sciences 14, no. 8: 3172. https://doi.org/10.3390/app14083172