

Research on the Dynamic Characteristics of a Dual Linear-Motor Differential-Drive Micro-Feed Servo System


Abstract
Featured Application
Abstract
1. Introduction
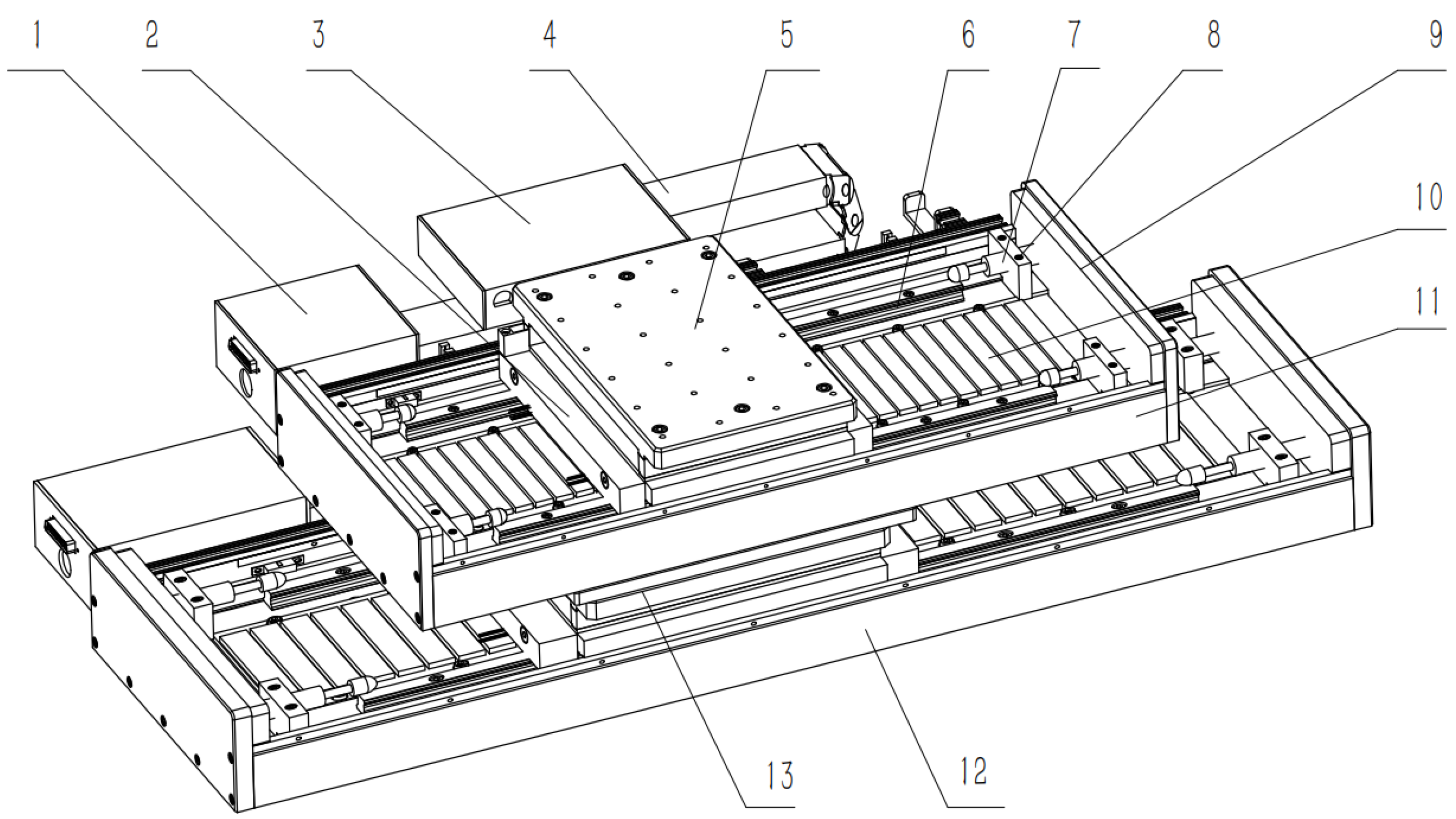
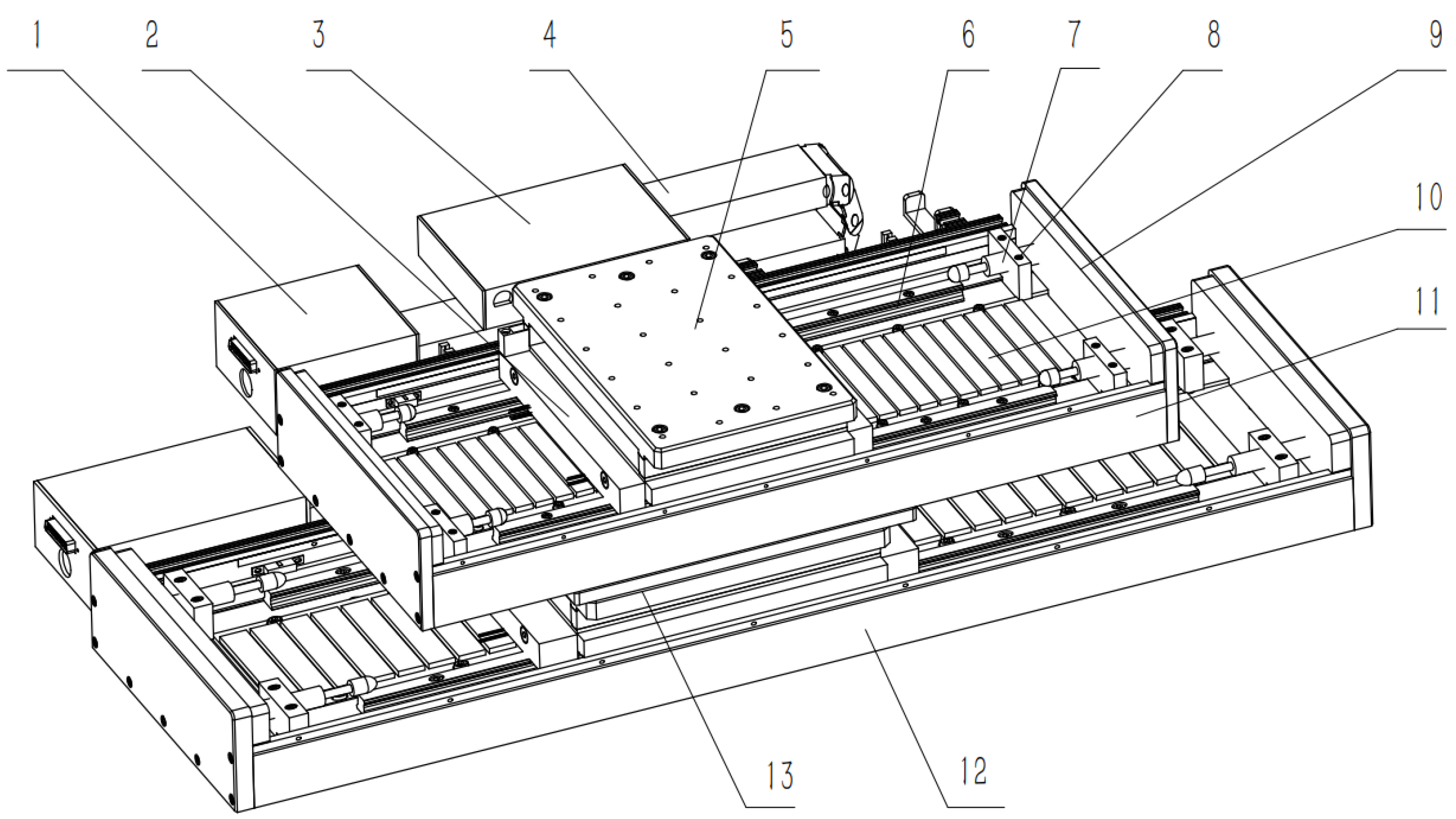
2. Configuration of the Dual Linear-Motor Differential-Drive System
3. Dynamic Model of the Dual Linear-Motor Differential-Drive System
3.1. Mechanical Model
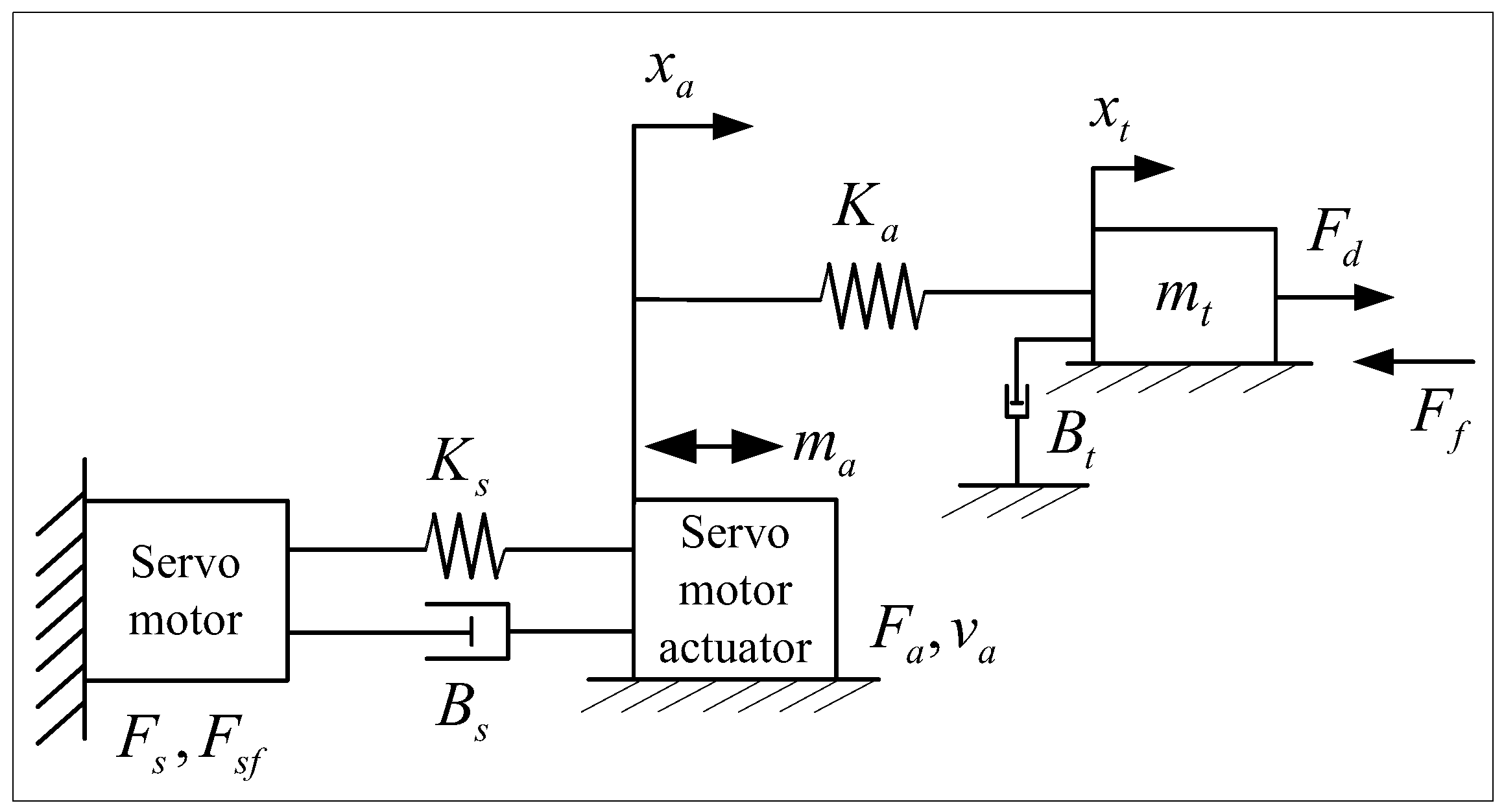
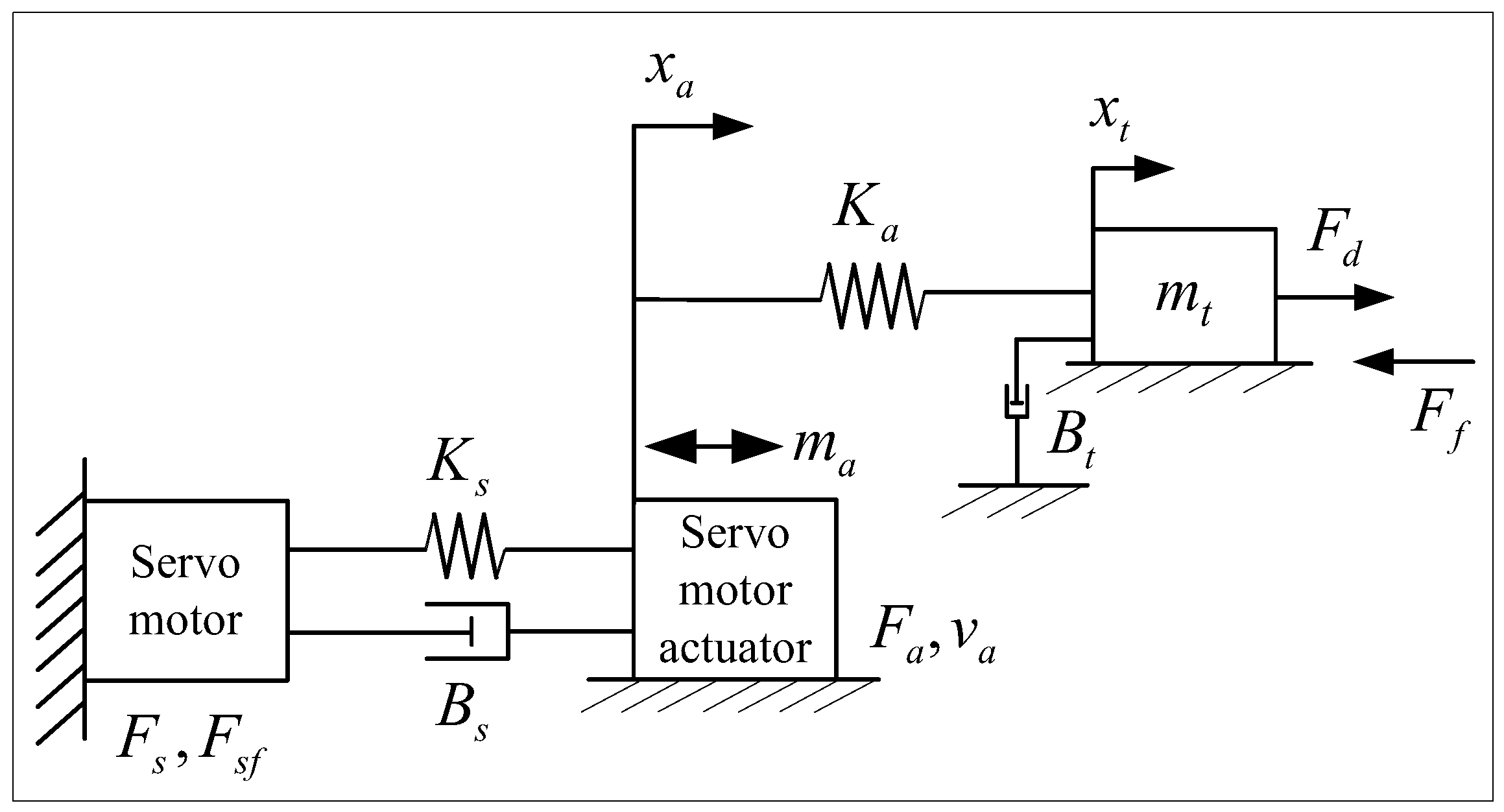
3.1.1. Linear-Motor Single-Drive System Analysis
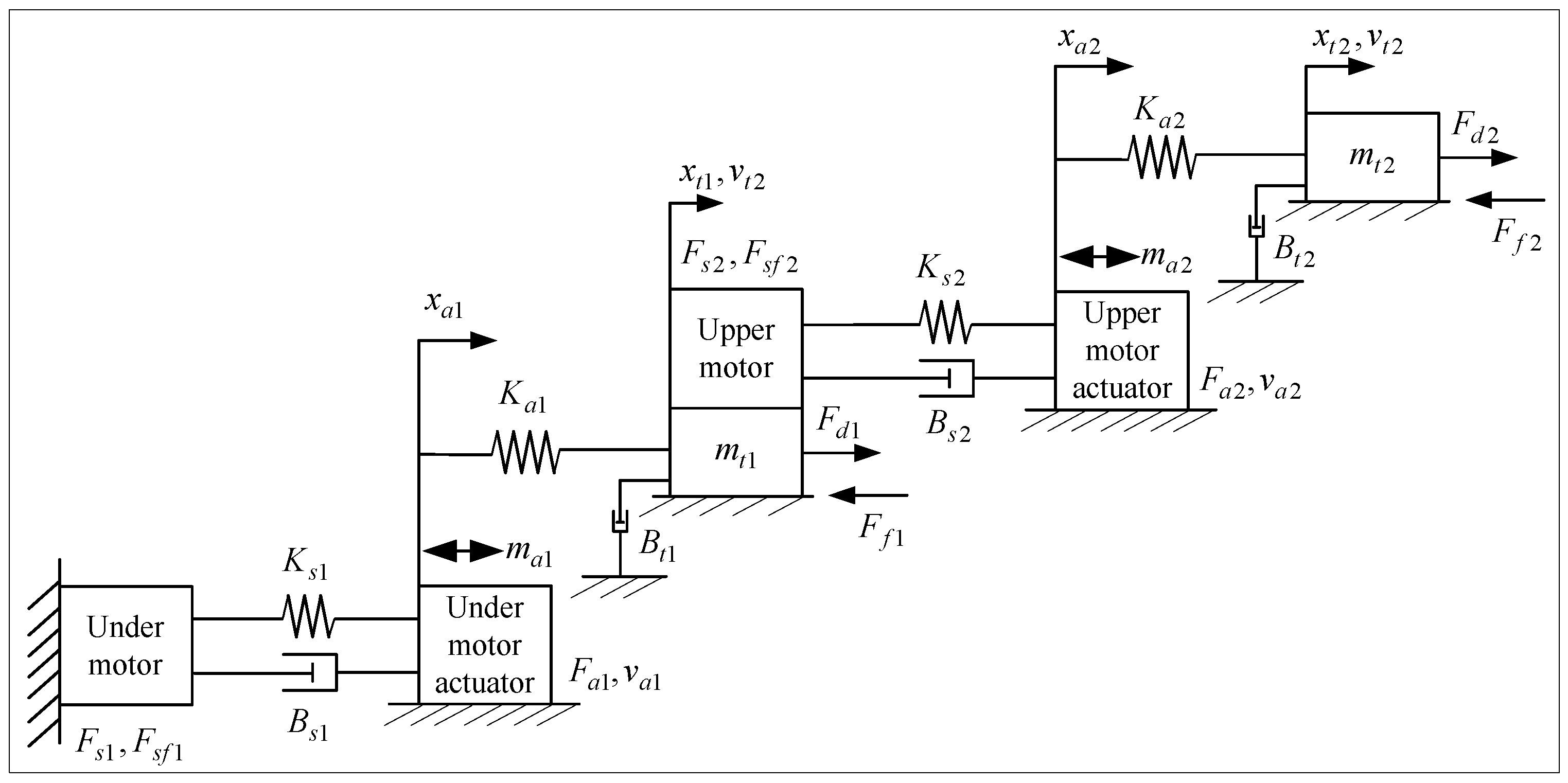
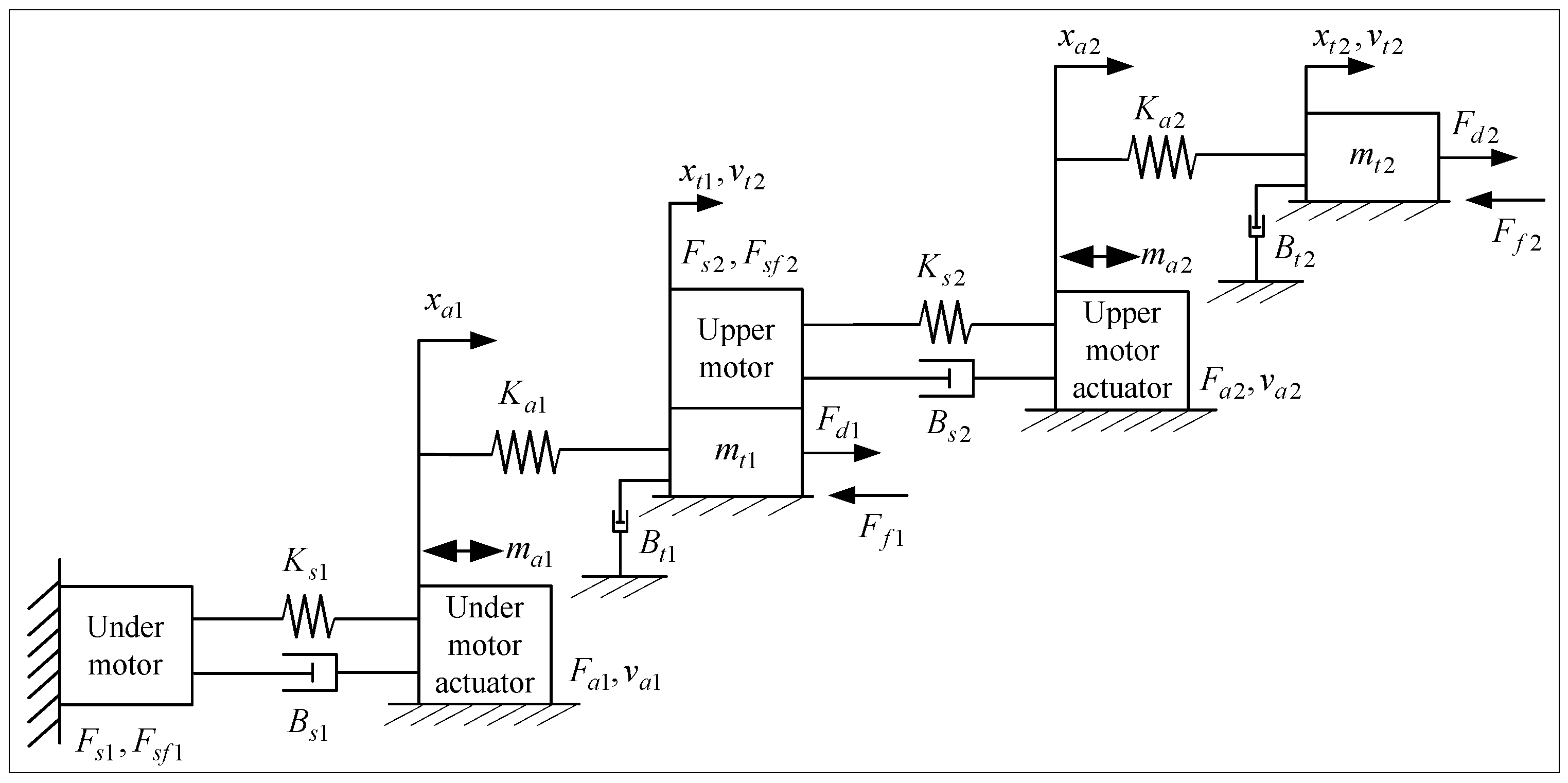
3.1.2. Dual Linear-Motor Differential-Drive System Analysis
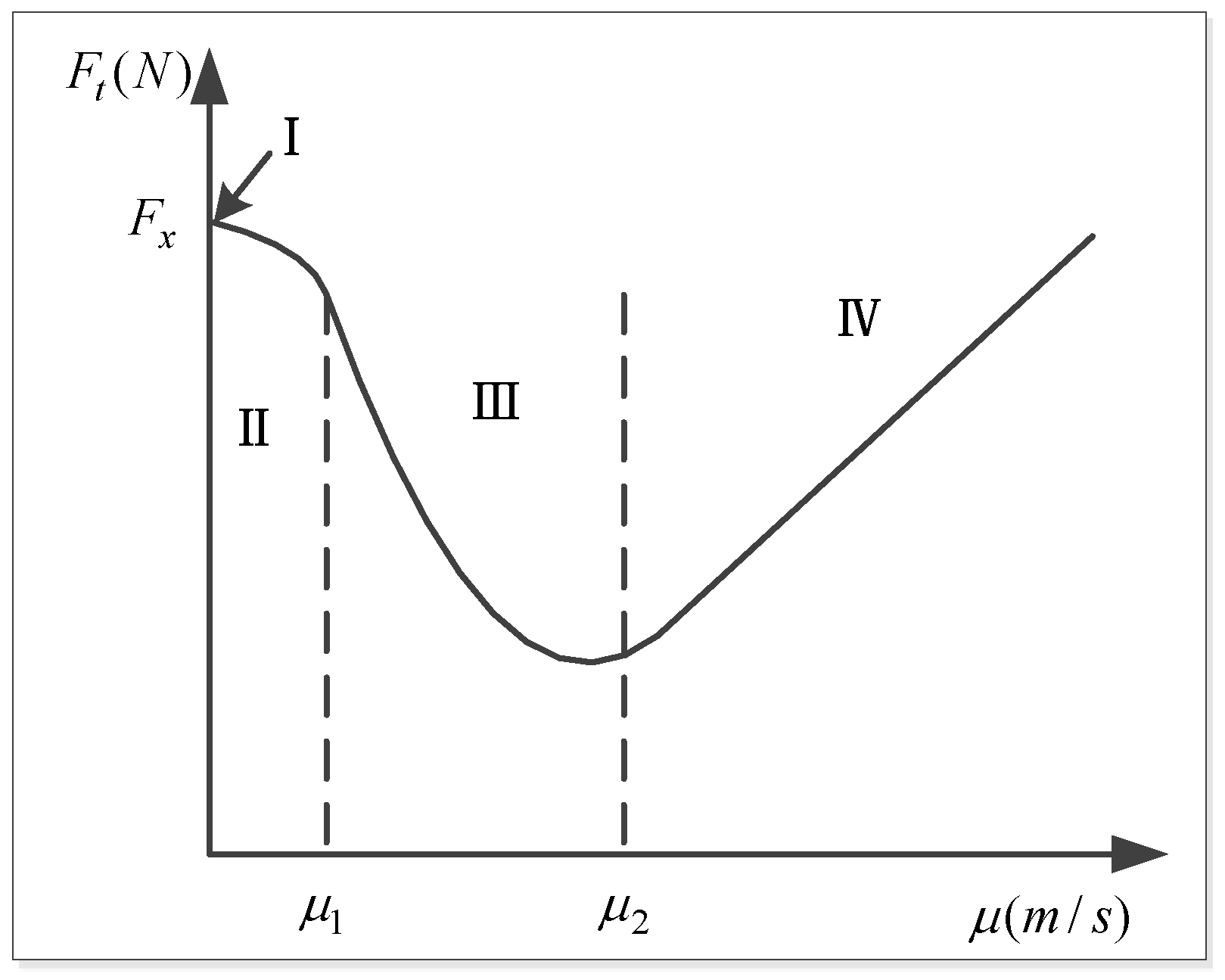
3.2. Friction Model
3.3. AC Servo Motor Model
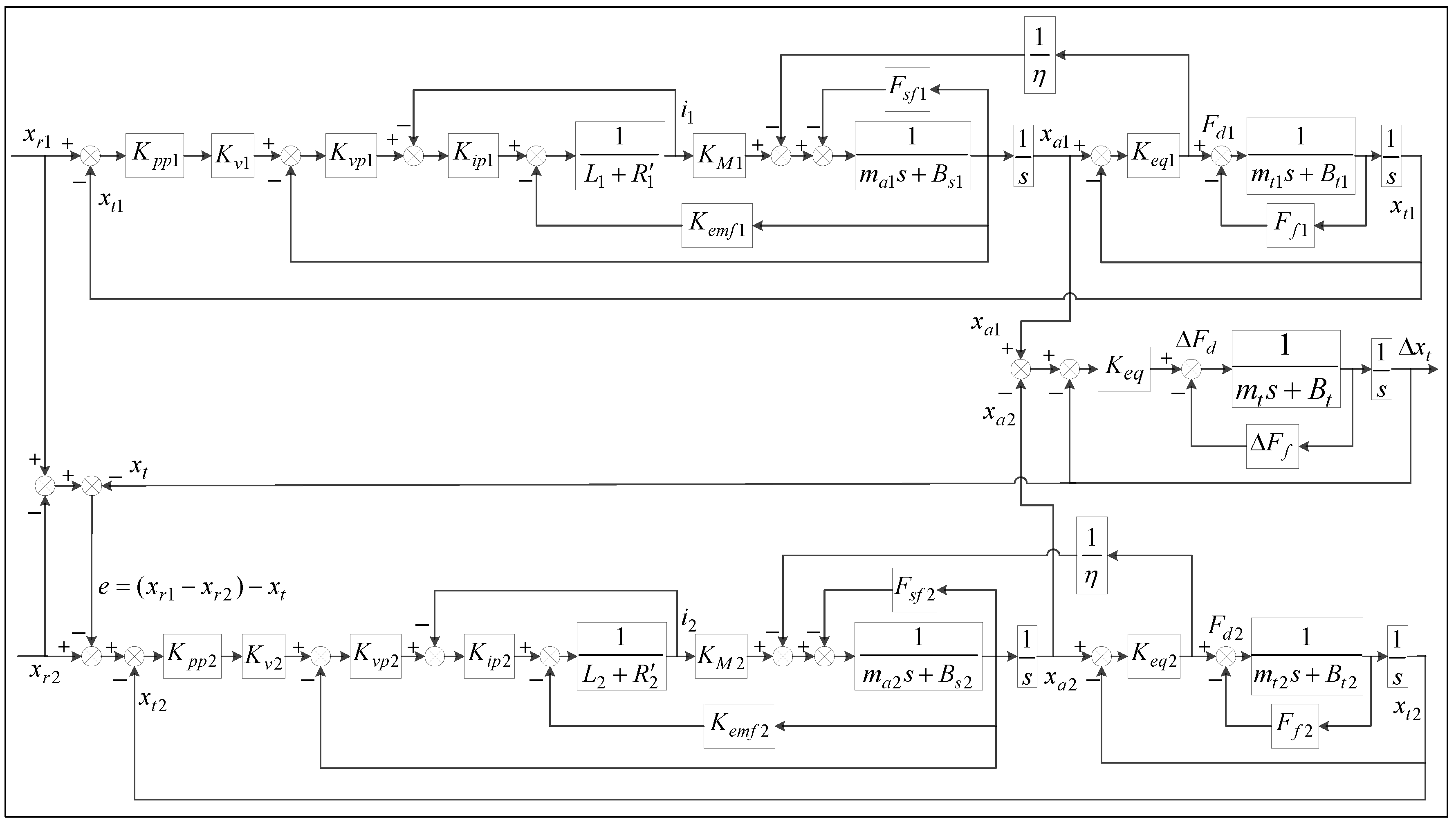
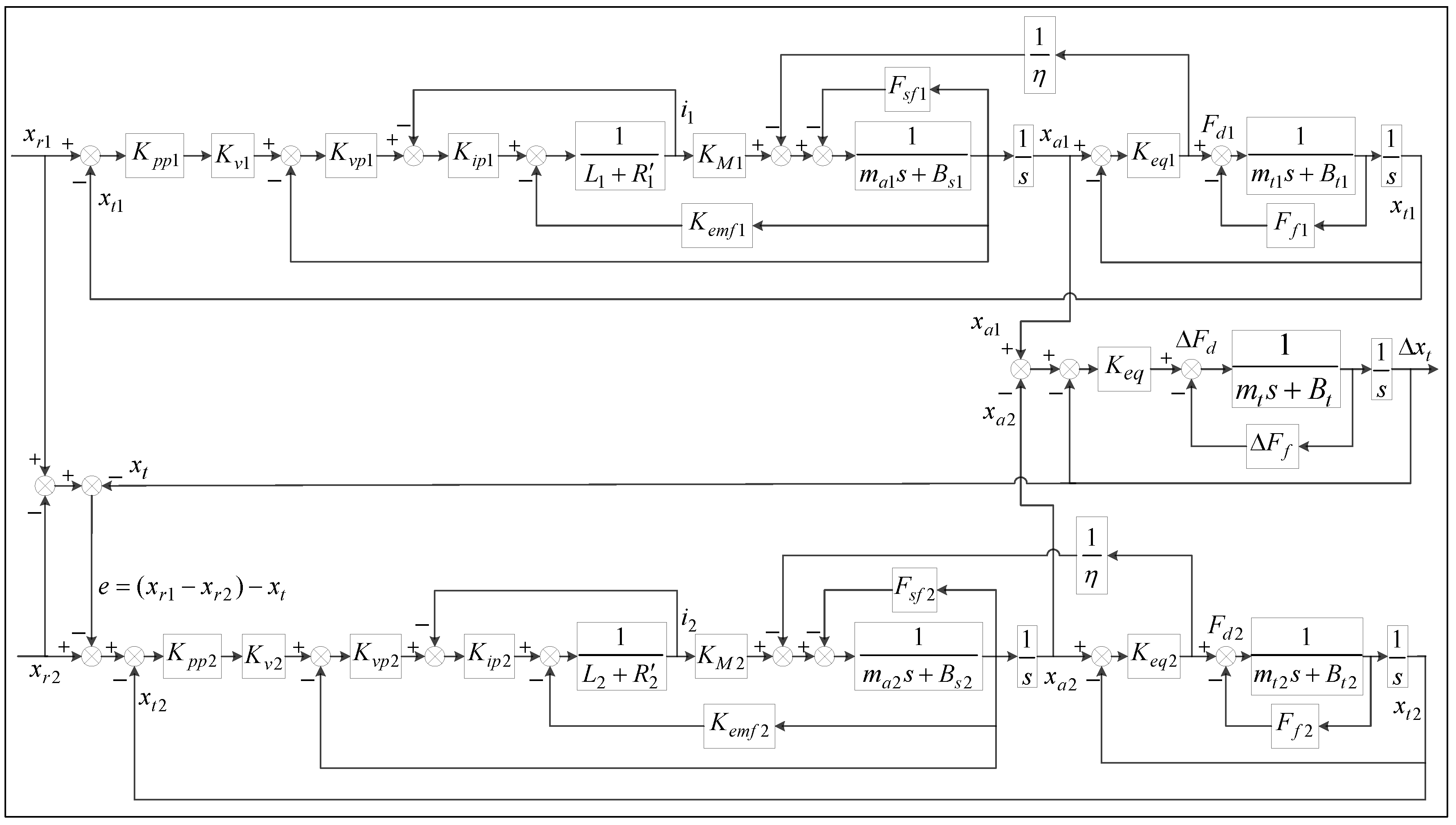
3.4. Dual Linear-Motor Differential-Drive System Block Diagram Model
4. Simulation and Analysis
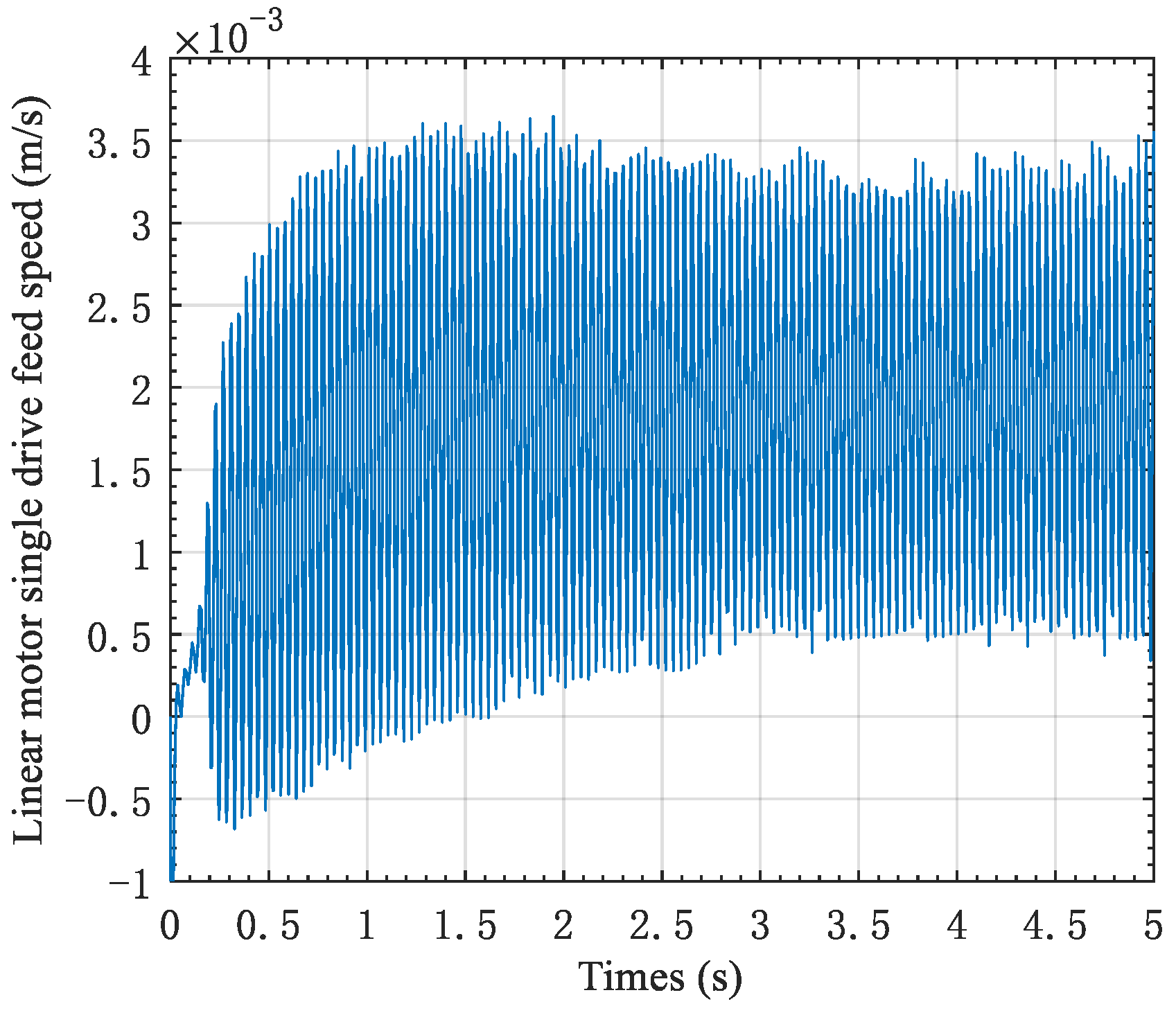
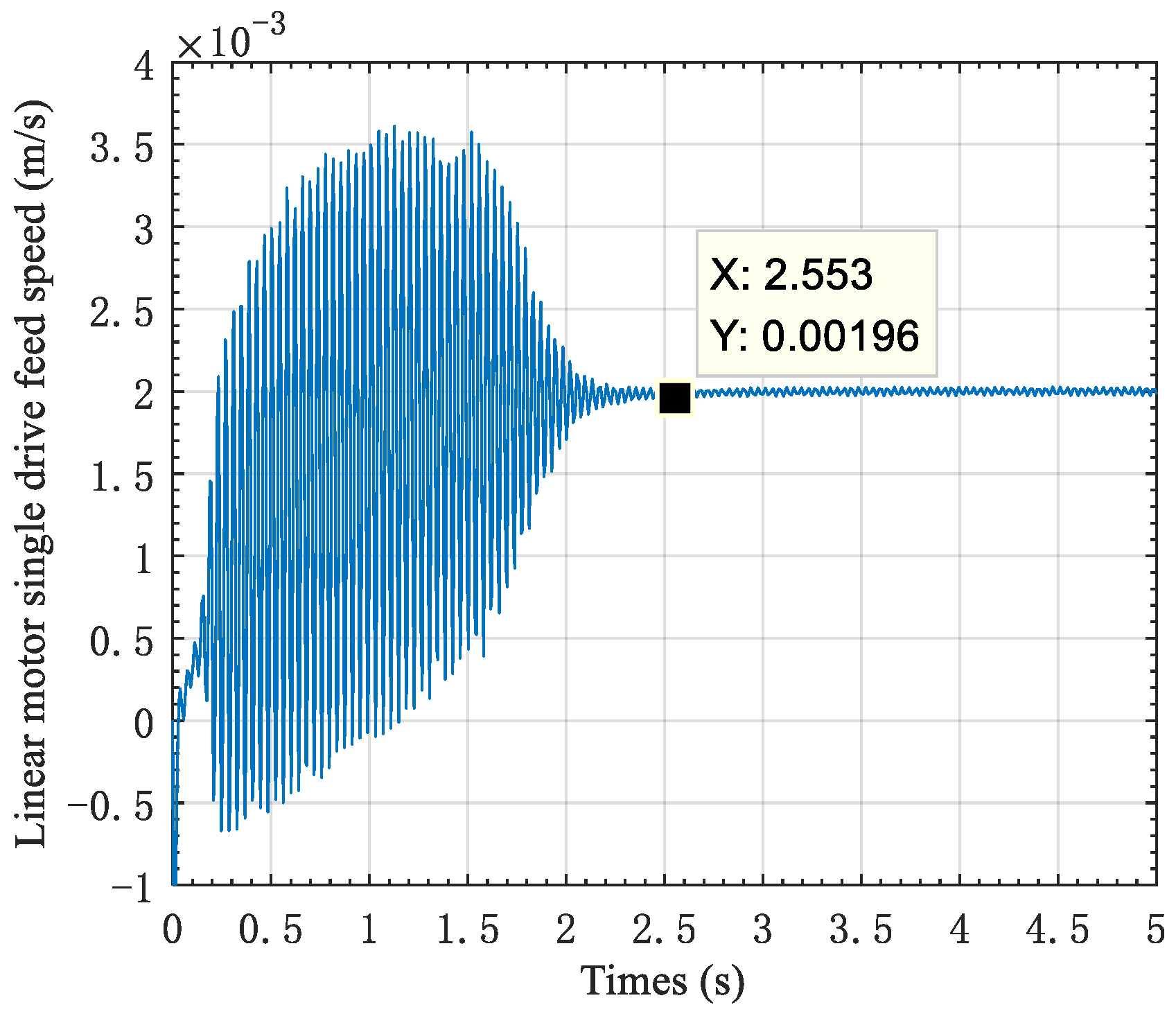
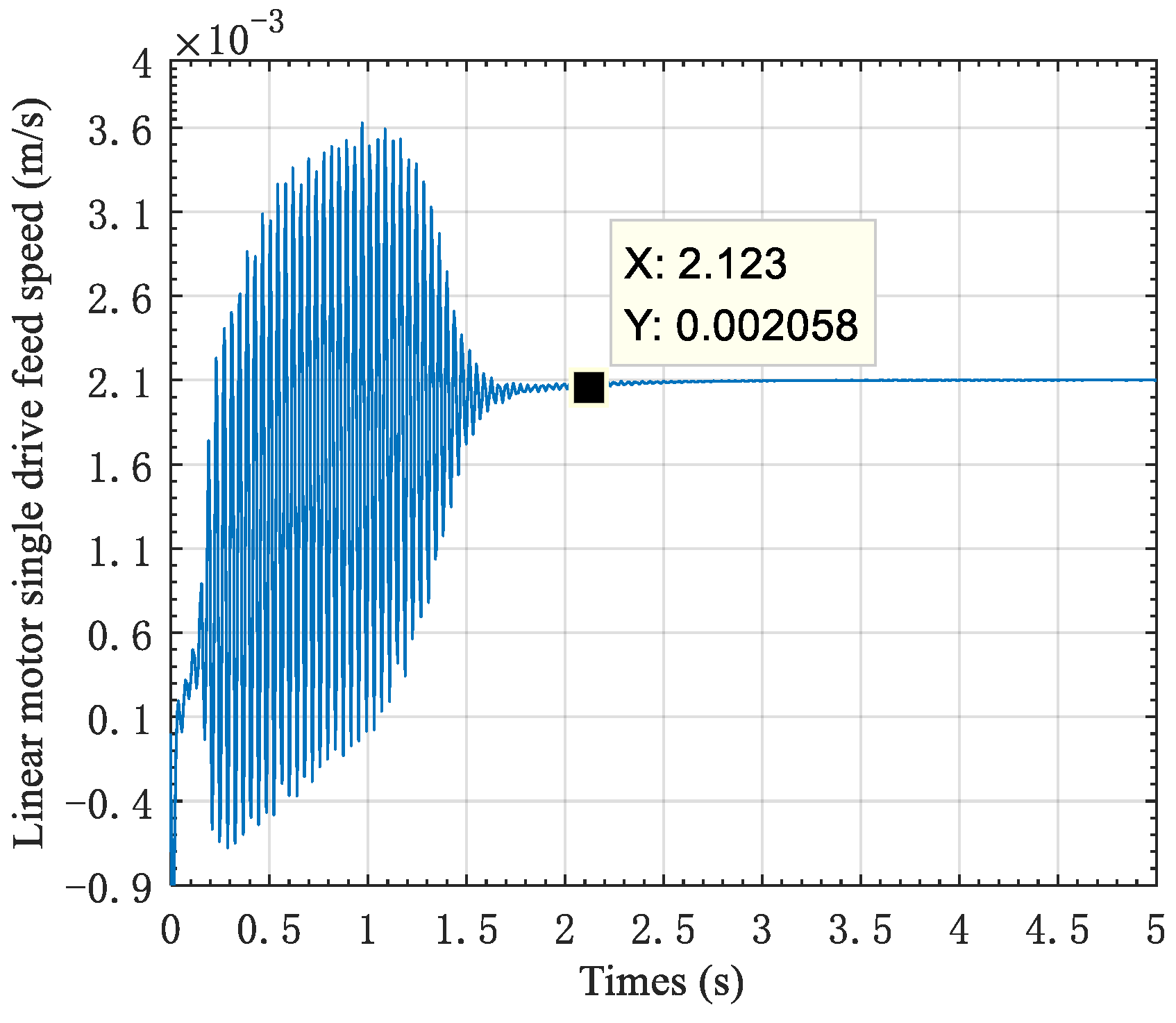
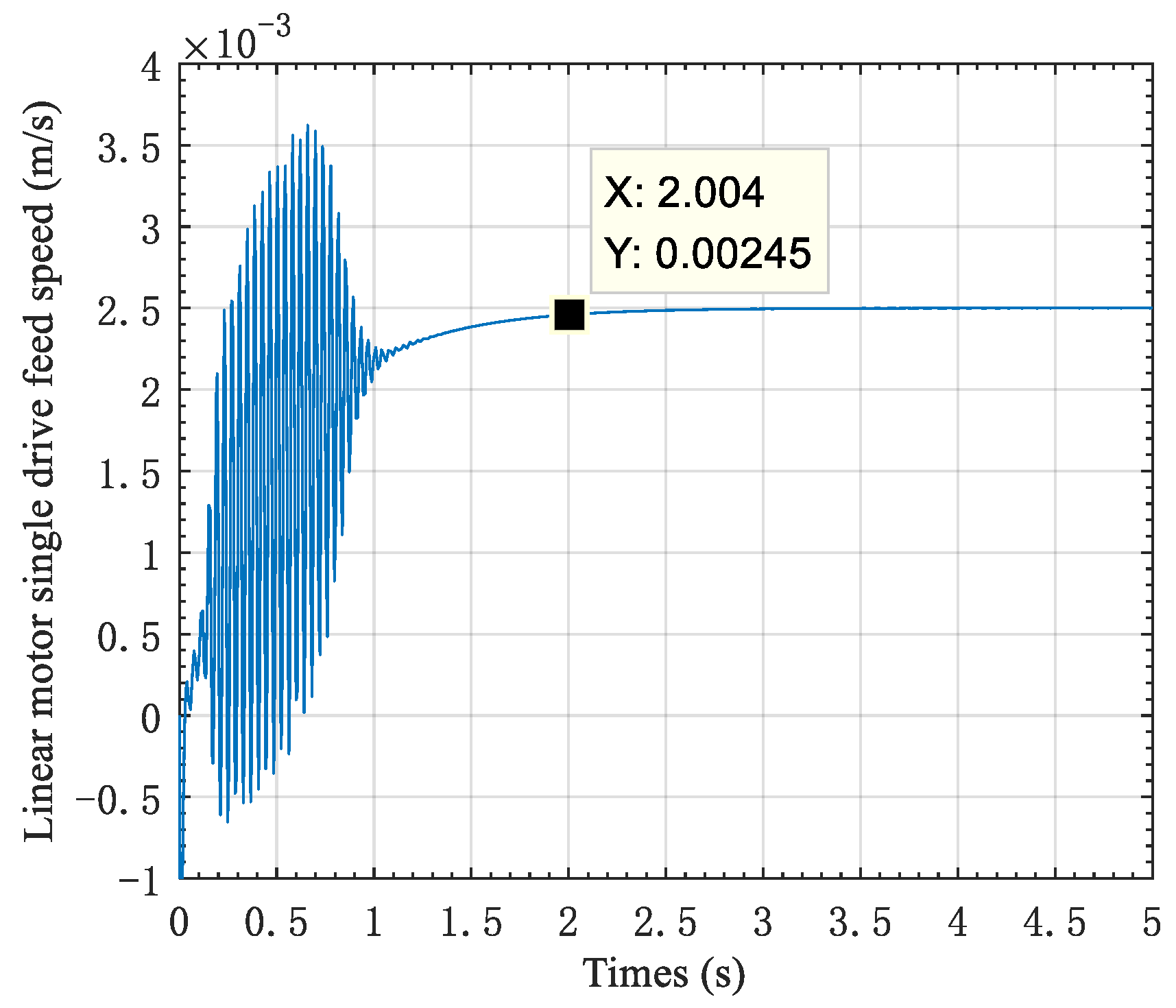
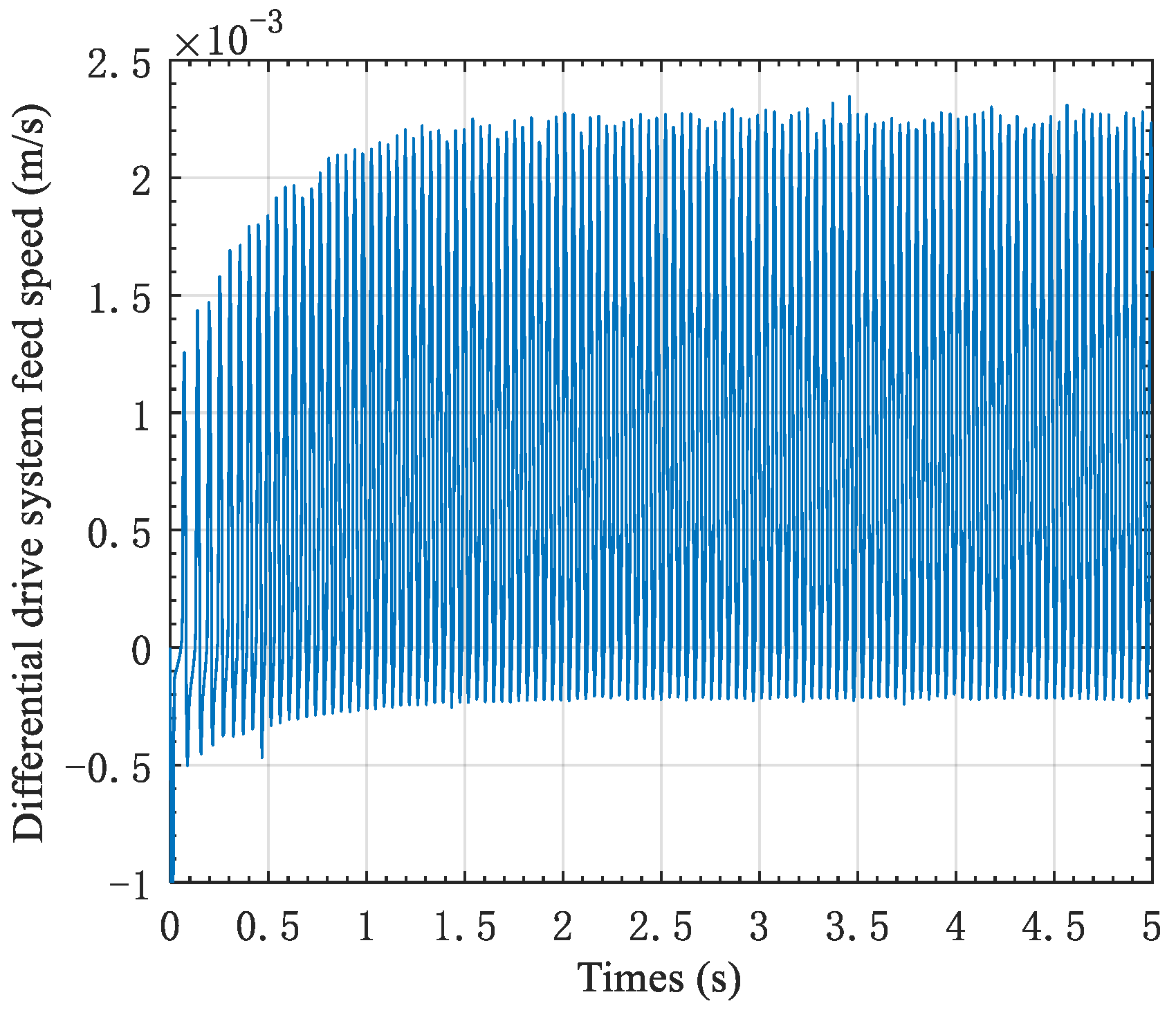
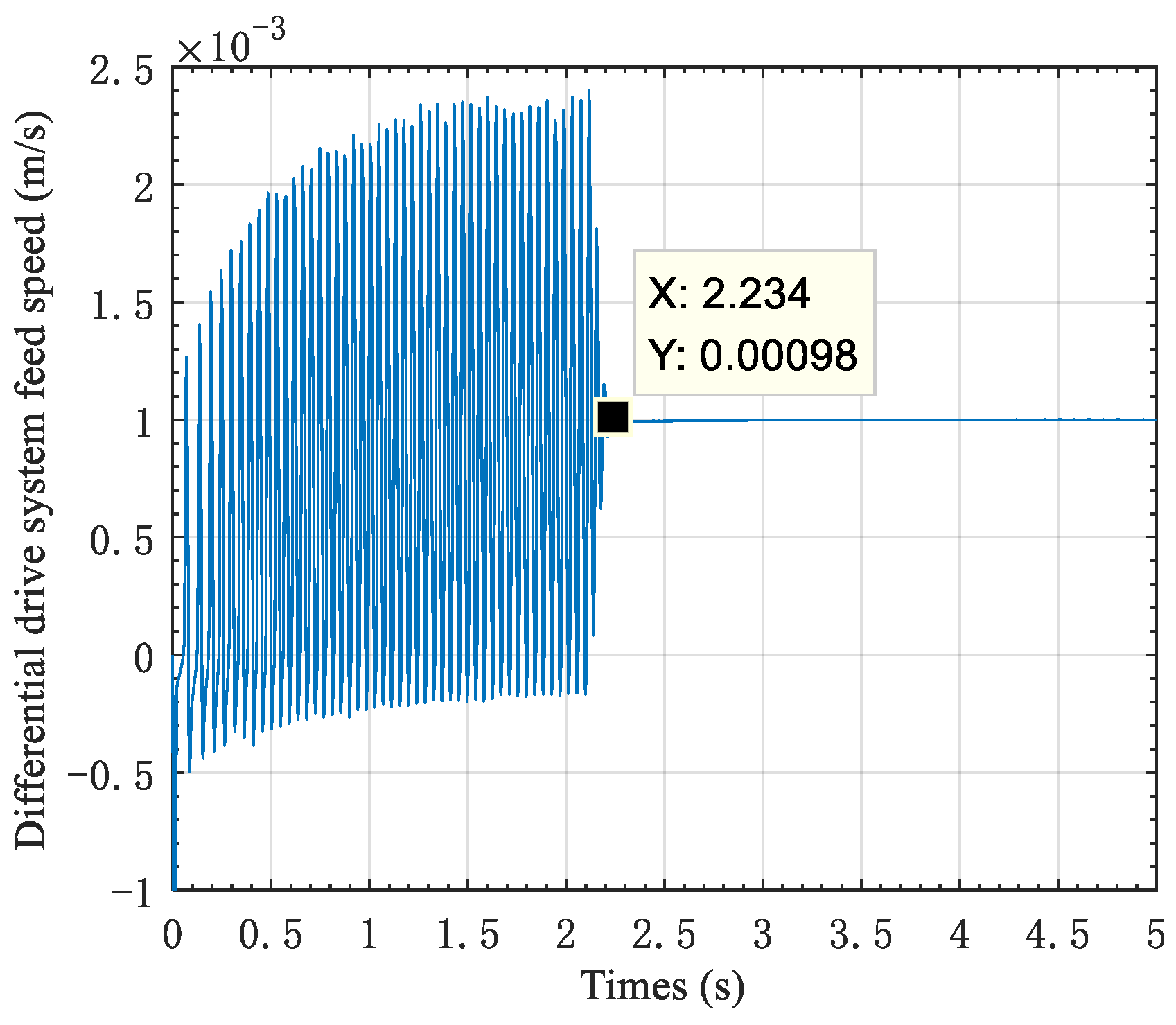
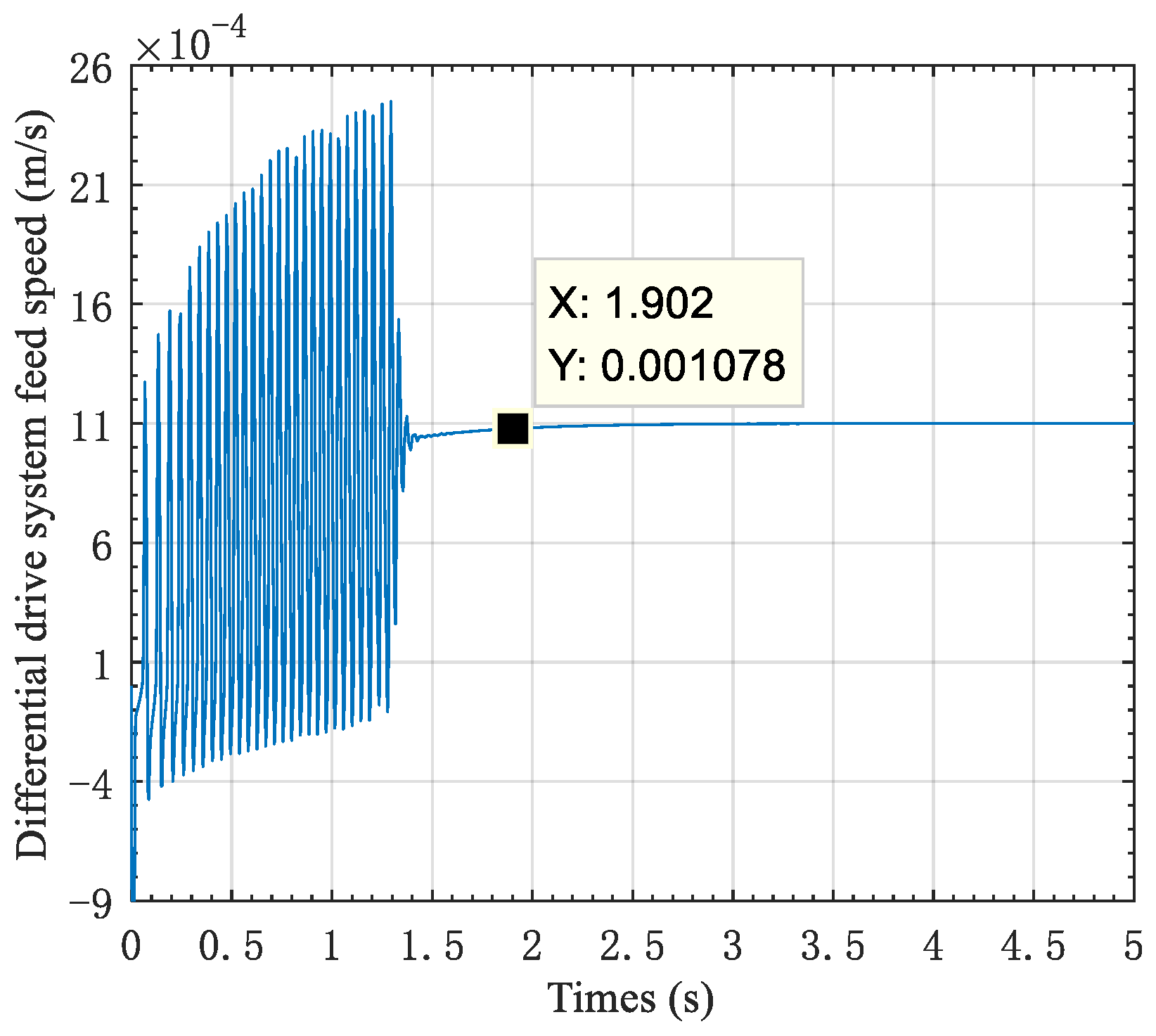
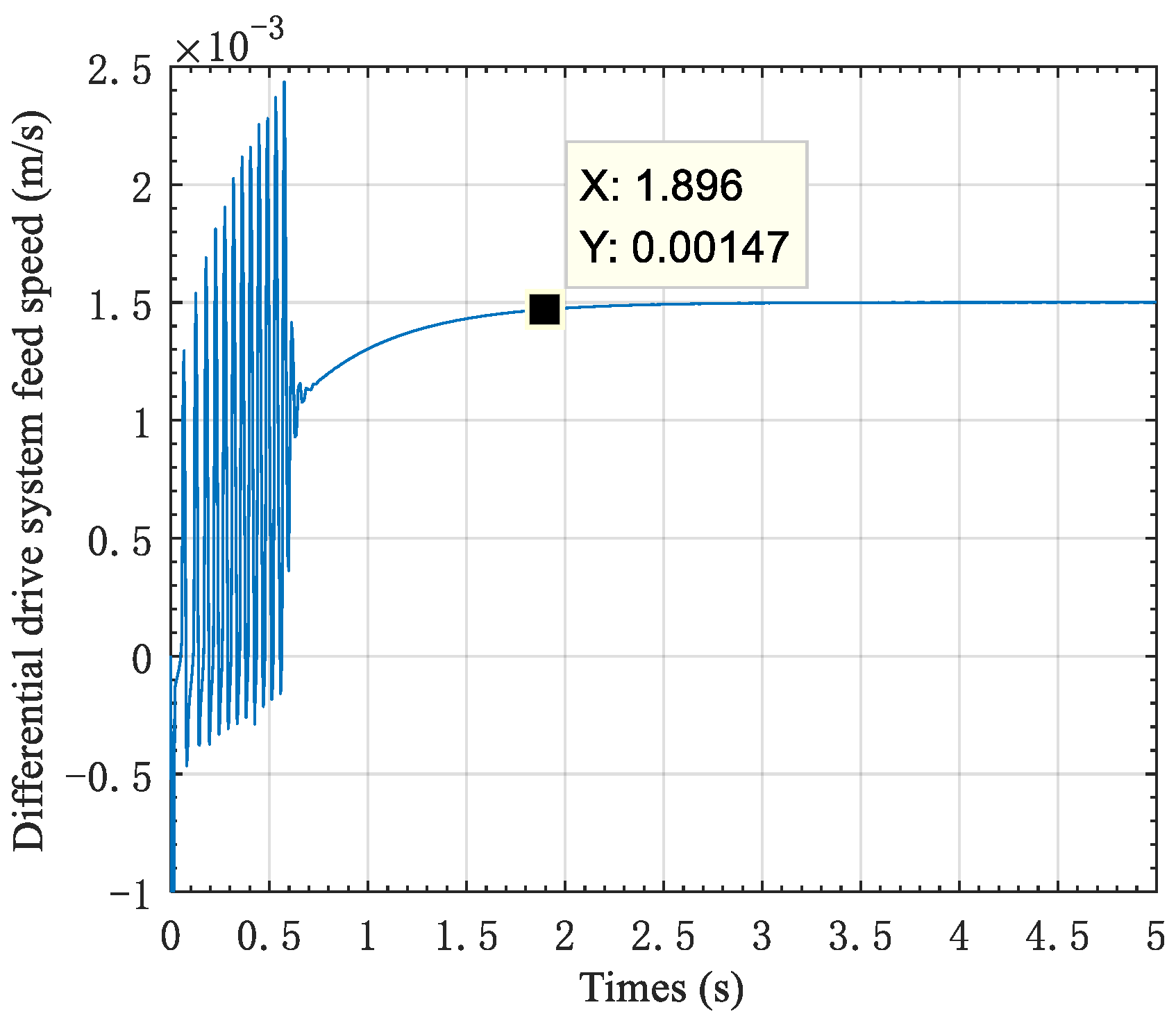
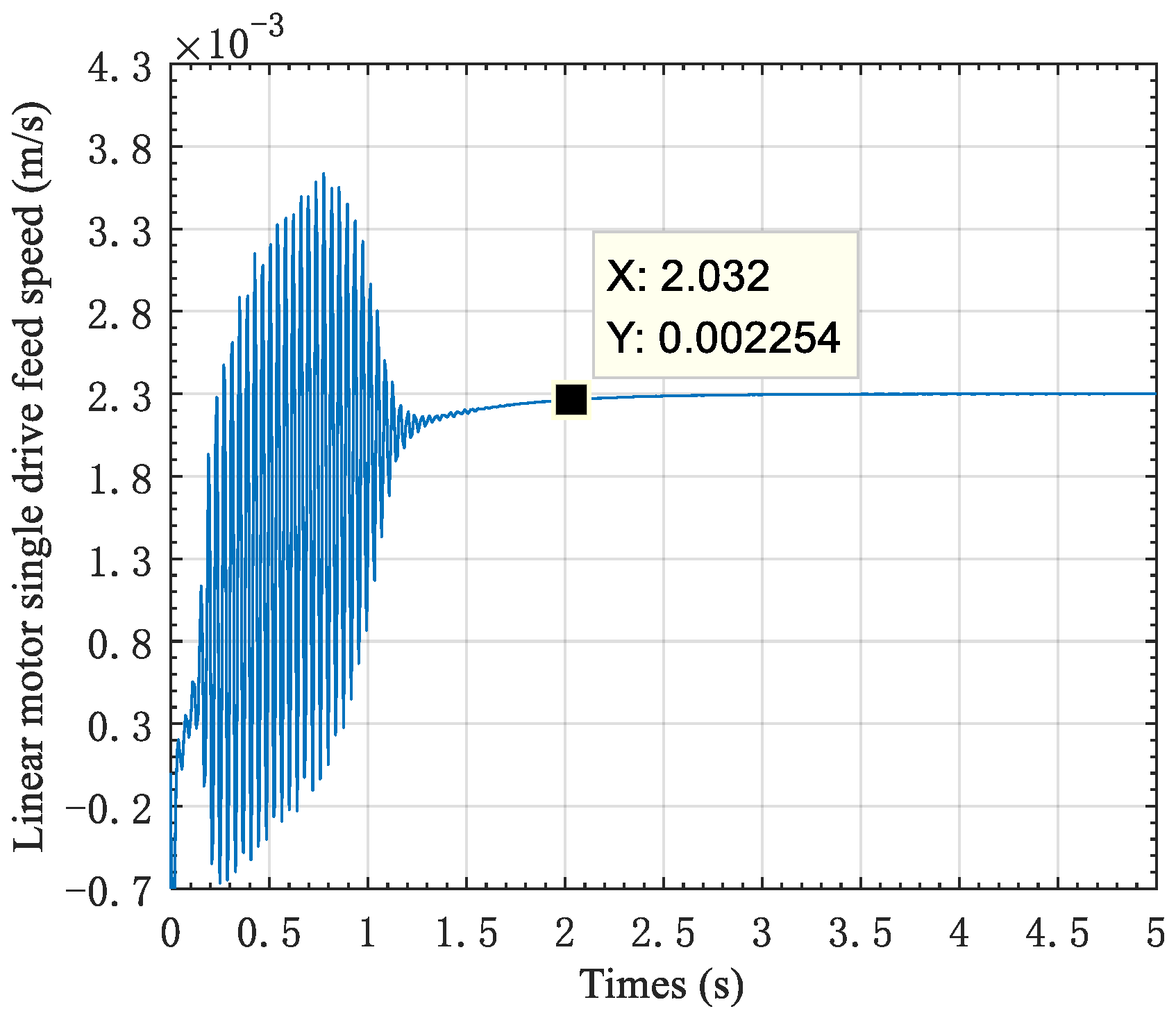
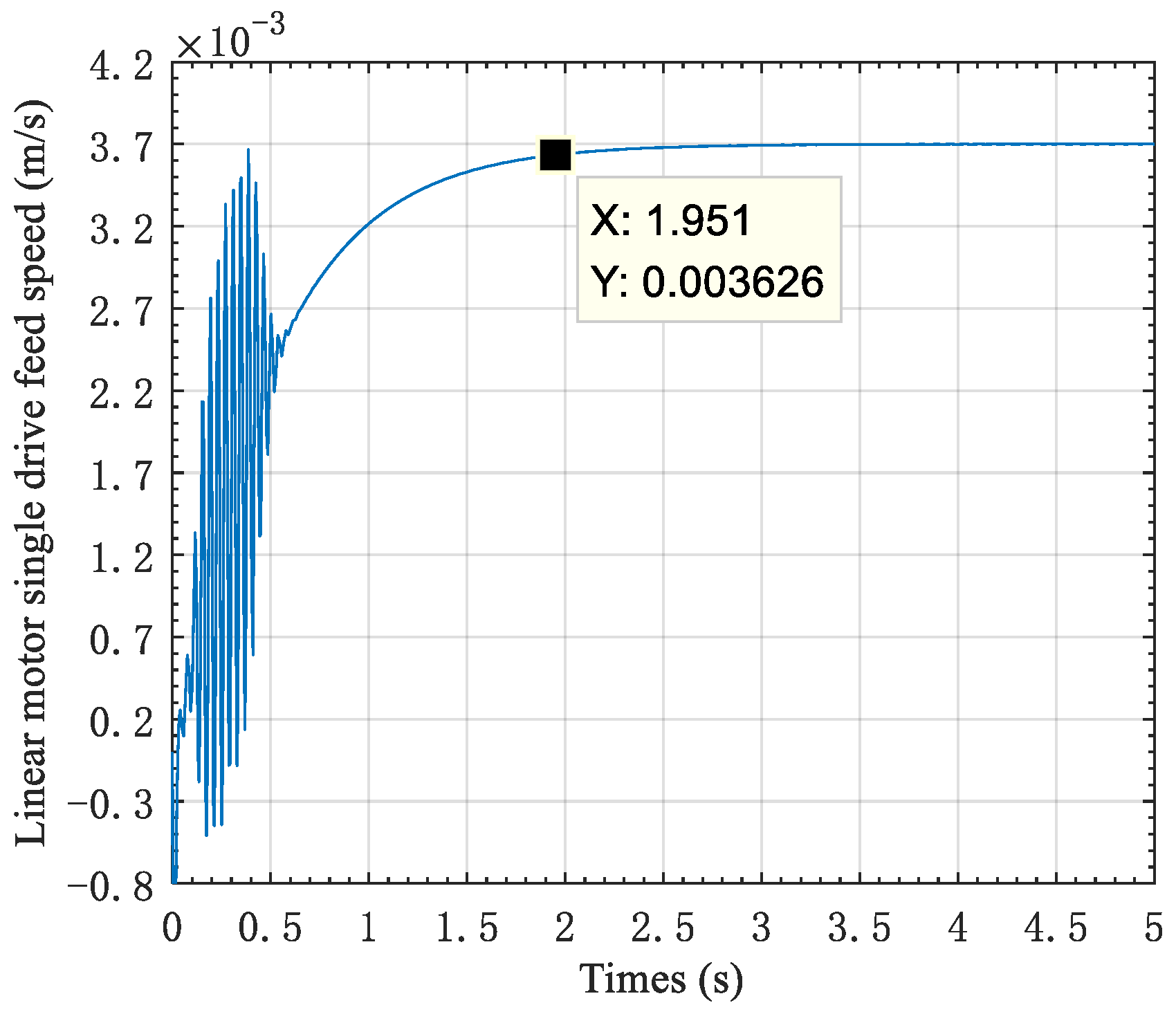
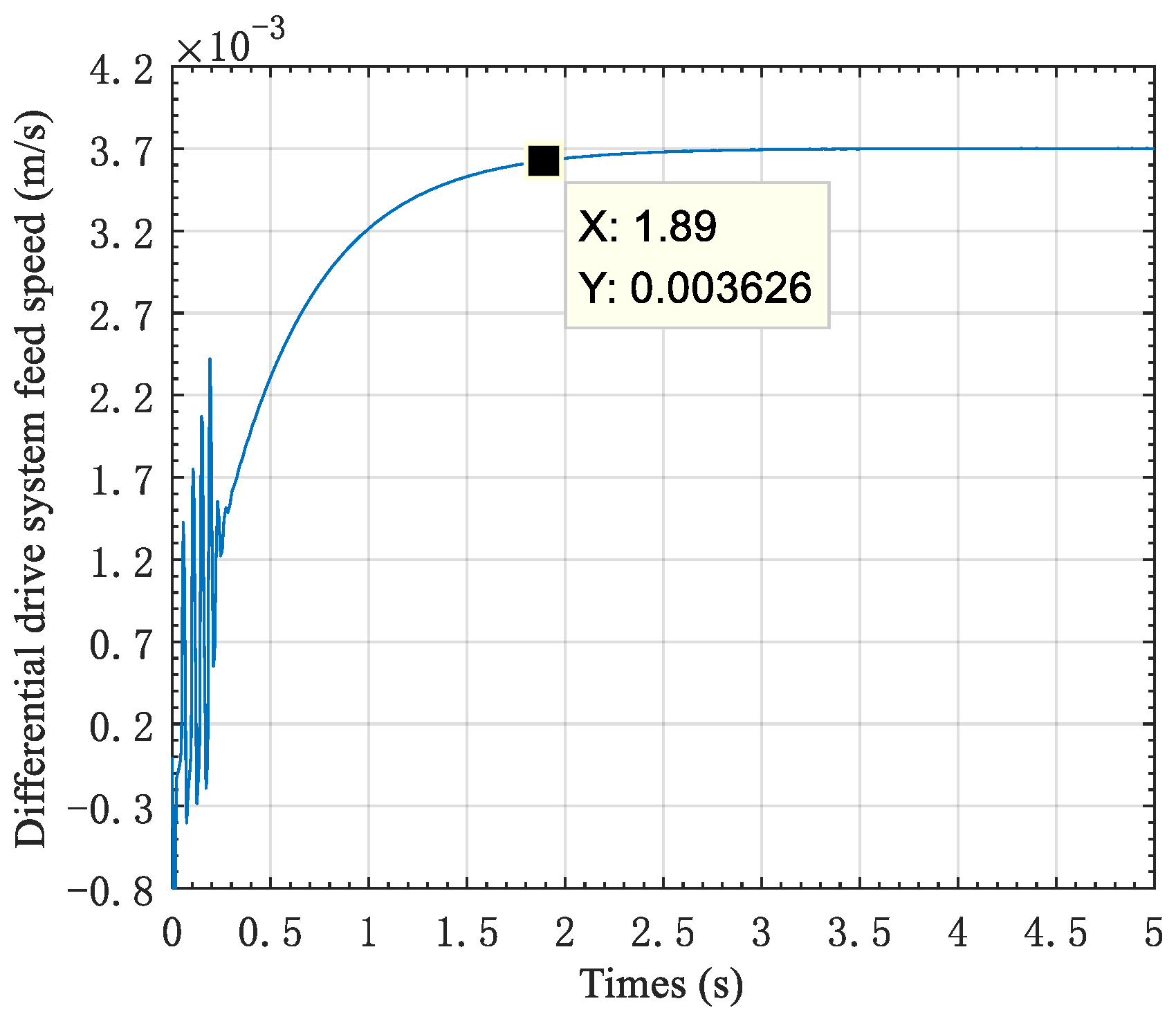
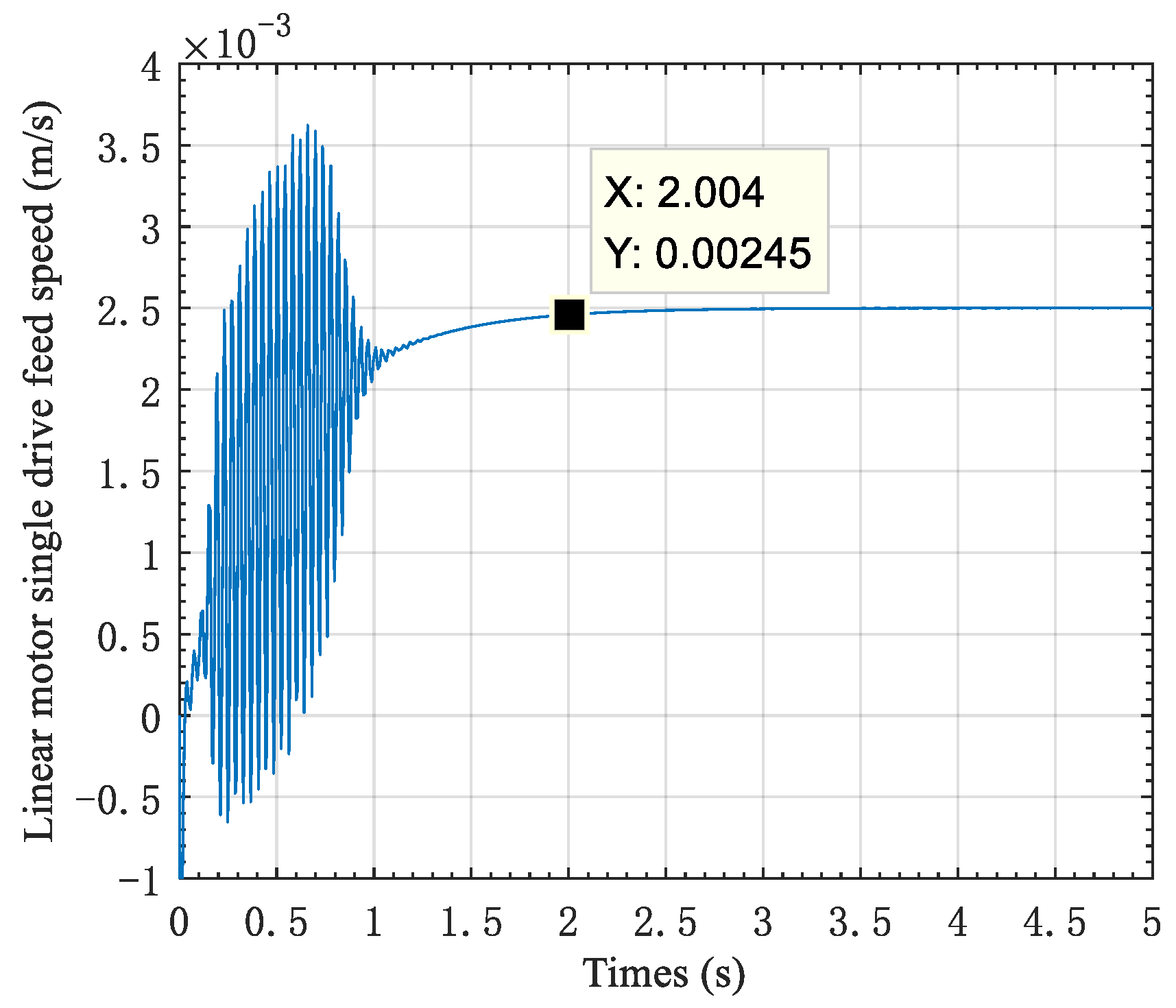
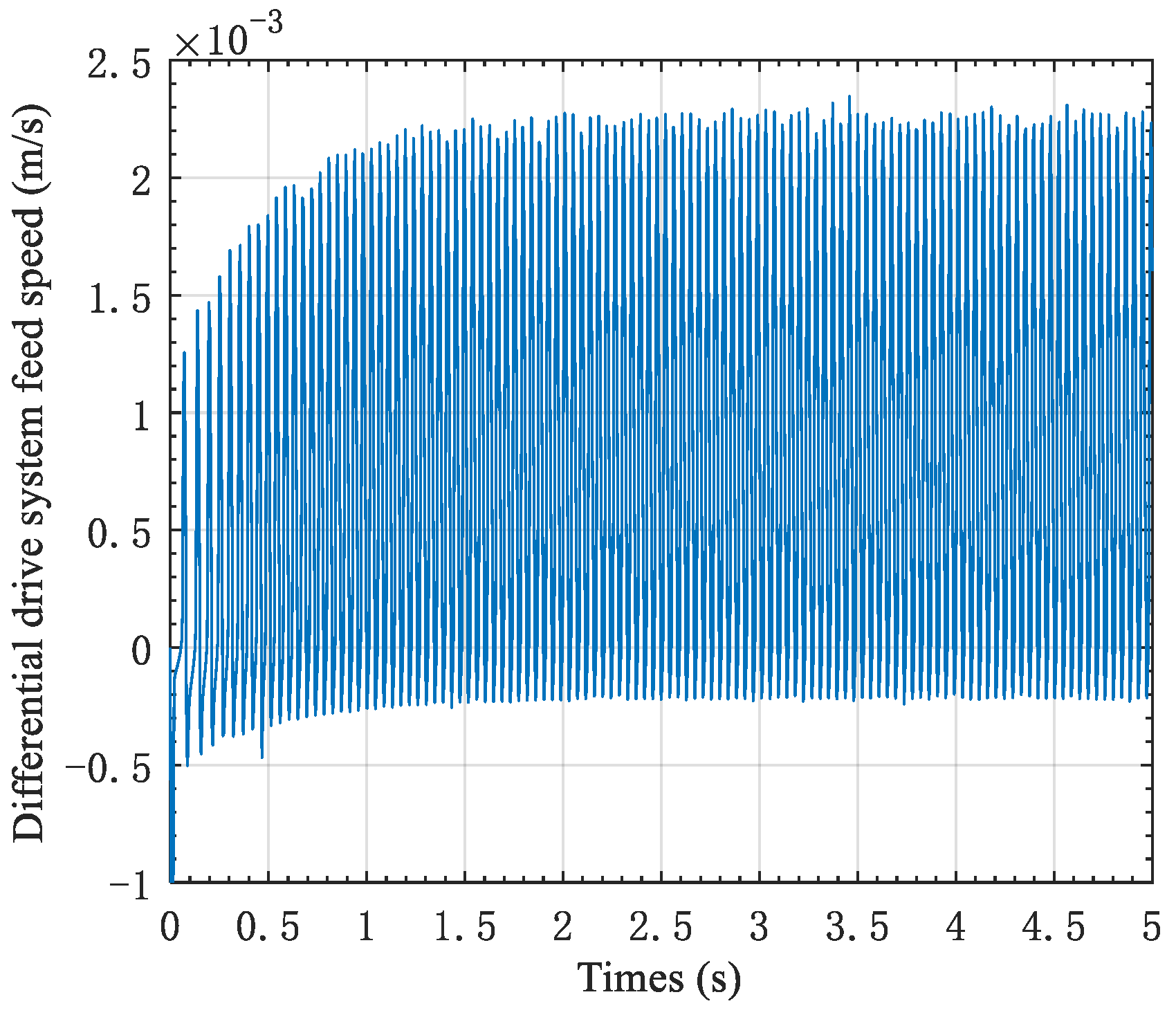
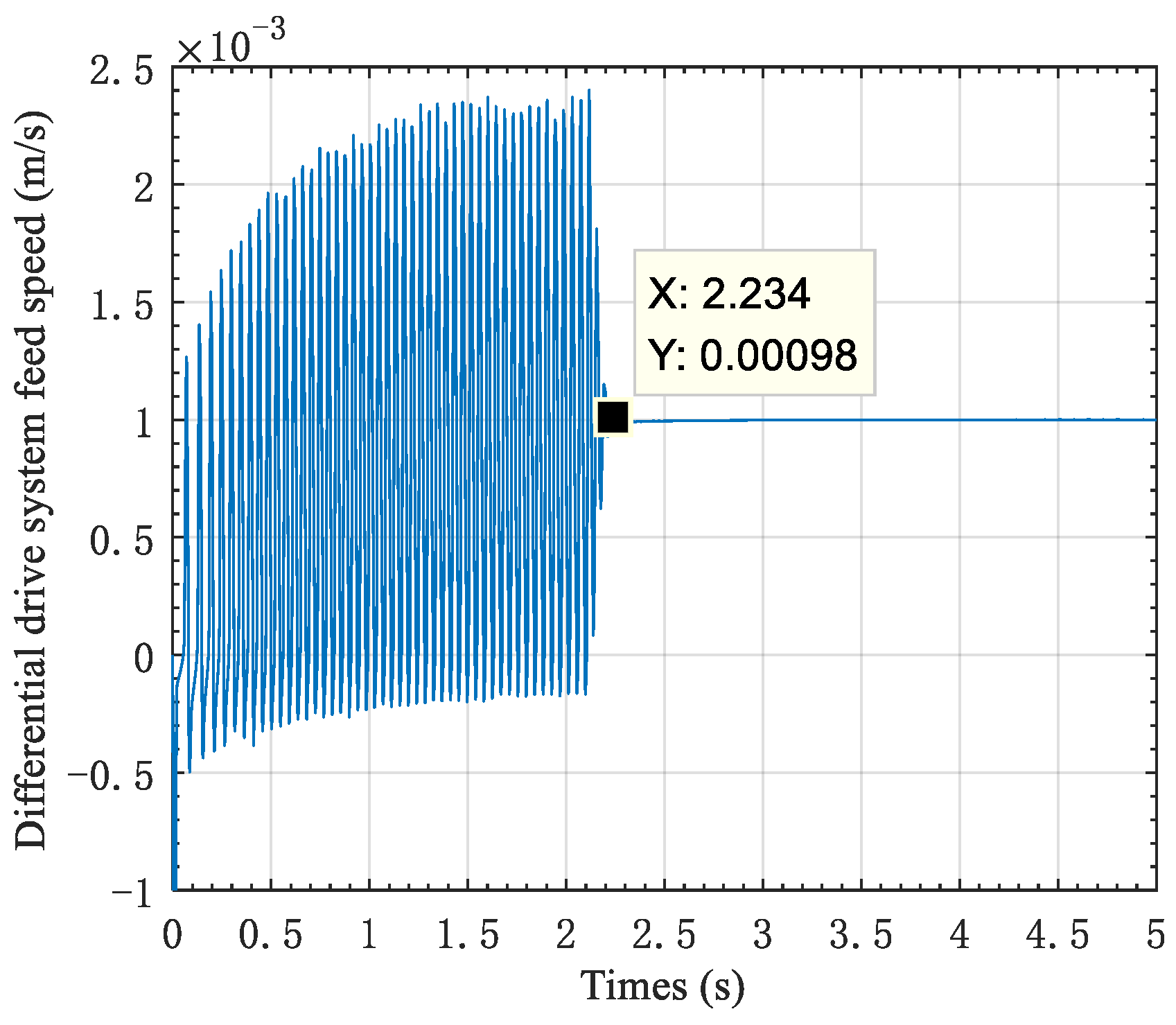
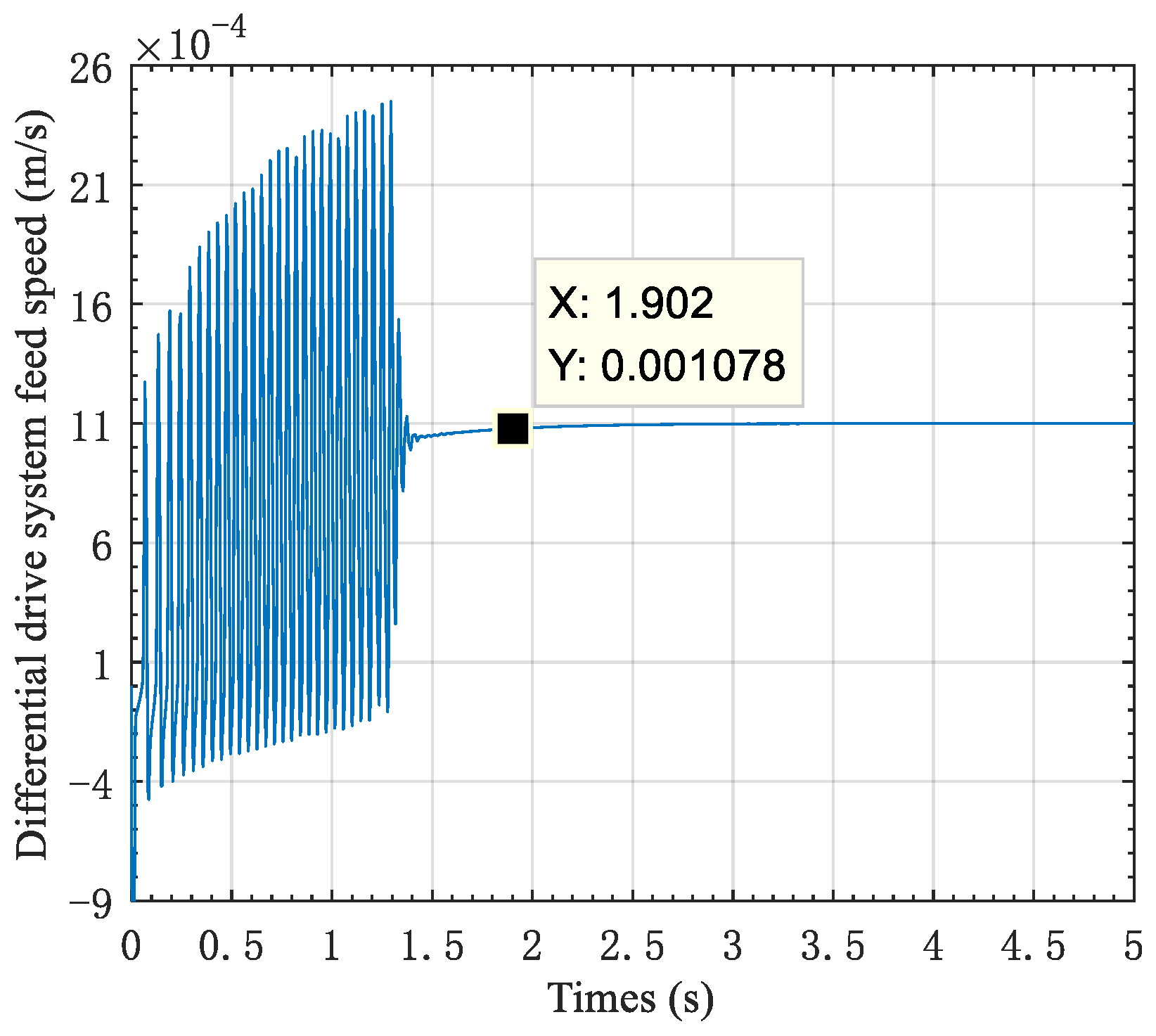
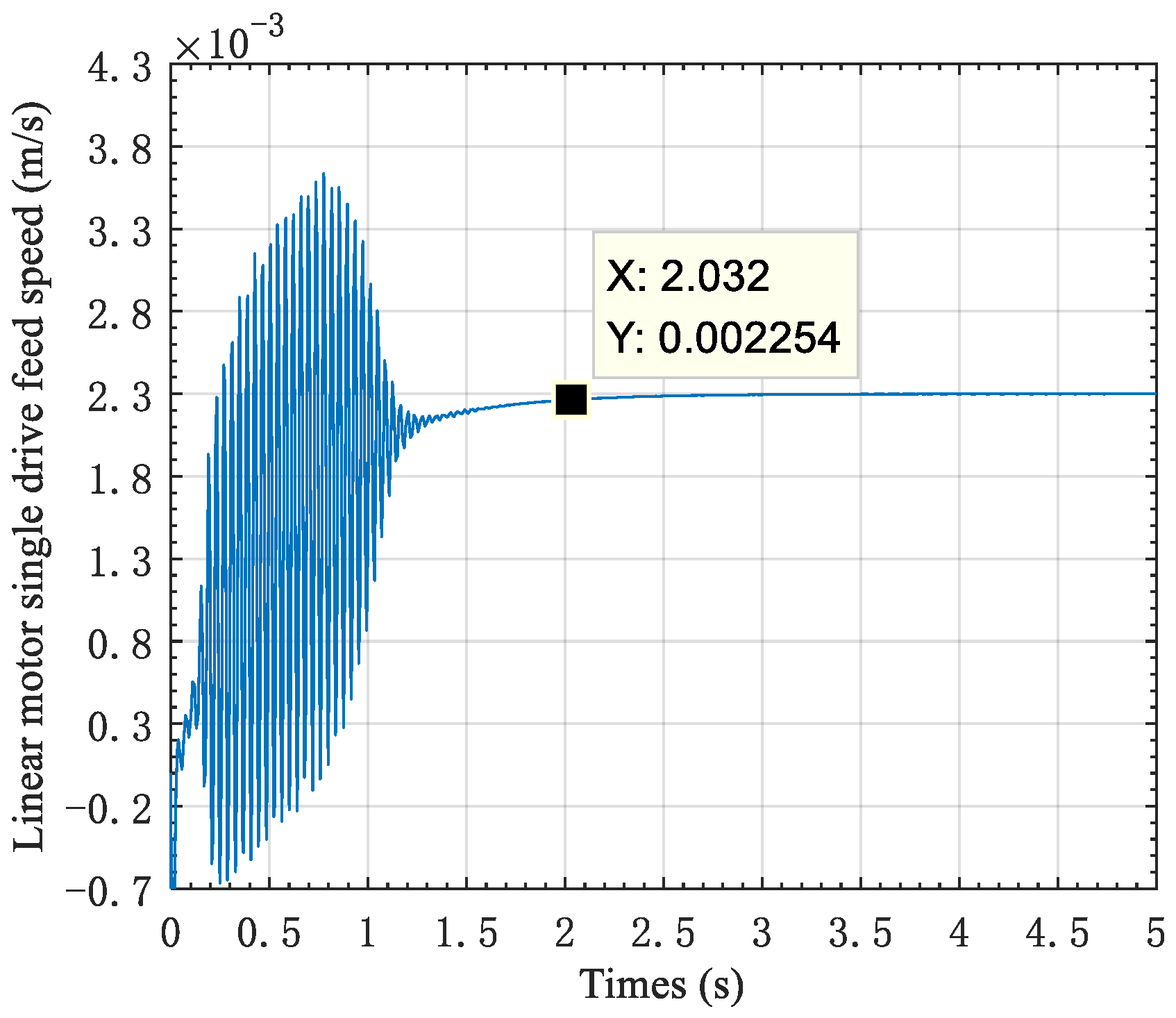
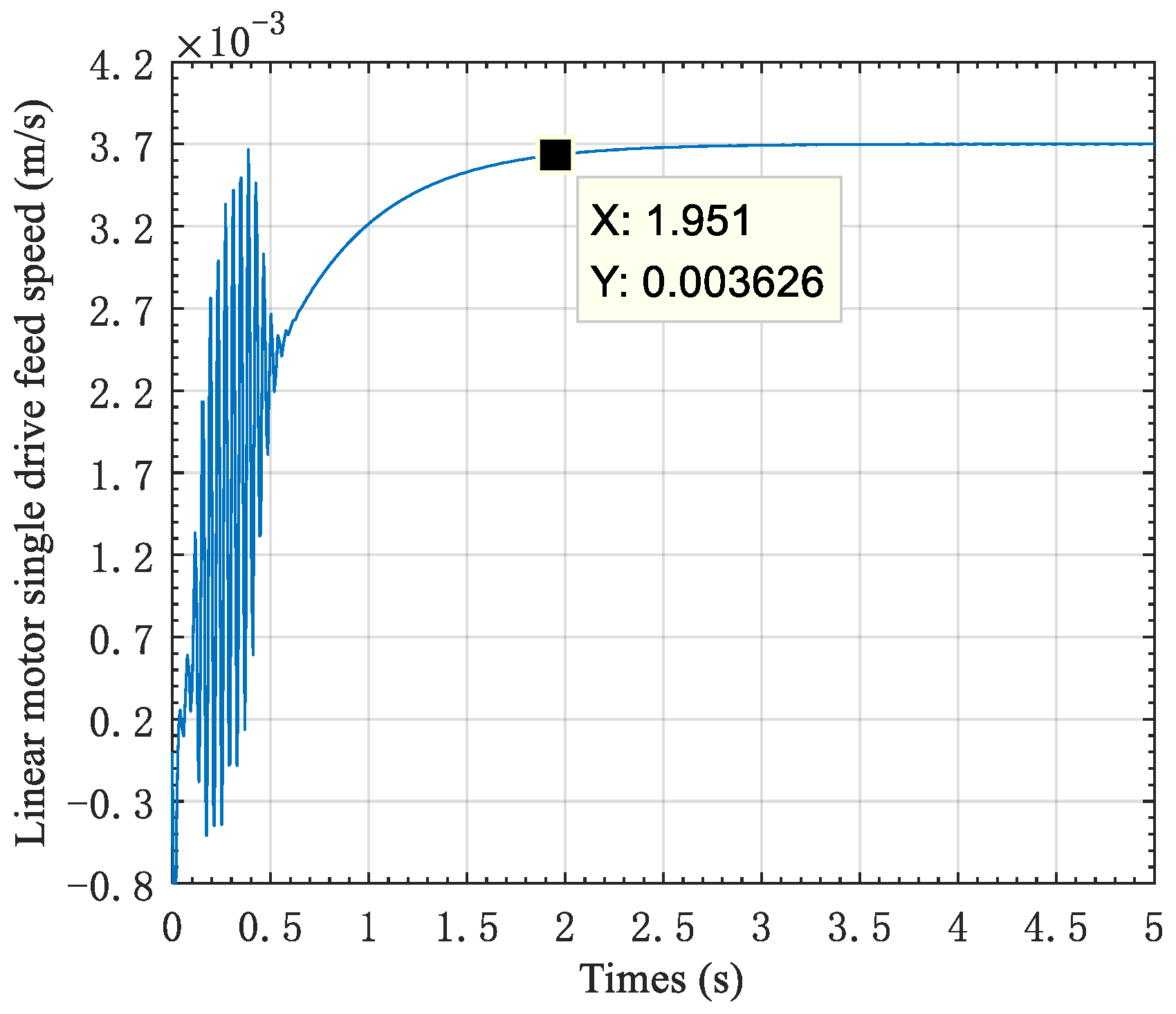
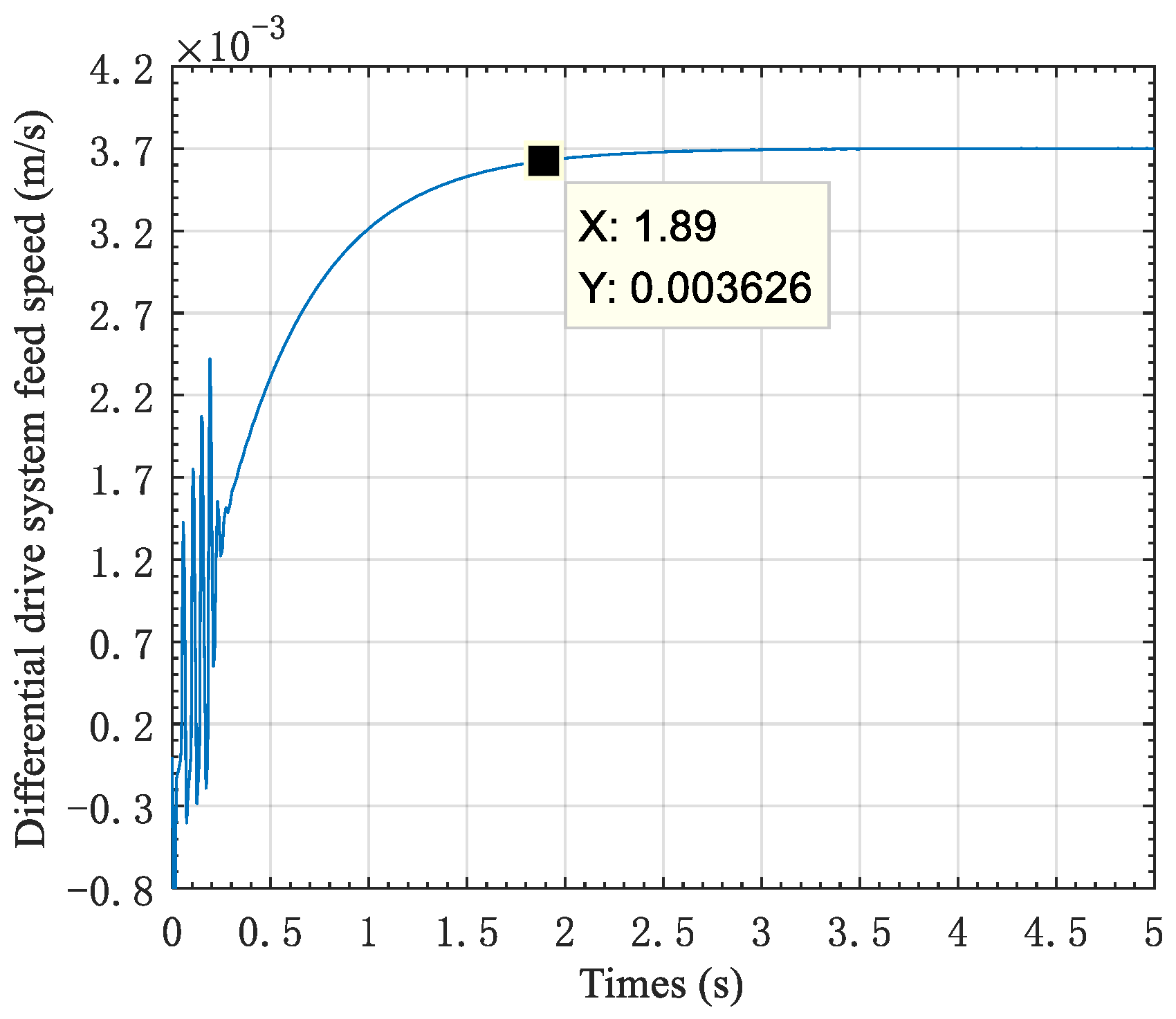
4.1. Critical Creeping Speed Analysis
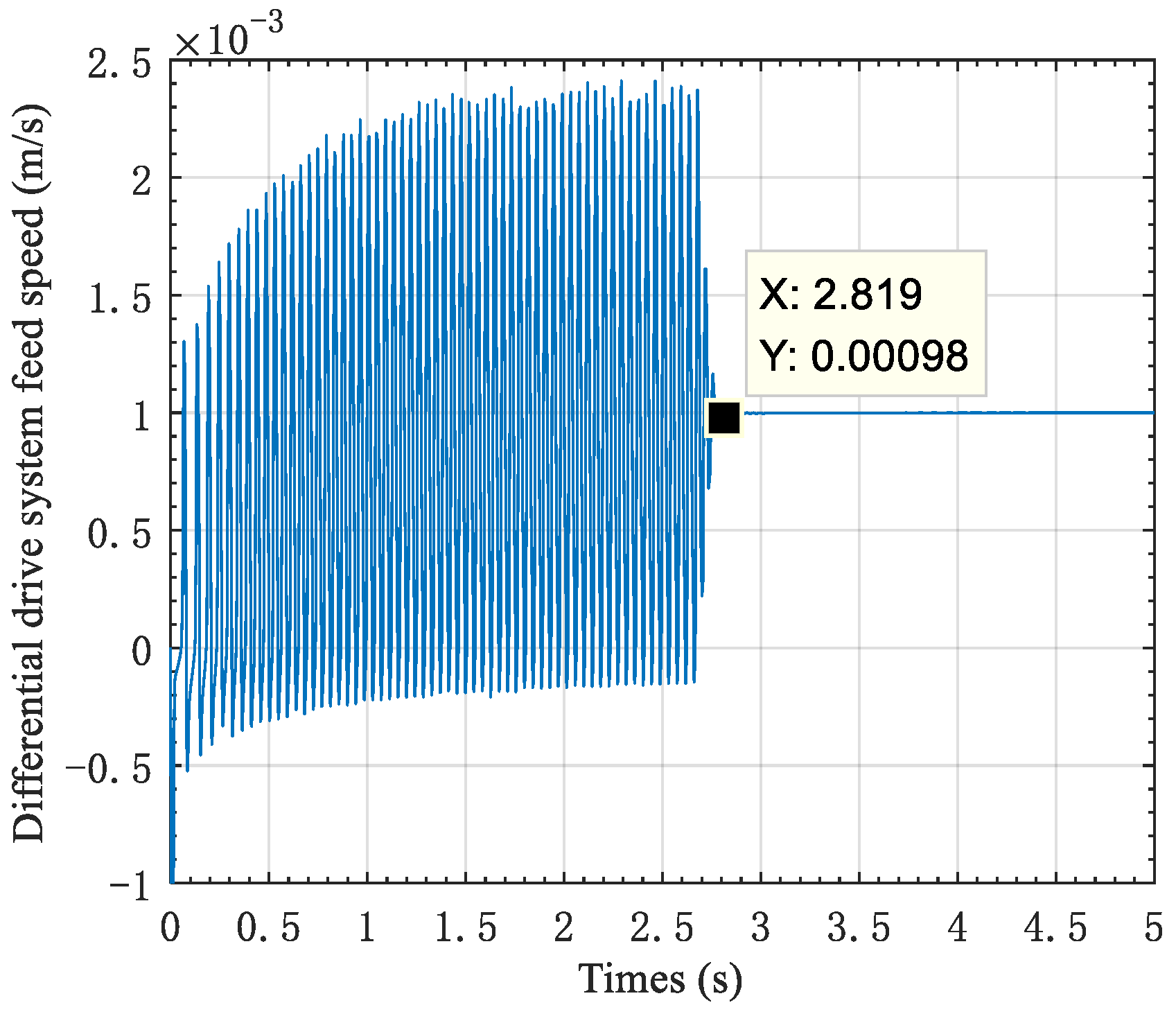
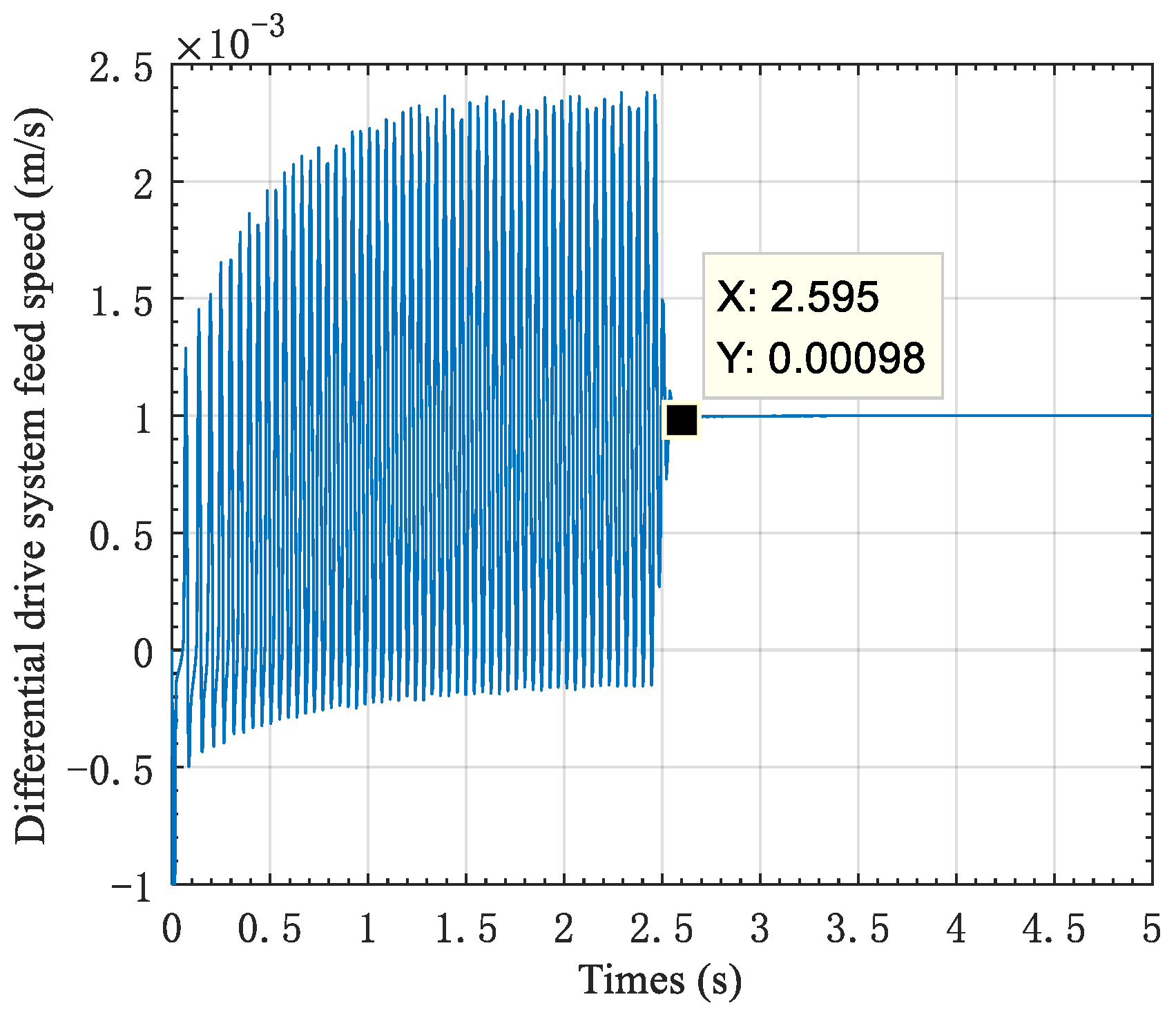
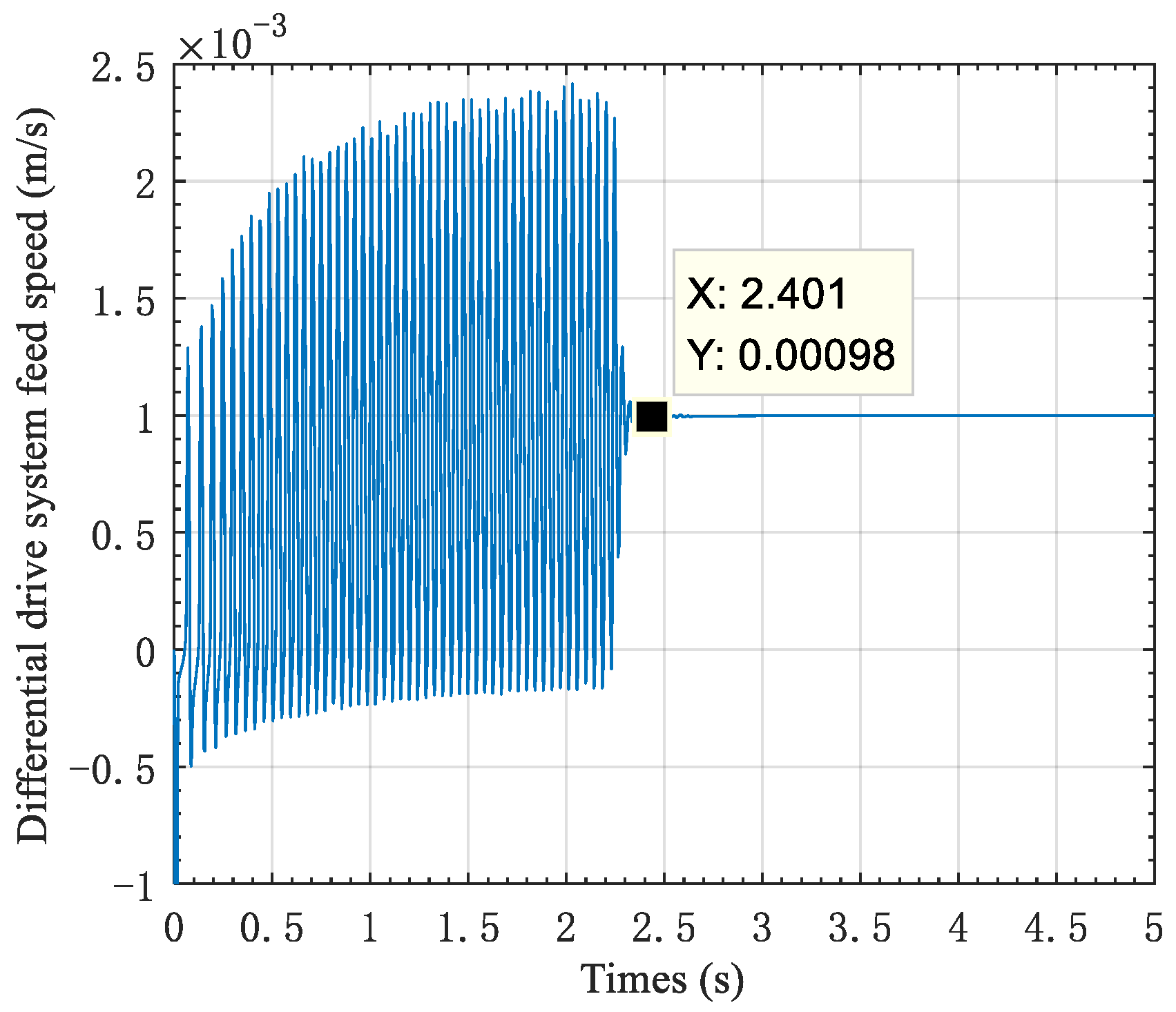
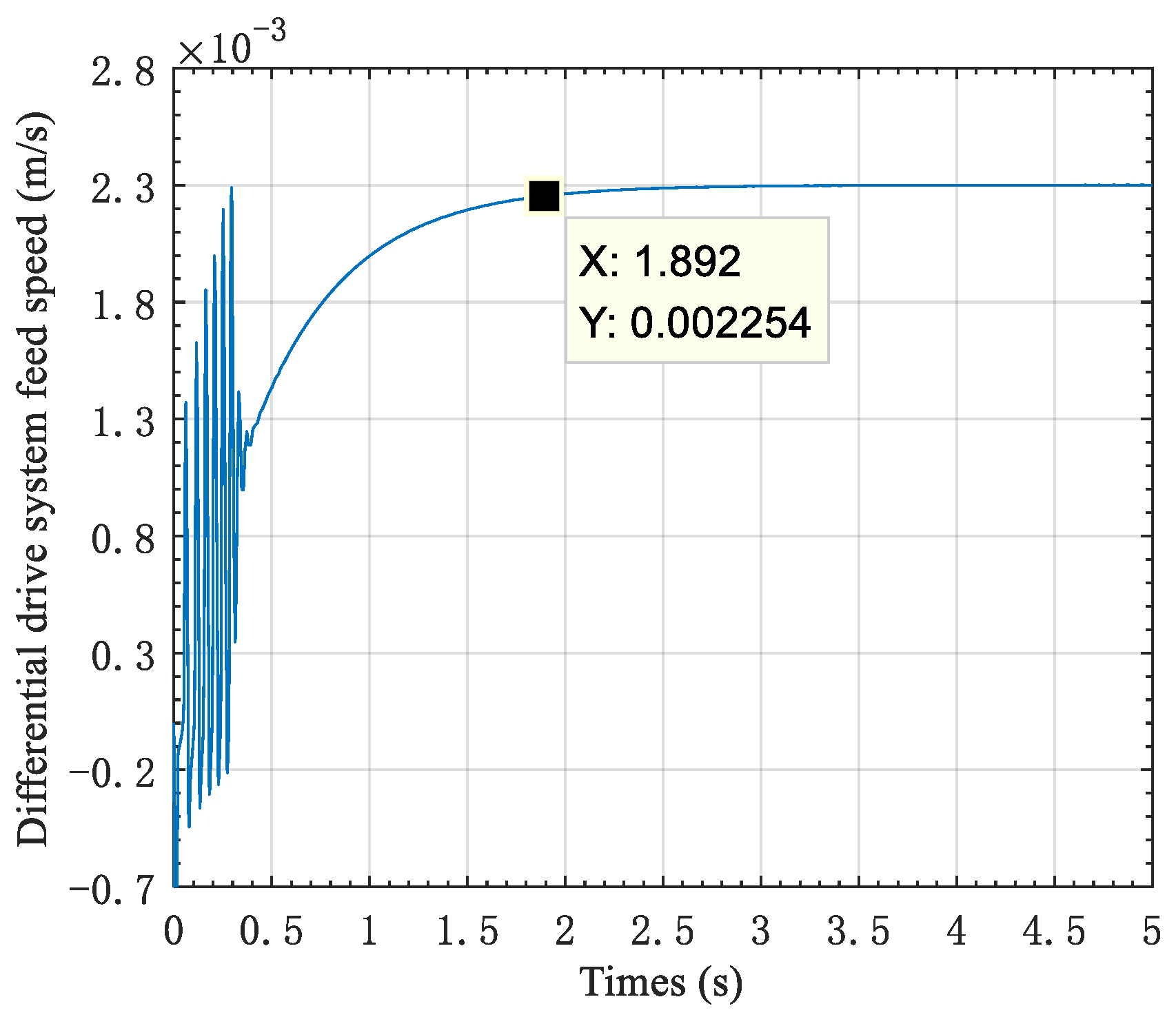
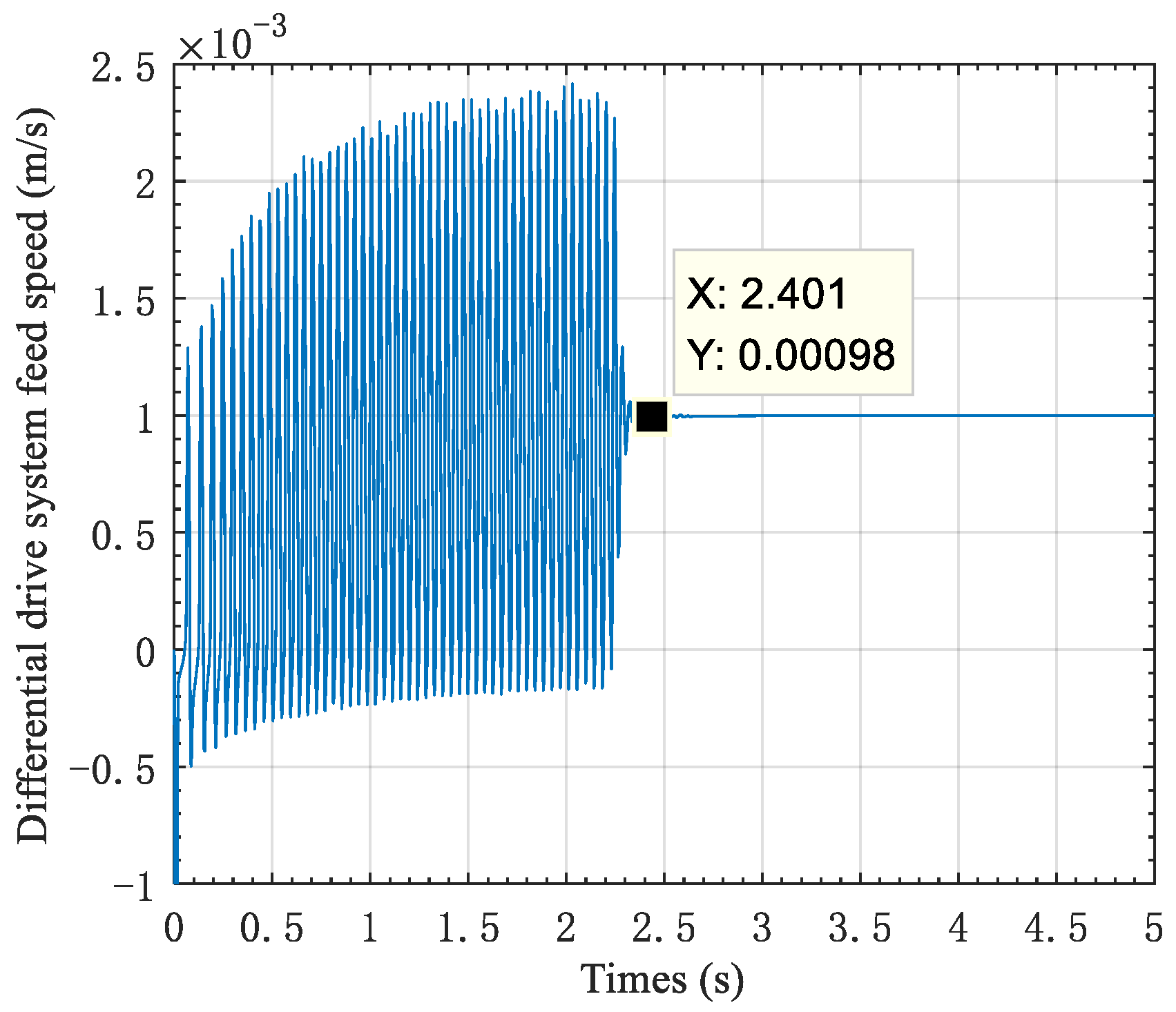
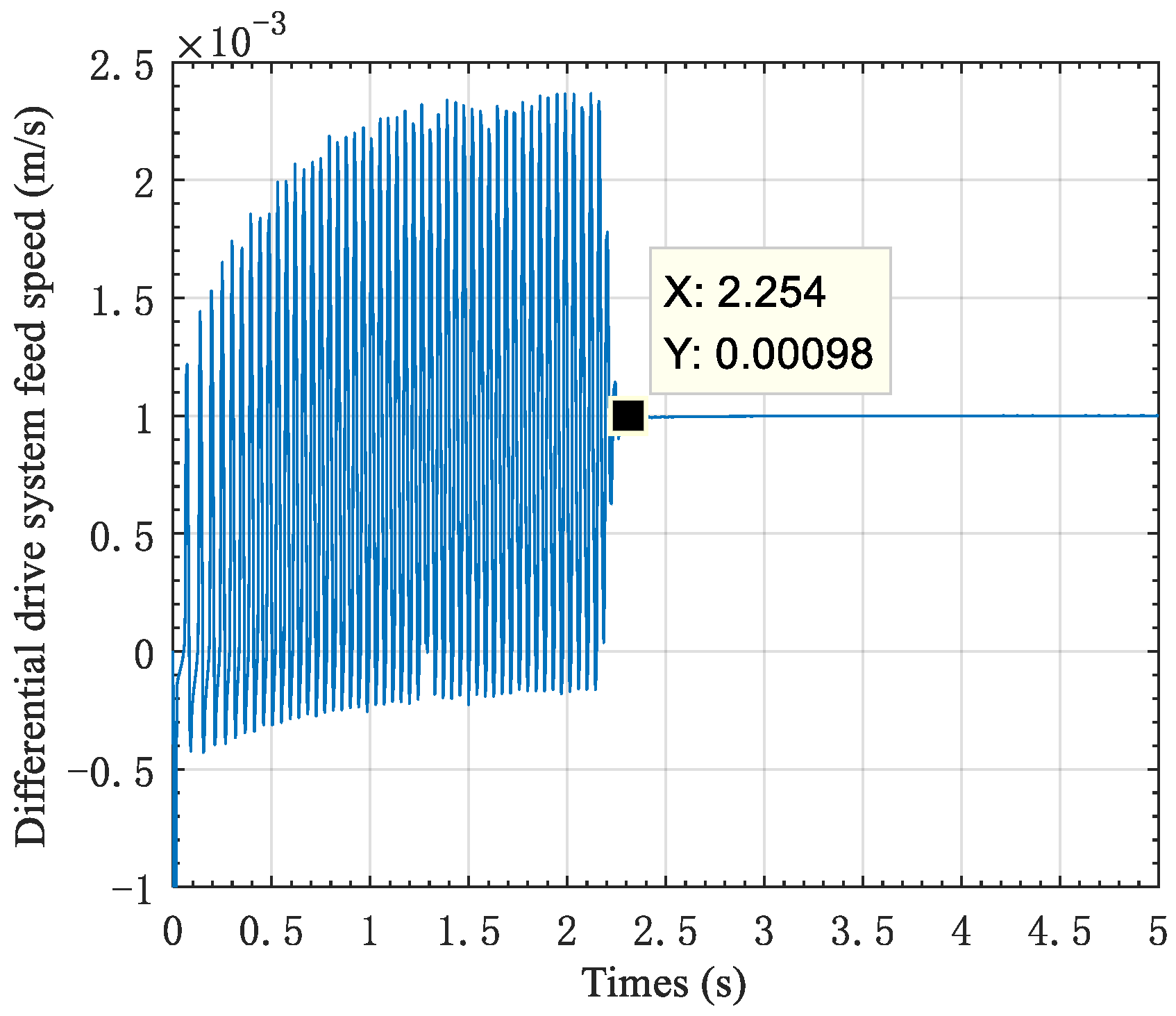
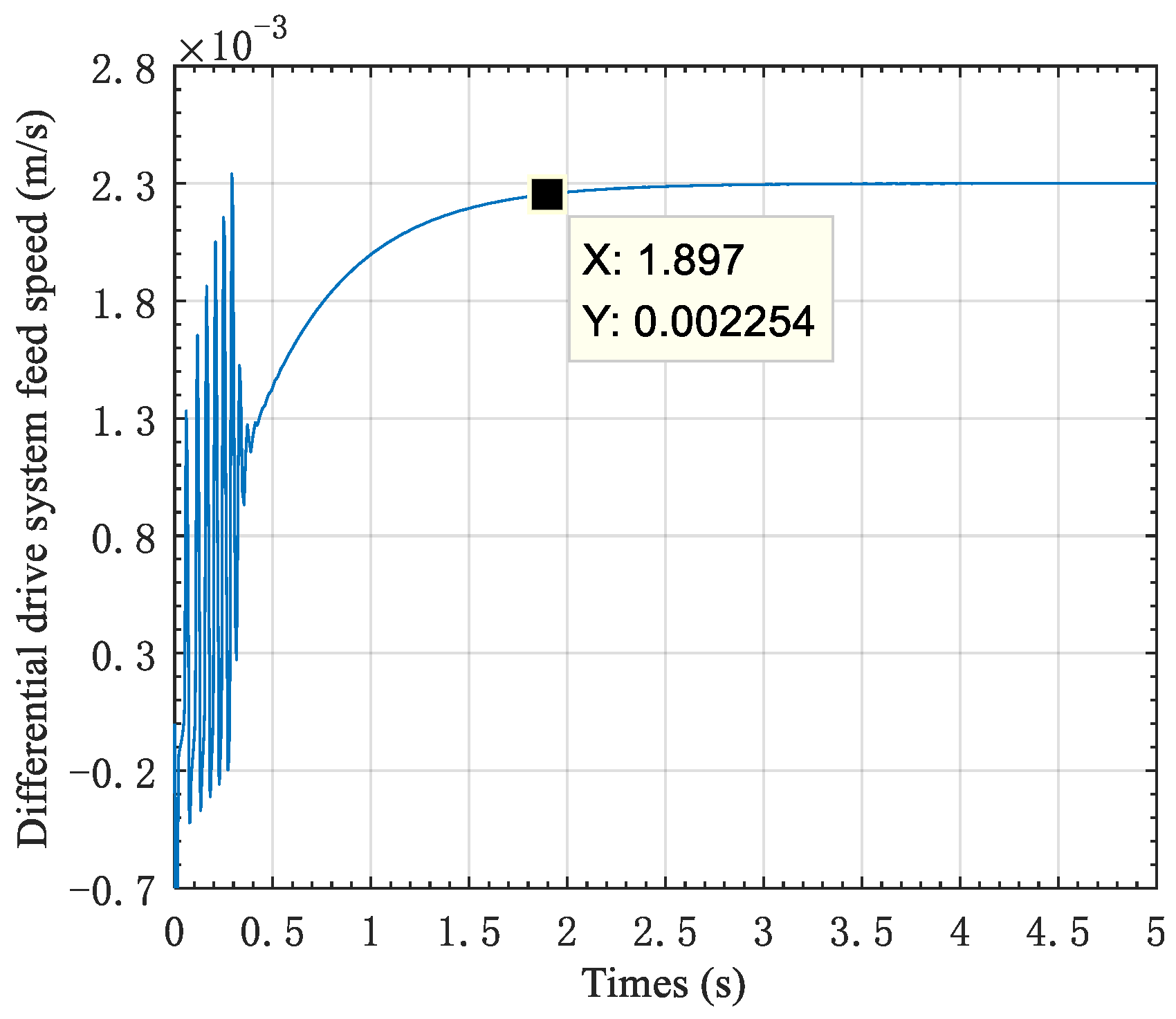
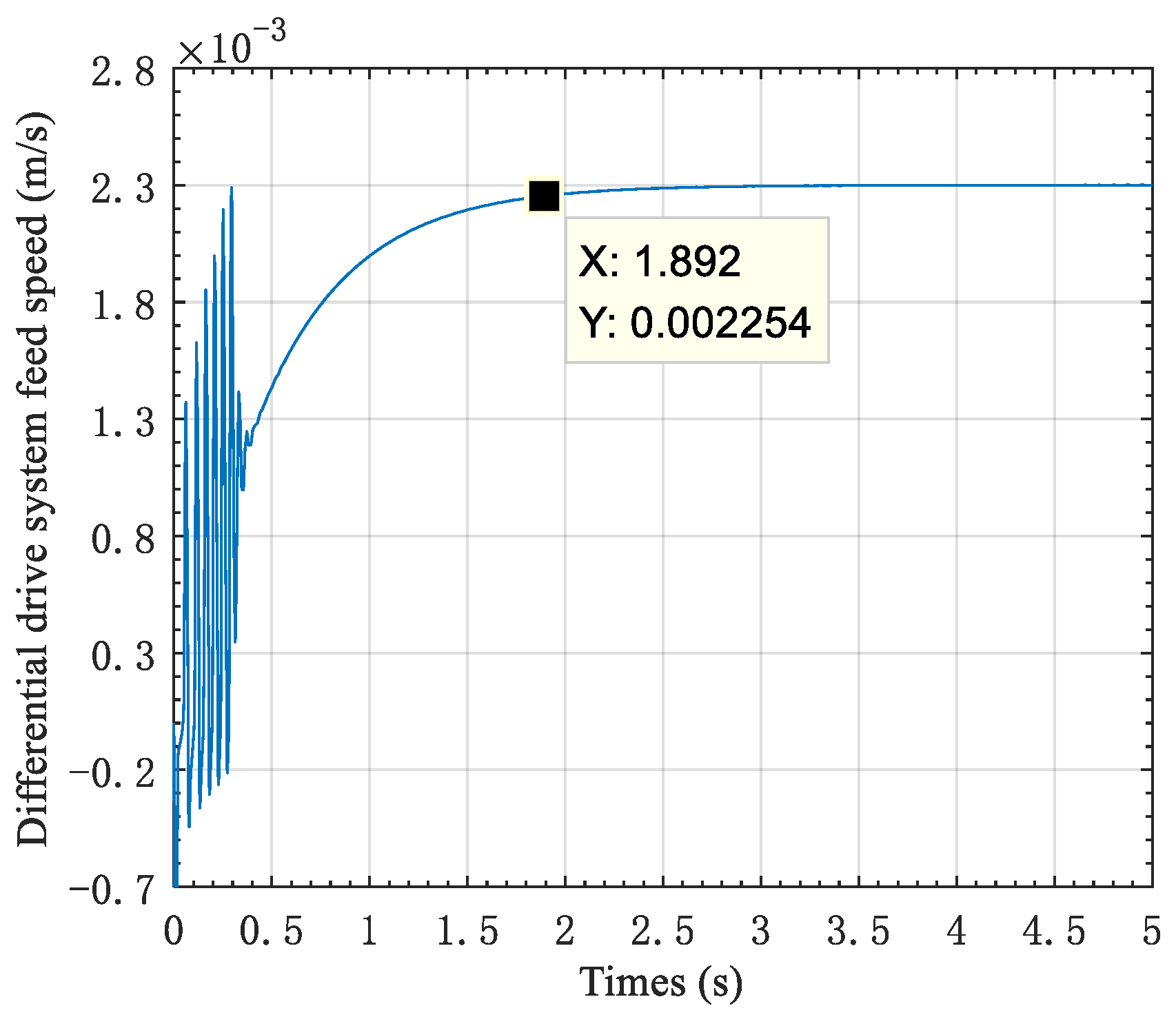
4.2. Constant Speed Analysis
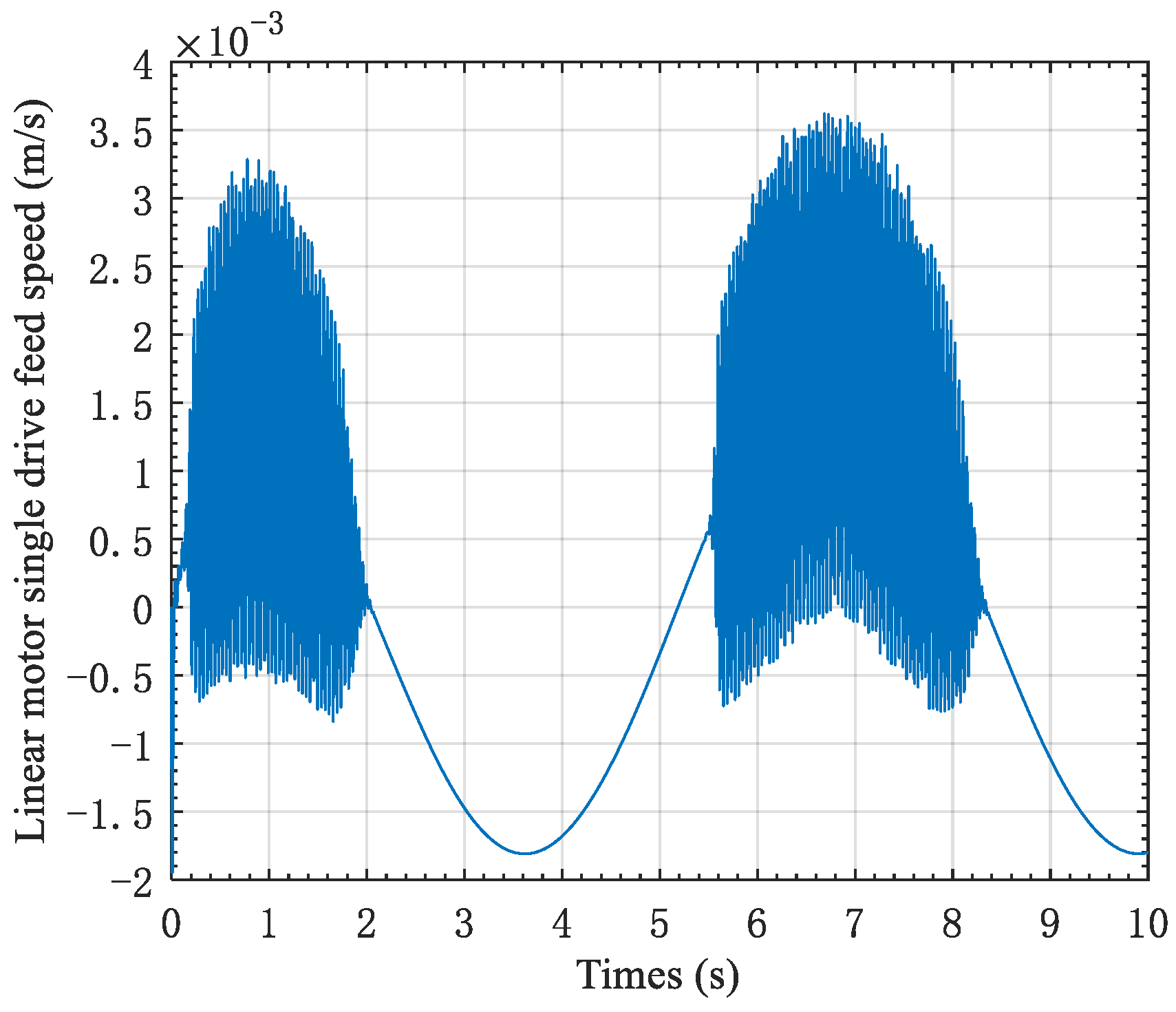
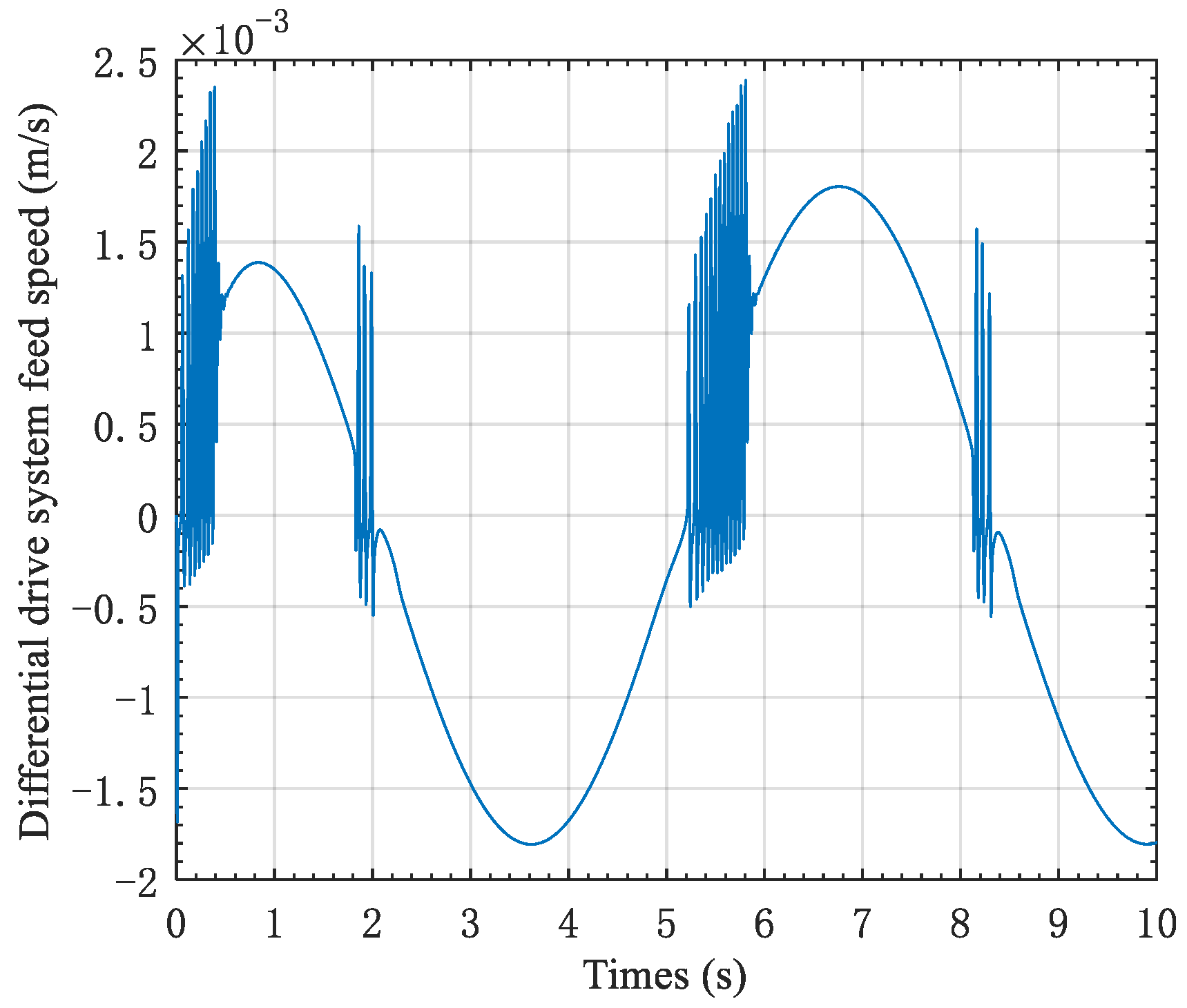
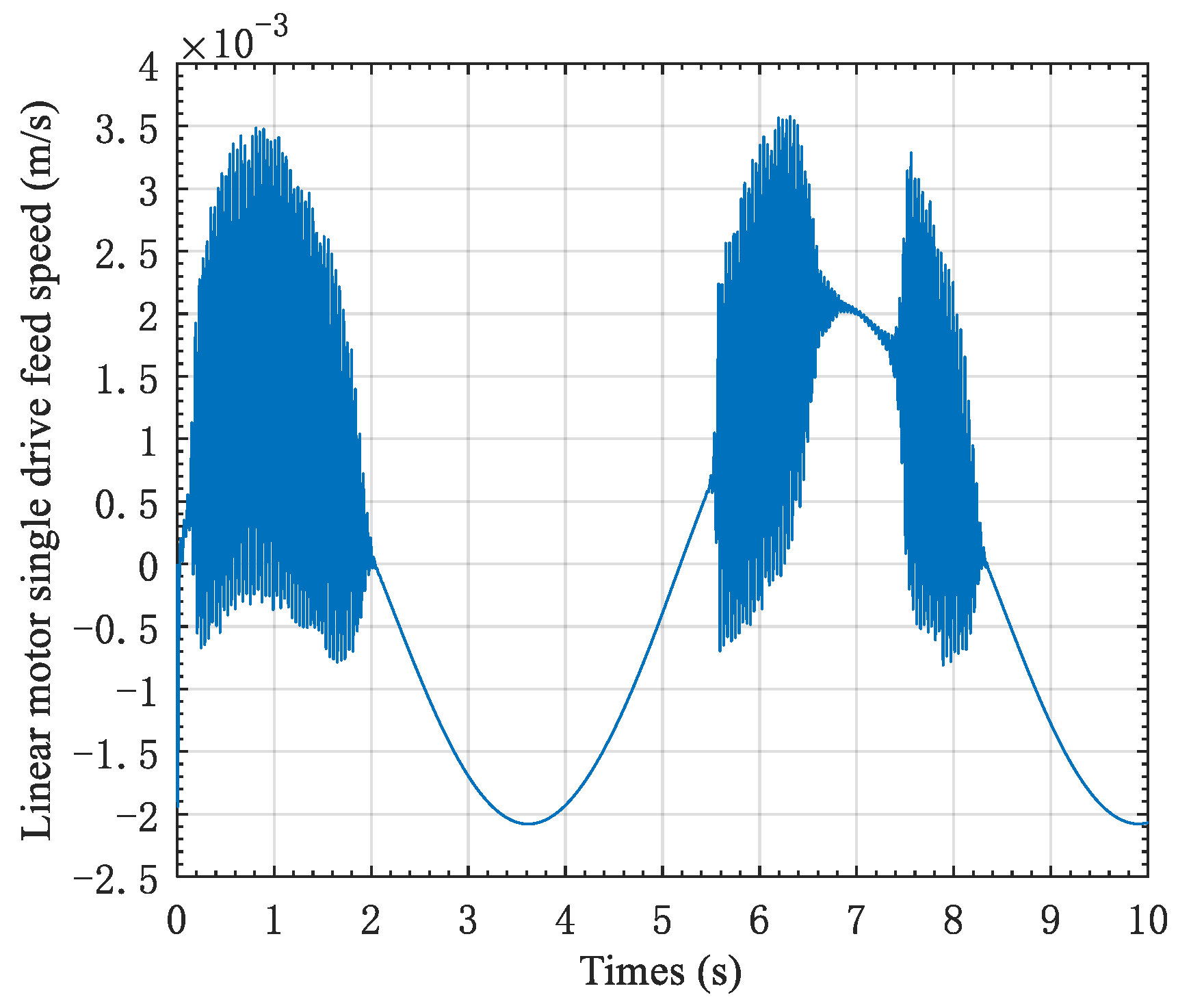
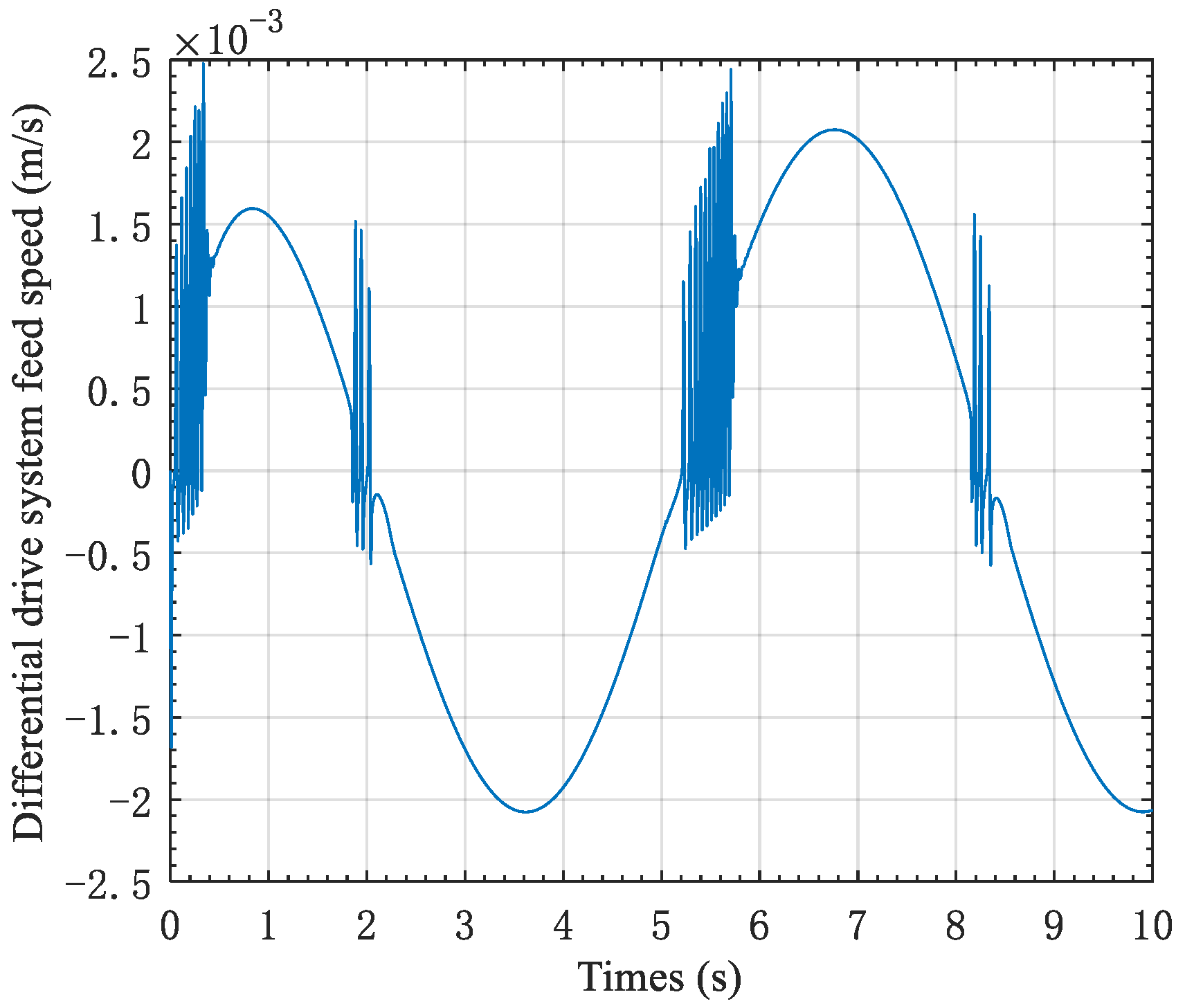
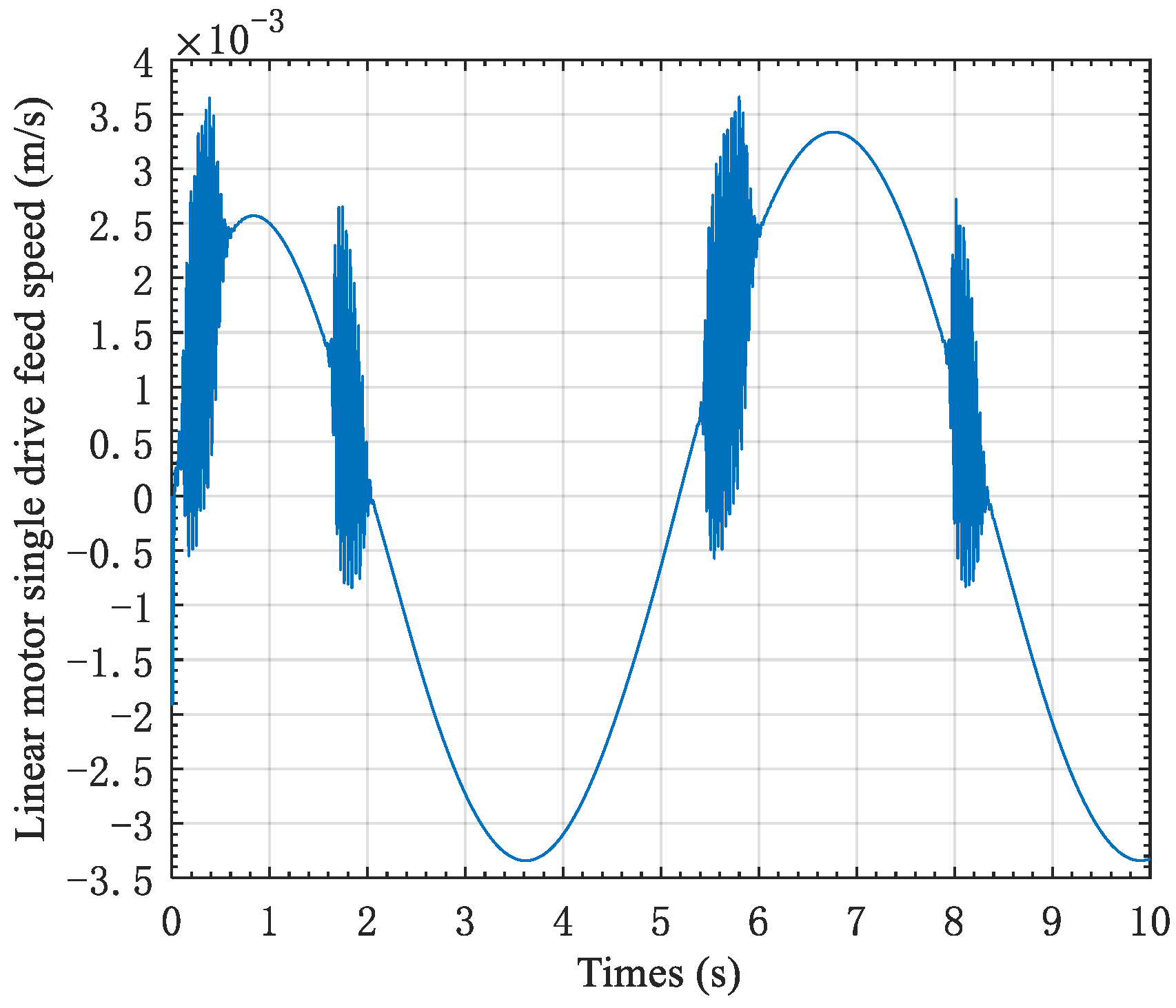
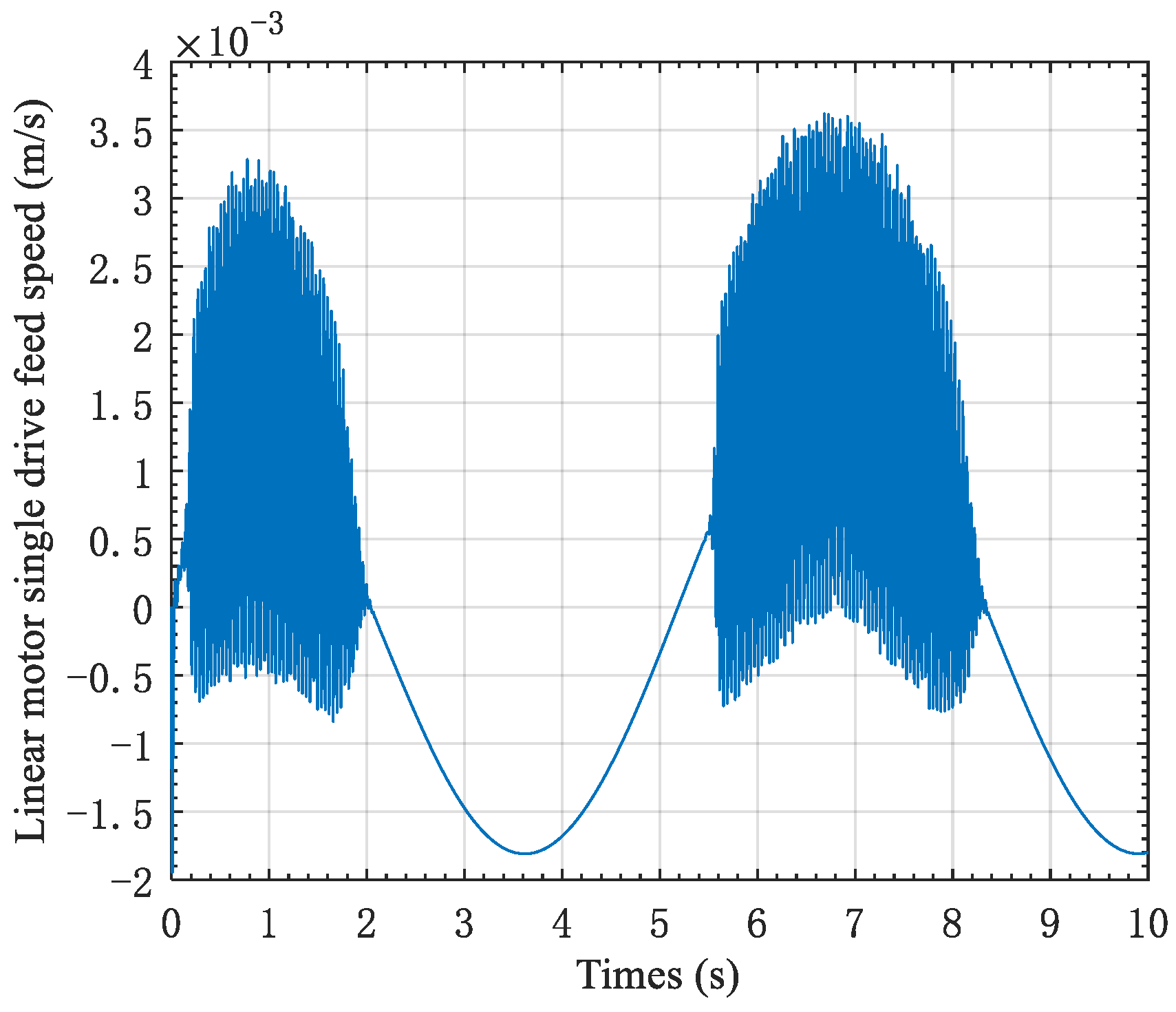
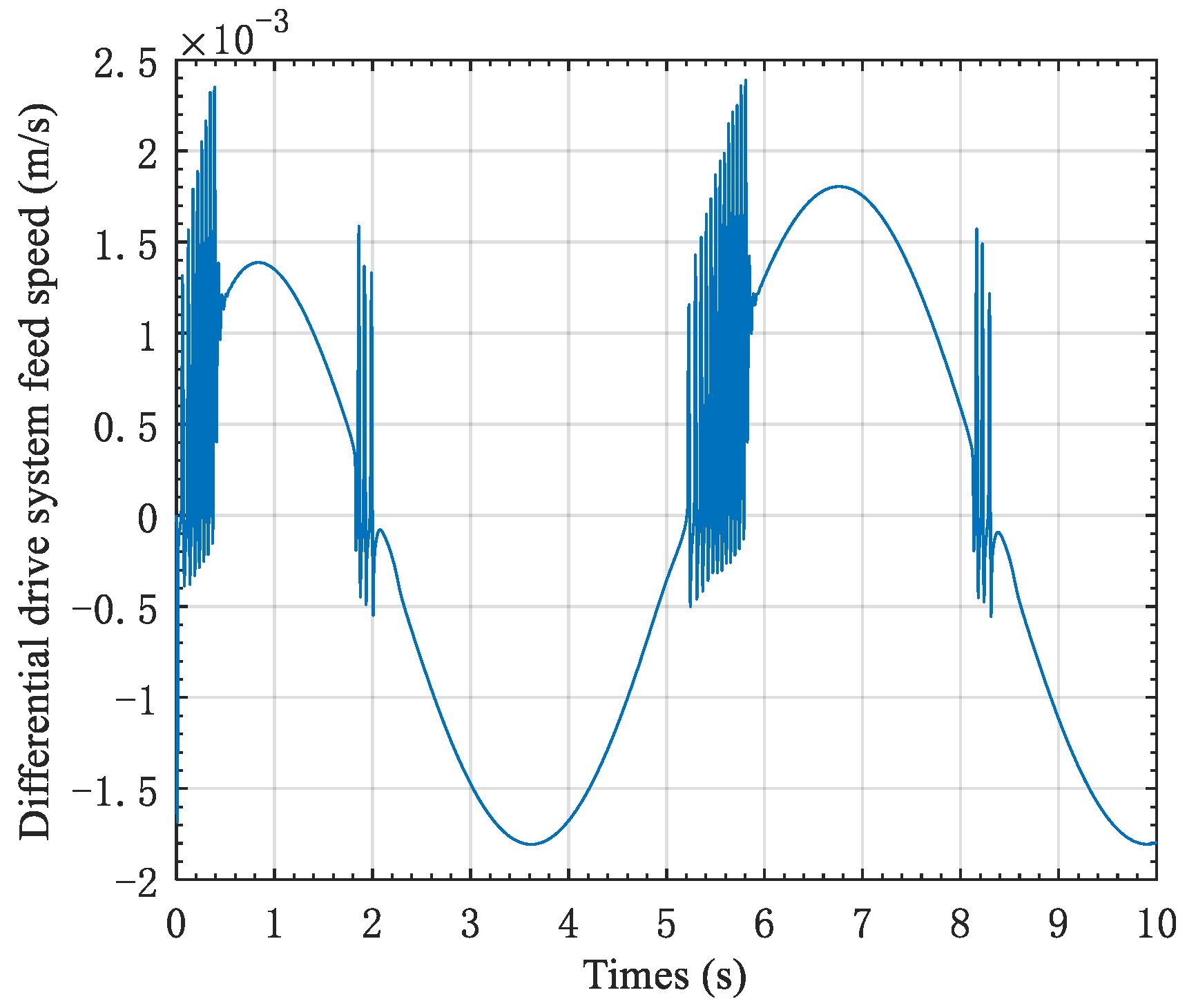
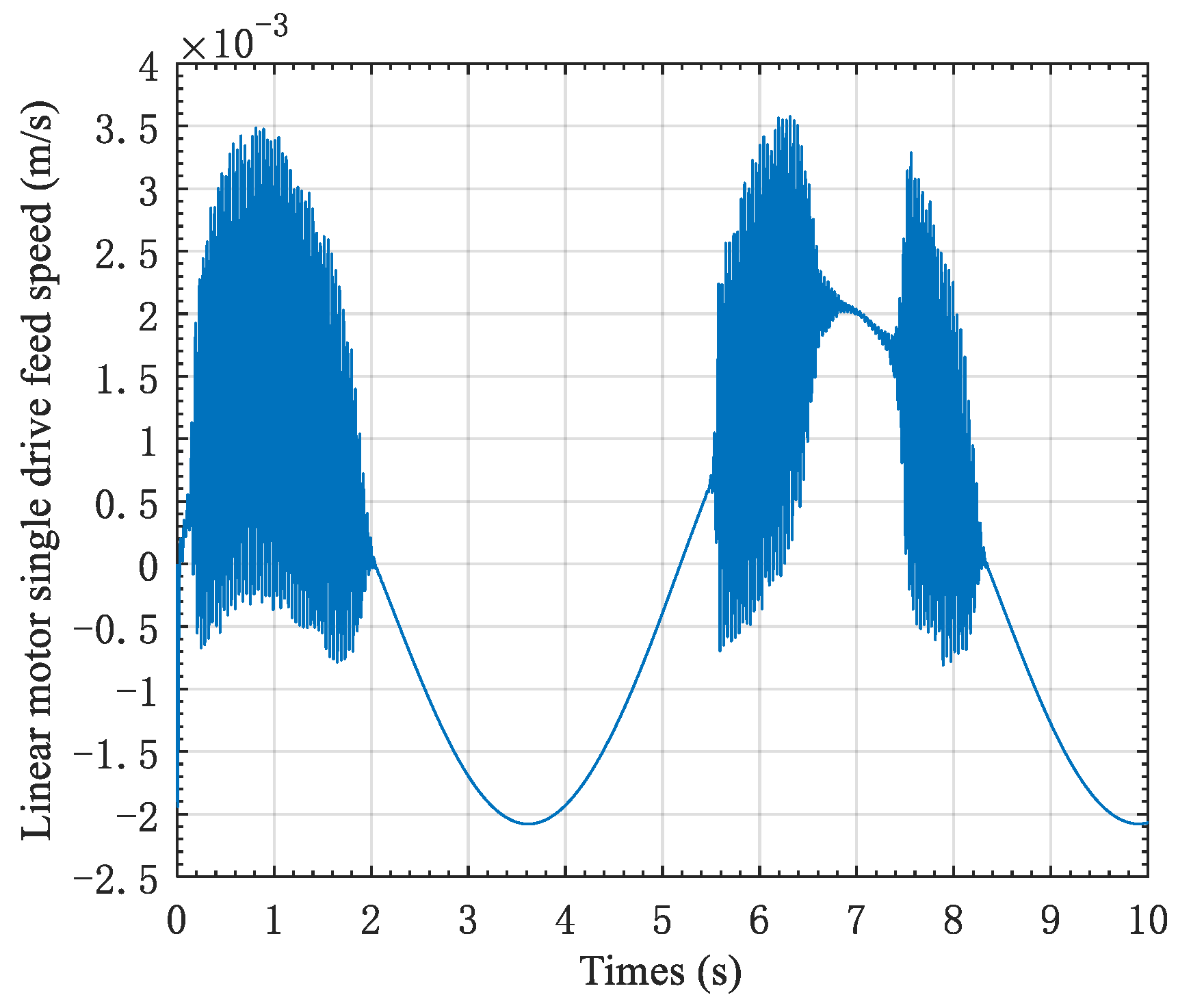
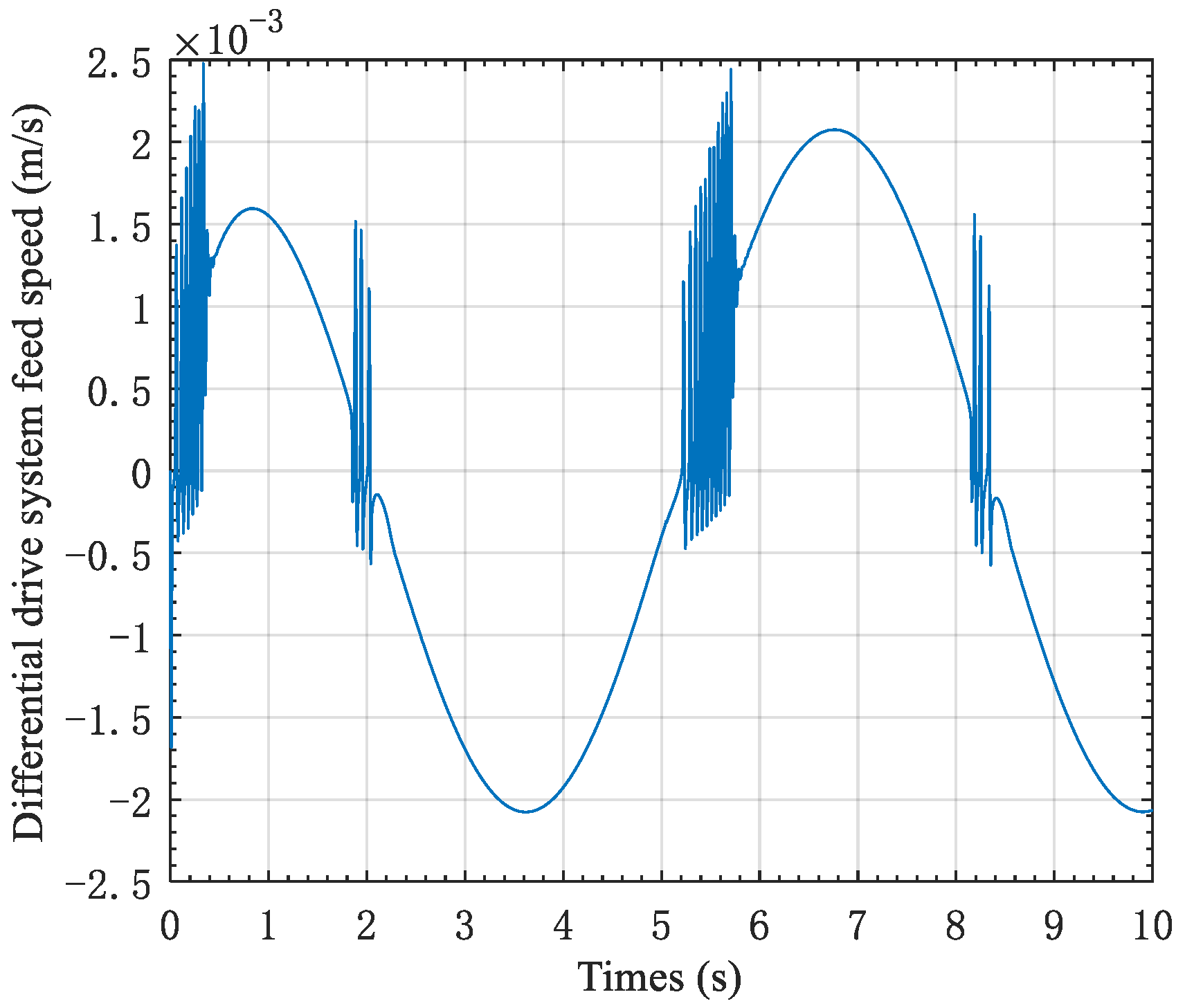
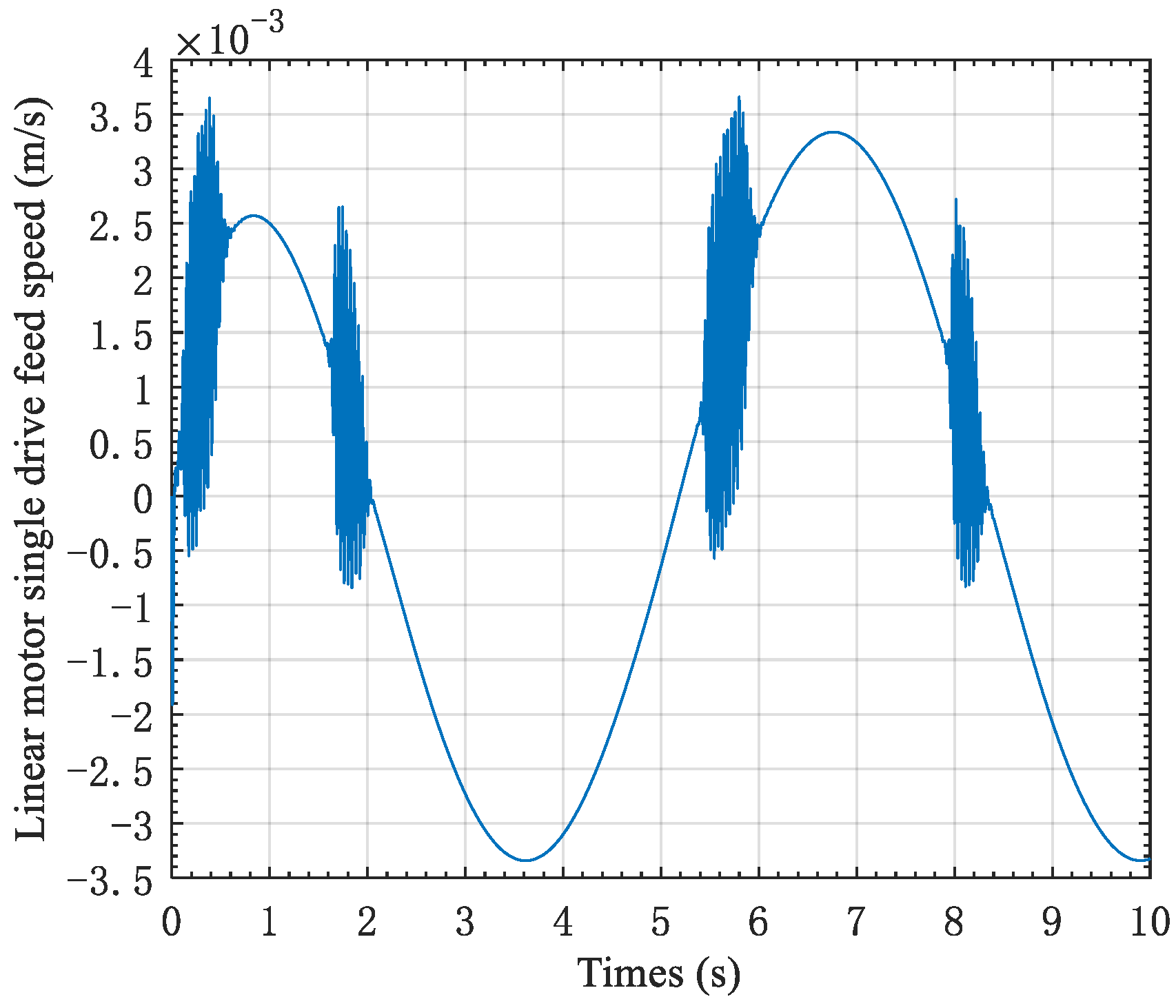
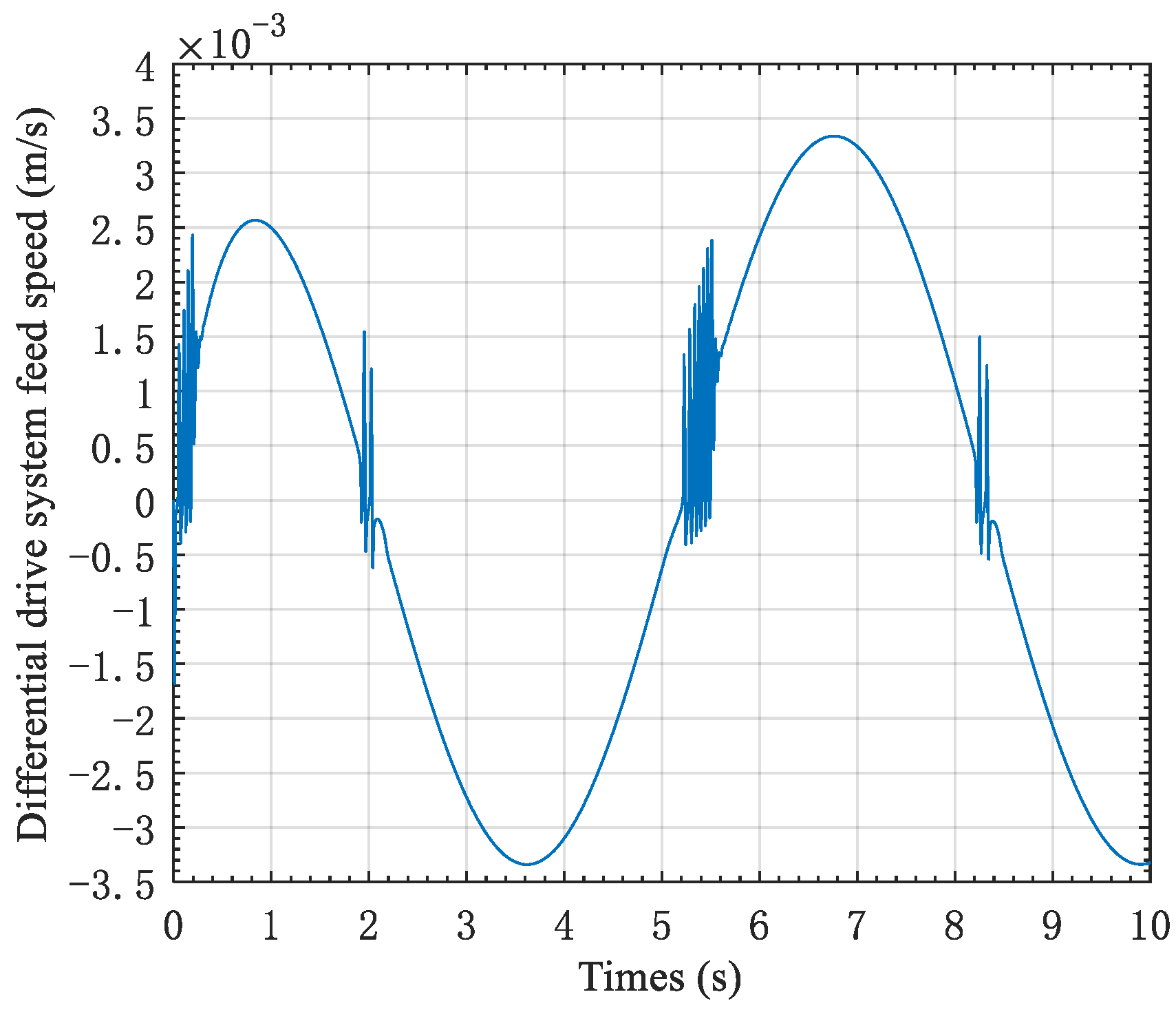
4.3. Variable Speed Analysis
5. Conclusions
- (1)
- A dual linear-motor differential-drive system has been designed and the dynamic model for electromechanical coupling of the system has been created by a lumped parameter approach. In addition, the transfer function block diagram has also been plotted for simulating such system models as mechanical, motor, and frictional, where the closed-loop feeding system is taken into account.
- (2)
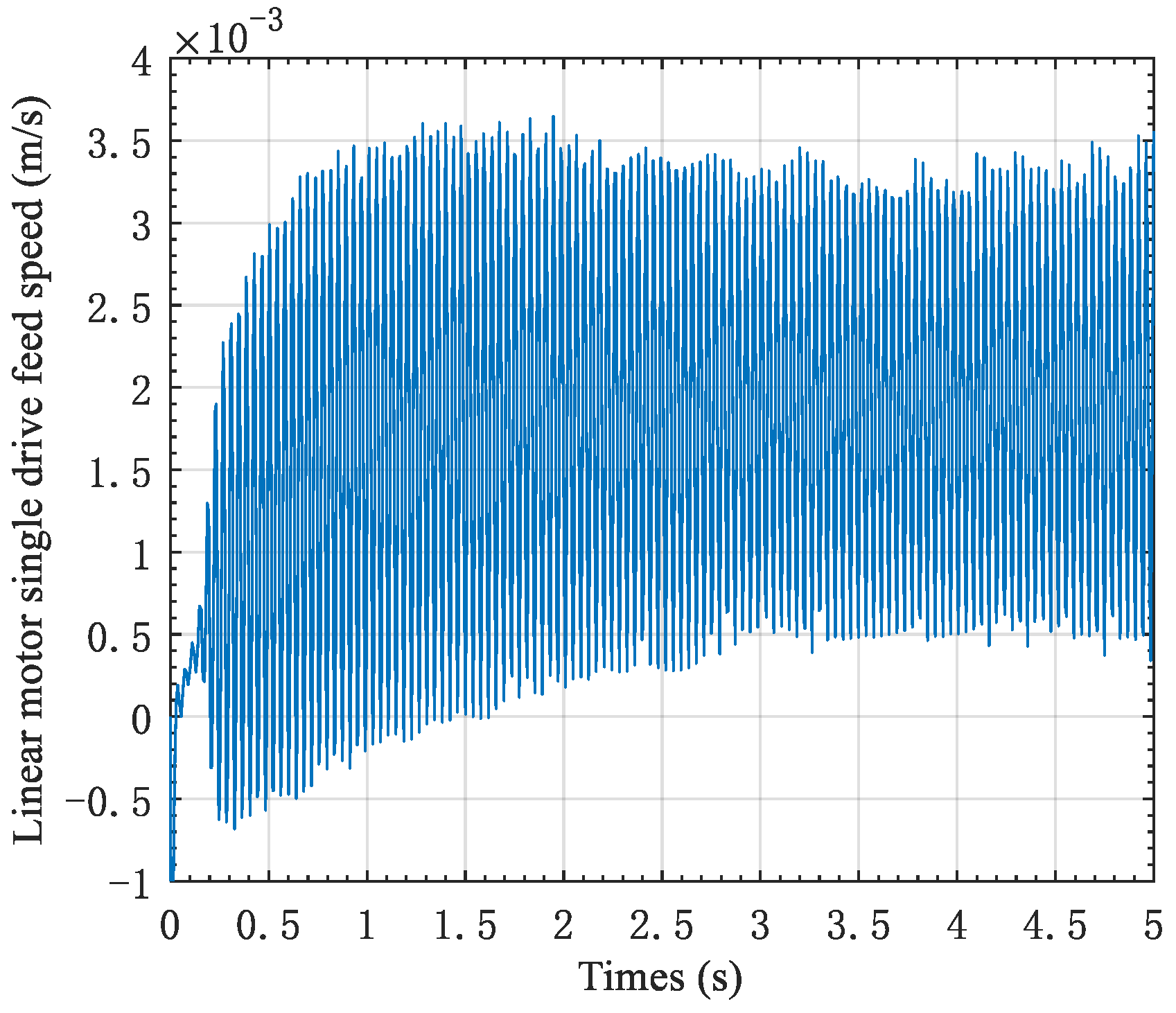
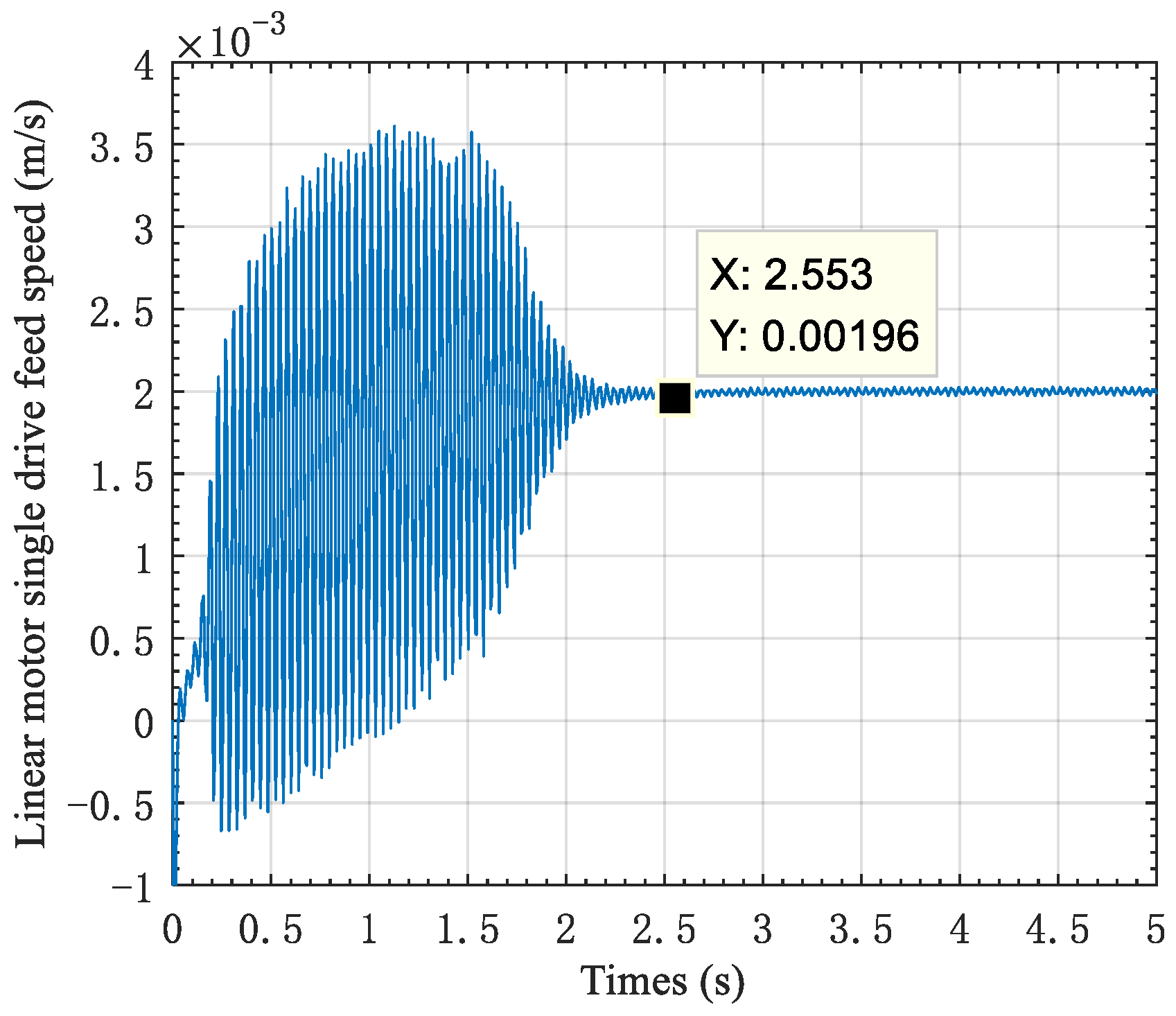
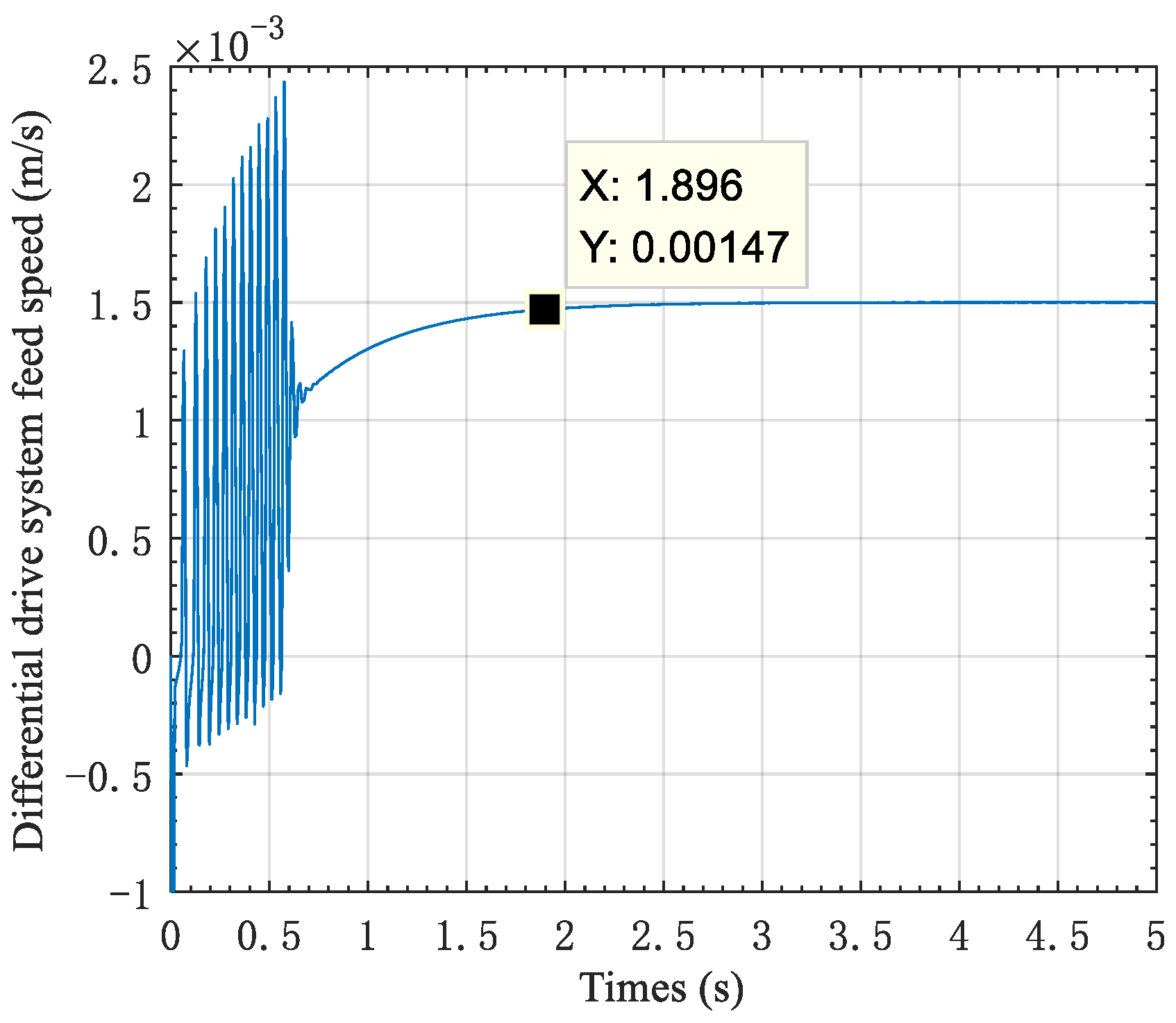
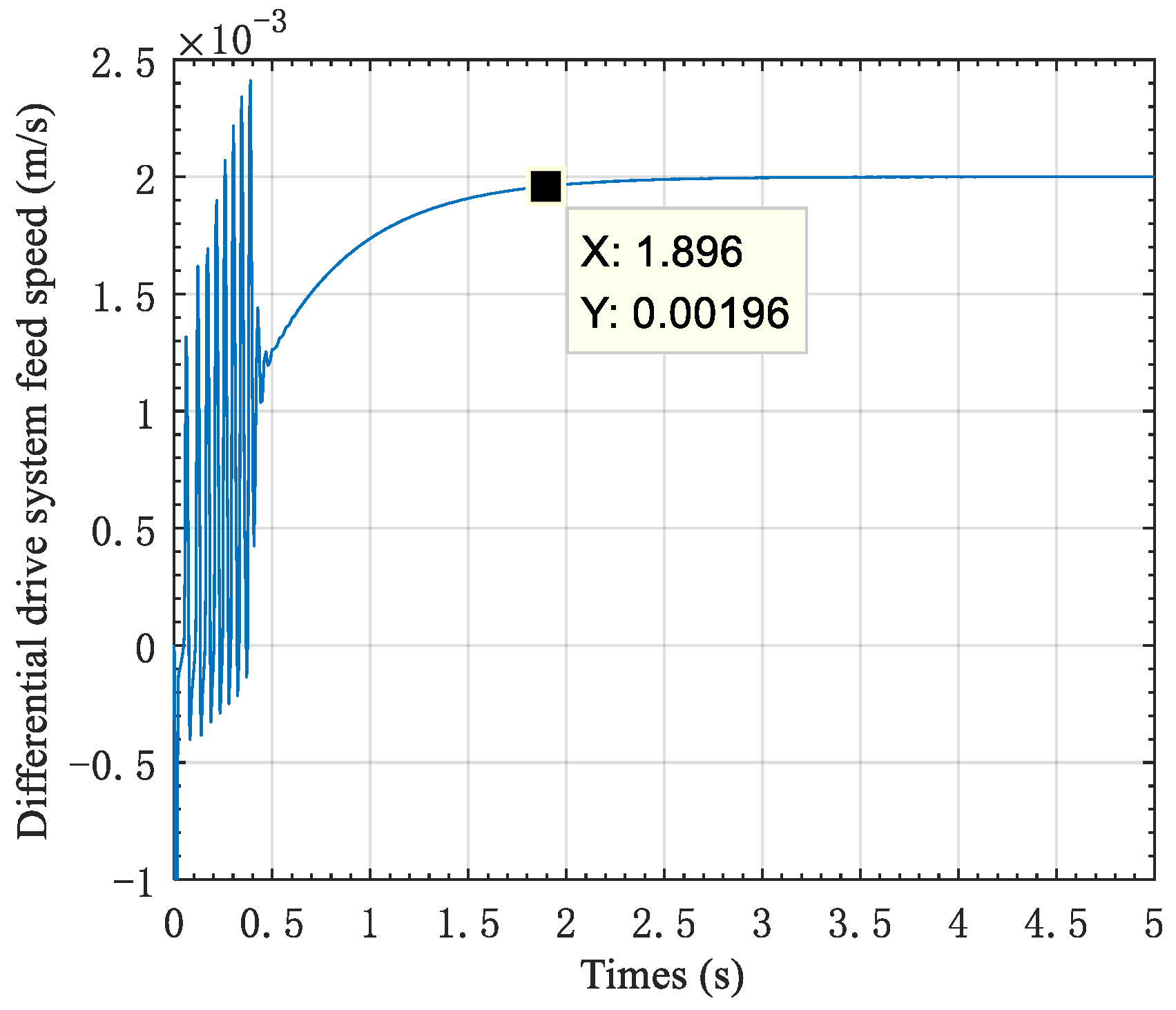
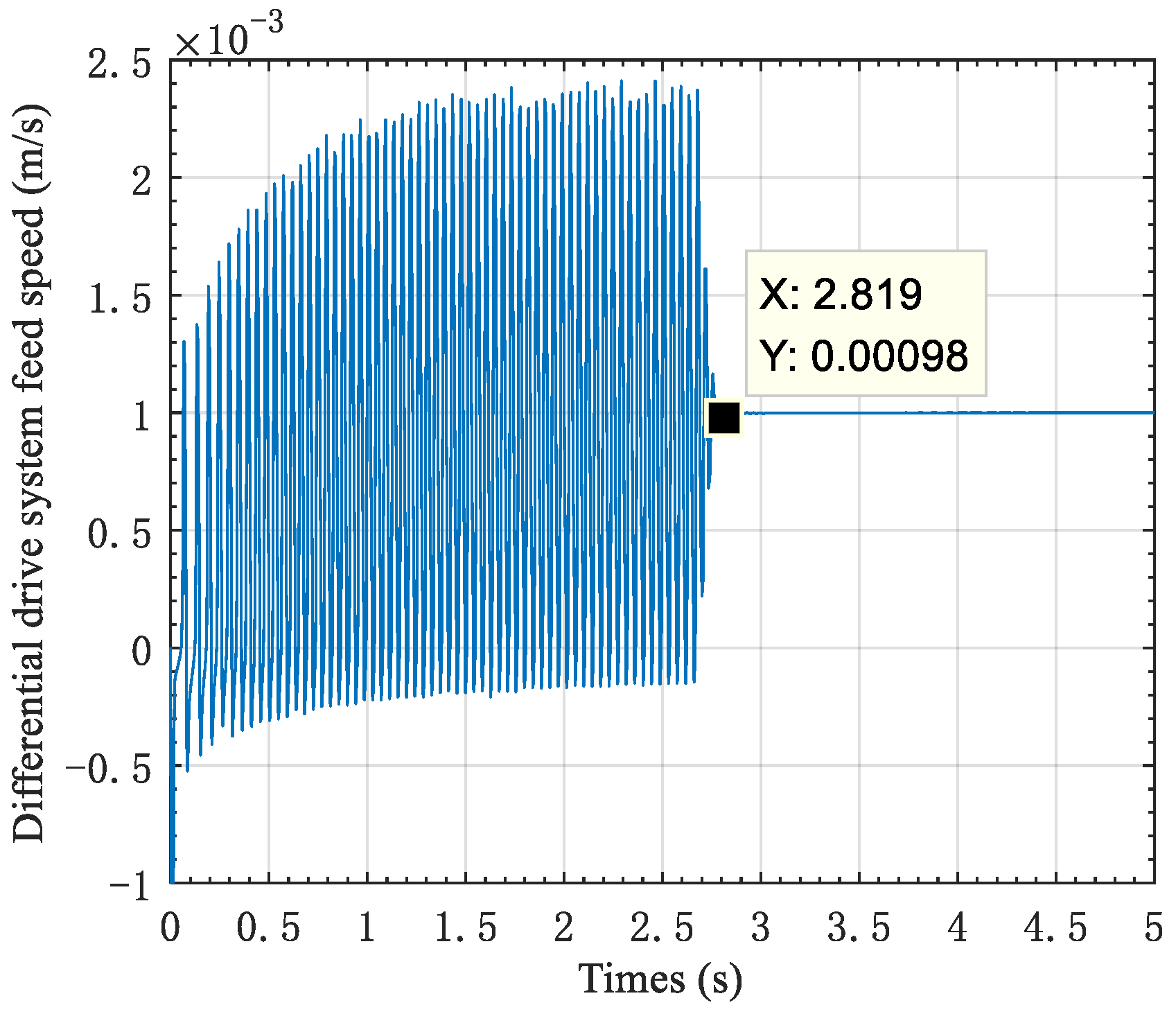
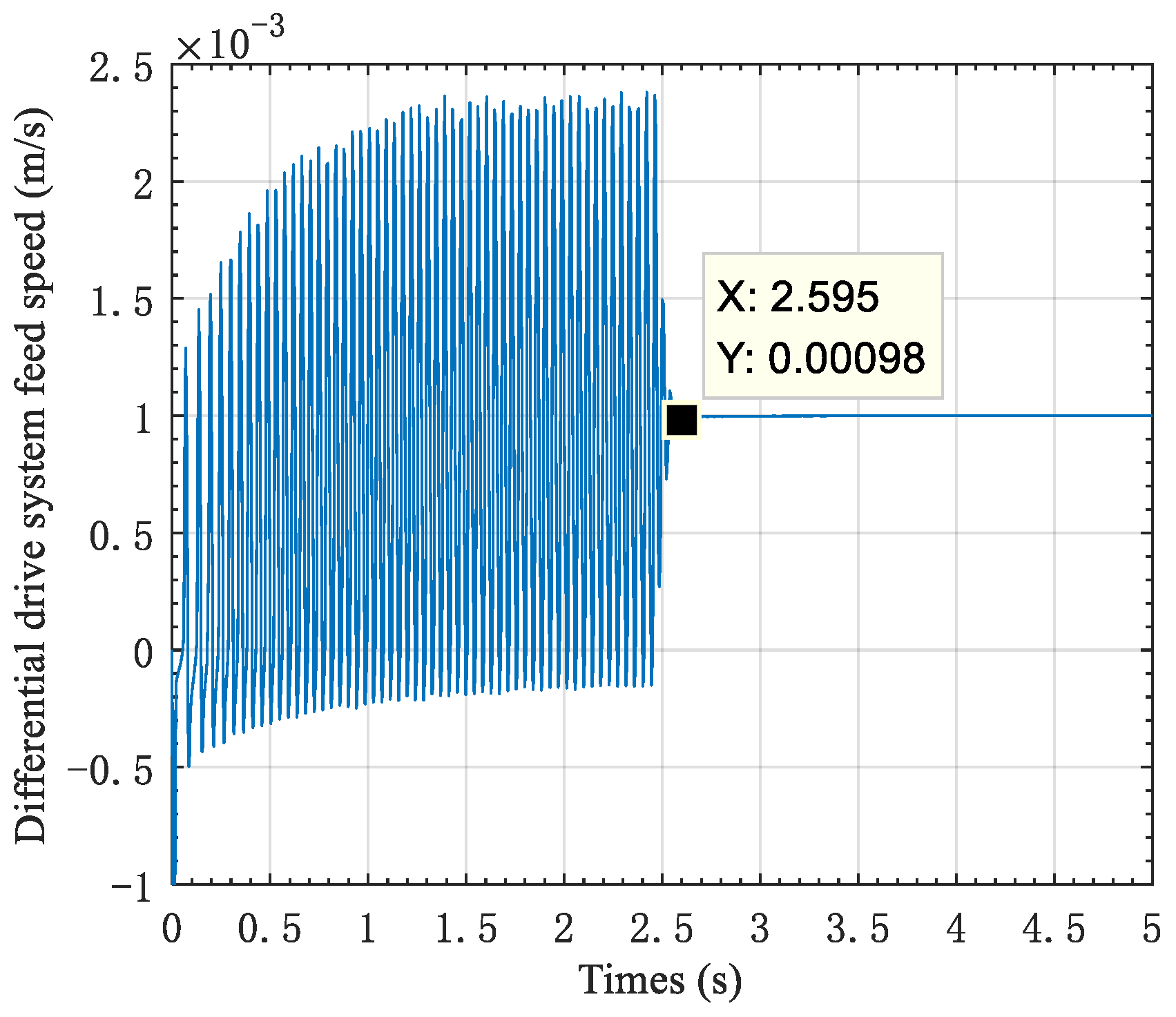
- Numerical simulations reveal that the critical creeping velocity of a dual linear-motor differential-drive micro-feed system is lower than that of a linear-motor single-drive feed system. For a particular dual linear-motor differential-drive micro-feed system, the output velocity is impacted by the integration of two different linear motor feed velocities. By numerical analysis, the differences between the lowest stable feed velocity from the minimum feed velocity of our dual linear-motor differential-drive system can be obtained.
- (3)
- As found by the output velocity analysis under the fixed and variable velocity conditions for the dual linear-motor differential-drive micro-feed system and the linear-motor single-drive feed system, the former boasts faster responsiveness and superior low-velocity micro-feed performance.
- (4)
- The results of theoretical computation and numerical analysis fundamentally agree with the actual engineering phenomenon, suggesting the rationality of the created models. The establishment of the system model paves the ground for further research concerning controller design.
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Paniselvam, V.; Tan, N.Y.; Anantharajan, S.K. A Review on the Design and Application of Compliant Mechanism-Based Fast-Tool Servos for Ultraprecision Machining. Machines 2023, 11, 450. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, C.; Cheung, C.F.; Wang, C.; Li, K.; Bulla, B. Micro/nano incremental material removal mechanisms in high-frequency ultrasonic vibration-assisted cutting of 316L stainless steel. Int. J. Mach. Tools Manuf. 2023, 191, 104064. [Google Scholar] [CrossRef]
- Wu, S.; Hu, C.; Zhao, Z.; Zhu, Y. High Accuracy Sensorless Control of Permanent Magnet Linear Synchronous Motors for Variable Speed Trajectories. IEEE Trans. Ind. Electron. 2024, 71, 4396–4406. [Google Scholar] [CrossRef]
- Lin, C.-G.; Yang, Y.-N.; Chu, J.-L.; Sima, C.; Liu, P.; Qi, L.-B.; Zou, M.-S. Study on nonlinear dynamic characteristics of propulsion shafting under friction contact of stern bearings. Tribol. Int. 2023, 183, 108391. [Google Scholar] [CrossRef]
- Jin, H.Y.; Gong, Y.W.; Zhao, X.M. High precision tracking control for linear servo system based on intelligent second-order complementary sliding mode. Electr. Eng. 2024, 106, 1105–1120. [Google Scholar] [CrossRef]
- Golzarzadeh, M.; Oraee, H.; Ganji, B. Lumped parameter thermal model for segmental translator linear switched reluctance motor. IET Electr. Power Appl. 2023, 17, 1548–1561. [Google Scholar] [CrossRef]
- Ullah, W.; Khan, F.; Umair, M.; Khan, B. Analytical methodologies for design of segmented permanent magnet consequent pole flux switching machine: A comparative analysis. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2021, 40, 744–767. [Google Scholar] [CrossRef]
- Far, M.F.; Martin, F.; Belahcen, A.; Rasilo, P.; Awan, H.A.A. Real-time control of an IPMSM using model order reduction. IEEE Trans. Ind. Electron. 2021, 68, 2005–2014. [Google Scholar] [CrossRef]
- Ullah, N.; Khan, F.; Basit, A.; Ullah, W.; Haseeb, I. Analytical airgap field model and experimental validation of double sided hybrid excited linear flux switching machine. IEEE Access 2021, 9, 117120–117131. [Google Scholar] [CrossRef]
- Waheed, A.; Ro, J.S. Analytical modeling for optimal rotor shape to design highly efficient line-start permanent magnet synchronous motor. IEEE Access 2020, 8, 145672–145686. [Google Scholar] [CrossRef]
- Yu, H.; Sun, Q.; Wang, C.; Zhao, Y. Frequency response analysis of heavy-load palletizing robot considering elastic deformation. Sci. Prog. 2020, 103, 1–22. [Google Scholar] [CrossRef]
- Zhu, Y.; Xiao, M.; Lu, K.; Wu, Z.; Tao, B. A simplified thermal model and online temperature estimation method of permanent magnet synchronous motors. Appl. Sci. 2019, 9, 3158. [Google Scholar] [CrossRef]
- Luna, L.; López, K.; Garrido, R.; Mondié, S.; Cantera, L. A Delay-based Nonlinear Controller for Nanopositioning of Linear Ultrasonic Motors. Int. J. Control Autom. Syst. 2024, 22, 36–47. [Google Scholar] [CrossRef]
- Zhang, W.; Song, Q.; Lai, W.; Wang, M.; Sun, P. Analysis of the dynamic characteristics of the gear-shifting process under external excitation. Adv. Mech. Eng. 2023, 15, 16878132231216627. [Google Scholar] [CrossRef]
- Li, H.; Liu, Y.X.; Deng, J. Dynamic Modeling and Experimental Research on Low-Speed Regulation of a Bending Hybrid Linear Ultrasonic Motor. IEEE Trans. Ind. Electron. 2023. [Google Scholar] [CrossRef]
- Li, Y.R.; Peng, C.C. Encoder position feedback based indirect integral method for motor parameter identification subject to asymmetric friction. Int. J. Non-Linear Mech. 2023, 152, 104386. [Google Scholar] [CrossRef]
- Yang, Q.; Peng, D.; Cai, J.; Guo, D.; He, Z. Adaptive backstepping control for permanent magnet linear motors against uncertainties and disturbances. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2023, 237, 1195–1205. [Google Scholar] [CrossRef]
- Lee, K.H.; Kim, H.; Kuc, T.Y. State observer based on an accelerometer for an elastic joint with nonlinear friction. Appl. Sci. 2022, 12, 12991. [Google Scholar] [CrossRef]
- Chang, H.; Lu, S.; Zheng, S.; Shi, P.; Song, B. Integrated parameter identification based on a topological structure for servo resonance suppression. IEEE Trans. Ind. Electron. 2024, 71, 4541–4550. [Google Scholar] [CrossRef]
- Chen, Y.Z.; Lai, L.J.; Zhu, L.M. Structural design and experimental evaluation of a coarse-fine parallel dual-actuation XY flexure micropositioner with low interference behavior. Rev. Sci. Instrum. 2023, 94, 095006. [Google Scholar] [CrossRef]
- Shang, D.; Li, X.; Yin, M.; Li, F. Dynamic modeling and neural network compensation for dual-flexible servo system with an underactuated hand. J. Frankl. Inst. 2023, 360, 10127–10164. [Google Scholar] [CrossRef]
- Yang, X.; Wang, X.; Wang, S.; Wang, K.; Sial, M.B. Finite-time adaptive dynamic surface synchronization control for dual-motor servo systems with backlash and time-varying uncertainties. ISA Trans. 2023, 137, 248–262. [Google Scholar] [CrossRef] [PubMed]
- Wang, B.F.; Iwasaki, M.; Yu, J.P. Finite-Time Command-Filtered Backstepping Control for Dual-Motor Servo Systems with LuGre Friction. IEEE Trans. Ind. Inform. 2023, 19, 6376–6386. [Google Scholar] [CrossRef]
- Yu, H.; Zhang, L.; Wang, C.; Feng, X. Dynamic characteristics analysis and experimental of differential dual drive servo feed system. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2021, 235, 6737–6751. [Google Scholar] [CrossRef]
- Jiang, H.; Fu, H.; Han, Z.; Jin, H. Elimination of gear clearance for the rotary table of ultra heavy duty vertical milling lathe based on dual servo motor driving system. Appl. Sci. 2020, 10, 4050. [Google Scholar] [CrossRef]
- Yu, H.W.; Geng, F.Q.; Wang, C.; Guo, A.F.; Li, H.S.; Zhang, L.G. A Dual Linear Motor Differential Micro Feed Servo System and Control Method. Chinese Invention Patent ZL 2020 1 0517725.3, October 8, 2021. (In Chinese). [Google Scholar]
- de Wit, C.C.; Olsson, H.; Astrom, K.; Lischinsky, P. A new model for control of systems with friction. IEEE Trans. Autom. Control. 1995, 40, 419–425. [Google Scholar] [CrossRef]
- Yu, H.W.; Zhang, Z.Z.; Xing, J.F. Micro feed characteristic analysis of a new crawler guide rail dual drive servo system. Sci. Prog. 2021, 104, 1–24. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Given Value |
|---|---|
| position loop gain | 7.5 |
| command velocity adjusting the gain | 150 |
| velocity loop gain | 25 |
| current loop gain | 5 |
| motor driving force constant | 0.75 |
| back EMF coefficient | 0.2 |
| motor armature inductance | 5.5 |
| motor armature resistance | 1 |
| the equivalent mass of the linear motor actuator | 12 |
| the equivalent viscous friction coefficient on the linear motor actuator | 2 |
| equivalent mass of the table | 50 |
| guide viscous friction coefficient | 8 |
| the comprehensive equivalent stiffness | |
| static friction | 25 |
| coulomb friction | 15 |
| Stribeck velocity | 0.0012 |
| transmission efficiency | 0.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yu, H.; Zheng, G.; Liu, Y.; Zhao, J.; Wei, G.; Jiang, H. Research on the Dynamic Characteristics of a Dual Linear-Motor Differential-Drive Micro-Feed Servo System. Appl. Sci. 2024, 14, 3170. https://doi.org/10.3390/app14083170
Yu H, Zheng G, Liu Y, Zhao J, Wei G, Jiang H. Research on the Dynamic Characteristics of a Dual Linear-Motor Differential-Drive Micro-Feed Servo System. Applied Sciences. 2024; 14(8):3170. https://doi.org/10.3390/app14083170
Chicago/Turabian StyleYu, Hanwen, Guiyuan Zheng, Yandong Liu, Jiajia Zhao, Guozhao Wei, and Hongkui Jiang. 2024. "Research on the Dynamic Characteristics of a Dual Linear-Motor Differential-Drive Micro-Feed Servo System" Applied Sciences 14, no. 8: 3170. https://doi.org/10.3390/app14083170
APA StyleYu, H., Zheng, G., Liu, Y., Zhao, J., Wei, G., & Jiang, H. (2024). Research on the Dynamic Characteristics of a Dual Linear-Motor Differential-Drive Micro-Feed Servo System. Applied Sciences, 14(8), 3170. https://doi.org/10.3390/app14083170